analisis te perceptron con matlab, y aplicacion en tiempo real con software
19
INFORME N° 01 “EL PERCEPTRON” 1. OBJETIVOS Conocer el funcionamiento del preceptron simple Identificar los parámetros que intervinieren en este Conocer las funciones propias del MATLAB para el entrenamiento de la neuronas 2. MATERIALES o Software MATLAB o Guía de Laboratorio 3. FUNDAMENTO TEORICO 3.1. CONCEPTO Sistema capaz de realizar tareas de clasificación de forma automática. A partir de un número de ejemplos etiquetados, el sistema determina la ecuación del hiperplano discriminante 3.2. ARQUITECTURA Red monocapa con una o más neuronas de salida conectadas a todas las entradas {
description
invertigacion realizado el percempron con matlab desde un sistema implementado,en el tiemp real.y su aplicacion en tiempo real,con software
Transcript of analisis te perceptron con matlab, y aplicacion en tiempo real con software

INFORME N° 01
“EL PERCEPTRON”
1. OBJETIVOS
Conocer el funcionamiento del preceptron simple
Identificar los parámetros que intervinieren en este
Conocer las funciones propias del MATLAB para el entrenamiento de la neuronas
2. MATERIALES
o Software MATLAB
o Guía de Laboratorio
3. FUNDAMENTO TEORICO
3.1. CONCEPTO
Sistema capaz de realizar tareas de clasificación de forma automática. A partir de un número
de ejemplos etiquetados, el sistema determina la ecuación del hiperplano discriminante
3.2. ARQUITECTURA
Red monocapa con una o más neuronas de salida conectadas a todas las entradas
{

3.3. RNA de una capa
Una neurona aislada dispone de poca potencia de cálculo. Los nodos se conectan mediante la
sinapsis, las neuronas se agrupan formando una estructura llamada capa.
Los pesos pasan a ser matrices W (n x m), la salida de la red es un vector: Y=(y1, y2, ... , yn)T
Y=F(W·X+b)
3.4. RNA Multicapa
Capas en cascada se encuentra de capas: Entrada, Salida, Oculta, para esta red neuronal no
hay realimentación => red feedforward. La Salida depende de entradas y pesos. Si hay
realimentación => red recurrente
a1
a2
an
y1
y2
yn

4. DESARROLLO
El programa que se desarrolló en el software es el siguiente
%EJEMPLO PERCEPTRON.CLASIFICACION MULTINEURONA.
% Se entrena 1 capa De 2-entradas con 2 neuronas con función de
activación % escalón % con la regla del perceptrón para una clasificación
adecuada % 10 vectores de entrada en 4 regiones. help per2 clf reset pausa = 1; % DEFINICIÓN DEL PROBLEMA % Definición da diez vectores de 2-elementos de entrada. P = [+0.1 +0.7 +0.8 +0.8 +1.0 +0.3 +0.0 -0.3 -0.5 -1.5;... +1.2 +1.8 +1.6 +0.6 +0.8 +0.5 +0.2 +0.8 -1.5 -1.3]; % Definición de las diez salidas deseadas de 2-elementos. T = [1 1 1 0 0 1 1 1 0 0; 0 0 0 0 0 1 1 1 1 1]; % GRÁFICA DE LOE VECTORES A ENTRENAR disp('¡Presione cuaquier tecla para ver los vectores de entrada!') pause, disp('') V = [-2 2 -2 2] ; % los valores mínimos y máximos de cada generada son. PR = [-2 2 ; -2 2];
plotpv(P,T,V); grid on; figura=gcf ; axis('equal') title('Gráfica de los vectores de entrada') xlabel('Entrada 1') ylabel ('Entrada 2') pause % INICIALIZACION DE LA ARQUITECTURA DE LA RED % Encuentra el tamaño del vector de entrada R, el tamaño de la capa S, % el tamaño del lote Q. [R,Q] = size(P); [S,Q] = size(T);%dimencion de la matriz red=newp(PR,S); %crea el perceptron %inicializacion de pesos y umbral. Z = menu('Inicíalizar Pesos y Umbral A', ... 'Condiciones Iniciales en la guia del estudiante', ... 'Valores Aleatorios'); disp('') if Z == 1 red.IW{1,1} = [-0.6926 0.6048; 0.1433 -0.9339]; red.b{1} = [ 0.0689; -0.0030]; else red.inputweights{1,1}.initFcn = 'rands'; red.biases{1}.initFcn = 'rands'; red=init(red);

