Estudio del estado del arte de los métodos de estimación ...
Upload
alexander-primoCategory
view
10download
0description

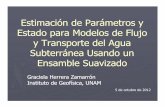
Estimación de estado de un Sistema Eléctrico de
Potencia

Sistemas de Potencia II Estimación
de estado
Mediciones
Filtracion
Estimacion deEstado
Topologia de lared
Pronostico decarga en la barra
Modelamientoexterno de la red
Flujo de carga enlinea
Evaluacion deContingencia
Seleccion deContingencia
verificacion delimites
Procesamiento dedatos erroneos
Analisis deObservabilidad
Estadonormal
Estadoemergencia
Estadorestauracion

Estimación de Estado.Introducción.
El control efectivo en los sistemas de generación y transmisión provee datos necesariospara el control de frecuencia en la carga y el despacho económico.
Ante la complejidad actual de las redes de potencia se ha hecho mas difícil operar conseguridad el sistema, por tal motivo los centros de control han instalado controlessupervisores mas extensos y sistemas de adquisición de datos (SCADA), y junto con losprogramas computacionales de los centro de control, se puede asegurar la operacióneconómica del sistema y se puede evaluar que tan seguro es el sistema si falla el equipo ysi salen algunas de las lineas de transmisión.
Mediciones en tiempo real.
Flujos de potencia activa y reactiva en las lineas. Inyecciones de potencia activa y reactiva en la barras. Tensiones en las barras. Corriente de linea. Posición de taps en los transformadores.

Errores en los datos
Fallas en las mediciones o en los equipos de telemetría. Errores en los instrumentos de medida. Ruidos en los sistemas de comunicación. Retardos en la transmisión de datos.
Estimación de estado.
Estimación de estado es un procedimiento matemático para calcular la estimaciónóptima de las variables de estado (tensión y ángulos), de un sistema de potencia basadoen datos ruidosos. Otras cantidades pueden ser fácilmente obtenidos de las variables deestado.
Beneficios de estimación de estado.
Miniminiza las unidades de estación remotas (RTU) y transductores. Detección e identificación de datos erróneos.

Estimación de estado de un sistema eléctrico
• La supervisión de los sistemas de generación y transmisión provee los datos necesarios para el despacho económico y el control de frecuencia.
• Las compañías de transmisión instalan controles de supervisión y sistemas de adquisición de datos (SCADA) a través de la red para apoyar a los programas computacionales del centro de control.
• El banco de datos que se crea se utiliza en programas de aplicación como por ejemplo de operación económica.
• Antes de que se haga cualquier evaluación, se debe determinar un estimado confiable del estado existente del sistema.

Estimación de estado de un sistema eléctrico
• Para estimar el estado de un sistema no se restringe las mediciones físicas a las cantidades requeridas que se usan para un programa de flujos de potencia.– En un programa de flujo de potencia solo se necesita la potencia
de las cargas y las tensiones y potencias activas en la generación.– Si alguno de estas magnitudes es medida erróneamente, los flujos
determinados serian incorrectos, dando una mala estimación sobre el estado del sistema.
• En la practica, se tienen otras cantidades disponibles como P y Q de los flujo de las líneas, sin embargo estas no se pueden usar en un programa convencional de flujos de potencia.

Estimación de estado de un sistema eléctrico
• Las limitaciones anteriores se pueden eliminar a través de la estimación de estado basada en los cálculos de mínimos cuadrados ponderados.
• Las técnicas desarrolladas dan un buen estimado del sistema y una medida de que tan bueno es el estimado.
• Los errores inevitables en las mediciones tienen propiedades estadísticas y los estimados de los estados se someten a pruebas estadísticas antes de ser aceptados como satisfactorios.

Sistemas de Potencia II Estimación
de estado
•Caso simple DC:Z1 Z2
Z3 Z4

Sistemas de Potencia II Estimación
de estado
• Ecuaciones del circuito:
X1=V1 X2=V2
Error de mediciones
Valores medidos reales

Sistemas de Potencia II Estimación
de estado
Matriz mediciones
reales
Matriz que modela la red Matriz de
errores

Sistemas de Potencia II Estimación
de estado
• Método de mínimos cuadrados
w= factor de ponderación ( instrumento )
•Objetivo:Minimizar función suma ponderada de cuadrados
Ojo : se trabaja con valores estimados !!!!

