6 TRANSMISIÓN DEL MOVIMIENTO GENERALIDADES · TRANSMISIÓN DEL MOVIMIENTO GENERALIDADES: La...
29
TRANSMISIÓN DEL MOVIMIENTO GENERALIDADES : La transmisión del movimiento desde un mecanismo o elemento de máquina a otro se puede realizar en forma directa, como por ejemplo el caso de un engranaje montado sobre el eje de un motor y que engrana con otro engranaje al que le transmite el movimiento de rotación del eje, o a través de vínculos intermedios que transmiten el movimiento que tiene el elemento motor al elementos conducido. Este vínculo intermedio puede ser sólido o fluido, en el primer caso podrá ser rígido, como la biela de un mecanismo, o flexible como una correa plana o trapezoidal, y en el segundo caso puede ser líquido, presentándose este caso en los mecanismos hidráulicos. Los vínculos intermedios puede ser correas planas o trapezoidales, cadenas, engranajes, tornillo sin fin y rueda helicoidal, bielas, manivelas, aceites, etc. En un principio, la transmisión del movimiento se realizó utilizando poleas y correas planas, ya sea para accionamiento individual o a partir de un eje principal para un grupo de poleas. Posteriormente, la correa plana fue desplazada por la correa trapezoidal y por los engranajes, casi en su totalidad. La correa trapezoidal, además de presentar la ventaja de la transmisión elástica, suave y silenciosa, al poder existir varias correas en una misma polea, confiere mayor seguridad y continuidad al movimiento, ya que si una de ellas se corta, el movimiento no se detiene. Actualmente, para la transmisión del movimiento ha cobrado auge la utilización de engranajes y tornillo sin fin con rueda helicoidal. En muchos casos, en los cuales no es conveniente ni práctico detener el funcionamiento del motor para cambiar el movimiento del mecanismo o elemento, se utilizan embragues, los que pueden acoplar o desacoplar durante el giro los diferentes órganos de máquinas en movimiento, permitiendo realizar los cambios necesarios. Para mayor información sobre embragues el estudiante tendrá que consultar bibliografía especializada ya que no es objeto de estudio de este curso. Eje motor y eje receptor en la transmisión del movimiento por poleas y correas Cuando el eje de una máquina motriz gira a una velocidad de rotación n, una polea que se encuentra solidaria, enchavetada, atornillada o soldada, al mismo, también gira a la misma velocidad de rotación n, y como ya se sabe, la velocidad tangencial v en la periferia de la polea dependerá del radio de la misma. Esta polea puede transmitir, por fricción o a través de una correa, su movimiento a otra polea que esté montada sobre el eje de otro mecanismo receptor del movimiento, el cual según sea la relación de transmisión, podrá adquirir menor, igual o mayor velocidad de rotación que el primero. La polea que transmite el movimiento se denomina motora o conductora, en tanto que la que recibe el movimiento recibe el nombre de conducida. Según muestra la figura (Fig.6.1), la polea motora tiene un radio R , gira a una velocidad angular ω y sobre la periferia de la misma actúa constantemente una fuerza tangencial P que produce un momento motor M que torsiona el eje Este momento motor está dado por la expresión: M m = P.R (6.1) La potencia que desarrolla el motor que acciona la polea motora es: N = M m .ω (6.2) Además, como el punto de aplicación de la fuerza P se mueve con una velocidad tangencial periférica v, la potencia desarrollada tangencialmente por la polea es: N = P.v (6.3) 6
Transcript of 6 TRANSMISIÓN DEL MOVIMIENTO GENERALIDADES · TRANSMISIÓN DEL MOVIMIENTO GENERALIDADES: La...

TRANSMISIÓN DEL MOVIMIENTO
GENERALIDADES: La transmisión del movimiento desde un mecanismo o elemento de máquina a otro se puede realizar en forma directa, como por ejemplo el caso de un engranaje montado sobre el eje de un motor y que engrana con otro engranaje al que le transmite el movimiento de rotación del eje, o a través de vínculos intermedios que transmiten el movimiento que tiene el elemento motor al elementos conducido. Este vínculo intermedio puede ser sólido o fluido, en el primer caso podrá ser rígido, como la biela de un mecanismo, o flexible como una correa plana o trapezoidal, y en el segundo caso puede ser líquido, presentándose este caso en los mecanismos hidráulicos. Los vínculos intermedios puede ser correas planas o trapezoidales, cadenas, engranajes, tornillo sin fin y rueda helicoidal, bielas, manivelas, aceites, etc. En un principio, la transmisión del movimiento se realizó utilizando poleas y correas planas, ya sea para accionamiento individual o a partir de un eje principal para un grupo de poleas. Posteriormente, la correa plana fue desplazada por la correa trapezoidal y por los engranajes, casi en su totalidad. La correa trapezoidal, además de presentar la ventaja de la transmisión elástica, suave y silenciosa, al poder existir varias correas en una misma polea, confiere mayor seguridad y continuidad al movimiento, ya que si una de ellas se corta, el movimiento no se detiene. Actualmente, para la transmisión del movimiento ha cobrado auge la utilización de engranajes y tornillo sin fin con rueda helicoidal. En muchos casos, en los cuales no es conveniente ni práctico detener el funcionamiento del motor para cambiar el movimiento del mecanismo o elemento, se utilizan embragues, los que pueden acoplar o desacoplar durante el giro los diferentes órganos de máquinas en movimiento, permitiendo realizar los cambios necesarios. Para mayor información sobre embragues el estudiante tendrá que consultar bibliografía especializada ya que no es objeto de estudio de este curso. Eje motor y eje receptor en la transmisión del movimiento por poleas y correas Cuando el eje de una máquina motriz gira a una velocidad de rotación n, una polea que se encuentra solidaria, enchavetada, atornillada o soldada, al mismo, también gira a la misma velocidad de rotación n, y como ya se sabe, la velocidad tangencial v en la periferia de la polea dependerá del radio de la misma. Esta polea puede transmitir, por fricción o a través de una correa, su movimiento a otra polea que esté montada sobre el eje de otro mecanismo receptor del movimiento, el cual según sea la relación de transmisión, podrá adquirir menor, igual o mayor velocidad de rotación que el primero. La polea que transmite el movimiento se denomina motora o conductora, en tanto que la que recibe el movimiento recibe el nombre de conducida. Según muestra la figura (Fig.6.1), la polea motora tiene un radio R , gira a una velocidad
angular ω y sobre la periferia de la misma actúa constantemente una fuerza tangencial P que produce un momento motor M que torsiona el eje Este momento motor está dado por la expresión: Mm = P.R (6.1)
La potencia que desarrolla el motor que acciona la polea motora es: N = Mm.ω (6.2) Además, como el punto de aplicación de la fuerza P se mueve con una velocidad tangencial periférica v, la potencia desarrollada tangencialmente por la polea es: N = P.v (6.3)
6

La (6.2) y la (6.3) son expresiones que permiten conocer, a partir del momento motor Mm y de la velocidad angular ω, o de la fuerza P y de la velocidad tangencial v, que debe realizar la polea motora, la potencia N en el eje que debe entregarle el motor, o viceversa. Por ser, según ya se viera en capítulos anteriores, para un número n de vueltas por minuto:
v = ω.R = 60
...2 Rnπ
(6.4) Resulta, de la (6.3) y de la (6.4):
N = P.v = P.ω.R = P. 60
...2 Rnπ
= 55,9
.. nRP
(6.5) Si P está en Newton, R está en m, ω en rad/s y v en m/s, en la (6.5), N resulta en Vatios (W). Si P está en kg, R está en cm, ω. en rad/s y v en m/s, en la (6.5), para obtener N en CV, se aplica la siguiente expresión:
71620
..
100.75.60
....2 nrPnRPN ==
π
(6.6) O también:
Rn
NP
.71620=
(6.7) El eje receptor, sobre el cual se ejercerá la fuerza P, a través del vínculo utilizado, estará sometido a un momento rotor:
''.'
RPM r = (6.8) Siendo por lo tanto la potencia N’ transmitida, para una velocidad angular ω’ en rad/s y n’
vueltas por minuto, y una velocidad tangencial periférica v’ en m/s:
N’ = P’.v’ = '
rM .ω’.R’ = 60
''...2 Rnπ
(6.9) Existiendo las mismas consideraciones para las dimensiones de cada parámetro que interviene en dicha expresión. Determinación de la relación de transmisión
Según lo ya visto, para que pudieran engranar dos engranajes entre sí, según muestra la figura (Fig.6.2), debían tener igual módulo, de donde se obtenía para la relación de transmisión i las expresiones siguientes, en función de sus velocidades angulares, diámetros primitivos y número de dientes:
2
1
2
1
1
2
1
2
z
z
D
D
n
ni ====
ω
ω
(6.10) Para tornillo sin fin y rueda helicoidal, la relación de transmisión para zs filetes del tornillo y zR dientes de la rueda era:
ruedaladedientesdenúmero
fintornillodelfiletesdenúmero
z
zi
R
s sin==
(6.11) Para el accionamiento de poleas con correas, la relación de transmisión i, de acuerdo a la figura (Fig.6.3) es:
conductorapoleaangularvelocidad
conducidapoleaangularvelocidadi ==
1
2
ω
ω
(6.12) Pero se tiene que es:

