ACT SPA

of 14
Transcript of ACT SPA
-
7/25/2019 ACT SPA
1/14
TECNOLOGIADELAREGULACIONAUTOMATICA
INTRODUCCIONEste laboratorio ha sido desarrollado con el objetivo de introducir los estudiantes a los principios fundamentales de la
tecnologia de la regulacin automtica. Las funciones fundamentales de los procesos, de los controladores y de los
sistemascontrolados,asmismocomo interaccionesentre loselementosdetransferenciade losanillosderetroaccin,
estndemotradas
con
el
auxilio
de
la
simulacin
de
un
sistema
controlado.
Loscomponentes individualesy losdiagramasdebloquesde loscircuitosestnrepresentadossobrepanelesfrontales.
El laboratorio ha sido funcionalmente dividido en un cierto numero de secciones, en manera que el estudiante pueda
seguirunaadecuadaformacindidctica,condificultadescrecientesdesde lateorahasta lasaplicacionespracticas.Las
seccionesqueconstituyenellaboratoriosonlassiguientes:
Fundamentosdelatecnologa delaregulacinautomticaTeoradelaRegulacinAutomtica TEO
Procesos PRO
Controladores PID
ControlAutomticoContinuo CAC
ControlAutomtico
Discontinuo
DAC
APLICACIONESControldeunmotorenCC MOT
Controldetemperatura TEM
Controldeluminosidad LUM
Controldenivel LEV
Controldecaudal FLO
FUNDAMENTOSDELATECNOLOGIADELAREGULACIONAUTOMATICATEOTeoradelaRegulacinAutomtica
AntesdeafrontareldesarrolloexperimentalreferentealosProcesos,losControles,latcnicadelaRegulacinAutomtica
ContinuayDiscontinua,hastalaanlisisdeespecficosControlesdeProcesos,estilproveerunasntesisdelosconceptos
fundamentalesrelativosa la"Teorade laRegulacinAutomtica",necesariosparaunacorrectacomprensinde loque
trataremosacontinuacin.Losargumentosafrontadosenestaseccinson:
Definicionesgenerales
Representacingrficadelossistemasdecontrol
Subdivisindelossistemasdecontrol
Formacannicadelossistemasconretroaccin
Funcionescannicasycaractersticasdelossistemasdecontrol
Anlisisyproyectodelossistemasdecontrol
Accinproporcional(P)
Accin
integral
(I)
Accinderivativa(D)
Accincombinada(PID)
Predisposicindelcontrolador
PROProcesos
Enestaseccinexperimentalelestudiantepuedeanalizarloscomportamientostpicosdelosprocesos:lascaractersticas
detransferencia,elcomportamientoenrgimentransitorio,lasconstantesdetiempo,losprocesosdel1y2orden, los
procesosdeordensuperior,etc.
-
7/25/2019 ACT SPA
2/14
TECNOLOGIADELAREGULACIONAUTOMATICA
Elconocimientodelascaracteristicastpicasdelprocesoesdefundamentalimportanciaafindeuncorrectoacercamiento
aldiseodeunsistemadecontrol.
Porestemotivo,antesdeestudiarloscomportamientostpicosdeloscontroladores,seponenecesarioanalizartodaslas
posiblescaractersticasqueunproceso,afindecontrolarlo,puedapresentarenlapractica.
Losprocesos
analizados
en
esta
seccin
son:
ProcesosdetipoP
ProcesosdetipoI
ProcesosdetipoI2
Procesosdel1orden
Procesosdeordensuperioral1
PIDControladoresEn eta seccin experimental el estudiante puede analizar las caractersticas y los comportamientos tpicos de los
controladores: linealidad, proporcionalidad, comportamiento dinmico, ganancia, valores convencionales, frecuencia
crtica,fase,
etc.
Luegohaberanalizado loselementosindividualesP,IyD,elpuedeestudiar lascombinacionesentreellos,PI,PD,yPIDy
podrrealizarsealasconfiguracionesenparalelo,sealasconfiguracionesenserie.
El conocimientode las caractersticas tpicasde los controladoresesdefundamental importanciaafindeun correcto
acercamientoaldiseodeunsistemadecontrol.
