
Análisis de estructuras de barras - Matrices de Rigidez Típicas en Coordenadas Globales
12
MATRICES DE RIGIDEZ TÍPICAS EN COORDENADAS GLOBALES Barra “normal” horizontal: K g =K l = [ EA L 0 0 − EA L 0 0 0 12EI L 3 6EI L 2 0 − 12EI L 3 6EI L 2 0 6EI L 2 4EI L 0 − 6EI L 2 2EI L − EA L 0 0 EA L 0 0 0 − 12EI L 3 − 6EI L 2 0 12EI L 3 − 6EI L 2 0 6EI L 2 2EI L 0 − 6EI L 2 4EI L ] Barra “normal” Vertical: K g =T t ∗K l ∗T = [ 12EI L 3 0 − 6EI L 2 − 12EI L 3 0 − 6EI L 2 0 EA L 0 0 − EA L 0 − 6EI L 2 0 4EI L 6EI L 2 0 2EI L − 12EI L 3 0 6EI L 2 12EI L 3 0 6EI L 2 0 − EA L 0 0 EA L 0 − 6EI L 2 0 2EI L 6EI L 2 0 4EI L ]
Transcript of Análisis de estructuras de barras - Matrices de Rigidez Típicas en Coordenadas Globales
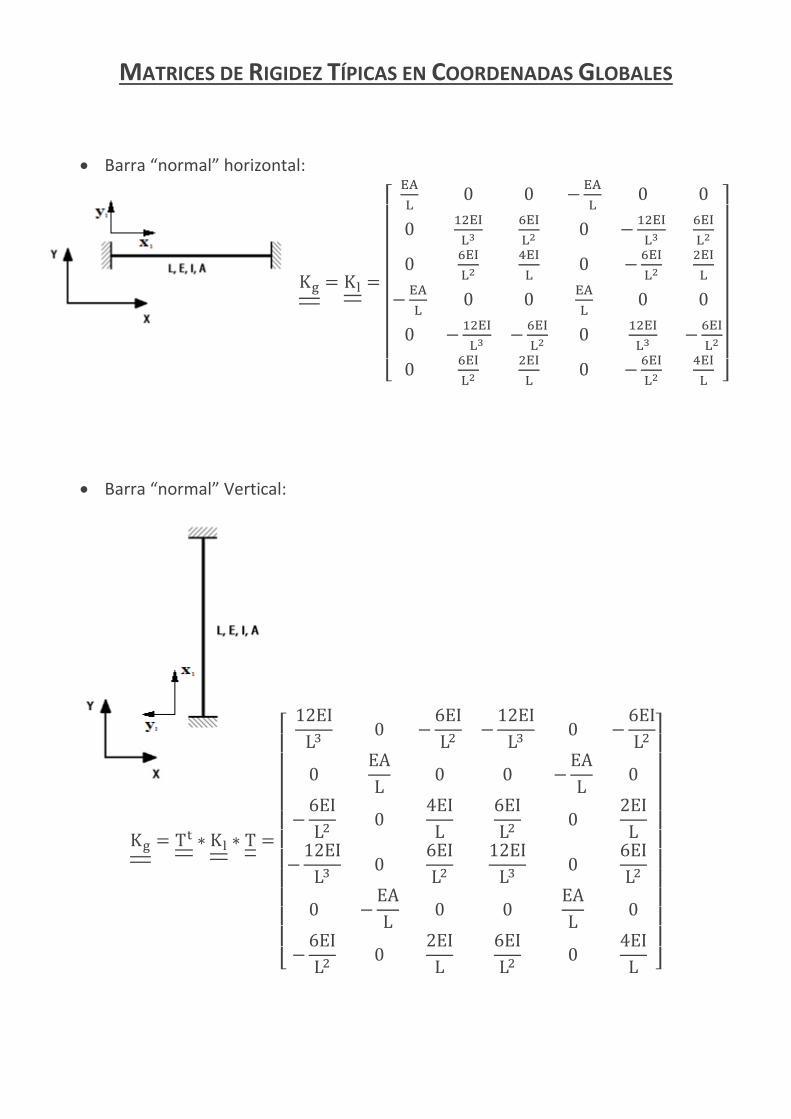
MATRICES DE RIGIDEZ TÍPICAS EN COORDENADAS GLOBALES
Barra “normal” horizontal:
Kg = Kl =
[
EA
L0 0 −
EA
L0 0
012EI
L3
6EI
L20 −
12EI
L3
6EI
L2
06EI
L2
4EI
L0 −
6EI
L2
2EI
L
−EA
L0 0
EA
L0 0
0 −12EI
L3−
6EI
L20
12EI
L3−
6EI
L2
06EI
L2
2EI
L0 −
6EI
L2
4EI
L ]
Barra “normal” Vertical:
Kg = Tt ∗ Kl ∗ T =
[
12EI
L30 −
6EI
L2−
12EI
L30 −
6EI
L2
0EA
L0 0 −
EA
L0
−6EI
L20
4EI
L
6EI
L20
2EI
L
−12EI
L30
6EI
L2
12EI
L30
6EI
L2
0 −EA
L0 0
EA
L0
−6EI
L20
2EI
L
6EI
L20
4EI
L ]
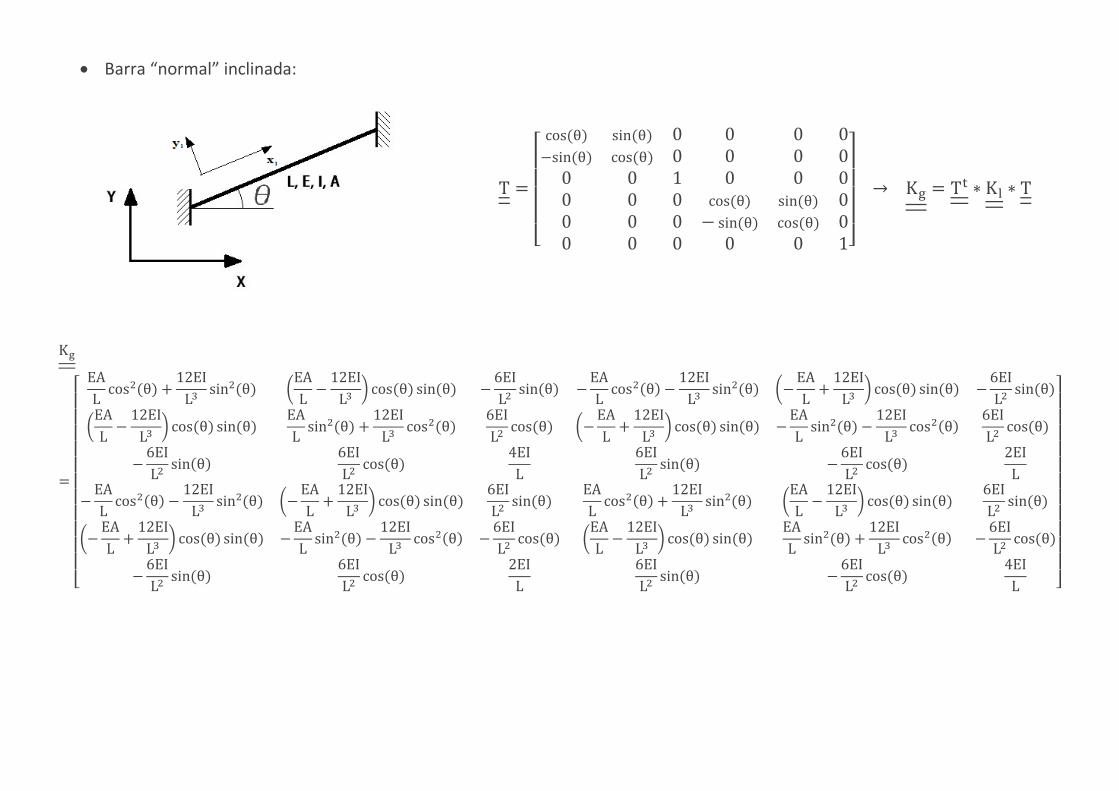
Barra “normal” inclinada:
T =
[
cos(θ) sin(θ) 0 0 0 0−sin(θ) cos(θ) 0 0 0 0
0 0 1 0 0 00 0 0 cos(θ) sin(θ) 00 0 0 − sin(θ) cos(θ) 00 0 0 0 0 1]
→ Kg = Tt ∗ Kl ∗ T
Kg
=
[
EA
Lcos2(θ) +
12EI
L3sin2(θ) (
EA
L−
12EI
L3) cos(θ) sin(θ) −
6EI
L2sin(θ) −
EA
Lcos2(θ) −
12EI
L3sin2(θ) (−
EA
L+
12EI
L3) cos(θ) sin(θ) −
6EI
L2sin(θ)
(EA
L−
12EI
L3) cos(θ) sin(θ)
EA
Lsin2(θ) +
12EI
L3cos2(θ)
6EI
L2cos(θ) (−
EA
L+
12EI
L3) cos(θ) sin(θ) −
EA
Lsin2(θ) −
12EI
L3cos2(θ)
6EI
L2cos(θ)
−6EI
L2sin(θ)
6EI
L2cos(θ)
4EI
L
6EI
L2sin(θ) −
6EI
L2cos(θ)
2EI
L
−EA
Lcos2(θ) −
12EI
L3sin2(θ) (−
EA
L+
12EI
L3) cos(θ) sin(θ)
6EI
L2sin(θ)
EA
Lcos2(θ) +
12EI
L3sin2(θ) (
EA
L−
12EI
L3) cos(θ) sin(θ)
6EI
L2sin(θ)
(−EA
L+
12EI
L3) cos(θ) sin(θ) −
EA
Lsin2(θ) −
12EI
L3cos2(θ) −
6EI
L2cos(θ) (
EA
