Proyecto Menorquín Yacht Estabilidad 264 9- ESTABILIDAD 9.1 ...
description
1
Power System Stability 1
Estabilidad en Sistemas
Eléctricos de Potencia
DIgSILENT GmbH
Definiciones Generales
2
• Definición General:
Capacidad del sistema de retornar a una condición de estadoestacionario luego de una perturbación
• Clasificación según el tipo de perturbación:• Estabilidad de pequeñas perturbaciones (small signal)
• Estabilidad de grandes perturbaciones (large signal, dinámica nolineal)
• Definición de acuerdo a CIGRE/IEEE:• Estabilidad angular (de pequeña y grande señal)
• Estabilidad de Tensión (de pequeña y grande señal)
• Estabilidad de Frecuencia
Definición de estabilidad
Estabilidad Angular (del rotor)
3
Capacidad de los generadores de mantenerse en sincronismoluego de una perturbación.
Para el análisis distinguimos entre:
• Estabilidad Oscilatoria (o angular de pequeñasperturbaciones)
-> depende del sistema
• Estabilidad transitoria (o angular de grandes perturbaciones)
-> depende del sistema y del tipo de perturbación
Estabilidad angular del rotor
Estabilidad transitoria
6
Estabilidad angular de grandes perturbaciones (Estabilidadtransitoria)
Capacidad del sistema de mantener sincronismo ante grandes
perturbaciones
– Tiempo crítico de despeje de falla
Estabilidad transitoria depende no solo del sistema sino tambiendel tipo de falla.
– Análisis mediante simulaciones en dominio del tiempo
Estabilidad transitoria
4
Annex: 1 /4
DIg
SIL
EN
T
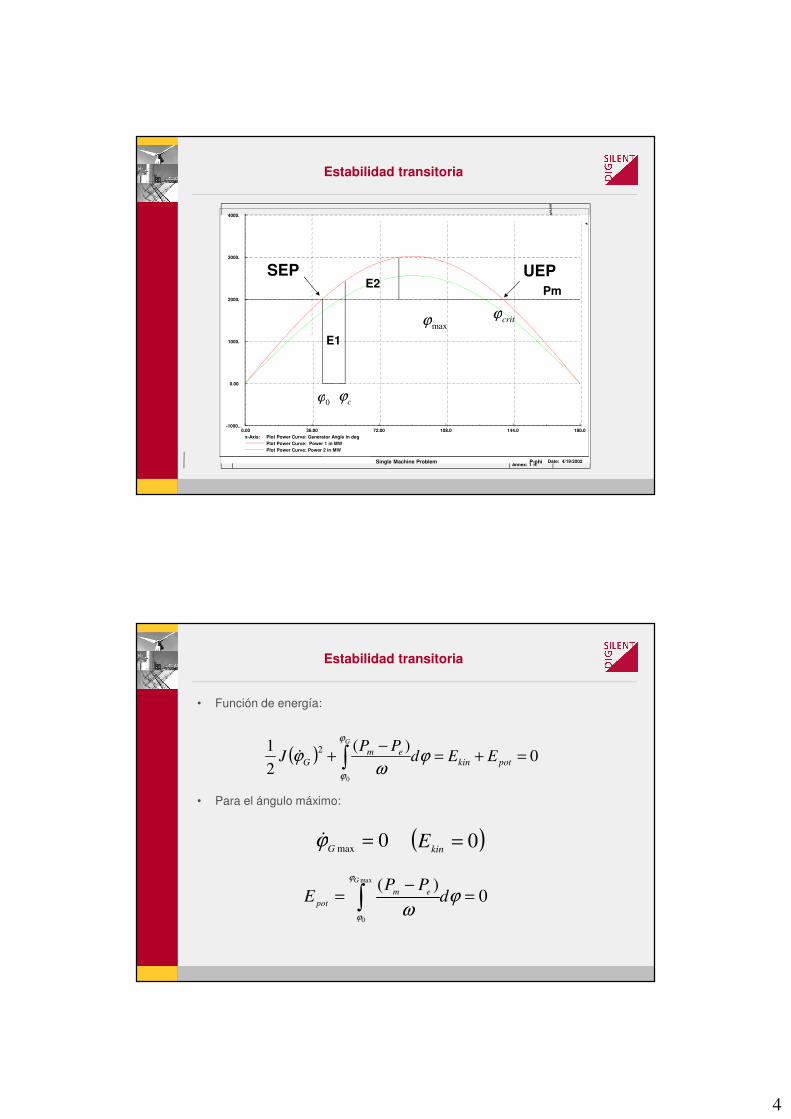
180.0144.0108.072.0036.000.00
4000.
3000.
2000.
1000.
0.00
-1000...
x-Axis: Plot Power Curve: Generator Angle in deg
Plot Power Curve: Power 1 in MW
Plot Power Curve: Power 2 in MW
Single Machine Problem P-phi Date: 4/19/2002
E1
E2
0ϕ cϕ
maxϕ
SEP UEP
critϕ
Pm
Estabilidad transitoria
• Función de energía:
• Para el ángulo máximo:
( ) 0)(
2
1
0
2=+=
−+ ∫ potkin
emG EEd
PPJ
G
ϕω
ϕϕ
ϕ
ɺ
0max
=G
ϕɺ
0)(
max
0
=−
= ∫ ϕω
ϕ
ϕ
dPP
EG
em
pot
( )0=kin
E
Estabilidad transitoria
5
Criterio de las áreas iguales
21 EE −=