end % GRÁFICA DE LA CLASIFICACIÓN INICIAL %======== = ===== = === = =, = ==:==== = = ===== = hold on linea=plotpc(red.IW{1,1},red.b{1}); %grafica la linea de clasificacio
de la neurona % ENTRENAMIENTO DE LA RED %ENTRENAMIENTO DE LOS PARÁMETROS disp_freq = 1; max_epoch = 100; %el entrenamieto puede reemplazarse por %red.Trainparam.epochs = max_epoch; %red=train(red,P,T); %W=red.IW{1,1}; %B=red.b{1};
W = red.IW{1,1}; B = red.b{1}; pesos1 = [W(1,1)]; pesos2 = [W(1,2)]; umbrales = [B]; % FASE DE PRESENTACIÓN: A = sim(red,P); e = T - A; for epoch=1 : max_epoch % FASE DE REVISIÓN: if all(e == 0), epoch = epoch - 1; break, end % FASE DE APRENDIZAJE: dW = learnp(W,P,[],[],[],[],e,[],[],[]);
dB = learnp(B,ones(1,Q),[],[],[],[],e,[],[],[]); W = W + dW; B = B + dB; red.IW{1,1}=W; red.b{1} = [B]; % FASE DE PRESENTACIÓN: A = sim(red,P); e = T-A; % PRESENTACIÓN EN PROGRESO if rem(epoch,disp_freq) == 0 pause(pausa),disp('') linea=plotpc(W,B,linea); drawnow end pesos1 = [pesos1 W(1,1)]; pesos2 = [pesos2 W(1,2)]; umbrales = [umbrales B]; end
% GRÁFICA DE CLASIFICACIÓN FINAL
figure(figura) plotpc(W,B,linea); drawnow pause clf reset % GRÁFICA DE PESOS Y UMBRALES VS. EPOCH

%======—=============.==============-=== plot(0:epoch,pesos1,'-',0:epoch,pesos2,'--',0:epoch,umbrales,':'); axis square title('Parámetros vs. Iteraciones'); xlabel('Iteraciones '); ylabel('Wl __ W2 _ _ B ...'); pause % RESUMEN DE RESULTADOS fprintf ('\nVALORES FINALES DE LA RED:\n') W; B; fprintf ('Entrenada en %.0f iteraciones.\n',epoch) fprintf('Red clasificada: '); if all (sim(red,P) == T) disp('Correctamente.') else disp ('Incorrectamente.') set(gcf, 'nextplot','replace') end
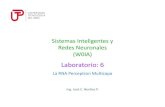
5. RESULTADOS
Los resultados que obtienen de la simulación del programa son los siguientes:

Los datos son separados linealmente mediante rectas, la cantidad de iteraciones que se
desarrolló fueron 20.
6. CONCLUSIONES
La clasificación de datos se realiza linealmente, estos dependen de los valores de
entrada
Los pesos que se ingresan al inicio son los que determinan la eficiencia de la red
Si se aumenta la cantidad de iteraciones se pueden conseguir mejores resultados
7. RECOMENDACIONES
Probar con distintos valores para comprobar la separación lineal
Modificar los pesos iniciales de la entrada y comparar con los datos obtenidos
anteriormente
Ingresar datos que no sean linealmente separables para comprobar la eficiencia de la
función

INFORME N° 02
“ADELINE”
1. OBJETIVOS
Conocer el funcionamiento de la red ADELINE
Identificar los parámetros que intervinieren en este
Conocer las funciones propias del MATLAB para el entrenamiento de la neuronas
2. MATERIALES
o Software MATLAB
o Guía de Laboratorio
3. FUNDAMENTO TEORICO
3.1. CONCEPTO
Estructura prácticamente idéntica al perceptron, pero es un mecanismo físico capaz de realizar
aprendizaje. Elemento combinador adaptativo lineal, que recibe todas las entradas, las suma
ponderadamente, y produce una salida
El perceptrón realiza tareas de clasificación salida binaria. Si las salidas fueran números reales,
estaríamos ante un problema de regresión
Aproximar una función cualquiera F(x) definida por un conjunto de datos de entrada y su
salida real correspondiente, los ejemplos de entrenamiento son conjuntos de valores: (vector
de entrada, salida real)
Habrá que buscar la función

