) Aplicación del Método de Hamilton- Jacobi para la...
34
Transcript of ) Aplicación del Método de Hamilton- Jacobi para la...

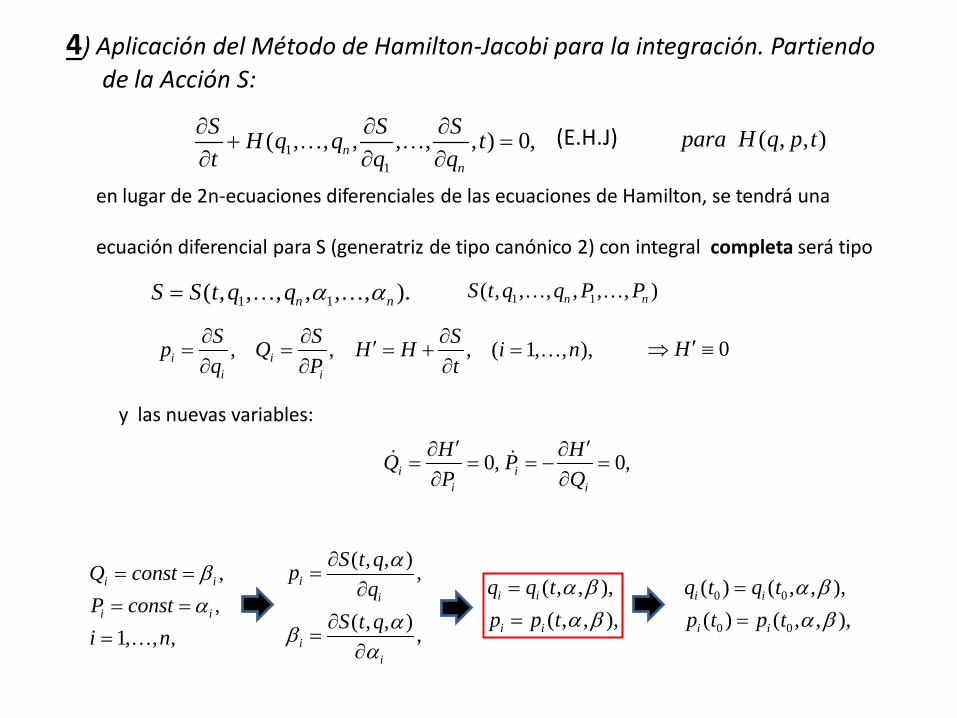
4) Aplicación del Método de Hamilton-Jacobi para la integración. Partiendo de la Acción S:
11
( , , , , , , ) 0,nn
S S SH q q tt q q
∂ ∂ ∂+ =
∂ ∂ ∂
(E.H.J)
en lugar de 2n-ecuaciones diferenciales de las ecuaciones de Hamilton, se tendrá una ecuación diferencial para S (generatriz de tipo canónico 2) con integral completa será tipo
1 1( , , , , , , ).n nS S t q q α α=
, , , ( 1, , ),i ii i
S S Sp Q H H i nq P t∂ ∂ ∂′= = = + =∂ ∂ ∂
( , , )para H q p t
1 1( , , , , , , )n nS t q q P P
y las nuevas variables:
0H ′⇒ ≡
0, 0,i ii i
H HQ PP Q′ ′∂ ∂
= = = − =∂ ∂
,,
1, , ,
i i
i i
Q constP consti n
βα
= == ==
( , , ) ,
( , , ) ,
ii
ii
S t qpq
S t q
α
αβα
∂=
∂∂
=∂
( , , ),( , , ),
i i
i i
q q tp p t
α βα β
==
0 0
0 0
( ) ( , , ),( ) ( , , ),
i i
i i
q t q tp t p t
α βα β
==

1 31 3
( , , , , , ) 0,S S SH q qt q q
∂ ∂ ∂+ =
∂ ∂ ∂
(E.H.J)
Como la Hamiltoniana es independiente del tiempo, y hay variables cíclicas, la ecuación
Puede resolverse probando separación de variables sucesivamente, con el tiempo sólo, se prueba:
1 3 1 3 0 1 3( , , , , , ) ( , , ) ,S W q q E tα α α α= −
Donde W es la acción reducida , con :
1 0( , )S W r z E tα φ= + − La ecuación en derivadas parciales sería:
22 2 2
2
2 2 2 2 221
1 02
22
0
1 1( , , ) 0
2 2
12 2
dando:
S S S S S S SH q t
q t r z r t
W Wr
r z r
r
E
φ φ
α ωα α
ω∂ ∂ ∂ ∂ ∂ Ω ∂ ∂+ = → + + + = −
∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ Ω ++ + + −Ω =
∂ ∂
+ −Ω
=
Pero aún puede realizarse otra separación de variables para W(r,z) según: 0 1 ( ) ( )r zWS t r W zα α φ + += − +
2 2 2 221
22
2 22
0 1 2
12 2 2
12 2
r
z
dW rdr r
y
dW zdz
α ω α
ω α α α
Ω + + + =
+ = −Ω −

, , 0,i ii i i
S W Sp Q y Hq q P∂ ∂ ∂ ′= = = =∂ ∂ ∂
,,
0,1,2
i i
i i
Q constP consti
βα
= == ==
Son dos ecuaciones diferenciales ordinarias desacopladas y resolubles por integración directa. La contribución en la variable radial se identifica con un problema de una partícula en un y potencial central la contribución en z con una problema en un potencial de un movimiento armónico simple: 2
2 2 212 2
2 20 1 2
2 ( )
2( )
r
z
W dr rr
W z
αα ω
α α α ω
= − − Ω +
= −Ω − −
∫
Ambas integrales son prácticamente inmediatas o se hallan en tablas de integrales elementales. Una vez encontradas las W (y la S) la solución del problema se obtiene de:
Observar que las integrales que dan las Q aparecerían también en la resolución del problema por el método de integración directa, ejm. para la parte radial:
2 23
22 2 22
22
22 2 21
2 2
2( )
( ) .2 2 2
/2 ( )r
Hr p
rpr
p r p r rr
pr r cter
drtr
r
φ
ωφ
ω α
αα ω
∂= =∂
= = − Ω +
Ω ++ + = =
→ = − − Ω +
∫
0
( , ) ,
( , ) ,
ii
i ii i
W qpq
E W qQ t
α
αβα α
∂=
∂∂ ∂
= + =∂ ∂

Comentarios y Cuestiones: ¿cuáles son los puntos de equilibrio en las ecuaciones de movimiento del sistema? ¿Son estables? ¿Por qué las soluciones r(t) y z(t) son periódicas en t? ¿Habrá soluciones periódicas? Interpretación física de la hamiltoniana inicial.