∫=c
dPE m
ϕ
ϕ
ϕω
0
11
( )∫ −=max
)sin(1
max2
ϕ
ϕ
ϕϕω
c
dPPE m
Operación estable si:
Estabilidad transitoria
10
maxϕ
)(1
01 ϕϕω
−= cmPE
)cos(cos)( max
max
max2 ccm PP
E ϕϕω
ϕϕω
−+−=
000cossin)2(cos ϕϕϕπϕ −−=c
0ϕπϕ −=crit
Calculamos la máxima duración de la falla para que
el sea igual al
cϕ
es el ángulo crítico para el despeje de falla.cϕ
Criterio de áreas iguales
6
• Duración del cortocircuito:
• Ecuación diferencial:
• Tiempo crítico de despeje de falla:
0
2
02ϕ
ωϕ += c
mc t
J
P
0=eP
0ω
ϕ mG
PJ =ɺɺ
Tiempo crítico para el despeje de la falla
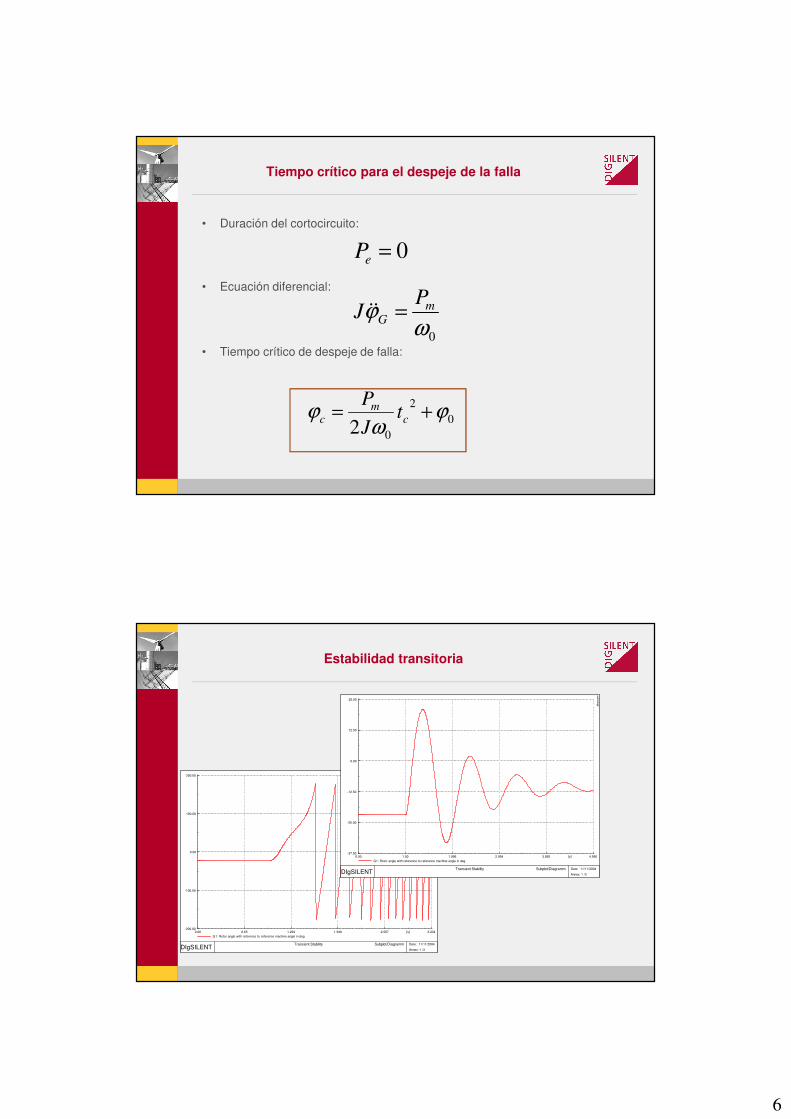
3.2342.5871.9401.2940.650.00 [s]
200.00
100.00
0.00
-100.00
-200.00
G1: Rotor angle with reference to reference machine angle in deg
DIgSILENT Transient Stability Subplot/Diagramm
Date: 11/11/2004
Annex: 1 /3
DIg
SIL
EN
T
4.9903.9922.9941.9961.000.00 [s]
25.00
12.50
0.00
-12.50
-25.00
-37.50
G1: Rotor angle with reference to reference machine angle in deg
DIgSILENT Transient Stability Subplot/Diagramm
Date: 11/11/2004
Annex: 1 /3
DIg
SIL
EN
T
Estabilidad transitoria
7
Fundamentals of Power System Stability 13
Estabilidad transitoria
Métodos típicos para mejorar la estabilidad transitoria:
• Reducción de la impedancia entre las máquinas (líneas adicionales,
compensación serie)
• Reducción del tiempo requerido para el despeje de fallas
• Apertura y recierre unipolar
• Fléxible AC transmission systems (FACTS)
• Conexiónes punto a punto de DC (HVDC links)
Herramientas para la Simulación
8
Fundamentals of Power System Stability 15
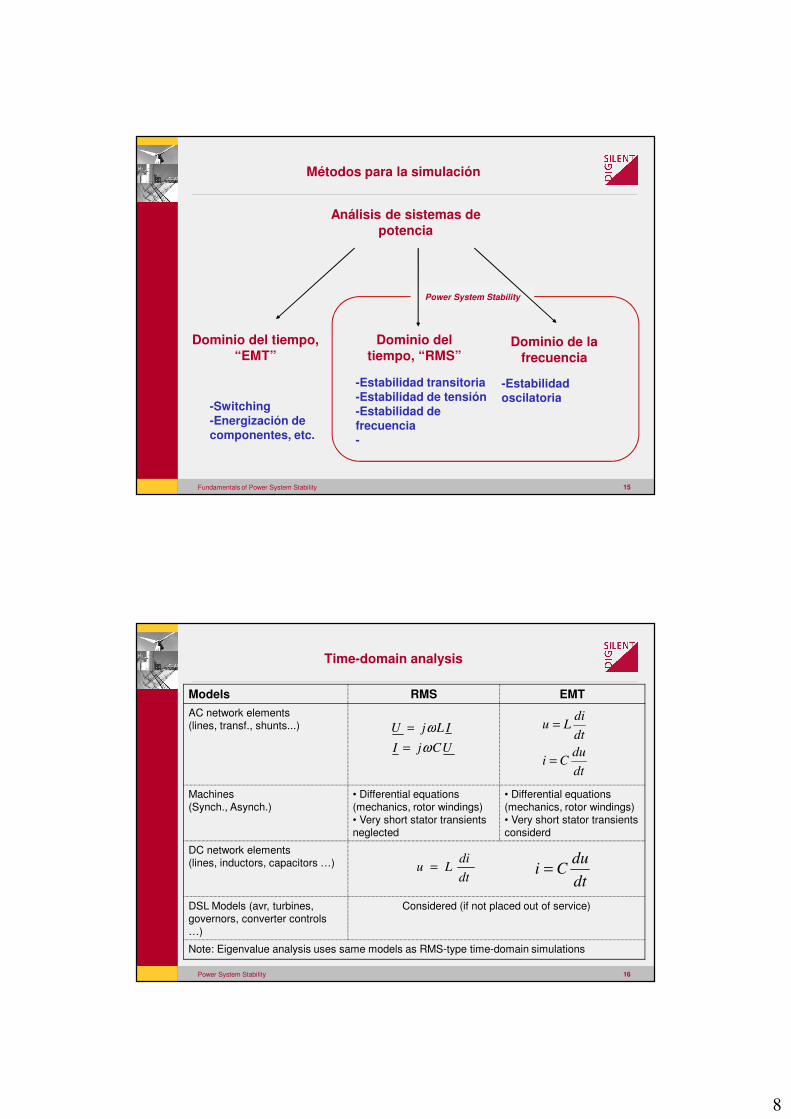
Dominio del tiempo, “RMS”
Dominio de la frecuencia
-Estabilidad transitoria-Estabilidad de tensión-Estabilidad de frecuencia-
-Estabilidadoscilatoria
Dominio del tiempo, “EMT”
-Switching-Energización de componentes, etc.
Análisis de sistemas de potencia
Power System Stability
Métodos para la simulación
Time-domain analysis
Power System Stability 16
Models RMS EMT
AC network elements(lines, transf., shunts...)
Machines(Synch., Asynch.)
