Análisis Numérico para Ingeniería - fi.mdp.edu.ar · Factorización de Doolittle ... de la...
45
Análisis Numérico para Ingeniería Clase Nro. 5
-
Upload
trinhxuyen -
Category
Documents
-
view
217 -
download
0
Transcript of Análisis Numérico para Ingeniería - fi.mdp.edu.ar · Factorización de Doolittle ... de la...

Análisis Numérico para Ingeniería
Clase Nro. 5

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 2
Sistemas de Ecuaciones Lineales
Tipos de Matrices
Método de Triangulación de Gauss
Método de Diagonalización de Gauss-Jordan
Tácticas de Pivoteo
Inversión de una Matriz
Refinamiento Iterativo de la Solución
Método de Thomas
Reducción de Crout
Temas a tratar:

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 3
Tipos de Matrices
Matriz Densa
Matriz Rala
Matriz Triangular Inferior
Matriz Triangular Superior
Matriz Diagonal
Matriz Tri-Diagonal
Matriz de Banda

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 4
Matrices Densas
Las matrices densas tienen pocos elementos nulos.

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 5
Matrices poco densas (Ralas)
En las matrices ralas o poco densas, la mayoría de sus valores son nulos.
Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 6
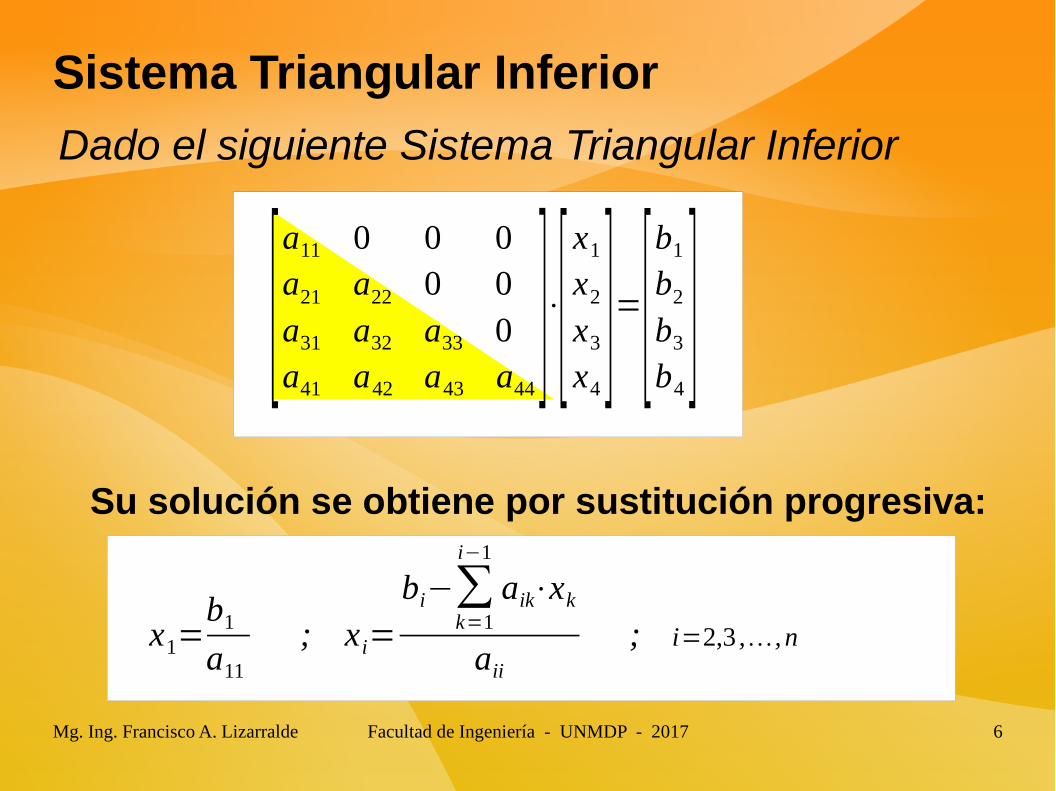
Sistema Triangular Inferior
[a11 0 0 0a21 a22 0 0a31 a32 a33 0a41 a42 a43 a44
]⋅[x1
x2
x3
x4]=[
b1
b2
b3
b4]
x1=b1
a11
; xi=