60
21
1
nπω =
(6.13) y
60
22
2
nπω =
(6.14) Efectuando el cociente entre la (6.14) y la (6.13),
se obtiene:
1
2
1
2
n
n=
ω
ω
(6.15) Las velocidades tangenciales periféricas en cada polea están dadas por las siguientes expresiones:
60
11
1
nDv
π=
(6.16)
60
22
2
nDv
π=
(6.17) Como las dos poleas están unidas por un mismo vínculo indeformable, como es la correa, sus velocidades periféricas deben ser iguales: v1 = v2 (6.18) Por lo tanto se pueden igualar la (6.16) y la (6.17):
60
11nDπ
60
22nDπ
= (6.19)
Operando en la (6.19) se obtiene:
2
1
1
2
D
D
n
n=
(6.20) Teniendo en cuenta la (6.12), la (6.15) y la (6.20), se obtiene para la relación de transmisión de las poleas I y II de la figura (Fig.6.3), la siguiente expresión:
2
1
1
2
1
2
D
D
n
ni ===
ω
ω
(6.21) Accionamientos individuales y por grupos mediante correas Los accionamientos individuales se realizan por lo general mediante correas planas o trapezoidales, en los casos que la polea motora que se encuentra enchavetada en el eje del motor, eléctrico o térmico, transmite a otra máquina, por ejemplo un compresor, como el que se muestra en la figura (Fig.6.4), para cuyo caso, la relación de transmisión se puede obtener de la expresión (6.21), de la cual resulta la expresión:
n1.d1 = n2.d2 (6.22) De la (6.22) se obtiene la velocidad de rotación que adquiere la polea motora, en función de la velocidad de rotación n1 y de los diámetros d1 de la polea motora y d2 de la polea conducida:

2
1
12d
dnn =
(6.23) Una vez obtenida esta velocidad de rotación se pueden obtener los otros parámetros, como la velocidad tangencial v y angula ω. Si el movimiento de rotación del motor eléctrico o térmico se transmite a un juego de poleas de una transmisión principal y estas a su vez lo transmiten a través de correas a otros ejes secundarios con poleas que accionan máquinas individuales y en series, se obtendrán trenes cinemáticos de poleas según muestra la figura (Fig.6.5), en el cual, teniendo en cuenta la velocidad de rotación n1 y el diámetro d1 de la polea solidaria al motor eléctrico que mueve los trenes y los diámetros y las relaciones de transmisión de las restantes, considerando las que son poleas motoras y poleas conducidas, se podrán obtener, por aplicación de la (6.21) las velocidades de rotación de cada polea para cada tren cinemático, realizando las siguientes operaciones: - Polea motora de diámetro d1 y velocidad de rotación n1 y polea conducida de diámetro d2 y velocidad de rotación n2: n1.d1 = n2.d2 (6.24) Operando en la (6.24), el valor de n2 resulta:
2
2
12d
dnn =
(6.25) - Polea motora de diámetro d3 y velocidad de rotación n2 y polea conducida de diámetro d4 y velocidad de rotación n3: n2.d3 = n3.d4 (6.26) Operando en la (6.26), el valor de n3 resulta:
4
3
23d
dnn =
(6.27) - Polea motora de diámetro d5 y velocidad de rotación n3 y polea conducida de diámetro d7 y velocidad de rotación n4: n3.d5 = n4.d7 (6.28) Operando en la (6.28), el valor de n4 resulta:
7
5
34d
dnn =
(6.29)

Mediante el reemplazo sucesivo de los valores de n2 y n3 dados por la (6.25) y la (6.27) respectivamente en la (6.29) se obtiene el valor de n4:
742
531
14..
..
ddd
dddnn =
(6.28) - Polea motora de diámetro d6 y velocidad de rotación n3 y polea conducida de diámetro d8 y velocidad de rotación n5: n3.d6 = n5.d8 (6.29) Operando en la (6.29), el valor de n5 resulta:
8
6
35d
dnn =
(6.30) Reemplazando en la (6.30) el valor de n3 se obtiene:
842
631
15..
..
ddd
dddnn =
(6.31) La (6.28) y la (6.31) dan las velocidades de rotación n4 y n5 de las poleas d7 y d8 que están al final de los trenes cinemáticos, mediante el producto entre la velocidad de rotación inicial de la primera polea motora y el cociente que tiene por numerador el producto de las poleas motoras y por denominador el producto de las conducidas.

Se puede observar que sobre el mismo eje en el que se encuentra solidaria una polea conducida que recibe el movimiento de rotación de una polea conductora, se encuentra otra polea que hace de conductora para una nueva polea que se encuentra en otro eje. Este sistema de varios ejes y poleas se suele emplear también cuando se desea obtener una reducción de velocidad grande. Las correas cruzadas, indicadas con T en la figura (Fig.6.5), que se indican en la figura, se utilizan para lograr cambiar el sentido de rotación del eje, se encuentran realizando un bucle, por lo que transmiten la rotación en sentido contrario al del eje, denominándose por tal motivo correas de la contramarcha. Para ello se utilizan las denominadas poleas locas, indicadas con L en la figura (Fig.6.5), es decir poleas que al girar no arrastran el eje sino que giran sobre él, de tal forma que no transmiten movimiento, por lo que para el cambio de marcha se pasa cada correa, la de la marcha directa y la de la contramarcha, según sea el caso del movimiento que se desee obtener, una a la polea loca y la otra a la polea motriz. La figura (Fig.6.5a) muestra el tren de poleas en vista frontal y la figura (Fig.6.5b) lo muestra en vista lateral, pudiendo entre ambos apreciarse las posiciones de la poleas motoras y conducidas y las correas, tanto las de transmisión directa como las de las contramarchas. Accionamiento mediante correas trapezoidales
Estas correas se utilizan generalmente cuando las distancias entre los ejes de las poleas es reducida. Su sección es trapezoidal, por lo que son designadas con este nombre o también llamadas correas en V. El trapecio es isósceles, es decir de lados simétricos, los cuales concurren a un punto, formando un ángulo β menor que 60º. Las poleas tienen gargantas de forma trapezoidal, de tal forma que las correas pueden introducirse dentro de las mismas produciéndose un efecto de cuña, lo que hace que aparezcan fuerzas simétricas laterales perpendiculares a las caras laterales de la correa, lo que le da mayor adherencia, pudiendo transmitirse grandes potencias sin resbalamientos. En caso de transmisión de
grandes potencias se utilizan poleas de varias gargantas, de tal forma que actúan varias correas a la vez para la transmisión. El ángulo β entre las caras varía por lo general entre 32º y 40º. Fuerzas actuantes sobre la correa (plana y trapezoidal) Poleas planas: La figura (Fig.6.7) representa una polea de radio r que gira con una velocidad angular ω de rad/s, siendo n su velocidad de rotación en rpm, arrastrando una correa trapezoidal con una velocidad tangencial v en m/s, la que experimenta en sus extremos las fuerzas de tracción F1 en el ramal tenso y F2 en el ramal flojo. Si se analizan las solicitaciones a las que está siendo sometido un elemento dl de la correa, se pueden observar las siguientes fuerzas que actúan sobre el mismo: - Fuerzas de tracción F sobre el ramal flojo y F+dF sobre el ramal tenso. - Fuerza de reacción dP de la polea sobre la correa.
- Fuerza centrífuga dC debido a la velocidad tangencial de la correa. - Fuerza de rozamiento µdP sobre los flancos de la correa. Las características de la correa y de la polea son: - γ peso específico del material de la correa es en g/cm3. - b1 ancho superior de la correa en cm. - b2 ancho inferior de la correa en cm. - t espesor de la correa en cm.