• Differential equations (mechanics, rotor windings)• Very short stator transients neglected
• Differential equations (mechanics, rotor windings)• Very short stator transients considerd
DC network elements(lines, inductors, capacitors …)
DSL Models (avr, turbines, governors, converter controls …)
Considered (if not placed out of service)
Note: Eigenvalue analysis uses same models as RMS-type time-domain simulations
UCjI
ILjU
ω
ω
=
=
dt
duCi
dt
diLu
=
=
dt
diLu =
dt
duCi =

9
Fundamentals of Power System Stability 17
Time-domain analysis:Short-circuit current, EMT and RMS
300.0230.0160.090.0020.00-50.00 [ms]
80.00
40.00
0.00
-40.00
-80.00
-120.00
G1: Phase A current in kA/sqrt(2)
G1: Phase B current in kA/sqrt(2)
G1: Phase C current in kA/sqrt(2)
G1: Phase current in kA
DIg
SIL
EN
T
Fundamentals of Power System Stability 18
Time-domain analysis: Priority in simulation type
Phenomena RMS EMT
Large-signal rotor angle stability �
Small-signal rotor angle stability �
Dynamic voltage stability �
Frequency stability �
Dynamic motor starting �
Peak shaft torques during faults or machine starting �
HVDC dynamics � �
Inrush currents (transformers, motors) �
Subsynchronous resonance �
Switching over-voltages �
Ferro-resonance �
Controller tuning (AVR, PSS, Speed-control, Boiler controls…) �
Controller tuning (converter current controls, crowbar triggering…) �
10
Fundamentals of Power System Stability 19
Estabilidad Oscilatoria(del rotor)
Capacidad del SEP de mantener sincronismo ante pequeñasperturbaciones
– Amortiguamiento: oscilaciones amortiguadas?
– Torque sincronizante
Pequeñas perturbaciones:
– Aquellas que nos permiten linealizar el análisis alrededor del
punto de operación de la máquina.
La estabilidad angular de pequeña señal o estabilidad oscilatoriaes una propiedad del sistema (de su punto de operación) y noestá asociada a una falla específica
Estabilidad Oscilatoria

11
G~
Ge
ne
rato
r X
V ~
Infin
ite
bu
s
0E
, ,e eP Q I
'
GE
Problema de una máquina
Circuito equivalente para la deducción de la potencia
transmitida por el generador sobre la reactancia X:
Estabilidad angular de
22
Problema de una máquina
• Potencia transmitida
sobre una reactancia:
• Ecuaciones mecánicas:
0
m e m eP P P Pd
Jdt
ωω ω
− −⋅ = ≈
( )
( )( )GG
Ge
GG
e
EEX
EQ
X
EEP
ϕ
ϕ
cos
sin
0
'
'
'
0
−=
=
0 g
d
dtω ω ϕ= +
Deducción ecuación de movimiento de la máquina
12
Estabilidad angular de
23
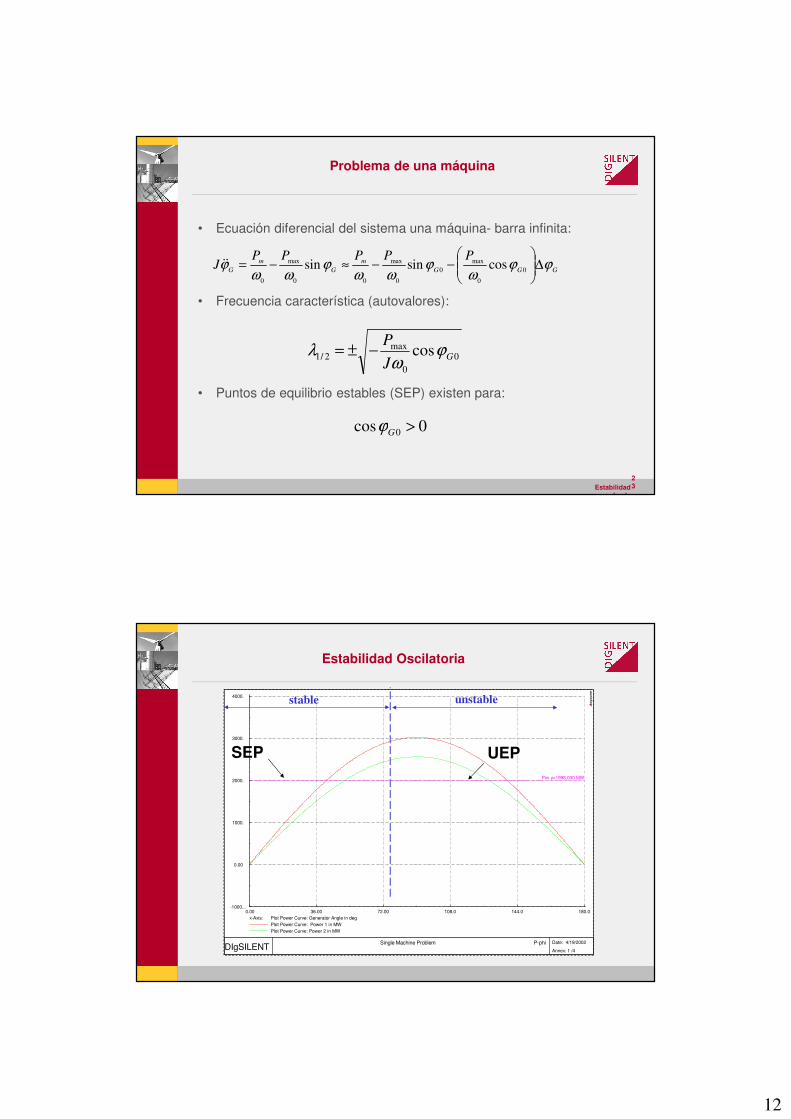
• Ecuación diferencial del sistema una máquina- barra infinita:
• Frecuencia característica (autovalores):
• Puntos de equilibrio estables (SEP) existen para:
GGG
m
G
m
G
PPPPPJ ϕϕ
ωϕ
ωωϕ
ωωϕ ∆
−−≈−=
0
0
max
0
0
max
00
max
0
cossinsinɺɺ
0
0
max2/1 cos G
J
Pϕ
ωλ −±=
0cos 0 >Gϕ
Problema de una máquina
180.0144.0108.072.0036.00 0.00
4000.
3000.
2000.
1000.
0.00
-1000...