bi−∑k=1
i−1
aik⋅xk
aii
; i=2,3 ,, n
Su solución se obtiene por sustitución progresiva:
Dado el siguiente Sistema Triangular Inferior
Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 7
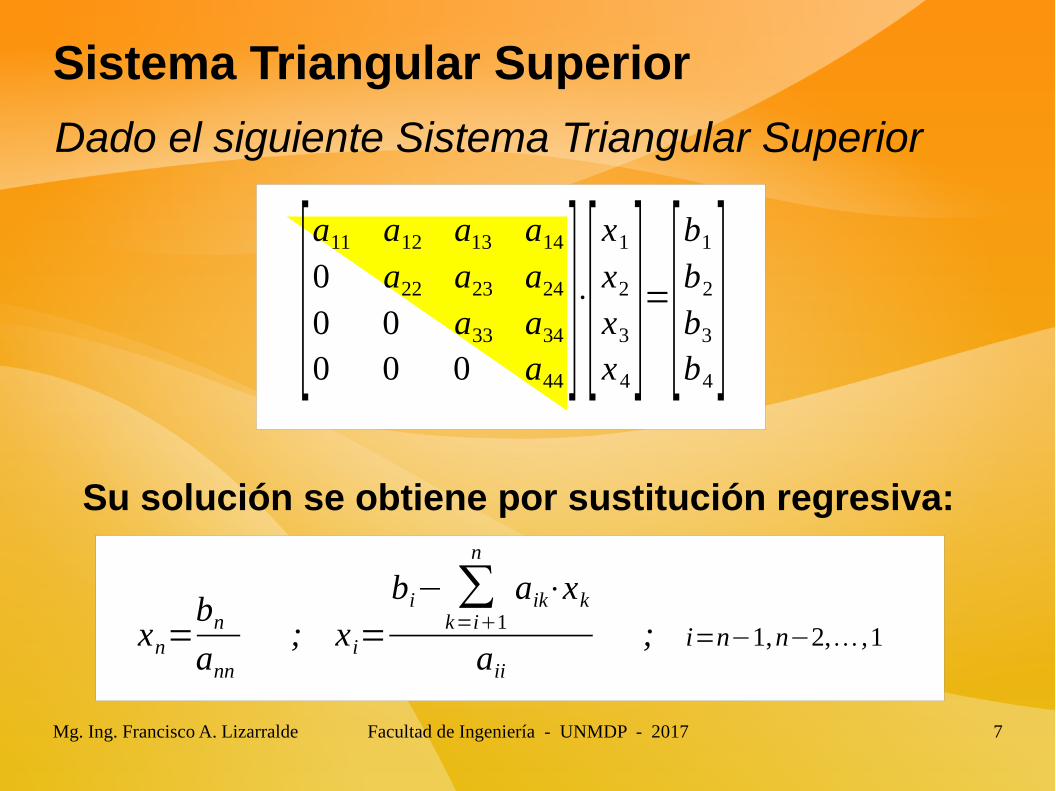
Sistema Triangular Superior
[a11 a12 a13 a14
0 a22 a23 a24
0 0 a33 a34
0 0 0 a44]⋅[
x1
x2
x3
x4]=[
b1
b2
b3
b4]
xn=bn
ann
; xi=
bi− ∑k=i1
n
aik⋅xk
aii
; i=n−1,n−2, ,1
Su solución se obtiene por sustitución regresiva:
Dado el siguiente Sistema Triangular Superior

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 8
Sistema Diagonal
[a11 0 0 00 a22 0 00 0 a33 00 0 0 a44
]⋅[x1
x2
x3
x4]=[
b1
b2
b3
b4]
x1=b1
a11
; x2=b2
a22
; x3=b3
a33
; x4=b4
a44
Su solución se obtiene como:
Dado el siguiente Sistema Diagonal
Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 10
Ejemplo de aplicación
Las plantas con la presencia del sol convierten durante su proceso de fotosíntesis, el dióxido de carbono y el agua en glucosa y oxígeno.
Simbólicamente el proceso puede ser representado así:
Dióxido de carbono( CO2 ) + Agua( H
2O ) → Glucosa( C
6H
12O
6 ) + Oxígeno( O
2 )
Balancear la ecuación química de la reacción, determinando los valores enteros más pequeños para las variables, si denominamos:
x = la proporción dióxido de carbono presente
y = la proporción de agua presente,
w = la proporción de glucosa producida, y
z = la proporción de oxígeno producido.