Ejercicio 1 (Una hora)Se considera un sistema lagrangiano de dos grados de libertad con lagrangiana
2 21 2
1 ( ) 2
L q q U= + − ,
en donde 2 211 2 1 2 2 12 ( ) ( )U q q q q q qα= + + + , siendo α una constante. Se pide:
A.- (7 puntos)1) Fuerzas generalizadas 1Q y 2Q asociadas al potencial U .2) Ecuaciones de Lagrange del movimiento.
3) Función de energía ( , , )E H q q t= & , función de las variables generalizadas ( , )q q& .4) Una constante de movimiento.
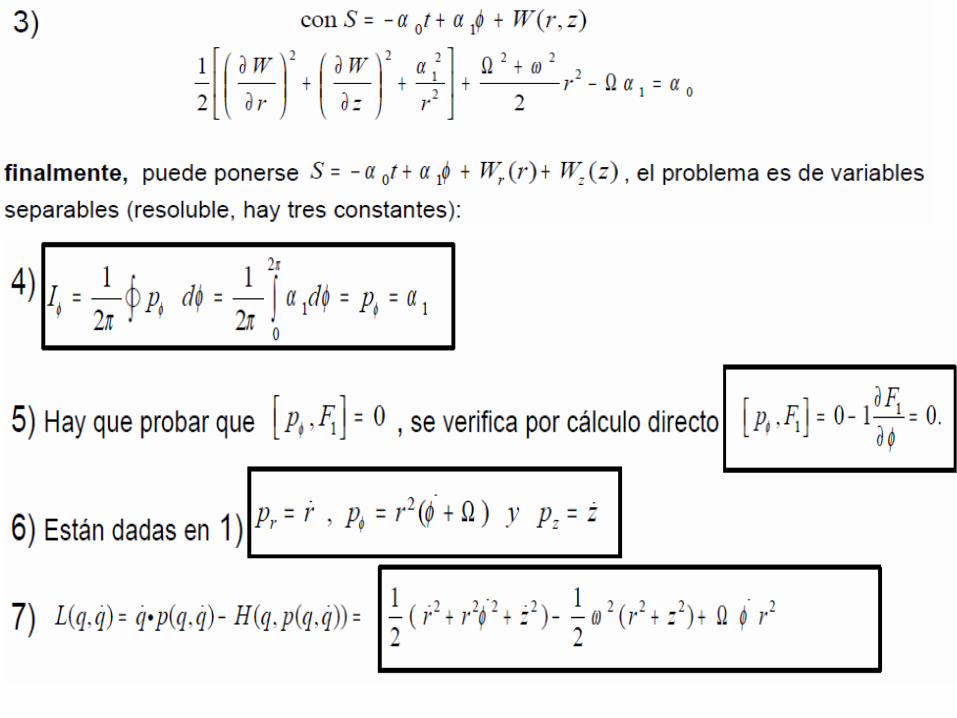
B.- (3 puntos , 1.5+1.5)Si se incorpora al sistema la ligadura (no holónoma) 2 1 1 2 , con 0,kq q q q k ≠− =
8) Nuevas ecuaciones de Lagrange del movimiento usando el método de losmultiplicadores de Lagrange ( notarlos como µ ).
9) Para la función E obtenida en 3), evaluar en este caso /E dE dt=& .

1)Aplicando la definición 1 1
1 1
2 22 2
d U UQ qdt q qd U UQ qdt q q
∂ ∂ = − = − ∂ ∂ ∂ ∂ = − = − ∂ ∂
&
&
2)Por la ecuaciones de Euler-Lagrange: 1 1
2 2
00j
j j
q qd T T Qq qdt q q
+ =∂ ∂− = → + =∂ ∂
&&&&&
Observar que el término 1 2 2 1( )q q q qα +& & es de la forma 1 2( )dF d q qdt dt
α=
3)De la definición: 2 2 2 21 2 1 2
1 1( , ) - = = ( ) + ( )2 2
LH q q q L E q q q qq
∂= + +∂
& & & &
4) Como 0, .H E ctet
∂ = =∂
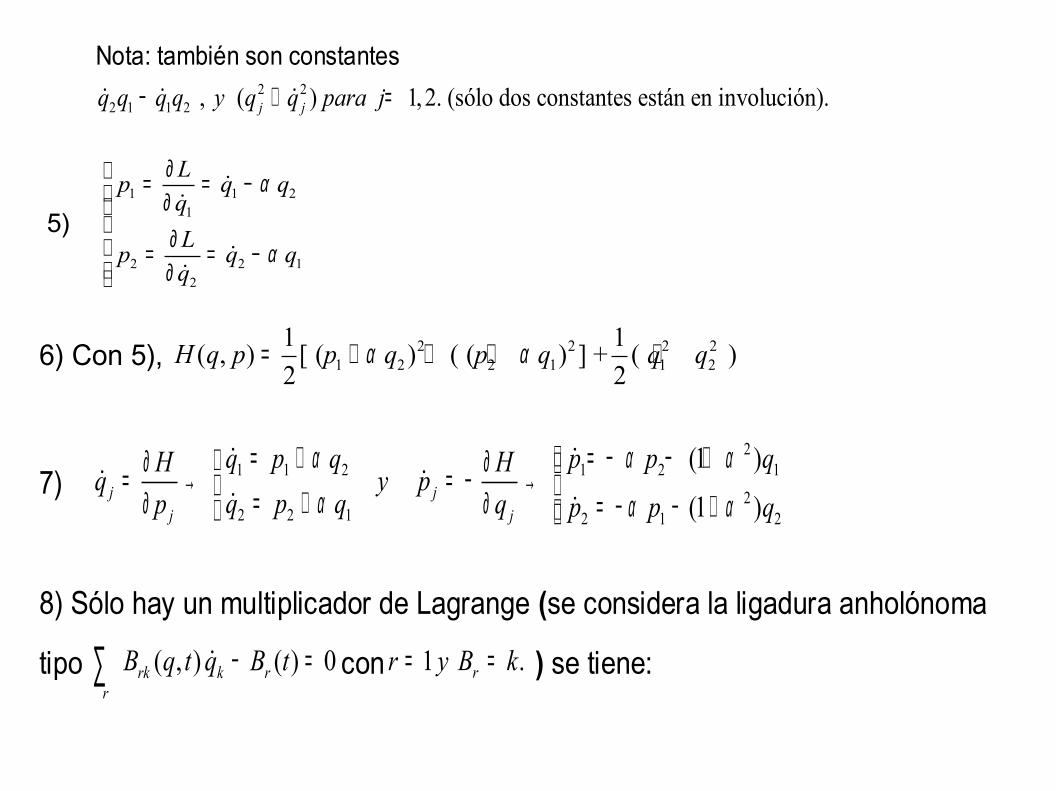
Nota: también son constantes2 2
2 1 1 2 , ( ) 1,2. (sólo dos constantes están en involución). j jq q q q y q q para j− + =& & &
5) 1 1 2
1
2 2 12
Lp q qqLp q qq
α
α
∂ = = − ∂ ∂ = = − ∂
&&
&&
6) Con 5), 2 2 2 21 2 2 1 1 2
1 1( , ) [ ( ) ( ( ) ] + ( )2 2
H q p p q p q q qα α= + + + +
7) 2
1 1 2 1 2 12
2 2 1 2 1 2
(1 )
(1 )j jj j
q p q p p qH Hq y pq p qp q p p q
α α αα α α
= + = − − +∂ ∂ = → = − → = +∂ ∂ = − − +
& && &
& &
8) Sólo hay un multiplicador de Lagrange (se considera la ligadura anholónoma
tipo ( , ) ( ) 0rk k rr
B q t q B t− =∑ & con 1 .rr y B k= = ) se tiene:

: 1 1 2
2 1 1 22 2 1
0j j j
q q qd L L junto con q q q q kq q qdt q q q
µφµ φµ
+ =∂ ∂ ∂− = → = − − = + = −∂ ∂ ∂
&&& &
&&& &
9) Con E de 1) y con las ecuaciones de 8):
1 1 2 2 1 1 2 2 2 1 2 1( )dE E Eq q q q q q q q q q q q q q k Edt q q
µ µ∂ ∂= ⋅ + ⋅ = + + + = − = =∂ ∂
&& && & & & && & && & &&
5
¿Puede resolverse el sistema de ecuaciones en los casos con y sin ligadura?