4. DESARROLLO
El programa que se desarrolló en el software es el siguiente
%EJEMPLO ADALI1ME1: ASOCIACIÓN DE PATRONES %Parte I de la guia del estudiante Redes Neuronales %Una red, que consiste de i entradas alimentadas a una sola neurona
lineal, se entrena con la regla de aprendizaje de %Windrow-Hoff para obtener el vector deseado correcto para cada uno de
los dos vectores de entrada. La red aprende %al ajustar los pesos y umbrales %en proporción a sus efectos sobre el error de la red hasta que se %encuentra un punto de mínimo error. help adaline1 clf reset tiempopausa = 0.01; % DEFINICIÓN DEL PROBLEMA %======================== % Definición de los dos vectores de entrada de 1 elemento. P = [+1.0 -1.2]; % Definición de los dos vectores deseados de 1 elemento. T = [+0.5 +1.0]; % GRÁFICA DE MALLA DEL ERROR disp('Calculado la superficie de error, por favor
espere...'),disp('') Wrango = -1:.1:1; Brango = -1:.1:1; SE = errsurf(P,T,Wrango,Brango,'purelin'); % Calculo de la Superficie
de error disp('Presione cualquier tecla para ver la superficie de error. '),
disp (''),pause plotes(Wrango,Brango,SE); % plotea la superficie de error figura=gcf; %devuelve el valor de la cifra actual

subplot(1,2,1) title('Gráfica de la Superficie de Error') xlabel('Peso W'); ylabel('-Umbral B'); zlabel('Error Cuadrado Medio'); subplot(1,2,2) title('Gráfico de Contorno del Error') xlabel('Peso W'); ylabel('umbral B'); pause
% INICIALCIZACIÓN DE LA ARQUITECTURA DE LA RED %============================================== % Encuentra el tamaño del vector de entrada R, el tamaño de la capa S,
el tamaño del lote Q. [R,Q] = size(P); [S,Q] = size(T); %dimension de la matriz % DISEÑO DE LA RED PR=[-2 2]; %rango del elemento de entrada. ID=[0]; %Vector de Retraso de Entrada. max_razon_aprendizaje = 0.4*maxlinlr(P,'bias'); red=newlin(PR,S,ID,max_razon_aprendizaje); % Inicialización de pesos y umbral. z = menu('Inicializar Pesos y Umbral a:', ... 'Condiciones Iniciales en la guia del estudiante', ... 'Marcar Valores con el Ratón/Teclas de Desplazamiento sobre el
graf. de contorno', ... 'Valores Aleatorios'); disp(''); if z == 1 red.IW{1,1} = [-0.9309]; red.b{1} = [-0.8931]; elseif z == 3 red.inputweights{1,1}.initFcn = 'rands'; red.biases{1}.initFcn = 'rands'; red=init(red); end % GRAFICA DE CONTORNO DE ERROR, CONDICIONES INICIALES SOLUCION
DISEÑADA. figure(figura) subplot(1,2,2) axis('equal')
if z == 2 title('SELECIONE W y B AQUÍ') [red.IW{1,1},red.b{1}] = ginput(1); title('Gráfico de Contorno del Error') end % FASE.DE PRESENTACIÓN: A=sim(red,P); E=T-A; SSE=sumsqr(E); punto=plotep(red.IW{1,1},red.b{1},SSE); pause2(tiempopausa); % ENTRENAMIENTO DE LA RED % ENTRENAMIENTO DE LOS PARÁMETROS presenta_frec = 1; max_iteracion = 200; meta_error = 0.000000000000000000000000000000000000000000000000000001;

red.trainParam.goal = meta_error; LP.lr=max_razon_aprendizaje; % NOTA: El resto del código de entrenamiento puede reemplazarse
por: %[red, tr]=train(red,P,T); %iteracion = length(tr.epoch)-1; %SSE = tr.perf(length(tr.perf)); % PARÁMETROS DE LA RED W = red.IW{1,1}; B = red.b{1}; % REGISTRO DEL ENTRENAMIENTO errores = [SSE]; for iteracion=1:max_iteracion % FASE DE REVISIÓN: if SSE < meta_error, iteracion=iteracion-1; break, end
LW = W; LB = B; % FASE DE APRENDIZAJE: dW = learnwh(W,P,[],[],[],[],E,[],[],[],LP,[]); dB = learnwh(B,ones(1,Q),[],[],[],[],E,[],[],[],LP,[]); W = W + dW; B = B + dB; red.IW{1,1}=W; red.b{1}=B; % FASE DE PRESENTACIÓN A=sim(red,P); E=T-A; SSE = sumsqr(E); % REGISTRO DEL ENTRENAMIENTO errores = [errores SSE];
% PRESENTACIÓN DEL PROGRESO if rem(iteracion,presenta_frec) == 0 punto=plotep(W,B,SSE,punto); pause2(tiempopausa); drawnow end end red.IW{1,1} = W; red.b{1} = B; % GRÁFICA DE CLASIFICACIÓN FINAL punto=plotep(W,B,SSE,punto); pause set(gcf,'NextPlot','replace') % GRÁFICA DE LA CURVA DE ERROR semilogy(0:iteracion,errores,0:iteracion,meta_error*ones(1,iteracion+1
)); title ('Error de la Red') xlabel('iteraciones') ylabel('error cuadrado medio') pause; % GRÁFICA DE LOS ERRORES ASOCIADOS A CADA VECTOR DE
SALIDA %====================^========================„=„======= bar(T-A); title('Error de cada vector de salida')