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 11
Planteo del ejemplo de aplicación
De esta forma, a ecuación de la reacción química puede ser representada así:
x CO2 + y H
2O → w C
6H
12O
6 + z O
2
El número de átomos presente en un elemento químico está indicado mediante un subíndice. Por lo tanto, comparando la cantidad de átomos de cada elemento que hay en los reactivos y los productos, obtenemos el siguiente sistema;
x = 6w Para balancear el Carbono
2x + y = 6w + 2z Para balancear el Oxígeno
2y = 12w Para balancear el Hidrógeno
Por lo tanto, reordenando obtenemos el siguiente sistema de ecuaciones.
x - 6w = 0
2x + y - 6w - 2z = 0
2y - 12 w = 0

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 12
Notación explícita
a11 x1a12 x2a13 x3a1n xn=b1
a21 x1a22 x2a23 x3a2n xn=b2
a31 x1a32 x2a33 x3a3n xn=b3
an1 x1an2 x2an3 x3ann xn=bn
Notación explícita para un Sistema de Ecuaciones Lineales de la forma: Ax=b

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 13
Notación Matricial
[a11 a12 a13 a1n
a21 a22 a23 a2n
a31 a32 a33 a3n
⋮ ⋮ ⋮ ⋱ ⋮an1 an2 an3 ann
]⋅[x1
x2
x3
⋮xn
]=[b1
b2
b3
⋮bn
]
Notación matricial para un Sistema de Ecuaciones Lineales de la forma: Ax=b
Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 14
Métodos Directos
Métodos de Resolución
Triangulación de Gauss
Diagonalización de Gauss-Jordan
Método de Thomas
Métodos de Factorización
Factorización de Crout
Factorización de Doolittle
Factorización de Choleski

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 16
Matriz Ampliada
a11 a12 a13 a1n
a21 a22 a23 a2n
a31 a32 a33 a3n
⋮ ⋮ ⋮ ⋱ ⋮an1 an2 an3 ann
∣b1
b2
b3
⋮bn
La matriz ampliada es una matriz que contiene los elementos de la matriz original junto con los elementos de los términos independientes, colocados como columnas adicionales.

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 17
Método de Gauss (I)
a11 a12 a13
a21 a22 a23
a31 a32 a33∣
b1
b2
b3
1 a '12 a '13
0 a '22 a '23
0 a '32 a '33∣
b '1
b '2
b '3
F '1=F1
a11
F '2=F2−F'1⋅a21
F '3=F3−F'1⋅a31
Matriz ampliada del sistema original
Tablero 1: Resultado de las operaciones sobre el sistema original

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 18
Método de Gauss (II)
1 a '12 a '13
0 a '22 a '23
0 a '32 a '33∣
b '1
b '2
b '3
Matriz ampliada correspondiente al Tablero 1
Tablero 2: Resultado de las operaciones sobre el Tablero 1
1 a '12 a '13
0 1 a ' '23
0 0 a ' '33∣
b '1b ' '2
b ' '3
→ F ' '2=F'2a '22
→ F ' '3=F'3−F ' '2⋅a '32

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 19
Método de Gauss (III)
1 a '12 a '13
0 1 a ' '23
0 0 a ' '33∣
b '1
b ' '2
b ' '3
1 a '12 a '13
0 1 a ' '23
0 0 1 ∣b '1
b ' '2
b ' ' '3→ F ' ' '3=
F' '3a ' '33
Tablero 2
Tablero 3: Resultado de las operaciones sobre el Tablero 2