L−
12EI
L3) cos(θ) sin(θ)
EA
Lsin2(θ) +
12EI
L3cos2(θ) −
6EI
L2cos(θ)
−6EI
L2sin(θ)
6EI
L2cos(θ)
2EI
L
6EI
L2sin(θ) −
6EI
L2cos(θ)
4EI
L ]

Presencia de Rótulas en barras
Consecuencias en el MDR de la presencia de uniones interelementales (como p. ej. rótulas) en los extremos de una barra:
o Modifica la matriz de rigidez local de la barra de la barra: Kl → Kl∗
o Las fuerzas de empotramiento (coord. locales) que se pudiesen dar en una barra uniones interelementales, también se ven modificadas debido a la presencia de dichas uniones interelementales: Femp → Femp
∗
Determinación de Kl∗ y Femp
∗
1. Partimos de la barra como si no tuviese uniones interelementales: Fl − Femp = Kl ∗ ul
2. Reordenamos la expresión anterior colocando en las posiciones inferiores los grados de libertad libres que introducen las uniones interelementales:
[FF
FL] − [
Femp_F
Femp_L] = [
KFF KFL
KLF KLL] ∗ [
uF
uL]
Nota: normalmente FL es nulo, a no ser que haya fuerzas concentradas exteriores sobre
alguna unión interelemental (aplicadas en la dirección del grado de libertad liberado). Normalmente uF es nulo, a no ser que haya desplazamientos prescritos en alguna unión
interelemental (en dirección del grado de libertad liberado).
3. Conociendo KFF, KFL, KLF, KLL, Femp_F y Femp_L podemos determinar Kl∗ y Femp
∗ :
Determinación de Kl∗: Kl
∗ = KFF − KFL ∗ KLL−1 ∗ KLF
Nota: en esta expresión la matriz resultante no sería de dimensión 6x6, sino más pequeña, por lo que es necesario orlar la matriz. Esto es introducir una columna y una fila de ceros en la posición original de cada grado de libertad liberado por las rótulas.
Determinación de Femp∗ : Femp
∗ = Femp_F − KFL ∗ KLL−1 ∗ FempL
Nota: en esta expresión el vector resultante no sería de dimensión 6, por lo que es necesario introducir ceros en las posiciones de los grados de libertad liberados por las rótulas. Si hay varias cargas que generan diferentes fuerzas de empotramiento (p. ej. una carga distribuida junto con una carga térmica), calcular las Femp
∗ de cada carga por
separado.