Sistemas de Potencia II Estimación
de estado
• Valores estimados
Error estimado
Medición estimada

Sistemas de Potencia II Estimación
de estado
• Minimizando :

Sistemas de Potencia II Estimación
de estado

Sistemas de Potencia II Estimación
de estado
Sea matriz de ganancia como:

Ejemplo Estimación
Iowa

I1 I2
● ●
●
A1
A2
A3
V
e
+ -
- +
R1
R2 R3
Node 1 Node 2
Node 3
•meter A1: i1,2=1.0 Ampere•meter A2: i3,1=-3.2 Ampere•meter A3: i2,3=0.8 Ampere•meter V: e=1.1 volt
current injections I1, I2, and voltage E are unknown. Let R1=R2=R3=1.0 Ω.

0.11 21
212,1
evvevvim
2.31
01
11,3
vvim
8.01
02
23,2
vvim
1.1e
1.18.02.3
0.1
100010001111
2
1
evv
in matrix form:

Let’s A, x, and b, so:
bxA
1.18.02.3
0.1
b
evv
xA 2
1
100010001111

evvevv
evv
xAb
1.18.02.3
0.1
100010001111
1.18.02.3
0.1
2
1
21
2
1
2
22
21
221
1.18.02.3
0.1
evvevv
222
21
221 1.18.02.30.1 evvevv
xAbxAb T
xAbxAbJ T 21

xAxAxAbbxAbb
xAbxAbxAbxAbJ
TTTT
TTT
21
21
21
(Ax)T=xTAT,
xAAxxAbbAxbbJ TTTTTT 21
xAAbAxAAbAxAAbAbAxJ TTTTTTT
22
212
21
0 xAAbAxJ TT
xAAbA TT
bAAAx TT 1

AAG T
TTTI AGAAAA 11
bAbAGbAAAx ITTT 11
211121112
100010001111
100101010011
AAG T
311131
113
411G
31111311
1131
41
100101010011
311131
113
411 TI AGA

175.1875.0125.3
1.18.02.3
0.1
31111311
1131
41bAx I
075.0075.0075.0075.0
175.1875.0125.3
075.1
1.18.02.3
0.1
175.1875.0125.3
100010001111
1.18.02.3
0.1
100010001111
1.18.02.3
0.1
2
1
evv
xAb
Ax

Sistemas de Potencia II Estimación
de estado
• Datos erróneos:• Función ji-cuadrada
DATOS ERRONEOS

Sistemas de Potencia II Estimación
de estado
• Nm = # mediciones
• Ns = # variables de estado
• = Probabilidad específica
Si:
Si:
Datos aceptables!!
Existen datos erróneos!!!
Grados de libertad

Sistemas de Potencia II Estimación
de estado

Sistemas de Potencia II Estimación
de estado
• Estimación de estado: sistema de potencia

Sistemas de Potencia II Estimación
de estado

Sistemas de Potencia II Estimación
de estado
• Formulación del problema:

Sistemas de Potencia II Estimación
de estado
• Matriz de ponderaciones :

Sistemas de Potencia II Estimación
de estado
• Para minimizar la función :

Elementos de la Estimación de Estado

Elementos de estimación de estado .
Modelo del sistema. Estimación de las variables de estado. Detección e identificación de los datos erróneos. Observabilidad y ubicación de instrumentos
M odelo del sistema.
Z : Medidas.X : Variables de estado.H : Relación matemática entre las variables medidas y las variables de estado (topología dela red).e : error.
Z = H(X) + e .E[e] = 0 E : esperanza
2n
22
21
000
...0..
0......00
0......00
RE Tee , Matriz de covarianza

Para mayor 2, entonces menor confiabilidad en la medida.
Nº de medidas > Nº de variables de estado.
La redundancia debería ser distribuida para mejorar la observabilidad de la red.
Observabilidad de la red.
¿ Existe suficientes medidas para hacer posible la estimación de estado?(Observabilidad de la red)
Si no es así ¿ qué parte o partes de la red, sus variables de estado pueden aun serestimados?
(Islas observables). ¿ Qué mediciones adicionales deben incluirse para hacer posible la estimación de
estado de todo el sistema?( Ubicación de instrumentos)
¿Si las mediciones adicionales no son reales, cómo garantizamos que esas medidas nocontaminen los resultados obtenidos?
Métodos de Análisis de observabilidad.- Combinatoria. (Teoría gráfica)- Factorización triangular de la matriz de ganancia.

