6. Pruebas de los algoritmosbibing.us.es/proyectos/abreproy/4459/fichero/Memoria%2F6.Pruebas+… ·...
38
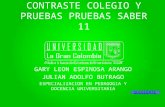
‐ 40 ‐ Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte 6. Pruebas de los algoritmos 6.1. Pruebas del algoritmo centralizado. 6.1.1.- Elección de la ruta de menor coste 1.- Topología de la red La red utilizada es la que se muestra en la Figura 8. Se trata de una red con una bifurcación en su parte central. Las dos ramas tienen exactamente la misma capacidad pero distinto coste. Figura 8: Red para la prueba de elección de la ruta de menor coste 2.- Objetivo de la prueba Esta prueba está diseñada para demostrar como el algoritmo centralizado elige la ruta de menor coste entre dos posibles rutas de igual capacidad. En esta red, la única diferencia entre las dos rutas es el coste y, como se observa, el flujo de material sólo puede viajar por dos rutas, una de las cuales (1-3-4) tiene un coste superior a la otra. 3.- Descripción de los elementos de la prueba Para comprobar que el algoritmo tiene un funcionamiento correcto primero se le pedirá a la red una demanda constante de 4 unidades de producto durante 30 instantes de muestreo. Seguidamente se aumentará esa
Transcript of 6. Pruebas de los algoritmosbibing.us.es/proyectos/abreproy/4459/fichero/Memoria%2F6.Pruebas+… ·...

‐ 40 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
6. Pruebas de los algoritmos
6.1. Pruebas del algoritmo centralizado.
6.1.1.- Elección de la ruta de menor coste
1.- Topología de la red
La red utilizada es la que se muestra en la Figura 8. Se trata de una red
con una bifurcación en su parte central. Las dos ramas tienen exactamente la
misma capacidad pero distinto coste.
Figura 8: Red para la prueba de elección de la ruta de menor coste
2.- Objetivo de la prueba
Esta prueba está diseñada para demostrar como el algoritmo
centralizado elige la ruta de menor coste entre dos posibles rutas de igual
capacidad. En esta red, la única diferencia entre las dos rutas es el coste y,
como se observa, el flujo de material sólo puede viajar por dos rutas, una de las
cuales (1-3-4) tiene un coste superior a la otra.
3.- Descripción de los elementos de la prueba
Para comprobar que el algoritmo tiene un funcionamiento correcto
primero se le pedirá a la red una demanda constante de 4 unidades de
producto durante 30 instantes de muestreo. Seguidamente se aumentará esa

‐ 41 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
cantidad en 3 unidades más. Este vector de demandas se ha elegido con esta
estructura particular para comprobar que el flujo se dirige primero por la ruta de
menor coste y una vez que se ha alcanzado el límite de esa ruta, el flujo se
dirige por la otra ruta. En cuanto al horizonte de predicción, en esta prueba no
se pretende estudiar el comportamiento predictivo del algoritmo, por lo que se
mantendrá en un valor relativamente bajo, por ejemplo, 5.
4.- Resultados de la prueba.
Se representa el flujo de entradas y salidas en cada nodo. En la Figura 9
se representan las entradas y salidas del nodo así como el nivel del depósito.
Como se observa en la figura, mientras la demanda es de 4 unidades,
todo el flujo recorre la ruta 1-2-4; cuando la demanda aumenta a 7 unidades, el
flujo por 1-2-4 aumenta hasta alcanzar la capacidad máxima y el resto escoge
la ruta 1-3-4.
0 10 20 30 40 500
2
4
6
8entradas deposito
0 10 20 30 40 500
5
salidas depósito
0 20 40 60-1
0
1nivel deposito
p1
1213
Depósito 1
0 10 20 30 40 500
2
4
6
8entradas deposito
0 10 20 30 40 500
5
salidas depósito
0 20 40 60-1
0
1nivel deposito
12
24
Depósito 2
0 10 20 30 40 500
2
4
6
8entradas deposito
0 10 20 30 40 500
5
salidas depósito
0 20 40 60-1
0
1nivel deposito
13
34
Depósito 3
0 10 20 30 40 500
2
4
6
8entradas deposito
0 10 20 30 40 500
5
salidas depósito
0 20 40 60-1
0
1nivel deposito
2434
4e00
Depósito 4
Figura 9: Entradas, salidas y nivel de los depósitos en la prueba de elección de la ruta de menor coste

‐ 42 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
4.- Conclusiones
Analizando los resultados obtenidos se puede afirmar que el algoritmo
centralizado es capaz de discernir la ruta de menor coste entre dos rutas
posibles. El algoritmo ha elegido las acciones óptimas para esta red, desviando
flujo de productos por la rama de mayor coste únicamente cuando la capacidad
máxima de la tora rama fue alcanzada.
De estos resultados también se desprende que el algoritmo es capaz de
elegir el nodo productor de menor coste puesto que el coste de producción está
implícito como el coste de transporte por el arco que une cualquier nodo
productor con un nodo almacén.