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 23
Método de Gauss-Jordan (I)
a11 a12 a13
a21 a22 a23
a31 a32 a33∣
b1
b2
b3
1 a '12 a '13
0 a '22 a '23
0 a '32 a '33|
b '1
b '2
b '3
→ F '1=F1
a11
→ F '2=F2−F '1⋅a21
→ F '3=F3−F '1⋅a31
Matriz ampliada del sistema original
Tablero 1: Resultado de las operaciones sobre el sistema original

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 24
Método de Gauss-Jordan (II)
1 a '12 a '13
0 a '22 a '23
0 a '32 a '33∣
b '1
b '2
b '3
Matriz ampliada correspondiente al Tablero 1
Tablero 2: Resultado de las operaciones sobre el Tablero 1
1 0 a ' '13
0 1 a ' '23
0 0 a ' '33∣
b ' '1
b ' '2
b ' '3
→ F ' '1=F '1−F' '2⋅a '12
→ F ' '2=F '2a '22
→ F ' '3=F'3−F' '2⋅a '32

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 25
Método de Gauss-Jordan (III)
1 0 a ' '13
0 1 a ' '23
0 0 a ' '33∣
b ' '1
b ' '2
b ' '3
1 0 00 1 00 0 1 ∣
b' ' '1b' ' '2
b' ' '3
F' ' '1=F ' '1−F ' ' '3⋅a' '13
F' ' '2=F' '2−F ' ' '3⋅a' '23
F' ' '3=F ' '3a ' '33
Tablero 2
Tablero 3: Resultado de las operaciones sobre el Tablero 2

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 28
Resolución Simultánea de Sistemas
a11 a12 a13 … a1n
a21 a22 a23 … a2n
a31 a32 a33 … a3n
⋮ ⋮ ⋮ ⋱ ⋮an1 an2 an3 … ann
∣b1 c1 d1 … w1
b2 c2 d2 … w2
b3 c3 d3 … w3
⋮ ⋮ ⋮ ⋱ ⋮bn cn dn … wn
Es posible utilizar los métodos antes mencionados, para resolver n sistemas simultáneamente. Lo único que hay que hacer es agregar a la matriz ampliada los n vectores de términos independientes.

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 29
Tácticas de pivoteo
Las tácticas de pivoteo se emplean para evitar la amplificación de los errores producidos por trabajar con aritmética finita.
Por lo tanto se busca que los elementos de mayor valor absoluto, se encuentren en los pivotes.
Las estrategias de pivoteo más utilizadas son el pivoteo parcial por filas, o por columnas y el pivoteo total.

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 30
a11 a12 a13 … a1n
a21 a22 a23 … a2n
a31 a32 a33 … a3n
⋮ ⋮ ⋮ ⋱ ⋮an1 an2 an3 … ann
∣100⋮0
La solución del sistema A.x = v1, donde v
1 es el 1er. Versor,
x=A−1⋅v1equivale a :
Es decir, dicha solución es la primer columna de la inversa de la matriz A
Inversión de una Matriz

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 31
a11 a12 a13 … a1n
a21 a22 a23 … a2n
a31 a32 a33 … a3n
⋮ ⋮ ⋮ ⋱ ⋮an1 an2 an3 … ann
∣010⋮0
La solución del sistema A.x = v2, donde v
2 es el 2do. Versor,
x=A−1⋅v2equivale a :
Es decir, dicha solución es la segunda columna de la inversa de la matriz A
Inversión de una Matriz

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 32
Inversión de una Matriz
a11 a12 a13 a1n
a21 a22 a23 a2n
a31 a32 a33 a3n
⋮ ⋮ ⋮ ⋱ ⋮an1 an2 an3 ann
∣1 0 0 00 1 0 00 0 1 0⋮ ⋮ ⋮ ⋱ ⋮0 0 0 1
Para hallar la inversa de una matriz por medio del método de Gauss-Jordan. Simplemente se ingresan tantos versores como sea el orden de la matriz y se aplica el método a todos los sistemas simultáneamente. Como la solución de cada sistema corresponde a cada una de las columnas de la matriz inversa, al finalizar el proceso de diagonalización, se obtendrá la matriz inversa completa.