Loscontroladoresanalizadosenestaseccinson:
-ControladorP
-ControladorI
-ControladorD
-ControladorPI
-ControladorPD
-ControladorPID
-
ControladorPD
-ControladorPID
CACRegulacinAutomticaContinuaLuegolasseccionesexperimentales,enlascualeshansidoanalizadasendetalleslascaractersticasyloscomportamientos
tpicosde losprocesosyde loscontroladores,empezamosunanuevaseccinen lacualprocesosycontroladoresestn
oportunamente combinados para simular y estudiar las problemticas ms comunes de la Regulacin Automtica
Continua.
Laanlisisdelasinteracionesentrereguladoresyprocesosestcomplicadaporlaposiblepresenciadeinterferencias.
Estas, tal vez, pueden cebar una serie de oscilaciones con consecuencias, tambin graves, para el proceso.
Enesta
seccin,
adems
de
analizar
las
interacciones
entre
reguladores
yprocesos,
el
estudiante
puede
estudiar
las
causas
delasinestabilidadessusodichas,afindepoderencontrarlosposiblesremedios.
Lostratadosenestaseccinson:
RegulacinPdeunprocesodetipoP
RegulacinPdeprocesosdelI,2,3y4orden
RegulacinIdeprocesosdel2ordenydetipoI
RegulacinP,PD,PI,yPIDdeunprocesodeordenelevado:estabilidadyoptimizacin
RegulacinP,PD,PI,yPIDdeunprocesodeordenelevado:predisposicindelosparmetrossegnZieglerNichols
(mtododinmico)
RegulacinP,PD,PI,yPIDdeunprocesodeordenelevado:predisposicindelosparmetrossegnChineHronesReswick
(mtodoesttico)
RegulacinP,PD,PI,yPIDdeunprocesodeordenelevado:configuracinparalelayenserie
-
7/25/2019 ACT SPA
3/14
TECNOLOGIADELAREGULACIONAUTOMATICADACRegulacinAutomticaDiscontinuaLuego lasseccionesexperimentalesen lascualeshansidoanalizadosendetallecaractersticas, comportamientosy
problemticasde la regulacinautomtica continua, empezamosunanueva seccin en la cual estan simulados y
analizados lossistemasderegulacinautomticadiscontinua,en loscuales,esdecir,elcontroladorestacompuesto
porunelementoaintervencindiscontinuo.
Uncontrolador
discontinuo
esta
caracterizado
por
una
salida
que
presenta
dos
oms
estados
fijos
ysu
valor
esta
conmutadoentreestosestados,asegundelvalordeentrada.
Losargumentostratadosenestaseccinson:
- Controladoresdedosposiciones,controladoresdetresgamas
- Tecnicasdeadquisicindemuestreo
- ElcontroladordedosposicionesenunprocesodelIorden
- Elcontroladordetresgamasenunprocesodel2orden
- Elcontroladordedosposicionescon"feedback"atrasadoenunprocesodel2orden
- Elcontroladordedosposicionescon"feedback"elsticoenunprocesodel2orden
- Elcontroladordemuestreoenunprocesodel4orden
APLICACIONES
Terminadas las secciones experimentalesdedicadas a la anlisis yprueba de: Procesos, Controladores, Regulacin
Automtica Continua, Regulacin Automtica Discontinua, podemos considerar completada la adquisicin del
conocimientoterico experimentalnecesarioparalaaplicacinpracticaafindeaplicarlaenlosprocesosreales.Los
experimentosdelaboratorioqueestnpropuestosenestaseccinconstituyenunpasajedetrabajoestructuradocon
elfinde estimular losestudiantes en laaplicacinde loquehanaprendido en las seccionesprecedentes.Enesta
manera queremos educar activamente los estudiantes en la bsqueda de la solucin ms apropiadapara aquel
particulartipodecontroldeprocesorealbajoevaluacin.
MOT
ControldeunmotorDCLosargumentostratadosenestaseccinson:
-
Controles
P,
PI,
y
PID
de
velocidad
de
un
motor
CC
utilizando
el
mtodo
CHR
TEM
ControldetemperaturaLosargumentostratadosenestaseccinson:
Elcontroladordedosposicionesenunprocesodetemperatura
Elcontroladordedosposicionescon"feedback"atrasadoenunprocesodetemperatura
Elcontroladordedosposicionescon"feedback"elsticoenunprocesodetemperatura
Elcontroladordetresgamasenunprocesodetemperatura
ControladoresP,PI,yPIDenunprocesodetemperaturautilizandoelmtodoCHR
LUM
ControldeluminosidadLosargumentostratadosenestaseccinson:
-ControlesP,PIyPIDdelaluzutilizandoelmtodoCHR
LEV
ControldenivelLosargumentostratadosenestaseccinson
-ControlesP,PIyPIDdenivel
FLO
ControldecaudalLosargumentostratadosenestaseccinson
ControlesP,PIyPIDdecaudal
-
7/25/2019 ACT SPA
4/14
TECNOLOGIADELAREGULACIONAUTOMATICA
LOSMODULOS
FuentedeAlimentacinCC
DL2613
Fuentedealimentacin
estabilizadapara
laboratoriocon
dos
salidas.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Corrientede
salida:
2,4
A
(3A
por
un
corto
tiempo).
