2002 Hay LSE Full

of 20
Transcript of 2002 Hay LSE Full
-
8/9/2019 2002 Hay LSE Full
1/20
Landscape Ecology 16: 471–490, 2001.© 2001 Kluwer Academic Publishers. Printed in the Netherlands.
471
Research Article
A multiscale framework for landscape analysis: Object-specic analysisand upscaling
G.J. Hay 1,∗, D.J. Marceau 1 , P. Dub é1 and A. Bouchard 21Geocomputing Laboratory, D´ epartment de g´ eographie, Universit´ e de Montr´ eal, C.P. 6128, succursaleCentre-Ville, Montr´ eal, Qu´ e, Canada, H3C 3J7; 2 IRBV, Universit´ e de Montr´ eal, Jardin Botanique de Montr´ eal,4101 Sherbrooke Est, Montr´ eal, Qu´ e, Canada. H1X2B2; ∗ Author for correspondence (Tel: (514) 343-8073; Fax:(514) 343-8008; E-mail: [email protected])
Received 15 October 1999; Revised 10 April 2001; Accepted 5 April 2001
Key words: domains of scale, image-objects, landscape thresholds, MAUP, multiscale, object-specic analysis,OSA, OSU, remote sensing, scale, upscaling
Abstract
Landscapes are complex systems that require a multiscale approach to fully understand, manage, and predicttheir behavior. Remote sensing technologies represent the primary data source for landscape analysis, but sufferfrom the modiable areal unit problem (MAUP). To reduce the effects of MAUP when using remote sensing datafor multiscale analysis we present a novel analytical and upscaling framework based on the spatial inuence of the dominant objects composing a scene. By considering landscapes as hierarchical in nature, we theorize howa multiscale extension of this object-specic framework may assist in automatically dening critical landscapethresholds, domains of scale, ecotone boundaries, and the grain and extent at which scale-dependent ecologicalmodels could be developed and applied through scale.
Introduction
To better understand, manage, and predict the be-havior of the complex systems that provide life onearth, we require an improved understanding of thescale-specic interactions responsible for landscapemetabolism (Levin 1992), robust techniques for vi-sualizing and deciphering multiscale processes frompatterns (Turner et al. 1991), and appropriate scalingstrategies for linking and modelling data at multi-ple scales (King 1990; Ehleringer and Field 1993).To assist landscape ecologists in these tasks modernremote sensing technologies provide multi-resolutiondata sources for analysis and hypothesis testing overboth large and small areas, and hierarchy theory pro-vides a useful analytical framework for describing thelandscape’s composition within these scenes.
According to hierarchy theory, ecological sys-tems are considered as ‘nearly decomposable’ hier-archically organized entities resulting from (different)
structuring processes exerting their inuence over de-ned ranges or domains of scale (Allen and Starr1982; O’Neill et al. 1986; Holling 1992). Concep-tually, the decomposability of these systems impliesthat their analysis and understanding can be enhancedby organizing their numerous components into fewerdiscrete, interactive units at different levels based ondifferences in process rates (O’Neill et al. 1989; King1999). When these ideas are considered in relation tothe spatial, spectral, temporal, and radiometric prop-erties inherent to remote sensing data (Marceau andHay 1999a), the keys to fully unlock the complex re-lationships between scale-specic landscape patternsand processes appear close at hand. For example,Moody and Woodcock (1995), Benson and MacKen-zie (1995), O’Neill et al. (1996), and Pax-Lenneyand Woodcock (1997) describe the inuence of remotesensing resolution on detecting landscape patterns andprocesses. Bian and Walsh (1993), Souriau (1994)and Walsh et al. (1997) discuss the identication of
-
8/9/2019 2002 Hay LSE Full
2/20
472
Table 1. List of general terms and abbreviations.
AVHRR Advanced very high resolution radiometerAVIRIS Airborne Visible Infra-Red Imaging SpectrometerC.Cut Clear-cutCASI Compact Airborne Spectrographic ImagerCCD Charged-couple device
DNs Digital numbers or gray-scale valuesFPAR Fraction of photosynthetically active radiationHPDP Hierarchical Patch Dynamics ParadigmH-res High resolutionIFOV Instantaneous eld of viewLAI Leaf area indexL-res Low resolutionMAUP Modiable areal unit problemMODIS Moderate-resolution Imaging SpectroradiometerPSF Point-spread functionRMSE Root mean square errorSPOT Satellite pour l’Observation de la TerreTM Landsat Thematic Mapper
landscape scale-thresholds and domains of scale asviewed in remotely sensed data. Caldwell et al. (1993),Ustin et al. (1993), Friedl et al. (1995), Cullinan et al.(1997), DeFries et al. (1997), and Stewart et al. (1998)describe the challenges of scaling remote sensing dataand the implementation of multiscale approaches forecosystem models.
In addition to the remote sensing platforms morefamiliar to landscape ecologists such as AVHRR ⊗ ,
TM⊗
and SPOT⊗
, lesser-known hyperspectral air-borne sensors like CASI ⊗ and AVIRIS ⊗ have been inoperation for over a decade providing unique oppor-tunities to diagnostically examine landscape patternsand processes at very ne spatial and spectral scales(Wessman et al. 1989). These sensors allow for thediscrimination of landscape structures that are absentin coarser imagery, thus providing opportunities tolink eld data with patterns at much coarser scales(Treitz and Howarth 2000). They also serve as ex-cellent test-beds for conducting ne-scale landscapeanalysis in preparation for data available from thenew high-resolution satellites such as Ikonos (with itscommercially available 1 m 2 panchromatic and 4 m 2multispectral channels), MODIS ⊗ (with its 36 co-registered channels ranging from 250 m 2–1 km 2), andHyperion (launched in November, 2000 with a capac-
⊗ See Table 1.
ity to acquire 220 spectral bands (from 0.4 to 2.5 µ m)at a 30 m 2 spatial resolution).
It is becoming increasingly apparent that in orderto fully understand the complexity of landscape dy-namics we require the ability to recognize broad-scalepatterns and processes, and relate them to those at ner
scales where we are most familiar (Wu and Qi 2000).These high-resolution sensors provide critical data andperspectives that will assist in bridging this knowledgegap.
While remote sensing data hold great promise, it isalso important to recognize their limitations. In partic-ular, all remote sensing data represent a unique formof the modiable unit areal problem or the MAUP (fora comprehensive review see Marceau 1999). Thoughthe importance of MAUP has previously been notedin landscape ecology (Jelinski and Wu 1996), its rela-tionship to remote sensing data remains poorly recog-nized and understood (Wu et al. 2000). In particular,the effects of MAUP can be especially devastatingduring scaling, where arbitrarily extrapolating site-specic measurements to coarser scales can result insubstantial error (Gardner et al. 1982; King 1990).Thus the ramications for inappropriately using re-mote sensing data to understand multiscale landscapepatterns/processes are profound. This is especially rel-evant in landscape ecology, where multiscale studiesare increasingly conducted (Wu and Qi 2000), andwhere land-cover classications generated from satel-lite imagery are frequently used to characterize theecology of large areas and to make generalizations
about the distribution of species and communities(Townsend 2000).
The primary objectives of this paper are to de-scribe a novel approach for analyzing and upscalingremotely sensed data, and a multiscale extension tothis approach, both of which are based on the spa-tial inuence of the dominant objects composing thescene, rather than relying solely on user bias. Thesenovel approaches incorporate object-specic analysisand solutions to the MAUP. Together they representa framework for spatially dening critical landscapethresholds and domains of scale, ecotone boundaries,and the grain and extent at which scale-dependentecological models could be developed, and applied.
Theoretical background
The following two sections briey provide a theo-retical background on scale, scaling, the relationshipbetween remote sensing imagery and MAUP, and the
-
8/9/2019 2002 Hay LSE Full
3/20
473
fundamentals of object-specic analysis and object-specic upscaling, and their relationship with otherscaling techniques.