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 33
Inversión de una Matriz
SUBROUTINE Inversa(matriz)! Calcula la inversa de una matriz, por Gauss-JordanREAL(8), DIMENSION(:,:), INTENT(IN) :: matrizREAL(8), ALLOCATABLE, DIMENSION(:,:) :: matrizIdentidadINTEGER orden
orden = SIZE(matriz, DIM=1)
CALL creaMatrizIdentidad(orden, matrizIdentidad) CALL GaussJordan(matriz, matrizIdentidad) DEALLOCATE(matrizIdentidad) END SUBROUTINE
Implementación con Gauss-Jordan

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 34
Refinamiento Iterativo (I)
La solución exacta de un sistema de ecuaciones lineales es:
A⋅x−b=0
A⋅x*−b=r≠0
A⋅x*−b=r
-A⋅x−b=0
----------------
A⋅(x*−x)=r ⇒ A⋅(Δ x)=r
Como solo podemos calcular una solución aproximada x* , nos queda un residuo r.
Si restamos ambas expresiones, obtenemos :

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 35
Refinamiento Iterativo (II)
Con este nuevo valor de x, podemos calcular un nuevo residuo y compararlo con una cota establecida. Si dicha cota no se ha alcanzado, se repite el proceso.
xi+1=xi−Δ xi
A⋅Δ x=r
Por lo tanto podemos hallar la solución del siguiente sistema:
Esta solución a su vez, nos permite calcular un nuevo valor xi+1
Sin embargo, como no conocemos el valor exacto, tenemos:
A⋅(x0−x1)=r0A⋅Δ x0=r0

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 36
SI
NO
|| r || > ε
HACER x* = x* - Δx
CALCULAR Δx resolviendo A.Δx = r
CALCULAR r comor = Ax* - b
CALCULAR x* resolviendo A.x* = b
Refinamiento Iterativo (III)

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 38
Método de Thomas
El método de Thomas es una optimización del método de Gauss, para resolver sistemas cuyas matrices son tri-diagonales.
[d1 u1 0 0 0l1 d2 u2 0 00 l2 d3 u3 00 0 l3 d4 0⋮ ⋮ ⋮ ⋮ ⋱ ⋮0 0 0 dn−1 un−1
0 0 0 ln−1 dn
]⋅[x1
x2
x3
x4
⋮xn−1
xn
]=[b1
b2
b3
b4
⋮bn−1
bn
]