‐ 43 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
6.1.2. Comportamiento predictivo. Respuesta a picos de demanda
1.- Topología de la red
La red utilizada se compone de una sola línea de producción con tres
depósitos, de tal forma que se separa claramente la producción de la demanda,
dejando un depósito intermedio. La red utilizada se puede observar en la Figura
10.
Figura 10: Red para la prueba de comportamiento predictivo
2.- Objetivo de la prueba
Mediante esta prueba se pretende demostrar el comportamiento
predictivo de la red y como es capaz de responder a picos de demanda. Se
realizarán diferentes simulaciones con diferentes valores del horizonte de
predicción para observar como varía la cantidad de producto no servido (la
holgura en el nodo demandante).
3.- Descripción de los elementos de la prueba
En primer lugar se deben describir los parámetros de la red. Se otorga
una producción máxima de 10 unidades de producto por instante de tiempo.
Como en este caso no se quiere evaluar ninguna característica relacionada con
los costes, todos los costes asociados a las variables serán de valor unitario.
En cuanto a las capacidades de los arcos, todas ellas serán de un valor lo
suficientemente grande para que en ningún caso actúen como factor limitante a
la hora de suministrar producto.
En este caso las capacidades y los costes de los almacenes si son
importantes puesto que de ellos dependerá en primer lugar el orden en el que
los almacenes se irán llenando y en segundo lugar a cuanta demanda por
encima de la capacidad máxima de producción se podrá hacer frente. Para que

Desagest
la c
capa
capa
actu
com
inicia
será
picos
red
sepa
En l
tiem
4.- R
depó
horiz
arrollo de utión de siste
característi
acidades
acidades m
ar como
pletamente
almente v
.
Por últim
á un vecto
s de dema
con picos
arados por
a Figura 1
po.
Figura
Resultados
A contin
ósito 2 ju
zonte de p
un entorno gemas interc
ca a estu
de almac
máximas a
almacén,
e indifere
vacios; es
mo queda
or constant
anda. Para
de dema
r una dista
1 se obse
a 11: Demand
s obtenidos
nuación se
unto con
redicción.
gráfico y deonectados d
udio qued
enamiento
cero) de t
resultand
ente para
decir, el
describir
te con tod
a observar
anda de 2
ancia sufici
rva una re
da utilizada p
s
e represen
el produc
‐ 44 ‐
e controladode transpor
e debidam
o en los
tal forma q
o en ese
a el resu
vector d
el vector
dos los va
bien la res
0, 30, 50,
ente para
epresentac
para la prueb
nta las en
to no ser
ores predictrte
mente res
depósitos
que solame
e momento
ultado. Lo
e las var
de la dem
alores nulo
spuesta de
70 y 100
que el sis
ción de la
ba de compor
tradas y l
rvido para
tivos para e
altada, se
1 y 3
ente el de
o el valor
os almac
riables de
manda; que
os excepto
el algoritmo
0 unidades
tema vuelv
demanda
rtamiento pre
as salidas
a diferente
el modelado
e anularán
(poniendo
pósito 2 p
r de su c
cenes est
estado in
e en este
o determin
o se excita
s de prod
va al equil
en función
edictivo
s y el nive
es valores
o y
n las
sus
ueda
coste
tarán
nicial
caso
ados
ará la
ucto,
ibrio.
n del
el del
s del

Desagest
Horiz
pred
serv
prod
arrollo de utión de siste
zonte de p
En este
dicción efe
vido es en
ducto que s
un entorno gemas interc
predicción
Fig
e caso al
ectiva. Tal
cada insta
se pueden
gráfico y deonectados d
Np=1
gura 12: Res
ser el ho
y como s
ante es igu
producir e
‐ 45 ‐
e controladode transpor
ultados obten
orizonte d
se observ
ual a la de
en cada ins
ores predictrte
nidos para Np
de predicc
a en la g
emanda m
stante.
tivos para e
p=1
ión igual
ráfica b, e
enos las 1
el modelado
a 1 no e
el product
10 unidade
o y
existe
to no
es de