6
Ejercicio 2 (Una hora)El sistema lagrangiano correspondiente a una partícula puntual de masa m y carga q que se muevebajo la acción de su peso y de un campo magnético uniforme 0 ( )B B k m q k= = Ω
r rr , tiene por
Lagrangiana 2 2 2 2 21 1 ( )
2 2L m r r z m g z m rφ φ= + + − + Ω& && &
usando coordenadas cilíndricas como coordenadas generalizadas ( , , )q r zφ≡ . Se pide
A.- (6 puntos, 1.5 puntos cada apartado)
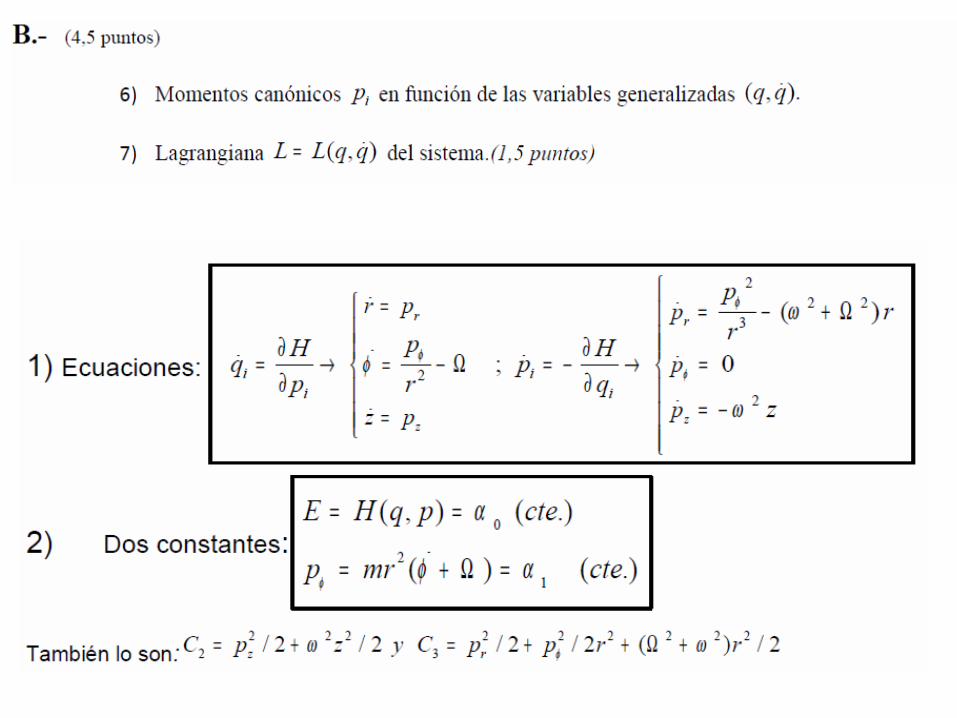
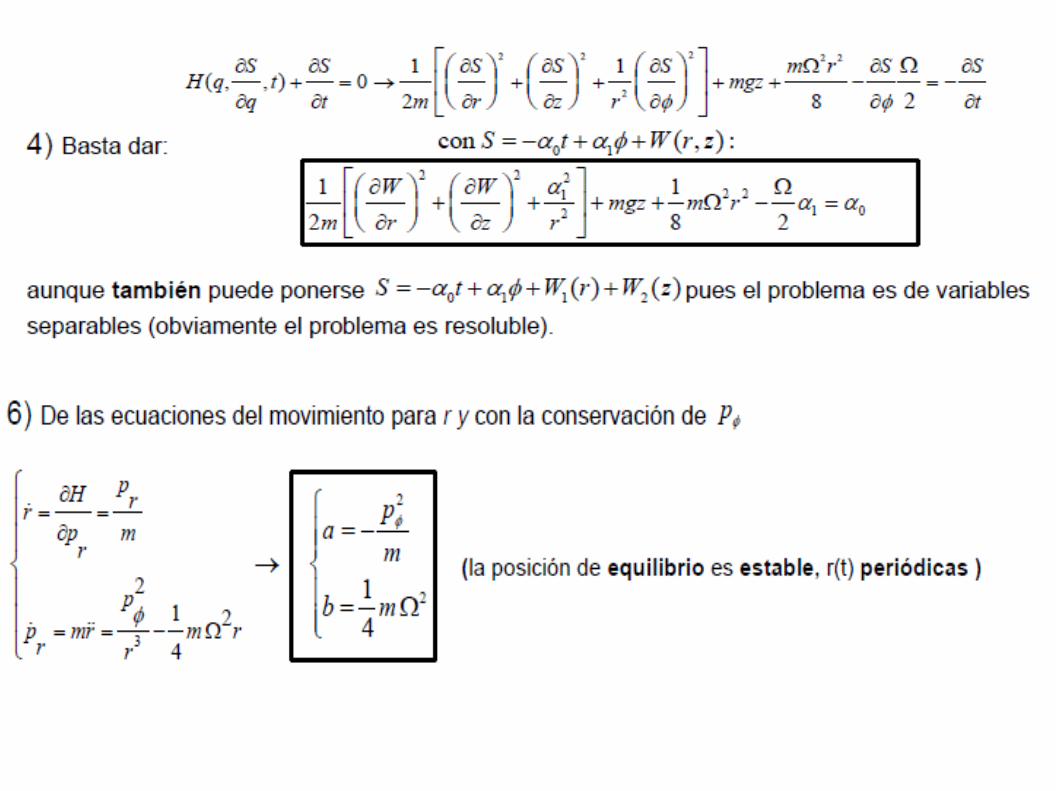
1) Momentos canónicos ,r zp p y pφ .2) Hamiltoniana del sistema ( , )H q p .3) Dos constantes del movimiento, dadas en función de las variables generalizadas ( , )q q& .4) Plantear la ecuación de Hamilton-Jacobi para la acción ( , , , )S r z tφ usando el método de separación
de variables (si es posible). B.- (4 puntos)
5) Probar que la la ecuación para la variable radial adopta la forma 3 0m r a r br+ + =&& yy dar el valor de a y b. (2 puntos)