- r radio de la polea en cm. - g aceleración de la gravedad en cm/s2. De las dimensiones de la correa se tiene, según la figura (Fig.6.8a), para una correa plana de ancho b, o según la figura (Fig.6.8b), para una correa trapezoidal de ancho medio igual a:
2
21bb
b+
= (6.32)
el volumen del elemento dl es: dV = b.t.dl = b.t.r.dϕ (6.33) La masa del elemento es:
g
drtbM
ϕγ ....=
(6.34) La fuerza centrífuga es: dC = d(M.a) (6.35) Siendo en la (6.35) a la aceleración centrífuga, dada por la expresión:
r
va
2
=
(6.36) Planteando las ecuaciones para un estado de equilibrio de la polea y correa en movimiento
se obtiene:
∑Y ≡ dP + dC – Fsen 2
ϕd
- (F+dF) sen 2
ϕd
= 0 (6.37)
∑X ≡ (F+dF)cos 2
ϕd
- Fcos 2
ϕd
- µdP = 0 (6.38) De la ecuación (6.38) se obtiene para dP:
µ
ϕdF
d
dP
.2
cos
= (6.39)
La fuerza centrífuga dC que actúa sobre la masa dM del elemento diferencial de longitud dl es:
dC = a.dM (6.40) Pero es:
r
va
2
=
(6.41) Por otra parte, la masa diferencial dM en función del volumen del elemento diferencial dl y de su peso específico γ es:
g
drtbdM
ϕγ ....=
(6.42) Por lo tanto, de la (6.40), (6.41) y (6.42) es:

r
v
g
drtbdFdC c
2....
.ϕγ
ϕ ==
(6.43) Donde es Fc la fuerza centrífuga para un elemento de correa correspondiente al ángulo unitario, estando dado por la expresión:
r
v
g
rtb
d
dCFc
2...γ
ϕ==
(6.44) Si en la expresión (6.37) se reemplazan dP y dC por sus valores dados por la (6.39) y el segundo miembro de la (6.43) respectivamente, y además se multiplican ambos miembros de la misma por µ, se obtiene:
( ) 0
22
2cos. =++− ϕµ
ϕµ
ϕdF
dsendFF
ddF c
(6.45) Operando matemáticamente la (6.45) se obtiene:
0.
22
2cos =+−− ϕµ
ϕµµ
ϕdF
ddFsenF
ddF c
(6.46) Si en la (6.46) se considera que es:
a) 0
2≅
ϕd
⇒ 1
2cos =
ϕd
y b) 22
ϕϕ ddsen ≅
(6.47)
Y por otra parte, se desprecia 2
ϕddF
por tratarse de un diferencial de segundo orden, por lo tanto, la (6.46) queda reducida a: dF - µ.F.dϕ + µ.Fc.dϕ = 0 (6.48) De la (6.48) se obtiene:
ϕµ d
FF
dF
c
.=−
(6.49) Integrando la expresión (6.49), el primer miembro entre los límites F1 y F2 y el segundo miembro entre los límites 0 y ϕ:
∫∫ =
−
ϕ
ϕµ0
1
2
dFF
dFF
Fc
(6.50) Operando se obtiene:
a) ϕµ=
−
−
c
c
FF
FF
2
1ln
⇒ b)
ϕµe
FF
FF
c
c =−
−
2
1
(6.51) La (6.51b) también se puede escribir como:

( )
ϕµ
ϕµ
e
eFFFF c
1121
−−=−
(6.52) En la (6.52) es F1 la fuerza sobre la correa en el ramal tenso y F2 la fuerza sobre el ramal flojo. Poleas trapezoidales: Para correas trapezoidales se debe tener en cuenta el efecto cuña, es decir el ángulo formado por las caras laterales de la correa que forman entre sí el ángulo β y de las fuerzas dP/2 que actúan sobre las mismas, según se muestra en la figura (Fig.6.9), siendo las condiciones de equilibrio las siguientes:
∑Y ≡ dPsen 2
β
+ dC - Fsen 2
ϕd
- (F+dF)sen 2
ϕd
= 0 (6.53)
∑X ≡ (F+dF)cos 2
ϕd
- Fcos 2
ϕd
- 2
dPµ
- 2
dPµ
= 0 (6.54) Las expresiones (6.53) y (6.54) contienen el ánguloβ y la resultante de las fuerzas dP/2, es decir dPsenβ/2. Realizando en las expresiones (6.53) y (6.54) las mismas
operaciones que las efectuadas en las (6.37) y (6.38) y haciendo las mismas consideraciones por las cuales se obtenían las expresiones (6.47), se obtendrá:
F.dϕ - 2
β
µsen
dF
- Fc dϕ = 0 (6.55) De la (6.55) se obtiene:
2
β
ϕµ
sen
d
FF
dF
c
=−
(6.56) Integrando la (6.56), el primer miembro entre F1 y F2 y el segundo entre 0 y ϕ , se obtiene:
2/
2
1 β
ϕµ
sen
c
c eFF
FF=
−
−
(6.57) Y finalmente:
2/
2/
121
1)(
β
ϕµ
β
ϕµ
sen
sen
c
e
eFFFF
−−=−
(6.58) Tanto en la expresión (6.52) como en la (6.58), la fuerza T transmitida por la correa es: T = F1 – F2 (6.59) Según como ya se viera en la expresión (2.161) al estudiar el teorema de Prony. Potencia transmitida por las correas La potencia que transmita la correa estará en función de la fuerza T que realice la misma y de su velocidad tangencial v de desplazamiento, respondiendo a la expresión (6.3) ya vista anteriormente, por lo tanto, será:
( ) ( ) EvFFvFFvTN c ....121
−=−== (6.60)

Siendo en la (6.60) ϕµ
ϕµ
e
eE
1−=
para correas planas y 2/
2/1
β
ϕµ
β
ϕµ
sen
sen
e
eE
−=
para correas trapezoidales. Área de la sección transversal de la correa (dimensionamiento)
A los efectos de dimensionar la sección de la correa para que resista los esfuerzos a los que estará sometida, se debe considerar la resistencia unitaria a la tracción σt de la misma, la que depende del material del cual está construida la correa, de la fuerza centrífuga que actúa sobre ella, del ángulo con el cual la correa abraza a la polea y de la relación t/d, siendo t el espesor de la correa y d el diámetro de la polea. Si se considera que la sección de la correa, ya sea plana o trapezoidal, según muestra la figura (Fig.6.10a) o la (Fig.6.10b), es igual a: A = b.t (6.61) Si la fuerza máxima a la cual está solicitada es la F1, se tendrá:
tb
Ft
.
1=σ (6.62)
Por lo tanto, la sección de la correa será:
t
Ftb
σ1. =
(6.63) Por otra parte, si en la expresión (6.60) que da la potencia N transmitida por la correa, se reemplaza la fuerza centrífuga Fc dada por el tercer miembro de la expresión (6.44), se obtiene:
Ev
g
vtbFN .
2
1
−=
γ
(6.64) Si en la (6.64) se saca fuera del paréntesis, como factor común, b.t, y el paréntesis, con la expresión resultante dentro del mismo, se lo pasa al primer miembro, se obtiene:
E
g
v
Ntb
t
1.
2
−
=γ
σ
(6.65) Fuerza normal sobre los flancos de las correas trapezoidales Las fuerzas F1 y F2 que actúan sobre la correa, según se observa en la figura (Fig.6.7), originan sobre ésta una fuerza resultante P debido a las fuerzas de reacción P/2 que ejerce, en forma normal a los flancos de la correa, la polea sobre la cual está montada la primera, según se muestra en la figura (Fig.6.11), resultando por lo tanto: P = F1 + F2 (6.66)

La fuerza normal sobre los flancos de la correa es:
22
βsen
PPn =
(6.67) Por lo tanto, el esfuerzo de tracción por rozamiento FR sobre los flancos de la correa, para el coeficiente de rozamiento µ, considerando la (6.67) vale:
222
22β
µ
βµµ
sen
P
sen
PPF nR ===
6.68) Se denomina por lo general rozamiento equivalente µe a la expresión:
2
β
µµ
sene =
(6.69) Por lo tanto, la expresión (6.68) se puede escribir de la forma siguiente: FR = µe.P (6.70) Ángulo abrazado por la correa y largo de la misma
El ángulo con que abraza la correa a las poleas dependerá de los diámetros de estas últimas y de la distancia a la que se encuentran entre sí sus centros. Si los diámetros de
ambas poleas son iguales, según se muestra en la figura (Fig.6.12), el ángulo con que abraza la correa a cada polea es 180º. Si los diámetros no son iguales, según se muestra en la figura (Fig.6.13), los ángulos abrazados por la correa son diferentes, siendo el ángulo α1 menor a 180º en la polea menor y el ángulo α2 mayor a 180º en la polea mayor. Si se analiza la figura (Fig.6.13), se
tiene que el ángulo α1 con el cual la correa abraza a la polea menor es igual a 180º-δ y el ánguloα2 con el cual abraza a la polea mayor es 180º-δ , siendo δ el ángulo que forma el radio de cada polea que pasa por el último o primer punto de contacto que tiene la correa al dejar o entrar a la polea respectivamente, con el eje vertical de la polea, resultando por lo tanto: α1 = 180º - 2δ (6.71) α2 = 180º + 2δ (6.72) Por otra parte, de la figura (Fig.6.13) se tiene que es:

L
dd
L
dd
sen2
2 12
12
−=
−
=δ
(6.73) El largo total l de la correa es:
δ
απ
απ cos2
º360º360
2
2
1
1Lddl ++=
(6.74) Si las poleas son de igual diámetro, la (6.74) se convierte en: l = π d + 2 L (6.75) La distancia L entre centros de poleas se adopta según las necesidades, siendo recomendables las siguientes:
)(221max
ddL += (6.76)
mm
ddL 50
2
21
min ++
=
(6.77) Fuerza tangencial corregida en correas trapezoidales Partiendo de las condiciones de diseño, una vez obtenida la fuerza que debe transmitir la correa, se debe tener en cuenta la influencia del ángulo de contacto o de adherencia y de la clase de servicio a la que estará sometida la correa, debiendo ser afectada la fuerza calculada por un Factor de corrección por ángulo de contacto C1 y por un Factor de corrección por tipo de servicio C2.
Por tal motivo, obtenida la fuerza T según la expresión (6.60), la fuerza tangencial corregida Tc será:
Tc = C1.C2.T (6.78)
Donde C1 y C2 se encuentran tabulados, según se muestra más adelante, el primero en función de la (6.63) y el segundo en función del tipo de servicio.
El número z de correas trapezoidales que se utilizan en esta transmisión, estará justamente en función de la fuerza de transmisión Tc, de la sección S de cada correa y del esfuerzo unitario de tracción σt , resultando:
Tc = z.S.σt (6.79)
Conocida la fuerza Tc, se obtiene:
t
c
S
Tz
σ.=
(6.80)
Los valores de σt se toman de la siguiente manera:
0,15 kg/mm2 ≤ σt ≤ 0,20 kg/mm2 para v< 10 m/s; 0,13 kg/mm2≤ σt ≤ 0,15 kg/mm2 para v< 25 m/s.

Factor ángulo de contacto C1
L
dd
2
12−
Ángulo de
Contacto α
Factor C1
L
dd
2
12−
Ángulo de
Contacto α
Factor C1
0,00
0,16
0,33
0,50
0,67
0,84
1,00
180º
170º
160º
150º
140º
130º
120º
1,10
1,07
1,03
0,99
0,94
0,88
0,81
1,17
1,34
1,50
1,67
1,84
2,00
110º
100º
90º
80º
70º
60º
0,74
0,66
0,58
0,49
0,40
0,31
Factor tipo de servicio C2
Tipo de accionamiento
Factor C2
Máquinas impulsadas
Motor eléctrico Motor a combustión
Ventiladores, transmisiones, etc. (cargas constantes)….
Máq. Textiles, agitadoras; máq. de carpintería,
balancines (cargas variables) ……………………………..
Compresores, laminadoras, guinches, cepilladoras,
rompedoras (cargas muy variables)……………………….
1,2
1,3
1,5
1,5
1,625
1,875
Velocidad de la correa
La velocidad tangencial v en m/s de la correa está en función del número n de vueltas por minuto con que gira la polea, resultando:

60
.ndv
π=
(6.81)
La velocidad v dependerá del tipo de correa, del material del cual está compuesto, de la clase de trabajo que realiza la máquina impulsada, correspondiendo a mayor velocidad mayor potencia. Pero la velocidad está limitada por la fuerza centrífuga que tiende a separar la correa de la polea, por lo que se recomienda para el diseño de las mismas usar velocidades comprendidas entre 10 m/s< v< 25 m/s para correas planas y velocidades entre 7,5 m/s < v< 35 m/s, aunque en algunos equipos especiales, como por ejemplo en vehículos para la nieve y otros recreativos cuentan con correas diseñadas para operar a más de 75 m/s.
Tipo de correas Correas planas: estas correas, las primeras en existir desde la revolución industrial, han sido reemplazadas en muchas aplicaciones por la correas trapezoidales, aunque todavía se usan debido a su gran flexibilidad en poleas de pequeño diámetro y cuando se necesitan altas velocidades con potencias no muy elevadas, dependiendo la fuerza de tracción que transmiten, de la tensión que se les dé con la separación entre sí de las poleas, presentando mayor tendencia a resbalar que la correas en V. El material de construcción de una correa debe reunir algunos requisitos, como alta resistencia, durabilidad, gran flexibilidad y alto coeficiente de fricción, resistente a las condiciones ambientales de trabajo y de bajo costo. Por lo general se construyen de cuero, lona de algodón, caucho reforzado con cuerdas de algodón y material sintético como el hule o el nylon. Son capaces de transmitir hasta 3 kW por mm de ancho operando a velocidades de hasta 200m/s. Correas trapezoidales: están construidas por lo general de caucho y fibras de algodón o sintéticas, se clasifican según la sección, de acuerdo a su resistencia y velocidad tangencial de funcionamiento, encontrándose tabuladas, según sus dimensiones, por lo general de acuerdo al fabricante de las mismas, en tablas como la que se transcribe a continuación:
Dimensiones Fuerza tangencial de cada correa en kg
Tipo
t b Sección (mm2) v<10m/s v<25m/s X 10 6 45 9,3 6,7 A 12,7 7,9 82 20,5 14 B 15,9 10,3 124 29 20 C 22,2 14,3 248 48 33 D 31,8 16,7 435 90 66 E 38,1 22,2 676 131 87
Los valores de t y b de la tabla son los correspondientes a las dimensiones indicadas en la figura (Fig.6.10) vista anteriormente. Por lo general, los fabricantes de correas trapezoidales editan manuales de uso y selección de correas, los cuales contienen indicaciones prácticas de la elección del tipo, tamaño, potencia que transmiten, largo y cantidad de correas a utilizar para un determinado servicio.
Poleas para correas planas y trapezoidales

Si bien las poleas para correas planas son de geometría sencilla, deben asegurar que las correas no salgan de las mismas. Ello se logra, según se muestra en la figura (Fig6.14), con un perfil convexo de la superficie periférica de las poleas, o colocando pestañas laterales, siendo las primeras las más usadas. En la figura mencionada, es a la convexidad dada a la polea y p las pestañas laterales colocadas en la misma. Se construyen de fundición de hierro, acero, madera, etc. Las poleas para correas trapezoidales se construyen por lo general de fundición de hierro,
de placas de acero o aluminio estampado, y de materiales plásticos o sintéticos. En la figura (Fig.6.15) se muestran las dimensiones características, donde es Dp el diámetro primitivo o efectivo y De el diámetro exterior, siendo: De = Dp + 2d (6.82) El ancho o espesor A de la
llanta de la polea depende del número de correas z, dada por la siguiente expresión: A= (z – 1) h + 2g (6.83) La profundidad de la acanaladura o garganta de la llanta de la polea donde se alojará la correa, debe ser tal que permita que esta última encastre perfectamente, sin llegar a tocar el fondo de la garganta ya que esto anula el efecto de cuña que se ejerce sobre la correa. Por este motivo las paredes de la garganta o acanaladura de la polea están inclinadas formando un ángulo β igual a los de la correa. El ancho máximo a de la garganta está limitado justamente para lograr que la correa que se inserta en la acanaladura trabaje apoyando totalmente sus flancos contra los flancos de la garganta de la polea, para obtener la mayor superficie de contacto posible, lo que favorece el efecto cuña y el rozamiento. Se distinguen poleas de ranuras normales y poleas de ranuras profundas, siendo estas últimas para mandos cruzados u otros casos donde las correas entran en la garganta con un determinado ángulo respecto del plano normal al eje de la polea. Accionamiento mediante ruedas de fricción A) Accionamiento por ruedas cilíndricas de ejes paralelos y contacto periférico: según lo visto para el contacto de dos cilindros lisos, que conformaban los cilindros primitivos de los engranajes, los cuales se muestran nuevamente en la figura (Fig.6.16), se obtuvieron las siguientes expresiones:
Por ser:
1
1
11160
2. r
nrv
πω ==
(6.84) y
2
2
22260
2. r
nrv
πω ==
(6.85) Como es:
v1 = v2 (6.86)