x-Axis: Plot Power Curve: Generator Angle in deg
Plot Power Curve: Power 1 in MW
Plot Power Curve: Power 2 in MW
Pini y=1998.000 MW
DIgSILENT Single Machine Problem P-phi
Date: 4/19/2002
Annex: 1 /4
DIg
SIL
EN
T
SEP UEP
stable unstable
Estabilidad Oscilatoria
13
Fundamentals of Power System Stability 25
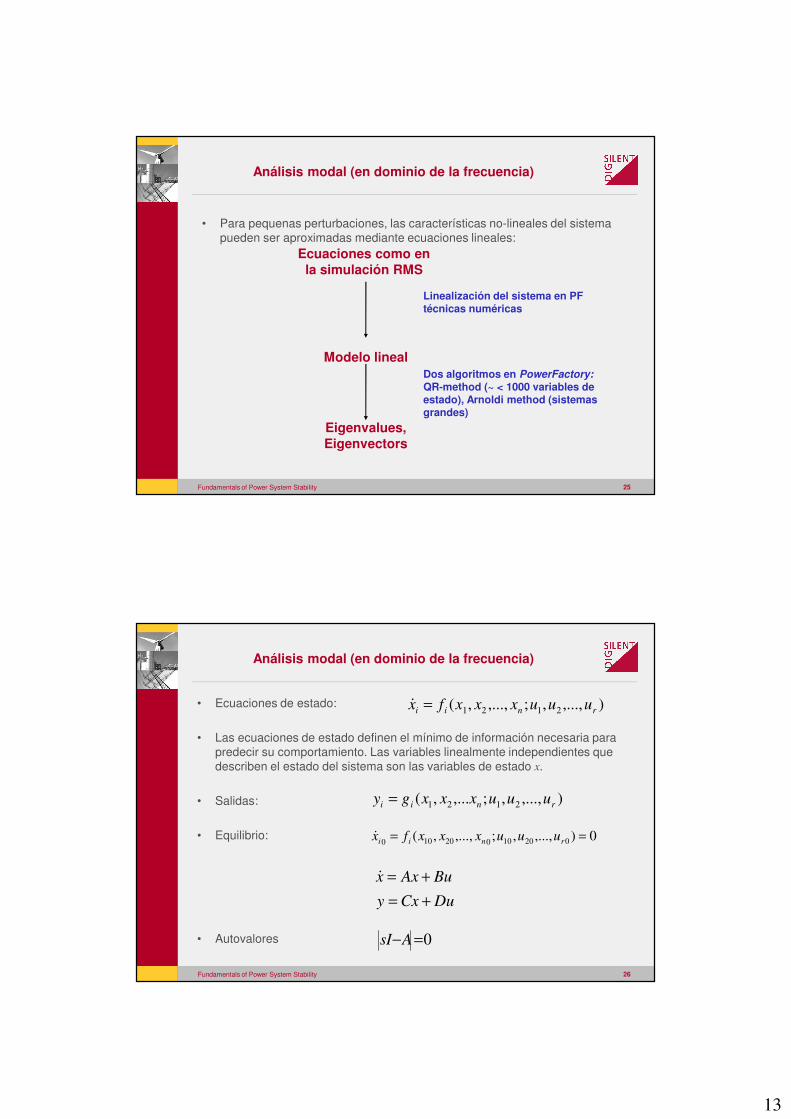
Análisis modal (en dominio de la frecuencia)
• Para pequenas perturbaciones, las características no-lineales del sistema
pueden ser aproximadas mediante ecuaciones lineales:
Ecuaciones como en la simulación RMS
Linealización del sistema en PF técnicas numéricas
Modelo lineal
Eigenvalues, Eigenvectors
Dos algoritmos en PowerFactory:QR-method (~ < 1000 variables de estado), Arnoldi method (sistemasgrandes)
Fundamentals of Power System Stability 26
• Ecuaciones de estado:
• Las ecuaciones de estado definen el mínimo de información necesaria para
predecir su comportamiento. Las variables linealmente independientes que
describen el estado del sistema son las variables de estado x.
• Salidas:
• Equilibrio:
• Autovalores
),...,,;,...,,( 2121 rnii uuuxxxfx =ɺ
),...,,;,...,( 2121 rnii uuuxxxgy =
0),...,,;,...,,( 02010020100== rnii uuuxxxfxɺ
Análisis modal (en dominio de la frecuencia)
DuCxy
BuAxx
+=
+=ɺ
0=−AsI
14
Fundamentals of Power System Stability 27
• Polos de [Dx(s)] y [Dy(s)] son la raíces de la ecuación característica de
la matriz [A]:
• Valores de s que satisfacen la ecuación son los autovalores de [A]
• Autovalores reales corresponden a modos no oscilatorios.
• Autovalores comlejos son modos de oscilación
• Parte real negativa indica modo amortiguado
0])[][det( =− AIs
Análisis modal (en dominio de la frecuencia)
Fundamentals of Power System Stability 28
• Un modo oscilatorio está dado por un par de polos complejos conjugados
• La parte real σ da el amortiguamiento. Una parte real negativa representa un
modo amortiguado (oscilación con amplitud decreciente)
• La parte imaginaria ω da la frecuencia de la oscilación en rad/s.
• El damping ratio ζ determina el amortiguamiento de la amplitud de la
oscilación:
ωσλ j±=
22 ωσ
σζ
+
−=
Análisis modal (en dominio de la frecuencia)

15
Fundamentals of Power System Stability 29
-0.8000-1.6000-2.4000-3.2000-4.0000 Neg. Damping [1/s]
3.5000
2.9000
2.3000
1.7000
1.1000
0.5000
Damped Frequency [Hz]
Stable EigenvaluesUnstable Eigenvalues
Y = 1.500 Hz
Y = 2.000 Hz
Y = 3.000 Hz
-0.8000-1.6000-2.4000-3.2000-4.0000 Neg. Damping [1/s]
3.5000
2.9000
2.3000
1.7000
1.1000
0.5000
Damped Frequency [Hz]
Stable EigenvaluesUnstable Eigenvalues
Y = 0.800 Hz
DIg
SIL
EN
T
Resultados del análisis de autovalores
Without PSS
With PSS
Dynamic Models 30
Power Plant / Controller Modelsin PowerFactory

16
Dynamic Models 31
Concept
Model Definition
Common Model 1
Common Model 2
Frame
Slot A
Slot B
Composite Model 1
Composite Model 2
Network Element 1
Network Element 2
LibraryNetwork Data
A
A
B
B
Fundamentals of Power System Stability 32
Estabilidad de tensión
17
Estabilidad de tensión se refiere a la capacidad de un SEP de mantener las tensiones en todas las barras del sistema en condiciones de operación normal luego de haber sido sujeto a una perturbación.
• Estabilidad de tensión de pequeñas perturbaciones (Estabilidad
de estado estacionario o „long term stablity“)
– Capacidad de mantener tensiones estacionarias luego de una
pequeña perturbación (variación de la carga, tap changer, etc.)
• Estabilidad de tensión de grandes perturbaciones (estabilidad
de tensión dinámica o „short term stability“)
– Capacidad de mantener tensiones estacionarias luego de una gran
perturbación (fallas, pérdida de generación, etc.)
Estabilidad de tensión
• Sistema estable
– Para toda barra del sistema se verifica que un incremento de Q =>
incremento de U, o bien
– dU/dQ (sensibilidades U-Q) positiva para todas las barras del
sistema.
• Sistema inestable
– Para alguna barra del sistema se verifica que un incremento de Q =>
disminución de U, o bien
– dU/dQ (sensibilidades U-Q) negativa para alguna barra del sistema.