Desagest
Hor
obse
Esto
ante
depó
dem
arrollo de utión de siste
rizonte de p
En este
erva, para
o se debe
elación. Ta
ósito evol
manda aum
un entorno gemas interc
predicción
Fig
e caso el h
los dos p
e a que l
ambién cab
uciona sie
ente la rea
gráfico y deonectados d
Np=3
gura 13: Res
horizonte d
rimeros pi
la red es
be destaca
empre de
acción de l
‐ 46 ‐
e controladode transpor
ultados obten
de predicci
cos, el tot
capaz de
ar que a p
e la mism
a red será
ores predictrte
nidos para Np
ón elegido
al de prod
e produci
partir del se
ma forma
á siempre la
tivos para e
p=3
o ha sido N
ducto no se
r con dos
egundo pi
puesto q
a misma.
el modelado
Np=3. Com
ervido es
s instantes
co, el nive
ue aunqu
o y
mo se
cero.
s de
el del
ue la

Desagest
dem
insta
prod
arrollo de utión de siste
Horizon
En este
mandas, pe
ante en e
ducto alma
un entorno gemas interc
te de pred
Fig
e caso, co
ro siempre
l que hay
cenado, ya
gráfico y deonectados d
dicción Np=
gura 14: Res
on Np=5, s
e procuran
ya que su
a que esto
‐ 47 ‐
e controladode transpor
=5
ultados obten
se empieza
do que el
ministrar e
o supondría
ores predictrte
nidos para Np
a a produ
nivel del d
el product
a un aume
tivos para e
p=5
cir antes
epósito au
to para ev
nto del cos
el modelado
para cubri
umente has
vitar que
ste.
o y
ir las
sta el
haya

Desagest
intro
para
este
satis
arrollo de utión de siste
Horizon
Para es
oduciendo
a evitar que
caso se
sfechos.
un entorno gemas interc
te de pred
Fig
sta simula
un mayor
e las accio
observa
gráfico y deonectados d
dicción Np=
gura 15: Resu
ción el ve
intervalo d
ones para h
que todo
‐ 48 ‐
e controladode transpor
=10
ultados obten
ector de d
de valores
hacer frent
os los pic
ores predictrte
nidos para Np
emanda tu
s nulos en
te a ambos
cos de de
tivos para e
=10
uvo que s
tre los dos
s picos se
emanda ha
el modelado
ser modific
s últimos p
mezclasen
an podido
o y
cado,
picos
n. En
o ser

‐ 49 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Conclusiones
A la vista de las gráficas obtenidas se pueden extraer las siguientes
conclusiones:
• A medida que se aumenta el horizonte de predicción se aumenta
también la capacidad de respuesta ante picos de demanda cada vez
más alta. Esto también es aplicable ante demandas que se prolonguen
en el tiempo con un valor que no pueda ser satisfecha de forma normal.
• El algoritmo, aunque detecta el aumento de demanda con mucha
antelación, es capaz de ajustar la producción de forma que no se
mantenga producto almacenado sin necesidad. (En posteriores pruebas
se demostrará que el algoritmo también es capaz de producir con
antelación y almacenar producto para hacer frente a determinadas
demandas)
• A pesar de las capacidades predictivas del algoritmo, en el caso de
seleccionar una demanda demasiado alta, el algoritmo no es capaz de
hacer frente a cualquier demanda a no ser que el horizonte de
predicción sea lo suficientemente alto. Sin embargo, a partir de
determinados valores de los tiempos de proceso se vuelven
demasiado elevados.

‐ 50 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
6.1.3.- Elección de almacenamiento de menor coste
1.- Topología de la red
Como se quiere comprobar que el algoritmo selecciona el depósito con
menor coste de almacenamiento se elige la red que se muestra en la Figura 16
con tres depósitos cuyos costes de almacenamiento serán coste lineales a
trozos.
Figura 16: Red utilizada para prueba de elección de almacenamiento de menor coste
En la Figura 16 el coste de almacenamiento de los depósitos viene
especificado como una letra C, que hace referencia a la recta de coste de la
Figura 17.
0 10 20 30 400
20
40
60
80
100
Cos
te to
tal
Unidades de producto
Figura 17: Coste de almacenamiento en los depósitos