Scale, scaling, remote sensing imagery and MAUP
Conceptually, scale represents the ‘window of percep-tion’, the lter, or measuring tool with which a systemis viewed and quantied. As scale changes, so do theassociated patterns of reality, which has obvious im-plications for understanding any organism, place, orsystem. An important characteristic of scale lies inthe distinction between grain and extent. Grain refersto the smallest intervals in an observation set, whileextent refers to the range over which observations ata particular grain are made (O’Neill and King 1998).Within a remote sensing context, grain is equivalentto the spatial resolution of the pixels composing animage, while extent represents the total area that an
image covers.Associated with multiscale analysis is the term
domain of scale (or scale domain). This refers to aregion of the scale spectrum over which, for a partic-ular phenomenon, patterns do not change or changemonotonically with changes in scale. Such domainsare separated by scale thresholds - relatively sharptransitions or critical points along the spatial scalecontinuum where a shift in the relative importance of variables inuencing a process occur (Meentemeyer1989; Wiens 1989).
To analyze objects, or entire scenes at differ-
ent scales, and to utilize information between thesescales, appropriate scaling methods are required. Scal-ing refers to transferring data or information fromone scale to another. It requires the identication of the factors operational at a given scale of observa-tion, their congruency with those on the lower andhigher scales, and the constraints and feedbacks onthose factors (Caldwell et al. 1993). As noted by Jarvis(1995), scaling represents a real challenge because of the non-linearity between processes and variables, andheterogeneity in properties that determines the ratesof processes. In practice, scaling can be performedfrom a ‘bottom-up’ or a ‘top-down’ approach: upscal-ing consists of using information at smaller scales toderive information at larger scales, while downscalingconsists of decomposing information at one scale intoits constituents at smaller scales.
Allen and Hoekstra (1991) suggest that scale is nota property of nature alone but rather is something as-sociated with observation and analysis, and that the
scale of a process is xed only once the observer hasspecied the actors in the system. So what happenswhen the scale of observation is arbitrarily derived, asis the case with remote sensing data? Quanticationproblems resulting from such arbitrariness are knownas the modiable unit areal problem or the MAUP
(Openshaw and Taylor 1979; Openshaw 1981).The MAUP originates from the fact that a sig-nicant number of different – often arbitrary – waysexist by which a study area can be divided into non-overlapping areal units for the purpose of spatialanalysis. In essence, the MAUP represents the sen-sitivity of analytical results to the denition of datacollection units, and is illustrated by two related butdistinct components: the scale problem and the aggre-gation problem . The former is the variation in resultsthat can be obtained when areal units are progres-sively aggregated into fewer, larger units for analysis;the latter represents the variation in results gener-ated by the use of alternative aggregation schemes atequal or similar resolutions (Openshaw 1984). Con-sequently, the potential for error in the analysis of spatial data resulting from MAUP is signicant, andhas been recognized in a number of studies (Dudley1991; Fotheringham and Wong 1991; Hunt and Boots1996).
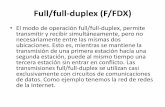
Marceau (1992) was among the rst to demon-strate that remote sensing data represent a particularcase of the MAUP. In a remote sensing scene, an imagemay be envisioned as a regular net arbitrarily thrownover a study area where the grain and extent of the
mesh dene the areal units measured (Figure 1). Morecorrectly, each pixel represents an integrated radiancemeasure corresponding to the spectral, spatial, tempo-ral, and radiometric inuence of the real-world objectswithin the area delineated by the instantaneous eldof view (IFOV) of the sensor (Duggin and Robinove1990). IFOV determines how much of the ground areathe sensor ‘sees’ at any given instant in time. This re-sults in three general situations: the ground featuresof interest are smaller than, approximately equal to, orlarger than the spatial sampling unit. It should be notedthat within a single image, each of these samplingcombinations are possible, and in fact very probable.In the rst situation, this type of image is referred to aslow resolution or L-res , in the second and third cases,as high resolution or H-res (Woodcock and Strahler1987). Consequently, every image is characterized bya scale and aggregation level, which determines itsstructure and information content. Recognizing this iscritical for determining what information can be ex-
-
8/9/2019 2002 Hay LSE Full
4/20
474
Figure 1. The relationship between grain and extent in remote sensing imagery.
tracted from an image, and how reliable it is (Marceauet al. 1994).
Fortunately, several solutions to MAUP have beensuggested (Fotheringham 1989). In particular we notetwo important concepts related to these solutions.First, the MAUP does not exist if analysis is performedwith basic entities. The term basic entity refers to anobject composed of similar parts that are different thanitself. For example, if we consider a tree-crown as abasic entity, conceptually it may be composed of , oris an aggregate of leaves, and branches, each of whichindividually belongs to classes that are themselves, ba-sic entities. Thus, identifying basic entities providesthe clearest way out of the MAUP, as a user works withspatially discrete entities rather than arbitrarily dened
areal units (for additional information see Fothering-ham, 1989). Second, while the MAUP certainly posessignicant challenges, it can also reveal critical in-formation for understanding the structure, function,and dynamics of complex real world systems if it isrecognized and dealt with explicitly (Jelinski and Wu1996). Part of the challenge in recognizing MAUP is
that there is no unique ‘MAUP statistic’ to quantify itsinuence, though correlation analysis and other tech-niques have been used (Amrhein and Reynolds 1996;Hunt and Boots 1996). Instead, users of spatial datamust be cognizant of the fact that spatial analysis of arbitrarily dened areal units can produce results thatmay not necessarily represent the content of the orig-inal units, but rather, the associations between them(i.e., aggregation problem) and the scale at which theywere assessed (i.e., scale problem).
The fundamentals of Object-Specic Analysis (OSA)and Upscaling (OSU)
Object-Specic Analysis (OSA) is a multiscale tech-nique that denes unique spatial measures, specicto the individual objects composing a remote sens-ing scene. These object-specic measures are thenused in weighting functions for upscaling an image toa coarser resolution. The resolution of the upscaledimage can either be dened manually by the user(see further), or automatically by statistical proper-ties of the objects composing the image (see further).
-
8/9/2019 2002 Hay LSE Full
5/20
475
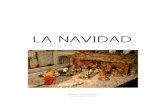
Figure 2. Tree-crown image-objects. This CASI sub-image hasbeen magnied to illustrate the relationship between individualpixels (gray-tone squares) and the tree-crown image-objects theyperceptually represent. Individual crown centers are dened by asingle black pixel. The spatial resolution of each pixel is 1.5 m 2 .
Both forms of upscaling are referred to as Object-Specic Upscaling (OSU) because they incorporateobject-specic weights. Thus, MAUP effects are mini-mized in bothOSA and OSU, as object-specic spatialinformation is incorporated throughout the analysis.
An underlying premise of OSU is that H-resimage-objects should have more inuence on an up-scaled signal than a single L-res pixel – which signal isalready regularized 1 . The term ‘image-objects’ refersto basic entities, located within an image that are per-ceptually generated from H-res pixel groups, whereeach pixel group is composed of similar digital values,and possesses an intrinsic size, shape, and geographicrelationship with the real-world scene component itmodels [e.g., a tree crown (Figure 2)].
The heuristics determining this threshold of ‘sim-ilarity’ are based on the novel concept that all pixelswithin an image are explicitly considered H-res sam-ples of the scene-objects they model, even though (aspreviously described) each pixel many represent bothH- and L-res object information. The importance of this rule is that by biasing for H-res samples only,we explicitly seek objects that exist at, or over, alarger spatial extent than the area covered by the in-
dividual pixels that compose them. Essentially, weare using parts of objects (grain) to dene the ex-tent of objects that exist at their next (coarser) scales.
1 Regularization is a signal-processing term describing the integra-tion of signals generated by objects that are no longer individuallydiscernable (thus L-res), due to the physical limitations of thesensing device in relation to the size of the objects being assessed.
The spatial extents dened are then used as weightsto representatively upscale the image to a coarserresolution.