6) Estudiar la estabilidad del punto de equilibrio de esta ecuación (trazar el diagrama defases aproximado)
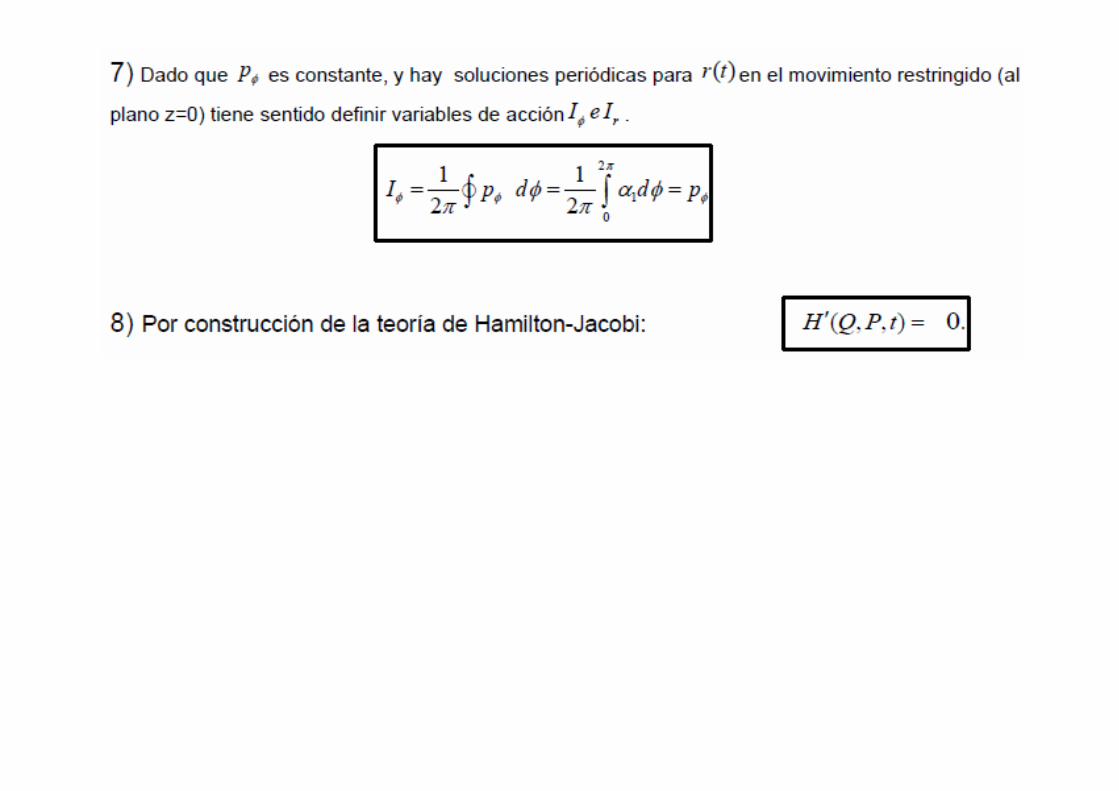
7) Variable de acción Iφ asociada a φ -si se impone la ligadura 0 ( 0)z z= =& -
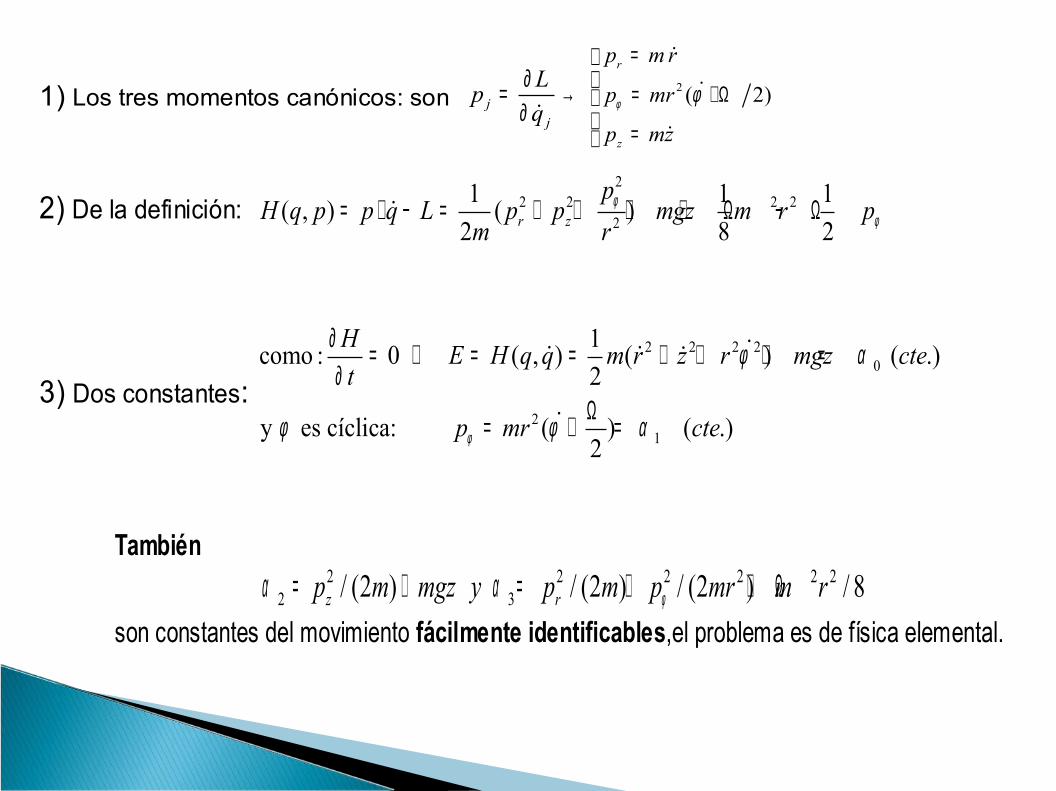
1) Los tres momentos canónicos: son 2 ( 2)r
z
jj
p m r
p mr
p mz
Lpq φ φ
=
= + Ω
=
∂ = → ∂
&&
&&
2) De la definición: 2
2 2 2 22
1 1 1( , ) ( )2 8 2r z
pH q p p q L p p mgz m r p
m rφ
φ= ⋅ − = + + + + Ω − Ω&
3) Dos constantes: 2 2 2 2
0
21
1como : 0 ( , ) ( ) ( .)2
y es cíclica: ( ) ( .)2
H E H q q m r z r mgz ctet
p mr cteφ
φ α
φ φ α
∂ = ⇒ = = + + + =∂
Ω= + =
&& & &
&
También 2 2 2 2 2 2
2 3/ (2 ) / (2 ) / (2 ) / 8z rp m mgz y p m p mr m rφα α= + = + + Ωson constantes del movimiento fácilmente identificables,el problema es de física elemental.