‐ 51 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
2.- Objetivo de la prueba
Mediante esta prueba se pretende demostrar que el algoritmo
centralizado es capaz de seleccionar el almacén que supone un menor coste
de almacenamiento para la siguiente unidad de producto a almacenar. Esto
quiere decir que en cada instante se puede decidir y separar los flujos de tal
forma que el coste de almacenaje sea mínimo.
3.- Descripción de los elementos de la prueba
El algoritmo desarrollado sólo almacena producto cuando, gracias a la
característica de control predictivo, observa que va a haber un pico de
demanda o una demanda superior a la capacidad de producción en ese
instante. Por lo tanto, para observar la elección de almacenes que hace el
algoritmo se planteará una demanda con un pico de 100 unidades de producto.
La resolución del problema se hará con un horizonte de predicción lo
suficientemente grande como para que la demanda se pueda satisfacer y a la
vez varios depósitos se llenen hasta distintos niveles. En este caso se utilizará
10.
4.- Resultados obtenidos
En este caso se representan, además de los niveles de los depósitos
Figura 19, Figura 20 y Figura 21, la demanda y la producción en un mismo
gráfico (Figura 18), para observar la antelación con que la producción comienza
a producirse.

‐ 52 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 18: Demanda y producción para la prueba de
elección de almacenamiento de menor coste
Figura 19: Nivel depósito 1. Prueba de elección de
almacenamiento de menor coste
Figura 20: Nivel depósito 2. Prueba de elección de
almacenamiento de menor coste
Figura 21: Nivel depósito 3. Prueba de elección de
almacenamiento de menor coste
0 5 10 150
10
20Producción
0 5 10 150
50
100Demandas
3e
p1
0 5 10 150
10
20
30
40Nivel depósito 1
0 5 10 150
10
20
30
40Nivel depósito 2
0 5 10 150
10
20
30
40Nivel depósito 3

‐ 53 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
4.- Conclusiones
Cuando al algoritmo de control predictivo analiza la demanda futura y
prevé que no va a poder hacer frente a todo el pico de demanda indica a los
nodos productores (en este caso solamente hay uno) que comiencen a
producir. El exceso de producto con respecto a la demanda en ese instante se
va almacenando en el almacén de menor coste por unidad. Como se observa
en las Figura 19, Figura 20 y Figura 21, el nivel aumenta sucesivamente en
cada depósito hasta que en cada uno de ellos hay 10 unidades debido a que
las 10 primera unidades de producto que se almacenan en cada depósito
tienen un coste unitario de 1u.m./ud. Cuando los tres depósitos están llenos
hasta el primer nivel (10 unidades) se comienzan a llenar en el siguiente
“tramo” hasta que este se llena en los tres depósitos. Luego puede concluirse
que el algoritmo es capaz de seleccionar donde almacenar la siguiente unidad
de producto que es necesario almacenar seleccionando el menor coste.
La elección de que depósito debe tener prioridad cuando el coste es el
mismo depende de factores internos a la programación del optimizador glpk
(12) y escapa al control del algoritmo. Sin embargo, para el modelo actual de la
red la elección de uno u otro resulta irrelevante cuando las capacidades y los
costes de transporte desde los depósitos son idénticas.

‐ 54 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
6.1.4.- Prueba de funcionamiento general del algoritmo
1.- Topología de la red
La red utilizada en este caso es la mostrada en la
Figura 22. Se trata de una red de 8 nodos en la que las capacidades y
costes de los arcos de transporte han sido asignadas para permitir una
simulación en la que se den el mayor número de situaciones desfavorables
posibles.
2.- Objetivo de la prueba
Mediante esta prueba se pretende demostrar que el algoritmo
desarrollado es capaz de hacer frente a múltiples situaciones y que desarrolla
la solución óptima en todos los casos. Para ello se definirán unos vectores de
demanda que obliguen al algoritmo a utilizar toda la capacidad para resolver la
red. También se obligará a que en un determinado instante la demanda total
sea mayor que la capacidad de producción total, para observar como almacena
producto en función de donde va a ser necesario. El horizonte de predicción
utilizado es de 10 instantes de simulación.
Figura 22: Red utilizada en la prueba de
funcionamiento general del algoritmo

‐ 55 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
3.- Resultados obtenidos
En primer lugar se representa la demanda y la producción en un mismo
gráfico, diferenciando el origen de cada una de ellas (Figura 23).
Figura 23: Demandas y Producción para la prueba de funcionamiento general
0 10 20 30 40 50 600
5
10Produccion
0 10 20 30 40 50 600
5
10
15Demandas
4e6e7e8e
p1p1p2p3