Alimentacin:monofsicadered(verlaplacade
identificacin)
Completacondosled(+15V;15V)yuninterruptor
principalconlmparapiloto.
GeneradordeVoltajedeReferencia
DL2614
Adecuadoparala
realizacindeunasealde
referenciaatravsdeun
potenciometrointernoo
porlatransferenciadeuna
sealexternade
referencia.
Posibilidaddegenerar
voltajedepasos.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadelasealdereferenciaaregulacincontinua:
de 10Va+10V
de0a+10V
Rangodelasealdereferenciadepasos:
de 10Va+10V
de0a+10V
Interruptorparaseleccionarentrelasealdereferenciadel
potencimetrointernoylasealdereferenciaexterna
Interruptorpara
seleccionar
entre
el
rango
0/10
V
yel
rango0/+10V
ControladorPID
DL2622
Controlestandarindustrial
paraelusocomo
controladorP,PI,PD,o
PIDencontroles
continuosdelazocerrado.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Nudosumadorenentradaparadosvariablesdiferentesde
referenciaURyUCyparaunavariablecontroladaUA.
Gamadevoltajedelaseal:10V....+10V
Parmetrosdelcontroladorregulableconcontinuidad
Gananciaproporcional:Kp=0...1000
Tiempode
la
accin
integral:
TI
=1ms
...
100s
Tiempodelaaccinderivativa:TD=0.2ms...20s
Entradadepuestaacerodelreguladorintegral.
Nudosumadorensalidaparasumarosubstraervariables
dedisturbo.Bornesdemedidadesealdeerror.
Tornilloderegulacindeloffsetensalida.
Indicadoratresleddelsentidodedesviacin.
RegulacingruesayfinadelagananciaproporcionalKp,del
tiempodelaaccinintegralTIydeltiempodeaccin
derivativaTD.
Indicadordesobrecarga:ledoverencendidocuandoel
voltajedesalidaestsuperiora10Voinferiora10V.
EntradaIoff
para
el
reset
del
regulador
I.
-
7/25/2019 ACT SPA
5/14
TECNOLOGIADELAREGULACIONAUTOMATICA
ControladorP
DL2670
Controladordeaccin
proporcionalaptoparalos
sistemasdecontrolcontinuo
delazocerrado.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadevoltajedelaseal:10V,....,+10V
GananciaproporcionalKp=0...100
Regulacingruesa
con
interruptor
de
tres
posiciones
Regulacinfinapotenciomtrica.
Ledindicadordesuperacinderango.
Elementode
accin
integral
DL2671
Controladorde
accin
integralaptoparalos
sistemasdecontrolcontinuo
delazocerrado.
Caractersticastcnicas
Alimentacin:+15V;0V;15V
Gamadevoltajedelaseal:10V,...,+10V
CoeficientedelaaccinintegralKI=0.1....100s1
Regulacingruesaconinterruptordetresposiciones.
Regulacinfinapotenciomtrica.
Entradaresetdeaccinintegral.
Desviadorparainclusin/exclusindeaccinintegral.
Ledindicadordesuperacinderango.
Elementodeaccinderivativa
DL2672
Controladordeaccin
derivativaaptoparalos
sistemasdecontrol
continuodelazocerrado.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadevoltajedelaseal:10V,...,+10V
CoeficientedelaaccinderivativaKD=2ms....2s
Regulacingruesaconinterruptordetresposiciones.
Regulacinfinapotenciomtrica.
Desviadorparainclusin/exclusindeaccinderivativa.
Ledindicadordesuperacinderango.
-
7/25/2019 ACT SPA
6/14
TECNOLOGIADELAREGULACIONAUTOMATICA
Nudosumadordedosentradas
DL2673
Nudosumadordeentradas,
unaentradanoinversoray
unaentradainversora.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadevoltajedelaseal:10V,...,+10V
Factordeganancia=1
Ledindicador
de
superacin
de
rango.