Los grados de libertad liberados por las rótulas se calculan con la expresión:
uL = KLL−1 ∗ ((FL − FempL
) − KLF ∗ uF)
Nota: en esta expresión FempL correspondería a la suma de todas las fuerzas de
empotramiento generadas por todas las cargas que generan fuerzas de empotramiento.
Una vez determinados Kl
∗ y Femp∗ de la barra se procede de la forma habitual.
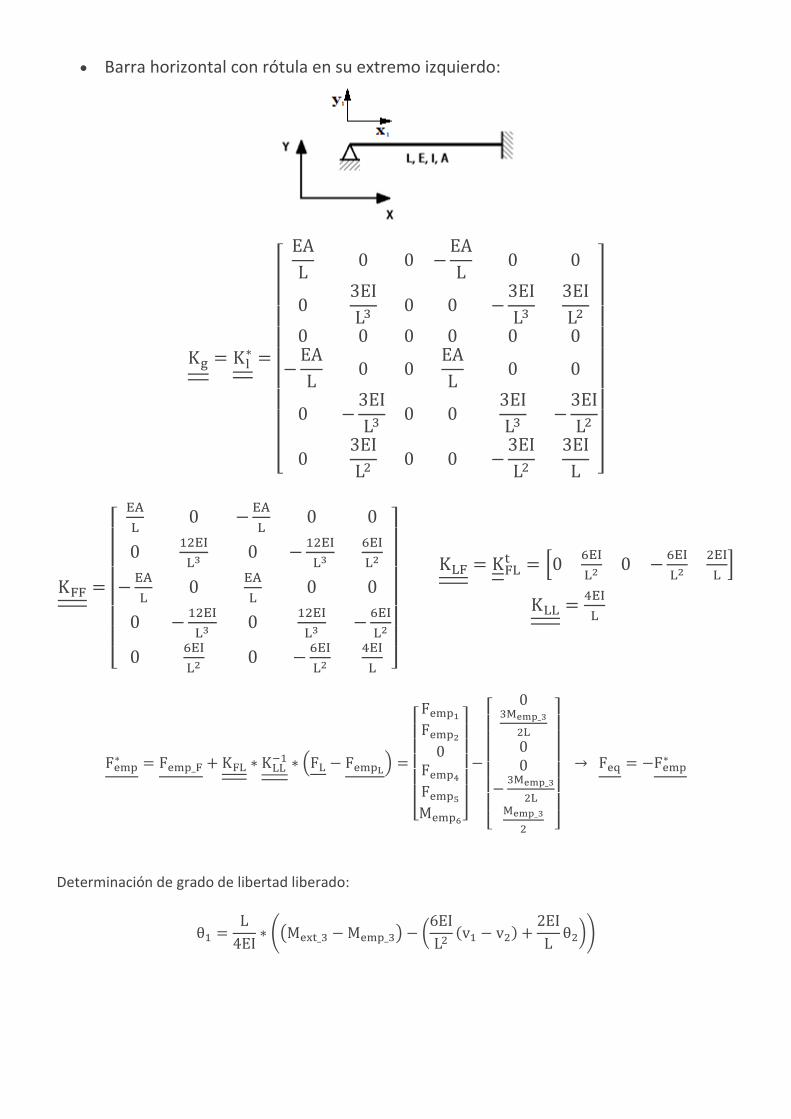
Barra horizontal con rótula en su extremo izquierdo:
Kg = Kl∗ =
[
EA
L0 0 −
EA
L0 0
03EI
L30 0 −
3EI
L3
3EI
L2
0 0 0 0 0 0
−EA
L0 0
EA
L0 0
0 −3EI
L30 0
3EI
L3−
3EI
L2
03EI
L20 0 −
3EI
L2
3EI
L ]
KFF =
[
EA
L0 −
EA
L0 0
012EI
L30 −
12EI
L3
6EI
L2
−EA
L0
EA
L0 0
0 −12EI
L30
12EI
L3−
6EI
L2
06EI
L20 −
6EI
L2
4EI
L ]
KLF = KFL
t = [06EI
L20 −
6EI
L2
2EI
L]
KLL =4EI
L
Femp∗ = Femp_F + KFL ∗ KLL
−1 ∗ (FL − FempL) =
[ Femp1
Femp2
0Femp4
Femp5
Memp6]
−
[
03Memp_3
2L
00
−3Memp_3
2LMemp_3
2 ]
→ Feq = −Femp∗
Determinación de grado de libertad liberado:
θ1 =L
4EI∗ ((Mext_3 − Memp_3) − (
6EI
L2(v1 − v2) +
2EI
Lθ2))
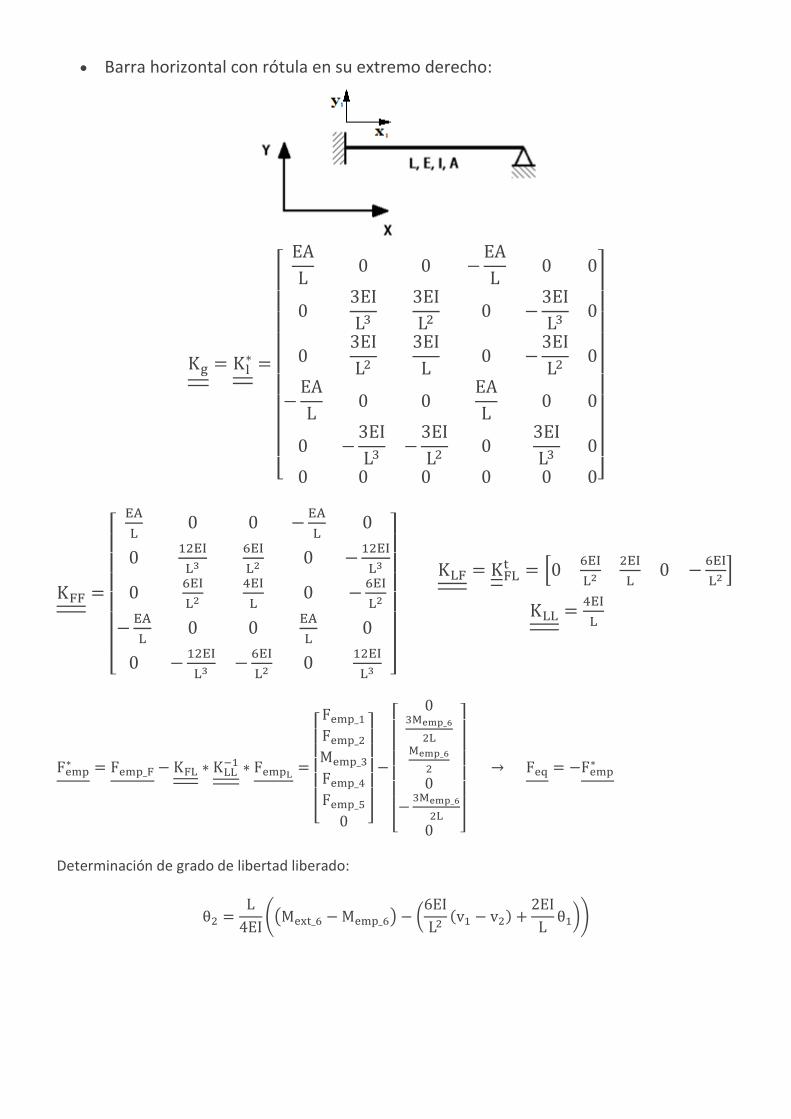
Barra horizontal con rótula en su extremo derecho:
Kg = Kl∗ =
[
EA
L0 0 −
EA
L0 0
03EI
L3
3EI
L20 −