Por lo tanto, igualando la (6.84) y (6.85) y operando, se tendrá:
2
1
12r
rnn =
(6.87) B) Accionamiento por ruedas cilíndricas con ejes cruzados a 90º (rueda y plato de fricción) De igual forma que el caso anterior, se tiene según la figura (Fig.6.17):
1
1
160
2r
nv
π=
(6.88)
2
2
260
2r
nv
π=
(6.89) Por ser: v1 = v2 (6.90) Pero como es: r2 = x (6.91)
Reemplazando el valor de r2 por x, según la (6.91), en la (6.89) e igualando con la (6.88) se obtiene:
x
rnn 1
12=
(6.92) Variando x se varía n2. C) Accionamiento mediante ruedas de fricción con contacto frontal En este caso los ejes son paralelos, tomándose la velocidad tangencial v en la circunferencia de contacto, según muestra la figura (Fig.6.18), resultando por lo tanto:
x
nr
nv
60
2
60
22
1
1ππ
== (6.93)
Operando en la (6.93) se obtiene:
x
rnn 1
12=
(6.94) Donde x es la distancia desde el borde de la circunferencia conductora al centro de la circunferencia conducida. D) Accionamiento por ruedas de fricción cónicas
En este caso, la velocidad se toma sobre la circunferencia media de ambos conos, según se indica en la figura (Fig.6.19), resultando: v1 = v2 (6.95) Por lo que es:

2
2
1
1
60
2
60
2r
nr
n ππ=
(6.96) Operando en la (6.96) se obtiene:
2
1
12r
rnn =
(6.97) Transmisión del movimiento mediante cono de fricción y rueda cilíndrica
Con este sistema se tiene la posibilidad de variar la velocidad de la rueda cilíndrica trasladándola a lo largo de la generatriz del cono, ya que para cada posición de éste se tendrá una relación de transmisión distinta, según la relación de los radios de la rueda y del cono, lo que estará además en función de la distancia x de la circunferencia media de la rueda al vértice del cono, como se muestra en la figura (Fig.6.20).
Si es r1 el radio del cono en el punto de contacto del radio r2 de la rueda cilíndrica, n1 la velocidad de rotación del cono y n2 la velocidad de rotación de la rueda cilíndrica, se tendrá de acuerdo a la relación de transmisión:
2
1
1
2
r
r
n
n=
(6.98) Se tiene además, de la figura (Fig.6.20): r1 = x.senβ (6.99) Por lo tanto, de la (6.98) y (6.99) se obtiene:
2
1
2
1
12
.
r
senxn
r
rnn
β==
(6.100) Variando la distancia x se obtienen distintas velocidades. Cambio de marcha con rueda de fricción
El sentido de giro de las ruedas cilíndricas 1 y 2, de radios de contactos r1 y r2 respectivamente, depende del sentido de giro de la rueda 3, de radio r3, la que se puede desplazar en dirección del eje xx pudiendo hacer contacto con la rueda 1 o con la rueda 2, por lo que el eje xx tendrá distinto sentido de giro según con cual de las ruedas esté en contacto durante el giro,
estando determinada la velocidad para cada caso por la expresión (6.92), resultando por lo tanto, según la figura (Fig.6.21):
a) 1
3
31r
rnn =
b) 2
3
32r
rnn =
(6.101)
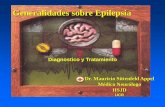
Para r1 = r2 es n1 = n2 pero de distintos sentidos de giro. Accionamiento mediante ruedas dentadas Según lo visto anteriormente al estudiar los engranajes, estos presentan ciertas características, según las cuales solo pueden engranar entre sí los que tengan igual módulo, por lo que la relación que da el número de vueltas n1 de uno de ellos en
función del número de vueltas n2 de la del otro depende de sus números de dientes z1 y z2 respectivamente, por lo que resulta: n1.z1 = n2.z2 (6.102) De donde se obtiene:
2
1
12z
znn =
(6.103) Si se tuviera un tren de engranajes, según indica la figura (Fig.6.23), se puede obtener una
expresión de la velocidad de rotación n4 de la última de ellas en función del la velocidad de rotación n1 de la primera y de la relación del número de dientes de las mismas, según se indica a continuación: Del engrane de las ruedas z1 (conductora) y z2 (conducida), se
tiene:
n1.z1 = n2.z2 ⇒ 2
1
12z
znn =
(6.104) La rueda z3 se halla montada sobre el mismo eje de la rueda z2, teniendo por lo tanto la misma velocidad de rotación n2 y se comporta como conductora al engranar con la rueda z4 que es la conducida, por lo que se establece la relación siguiente entre ellas:
n2 .z3 = n3.z4 ⇒ 4
3
23z
znn =
(6.105) Reemplazando en la (6.105) el valor de n2 dado por la (6.104) se obtiene:
42
31
13.
.
zz
zznn =
(6.106) De la misma manera ocurre entre la rueda conductora z5 y la rueda conducida z6, obteniéndose:
n3 .z5 = n4.z6 ⇒ 6
5
34z
znn =
(6.107) Reemplazando el valor de n3 dado por la (6.106) en la (6.107), se obtiene:

642
531
14..
..
zzz
zzznn =
(6.108) Es decir que para la obtención de la velocidad de rotación nn del último engranaje del tren, conociendo la velocidad de rotación n1 del primer engranaje conductor y del número de dientes zi de cada engranaje del tren, se cumple la siguiente relación:
conducidaszproducto
sconductorazproductonn
i
i
n 1=
(6.109) Accionamiento mediante tornillo sinfín y rueda helicoidal
La relación de transmisión que se obtiene mediante el uso del engrane de un tornillo sin fin y un engranaje helicoidal es elevada, por lo que se pueden producir reducciones de velocidades importantes con solo dos elementos en contacto y en un pequeño espacio. De acuerdo a la figura (Fig.6.24) y según la expresión (4.205) ya vista al estudiar el tema de engranajes, siendo respectivamente nr y zr la velocidad de rotación y el número de dientes de la rueda helicoidal y nt y zt la velocidad de rotación y número de filetes, respectivamente del tornillo sin
fin, se puede obtener la siguiente relación: zt.nt = zr.nr (6.110) De la (6.110) se obtiene:
r
t
trz
znn =
(6.111) Variación de la velocidad en la máquinas herramientas La variación de la velocidad en las máquinas herramientas puede lograrse utilizando distintos dispositivos mecánicos, hidráulicos o neumáticos, pudiendo estar éstos a su vez, combinados. Los mecánicos son los más generalizados, estando constituidos por poleas y correas, ruedas de fricción, engranajes o ruedas dentadas, acoplamientos por uñas, etc., de los cuales se analizarán los principales. Mediante poleas y ruedas dentadas
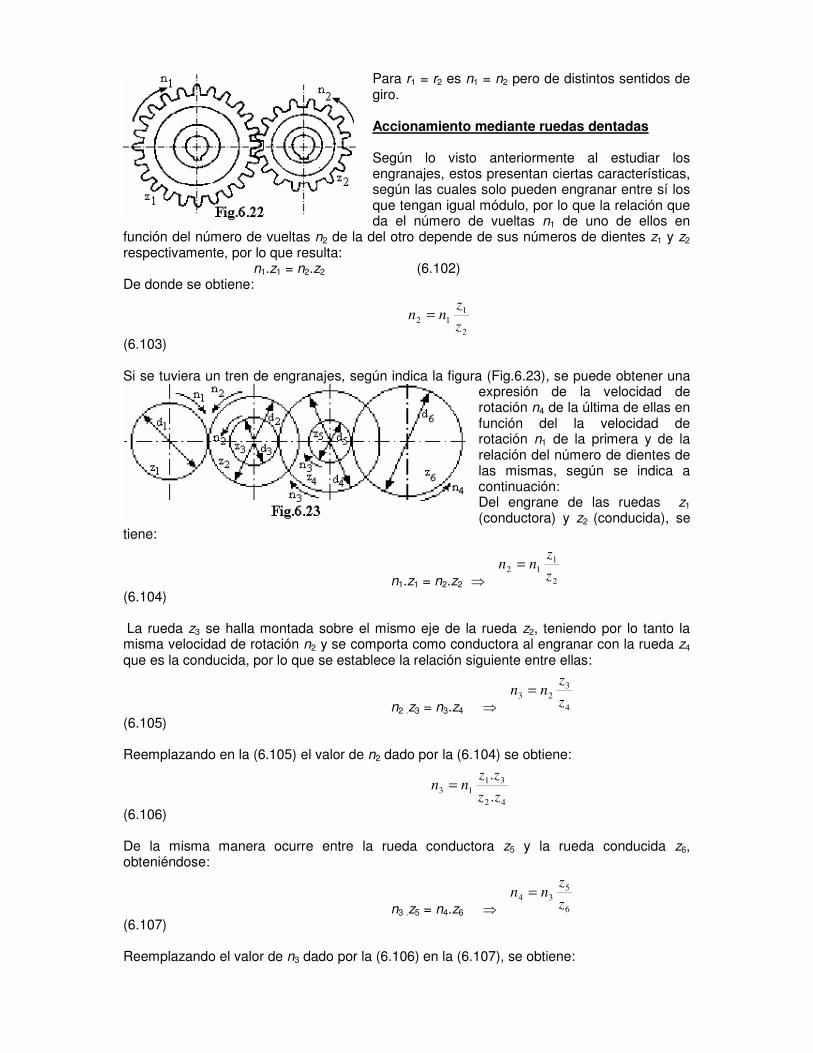
Según sea la combinación de acoplamiento de un sistema de poleas y engranajes se pueden obtener velocidades distintas en el husillo o eje de la máquina herramienta, el cual lo transmite a la pieza o a la herramienta. La figura (Fig.6.25)
muestra un sistema de poleas de diámetros d1, d2, d3 y d4 y un juego de engranajes con una cantidad de dientes de z1, z2, z3 y z4 cada uno. Las poleas de la figura (Fig.6.25 a), que se
encuentran solidarias a un mismo eje j conjuntamente con el engranaje z1, reciben el movimiento a través de una correa C desde la polea d que gira a una velocidad n y se encuentra solidaria al motor eléctrico M, y lo transmiten al engranaje z4, con el que están solidarias solo por la chaveta p, de tal forma que en el eje e de este último engranaje se obtiene la velocidad de rotación nx, que según sea la polea que reciba el movimiento desde d, podrá tomar los valores, según se indica en la misma figura, n1, n2, n3 y n4. Si se retira la chaveta p y se hacen engranar las ruedas dentadas z1 y z4 con las z2 y z3 respectivamente, según muestra la figura (Fig.6.25b), se obtiene la relación de transmisión siguiente:
42
31
.
.
zz
zzJ =
(6.112) Por lo tanto, las velocidades de rotación que se obtienen en el eje e, considerando las velocidades iniciales n1, n2, n3 y n4 y la relación de transmisión J, estará dada por las siguientes expresiones: n5 = n1.J ; n6 = n2.J ; n7 = n3.J ; n8 = n4.J (6.113)
Si al sistema anterior se le agregan dos engranajes más, según muestra la figura (Fig.6.26), se obtendrán, según engranen z1 y z2 o z3 y z4, las relaciones de transmisión J1 y J2 respectivamente, dadas por las expresiones:
62
51
1.
.
zz
zzJ =
(6.114) y
64
53
2.
.
zz
zzJ =
(6.115) Obteniéndose en el eje e, a partir de las velocidades de rotación iniciales n1, n2, n3 y n4 y
las relaciones de transmisión J1 y J2, las velocidades de rotación: n5 = n1.J1; n6 = n2. J1; n7 = n3. J1 ; n8 = n4. J1 (6.116) n9 = n1. J2 ; n10 = n2. J2 ; n11 = n3. J2 ; n12 = n4. J2 (6.117) Caja de velocidades a acoplamiento En este sistema, el cual se muestra en la figura (Fig.6.27), las ruedas dentadas que engranan entre sí son las z1z2, z3z4 y z5z6, realizándose la transmisión del movimiento de las mismas a través de los ejes que se hallen acoplados entre sí. El acoplamiento o desacoplamiento de los ejes en los cuales se encuentran girando los engranajes se realizan en los puntos a, b, c y d, según sea la posición de las palancas p y s. Según sea el acoplamiento que se realiza se obtienen las distintas relaciones de transmisión. En la figura mencionada se puede observar que cuando se acoplan los ejes en los puntos c y b y se desacoplan en los puntos a y d, la relación de transmisión es la siguiente:

632
541
1..
..
zzz
zzzJ =
(6.118)
Para la velocidad de rotación de entrada n en el eje k se obtiene, en el eje de salida e la velocidad de rotación n1, dada por la expresión: n1 = n.J1 (6.119) Si los acoples se realizan entre los puntos a y b y se desacoplan en los puntos c y d, la relación de transmisión es:
6
5
2z
zJ =
(6.120) y la velocidad de rotación n2 es: n2 = n.J2 (6.121) Si el acoplamiento tiene lugar en los puntos c y d y el desacople en los puntos a y b, la relación de transmisión es:
2
1
3z
zJ =
(6.122) y la velocidad de rotación n3 es:
n3 = n.J3 (6.123) Cuando el acoplamiento se realiza en los puntos a y d y el desacople en los puntos b y c, la relación de transmisión es:
4
3
4z
zJ =
(6.124) y la velocidad de rotación n4 es: n4 = n.J4 (6.125) Caja Norton Consiste, según muestra la figura (Fig.6.28), en un tren de engranajes Z1, Z2, Z3..Zi,...Zn, montados sobre un eje, el cual recibe el movimiento de rotación a través de un engranaje desplazable Z a lo largo de un eje paralelo al anterior, el cual engrana con el tren a través una rueda dentada intermedia ZI , la cual se desplaza en forma conjunta con Z y es posicionado en las distintas Zi del tren con la palanca P. El movimiento lo produce la polea motora M la que gira con una velocidad de rotación n, obteniéndose en el eje conducido, según sea la rueda dentada que engrana, una velocidad de rotación ni, que dependerá de la relación de transmisión ii existente en el conjunto Z-Zi. Por lo tanto se pueden escribir las relaciones siguientes:
nn z
znn
z
z
n
ni =⇒==
1
1
1
(6.126)

1
2
1
2
2
−−
=⇒==nn z
znn
z
z
n
ni
(6.127)
2
3
2
3
3
−−
=⇒==nn z
znn
z
z
n
ni
(6.128) ....................................................
i
i
i
i
iz
znn
z
z
n
ni =⇒==
(6.129) .....................................................
11 z
znn
z
z
n
ni n
n
n =⇒==
(6.130)
Por lo general, las velocidades de rotación de los distintos engranajes del tren se obtienen aplicando una metodología determinada, a los efectos de que entre ellas exista una relación que permita obtener una a partir de otra. Por ejemplo, una forma de relacionarlas es mediante una serie geométrica de razón ϕ, la cual se obtiene de hacer:
1
1
1
1
−− =⇒= n
nnn
n
n
n
nϕϕ
(6.131) Por lo tanto, la cantidad de dientes de las ruedas será:
1
1
1
1
−− =⇒= n
nnn
z
z
z
zϕϕ
(6.132) La serie geométrica obtenida para el número de dientes de los engranajes no es perfecta, ya que el número de dientes de éstos no puede ser fraccionario. Por lo general se aconseja:
3
11 ≤z
z
(6.133)

Fileteado o roscado en el torno
El fileteado o roscado para un tornillo, ya sea de sujeción o de movimiento, se lo obtiene mediante el movimiento de rotación de la pieza en la cual se efectúa el roscado, y del movimiento de avance rectilíneo de la herramienta que realiza el trabajo. El avance de la herramienta está en relación con el giro de la pieza, según sea el paso de la rosca o filete que se desee obtener. Para lograr que esta relación sea la adecuada, debe obtenerse entre los elementos que producen ambos movimientos la relación de transmisión correcta. En la figura (Fig.6.29), se muestra un esquema de la disposición de los mecanismos con los que se logra dar un movimiento de rotación a la pieza F y el movimiento de traslación rectilíneo al carro porta herramienta L, y por lo tanto a la herramienta H sujetada por el mismo, los cuales son: 1- Tren de poleas o husillo d1, d2, d3 y d4, y engranajes zi y z’i, que dan el movimiento de rotación al eje principal E del torno donde se encuentra el mandril o morza M que sujeta la pieza F, en la cual se ejecutará la rosca de paso p. 2- El engranaje de transmisión z0, que se encuentra montado en el eje principal E, en el extremo opuesto al mandril M, que pertenece a la cadena cinemática de rotación del tornillo patrón T de paso c, a la que le transmite el movimiento de rotación del eje principal. 3- Conjunto de engranajes za, zb y z’0 para la inversión de la marcha. El engranaje z’0, colocado en el eje inversor I, tiene el mismo número de dientes que z0, y por lo tanto girará su misma velocidad. Este conjunto permite que el eje inversor gire en igual o distinto sentido que el eje principal. 4- Los engranajes z1, zx y z2, que están montados sobre una pieza llamada lira, guitarra o cabeza de caballo, estando z1 montado sobre el eje inversor I, o en su defecto, en un eje auxiliar colocado más abajo, debiendo tener z1 para este último caso igual número de dientes que la z’0 para conservar la misma velocidad de rotación que el husillo. El engranaje z2 montado sobre el eje del tornillo patrón T a quién le comunica el movimiento de rotación. El engranaje zx es de acoplamiento entre z1 y z2, pudiendo ser más de uno si es necesario. El número de dientes de los engranajes de la lira son variables a los efectos de obtener la relación de transmisión necesaria que exige el paso p a construir en la pieza, pudiendo además formar hasta tres planos paralelos. 5- El tornillo patrón T, que tiene un roscado o fileteado de paso c y, que al girar una vuelta completa, hace desplazar longitudinalmente el carro porta herramienta L una distancia p, arrancando la herramienta H en este desplazamiento, una viruta en forma de hélice de paso p de la pieza trabajada F, conformando la rosca. Los engranajes z0 y z’0 tienen igual sentido de rotación si engranan z0-za-z’0; si en cambio engranan z0-zb-za-z’0 tienen distinto sentido de rotación. Cálculo de los engranajes para roscar El engranaje z’0 tiene el mismo número de vueltas que el z0, y por lo tanto que el husillo o eje principal E. Transmite al engranaje z1, por estar en su mismo eje, este mismo número de vueltas. Si sobre el tornillo patrón se coloca un engranaje z2 el que se vincula al z1 con el zx,