Nudosumadordecincoentradas
DL2674
Nudosumadordecinco
entradas,delascualestres,
noinversoras,puedenser
utilizadasenla
construccinde
particulares
configuracionesdel
regulador,empleandolos
elementosP,IyD
separadamente;las
restantesentradas,una
inversorayuna
no
inversora,puedenser
utilizadasparasumarlas
variablesdeinterferencias.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadevoltajedelaseal:10V,...,+10V
Factordeganancia=1
Ledindicadordesuperacinderango.
Sistemadecontrolsimulado
DL2675
Permitelasimulacinde
diferentesprocesos,como:
procesosdel1ydel2
orden,procesosdeaccin
proporcional(P),proceso
deaccinintegral(I),
procesode
doble
accin
integral(I2).
.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Nudosumadorenentradaparalavariablederegulacin
(y)ylavariabledeinterferencia(z).
Gamadevoltajedelaseal:10V,...,+10V
CoeficientedelaaccinproporcionaldelprocesoKP=0.2
(atenuacin)....1.5
(amplificacin)
ConstantedetiempoT1=0.1....1000s
ConstantedetiempoT2=0.1....1000s
Entradaderesetparaelrestablecimientodelas
condicionesiniciales.
Regulaciongruesaconinterruptoresrodantes.
Regulacinfinapotenciometrica.
Ledindicadordesuperacinderango.
-
7/25/2019 ACT SPA
7/14
TECNOLOGIADELAREGULACIONAUTOMATICA
Elementoderetardo
DL2676
Permitelainsercindeun
tiempomuertoreal
regulableenlosprocesos
quesoncaracterizadospor
esto.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadevoltajedelaseal:10V,...,+10V
CoeficienteproporcionaldelmoduloKS=1
Tiempomuerto
Tt
=10
ms
....
100
ms
/100
ms
....
1s
Regulacingruesayexclusindeltiempomuerto,con
interruptorde3posiciones.
Regulacinfinapotenciomtrica.
Ledindicadordesuperacinderango.
Elementodetransferenciadelsegundoorden
DL2677
Permitedeanalizarelcomportamientodeun
elementoconfuncinde
transferenciaproporcional
encondicionesdeoscilar,
conretardodelsegundo
orden,seaeneldominio
deltiempo,seaenel
dominiodelafrecuencia.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadevoltajedelaseal:10V,...,+10V
Factordeganancia=1
ConstantedetiempoT=10ms....30s,conposibilidadde
seleccionarlaatravsdedosinterruptoresrodantes.
Coeficientedeatenuacind=0....3,conregulacin
potenciometrica.
Entradaderesetparaelrestablecimientodelas
condicionesiniciales.
Ledindicadordesuperacinderango.
InterruptorManual/Automatico
DL2678
Permiteelcierredellazode
control,sinoscilaciones,
despusunaadecuada
calibracindelsistema.
Estconstituidoporun
nudosumadoralcualestn
conectadasla
seal
procedenteporun
potencimetro(modo
manual)ylaseal
procedenteporel
controlador(modo
automtico)quesepuede
insertaratravsdeun
interruptor.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadevoltajedelaseal:10V,...,+10V
Interruptormodomanual/modoautomtico.
Potencimetromodomanual.
Nudosumadorensalida.
-
7/25/2019 ACT SPA
8/14
TECNOLOGIADELAREGULACIONAUTOMATICA
Controladordedosposiciones
DL2679
Controladordedos
posicionesparacontroles,
enlazocerrado,detipo
discontinuo.Estprovisto
deun
nudo
sumador
en
entradaalcualestn
conectadaslavariablede
referencia(entradano
inversora)ylavariable
controlada(entrada
inversora).Atravsdedos
ledsevisualizaelestado
binariodelcontroladordel
cualestdisponiblevariarla
histresis.Elcontrolador
estdotadodedossalidas
binariasde
voltaje
diferenciado.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Nudosumadorenentrada
Gamadevoltajedesalida:10V,...,+10V
Voltajesde
salida:
0/+5
V
;0/+10
V
Histresisregulable:0....2.5V.
Elementodemuestreo
DL2680
Utilizadoparahacer,en
mododiscontinuo,un
muestreodelaevolucin
delcontrolcontinuo
actuadoenunproceso.