Estabilidad de tensión
18
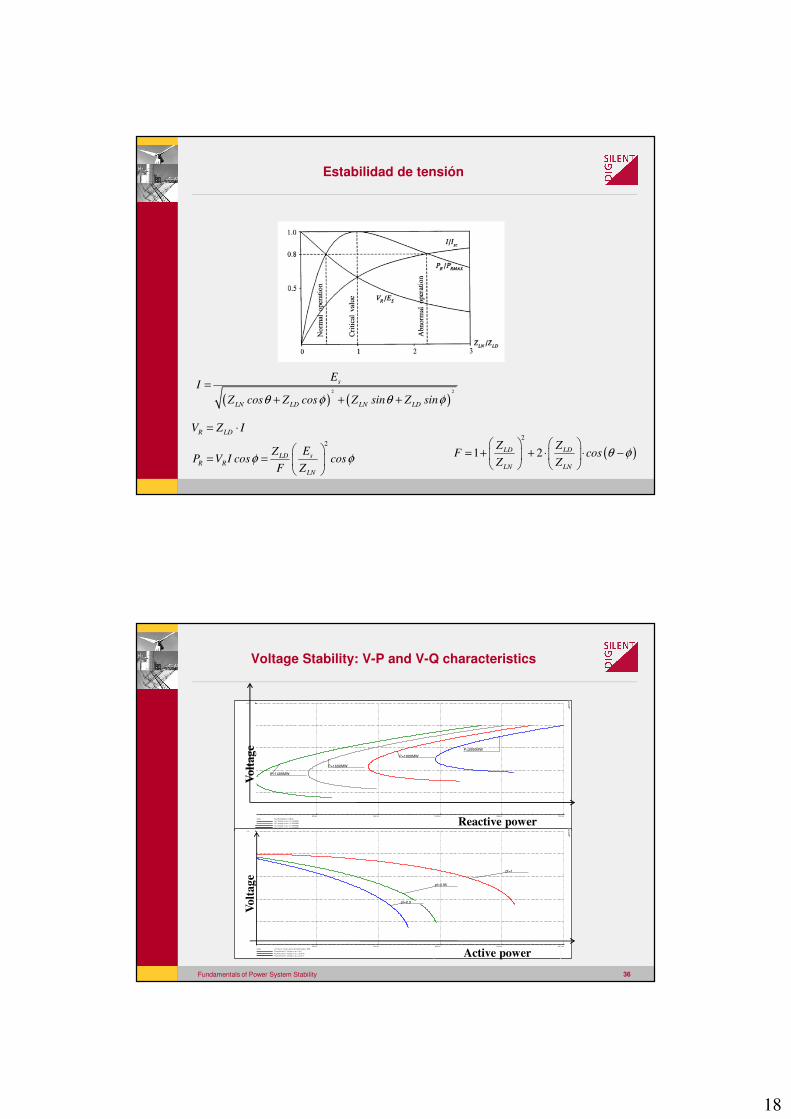
( ) ( )2 2
s
LN LD LN LD
EI
Z cos Z cos Z sin Z sinθ φ θ φ=
+ + +
( )2
1 2LD LD
LN LN
Z ZF cos
Z Zθ φ
= + + ⋅ ⋅ −
2
R LD
sLDR R
LN
V Z I
EZP V I cos cos
F Zφ φ
= ⋅
= =
Estabilidad de tensión
Fundamentals of Power System Stability 36
Voltage Stability: V-P and V-Q characteristics
1762.641462.641162.64862.64562.64262.64
1.40
1.20
1.00
0.80
0.60
0.40
x-Achse: SC: Blindleistung in Mvar
SC: Voltage in p.u., P=1400MW
SC: Voltage in p.u., P=1600MW
SC: Voltage in p.u., P=1800MW
SC: Voltage in p.u., P=2000MW
P=2000MW
P=1800MW
P=1600MW
P=1400MW
DIg
SIL
EN
T
1350.001100.00850.00600.00350.00100.00
1.00
0.90
0.80
0.70
0.60
0.50
x-Achse: U_P-Curve: Total Load of selected loads in MW
Klemmleiste(1): Voltage in p.u., pf=1
Klemmleiste(1): Voltage in p.u., pf=0.95
Klemmleiste(1): Voltage in p.u., pf=0.9
pf=1
pf=0.95
pf=0.9
DIg
SIL
EN
T
Volt
ag
e
Active power
Volt
ag
e
Reactive power
19
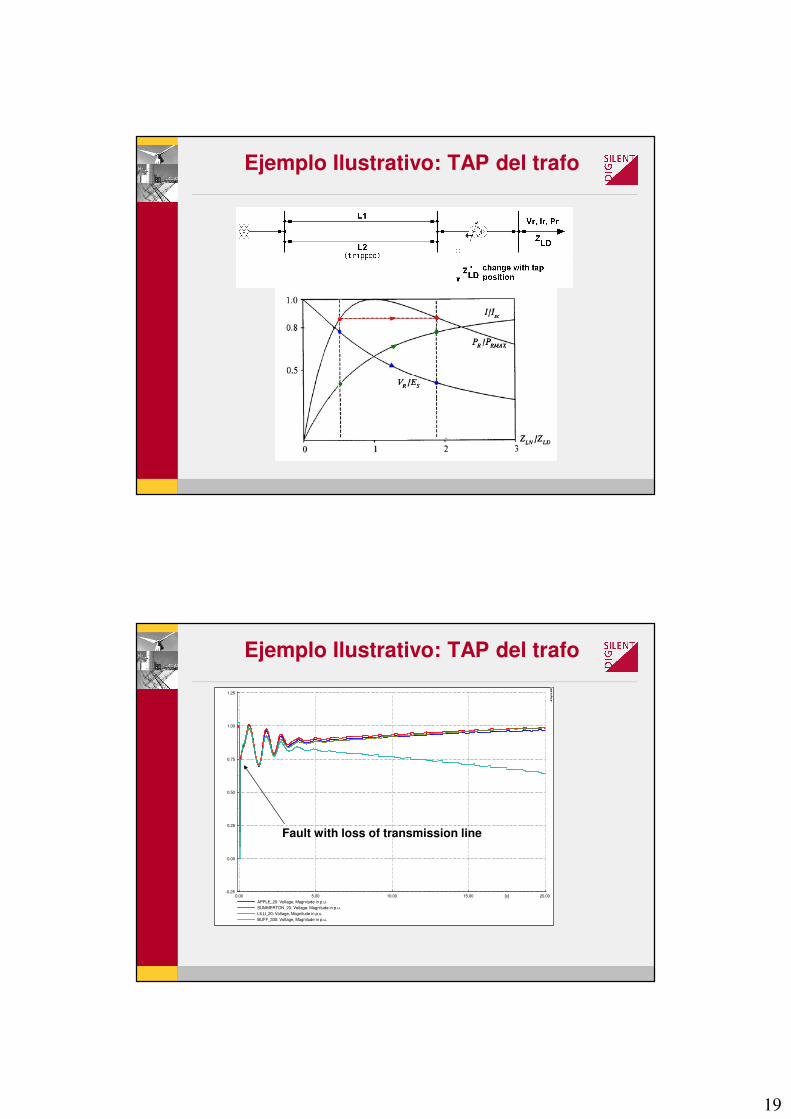
Ejemplo Ilustrativo: TAP del trafo
Ejemplo Ilustrativo: TAP del trafo
20.0015.0010.005.000.00 [s]
1.25
1.00
0.75
0.50
0.25
0.00
-0.25
APPLE_20: Voltage, Magnitude in p.u.
SUMMERTON_20: Voltage, Magnitude in p.u.
LILLI_20: Voltage, Magnitude in p.u.
BUFF_330: Voltage, Magnitude in p.u.