Sistema no observable.
Un sistema es no observable, cuando no se puede estimar sus variables.
El sistema no observable ocurre cuando no cumple con el criterio matemático(Nº de medidas < Nº de variables) y por lo tanto no existe suficiente redundancia demediciones para determinar el estado del sistema.
La solución en el caso de no observabilidad es entonces el incremento del numero demediciones, pero esto trae consigo problemas de costo, debido a que aumentariamosel numero de equipos de medición como RTU´s, infraestructura de comunicación ysoftware para los procesamiento de datos.
Otra solución, es aumentando a los equipos de mediciones con seudomediciones paraalcanzar la condición de observabilidad para la red. (logramos alcanzar el criteriomatemático).

Método de solución

Calculo matemático.
Método de mínimos cuadrados.
Tenemos:
Z = Hx + eZ : valor medidoHx : valor real.e : errorH: Relación matemática de la red.x : Variable de estado.
Entonces: e = Z – Hx
Tanto Z, como x, son matrices columna donde la dimensión de Z es mayor que la de x
Sea: J(x) =
n
1j
2jje donde:
jj
1
n : numero total de mediciones.j: elemento de la matriz covarianza

M i n i m i z a n d o l a f u n c i ó n J ( x ) :
0x
)x(JX
j
0xee......
xee
xee2
x)x(J
..
..
0xee......
xee
xee2
x)x(J
Xn
nnn
n
222
n
111
n
X1
nnn
1
222
1
111
1
D e l a e c u a c i ó n a n t e r i o r :
n
2
1
n
2
1
nnn4n3n2n1
2n42322212
1n41312111
e.ee
.h....hhhh
.h....hhhhh.....hhhh

E n f o r m a c o m p a c t a :
[ H ] t [ ] [ ê ] = [ H ] t [ ] [ Z - xH ] = 0R e s o l v i e n d o :
ZHGx t1 t a l q u e [ G ] = [ H ] t [ ] [ H ] x : V a l o r e s t i m a d o .
S u s t i t u y e n d o Z = H x + e
eHGxx
..... .xx
xxx t1
11
11
E l n u e v o v a l o r s e r á :kk1k xxx
N o t a : S i G e s m a t r i z s i n g u l a r , e n t o n c e s e l s i s t e m a e s n o o b s e r v a b l e .

E j e m p lo n u m é r i c o :
S e a e l s ig u ie n t e S E P :
D a t o s d e la s m e d ic io n e s :
T ip o d e m e d ic ió n U b ic a c ió n d e l am e d id a
V a lo r e s m e d id o s( p . u )
V a lo r e s d e lac o v a r ia n z a ( )
VVVPQPQ
B u s 1B u s 2B u s 3
B u s 1 – B u s 2B u s 1 – B u s 2B u s 1 – B u s 3B u s 2 – B u s 3
1 . 0 21 . 0
0 . 9 91 . 50 . 21 . 00 . 1
0 . 0 50 . 0 50 . 0 50 . 10 . 10 . 10 . 1
Bus 1 Bus 2
Bus 3
-j10
-j7-j5

L a s v a r ia b le s d e e s t a d o so n :
3
2
1
3
2
VVVx
L a m a t r iz d e c o v a r ia n z a R :
2
2
2
2
2
2
2
2i
1.0000000
01.000000
001.00000
0001.0000
000005.000
0000005.00
00000005.0
R

E l v a l o r v e r d a d e r o H x :
[ H ] [ x ] =
)xxcos(xx5x5
sinxxx7xcosxx10x10
sinxxx10xxx
215424
253
14323
143
5
4
3
H a l l a n d o l a m a t r i z j a c o b i a n a p a r a f l u j o d e p o t e n c i a :
)xxcos(x5)xxcos(x5x100)xx(sinxx5)xxcos(xx5xcosx70xsenx7xcosxx70
0xcosx10xcosx10x200xsenxx100xcosx10xcosx100xcosxx10
100000100000100
xH
214215421542154
2325253
13143143
1314143

El valor inicial:
99.000.102.1
00
x
x
x
x
x
05
04
03
02
01
Aplicando las formulas para hallar el valor estimado, se tiene:
Primer valor:
984.0003.1022.1142.0147.0
x
x
x
x
x
15
14
13
12
11

operando hasta la cuarta iteración obtenemos:
987.0007.1016.1143.0147.0
x
x
x
x
x
5
4
3
2
1
Usando los voltajes y ángulos hallados de este proceso de estimación podemos calcular losflujos de potencia en las lineas y las inyecciones en las barras.
Nótese que el proceso de estimación de estado resulta en el estado del sistema, justocuando se ejecuta el flujo de potencia pero sin saber de antemano las inyecciones depotencia en las barras.