Lafrecuenciademuestreo
puedesersuministradapor
elgenerador
incluido
en
el
mdulooporunaseal
externa.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadetensindelaseal:10V,...,+10V
Frecuenciademuestreo:0,2....20Hz
GrupoMotorGenerador
DL2681
Procesoparaelcontroldela
velocidaddeunmotoren
CC.Unmotorelectricoyun
generadorestn
acoplados
atravsdeunvolanteafin
deaumentarelmomento
deinerciadelentero
sistema.
Untransductordela
velocidaddelmotorprovee
unasealdigitalde
retroaccin;atravsdeun
convertidorD/A,estaseal
estdisponibletambinen
elformatoanalgico.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Potenciaelctricadelmotor:alrededor10W
Velocidadmxima
del
motor:
3000
rpm
Potenciadesalidadelgenerador:alrededor4W
Voltajedesalidadelgenerador:0....20Vcc
Salidadigitaldeltransductordevelocidad:
60implusos/revoluciones
Salidaanalgicadeltransductordevelocidad:
1V/1000rpm.
-
7/25/2019 ACT SPA
9/14
TECNOLOGIADELAREGULACIONAUTOMATICA
Carga
DL2682
Desarrolladoafindeaplicar
unacargaalasmquinas
elctricasconsalidasdedos
polos;puedesercontrolado
seamanualmente
sea
automaticamente.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Voltajeenentrada:max.220Vca
Carga:3lamparasdeincandescencia.
Tresinterruptores
para
los
mandos
automaticos
de
la
carga.
Reldecontrolelectrnicoparamandosautomticosdela
carga.
Conjuncionesdeseguridadseaparalaconexindelvoltaje
deentrada,seaparalaconexindelvoltajerectificadoen
salida.
Reguladordelagananciaydeloffset
DL2625
Permitelaadaptacin
proporcionaldelas
sealesexternasalos
normalesvoltajes
utilizadosenlossistemas
decontrolautomtico.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Intervalodevoltajedelasealenentrada:50V,...,+50V
Nivelregulableatravselajustedelaganancia:
0....1,0....10,0....100
Atenuacindelassealespulsativas.
Constantesdetiempo:0,1....10ms;10....100ms
Voltajesdeoffsetquesepuedenconectar:
10V....+10V
Regulaciongruesaconinterruptoresrodantes.
Regulacinfinapotenciomtrica.
Amplificadordepotencia
DL2684
Compuestopordos
amplificadores,unono
inversoryunoinversor,
congananciadevoltaje+1
e
1
respectivamente.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadevoltajedelaseal:10V,...,+10V
Tensindesalida:10V....+10Vrespectoatierra
0
....
20
V
simetricamente
Potenciamax.ensalida:30W,conproteccincontracorto
circuito.
-
7/25/2019 ACT SPA
10/14
TECNOLOGIADELAREGULACIONAUTOMATICA
Sistemaparaelcontroldetemperatura
DL2685
Procesoparaelcontrolde
latemperatura,aptopara
analizarregulacionesen
lazocerradodetipo
continuoydiscontinuo.
Unalmparaalgena
constituyeelelementode
calefaccin:unsensorPTC
proveelasealde
retroaccin.
Unventiladoryunavalvuladecierrepermiten,ademas
delconseguimientodeuniformidaddetemperatura
entredeterminadoslimitesdeseguridad,tambinla
insercindevariablesdeinterferencias.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Temperaturamax:100C
Temperaturadeinvervencindelinterruptorde
seguridad:90....100C
Sealderetroaccin:
2mA/10C
1V/10C
TiempomuertoaparenteTU:alrededor10s
TiempodecompensacinTG:alrededor120s
Sistemasparaelcontroldeluminosidad
DL2686
Unalmparade
incandescenciaconstituye
elelementoopto
transmisor,mientrasun
fototransistor esel
elemento optoreceptor.
Diferentessonlas
posibilidadesparagenerar
variablesdeinterferencias.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Gamadevoltajedelaseal:0...20V
Sealensalida:0....10V
Potenciamxima:10W
Generadordefunciones
DL2687
Generadordefunciones
como:pulsodeDirac,
ondacuadrayonda
triangularconposibilidad
deseleccionarlasatravs
deunselector.Enalgunas
borneslasealdesalida
esde
amplitud
fija;
en
otraslaamplitudpuede
serreguladacon
continuidad,desde0V
hasta10V,atravsdeun
potenciometro.La
frecuenciapuedeser
reguladaconcontuinidad
desde0.02Hzhasta10Hz,
conpotenciometro.Para
laondacuadraesposible
regularlarelacinentre
sealalta
yperiodo,
escogidoentre1/2y9/10.