‐ 56 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
A continuación se representa, en las Figura 24Figura 25, para cada
depósito, los flujos de entrada y salida así como sus correspondientes niveles a
lo largo de toda la simulación.
Figura 24: Flujos y niveles de los depósitos 1-4
0 10 20 30 40 500
5
10Entradas al depósito 1
0 10 20 30 40 500
5
10Salidas del depósito 1
0 10 20 30 40 500
5
10Nivel depósito 1
p1p1
1216
0 10 20 30 40 500
5
10Entradas al depósito 2
0 10 20 30 40 500
10
20Salidas del depósito 2
0 10 20 30 40 500
5
10Nivel depósito 2
p21232
2425
0 10 20 30 40 500
10
20Entradas al depósito 3
0 10 20 30 40 500
10
20Salidas del depósito 3
0 10 20 30 40 500
10
20Nivel depósito 3
p3
323538
0 10 20 30 40 500
10
20Entradas al depósito 4
0 10 20 30 40 500
10
Salidas del depósito 4
0 10 20 30 40 500
5
10Nivel depósito 4
24
4647484e00

‐ 57 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 25: Flujos y niveles de los depósitos 5-8
0 10 20 30 40 500
5
10Entradas al depósito 5
0 10 20 30 40 500
5
10Salidas del depósito 5
0 10 20 30 40 500
10
20Nivel depósito 5
2535
5758
0 10 20 30 40 500
5
10Entradas al depósito 6
0 10 20 30 40 500
10
Salidas del depósito 6
0 10 20 30 40 500
10
20
Nivel depósito 6
1646
676e00
0 10 20 30 40 500
5
10Entradas al depósito 7
0 10 20 30 40 500
10
Salidas del depósito 7
0 10 20 30 40 500
5
10Nivel depósito 7
475767
787e00
0 10 20 30 40 500
5
10Entradas al depósito 8
0 10 20 30 40 500
10
Salidas del depósito 8
0 10 20 30 40 500
10
20Nivel depósito 8
38485878
8e00

‐ 58 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
4.- Conclusiones
Como se observa en la figuras el algoritmo es capaz de resolver la red
de forma eficaz y obteniendo la solución óptima en todos los casos.
El algoritmo selecciona las rutas de menor coste para transportar el
producto, así como los depósitos donde almacenar el producto. Incluso es
capaz de dar durante 10 instantes una demanda superior a la capacidad de
producción máxima.

‐ 59 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
6.2. Limitaciones del algoritmo descentralizado
6.2.1.- Elección de la ruta de menor coste
1.- Topología de la red
La red utilizada es la que se muestra en la figura adjunta. Se trata de
una red con una bifurcación en su parte central. Las dos ramas tienen
exactamente la misma capacidad pero distinto coste.
2.- Objetivo de la prueba
Esta prueba se ha diseñado para resaltar uno de los principales defectos
del algoritmo descentralizado; que no es capaz de seleccionar la ruta de menor
coste puesto que la información sólo atraviesa la red en un sentido. En esta red
la ruta de menor coste es la ruta (1-3-4) con un coste total de 8. La otra ruta
posible (1-2-4) tiene un coste de 10. Sin embargo, como el tramo (2-4) tiene un
coste menor que el tramo (3-4) en la primera iteración cuando se resuelva la
red correspondiente al última nodo, el algoritmo optará por pedir primero por la
ruta superior aunque su coste total es mayor.
3.- Descripción de los elementos de la prueba
Como en el caso de la misma prueba para el algoritmo centralizado se
quiere demostrar si la solución ofrecida es óptima en el sentido de los costes

‐ 60 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
de transportes, por lo tanto se utilizará el mismo vector de demanda que en el
caso anterior. El vector será constante en dos tramos, durante los 30 primeros
instantes se le pedirá a la red 4 unidades de producto pasando en los 30
instantes siguientes a pedir 3 unidades más. Para el horizonte de predicción
como no influye significativamente en este caso se tomará un valor
relativamente bajo como 5.
4.- Resultados de la prueba.
En la Figura 26, se representarán las entradas y salidas de cada nodo,
pero sin representar el nivel de los depósitos puesto que al no superar la
demanda en ningún momento a la producción máxima el algoritmo no optará
por almacenar producto en ningún caso.