Ejemplos.Determinad la Hamiltoniana y las ecuaciones de Hamilton de lossiguientes sistemas:
a) Péndulo simple
b) Partícula relativista con Lagrangiana 2 2 21 / ( )L mc x c U x
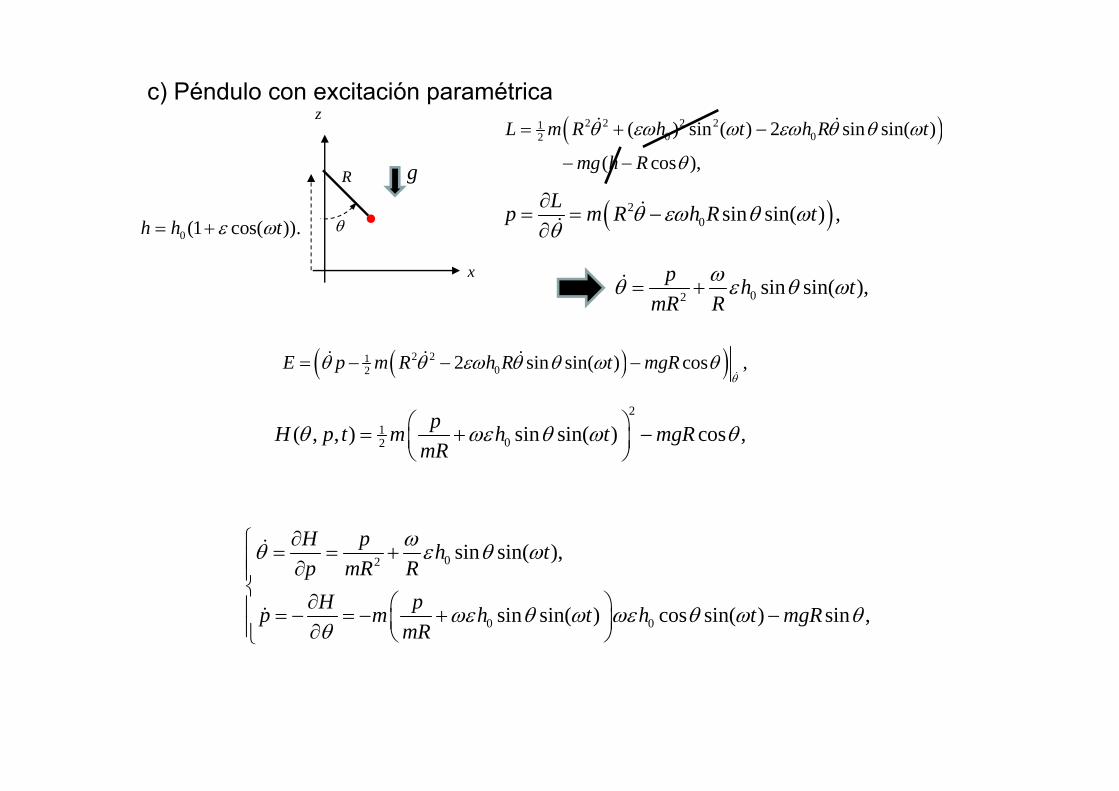
c) Péndulo con excitación paramétrica
x
z
M gR
x
z
0 (1 cos( )).h h t
R g
d) Péndulo simple contenido en un plano que rota alrededor del eje vertical con velocidad angular constante.
t
g R
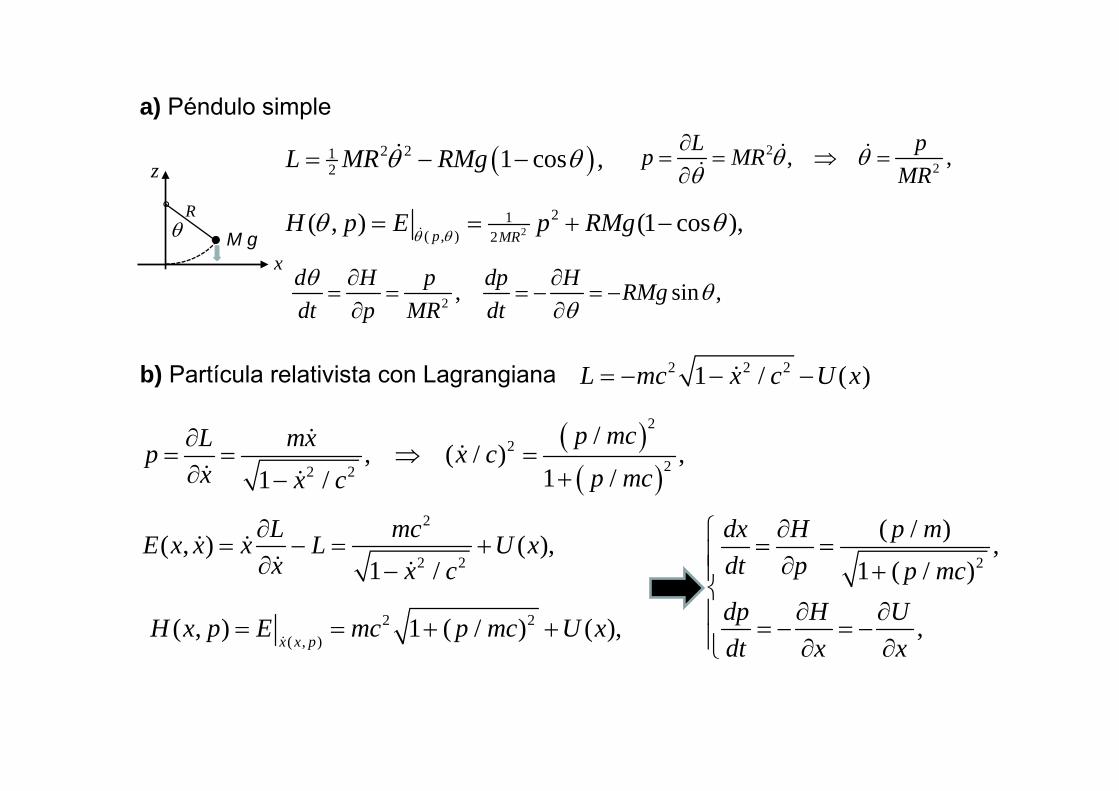
a) Péndulo simple
b) Partícula relativista con Lagrangiana 2 2 21 / ( )L mc x c U x
x
z
M gR
2 212 1 cos ,L MR RMg 2
2, ,L pp MRMR
221
( , ) 2( , ) (1 cos ),
p MRH p E p RMg
2 , sin ,d H p dp H RMgdt p MR dt
2
2 2( , ) ( ),
1 /L mcE x x x L U xx x c
22
22 2
/, ( / ) ,
1 /1 /
p mcL mxp x cx p mcx c
2 2( , )
( , ) 1 ( / ) ( ),x x p
H x p E mc p mc U x
2
( / ) ,1 ( / )
,
dx H p mdt p p mcdp H Udt x x
c) Péndulo con excitación paramétrica
x
z
0 (1 cos( )).h h t
R g
2 2 2 210 02 ( ) sin ( ) 2 sin sin( )
( cos ),
L m R h t h R t
mg h R
20 sin sin( ) ,Lp m R h R t
2 2102 2 sin sin( ) cos ,E p m R h R t mgR
02 sin sin( ),p h tmR R
21
02( , , ) sin sin( ) cos ,pH p t m h t mgRmR
02
0 0
sin sin( ),
sin sin( ) cos sin( ) sin ,
H p h tp mR R
H pp m h t h t mgRmR
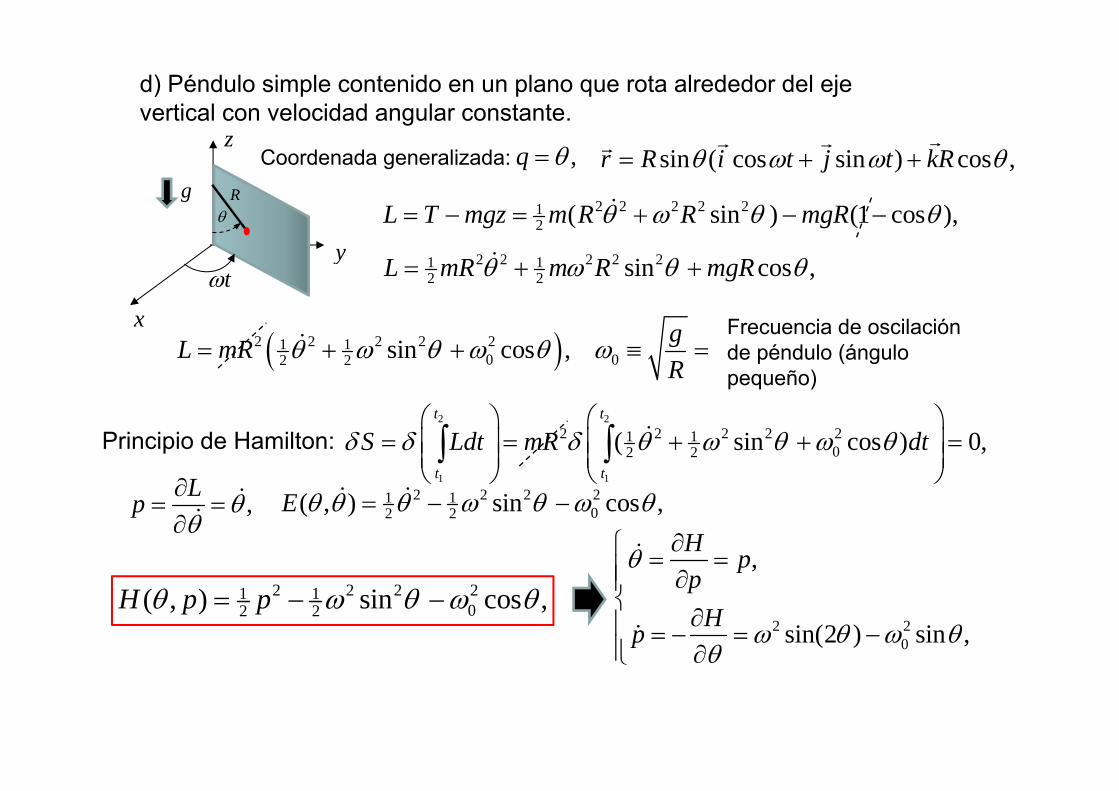
Coordenada generalizada:
d) Péndulo simple contenido en un plano que rota alrededor del eje vertical con velocidad angular constante.
t
g R
x
y
z,q sin ( cos sin ) cos ,r R i t j t kR
2 2 2 2 212 ( sin ) (1 cos ),L T mgz m R R mgR
2 2 2 2 21 12 2 sin cos ,L mR m R mgR
2 2 2 2 21 10 02 2 sin cos , gL mR
R Frecuencia de oscilación
de péndulo (ángulo pequeño)
Principio de Hamilton:2 2
1 1
2 2 2 2 21 102 2( sin cos ) 0,
t t
t t
S Ldt mR dt
,Lp
2 2 2 21 102 2( , ) sin cos ,E
2 2 2 21 102 2( , ) sin cos ,H p p
2 20
,
sin(2 ) sin ,
H pp
Hp

