(697852394) 98834937-PPT-Motores-Paso-a-Paso
62
Instrumenta ción y 1 Motores paso a paso (PAP)
-
Upload
jhan-valeriano-mendoza -
Category
Documents
-
view
10 -
download
2
description
ryu
Transcript of (697852394) 98834937-PPT-Motores-Paso-a-Paso

Instrumentación y
1
Motores paso a paso (PAP)

Instrumentación y
2
• Ventajas– El ángulo de rotación es proporcional a los pulsos de
entrada.– Exactitud en la posición y repetición de movimientos.
Los motores PaP tienen un error de 3 a 5% del paso y dicho error no es acumulativo de un paso a otro.
– Excelente respuesta ante arranque, parada y reversa.– Confiable, no existe contacto de escobillas en el
motor.– El motor responde a pulsos de entrada digitales, lo
que permite un control de lazo abierto, haciendo un control más simple y barato.
– Pueden tener un gran rango de velocidades de rotación, dado que la misma es proporcional a la frecuencia de los pulsos de entrada.

Instrumentación y
3
• Desventajas
– Puede ocurrir un fenómeno de resonancia si el motor no es controlado adecuadamente.
– Muy difícil de operar a altas velocidades.

Instrumentación y
4
• Tipos de motores paso a paso:
– De reluctancia variable, también llamados de reluctancia conmutada, tienen rotores dentados de hierro dulce
– De imán permanente, tienen magnetizado el rotor.
– Híbridos, son una combinación de las dos tecnologías anteriores.

Instrumentación y
5
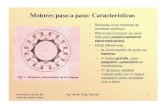
Reluctancia Variable
Tienen de 3 a 5 bobinas conectadas a un terminal común.
El rotor en este motor tiene 4 dientes y el estator tiene 6 polos; con cada bobina arrollada sobre polos opuestos.
Motor de tres bobinas, de y 30 grados por paso

Instrumentación y
6
PAP de Imán Permanente
• Un ip o la r e sEl arrollamiento número 1 es distribuido entre la parte superior e inferior de los polosdel estator, mientras el arrollamiento número2 es distribuido entre los polos izquierdos y derechos de motor.
El rotor es un imán permanente con seis polos, tres polos norte y tres polos sur

Instrumentación y
7
• B i p o l a r e s :
La bobina 1 del motor es distribuida entre la parte superior e inferiordel estator, mientras que la bobina 2 del motor esta distribuida entre los polos izquierdos y derechos del estator
La figura ilustra un motor bipolar de 30 grados por paso
El rotor es un imán permanente con 6 polos, 3 sur y 3 norte alineados a su alrededor en circunferencia.

Instrumentación y
8
• Bobinados Bifilares
Cada bobina esta compuesta por 2 cables
Se pueden controlar como motores bipolares o unipolares dependiendo de la conexión serie o paralelo de sus bobinas.
Una conexión paralelo (bipolar) permite operar con alta corriente, mientras que una conexión serie (unipolar) permite operar con alta tensión.

Instrumentación y
9
• Motores Híbridos
El rotor de un motor híbrido es multidentado como el motor de reluctancia variable, y contiene un imán axialmentemagnetizado yconcéntrico alrededor de su eje.

Instrumentación y
1
Microstepping
• Cuando el motor funciona de a pasos enteros
Baja Resolución Transiciones Bruscas
Movimiento Corcoveante
El microstepping, se basa en el principio de transferir la corriente de una espira a otra gradualmente. Esto se logra con PWM de la tensión en las bobinas. El ciclo de trabajo de la señal que energiza a una bobina crece, mientras que en otra bobina decrece.

Instrumentación y
1
• En un motor ideal, el microstepping puede ser usado para alcanzar una resolución angular arbitrariamente pequeña, pero en la práctica la fricción y los apartamientos de la curva torque sinusoidal ideal versus ángulo del eje lo hacen impracticable.
• En la práctica raramente vale la pena subdividir el paso de un motor en más de 32 microsteps. Con este valor, podemos hacer incrementos de0.23 grados usando un motor económico de imán permanente con 7,5 grados de paso.Podemos lograr la misma resolución usandouna caja reductora de 1:32.