Desagest
4.- C
espe
elige
de m
y a
solu
tene
Figur
arrollo de utión de siste
Conclusion
Los res
erados seg
e la ruta d
menor cost
Esta ele
la vez una
ción desce
er en cuen
ra 26: Flujos
un entorno gemas interc
es
sultados q
gún la dem
e mayor c
e solamen
ección ejem
a de las p
entralizada
nta que la
de entrada y
gráfico y deonectados d
que se ha
manda y la
coste como
nte cuando
mplifica a
principales
a. Al resolv
s decision
salida para l
‐ 61 ‐
e controladode transpor
an obtenid
a red utiliz
o primera
la otra rut
la perfecc
dificultade
ver una red
nes individ
la prueba de descentral
ores predictrte
do para e
zada. El a
opción, m
ta está satu
ión uno de
es a la ho
d de forma
duales de
elección de laizado
tivos para e
este caso
algoritmo d
andando p
urada.
e los princ
ora de llev
descentra
cada uno
a ruta de men
el modelado
han sido
descentrali
producto p
ipales defe
var a cabo
alizada hay
o de los n
nor coste con
o y
o los
zado
por la
ectos
o una
y que
odos
n el algoritmo
o

‐ 62 ‐
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
pueden no ser la decisión óptima si se evalúan al aplicarlas en toda la red. En
este caso particular el algoritmo elige la ruta en base a que tramo tiene menor
coste de los que llegan al nodo demandante, sin tener en cuenta si a la larga
esto va a suponer un incremento en el coste.

63
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
6.2.2 Elección almacenamiento de menor coste
1.- Topología de la red
La red utilizada es la misma red que la utilizada para la prueba de
elección de almacenamiento de menor coste en el algoritmo centralizado, la
Figura 16. Los depósitos tendrán una capacidad máxima de 40 unidades de
producto siendo su característica de coste similar a la utilizada en la prueba del
algoritmo centralizado. Para los arcos 1-2 y 2-3, su capacidad de transporte
será de 100 unidades de producto, mientras que el valor del coste de
transporte resulta en este caso irrelevante puesto que sólo existe una ruta por
la que puede circular el producto.
2.- Objetivo de la prueba
Mediante esta simulación se pretende observar la solución que el
algoritmo centralizado ofrece ante una situación en la que la demanda tiene un
pico localizado. Como ya se comprobó mediante el algoritmo centralizado, esta
situación tiene una solución factible (sin necesidad de recurrir a las holguras) si
el horizonte de predicción toma una valor mayor a 10. Usando este valor para
, se pretende observar la reacción del algoritmo y la solución ofrecida por el
mismo.
3.- Resultados obtenidos
Una vez realizada la simulación se procede a mostrar los resultados
obtenidos; en este caso el flujo por los arcos así como los niveles de cada
depósito y las holguras en cada uno de ellos. Estos resultados se observan en
la Figura 27.

64
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 27: Flujos y niveles para la simulación de elección de almacenamiento de menor coste
0 2 4 6 8 10 12 14 160
10
20Entradas al depósito 1
0 100
50
100Salidas del depósito 1
0 100
50
100Nivel depósito 1
p1
1200
0 100
50
100Entradas al depósito 2
0 100
50
100Salidas del depósito 2
0 100
50
100Nivel depósito 2
12
2300
0 100
50
100Entradas al depósito 3
0 100
50
100Salidas del depósito 3
0 100
50
100Nivel depósito 3
23
3e00

65
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
4.- Conclusiones
Como se observa en la Figura 27 el algoritmo no es capaz de suministrar
una solución mediante la cual toda la demanda sea satisfecha; sino que
proporciona una que obliga a la aparición de una holgura de 50 unidades de
producto en el depósito 1.
El principal fallo que se produce aquí es que al resolver los nodos de la
red de forma aislada, la única limitación que tienen los nodos intermedios es la
capacidad de transporte de sus arcos de entrada. En este caso la capacidad
máxima de transporte de esos arcos era de 100 unidades de producto, por lo
que el algoritmo interpretó que esas 100 unidades serían transportadas sin
ningún problema. Sin embargo, al ser la capacidad máxima de almacenamiento
de los depósitos de 40 unidades, esto es lo máximo que se llega a almacenar,
puesto que el resto de los nodos no conoce la limitación real de la red.
De nuevo se presenta el mismo problema, el flujo de información sólo
recorre la red de forma ascendente; pero ahora esto desemboca en una
situación que puede provocar el colapso de toda la red. A pesar de que tan sólo
se envían 50 unidades de producto, el algoritmo y los nodos intermedios
“creen” que el flujo que los atraviesa es de 100 unidades. Este flujo de
productos que en realidad no existe puede provocar que el algoritmo identifique
determinados arcos de la red como saturados cuando en realidad no lo están
puesto que parte de su flujo (o el total) está compuesto por unidades de
producto ficticias creadas como holguras en los nodos productores.