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 39
u = . . . 0u(1) u(2) u(3) u(4) . . . u(n)
d = . . .d(1) d(2) d(3) d(4) . . . d(n)
l = 0 . . .l(1) l(2) l(3) l(4) . . . l(n)
u1
u2
u3
u4
d1
d2
d3
d4
dn
l1
l2
l3
ln-1
Diagonal Superior
Diagonal Principal
Para trabajar con vectores del mismo tamaño, a los vectores que almacenan los valores de las diagonales secundarias, se los completa con un 0, según corresponda. Esto simplifica enormemente el algoritmo.
Diagonal Inferior
Variables en el método de Thomas
Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 40
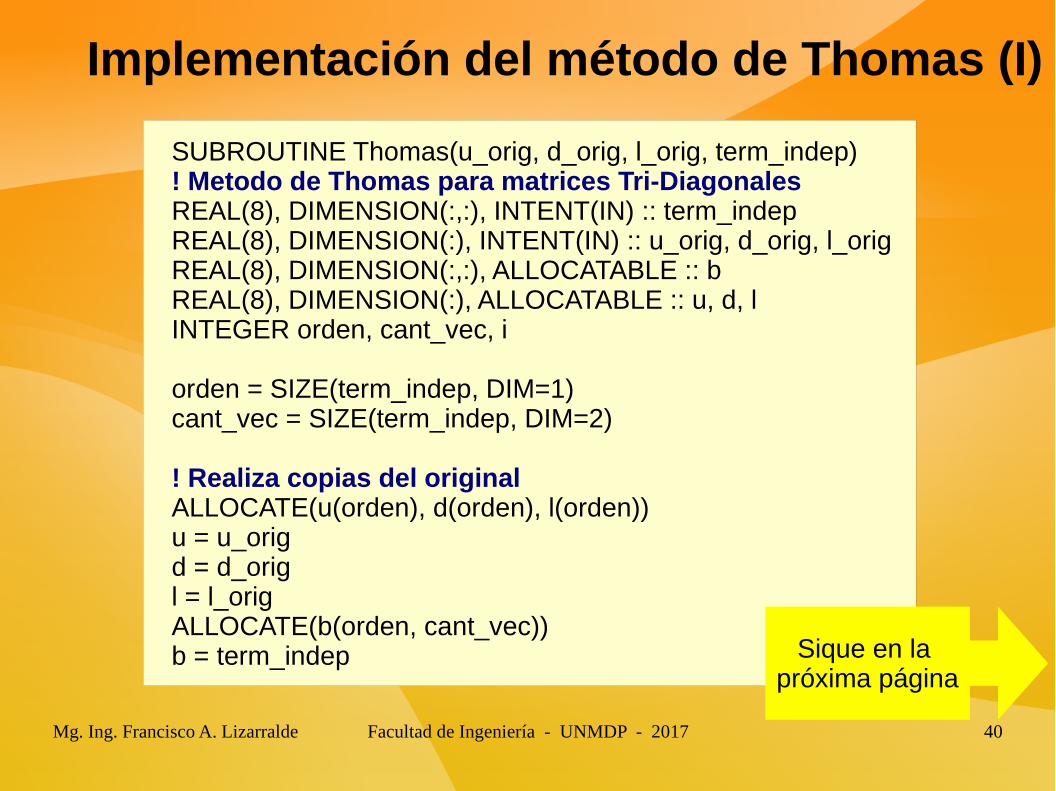
SUBROUTINE Thomas(u_orig, d_orig, l_orig, term_indep)! Metodo de Thomas para matrices Tri-DiagonalesREAL(8), DIMENSION(:,:), INTENT(IN) :: term_indepREAL(8), DIMENSION(:), INTENT(IN) :: u_orig, d_orig, l_origREAL(8), DIMENSION(:,:), ALLOCATABLE :: bREAL(8), DIMENSION(:), ALLOCATABLE :: u, d, l INTEGER orden, cant_vec, i orden = SIZE(term_indep, DIM=1)cant_vec = SIZE(term_indep, DIM=2)
! Realiza copias del originalALLOCATE(u(orden), d(orden), l(orden))u = u_origd = d_origl = l_origALLOCATE(b(orden, cant_vec))b = term_indep Sique en la
próxima página
Implementación del método de Thomas (I)

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 41
! Aqui comienza el algoritmoDO i=1, orden-1 u(i) = u(i) / d(i) b(i,:) = b(i,:) / d(i) d(i) = 1.0 d(i+1) = d(i+1) - l(i+1)*u(i) b(i+1,:) = b(i+1,:) - l(i+1)*b(i,:) l(i+1) = 0.0ENDDO
! Obtencion de la solucion por Sustitucion Inversa b(orden,:) = b(orden,:)/d(orden) DO i=orden-1, 1, -1 b(i,:) = b(i,:) - u(i)*b(i+1,:) / d(i) END DO
CALL imprimeMatriz(b) DEALLOCATE(u, d, l, b)END SUBROUTINE
Implementación del método de Thomas (II)

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 42
La factorización LU (o factorización triangular) de una matriz A, consiste en reescribir dicha matriz, como producto de dos matrices triangulares L y U. Donde la matriz L es triangular inferior y la matriz U es triangular superior.
Los métodos de factorización triangular más conocidos son:
La Reducción de Crout ( LU1 )
El método de Doolittle ( L1U )
Método de Choleski para matrices A positivas definidas.
Las matrices L1 y U
1 son matrices triangulares que poseen
valores unitarios en la diagonal.
Métodos de Factorización Triangular

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 43
Métodos de Factorización
Factorización de CroutSe especifica u
11= u
22= u
33= … = 1
Factorización de DoolittleSe especifica l
11= l
22= l
33= … = 1
Factorización de CholeskiSe especifica l
ii= u
ii
No los veremos en el presente curso