Êjercicio.Determinad la Lagrangiana de un sistema con Hamiltoniana:
2 2 21 12 2( , ) ,H q p p q p q
2 2, ,Hq p q p q qp
22 2 21 1
2 2( , ) ( ) ,p q q
L q q qp H q q q

Estudio del sistema Hamiltoniano
0 0 0 0
,
,
( ) , ( ) ,
dq Hdt pdp Hdt qq t q p t p
( , )H q p
( , ) .H q p const
Puntos de equilibrio (singulares o críticos):e
ee
qx
p
0, 0,e ex x
H Hp q
En los puntos de equilibrio: 0, 0,dq dpdt dt
( ) ,ee
e
qx t x t
p
( )( ) ,
( )q t
x tp t
0 11 0
HqdxHdtp
,J H
00 0
0
( ) ,q
x t xp

Estabilidad de un punto de equilibrio. Definición:
Un punto de equilibrio se dice que es estable si para todo existe un tal que para todo que verifique la solución , con condición inicial , satisface para todo la desigualdad
ex 0 ( ) 0 0x 0 ,ex x ( )x t 0x 0t t
( ) .ex t x
q
p
ex
0x ( )x t
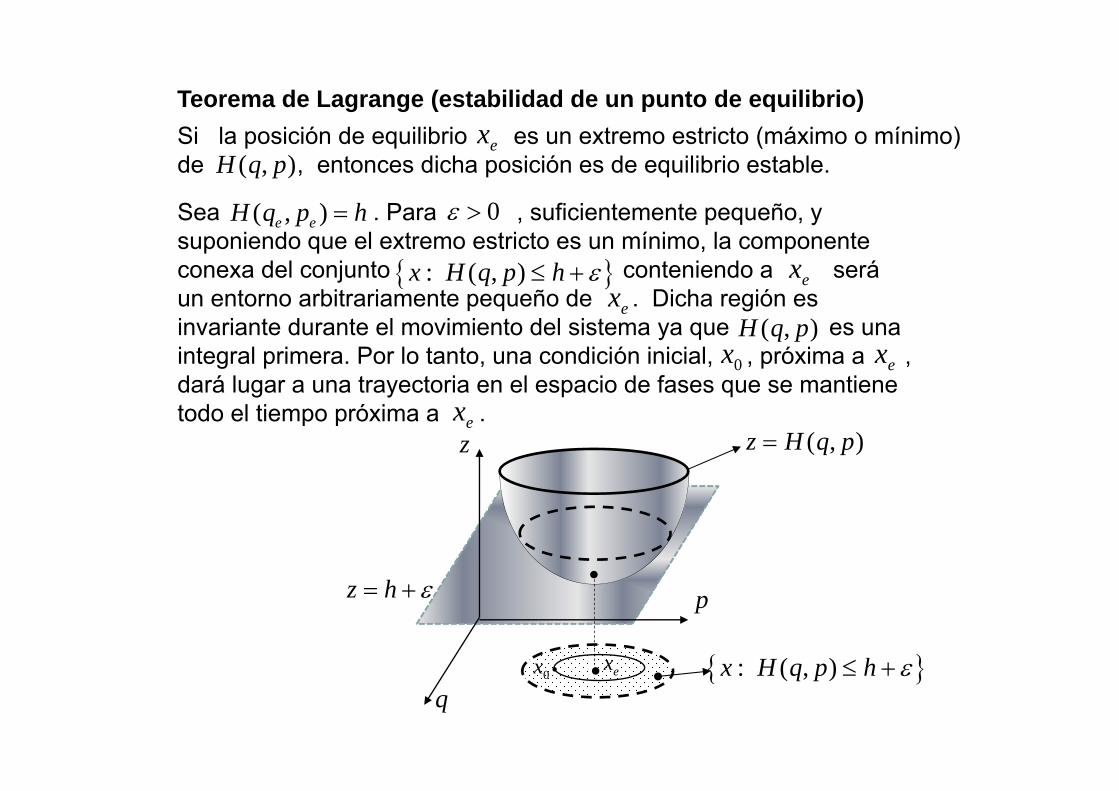
Teorema de Lagrange (estabilidad de un punto de equilibrio)Si la posición de equilibrio es un extremo estricto (máximo o mínimo) de , entonces dicha posición es de equilibrio estable.( , )H q p
ex
Sea . Para , suficientemente pequeño, y suponiendo que el extremo estricto es un mínimo, la componente conexa del conjunto conteniendo a será un entorno arbitrariamente pequeño de . Dicha región es invariante durante el movimiento del sistema ya que es una integral primera. Por lo tanto, una condición inicial, , próxima a , dará lugar a una trayectoria en el espacio de fases que se mantiene todo el tiempo próxima a .
0
( , )H q p0x
ex : ( , )x H q p h
( , )e eH q p h
ex
ex
ex
q
p
z
ex
( , )z H q p
z h
: ( , )x H q p h 0x