CaractersticastcnicasAlimentacin:+15V;0V;15V
Formasdeondadesalida:
FuncindepulsodeDirac:0....+10VP
Funcindeondatriangular:0....20VPPequilibrada
respectotierra
Funcindeondacuadra:0....20VPPconrelacinseal
alta/periodo=1/2
Funcindeondacuadra:0....+10VPconrelacinseal
alta/periodo=9/10
Frecuenciadesealdesalida:0.02....10Hz
Sealloffparaelresetdeloscontroladoresintegrales.
-
7/25/2019 ACT SPA
11/14
TECNOLOGIADELAREGULACIONAUTOMATICA
Depsitoconbomba
DL2688
Utilizadoencombinacin
coneldepsito derelleno.
CaractersticastcnicasCapacidaddeldepsito:alrededor 1.5l
Gamadevoltajedelaseal:0...+10V
Consumodepotenciadelabomba:10Wmax.
Depsitoderelleno
DL2689
Utilizadoparala
demostracindelas
caracteristicasdelsistema
controlado.
Vlvulasdedeslizamiento
permitendemodificarla
configuracindelsistema
controlado.
Incluyedispositivos"plug
in"paralossensores
utilizadosenlamedidadel
niveldelliquido.Incluye,
adems,unconjuntode10
hojastransparentes,
graduadasconunaescala
horizontalyuna
vertical,
paraunagrabacinmanual
delascaractersticasdel
sistemacontrolado.Aptasal
utilizoderotuladores
solublesenagua.
CaractersticastcnicasCapacidaddeldepsito:alrededorde1l
Transductordepresindiferencial
DL2690
Utilizadoparamedirel
niveldelquido,si
conectadoaltubode
inmersin,yparamedirel
caudal,
si
est
conectado
al
orificiodemedida.
CaractersticastcnicasAlimentacin:15V
Gamadevoltajedelaseal:0...+10V
Presindiferencial:70mbar
2
tubos
de
conexin
Completodetubodeinmersin.
-
7/25/2019 ACT SPA
12/14
TECNOLOGIADELAREGULACIONAUTOMATICA
Medidordelcaudaldeturbina
DL2691
Utilizadoparamedirel
caudalsegnelprincipio
volumtrico.
CaractersticastcnicasAlimentacin:15V
Gamademedida:10...100l/h
Temperaturademedida:20C
Liquidode
medida:
agua
Vlvulasolenoide
DL2692
Vlvulade2viascon
amplificadorde
conmutacin.
CaractersticastcnicasAlimentacin:+15V
Voltajedecontrol:>1
InterruptorUnipolar
DLPSMOD
Elementoplugin,
normalmenteabierto,
cargadeconmutacin2A,
250V
Pulsadorunipolar
DLPPMOD
Elementoplugin,cargade
conmutacin2A,250V.
-
7/25/2019 ACT SPA
13/14
TECNOLOGIADELAREGULACIONAUTOMATICA
Interfazpara
PC
DL1893
Unidadde
interfaz: se
utilizaparainterconectar
lassealesdelmundoreal
aunsistemade
adquisicindedatos
Caractersticastcnicas
16entradasanalgicas:010Vcc
2salidasanalgicas:010Vcc
8entradasTTL
8salidasderel
Alimentacin:220V,5060Hz
Entrada/Salida:terminalesde2mm.
ConexinUSB
Software
DL
ACTSW
Estesoftwareproporciona
lasherramientaspara
generarlassealesde
controlparalosmdulosy
paraadquiriryvisualizar
lassealesylasformasde
ondaquesedeben
analizar.
CaractersticastcnicasVentanadecontroldeentrada/salida.
Ventana generador de seales (continua, onda
cuadrada,rampa,triangular,sinusoidal,pulso).
Ventanadeosciloscopiode3 trazasen funcionamiento
continuo,soloydecontroldeactivacin.
Ventanadelregistradorgrficode4canales.
Ventanaconeldiagramadelsistemaenevaluacincon
controles de E/S para el ajuste y la visualizacin de las
seales.
Cablesdeconexin
DL1155ACT
Conjuntodecablesparala
conexindelosterminales
delosmdulos.