Instrumentación y
1
Factores de selección
• Torque:– En todos los motores, el torque decrece con la
velocidad, pero esta caída es menos pronunciada en los MRV Con un apropiado diseño se logran velocidades de 10.000 pasos por segundo; mientras que pocos motores de imán permanente o híbridos brindan un torque útil a 5.000 pasos por segundo (la mayoría está confinada a velocidades por debajo de1000 pasos por segundo) la baja disminución deltorque con la velocidad en los MRV permite el uso de estos motores sin necesidad de cajas reductoras.

Instrumentación y
1
• Los motores de reluctancia variable (MRV)tienen un diseño simple, pues no requieren de un complejo rotor de imán permanente y son generalmente más robustos.
• Los MRV son mucho más ruidosos que los de imán permanente o híbridos.
• Los MRV no son aptos para microstep, (posicionado en fracciones de paso).
• Se requiere un limitador de corriente complejo para hacer alcanzar altas velocidades a los MRV.

Instrumentación y
1
• Para los motores PAP de imán permanente ehíbridos existe disponibilidad de unipolares, bipolares y de bobinados bifilares; estos últimos pueden ser usados en la configuración unipolar o bipolar.
• ¿Unipolares o bipolares?• La elección entre unipolar o bipolar se basa en
la simplicidad del controlador y la relación entre la potencia, y el peso.
• Los motores bipolares tienen aproximadamente30% más de torque que su equivalente unipolar dado cierto volumen.

Instrumentación y
1
• Los motores bipolares requieren unaelectrónica de control más compleja, lo que tendrá impacto en el costo de la aplicación.
• Ante la duda, bobinados bifilares son una buena opción, ya que estos pueden ser configurados como unipolares o bipolares.

Instrumentación y
1
• ¿Imán Permanente o Híbridos?• Los temas fundamentales a tener en cuenta son
costo y resolución.• El mismo control electrónico y conexionado es
aplicable a ambos tipos de motores.• Los motores de imán permanente son los de
menor costo• Los MIP se fabrican en pasos de 3,6º a 30º• Los MH se consiguen en pasos menores a 1,8º• Los MH permiten velocidades superiores a los
MIP pero por debajo de los 5000 pasos x seg.

Instrumentación y
1
• Características Funcionales• Tamaño del paso
– En los MIP los pasos más comunes son entre7.5º y 3.6º, correspondiendo de 48 a 100 pasos.
– En los MH, el tamaño de paso típico va de 3.6 a 0.9 grados, es decir de 100 a 400 pasos por revolución
– En los MRV se consiguen pasos de alrededor de 1 grado.

Instrumentación y
1
Torque• H o l d i n g torque : es el torque requerido para girar
el motor cuando éste se encuentra energizado.• P u ll i n torque : es el torque de carga con el que un
motor puede acelerar desde cero sin perderpasos cuando es controlado a una tasa constante de pasos.

Instrumentación y
1
• Pull out torque: es la carga que un motorpuede mover a una determinada velocidad de operación.
• D e t en t t o r que : es el torque requerido para rotar el eje mientras los arrollamientos no están energizados.

Instrumentación y
2
Longevidad:• Otro de los factores a considerar al
momento de elegir un motor, es la longevidad. Algunas de las preguntas a hacerse son:
• Cuánto tiempo funcionará el motor apropiadamente?
• A qué condiciones ambientales estará sujeto el motor?
• A qué temperatura trabaja el motor?• Trabajará constante o intermitentemente?

Instrumentación y
2
• Rodamientos vs. Bujes de bronce: los rodamientos duran más que los bujes y generan menos calor, pero son más caros.
• Los motores deben elegirse de manera tal que trabajen del 40 al 60 % de su torque máximo.
• Proteger el motor de medio ambientes abrasivos:humedad, agentes químicos, suciedad, etc.
• Adecuada refrigeración: Para motores que ya incluyan disipadores de calor, debe asegurarse la circulación del aire. En particular, los motores híbridos son particularmente sensibles al calor.
• Finalmente, los motores deben ser manejados apropiadamente. Debe tenerse especial cuidado en que no se excedan las corrientes en las bobinas.