q
p
ex
0
Comportamiento del flujo de fase en el entorno de los puntos de equilibrio.
2 2 22 2
2 2
( , ) ( , )
1 ( , ) ( , ) ( , )( ) ( ) 2 ( )( )2
e e
e e e e e ee e e e
H q p H q p
H q p H q p H q pq q p p q q p pq p p q
2 2
2
2 2
2
( , ) ( , )1 ( ) ( ), ,2 ( , ) ( , )
e e e e
Te e e e
e e e e
H q p H q pq p q
x x A x x AH q p H q p
p q p
22 2 2
2 2
( , ) ( , ) ( , )det 0,e e e e e ee
H q p H q p H q pAp q p q
q
p
ex
0
CENTROPUERTO
.H const .H const
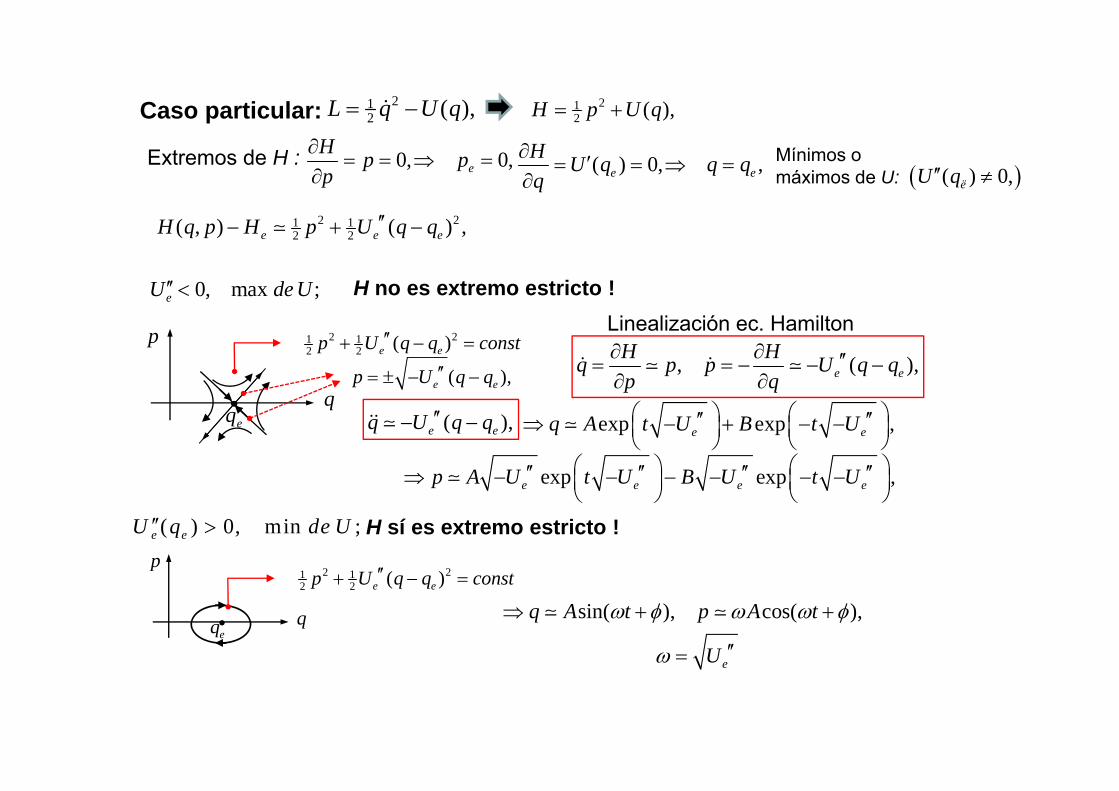
Caso particular: 212 ( ),L q U q 21
2 ( ),H p U q
Extremos de H : 0, 0,eH p pp
( ) 0, ,e eH U q q qq
Mínimos o máximos de U: ( ) 0,ëU q
2 21 12 2( , ) ( ) ,e e eH q p H p U q q
0, max ;eU de U H no es extremo estricto !
( ) 0, min ;e eU q de U H sí es extremo estricto !
q
p
eq
q
p
eq
2 21 12 2 ( )e ep U q q const
( ),e ep U q q
Linealización ec. Hamilton
, ( ),e eH Hq p p U q qp q
( ),e eq U q q exp exp ,e eq A t U B t U
exp exp ,e e e ep A U t U B U t U
2 21 12 2 ( )e ep U q q const
sin( ), cos( ),
e
q A t p A t
U
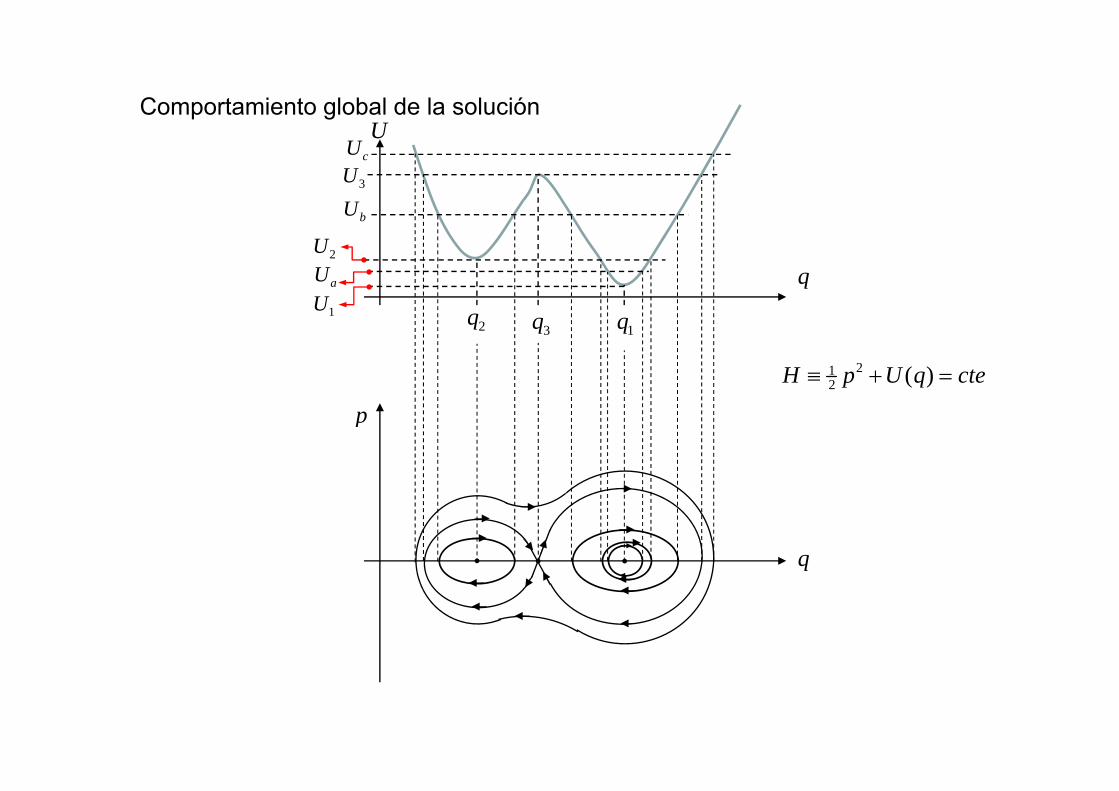
Comportamiento global de la solución
q
U
2q3q 1q
q
p
212 ( )H p U q cte
3U
2U
1UaU
cU
bU