Similar to Mandelbrot’s famous question concern-ing the length of a coastline, the answer is dependenton the precision of the measuring tool (Mandelbrot
1967). In the case of OSA, the maximum sized objectthat can be dened is represented by the relationshipbetween the spatial resolution of pixels composing theobjects within a scene, and the ability of the heuristicsto dene this object’s edges. As a result, this tech-nique can be applied to any type of remote sensingdata from H-res data such as the CASI (airborne), andIkonos (satellite), to medium resolution TM and low-resolution AVHRR. The only difference in each caseis to appreciate the relationship between the pixel size,and the geographic size of the object of which the pixelis a component. In a CASI data set, pixels could beconsidered parts of individual trees, trees being theobject of analysis. In TM data, individual pixels maybe considered parts of a particular forest stand, and inAVHRR data, individual pixels may represent parts of a larger extent, more general landscape entity such asa deciduous broad-leaf forest class.
Though sharing similarities with other scaling andscale detecting techniques (Turner et al. 1991; Gard-ner 1998), OSA is unique, in that it incorporates anexplicit multi-resolution (i.e., hierarchical) samplingand evaluation of each pixel in relation to the (differ-ent sized) coarser grain objects of which it is a nestedconstituent. For example, while scale variance analy-
sis (Moellering and Tobler 1972) is also a hierarchicalapproach, there is no consideration of pixels as parts of individual objects composing a scene. Instead, pixelscomposing the image are aggregatedby systematicallyincreasing grain size (for the entire image), resultingin a nested hierarchy of images with the same extent,but with different spatial resolutions. A measure of thetotal scene variance is then evaluated for each imagein the hierarchy, and the results are plotted illustratingpotential scale thresholdsat specic resolutions withinthe entire scene. A similar approach is described byWoodcock and Strahler (1987), where local scene vari-ance is graphed as a function of increasing spatialresolution, and also by Marceau et al. (1994) wherea minimum spectral variance threshold is used to de-ne the optimal spatial resolution of different forestclasses.
In OSA, a ubiquitous ‘optimal’ resolution is neverfound, as none exists in images representing com-plex heterogeneous environments (Hay et al. 1997).
-
8/9/2019 2002 Hay LSE Full
6/20
476
Instead, different ‘optimal’ resolutions or thresholdsare dened based on the different objects being as-sessed (Hay et al. 1996). In the previous examples,the described techniques are used for scale explorationonly. They do not explicitly consider individual pixelsas parts of variously sized, shaped, and spatially dis-
tributed objects, and they do not include facility forupscaling, or provide information indicating where inthe image such spatial thresholds exist. OSA does notshare these limitations.
Materials and methods
Study site
Our initial interest in scale issues was based on under-standing the spatial evolution of individual trees andforest gaps through scale (Marceau and Hay 1999b),particularly as it relates to changes in landscape frag-mentation. To facilitate this we applied OSA andOSU to H-res CASI data, which allowed us to followthe evolution of familiar image/site structures throughscale. The CASI (Compact Airborne SpectrographicImager) is a pushbroom sensor designed to operatefrom light aircraft and helicopters, with data capturecapabilities based on a two-dimensional frame transferCCD array. 16 bit signed data were collected dur-ing 20:10–21:40 h (GMT) over the Sooke Watershed,Vancouver Island, British Columbia, Canada on Au-gust 1, 1993 (Figure 3). The data were radiometricallycorrected to 1.5 m 2 pixels, and a study site (Fig-
ure 4a) was located along Rithet Creek and extractedfrom a channel centered at 0.66 µ m (+ / − 0.05 µ m).This scene was then corrected for geometry andatmosphere, and all subsequent analyses were per-formed on it. Ancillary data include 1:10,000 forestinventory maps, numerous eld surveys, and 1:12,000color near-infrared (NIR) aerial photography (1993).In this area, the very dry maritime Coastal WesternHemlock biogeoclimatic subzone dominates, though asmall component of moist maritime Coastal Douglas-Fir subzone also exists.
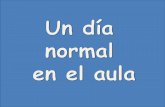
In Figure 4a, three principal stand types are vis-
ible, each of which illustrates the dominant seraltree species - Coastal Douglas-Fir [( Pseudotsugamen- ziesii ) (Mirb.) Franco var. menziesii ]. Located in thecenter of this image is a mature stand (141–250 yrs)with a crown-closure of 56–65%. Below it (bottomcenter) is a dense young stand (21–30 yrs) with acrown-closure of 76–85%. Surrounding these two, no-tably on the image left, is a stand of mixed-immature
and mixed-young individuals (1–20 yrs), with crownclosures ranging from 0–45%. Three gravel roadstransect the scene and are represented as bright lin-ear features. An exposed sparsely vegetated clear-cut(C.Cut) lies adjacent to a gravel road at the upper rightquadrant of the scene, and a small, partially vegetated
marsh is located at the bottom right. Throughout thesite, many exposed soil, and soil-grass patches are vis-ible. In the Thematic Map (Figure 4b), these patcheshave been classied as C.Cut.
OSA and user-dened OSU
In the earth sciences it is generally observed that ob- jects closer to each other are more alike than thosefurther apart (Curran and Atkinson 1998). Similarly,in a remotely sensed image, spatially near pixels tendto elicit a strong degree of spectral autocorrelation.Therefore, plotting the digital variance of samples
(pixels) located within increasingly larger kernels,while centered on an image-object of known size tendsto produce a distinct break, or threshold in varianceas increasing sized kernels contact the image-object’sedges. The unique window size (VT w) dened atthis variance threshold location (VT ij) correspondsexplicitly to the object’s known size, and is a keycomponent for determining object-specic weightingvalues [ i and j represent row and column within theoriginal CASI image (O I)]. Conceptually, VT w maybe considered similar to lag as described when usingsemivariance. For example, the window size at loca-
tion (A) in Figure 5 represents the maximum scalefor dening the (inset) tree-crown 2 . Locations B-C,D-E, and F-G, represent an object-specic range of ‘optimal’ window sizes for dening the nested image-objects, of which the center tree-crown pixel (whitedot) is a member. Locations B, D, and F representthe local variance minima corresponding to the scaleswhere the next set of ‘nested’ objects are rst manifest.Minimum variance indicates that the pixels composingthis measure are locally the most spectrally similar,thus they are the most ‘object-like’, while variancemaxima located at C, E, and G, respectively, representthe maximum spatial extents of these nested objects.Locations A-B, C-D, and E-F are explained in theDiscussion section.
The window size at one iteration prior to VT ij isused to dene the maximum area (A ij) at which the
2 The inset image has been extracted form the mature-stand in O I ,and the corresponding curve represents the actual variance valuesdetermined at each incremented widow size.
-
8/9/2019 2002 Hay LSE Full
7/20
477
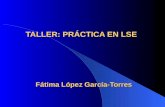
Figure 3. Rithet Creek study site map.
Figure 4. Remote sensing image and thematic map of the study site. A). CASI image illustrating the study area (36 ha 2 ) at a spatial resolutionof 1.5 m 2 . B). Thematic site map and legend (same scale).
-
8/9/2019 2002 Hay LSE Full
8/20
478
Figure 5. Variance characteristics of a single tree-crown pixel dened through multiple scales. The curve of this graph results from plotting
the variance of the digital values of all pixels located within increasing sized square windows. In this illustration, varying sized windows arecentered over an individual tree-crown (circular image-object) that is located within the white bars of the inset image. The crown center isdened by a single white pixel that represents the apex of the tree. As the window size increases, the resulting variance value is plotted. Inpractice this form of multiscale analysis is applied to all pixels composing a scene. The maximum window size specied for each pixel is denedwhen variance measures meet unique object-specic heuristics that correspond to the spatial extent of the real-world objects they model.
central pixel under analysis is spectrally and spatiallyrelated to its neighbours. At the same time that A ij isdened, the corresponding mean (M ij) and variance(V ij) values are also dened for the central pixel withinVT w . These procedures are then applied to all remain-ing pixels in O I , resulting in corresponding variance(V I), area (A I), and mean (M I) images.