66
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
6.3.- Tiempo de optimización en el algoritmo centralizado
Para la siguiente batería de pruebas se utilizará un esquema diferente al
de las pruebas anteriores debido a que la característica a estudiar requiere que
se realicen varias simulaciones en redes diferentes, comparando los resultados
obtenidos en cada una de ellas.
El objetivo principal de la prueba es observar la evolución del tiempo de
proceso por iteración en función del número de nodos y el número de arcos de
la red. Mediante las funciones ya desarrolladas se puede obtener el tiempo de
optimización de cada iteración; eligiendo o bien una media de todos los valores
o bien el valor máximo de todos ellos como valor representativo. También se
estudiará la influencia del horizonte de predicción, ya que, debido a la
estructura del algoritmo, es un factor de gran influencia tanto en el número de
restricciones como en el número de variables.
Para esta prueba se definirán una serie de redes con un número cada
vez mayor de nodos. Así mismo, para cada red, se crearán dos grafos
diferentes, uno de baja densidad de conexiones y otro de alta densidad. Puesto
que los resultados que se pretenden obtener son cualitativos y no cuantitativos,
la densidad de arcos de cada grafo se calificará de alta o baja sin llegar a una
clasificación numérica exhaustiva.
1.- Topología de las redes utilizadas
Se utilizarán 5 redes diferentes de 5, 10, 16, 25 y 36 nodos, creándose
con cada una de ellas dos grafos. Las redes utilizadas son mostradas en las
Figura 28 Figura 37.
Figura 29: Red 1A
Figura 28: Red 1B

67
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 31: Red 2A
Figura 30: Red 2B
Figura 33: Red 3A
Figura 32: Red 3B

68
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 34: RED 4A
Figura 35: Red 4B

69
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 36: Red 5A
Figura 37: Red 5B

70
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
2.- Descripción de los elementos de las pruebas
Esta batería de pruebas está diseñada con el objetivo de determinar el
tiempo medio de optimización por lo que no es imperativo tener una demanda
constante o una a la que sea fácil anticiparse. Se necesita colocar al algoritmo
en la situación más complicada posible, para observar los resultados cuando la
tensión es máxima. Por lo tanto los vectores de demanda serán aleatorios con
sus valores comprendidos entre un 10% y un 110% de la capacidad máxima de
producción.
En cuanto a la capacidad de producción, todos y cada uno de los nodos
productores tendrán una capacidad máxima de 10 unidades de producto y un
coste asociado constante e igual entre todos ellos. El resto de los parámetros
de la red, capacidades y coste de los arcos así como capacidad y coste de
almacenamiento, tomarán valores aleatorios pero dentro de un margen
aceptable para garantizar que el problema tenga una solución factible.
Se someterá a cada red a 5 simulaciones con diferentes horizontes de
predicción; los valores utilizados serán 4, 7, 10, 15 y 20. En cada simulación se
obtendrá un vector con el tiempo de optimización empleado en cada iteración.
3.- Resultados obtenidos
El número total se simulaciones realizadas ha sido de 50 (10 redes por 5
simulaciones por red), por lo que están disponibles muchos datos para
representarlos de diferentes maneras.
En primer lugar se representarán en un mismo eje de coordenadas el
tiempo de cada una de las iteraciones para las redes tipo A y tipo B con cada
uno de los valores de horizonte de predicción utilizado (Figura 38 y Figura 39).
En segundo lugar se representará la media de esos valores en función del
número de nodos y en función del horizonte de predicción (Figura 40,Figura
41,Figura 42 y Figura 43). Por último, ésas gráficas se combinarán en una
representación en un eje de 3 dimensiones (Figura 44 y Figura 45).

71
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 38: Tiempos de optimización para las redes A con diferentes Np
0 5 10 15 20 25 30 35 400
0.05
0.1Redes A con Np= 4 Red 1
Red 2Red 3Red 4Red 5
0 5 10 15 20 25 30 350
0.05
0.1
0.15
0.2
0.25Redes A con Np= 7
0 5 10 15 20 25 300
0.2
0.4
0.5Redes A con Np= 10
0 5 10 15 20 250
0.5
1
Redes A con Np= 15
0 5 10 15 200
0.5
1
1.5
2
2.5Redes A con Np= 20