Péndulo simple: Estudiad cualitativamente el entorno de los puntos de equilibrio.
x
z
M gR
2 210 02 cos , ,gL
R ,Lp
2 2102
20
cos ,
cos ,
H p
U
( , ) ( , 2 ), ,H p H p ,
2 20 0sin , cos ,U U 0, min ; , max ;de U de U
-2 p -p p 2 p
-1
120/U
-2 p -p 0 p 2 p
-2
-1
0
1
2
-2 p -p 0 p 2 p
-2
-1
0
1
2p
20
1H
20
1H
.H const

Péndulo simple contenido en un plano que rota alrededor del eje vertical con velocidad angular constante: estudiar la estabilidad de los puntos de equilibrio, flujo de fase, etc, en función del parámetro , siendo .
t
g R
0/ 0 /g R 2 2 2 2 21 1 1
02 2 2( , ) sin cos ( ),H p p p U 2 2 2 21
0 02 sin(2 ) sin , cos(2 ) cos ,U U 2
20 1 22
02 2 2 2
3 0 0
0, (1 cos )sin 0, , 0, ,
arccos( / ) ( ),
e e
e
U
2 2 2 2 2 2
1 0 0 0
42 2 20
2 3 04
( ) , (min); (max)
( ) 0, max , ( ) 1 0, (min)
e
e e
U inestable
U inestable U estable
-p - p2 pp
2
-1
120/U
0
0
3 / 4
1
3 / 2
2
0 0.5 1 1.5 2 2.50
p4
p2
e estable
0/

-p - p2
0 p2
p
-2
-1
0
1
2
-p - p2 0
p2 p
-2
-1
0
1
2
20/ .H const 0/ 0
-p - p2
0 p2
p
-2
-1
0
1
2
-p - p2 0
p2 p
-2
-1
0
1
2
0/ 1 / 2
-p - p2
0 p2
p
-2
-1
0
1
2
-p - p2 0
p2 p
-2
-1
0
1
2
0/ 1
-p - p2
0 p2
p
-2
-1
0
1
2
-p - p2 0
p2 p
-2
-1
0
1
2
0/ 2

Tipos de funciones generatriz:1 1 ,F Fpdq PdQ dq dQ
q Q
1 1( , ( , ), ,)F q Q F q Qp Pq Q
2 2( , ) ( , ), ,F q P F q Pp Qq P
3 3( , ) ( , ), ,F Q p F Q pq Pp Q
4 4( , ) ( , ), ,F p P F p Pq Qp P
,pdq PdQ dF
a) Tipo 1: 1( , ),F F q Q
( , ), ( , ),q Q P p Q P
b) Tipo 2: 2 ( , ) ,F F q P QP 2 2 ,F Fpdq PdQ dq dP QdP PdQq P
( , ), ( , ),q Q P p Q P
c) Tipo 3: 3( , ) ,F F Q p qp 3 3 ,F Fpdq PdQ dQ dp qdp pdqQ p
( , ), ( , ),q Q P p Q P
d) Tipo 4: 4 ( , ) ,F F p P qp QP 4 4 ,F Fpdq PdQ dp dP qdp pdq QdP PdQ
p P
( , ), ( , ),q Q P p Q P

para cierta función . Tª: Una transformación es canónica si y solo si los corchetes de
Poisson de las funciones verifican:,j jQ P
Sea un sistema con Hamiltoniana , y las correspondientes ecuaciones canónicas
( , , )H q p t
( , , )H Q P t
La transformación de variables se dice que es canónica si las ecuaciones del movimiento en las nuevas variables se pueden escribir de la forma
( , , ), ( , , ),j j j jQ Q q p t P P q p t
TRANSFORMACIONES CANÓNICAS:
, 0, , 0, , .j k j k j k jkQ Q P P Q P
, , 1, , .j jj j
H Hq p j np q
, , 1, , ,j jj j
H HQ P j nP Q
Cuando la transformación canónica es independiente del tiempo, la nueva Hamiltoniana es . ( , ) ( , )
( , , ) ( , , )q p Q P
H Q P t H q p t
El corchete de Poisson de dos funciones , de las variable
cánonicas y del tiempo, es independiente de las variables canónicas utilizadas: .
,u v
, .j jj j j j j j j j
u v u v u v u v u vq p p q Q P P Q

17
Función generatriz de una transformación canónica
.j j j jj j
p dq Hdt P dQ H dt dF
La aplicación del Principio de Hamilton ante una transformación canónica nos lleva a:
Un cálculo análogo al efectuado para un grado de libertad nos conduce a los siguientes cuatro tipos básicos de función generatriz:
1 1( , , ) ( , ), ,,j j
j j
F q Q t F q Q tp Pq Q
2 2( , , ) ( , , ), ,j jj j
F q P t F q P tp Qq P
3 3( , , ) ( , , ), ,j jj j
F Q p t F Q p tq Pp Q
4 4( , , ) ( , , ), ,j jj j
F p P t F p P tq Qp P
a) Tipo 1: 1( , , ),F F q Q t
b) Tipo 2:
c) Tipo 3: 3( , , ) ,j j
j
F F Q p t q p
d) Tipo 4: 4 ( , , ) ( ),j j j jj
F F p P t q p Q P
2 ( , , ) ,j jj
F F q P t Q P
( , ) ( , )
, 1,2,3,4.q p Q P
FH H
t