Once V I , AI , and M I have been generated, twosteps are required to complete user-dened OSU. Therst involves determining an object-specic weight(W ij ) for each ( ∀) pixel (P ij ) in O I , which is repre-sented by W ijK .
∀Pij ∈ OI (1)
W ijK = (AijK / SK )
W ijK denes the object-specic weight for each A ijwithin an upscaling kernel ( K ) [of a ( k∗k) user-deneddimension], where S K is the sum of all A ij within K
(see equation 2).
SK =k
i
k
j
A ij (2)
The second step is to apply the object-specic weightto produce a new upscaled image.
∀UP LM ∈ UI
UP LM = k
L
k
M
O ij∗W ij
(3)
UP LM represents an upscaled pixel located at row L ,column M , in the resultant upscaled image U I. Oij
is the DN (digital number) of the pixel located inthe original image at row i , column j , that is evalu-ated within the upscaled kernel. UP LM and the pixelswithin rows ( i − k, j + k) and columns ( i + k, j − k)represent the same real-world extent. Thus U I is com-posed of fewer pixels than O I , though both representthe same geographic area. Resampling within the up-scaling kernel is represented by the double summationof all DNs to a single object-weighted pixel valuethat is located within the new upscaled image. Thenon-overlapping kernel is then moved a distance of Kpixels across O I, and the process is iterated until a newupscaled image U I is generated.
A multiscale extension: Iterative OSA and OSU
Although a single remote sensing scene represents aunique instance of all discernible objects within itsextent, we hypothesize that it also contains additionalinformation related to image-objects (IOs) that exist
-
8/9/2019 2002 Hay LSE Full
9/20
479
over a ‘limited’ range of coarser, non-immediately dis-cernible spatial scales, located within the same extent.Support for this comes from three sources:
1. Appreciating that both H- and L-res informationexists within an image collected at a single resolu-
tion (Woodcock and Strahler 1987)2. Understanding the intimate relationship betweenIFOV and object size (Slater 1980)
3. Recognizing that previous work illustrates the abil-ity of OSU methods to reveal patterns that consis-tently model the spatial extent of differently sizedobjects existing at coarser scales (i.e., tree crowns,canopy gaps, etc, Hay et al. 1997).
To exploit this range of multiscale informationwithin a single image, we hypothesize that by itera-tively applying OSA to dene object-specic (max-imum and minimum) variance-thresholds within M I ,dominant landscape objects will emerge through the it-eration process. In essence we are applying principlesof non-linear feedback to ascertain if self-organization(Kay and Schneider 1995) – in the form of patternscorresponding to the spatial extent of dominant land-scape objects – will ‘emerge’ at each new scale. Wenote that our goal in developing and applying object-specic techniques is to allow for previously existingself-organized patterns (i.e., image-objects) to be de-tected within the image/landscape at different scales.It is not to generate new self-organizing patterns. Thissubtle difference is important to clarify, because a
strict requirement of self-organization includes tem-poral evolution (Nicolis and Prigogine 1989; Coveneyand Higheld 1991), while a single remote sensingimage – and all analysis performed on it – can onlyrepresent an instance in time.
The result of this iterative approach is a nested hi-erarchy of image-sets (IS t) composed of V I, AI andM I that have membership ( ∈) in a unique scale do-main (SD n). Within this SD n , each image has thesame grain and extent, and represents the results of multiscale analysis specic to the individual image-objects composing it. Following this logic, each SD n isa member of a scale-domain super set (SDS) that rep-resents the entire range of object-specic multiscaleanalysis (OSA) and scaling results (OSU) evaluatedwithin the xed spatial extent of a unique digital land-scape (O I). This hierarchical structure (outlined inFigure 6) may be described in the following manner:
Pij ∈ IO s ∈ IS t ∈ SD n ∈ SDS (4)
Figure 6. Hierarchically nested components of iterative ob- ject-specic analysis (OSA) and object-specic upscaling (OSU).
A digital landscape is composed of pixels (P ij)that are parts of image-objects (IO s), that are denedwithin a specic image-set (IS t), that is a member of ascale-domain (SD n), which populates a scale-domainset (SDS).
To operationalize this framework with minimaluser-bias, we apply object-specic concepts to se-lect the most appropriate images for upscaling. Tominimize the scale problem resulting from arbitraryscaling, we apply a resampling heuristic (R h ) basedon the relationship between image-objects and pixelsize, and apply OSU as our upscaling algorithm (Hayet al. 1997). This combination of iterative OSA andOSU constitutes an object-specic multiscale frame-work for landscape analysis that is further discussedin the following sections.
Selecting an iterated MI to upscale
Through the iteration process, M I pixels increasinglybecome parts of objects existing over larger and largerextents, yet the spatial resolution of the pixels repre-senting each new image-object remains constant. Toreduce unnecessary computation, an appropriate M Imust be evaluated within each IS t to determine if up-scaling is necessary. In the rst OSA iteration, theexact process described in section ‘OSA and user-dened OSU’ is applied. That is, each P ij is assessed
-
8/9/2019 2002 Hay LSE Full
10/20
480
within larger windows until a local maximum variancethreshold (VT w(max ) ) is reached that corresponds to a‘peak’ location as illustrated by (A) in Figure 5. Whenapplied to the entire image, this process generates therst image-set (i.e., V 1 , A1 , M 1 ).
In the second iteration, each P ij (in the newly
generated M 1) is assessed within larger windows un-til a local minimum variance threshold (VT w(min ) ) isreached. This results in the generation of a secondimage-set (i.e., V 2 , A2 , M2 ) that represents the be-ginning scales of all newly emergent image-objects.Conceptually, each pixel in M 2 will be representedby a local variance saddle or pit, as illustrated by (B)in Figure 5. Therefore, odd-numbered OSA iterationsdene scales representing the ‘end’ of objects, whileeven-numbered OSA iterations dene the beginningscale of the next emergent object(s). As a result, all M Igenerated from even-numbered OSA iterations will beselected for upscaling.
Dening an upscale resolution ( Rh )
Once an appropriate image has been selected for scal-ing, the upscale resolution will be dened by a resam-pling heuristic (R h) that is based on the relationshipbetween pixel size, and the size of the minimum dis-cernible image-object for which VT w was initially de-veloped. R h is similar to recommendations by O’Neillet al. (1996), who suggest a grain size 2 to 5 timessmaller than the spatial features of interest, and asample area 2 to 5 times larger than the patches as-
sessed. We note that this grain size recommendationcorresponds to a reference by Slater (1980) regardingthe point-spread function (PSF) 3 of the sensor. Essen-tially, if an object is less than 14 the size of the sensor’sIFOV, its inuence in the corresponding pixel is equalto the sensor PSF. In modern sensors this value is ex-ceptionally small, though it can be dened for eachsensor, and included within the model. For the pur-pose of this study, R h equals the resampling resolutionwhere the minimum area (A min ) of all pixels compos-ing the image-objects dened in A I must be four timeslarger than the spatial resolution of the current image.This ensures not only detection (as implied by the 14PSF rule), but also identication (Jensen 1986). Byadopting this 4:1 relationship we are again erring onthe side of caution (i.e., under-sampling).
3The PSF denes the spatial inuence or ‘spread’ of a zero-dimensional point of light resulting from lens aberrations in thesensor.
We also note, that if 14 represents detection, and4:1 represents identication, then a fuzzy (i.e., notspecically dened) range of scales (a maximum of)16 times an object’s minimum detectable size exists,where part of an object’s spatial inuence is poten-tially discernible within a single image. This further
supports the hypothesis in the above section regardinga limited range of object-specic spatial informationwithin a single image.