72
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 39: Tiempos de optimización para redes B con diferentes Np
0 5 10 15 20 25 30 35 400
0.05
0.1
0.15
0.2Redes B con Np= 4 Red 1
Red 2Red 3Red 4Red 5
0 5 10 15 20 25 30 350
0.1
0.2
0.3
0.4
0.5Redes B con Np= 7
0 5 10 15 20 25 300
0.5
1Redes B con Np= 10
0 5 10 15 20 250
0.5
1
1.5
2
Redes B con Np= 15
0 5 10 15 200
1
2
3
4
5Redes B con Np= 20

73
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 40: Tiempos medios de optimización en función del número de nodos (Redes A)
5 10 16 25 360
0.5
1
1.5
2
2.5Tiempo en función del número de nodos para las redes A
Número de nodos
Tiem
po (s
)Np=4Np=7Np=10Np=15Np=20
Figura 41: Tiempos medios de optimización en función del número de nodos (Redes B)
5 10 16 25 360
0.5
1
1.5
2
2.5
3
3.5
4Tiempo en función del número de nodos para las redes B
Número de nodos
Tiem
po (s
)
Np=4Np=7Np=10Np=15Np=20

74
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 42: Tiempos medios de optimización en función del horizonte de predicción (Redes A)
4 7 10 15 200
0.5
1
1.5
2
2.5Tiempo en función del horizonte de predicción para redes A
Horizonte de predicción
Tiem
po (s
)Red 1Red 2Red 3Red 4Red 5
Figura 43: Tiempos medios de optimización en función del horizonte de predicción (Redes B)
4 7 10 15 200
0.5
1
1.5
2
2.5
3
3.5
4Tiempo en función del horizonte de predicción para redes B
Horizonte de predicción
Tiem
po (s
)
Red 1Red 2Red 3Red 4Red 5

75
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
Figura 44: Tiempos de optimización en función de Np y n (Redes A)
5 10 1625
36
47
1015
200
0.5
1
1.5
2
2.5
n
Tiempo de optimización en Redes A
Np
Tiem
po (s
)
Figura 45: Tiempos de optimización en función de Np y n (Redes B)
5 10 1625
36
47
1015
200
1
2
3
4
n
Tiempo de optimización en Redes B
Np
Tiem
po (s
)

76
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
4,.- Conclusiones
De la observación de los resultados obtenidos se pueden extrapolar
algunas conclusiones de carácter cualitativo en cuanto al tiempo de
optimización necesario para resolver una red y su evolución al aumentar
parámetros tales como el número de nodos o el horizonte de predicción.
Aún así en primer lugar hay que señalar algunos errores de carácter
numérico, producidos por las limitaciones propias del ordenador utilizado en las
simulaciones. Como se observa en la Figura 38, para un horizonte de
predicción de valor pequeño las iteraciones no tienen un valor de optimización
medio completamente constante; sino que existen fluctuaciones. Estas
variaciones pueden deberse a la propia sensibilidad del programa a la hora de
calcular el tiempo empleado en la optimización ya que la sensibilidad del
ordenador podría no ser suficiente para dar una medida exacta del tiempo. Sin
embargo, a medida que los tiempos aumentan de valor (al aumentar el número
de nodos o el horizonte de predicción) estos errores tienen menos efectos y
pueden obtenerse otras conclusiones.
En primer lugar, tal y como se observa en las Figura 40 y Figura 41, la
evolución del tiempo con el número de nodos es lineal. Esto sugiere, que tanto
para redes de alta como de baja densidad, al aumentar el número de nodos, el
tiempo de optimización necesario aumentará también, dificultando la resolución
a medida que la red se hace demasiado grande.
En cuanto a la evolución del tiempo frente al horizonte de predicción, en
las Figura 42 y Figura 43 se observa que esta característica es exponencial.
Esto supone que a medida que se intenta mejorar el controlador previendo las
actuaciones con mayor antelación, la dificultad de obtener la solución
aumentará exponencialmente con el valor de utilizado.
Por último, en las Figura 44 y Figura 45 se puede observar el tiempo de
optimización frente a las dos características para las redes de baja y alta
densidad de arcos. Cabe resaltar que el tiempo es en todos los casos
significativamente mayor en las redes de alta densidad, puesto que se

77
Desarrollo de un entorno gráfico y de controladores predictivos para el modelado y gestión de sistemas interconectados de transporte
necesitan procesar mayor número de variables a la hora de calcular la
actuación óptima. De hecho, en las figuras se puede observar que el tiempo de
proceso en las redes de alta densidad es prácticamente el doble que en las
redes de baja densidad.