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 45
Factorización de Crout (LU1)
[l11 0 0 0l21 l22 0 0l31 l32 l33 0l41 l42 l43 l44
]⋅[1 u12 u13 u14
0 1 u23 u24
0 0 1 u34
0 0 0 1]=[
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44]
Si multiplicamos las filas de L por la 1er. columna de U1 podemos
observar que los elementos de la 1er. columna de L son iguales a los elementos de la 1er. columna de A.
l11=a11 ; l21=a21 ; l31=a31 ; l41=a41
Elementosa calcular

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 46
Factorización de Crout (LU1) (I)
[l11 0 0 0l21 l22 0 0l31 l32 l33 0l41 l42 l43 l44
]⋅[1 u12 u13 u14
0 1 u23 u24
0 0 1 u34
0 0 0 1]=[
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44]
Si multiplicamos la primera fila de L por las columnas de U1 obtenemos:
l11=a11 ; l11⋅u12=a12 ; l11⋅u13=a13 ; l11⋅u14=a14
Por lo tanto podemos calcular los valores de la primera fila de U1 como:
u12=a12
l11
; u13=a13
l11
; u14=a14
l11
Elementosa calcular

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 47
Factorización de Crout (LU1) (II)
[l11 0 0 0l21 l22 0 0l31 l32 l33 0l41 l42 l43 l44
]⋅[1 u12 u13 u14
0 1 u23 u24
0 0 1 u34
0 0 0 1]=[
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44]
Si multiplicamos las filas desde 2 hasta n, de L por las 2da. columna de U1 obtenemos:
l21⋅u12l22=a22 ; l31⋅u12l32=a32 ; l41⋅u12l42=a42
Por lo tanto podemos calcular los valores de la segunda columna de L1 como:
l22=a22−l21⋅u12 ; l32=a32−l31⋅u12 ; l42=a42−l41⋅u12
Elementosa calcular

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 48
[l11 0 0 0l21 l22 0 0l31 l32 l33 0l41 l42 l43 l44
]⋅[1 u12 u13 u14
0 1 u23 u24
0 0 1 u34
0 0 0 1]=[
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44]
Repitiendo el mismo esquema, obtenemos:
l21⋅u13l22⋅u23=a23 ; l21⋅u14l22⋅u24=a24
Por lo tanto podemos calcular los valores de la segunda fila de U1 como:
u23=a23−l21⋅u13
l22
; u24=a24−l21⋅u14
l22
Factorización de Crout (LU1) (III)