DIg
SIL
EN
T
Fault with loss of transmission line
20
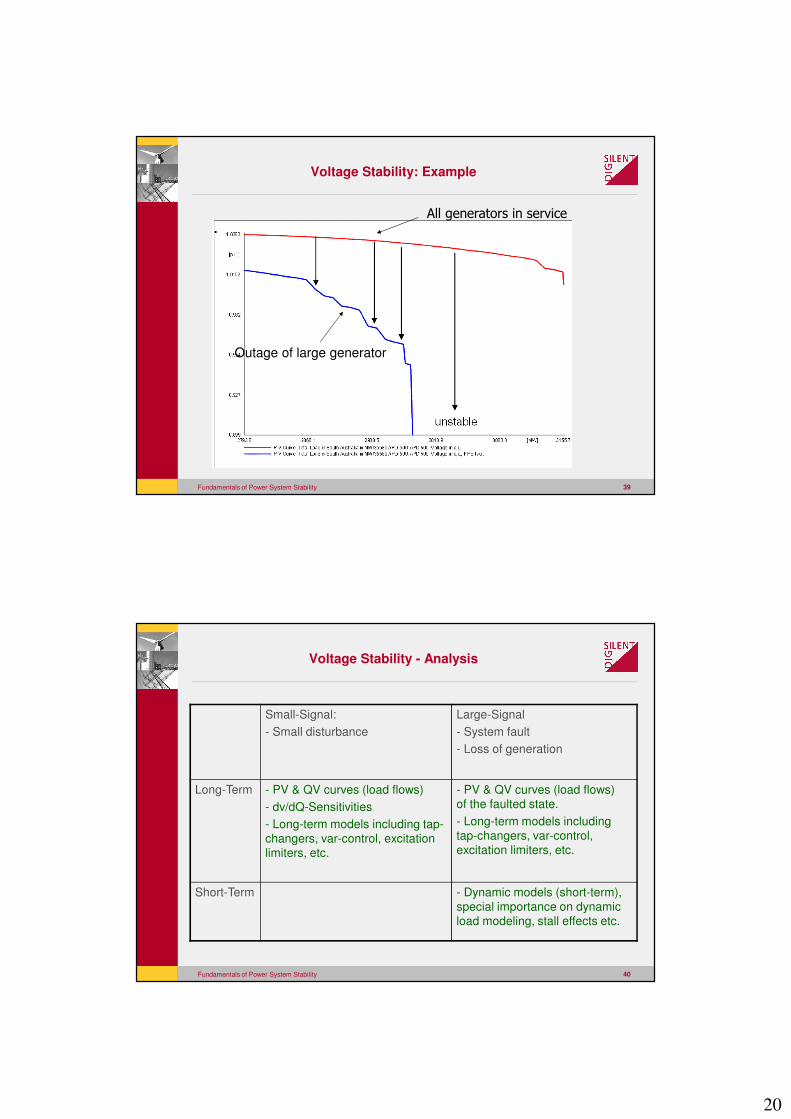
Fundamentals of Power System Stability 39
Voltage Stability: Example
Outage of large generator
All generators in service
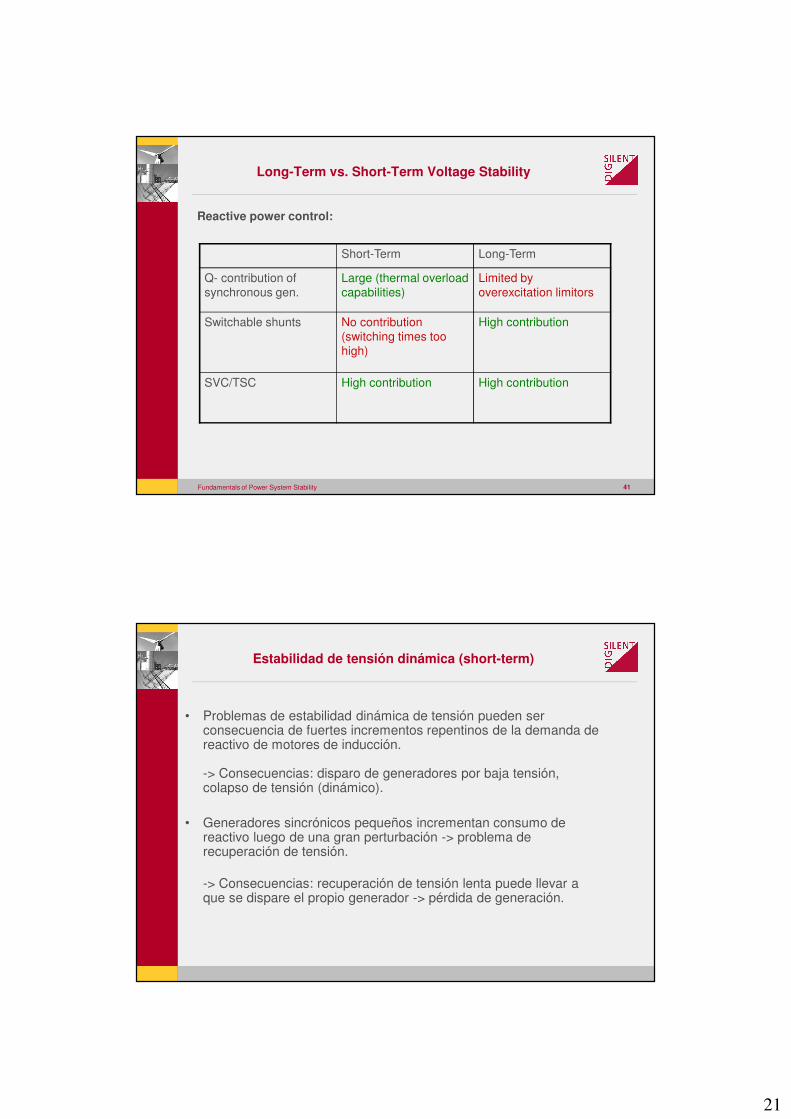
Fundamentals of Power System Stability 40
Small-Signal:
- Small disturbance
Large-Signal
- System fault
- Loss of generation
Long-Term - PV & QV curves (load flows)
- dv/dQ-Sensitivities
- Long-term models including tap-
changers, var-control, excitation
limiters, etc.
- PV & QV curves (load flows)
of the faulted state.
- Long-term models including
tap-changers, var-control,
excitation limiters, etc.
Short-Term - Dynamic models (short-term),
special importance on dynamic
load modeling, stall effects etc.
Voltage Stability - Analysis
21
Fundamentals of Power System Stability 41
Long-Term vs. Short-Term Voltage Stability
Reactive power control:
Short-Term Long-Term
Q- contribution of
synchronous gen.
Large (thermal overload
capabilities)
Limited by
overexcitation limitors
Switchable shunts No contribution
(switching times too
high)
High contribution
SVC/TSC High contribution High contribution
• Problemas de estabilidad dinámica de tensión pueden serconsecuencia de fuertes incrementos repentinos de la demanda de reactivo de motores de inducción.
-> Consecuencias: disparo de generadores por baja tensión, colapso de tensión (dinámico).
• Generadores sincrónicos pequeños incrementan consumo de reactivo luego de una gran perturbación -> problema de recuperación de tensión.
-> Consecuencias: recuperación de tensión lenta puede llevar a que se dispare el propio generador -> pérdida de generación.
Estabilidad de tensión dinámica (short-term)

22
2.001.501.000.500.00 [s]
1.20
1.00
0.80
0.60
0.40
0.20
0.00
G\HV: Voltage, Magnitude in p.u.
MV: Voltage, Magnitude in p.u.
2.001.501.000.500.00 [s]
80.00
40.00
0.00
-40.00
-80.00
-120.00
Cub_0.1\PQ PCC: Active Power in p.u.
Cub_0.1\PQ PCC: Reactive Power in p.u.