Upscaling strategy
In a previous study, Hay et al. (1997) evaluated OSUagainst four resampling or scaling techniques tradi-tionally included in remote sensing image-analysissoftware. Over a gigabyte of data were analyzedand upscaled from 1.5 m to 3 m, 5 m, and 10 m,respectively, using nearest neighbor, bilinear inter-polation, cubic convolution, non-overlapping averag-
ing, and OSU. All upscaled images were evaluatedagainst (non-upscaled) data of the same scene orig-inally collected at a 10-m spatial resolution. Thetechnique producing an upscaled image most visuallyand statistically similar to the original 10-m imagewas considered the most appropriate upscaling tech-nique. Six thousand samples representing six differentforest classes were evaluated using the smallest root-mean-square-error (RMSE) results to represent thebest technique. Results indicate that OSU producedthe most visually and statistically accurate upscaledimages of those tested, with the lowest RMSE in 10
out of 18 classes over all forest types and ranges of scale tested. In the eight times it did not obtain thelowest RMSE, it produced six values with the secondlowest errors. Based upon these results OSU is con-sidered the most appropriate upscaling technique, thusit is used to resample the selected M I to a resolutionspecied by R h . To accomplish this, R h is appliedto Equation 1, replacing the user-dened upscalingkernel size ( K ). This iterative OSA and OSU strat-egy is then applied until VT w is larger than the imagedimensions.
Results
The original CASI image (O I) spatially represents acomplex forest scene spanning a geographic extentof 600 × 600 m. Spectrally it represents both the
-
8/9/2019 2002 Hay LSE Full
11/20
481
Table 2. Image information and object-specic procedures for generating Figure 7.
SD n IS t Components OSA t OSU n MI Dimensions Grain (m 2 ) # Pixels
SD 0
OIIS1 = V1 , A1 , M1IS2 = V2 , A2 , M2
12
0 400 × 400400 × 400400 × 400
1.51.51.5
160000160000160000
SD 1
U1IS3 = V3 , A3 , M3IS4 = V4 , A4 , M4
34
1 250 × 250250 × 250250 × 250
2.42.42.4
625006250062500
SD 2
U2IS5 = V5 , A5 , M5IS6 = V6 , A6 , M6
56
2 156 × 156156 × 156156 × 156
3.843.843.84
243362433624336
SD 3
U3IS7 = V7 , A7 , M7IS8 = V8 , A8 , M8
78
3 98 × 9898 × 9898 × 98
6.146.146.14
960496049604
SD 4
U4IS9 = V9 , A9 , M9
IS10 = V10 , A10 , M10
910
4 61 × 6161 × 6161 × 61
9.839.839.83
372137213721
Table 3. List of Object-Specic terms and abbreviations.
∀ For each . . .∈ Has membership in . . .VT w(max ) Local maximum variance dened with the variance threshold windowAI , A ij , A 2 Area-image, Area value dened at (i, j), Area-image generated at OSA 2EOs Edge-objectsIOs Image-objectsIS t Image-set generated at OSA iteration (t)K, SK Upscaling kernel of ( k
∗k) user-dened dimensions, Sum of all Aij
within KLTD v The Landscape-threshold-domain, where (v) represents the number of landscape
thresholds dened by TSV within the SDSMI , M ij , M 2 Mean-image, Mean value dened at (i, j), Mean-image generated at OSA 2OI Original CASI imageOSA t Object-specic analysis at iteration (t)OSU n Object-specic upscaling at the (n th ) upscaling iterationPij Pixel located at row (i), column (j) in a 2D imageRh Resampling heuristicSD n Scale-domain, resulting from the (n th ) OSU iterationSDS Scale-domain-setTSV Total scene varianceUI , U 2 Upscale-image, Upscale-image generated at OSA 2UP LM An upscaled pixel located at row L , column M , in the U IVI , V ij , V 2 Variance-image, Variance value dened at (i, j), Variance-image generated at OSA 2VT w(max ) Local maximum variance dened with the variance threshold windowVT w(min ) Local minimum variance dened with the variance threshold windowVT w , VT ij Variance threshold window, Pixel location (i, j) dened at the variance thresholdW ijK Object-specic weight dened at row (i), column (j) within K
-
8/9/2019 2002 Hay LSE Full
12/20
482
minimum chlorophyll a reectance signal 4 , and theabsorption maximum of solvated chlorophyll a (Kirk et al. 1978). In this study, it is also considered asurrogate measure of vegetative ‘greenness’. Whenthe multiscale extension is applied to O I, the resultis a hierarchy of image-sets (SD n ), each consisting
of variance (V I), area (A I), and mean images (M I),with the same spatial resolution. As upscaling occurs,the spatial resolution of the newly generated image-sets increase as do their scale domain subscripts i.e.,SD n+ 1 . The iteration where OSU rst takes place is re-ferred to as SD 1 . The image-set prior to this is SD 0 - asupscaling is not applied. Figure 7 illustrates image-setswithin the rst four scale-domains (SD 0− 3), generatedfrom automatically applying 10 iterations of OSA, and4 iterations of OSU to the original CASI image. Theprocedures for producing these results are outlined inTable 2, and are summarized as follows.
OSA was applied to the O I where object-specicmeasures of maximum local variance were assessedfor every pixel resulting in the rst image-set (V 1 , A 1 ,and M 1). OSA was then applied to the newly gener-ated M 1 , where object-specic measures of minimumlocal variance were similarly assessed, resulting in thesecond image-set (V 2 , A2 , and M 2 ). Together, theseimage-sets and O I represent the rst scale domain(SD 0), of which V 2 , A 2 , and M 2 are illustrated in Fig-ure 7. Based on the concepts described above, M 2 wasautomatically selected for upscaling to a resolutiondened by R h . This resulted in a grain change from1.5 m to 2.4 m and the generation of the rst upscaled
image (U 1). These procedures were then repeated forthe next 8 iterations, substituting in the appropriatelydened M I , R h , and U I variables. In all cases, the re-sulting upscale images (U 2− 4) were used as the ‘seed’images for OSA, from which new image-sets (IS 3− 10 )composing the additional scale-domains (SD 1− 4) weregenerated. To facilitate visual comparisons 5 betweenthe image-sets illustrated in Figure 7, each upscaledimage was resampled to 400 × 400 pixels. Resamplingwas performed using nearest neighbor so that originalDN values were not changed. As a result, images inlatter scale-domains appear more ‘blocky’ than thosein SD 0 .
4Though radiometrically ‘close’, the low trough in spectra asso-ciated with plants is nearer to 675 nm than to the spectral bandlocation (655–665 nm) dened in this data set.5All gures are 8 bit linearly scaled versions of 16 bit data that havebeen enhanced for illustration. In the original images, far greatervisual clarity is achieved than in print.
As the grain size increased through the upscalingprocess from 1.5 m to 9.83 m, the total number of pixels in the image was reduced from 160,000, to3,721. Object-specic analysis was stopped at OSA 10 ,as analyzing kernels contacted the borders of the im-age. Throughout the scaling process, the scene extent
remained constant at 600 × 600 m, but the physical di-mensions of the generated images were systematicallyreduced from 400 × 400, to 61 × 61 pixels. The visualdifferences in information content resulting from theseprocedures are illustrated in Figure 8, where U 1− 4 isillustrated against the background of O I . We note thatOSU was applied to M 2,4, 6,8 to generate this upscalecomposite.
Within each SD n , the V I represents a threshold-image resulting from OSA. Essentially it illustrateswhere the edges of differently sized objects have beenreached. Bright tones dene areas of high variance(object edges), while darker tones dene areas of lowvariance (object interiors) e.g. bright road edges vs.dark young forest (image bottom) in V 2 . Similarly,each A I models the maximum spatial extent – or areaof inuence – of its constituent objects at a specicgrain dened within the variance threshold kernel.This important measure represents the unique (scale-specic) areas over which dominant landscape objectsexist, thus it is used to determine object-specic-weights for scaling. Because image-objects are com-posed of similar pixels, they tend to be assessed withinsmaller kernels, as their accompanying variance mea-sures are small. This results in correspondingly small
area values, which are visually represented by dark ar-eas. In A 2 , dark tones within the mature stand (imagecenter) clearly correspond to individual tree crowns,while the brighter surrounding values correspond toedges composed of shadow and or understory pixels.Visually, these results strongly support the validity of objects-specic heuristics (at least over ne scales),as individual trees illicit complex illumination/shadeeffects on either side of their crown, yet both sides areconsidered part of a single object (i.e., a dark tone).