3EI
L30
03EI
L2
3EI
L0 −
3EI
L20
−EA
L0 0
EA
L0 0
0 −3EI
L3−
3EI
L20
3EI
L30
0 0 0 0 0 0]
KFF =
[
EA
L0 0 −
EA
L0
012EI
L3
6EI
L20 −
12EI
L3
06EI
L2
4EI
L0 −
6EI
L2
−EA
L0 0
EA
L0
0 −12EI
L3−
6EI
L20
12EI
L3 ]
KLF = KFL
t = [06EI
L2
2EI
L0 −
6EI
L2]
KLL =4EI
L
Femp∗ = Femp_F − KFL ∗ KLL
−1 ∗ FempL=
[ Femp_1
Femp_2
Memp_3
Femp_4
Femp_5
0 ]
−
[
03Memp_6
2LMemp_6
2
0
−3Memp_6
2L
0 ]
→ Feq = −Femp∗
Determinación de grado de libertad liberado:
θ2 =L
4EI((Mext_6 − Memp_6) − (
6EI
L2(v1 − v2) +
2EI
Lθ1))
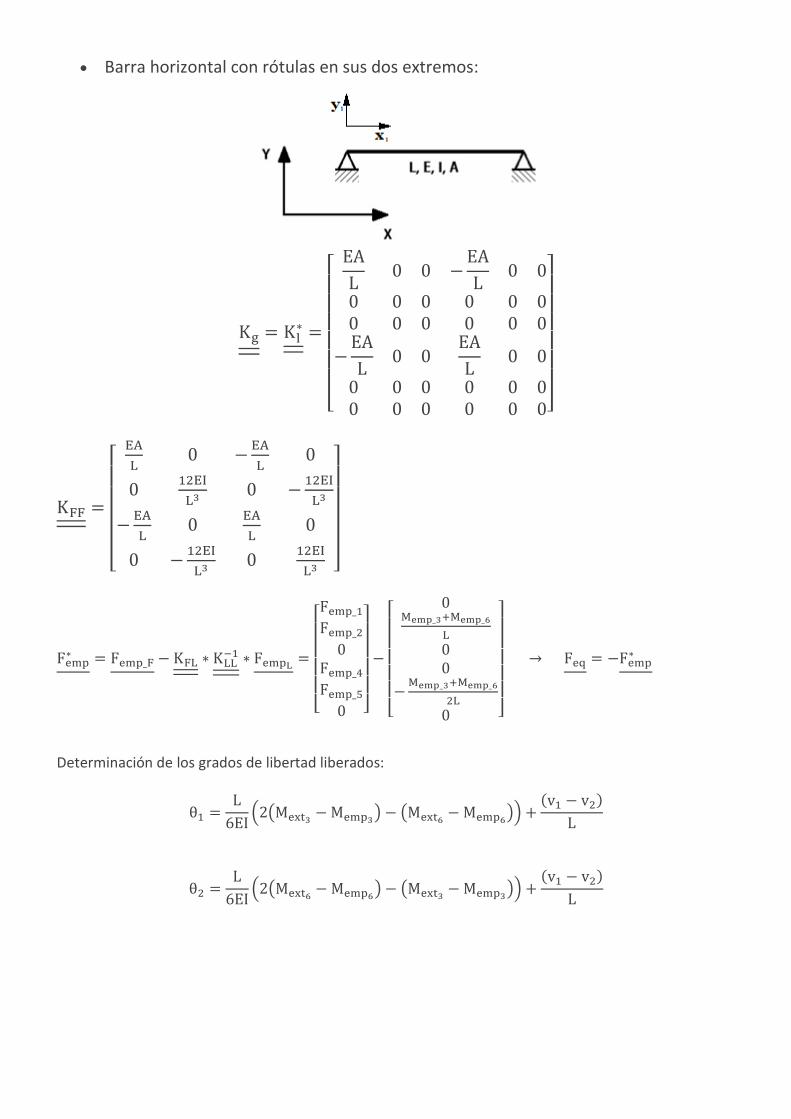
Barra horizontal con rótulas en sus dos extremos:
Kg = Kl∗ =
[
EA
L0 0 −
EA
L0 0
0 0 0 0 0 00 0 0 0 0 0
−EA
L0 0
EA
L0 0
0 0 0 0 0 00 0 0 0 0 0]
KFF =
[
EA
L0 −
EA
L0
012EI
L30 −
12EI
L3
−EA
L0
EA
L0
0 −12EI
L30
12EI
L3 ]
Femp∗ = Femp_F − KFL ∗ KLL
−1 ∗ FempL=
[ Femp_1
Femp_2
0Femp_4
Femp_5
0 ]
−
[
0Memp_3+Memp_6
L
00
−Memp_3+Memp_6
2L
0 ]
→ Feq = −Femp∗
Determinación de los grados de libertad liberados:
θ1 =L
6EI(2(Mext3 − Memp3
) − (Mext6 − Memp6)) +
(v1 − v2)
L
θ2 =L
6EI(2(Mext6 − Memp6
) − (Mext3 − Memp3)) +
(v1 − v2)
L
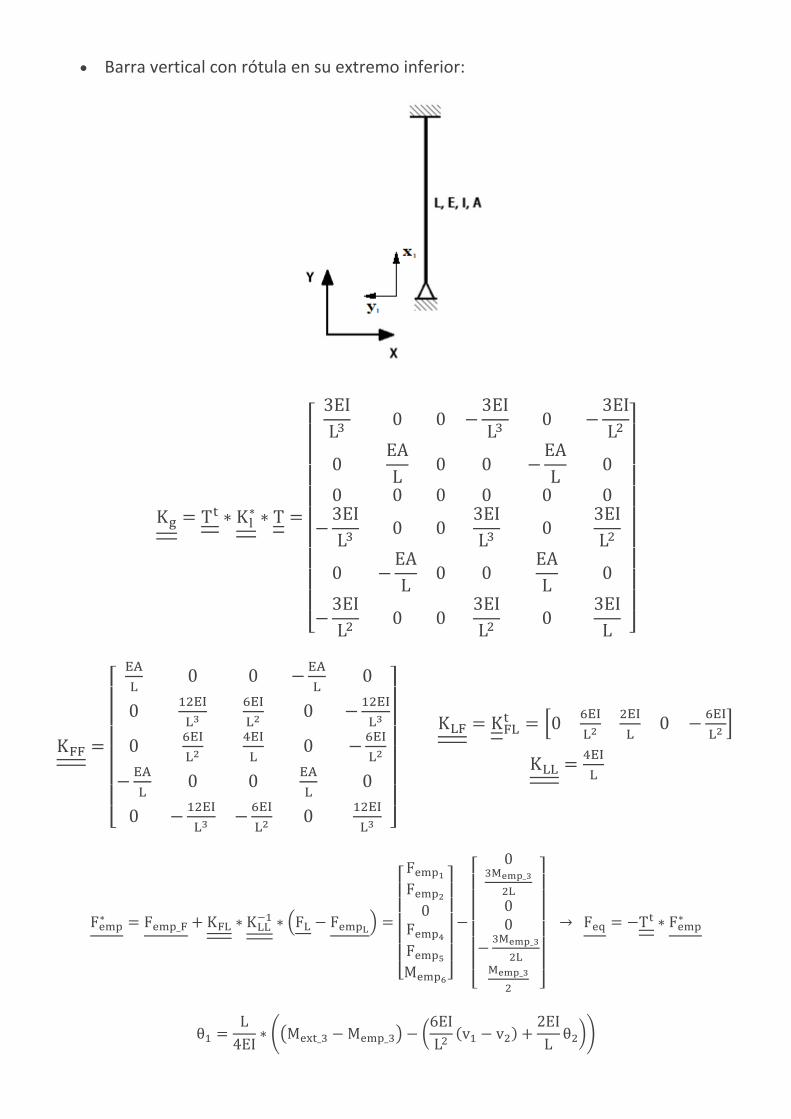
Barra vertical con rótula en su extremo inferior:
Kg = Tt ∗ Kl∗ ∗ T =
[
3EI
L30 0 −
3EI
L30 −
3EI
L2
0EA
L0 0 −
EA
L0
0 0 0 0 0 0
−3EI
L30 0
3EI
L30
3EI
L2
0 −EA
L0 0
EA
L0
−3EI
L20 0
3EI
L20
3EI
L ]
KFF =
[
EA
L0 0 −
EA
L0
012EI
L3
6EI
L20 −
12EI
L3
06EI
L2
4EI
L0 −
6EI
L2
−EA
L0 0
EA
L0
0 −12EI
L3−
6EI
L20
12EI
L3 ]
KLF = KFL
t = [06EI
L2
2EI
L0 −
6EI
L2]
KLL =4EI
L
Femp∗ = Femp_F + KFL ∗ KLL
−1 ∗ (FL − FempL) =
[ Femp1
Femp2
0Femp4
Femp5
Memp6]
−
[
03Memp_3
2L
00
−3Memp_3
2LMemp_3
2 ]
→ Feq = −Tt ∗ Femp∗
θ1 =L
4EI∗ ((Mext_3 − Memp_3) − (
6EI
L2(v1 − v2) +
2EI
Lθ2))
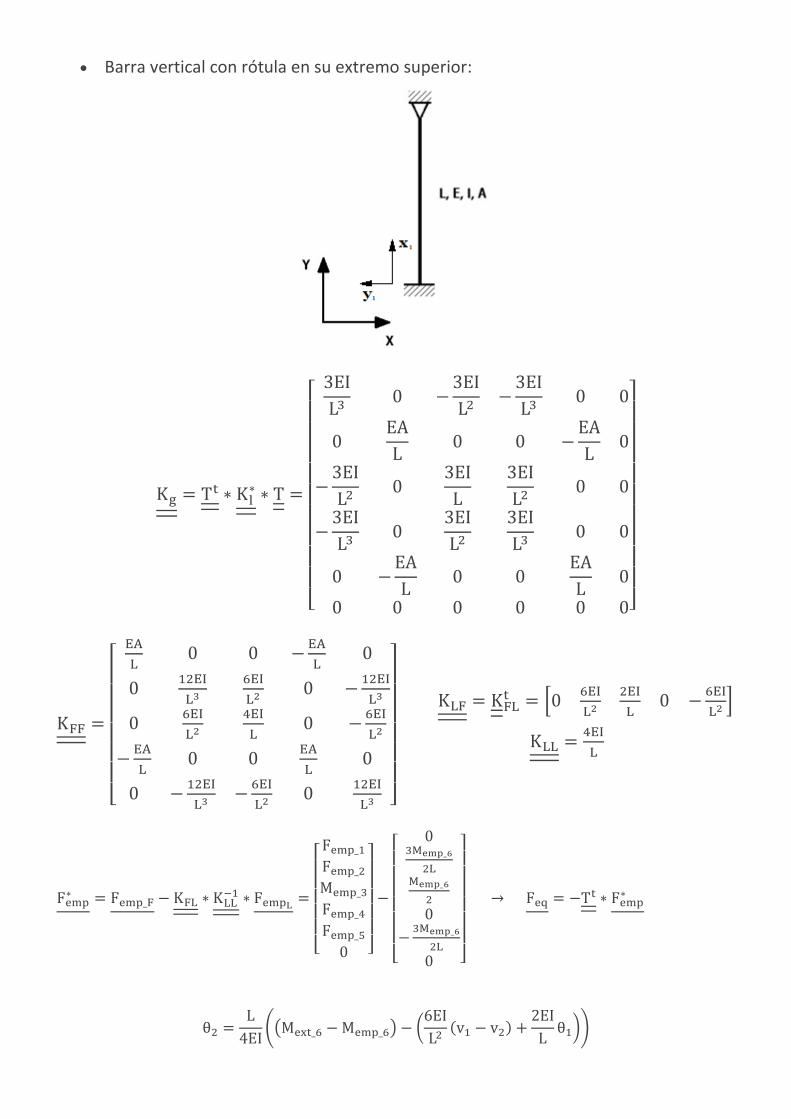
Barra vertical con rótula en su extremo superior:
Kg = Tt ∗ Kl∗ ∗ T =
[
3EI
L30 −
3EI
L2−
3EI
L30 0
0EA
L0 0 −
EA
L0
−3EI
L20
3EI
L
3EI
L20 0
−3EI
L30
3EI
L2
3EI
L30 0
0 −EA
L0 0
EA
L0
0 0 0 0 0 0]
KFF =
[
EA
L0 0 −
EA
L0
012EI
L3
6EI
L20 −
12EI
L3
06EI
L2
4EI
L0 −
6EI
L2
−EA
L0 0
EA
L0
0 −12EI
L3−
6EI
L20
12EI
L3 ]
KLF = KFL
t = [06EI
L2
2EI
L0 −
6EI
L2]
KLL =4EI
L
Femp∗ = Femp_F − KFL ∗ KLL
−1 ∗ FempL=
[ Femp_1
Femp_2
Memp_3
Femp_4
Femp_5
0 ]
−
[
03Memp_6
2LMemp_6
2
0
−3Memp_6
2L
0 ]
→ Feq = −Tt ∗ Femp∗
θ2 =L
4EI((Mext_6 − Memp_6) − (
6EI
L2(v1 − v2) +
2EI
Lθ1))