2.001.501.000.500.00 [s]
1.06
1.04
1.02
1.00
0.98
GWT: Speed
DIg
SIL
EN
T
Motor de inducción (comportamiento estable)
3.002.001.000.00 [s]
60.00
40.00
20.00
0.00
-20.00
-40.00
Cub_0.1\PQ RedSunset: Active Power in p.u.
Cub_0.1\PQ RedSunset: Reactive Power in p.u.
3.002.001.000.00 [s]
60.00
40.00
20.00
0.00
-20.00
-40.00
Cub_0.2\PQ BlueMountain: Active Power in p.u.
Cub_0.2\PQ BlueMountain: Reactive Power in p.u.
3.002.001.000.00 [s]
60.00
40.00
20.00
0.00
-20.00
-40.00
-60.00
Cub_1.1\PQ GreenField: Active Power in p.u.
Cub_1.1\PQ GreenField: Reactive Power in p.u.
3.002.001.000.00 [s]
1.125
1.000
0.875
0.750
0.625
0.500
0.375
GLE\1: Voltage, Magnitude in p.u.
GLZ\2: Voltage, Magnitude in p.u.
WDH\1: Voltage, Magnitude in p.u.
DIg
SIL
EN
T
Motor de inducción (comportamiento inestable)

23
Fundamentals of Power System Stability 45
3.002.001.000.00 [s]
1.20
1.00
0.80
0.60
0.40
0.20
0.00
HV: Voltage, Magnitude in p.u.
MV: Voltage, Magnitude in p.u.
3.002.001.000.00 [s]
120.00
80.00
40.00
0.00
-40.00
-80.00
-120.00
Cub_1\PCC PQ: Active Power in p.u.
Cub_1\PCC PQ: Reactive Power in p.u.
DIg
SIL
EN
T
Dynamic Voltage Stability –Voltage Recovery (Synchronous Generators)
Fundamentals of Power System Stability 46
Estabilidad de frecuencia
24
Estabilidad de frecuencia
Capacidad de un SEP para compensar un déficit de potencia
• Reserva masas rotantes (inercia, ctte. de tiempo de la red)
• La potencia perdida es compensada con la energía almacenada en la
masa rotante de los generadores -> Caída de la frecuencia.
• Actuación inmediata.
• Reserva primaria:
• La potencia perdida es compensada con un incremento de la generación
de las unidades con regulación primaria -> Caída de frecuencia
parcialmente compensada.
• Actuación desde algunos segundos hasta los primeros minutos
• Reserva secundaria:
• La potencia perdida es compensada con un incremento de la generación
de las unidades con regulación secundaria. Frecuencia e intercambio de
potencia entre áreas reestablecido.
• Actuación luego de varios minutos
Power System Stability 47
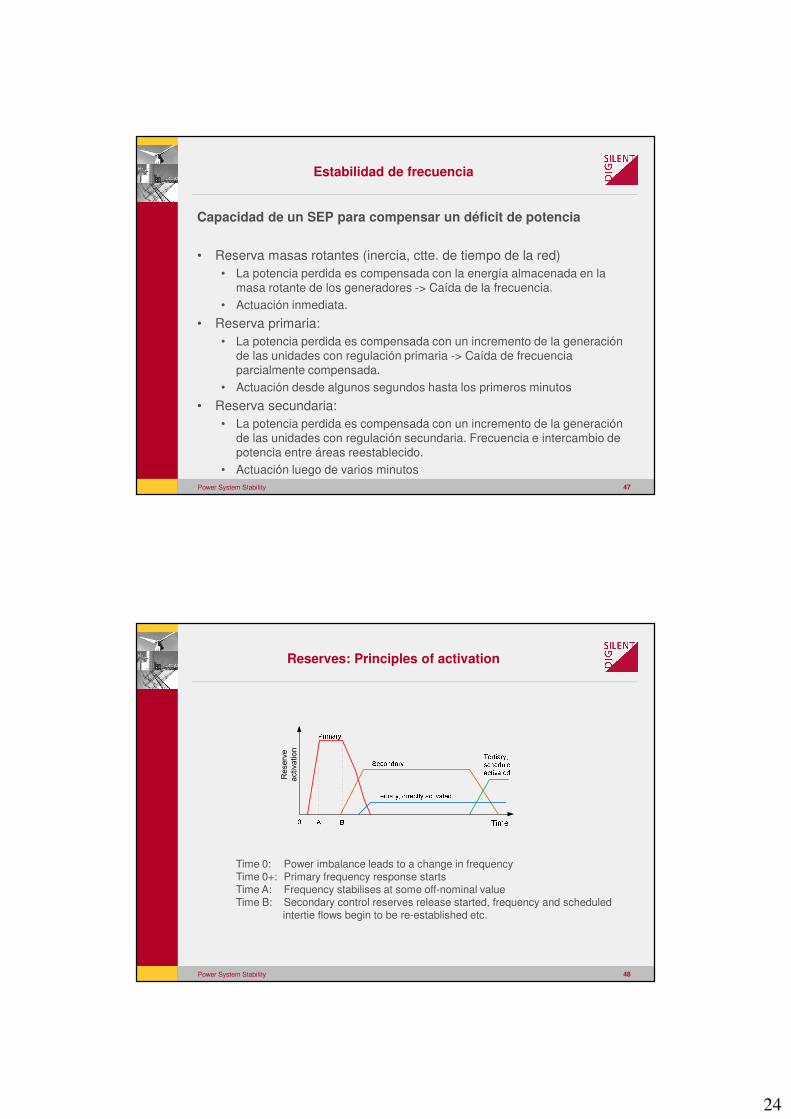
Reserves: Principles of activation
Power System Stability 48
Re
serv
e
activa
tio
n
Time 0: Power imbalance leads to a change in frequencyTime 0+: Primary frequency response startsTime A: Frequency stabilises at some off-nominal valueTime B: Secondary control reserves release started, frequency and scheduled
intertie flows begin to be re-established etc.

25
� Ecuación mecánica de cada generador:
� ∆∆∆∆P=ω∆ω∆ω∆ω∆T es la potencia provista al SEP por cada generador.
� Suponiendo sincronismo:
� Potencia es repartida de acuerdo a la inercia del generador
nn
elmelm
PPPTTJ
ωωω
∆=
−≈−=ɺ
j
i
j
i
ini
J
J
P
P
PJ
=∆
∆
∆=ωω ɺ
Reserva rotante (incercia)
� Estatismo de los reguladores de velocidad:
� Desviación de frecuencia total:
� Varios generadores, igual variación de frecuencia
� Potencia repartida proporcional al estatismo (Ki) o inversamente proporcional a Ri (ajuste caída de frecuencia).
� Regulador tipo: Proporcional + Delay.