se tiene que por cada vuelta del z1 el z2 dará z1/z2 vueltas, constituyendo la relación de transmisión entre el husillo y el tornillo patrón, por lo que el tornillo patrón girará z1/z2. Si el paso del tornillo patrón es c, y al girar una vuelta completa la pieza también gira una vuelta completa, la herramienta avanzará el mismo paso c del tornillo patrón. Si la pieza gira una vuelta completa, pero debido a la relación de transmisión, el tornillo patrón gira solo z1/z2 y, por lo tanto, el carro porta herramienta solo se desplazará (z1/z2).c, por lo que la herramienta se desplazará igual distancia, arrancando una viruta en forma de hélice de paso p, constituyendo el paso de la rosca. Por lo tanto se tiene:
c
z
zp .
2
1=
(6.134) resultando p en la misma unidad de c. La (6.134) se puede escribir de la forma siguiente:
2
1
z
z
c
p=
(6.135) La (6.135) se puede escribir como:
patróntornilloelenconducidaruedaladedientesdenúmero
inversorejeelenconductoraruedaladedientesdenúmero
patróntornillodelpaso
construiraroscaladepaso=
El sistema de medida empleado para obtener el paso del filete o rosca puede ser el SI o el inglés, lo que determinará los tipos de engranajes a utilizar en la cadena cinemática. Además el perfil del filete se obtiene con el perfil dado a la herramienta de corte y puede ser triangular, cuadrada, trapecial, redonda, etc. Las roscas del sistema SI se caracterizan por el valor en milímetros dado al paso. En las de paso inglés, éste se expresa por lo general con el número de filetes o pasos comprendidos en una pulgada de longitud o en número de filetes por pulgada. La relación de transmisión necesaria para el roscado se la puede obtener combinando en la lira: a) dos engranajes, en un plano; b) cuatro engranajes, en dos planos paralelos y c) seis engranajes, en tres planos paralelos. A continuación se indican cada una de las disposiciones mencionadas. a) Caso de dos engranajes en un solo plano: se cuenta con un engranaje de z1 dientes en el eje inversor que gira a n1 vueltas por minuto, igual a la del husillo y de la pieza, y un engranaje de z2 dientes en el eje del tornillo patrón, que gira a una velocidad de n2 vueltas
por minuto, según se muestra en la figura (Fig.6.30a). Por lo tanto se tendrá, de acuerdo a la relación de transmisión:
2
1
1
2
z
z
n
n
c
p==
(6.136)
La figura (Fig.6.30b) muestra los mismos engranajes z1 y z2 engranando a través de otro intermedio zx, el que es utilizado para hacer posible el contacto entre los dos primeros, ya que su distancia entre ejes es invariable, y además para permitir el giro en sentido inverso, pero el mismo no modifica la relación de transmisión.
b) Caso de roscado a cuatro ruedas dispuestas en dos planos paralelos: se utiliza esta disposición cuando no se puede obtener el paso deseado de la rosca con un solo par de ruedas. En este caso, mostrado en la figura (Fig.6.31), se disponen de cuatro engranajes, montados sobre dos planos

paralelos, cuya relación de transmisión está dado por la expresión siguiente:
42
31
1
2
.
.
zz
zz
n
n
c
p==
(6.137) En esta disposición también se utiliza el engranaje zx, el cual no se muestra en la figura, ya que el mismo no modifica la relación de transmisión. c) Caso de roscado a seis ruedas dispuestas en tres planos paralelos: este es un caso poco común, y es utilizado también cuando no es posible obtener los pasos de roscas deseados con los otros dos casos anteriores. Los engranajes se disponen como se indica en la figura
(Fig.6.32). La relación de transmisión está dada por la expresión siguiente:
642
321
1
2
..
..
zzz
zzz
n
n
c
p==
(6.138) Tampoco se ha mostrado el engranaje intermedio zx, el cual puede ser utilizado.
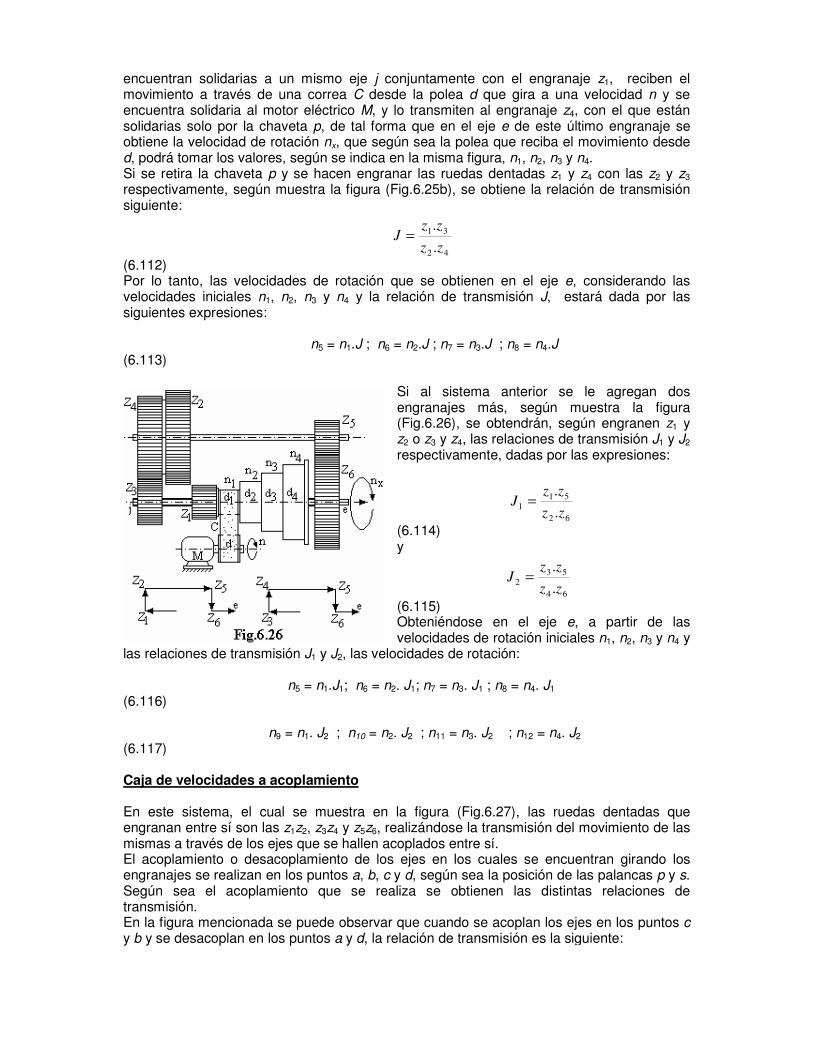
Las disposiciones que se mostraron permite obtener los pasos de roscas tanto en el sistema SI como en el sistema inglés, según sea el paso c del tornillo patrón. Para el caso en el que se tenga que construir una rosca en un sistema determinado, y teniendo el tornillo patrón el paso c en el otro sistema, por ser 127 el primer múltiplo entero de la pulgada en unidades métricas, ya que es: 25,4 x 5 = 127 (6.139) interviene siempre un engranaje de 127 dientes, el cual es uno de los engranajes principales del juego, a los efectos de poder obtener la reducción necesaria. Dispositivos hidráulicos para la transmisión del movimiento Para la transmisión del movimiento utilizando dispositivos hidráulicos se necesita contar con el fluido hidráulico el cual debe poseer las propiedades adecuadas, siendo por lo general un aceite vegetal o mineral; estos dispositivos deben contar como mínimo con los siguientes elementos: una bomba para impulsar el fluido hidráulico, con el caudal y presión necesarios a través del circuito, estando este último constituido por las tuberías a través de las cuales circula el fluido, el motor, que es el órgano que recibe la energía del fluido y la transforma en movimiento rectilíneo o circular uniforme, válvulas de inversión para lograr un movimiento alternativo, válvulas de regulación y de seguridad y otros órganos auxiliares. El Principio de Pascal en el cual se basa el funcionamiento de los sistemas hidráulicos, dice: la presión aplicada a un fluido encerrado en un recipiente se transmite sin disminución a cada punto del fluido y de las paredes del recipiente ejerciéndose en forma perpendicular a la superficie sobre la que actúa. Bombas: existen distintos tipos de bombas, pudiendo ser de caudal constante o de caudal variable según el flujo de fluido que impulsen; según la constitución pueden ser de engranajes, de paletas, de tornillos, centrífugas, de émbolos, etc. Se efectuará el estudio sobre un circuito con una bomba a engranajes gemelos de caudal constante, debiendo el estudiante interesado en los otros casos, remitirse a la bibliografía especializada sobre el tema. En la figura (Fig.6.33) se observa un dispositivo compuesto por dos cilindros que contienen fluido hidráulico, con sus respectivos émbolos, ambos de diferentes diámetros y áreas (A1 y
A2) y conectados entre sí por una cañería de sección a, por la cual circula el fluido. Sobre la superficie externa del émbolo de área A1 se ejerce una fuerza P1, generándose una presión p, la cual al actuar sobre la superficie interna del émbolo de área A2 produce la fuerza P2 cumpliéndose la siguiente relación:
1
2
12
2
2
1
1
A
APP
A
P
A
Pp =⇒==
(6. 140)
Siendo:
4
2
1
1
DA
π=
(6.141) y 4
2
2
2
DA
π=
(6.142) Por otra parte, el caudal Q que circula por el cilindro de área A1 depende de ésta y de la velocidad v1 con que se desplaza el émbolo y por lo tanto el fluido, y está dado por la expresión:
11vAQ = =1
2
1
4v
Dπ
(6. 143) A través del tubo de sección a el caudal es el mismo Q, debiendo aumentar la velocidad para compensar la disminución de la sección, obteniéndose una velocidad v2, estando el caudal dado por la expresión:
2.vaQ = =2
2
4v
dπ
(6. 145) En el émbolo de sección A2, el fluido tiene una velocidad v3, siendo el caudal:
32vAQ = =
3
2
2
4v
Dπ
(6.146 ) De las expresiones anteriores se obtiene:
a
Avv 1
12 =
(6.147) y
2
1
13A
Avv =
(6.148 ) De la (6.140), (6.142) y (6.143) se obtiene:
p
DP
4
2
1
1
π=
(6. 149) La potencia N está dada por la expresión: N = P1.v1 (6.150) Por la (6.149) la (6.150) se puede escribir:

1
2
1 .4
vpD
Nπ
=
(6.151) Por ser el caudal:
1
2
.4
vd
Qπ
=
(6.152) Es: N = Q.p (6.153) Si se tiene en cuenta el rendimiento total de la bomba, ηt el cual varía entre 0,75 y 0,8 se tiene la potencia efectiva del motor que impulsará la bomba: Nef = ηt.Q.p (6.154) Se pude observar, que al ser la presión p y el caudal Q igual en las tres secciones la potencia se transmitiría a través del fluido con igual intensidad, pero se debe considerar la disminución de ésta por la resistencia que opone el rozamiento del propio fluido y de los órganos en movimiento. Por tal motivo se debe tener en cuenta esta disminución al calcular la potencia de la bomba. En la figura (Fig.6.34) se observa un circuito hidráulico el cual funciona de la siguiente manera: la bomba de engranajes PI de caudal constante, aspira el aceite (fluido hidráulico) del depósito
pasando previamente por el filtro F, y lo impulsa a través del tubo A, de la válvula de regulación VR y del distribuidor B. Según sea la posición de la válvula del distribuidor B, el aceite podrá circular por el tubo C o por el tubo D, ingresando a la cámara L o H del cilindro, lo que puede imprimir al émbolo E, y por lo tanto al vástago K solidario al mismo, un movimiento hacia la derecha o hacia la izquierda, respectivamente. Para el caso de la figura, el fluido aspirado por la bomba PI que lo impulsa a través del tubo A con una presión p1 constante, presionando la válvula de regulación VR, la que tiene el objeto de provocar una caída de presión ∆p en el distribuidor B y en el tubo C, pasándose de la presión p1 de la bomba a la presión p2 en el cilindro. El émbolo de la válvula de descarga VS es obligado por
la vena fluida a vencer la resistencia tarada del resorte a una presión ∆p, con lo que deja pasar parte del aceite al depósito a través de la tubería J, por lo que la presión p1 de la bomba se mantiene constante. El caudal principal del fluido, a la presión p2, ingresa a la cámara L del cilindro, moviendo el émbolo E hacia la derecha, venciendo la resistencia R, desplazando al fluido de la cámara H del cilindro por el tubo D, a través del distribuidor B, y de la válvula de contrapresión VC que determina la presión p3 con la cual el fluido regresa a través del tubo G hacia el depósito de aceite. El caudal de una bomba de engranajes está dada por la expresión: Q = 2.π. Dp.m.b.n m3/min (6.155) o también, siendo Dp=z.m
Q = 2.π. z.m2.b.n. m3/min (6.156) Siendo en las expresiones anteriores: Dp: diámetro primitivo en m.

m: módulo de los engranajes, en m. b: ancho de los dientes de los engranajes en m. n: vueltas por minuto de los engranajes. z: número de dientes de cada engranaje. Se tiene que tener en cuenta el rendimiento volumétrico ηv de la bomba, el que varía entre 0,75 a 0,90, resultando por lo tanto: Qef = ηv.Q m3/min (6.157) La potencia de una bomba de engranajes, para la fuerza en Newton y la velocidad en m/s está dada por la expresión:
vPN .= (W) (6.158 ) Por lo tanto, considerando la (6.154) y la (6.155 ), la potencia para la bomba de engranajes, se puede escribir como:
60
.....2 1 tp pnbmDNef
ηπ=
= 30
..... 1 tp pnbmD ηπ
(W) (6.159) O por la (6.156):
30
......
60
.....2 1
2
1
2
tt pnbmzpnbmzNef
ηπηπ==
(W) (6.160) La presión p1 de la bomba del circuito de la figura (6.34), conociendo la potencia Nef del motor eléctrico de accionamiento, el caudal Q necesario de fluido que debe circular y las dimensiones de la bomba se puede obtener de la (6.160):
tnbmz
Nefp
ηπ .....
3021 =
(Pa) (6.161) La presión p2 es: p2 = p1 - ∆ p (Pa) (6.162) y la presión p3, en función de la resistencia R que se opone al avance del vástago es:
3
23a
Rpp −=
(Pa) (6.163) Siendo a3 el área útil de la cara del émbolo, la cual se obtiene restando al área total del émbolo la del vástago. El caudal Q1 que circula por el tubo A, cuya sección es a1, siendo v1 la velocidad del mismo es: Q1 = a1.v1 (m
3/s) (6.164) El caudal que circula con una velocidad v2 por el tubo B, de sección a2 es: Q2 = a2.v2 (m
3/s) (6.165) El caudal Qd que circulará por el tubo G de descarga será:

Qd = Q1 -Q2 = a1.v1 - a2.v2 (6.166) ------------()--------------
Apuntes de clases extractados de la siguiente bibliografía TÍTULO AUTOR EDITORIAL - Aplicaciones de Tecnología Mecánica Felipe. F. Freyre Alsina - Manual del Constructor de Máquinas H. Dubbel Labor - Tecnología Mecánica I y II Pascual Pezzano Alsina - Manual del Ingeniero Hütte II A Academia Hütte Gustavo Gili - Tecnología Mecánica I y II C. E. Thomas Nigar S.R.L. - Manual del Ingeniero Mecánico de Marks Baumeister y Marks Uteha - Máquinas Herramientas Modernas I y II Mario Rossi Científico Médica - Máquinas. Cálculos de Taller A. L. Casillas Máquinas - Manual de correas múltiples en V GOOD YEAR - Mecanismos Hidráulicos J. Faisandier C.E.C.S.A. - Mecánica Técnica y Mecanismos L.A. Facorro Ruiz Melior


