In each M I every pixel represents a H-res memberof a newly detected image-object that exists at its next(coarser) scale i.e., branches and leaves now becomepart of a tree crown. Because these images are gen-erated from average values calculated within specicthreshold kernels, they represent the dominant imagestructure dened at a specic spatial resolution withina unique scale-domain. To enhance interpretation of the overall structural evolution of each M I composingSD 1− 4 , we have applied a simple linear color table, as
-
8/9/2019 2002 Hay LSE Full
13/20
483
Figure 7. Scale domain sets (SDS 0− 3 ) consisting of variance (V I), area (A I), and mean (M I ) images.
-
8/9/2019 2002 Hay LSE Full
14/20
484
printed gray-tone gradations are more difcult to dis-tinguish. In each M I , black and purple represent high-density vegetation, dark blue represents low-densityvegetation, and light blue-green represents the gra-dient between sparsely vegetated and non-vegetatedareas. Clear-cut areas with varying amounts of vegeta-
tion range from green-yellow, where colors representlow-density invading grasses and shrubs on partiallyexposed soils, to orange-red, representing the max-imum scene brightness resulting from fully exposedsoils.
As the spatial resolution of each SD n changes, eachVI, A I , and M I visually delineate newly dened scale-specic structures that represent the dominant objectsemergent at these scales. In SD 0 a large amountof recognizable object structure is explicitly dened.In particular, individual tree crowns, their shadows,canopy gaps, patches of exposed soil and vegetation,road edges, and vegetation along roads are highly dis-cernible in both V 2 and A 2 . In SD 1 we see an obviousevolution from individual crown structures within themature stand (as dened in V 2 and A 2), to larger sizedobjects (dark patches) that correspond to areas of highstand densities and include reective characteristicsfrom crowns, shadows, and understory. At this scale,the (highly reective central) gravel road is inuencedby the spectral characteristics of the surrounding veg-etation, causing it to change from green-yellow (asdepicted in M 2) to a light blue (in M 4 ). It is alsoimportant to note the increasing spatial effect (i.e.,larger areas of bright tones in A 4) appearing along
the edge of vegetated and non-vegetated areas. In V 4 ,this is represented by bright linear features around(darker) objects, and will be referred to further in theDiscussion section.
In SD 2− 3 we see a dramatic change in the over-all scene composition from the previous scale-domainsets. Here, the images clearly illustrate a distinct evo-lution within three dominant object groups: C.Cut (in-cluding roads, grasses, and bare soil depicted), young-forest (which includes young and juvenile classes),and mature forest. The net result is an increasing spa-tial and spectral encroachment of clear-cut, and lowvegetation density areas within locations that were ini-tially densely vegetated. This is most apparent in theupper right quadrant of each image, where the spatialinuence of C.Cut, and lower density vegetation (i.e.,young forest) increase at the expense of mature forest.
Figure 8. This upscale image (U 1− 4 ) composite illustrates the dif-ferent image extents resulting from four iterations of object-specicupscaling (OSU).
Discussion
What exists between the end of one image-object and the beginning of another?
We suggest that multiscale image-object thresholds areoften far more ‘fuzzy’ or less discrete than the termthreshold commonly implies. This is because the pix-els used to evaluate image-thresholds are themselves a
hemispherical integration of reected light, which rep-resents the non-linear interaction of entities existingover different scales. For example, a single ‘threshold’pixel dening the extent of a tree-crown may share itscomposition with a portion of this crown’s edge, theneighboring crown shadow, understory, and partial re-ectance from near-by exposed soil. Therefore, ratherthan a pixel being part of a nested hierarchy of discreteimage-objects that spatially lie adjacent to each otherthrough scale, there exists instead, a unique range of scales between the end of one image-object, and thebeginning of another, that is composed of integrated‘edge’ pixels. We refer to the species of objects thatpopulate this ‘edge-space’ as edge-objects (EOs), andsuggest that an example of their signal is illustrated inFigure 5, between A–B, C–D, and E–F.
Conceptually, EOs exist within a varying range of scales located on the ‘other-side’ of discrete image-object frontiers or boundaries, but due to their digital
-
8/9/2019 2002 Hay LSE Full
15/20
485
nature 6 they actually share part of their spectral com-position with a non-linear integrated fraction of theedge pixels they abut. As a consequence, EOs willalways be L-res which means they will be representedby relatively large V I and A I measures, as they areunable to be dened within the range of scales com-
monly used to assess image-objects (see Figure 7). Forexample, during OSA 1 , visual and statistical outputgenerated at each increment in window size indicatedthat 99% of O I was processed within a window size of 29 × 29. Yet the remaining 1% required analysis up toa window size of 63 × 63. In addition, this 1% of pix-els did not visually correspond to spatially meaningfulimage-objects within O I . Instead, they representededge locations between recognizable IOs. A similartrend was found in all additional iterations throughoutthe OSA process.
To ensure that spatially dominant image-objectswill emerge through multiscale analysis, rather thanEOs, we conrm that inverse area values (which fa-vor image-objects) are used to dene all OSU weights.And yet, EOs appear to spatially dominate at coarsergrain sizes, rather than recognizable image-objects(see Figure 7). We suggest two plausible solutionsfor this condition. Either EOs represent real land-scape structure(s), or they are artifacts resulting frominappropriate OSA heuristics.
Strong support that OSA heuristics work well onrecognizable image-objects is provided by SD 0 inFigure 7, where individual tree crowns, road edges,canopy gaps, and barren areas have been explicitly
delineated. When these results are considered in re-lation to the evaluation conducted during heuristicdevelopment, we are condent that the heuristics work well. The second solution is that EOs are actuallyimage-objects that represent real multiscale landscapestructure that we may not be familiar with from asingle-scale perspective.
If edge-objects (EOs) are real, what landscape phenomenon do they model?
As Wu and Qi (2000) point out, it is not always clearwhether the effect of changing scale is an artifact dueto the improper use of analytical methods, an indica-tion of the scale multiplicity of ecological systems, orneither of the two. If for a moment we consider that
6Within a digital scene, an image-edge or threshold is not a 1D-linecomposed of zero-dimensional points lying between two or morepixels, but rather a 3D pixel (i.e., x, y, DN) that must exist in thesame location as one of the points it is trying to segregate.
EOs are real landscape entities rather than image ar-tifacts, what do they structurally represent? By theirvery nature, we know that they are not image-objectswith obvious real-world counterparts, if they were, wewould recognize them. Obviously we need to evaluateEOs with a different conceptual perspective. What we
do know is that EOs exist in the ‘edge-space’ betweenimage-objects. Visual analysis of Figure 7 reveals aspatial evolution of increasing perimeter for C.Cut,gravel-road, and barren-ground, that extends far be-yond their initial physical boundaries (see Figure 4a).When these changes are considered in relation to thescale-dependent manner in which OSA functions, itis highly plausible that the evolution of EOs modelsthe scale-dependent change(s) occurring at, or within,ecotones .
Although the study of ecotones is complicated bythe diversity of interpretation regarding their nature,we adopt the denition of Holland (1988), where thetransition zone between adjacent patches is recognizedas an ecotone. In OSA, image-objects correspond toscale-dependent patches within a landscape mosaic,thus EOs correspond to their ecotones. A seriouschallenge with ecotone detection is the subjectivityinherent with identifying boundaries along graduallychanging ecolines. Here the difculty involves divid-ing a zone of ‘continuous’ variation into compart-ments. As Johnson et al. (1992) indicate, even whenstatistically signicant differences exist between indi-vidual compartments, the boundaries between themmay not represent true ecotones. Instead, ecotones
span the range between these two extremes. In addi-tion, boundary distinctness is scale dependent, thususers are also faced with the subjectivity of determin-ing the most appropriate scale to assess the scene,which in turn effects the delineation of ecotones.