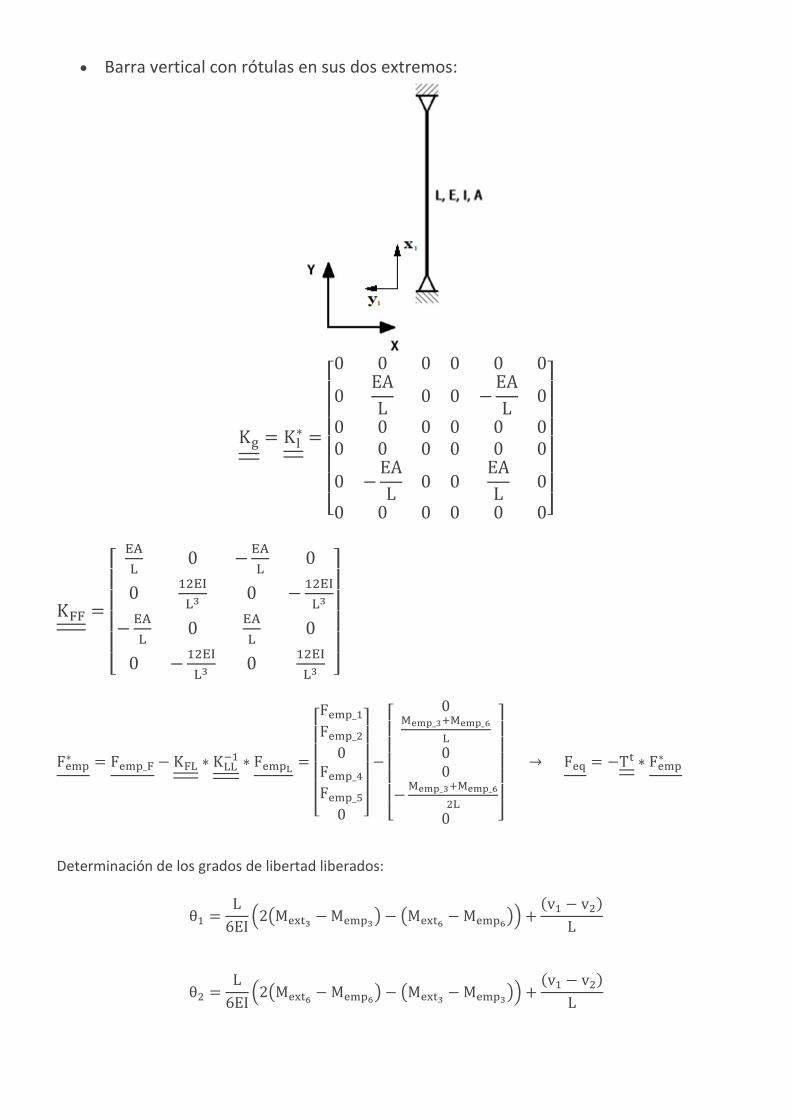
Barra vertical con rótulas en sus dos extremos:
Kg = Kl∗ =
[ 0 0 0 0 0 0
0EA
L0 0 −
EA
L0
0 0 0 0 0 00 0 0 0 0 0
0 −EA
L0 0
EA
L0
0 0 0 0 0 0]
KFF =
[
EA
L0 −
EA
L0
012EI
L30 −
12EI
L3
−EA
L0
EA
L0
0 −12EI
L30
12EI
L3 ]
Femp∗ = Femp_F − KFL ∗ KLL
−1 ∗ FempL=
[ Femp_1
Femp_2
0Femp_4
Femp_5
0 ]
−
[
0Memp_3+Memp_6
L
00
−Memp_3+Memp_6
2L
0 ]
→ Feq = −Tt ∗ Femp∗
Determinación de los grados de libertad liberados:
θ1 =L
6EI(2(Mext3 − Memp3
) − (Mext6 − Memp6)) +
(v1 − v2)
L
θ2 =L
6EI(2(Mext6 − Memp6
) − (Mext3 − Memp3)) +
(v1 − v2)
L

Barra inclinada con rótula en su extremo izquierdo:
T =
[
cos(θ) sin(θ) 0 0 0 0−sin(θ) cos(θ) 0 0 0 0
0 0 1 0 0 00 0 0 cos(θ) sin(θ) 00 0 0 − sin(θ) cos(θ) 00 0 0 0 0 1]
→ Kg = Tt ∗ Kl∗ ∗ T
Kg =
[
EA
Lcos2(θ) +
3EI
L3sin2(θ) (
EA
L−
3EI
L3) cos(θ) sin(θ) 0 −
EA
Lcos2(θ) −
3EI
L3sin2(θ) (−
EA
L+
3EI
L3) cos(θ) sin(θ) −
3EI
L2sin(θ)
(EA
L−
3EI
L3) cos(θ) sin(θ)
EA
Lsin2(θ) +
3EI
L3cos2(θ) 0 (−
EA
L+
3EI
L3) cos(θ) sin(θ) −
EA
Lsin2(θ) −
3EI
L3cos2(θ)
3EI
L2cos(θ)
0 0 0 0 0 0
−EA
Lcos2(θ) −
3EI
L3sin2(θ) (−
EA
L+
3EI
L3) cos(θ) sin(θ) 0
EA
Lcos2(θ) +
3EI
L3sin2(θ) (
EA
L−