Instrumentación y
2
• Funcionamiento
Para el manejo, se utiliza un control de corriente bidireccional o bipolar. Conjuntamente con un direccionamiento adecuado, en secuencias, de la corrientepor ambas bobinas selogra que motor rote controladamente.

Instrumentación y
2
• En principio se energizan las bobinas en lasecuencia AB/CD/BA/DC. Esta secuencia de pasos completos se conoce como ”one phase on” (sola una bobina activa). Una sola bobina es la que entrega el par necesario.

Instrumentación y
2
• Otra posibilidad es de energizar dos bobinas almismo tiempo, en este caso el rotor se alinea entre las posiciones de los dos polos. Este modo de operación se llama “two phase on” y es el que se utiliza habitualmente para el control de motores bipolares dado que el mismo maximiza el torque entregado.

Instrumentación y
2
• Una tercera opción es utilizar las dos anterioresen forma conjunta, logrando ubicar el rotor en un polo, luego entre los polos y rotar nuevamente hacia el segundo polo. Este modo de operación se denomina “half step” dado que el mismo se mueve en incrementos de medio paso.

ns uI tr mentación 2
Comunicaciones
Micropasos y secuencia de controlUn motor PaP bifásico, tiene dos bobinas dispuestas en forma tal que producen los flujos magnéticos a 90° geométricos uno respecto del otro
Si se energiza la bobina 1, el rotor del motor llega a una posición de equilibrio alineándose con el campo magnético generado por dicha bobina.

Instrumentación y
2
Excitando la bobina 2, el campo resultante gira 90° geométricos, con lo cual, el rotor realiza un desplazamiento angular igual al paso “P” del motor
El flujo magnético entre el rotor y el estator originan fuerzas (cupla de retención) que tienden a mantener al rotor en posiciones de equilibrio cada paso del motor.

Instrumentación y
2
Excitando las dos bobinas en forma simultanea, el rotor intentará alinearse con los dos campos magnéticos generados y, debido a la naturaleza vectorial de los mismos, encontrará una posición de equilibrio en dirección al vector resultante de los dos campos

Instrumentación y
2
Una forma de controlar en forma secuencial las corrientes que circulan por las bobinas, es utilizar modulación por ancho de pulso (PWM)
En posiciones intermedias entre pasos, las fases del motor se alimentan mediante un tren periódico de pulsos rectangulares, variando el ciclo de actividad de los pulsos, se varía el valor medio de la tensión resultante en el tiempo, con lo que se modifica la cantidad de corriente circulante por las espiras de los bobinados.

Instrumentación y
3
Se ilustra un ejemplo de un ciclo de actividad de 3/4 del período T, con lo que se obtiene un valor medio resultante equivalente a las 3/4 partes de la tensión aplicada.
En forma analítica, el valor medio de tensión se puede calcular planteando la igualdad de áreas A1 y A2 durante el período T del pulso rectangular.
(T
Donde:V – Valor medio de tensión
− T 4) ∗ (Vcc
− V ) = T
∗V4
resultante.Vcc – Tensión pico del pulso. V = 3 ∗ V cc
4

Instrumentación y
3
Planteando el problema en forma mas general, se llega a la siguiente expresión
Donde:
V = Vcc
∗ (1 − n )
m
n/m - Porción del período T.V - Valor medio de tensión resultante. Vcc - Tensión pico del pulso.Se observa en eq (3), que, fijando un valor m, el valor medio de tensión resultante es proporcional a los valores de n. Para un número “m” determinado, se puede variar linealmente el valor medio de tensión dando distintos valores a n.

Instrumentación y 32Comunicaciones Industriales

Instrumentación y 33Comunicaciones Industriales