One of the true benets of imaging spectrome-try is the ability to explicitly link specic spectralcharacteristics with physiological properties (Wess-man et al. 1989). If the idea of EOs as ecotones islinked with the spectral characteristics of the originalCASI image (i.e., a surrogate measure of vegetative‘greenness’) it is further plausible to hypothesize thatEOs dened in O I may be a visual analogue of whatis referred to as ‘ depth-of-edge inuence ’, or ‘edgewidth ’ (Chen 1999). Depth-of-edge inuence is asso-ciated with microclimatic zones across abrupt edgesin the landscape, and can result in broad areas of edge inuence, which constitute a signicant portionof (unaccounted) fragmentation in a landscape. Thephenomenon varies over time and with edge charac-
-
8/9/2019 2002 Hay LSE Full
16/20
486
teristics, and can extend four to six tree heights intothe forest from a recent clear-cut edge. Notably, edge-width value varies according to different tree species,ranging from 60 m in Eastern Red Pine/White Pine toover 400 m in Pacic N.W. Douglas-r forests (Chen1999). This ‘EO = edge-width’ hypothesis is further
supported by the fact that O I is a high-resolution sceneof a (then) recently clear-cut site on southern Van-couver Island, where the dominant tree species in allthree-forest classes (Mature, Young and Juvenile) arePacic N.W. (Coastal) Douglas Fir. However, it isimportant to note that no microclimate data were avail-able to corroborate this hypothesis. Nevertheless, thisprovides an excellent example of how object-specicanalysis offers new insight into linking and question-ing the relationships between landscape processes andmultiscale landscape patterns, that may not have beenpossible without such a multiscale perspective.
Can an OSA perspective be used to denelandscape-scale thresholds?
Through the iterative OSA and OSU process, the pat-terns generated within a SDS represent an evolution of image-objects from small-scale entities such as indi-vidual tree-crowns, to larger ‘landscape’ sized objectsthat will eventually dominate the entire image. Fromthe results in Figure 7 it is clear that between SD 1and SD 2 , recognizable image-objects stopped beinggenerated, and unfamiliar EOs began to emerge anddominate the scene. We suggest that this change in
spatial dominance, from image-objects to EOs, cor-responds to crossing a landscape-scale threshold, andthat it can be dened in a similar fashion as individualimage-object thresholds.
Recall that when applying OSA to detect object-specic thresholds, each pixel is evaluated as partof an individual image-object. Therefore, to detect alandscape-scale threshold within an OSA framework,all image-objects and EOs within a scene are evaluatedas being part of a larger scene-object (i.e., a landscape-scale threshold-object) that spatially dominates theentire image/landscape being assessed. This is op-erationalized by evaluating the total scene variance(TSV) for each image in a nested hierarchy, whereeach image represents the same study area, but at adifferent grain size. The resulting signal is then plot-ted, and modeled revealing distinct saddles and peaks,which correspond to the beginning and end scales of landscape-scale threshold-objects. Essentially this isscale variance analysis as described earlier, except
that within an OSA framework, the nested hierarchycorresponds to image-sets generated at each OSA iter-ation, and images representing different grain sizes aregenerated only at odd-numbered iterations (except forOSA 1 ). In addition, TSV is dened for each variance-image rather than each mean-image as object-specic
structures are explicitly dened in V I, while in M Isuch structures are smoothed. In simple terms, theseprocedures correspond to evaluating the total differ-ence in the variation resulting from the individualimage-objects composing a scene through all possibleobject-specic scales of analysis.
To better understand the total scene varianceand corresponding scene/landscape structure throughscale, TSV values generated for each VI at odd num-bered iterations 7 are modeled with a high order poly-nomial ( R 2 = 0.999), and the resulting curve [Poly.(TSV)] is illustrated in Figure 9. We note that whilethe shape of this cure is similar to that found in Fig-ure 5, it must be assessed with caution past iteration8, as OSA 8− 10 kernels required analysis over largerwindow sizes than the available image dimensions.This indicates that the pixels being assessed were partof a larger-scale image-object that existed beyond theextent dened by the image. Visual analysis of Poly.(TSV) reveals a saddle at iteration 3 and a peak at iter-ation 6 indicating the beginning and end range of therst landscape-scale threshold-object. It is also pos-sible that another landscape scale threshold begins ator after OSA 11 . Recall from Table 2, that OSA 3− 4are members of SD 1 . When compared with the re-
sults in Figure 7, the rst landscape-sized thresholdcorresponds explicitly to the visual changes betweenSD 1 and SD 2 , supporting the idea that OSA can beused to evaluate a full-range of landscape thresholdsranging from small-scale image-objects to large-scalelandscape structures.
Conclusion
From a multiscale perspective a scale-domain set maybe visualized as a hierarchical scaling ladder (Wu1999), and each SD n may be visualized as an in-dividual rung, separated by unequal spaces that arespecic to the range of scales assessed within the IStthat composes it. Alternatively, since Figure 9 sup-ports the detection of landscape-thresholds between
7 We note that values generated at even-numbered iterations pro-duced a very similar curve, transposed by one iteration in thex-axis.
-
8/9/2019 2002 Hay LSE Full
17/20
487
Figure 9. Total Scene Variance (TSV) dened at odd-numbered object-specic analysis (OSA) iterations. Poly.(TSV) represents TSV valuesmodeled by a high order polynomial curve ( R 2 = 0.999) that is similar to the curve illustrated in Figure 5.
adjacent SD n , it may be more reasonable to includeSD n as a subset of a higher-order set we refer toas a landscape-threshold-domain (LTD v), where thesubscript (v) represents the number of different land-scape thresholds dened by TSV within the SDS. Thusequation 4 should be augmented as follows:
Pij ∈ IO s ∈ IS t ∈ SD n ∈ LTD v ∈ SDS (5)
As a result, it may be more appropriate to con-
sider the landscape represented by a linked group of different sized scaling ladders, where each ladder cor-responds to a specic LTD v , rather than a single hier-archical scaling ladder as Wu (1999) suggests. Thoughoriginating from different starting points, we suggestthat a multiscale OSA and OSU approach providesa methodological framework that is complimentaryto the described theory, and techniques required bythe Hierarchical Patch Dynamics Paradigm (HPDP)(Wu and Loucks 1995). HPDP provides a link be-tween the patch dynamic perspectives and hierarchytheory that emphasizesmultiscale properties of patternand process dynamics in ecological systems. In thisparadigm, individual patches are considered the fun-damental structural and functional units. In OSA theseprimitives correspond to image-objects, whose spatialdimensions and inuence can be dened and aggre-gated to unique coarser scales (i.e., OSU), speciedby the dominant entities (A I) composing a scene.
If at multiple image scales, the spatial extent of dominant A I patterns strongly corresponds to geo-graphic areas over which known processes are dom-inant (i.e., soils, slope, aspect), these areas may beselected as locations over which scale-dependent eco-logical models could be developed, or data explicitlytranslated to and from (Holling 1992). King (1990)identies four general methods of translating ecolog-ical models to larger scales: (1) lumping, (2) direct
extrapolation, (3) extrapolationby expected value, and(4) explicit integration. In particular, direct extrap-olation could benet from OSA because it involvesexplicitly running a small-scale model for a set of dis-crete elements, scaling the output of each element bythe area represented, then combining the outputs torepresent the large-scale system.