3EI
L3) cos(θ) sin(θ)
3EI
L2sin(θ)
(−EA
L+
3EI
L3) cos(θ) sin(θ) −
EA
Lsin2(θ) −
3EI
L3cos2(θ) 0 (
EA
L−
3EI
L3) cos(θ) sin(θ)
EA
Lsin2(θ) +
3EI
L3cos2(θ) −
3EI
L2cos(θ)
−3EI
L2sin(θ)
3EI
L2cos(θ) 0
3EI
L2sin(θ) −
3EI
L2cos(θ)
3EI
L ]
Femp∗ = Femp_F − KFL ∗ KLL
−1 ∗ FempL=
[ Femp_1
Femp_2
Memp_3
Femp_4
Femp_5
0 ]
−
[
03Memp_6
2LMemp_6
2
0
−3Memp_6
2L
0 ]
→ Feq = −Tt ∗ Femp∗
θ1 =L
4EI∗ ((Mext_3 − Memp_3) − (
6EI
L2(v1 − v2) +
2EI
Lθ2))
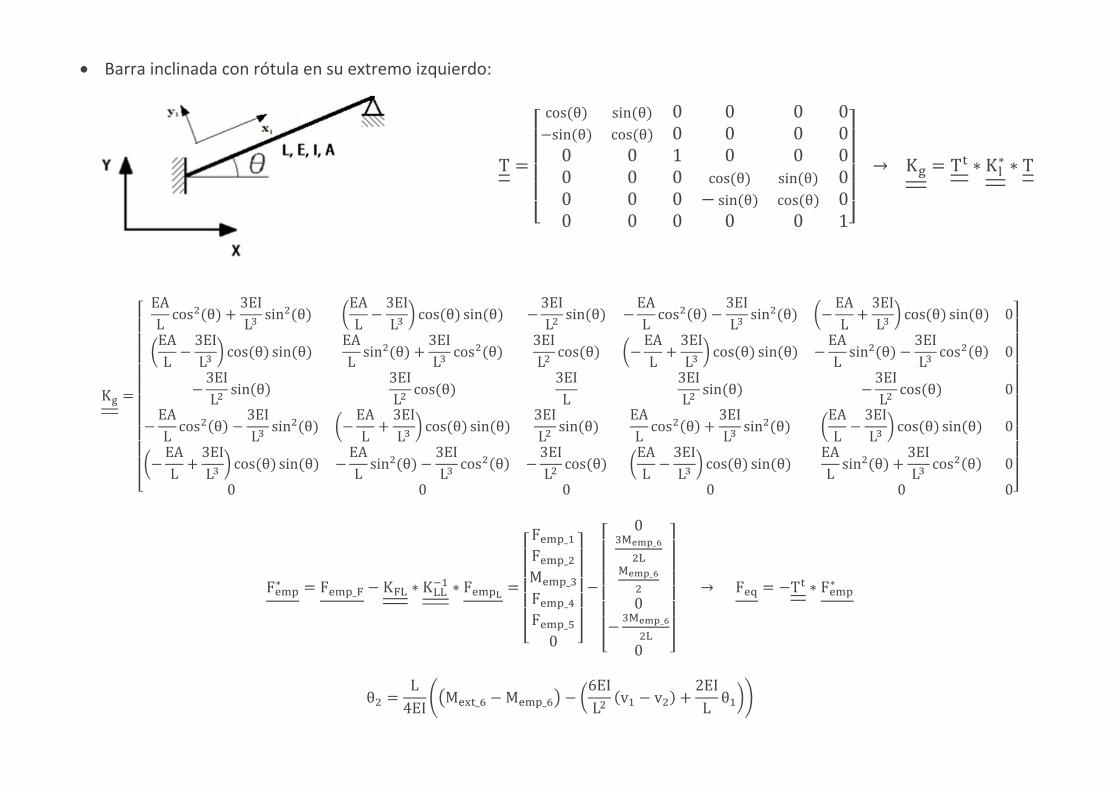
Barra inclinada con rótula en su extremo izquierdo:
T =
[
cos(θ) sin(θ) 0 0 0 0−sin(θ) cos(θ) 0 0 0 0
0 0 1 0 0 00 0 0 cos(θ) sin(θ) 00 0 0 − sin(θ) cos(θ) 00 0 0 0 0 1]
→ Kg = Tt ∗ Kl∗ ∗ T
Kg =
[
EA
Lcos2(θ) +
3EI
L3sin2(θ) (
EA
L−
3EI
L3) cos(θ) sin(θ) −
3EI
L2sin(θ) −
EA
Lcos2(θ) −
3EI
L3sin2(θ) (−
EA
L+
3EI
L3) cos(θ) sin(θ) 0
(EA
L−
3EI
L3) cos(θ) sin(θ)
EA
Lsin2(θ) +
3EI
L3cos2(θ)
3EI
L2cos(θ) (−
EA
L+
3EI
L3) cos(θ) sin(θ) −
EA
Lsin2(θ) −
3EI
L3cos2(θ) 0
−3EI
L2sin(θ)
3EI
L2cos(θ)
3EI
L
3EI
L2sin(θ) −
3EI
L2cos(θ) 0
−EA
Lcos2(θ) −
3EI
L3sin2(θ) (−
EA
L+
3EI
L3) cos(θ) sin(θ)
3EI
L2sin(θ)
EA
Lcos2(θ) +
3EI
L3sin2(θ) (
EA
L−
3EI
L3) cos(θ) sin(θ) 0
(−EA
L+
3EI