Bastidor
DL21003M
Estructurametlicaparaelmontajedelosmdulosdel
laboratorio.
-
7/25/2019 ACT SPA
14/14
TECNOLOGIADELAREGULACIONAUTOMATICA
DL2613
DL2614
DL2622
DL2670
DL2671
DL2672
DL2673
DL2674
DL2675
DL2676
DL2677
DL2678
DL2679
DL2680
DL2681
DL2682
DL2625
DL2684
DL2685
DL2686
DL2687
DL2688
DL2689
DL2690
DL2691
DL2692
DLPS
MOD
DLPP
MOD
OSCILLOSCOPE
DL1155ACT
DL2100
3M
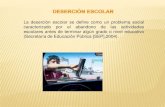
PROCESOS
TipoP 1 1 1 1 1 1TipoI 1 1 1 1 1 1TipoI 1 1 1 1 1 11orden 1 1 1 1 1 1Superioral1 1 2 1 1 1 12orden 1 1 1 1 1 1 1
CONTROLADORESControladorP 1 1 1 1 1 1ControladorI 1 1 1 1 1 1ControladorD 1 1 1 1 1 1ControladorPI 1 1 1 1 1 1 1 1ControladorPD 1 1 1 1 1 1 1 1 1 1ControladorPID 1 1 1 1 1 1 1 1 1ControladorPIDconregulacinmuestreoyoffset
1 1 1 1 1 1 1 1 1 1
REGULACINAUTOMTICACONTINUARegulacin
P,
proceso
de
tipo
P
1 1
1
1 1
1 1 1RegulacinP,proceso1ordenysuperior
1 1 1 2 1 1 1 1
RegulacinI,proceso2orden 1 1 1 1 1 1 1 1 1RegulacinP,PD,PIePID,procesodeordensuperior
1 1 1 2 1 1 1 1 1
MtodoZieglerNichols 1 1 1 2 1 1 1 1 1Mtodoesttico ChienHronesReswick
1 1 1 2 1 1 1 1 1
Configuracinparalelayserie 1 1 1 1 1 1 1 2 1 1 1 1
REGULACINAUTOMTICADISCONTINUAControladoresde2posiciones,controladoresde3gamas
1 1 1 1 2 1 1 1
Tecnicasdeadquisicindemuestreo
1 1 1 1 1 1
Controladorde2posiciones,procesode1orden
1 1 1 1 1 1 1 1
Controladorde
3gamas,
proceso
de2orden 1 1 1 1 1 2 1 1 1 1
Controladorde2posiciones,procesode2orden,feedbackatrasado
1 1 1 2 1 1 1 1 1 1
Controladorde2posiciones,procesode2orden,feedbackelstico
1 1 1 2 1 1 1 1 1
Controladordemuestreo,procesode4orden
1 1 1 2 1 1 1 1 1
CONTROLDEUNMOTORCCRegulacinP,PIePIDdevelocidadenmotorCC,mtodoCHR
1 1 1 1 1 1 1 1 1 1
Controldeungenerador 1 1 1 1 1 1 1 1 1 1 1
CONTROLDETEMPERATURAControladorde2posiciones 1 1 1 1 1 1 1 1Controladorde2posiciones,
"feedback"atrasado
1 1
1 1
1
1 1
1 1 1 1 1
Controladorde2posiciones,feedbackelstico
1 1 1 1 1 1 1 1 1 1 1
Controladorde3gamas 1 1 1 1 2 1 1 1 1 1 1RegulacinP,PIyPIDdelatemperatura,mtodoCHR
1 1 1 1 1 1 1 1 1
CONTROLDELUMINOSIDADRegulacinP,PIyPIDdelaluz,mtodoCHR
1 1 1 1 1 1 1 1 1
CONTROLDENIVELCaractersticasdelabomba 1 1 1 1 1 1 1Caractersticasdelsistemademedida
1 1 1 1 1 1 1 1
Caractersticasdelproceso 1 1 1 1 1 1 1 1ControlP 1 1 1 1 1 1 1 1 1 1 1ControlPI 1 1 1 1 1 1 1 1 1 1 1 1 1ControlPID 1 1 1 1 1 1 1 1 1 1 1
Controlde
2posiciones
1 1
1
1
1
1
1 1CONTROLDECAUDALCaractersticasdelsistemademedida
1 1 1 1 1 1 1 1 1
Anlisisdelcontroldecaudal 1 1 1 1 1 1 1 1 1 1 1