If we consider that the OSA and OSU heuristicsare sufciently robust, and that MAUP effects are min-imized – through adopting an entity, or object-specicapproach – then the complex patterns forming at eachOSA iteration represent the emergence of real worldstructures existing, or imbedded at different scaleswithin a single scale of imagery. Good reason existsto consider this a sound supposition, as (V I) and (A I)strongly correspond to real world scene-components,thus the heuristics dening image-object thresholdsare being met. As threshold patterns emerge at eachiteration, and their specic resolutions and extents aredened, the ideal situation would be for remote sens-
-
8/9/2019 2002 Hay LSE Full
18/20
488
ing data – representing surrogate ecological measures[such as leaf area index (LAI), or fraction of photosyn-thetically active radiation, (FPAR)] – to be scaled withOSU and used as inputs into unique ecological mod-els operating over the spatial extents dened by thecorresponding A I (Freidl 1997). Alternatively, model
development and data type selection could be guidedby the OSA scale-domains and landscape thresholdpatterns generated. If iterated OSA and OSU resultscorrespond to eld data over a range of known scales,precedent exits upon which to assess OSA and OSUresults at coarser unveriable image scales. At present,object topology is not embedded within the analyzingroutines, but it is envisioned in subsequent versions,which will provide multiscale image-object output foruse in geographic information systems.
In this paper we introduce a multiscale framework for analysis and upscaling that when applied to remotesensing imagery reduces the effects of MAUP by in-corporating an object-specic approach. By consider-ing landscapes as hierarchical structures and adoptingthis multiscale framework, the patterns of landscapeobjects operating at, and over, unique spatial scalesmay be thematically and numerically quantied bytheir spatial dominance. While aware that the enti-ties that emerge in a data set are scaled by virtue of the observation protocol and the lters applied to thedata during analysis, we suggest that multiscale OSAand OSU offers a potentially powerful framework forimproved understanding of scale-specic landscapepatterns. In particular, multiscale OSA may assist
in dening critical landscape thresholds, domains of scale, ecotone boundaries, and the grain and extentat which scale-dependent ecological models could bedeveloped and applied.
This paper provides only a small sample of thepotential of multiscale OSA tested over a relativelyne geographic area. The next step is to apply theseideas over a larger-extent ne-grained scene, wheresufcient ancillary data exist so that results may befully veried over numerous spatial scales. To facili-tate this, analysis is presently underway in the complexagro-forested Haut-Saint-Laurent region of Quebec toexamine how landscape fragmentation and connected-ness change through scale, and what their implicationsare for landscape management (Bouchard and Domon1997; Pan et al. 2000). Our primary objective willbe to apply the described object-specic framework to H-res Ikonos satellite data (acquired in September,2000) that represents an 11 km × 11 km scene, andevaluate the multiscale results against a database rep-
resenting more than 15 consecutive years of intensiveeld studies and research.
Acknowledgements
This work has been supported by a Biology gradu-ate scholarship of excellence from the University of Montréal and a GREFi Ph.D. Scholarship awardedto Mr Hay, by the Ministry of Natural ResourcesCanada through its Human Resources Planning andTraining Program, and by a team grant awarded toDr A. Bouchard and Dr D. Marceau from FCAR,Gouvernement du Québec. We also express appreci-ation to Forestry Canada for the CASI imagery, DrMarie Josée-Fortin for her assistance with algorithmnotation, and to three anonymous referees for theirconstructive comments.
References
Allen, T.F.H. and Hoekstra, T.W. 1991. Role of heterogeneity inscaling of ecological systems under analysis. In Ecological Stud-ies 86: Ecological Heterogeneity. pp. 47–68. Edited by J. Kolasaand S.T.A. Pickett, Springer-Verlag.
Allen, T.F.H. and Starr, T.B. 1982. Hierarchy Perspective forEcological Complexity. University of Chicago Press, Chicago,310 pp.
Amrhein, C. and Reynolds, H. 1996. Using spatial statistics toassess aggregation effects. Geogr. Syst.3: 143–158.
Benson, B.J. and MacKenzie, M.D. 1995. Effects of sensor spatialresolution on landscape structure parameters, Landscape Ecol.10: 113–120.
Bian, L. and Walsh, S.J. 1993. Scale dependencies of vegetationand topography in a mountainous environment of Montana, TheProfessional Geographer 45: 1–11.
Bouchard, A. and Domon, G. 1997. The transformation of thenatural landscapes of the Haut-Saint-Laurent (Québec) and itsimplication on future resources management. Landscape UrbanPlan. 37: 99–107.
Caldwell, M.M., Matson, P.A., Wessman, C. and Gamon, J. 1993.Prospects for scaling, in Scaling Physiological Processes: Leaf to Globe. pp. 223–230. Academic Press.
Chen. J, Saunders, S.C., Crow, T.R., Naiman, R.J. 1999. Microcli-mate in forest Ecosystems and Landscape Ecology. Bioscience49: 288–297.
Coveney, P. and Higheld, R. 1991. The Arrow of Time. FlamingoPress, London, 378 pp.
Cullinan, V.I., Simmons, M.A. and Thomas, J.M. 1997. A bayesiantest of hierarchy theory: scaling up variability in plant cover fromeld to remotely sensed data. Landscape Ecol. 12: 273–285.
Curran, P.J. and Atkinson, P.M. 1998. Geostatistics and RemoteSensing. Progr. Phys. Geogr. 22: 61–78.
DeFries, R.S., Townshend, J.R. and Los, S.O. 1997. Scalingland cover heterogeneity for global atmosphere-biosphere mod-els. pp. 231–246. In Scale in Remote Sensing and GIS, LewisPublishers.
-
8/9/2019 2002 Hay LSE Full
19/20
-
8/9/2019 2002 Hay LSE Full
20/20
490
Townsend, P.A. 2000. A Quantitative Fuzzy Approach to AssessMapped Vegetation Classications for Ecological Applications.Remote Sensing of Environ. 72: 253–267.
Treitz, P. and Howarth. P. 2000. High Spatial Resolution RemoteSensing Data for Forest Ecosystem Classication: An Examina-tion of Spatial Scale. Remote Sensing Environ. 72: 268–289.
Turner, S.J., O’Neill, R.V., Conley, W., Conley, M.R. andHumphries, H.C. 1991. Pattern and Scale: Statistics for Land-scape Ecology. In Quantitative Methods in Landscape Ecology.pp. 19–49. Springer Verlag.
Ustin, S.L., Smith, M.O. and Adams, J.B. 1993. Remote sensingof ecological processes: A strategy for developing and testingecological models using spectral mixture analysis. In ScalingPhysiological Processes: Leaf to Globe. pp. 339–357. AcademicPress.
Walsh, S.J., Moody, A., Allen, T.R. and Brown, D.G. 1997. Scaledependence of NDVI and its relationship to mountainous terrain. In Scale in Remote Sensing and GIS, Lewis Publishers pp. 27–55.
Wessman, C.A., Aber, J.D. and Peterson, D.L. 1989. An evaluationof imaging spectrometry for estimating forest canopy chemistry.Int. J. Remote Sensing 10: 1293–1316.
Wiens, J.A. 1989. Spatial scaling in ecology. Functional Ecol. 3:385–397.
Woodcock, C.E. and Strahler, 1987. The factor of scale in remotesensing. Remote Sensing Environ. 21: 311–332.
Wu, J. 1999. Hierarchy and Scaling: Extrapolating InformationAlong A Scaling Ladder. Can. J. Remote Sensing 25: 367–380.
Wu, J. and Loucks, O.L. 1995. From balance of nature to hierar-chical patch dynamics: a paradigm shift in ecology. Quater. Rev.Biol. 70: 439–466.
Wu, J. and Qi, Y. (in press). Dealing with scale in landscapeanalysis: An overview. Geogr. Inform. Sci., 6: 1–5.
Wu, J., Jelinski, D. E., Luck, M. and Tueller, P.T. (in press). Multi-scale Analysis of Landscape Heterogeneity: Scale Variance andPattern Metrics. Geogr. Inform. Sci., 6: 6–19.