L3) cos(θ) sin(θ) −
EA
Lsin2(θ) −
3EI
L3cos2(θ) −
3EI
L2cos(θ) (
EA
L−
3EI
L3) cos(θ) sin(θ)
EA
Lsin2(θ) +
3EI
L3cos2(θ) 0
0 0 0 0 0 0]
Femp∗ = Femp_F − KFL ∗ KLL
−1 ∗ FempL=
[ Femp_1
Femp_2
Memp_3
Femp_4
Femp_5
0 ]
−
[
03Memp_6
2LMemp_6
2
0
−3Memp_6
2L
0 ]
→ Feq = −Tt ∗ Femp∗
θ2 =L
4EI((Mext_6 − Memp_6) − (
6EI
L2(v1 − v2) +
2EI
Lθ1))
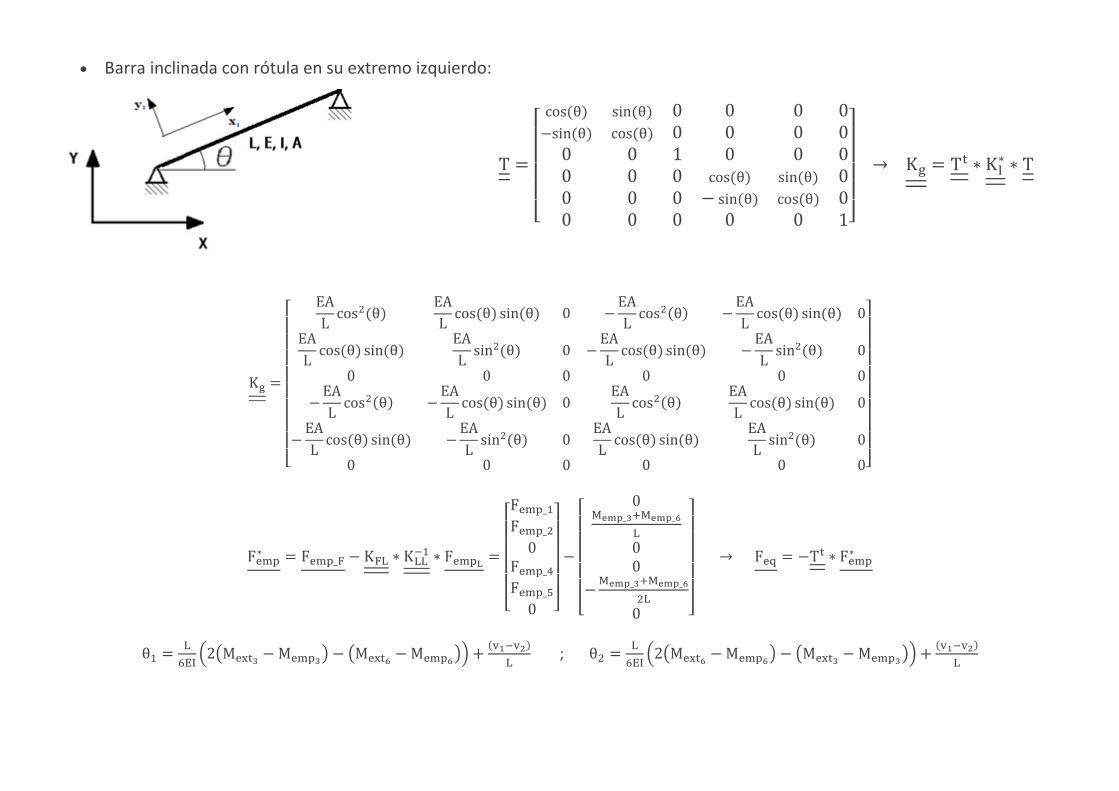
Barra inclinada con rótula en su extremo izquierdo:
T =
[
cos(θ) sin(θ) 0 0 0 0−sin(θ) cos(θ) 0 0 0 0
0 0 1 0 0 00 0 0 cos(θ) sin(θ) 00 0 0 − sin(θ) cos(θ) 00 0 0 0 0 1]
→ Kg = Tt ∗ Kl∗ ∗ T
Kg =
[
EA
Lcos2(θ)
EA
Lcos(θ) sin(θ) 0 −
EA
Lcos2(θ) −
EA
Lcos(θ) sin(θ) 0
EA
Lcos(θ) sin(θ)
EA
Lsin2(θ) 0 −
EA
Lcos(θ) sin(θ) −
EA
Lsin2(θ) 0
0 0 0 0 0 0
−EA
Lcos2(θ) −
EA
Lcos(θ) sin(θ) 0
EA
Lcos2(θ)
EA
Lcos(θ) sin(θ) 0
−EA
Lcos(θ) sin(θ) −
EA
Lsin2(θ) 0
EA
Lcos(θ) sin(θ)
EA
Lsin2(θ) 0
0 0 0 0 0 0]
Femp∗ = Femp_F − KFL ∗ KLL
−1 ∗ FempL=
[ Femp_1
Femp_2
0Femp_4
Femp_5
0 ]
−
[
0Memp_3+Memp_6
L
00
−Memp_3+Memp_6
2L
0 ]
→ Feq = −Tt ∗ Femp∗
θ1 =L
6EI(2(Mext3 − Memp3
) − (Mext6 − Memp6)) +
(v1−v2)
L ; θ2 =
L
6EI(2(Mext6 − Memp6
) − (Mext3 − Memp3)) +
(v1−v2)
L


