( )∑
∑∆
=∆⇒∆=∆i
totitot
K
PffKP
i
j
j
i
jjii
R
R
P
P
PRPR
=∆
∆
∆=∆
PRPK
ffKP ii
i
ii ∆=∆=∆⇒∆=∆1
Regulación primaria
26
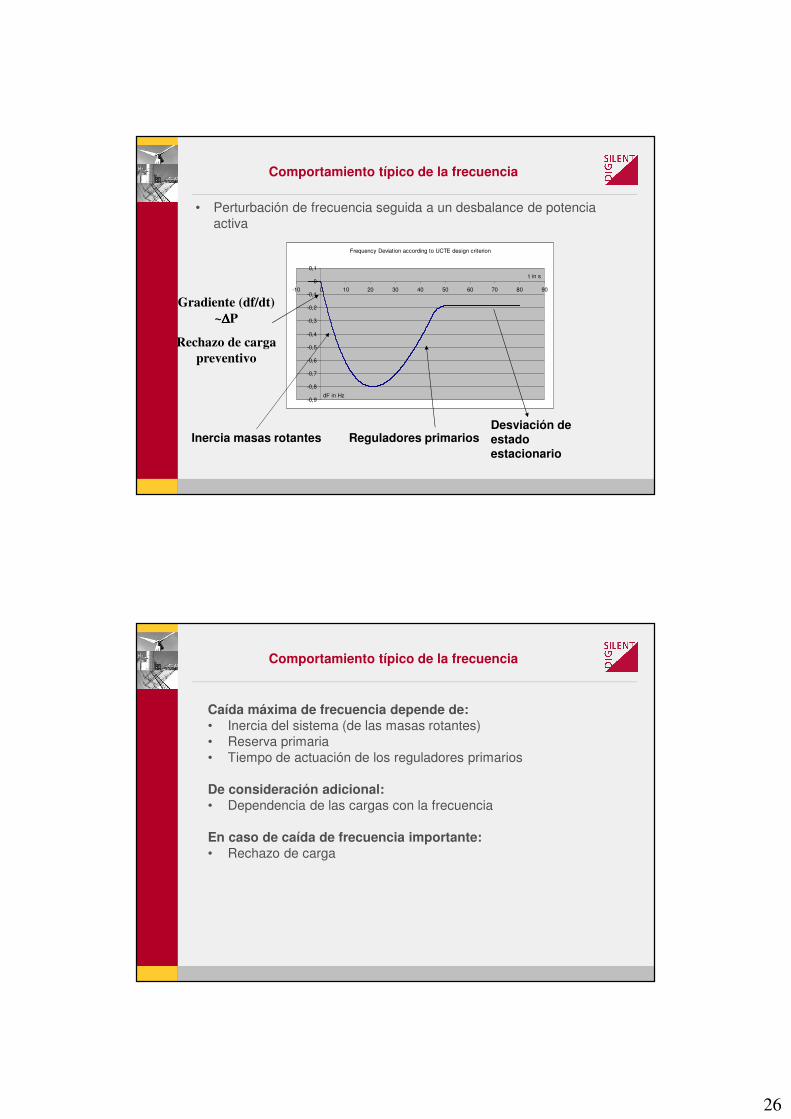
• Perturbación de frecuencia seguida a un desbalance de potencia
activa
Frequency Deviation according to UCTE design criterion
-0,9
-0,8
-0,7
-0,6
-0,5
-0,4
-0,3
-0,2
-0,1
0
0,1
-10 0 10 20 30 40 50 60 70 80 90
dF in Hz
t in s
Inercia masas rotantes Reguladores primariosDesviación de estado estacionario
Gradiente (df/dt)
~∆∆∆∆P
Rechazo de carga
preventivo
Comportamiento típico de la frecuencia
Caída máxima de frecuencia depende de:• Inercia del sistema (de las masas rotantes)
• Reserva primaria
• Tiempo de actuación de los reguladores primarios
De consideración adicional:• Dependencia de las cargas con la frecuencia
En caso de caída de frecuencia importante:• Rechazo de carga
Comportamiento típico de la frecuencia
27
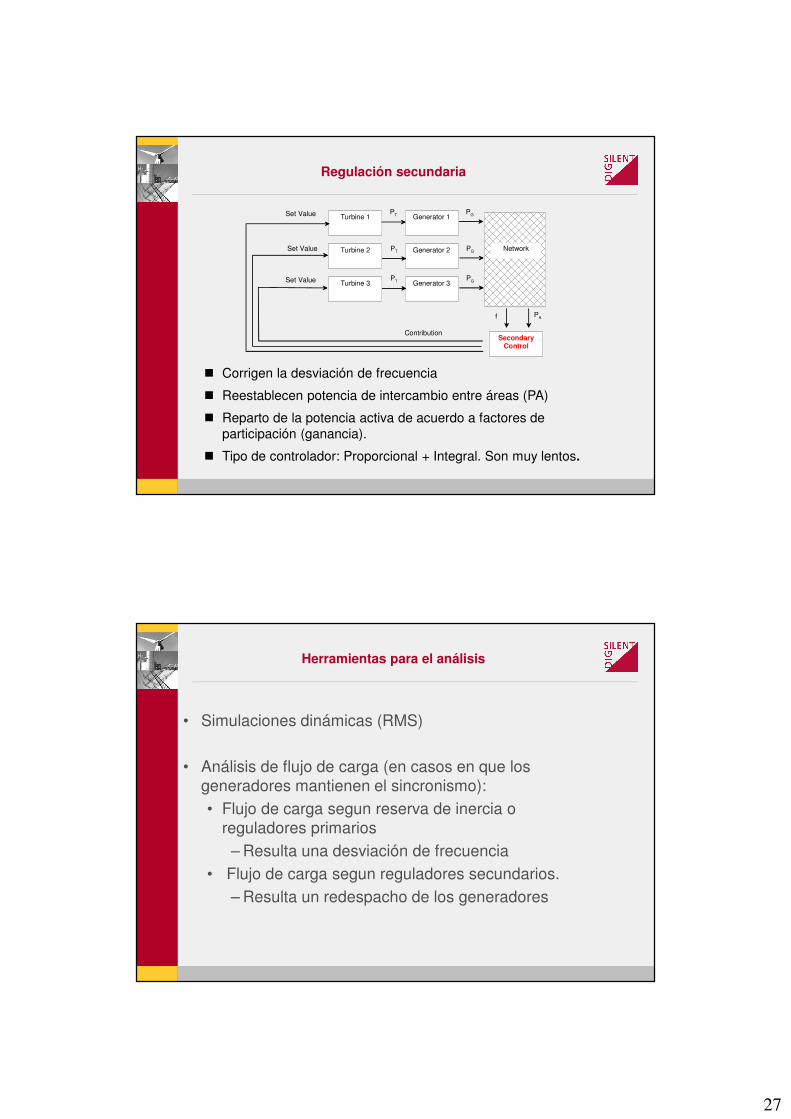
Turbine 1
Turbine 2
Turbine 3
Generator 1
Generator 2
Generator 3
Network
Secondary Control
PT PG
PT PG
PT PG
f PA
Set Value
Set Value
Set Value
Contribution
� Corrigen la desviación de frecuencia
� Reestablecen potencia de intercambio entre áreas (PA)
� Reparto de la potencia activa de acuerdo a factores de
participación (ganancia).
� Tipo de controlador: Proporcional + Integral. Son muy lentos.
Regulación secundaria
• Simulaciones dinámicas (RMS)
• Análisis de flujo de carga (en casos en que los
generadores mantienen el sincronismo):
• Flujo de carga segun reserva de inercia o
reguladores primarios
– Resulta una desviación de frecuencia
• Flujo de carga segun reguladores secundarios.
– Resulta un redespacho de los generadores
Herramientas para el análisis