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 49
Factorización de Crout (LU1) (IV)
[l11 0 0 0l21 l22 0 0l31 l32 l33 0l41 l42 l43 l44
]⋅[1 u12 u13 u14
0 1 u23 u24
0 0 1 u34
0 0 0 1]=[
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44]
Si multiplicamos las filas desde 3 hasta n, de L por las 3ra. columna de U1 obtenemos:
l31⋅u13l32⋅u23l33=a33 ; l41⋅u13l42⋅u23l43=a43
Por lo tanto podemos calcular los valores de la tercera columna de L1 como:
l33=a33−l31⋅u13−l32⋅u23 ; l43=a43−l41⋅u13−l42⋅u23
Elementosa calcular
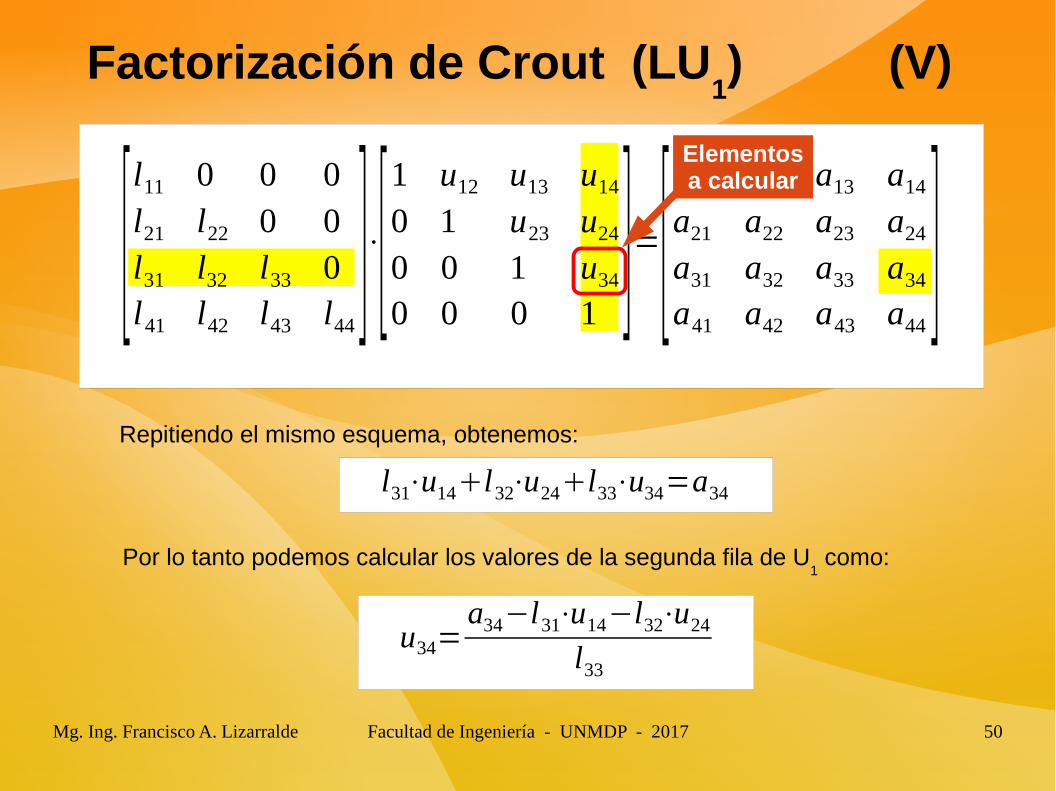
Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 50
[l11 0 0 0l21 l22 0 0l31 l32 l33 0l41 l42 l43 l44
]⋅[1 u12 u13 u14
0 1 u23 u24
0 0 1 u34
0 0 0 1]=[
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44]
Repitiendo el mismo esquema, obtenemos:
l31⋅u14l32⋅u24l33⋅u34=a34
Por lo tanto podemos calcular los valores de la segunda fila de U1 como:
u34=a34−l31⋅u14−l32⋅u24
l33
Elementosa calcular
Factorización de Crout (LU1) (V)

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 51
Factorización de Crout (LU1) (VI)
[l11 0 0 0l21 l22 0 0l31 l32 l33 0l41 l42 l43 l44
]⋅[1 u12 u13 u14
0 1 u23 u24
0 0 1 u34
0 0 0 1]=[
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44]
Si multiplicamos la filas 4, de L por las 4ta. columna de U1 obtenemos:
l41⋅u14l42⋅u24l43⋅u34l44=a44
Por lo tanto podemos calcular el último valor de L1 como:
l44=a44−l41⋅u14−l42⋅u24−l43⋅u34
Elementosa calcular

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 53
Dado que la matriz A se ha transformado en el producto L.U1
A⋅x=b L⋅U 1⋅x=b L⋅U 1⋅x=b
L⋅U 1⋅x =b L⋅c=b
Si llamamos c a (U1.x) , el sistema se transforma en:
Como la matriz L es una matriz triangular inferior, podemos obtener los valores de c, aplicando sustitución progresiva.
c1=b1
l11
; ci=
bi−∑k=1
i−1
lik⋅ck
lii; i=2,3 , , n
Solución a partir de Crout (I)

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 54
Una vez obtenidos los valores de c, como:
L⋅U 1⋅x =b L⋅c=b
Y como la matriz U1 es una matriz triangular superior, podemos
obtener los valores de x, aplicando sustitución regresiva.
U 1⋅x=c
Nos queda el siguiente sistema:
xn=cn ; xi=ci− ∑k=i1
n
uik⋅xk ; i=n−1,n−2, ,1
Solución a partir de Crout (II)

Mg. Ing. Francisco A. Lizarralde Facultad de Ingeniería - UNMDP - 2017 56
PREGUNTAS ...