xlabel('Salida') ylabel('error de cada salida') pause % RESUMEN DE RESULTADOS fprintf('\nVALORES DE LA RED ENTRENADA:\n') W; B; fprintf('Entrenada en %.0f iteraciones.\n' ,iteracion) fprintf('La meta del error cuadratico medio fue %g.\n',meta_error); fprintf('Error cuadratico medio final de %g.\n',SSE); fprintf('La red entrenada opera: '); if SSE < meta_error disp('Adecuadamente. ') else disp('Inadecuadamente. ') end
5. RESULTADOS
Los resultados que obtienen de la simulación del programa son los siguientes:

El calculo del error en la superficie misma es la que se muestra en la siguiente figura
El grafico discreto de error respecto a la salida deseada se muestra acontinuacion

6. CONCLUSIONES
La clasificación de datos se estima mediante el error que se muestra a la salida del
sistema y de acuerdo a este se va acondicionando el error
Los pesos que se ingresan al inicio son los que determinan la eficiencia de la red
Si se aumenta la cantidad de iteraciones se pueden conseguir mejores resultados
7. RECOMENDACIONES
Probar con distintos valores de tolerancia muy bajos.
Modificar los pesos iniciales de la entrada y comparar con los datos obtenidos
anteriormente.

INFORME N° 03
“BACKPROPAGATION”
8. OBJETIVOS
Conocer el funcionamiento de la red BACKPROPAGATION
Identificar los parámetros que intervinieren en este sisitema
Conocer las funciones propias del MATLAB para el entrenamiento de la neuronas
9. MATERIALES
o Software MATLAB
o Guía de Laboratorio
10. FUNDAMENTO TEORICO
3.1. CONCEPTO
Es la generalización del algoritmo de Widrow-Hoff para redes multicapa con funciones de
transferencia no-lineales y diferenciable. Una red neuronal con una capa de sigmoides es
capaz de aproximar cualquier función con un número finito de discontinuidades, propiedad de
la generalización. La función de transferencia es no-lineal, la superficie de error tiene varios
mínimos locales.
3.2. ALGORITMO BACKPROPAGATION
Descripción:
Tras inicializar los pesos de forma aleatoria y con valores pequeños, seleccionamos el
primer par de entrenamiento.
Calculamos la salida de la red
Calculamos la diferencia entre la salida real de la red y la salida deseada, con lo que
obtenemos el vector de error
Ajustamos los pesos de la red de forma que se minimice el error
f
f
f
n
n
n
Wb
b W
a
a
a
a
a
a
a
a
a
W
P RC
a
p
C
a
p

Repetimos los tres pasos anteriores para cada par de entrenamiento hasta que el error
para todos los conjuntos de entrenamiento sea aceptable.
Descenso por la superficie del error
Cálculo de derivadas del error respecto de los pesos y de las bias.
4. DESARROLLO
El programa que se desarrolló en el software es el siguiente
% EJEMPLO BCKPROl: RED CON SUPERFICIE DE ERROR NO LINEAL % una re consistente de una entrada alimentada a una sola % neurona sigmoidal-logaritmica, se entrena con backpropagation
'-" para resolver un problema de dos patrones. % La red sigue el gradiente descendente sobre
.la superficie de error % cuando la neurona ajusta sus pesos de entrada y umbral % para hallar un error mínimo. help bckpro1 clf reset tiempopausa = 0.2; % DEFINICIÓN DEL PROBLEMA % Define dos vectores de entrada de 1-elemento. P = [-3.0 +2.0]; % Define los des vectores deseados de 1-elemento. T = [+0.4 +0.3]; % GRÁFICO DE ALAMBRE DEL ERROR %„================= fprintf('Calculando la superficie de error, por favor
espere...\n\n'); Wrango = -4:.4:4; Brango = -4:.4:4; SE = errsurf(P,T,Wrango,Brango,'logsig'); disp('Presione cualquier tecla para ver la superficie de error. '), disp
(''),pause plotes(Wrango,Brango,SE); figura=gcf; subplot(1,2,1) title('Gráfica de la Superficie de Error') xlabel('Peso W'); ylabel('-Umbral B'); zlabel('Error Cuadrado Medio'); subplot(1,2,2) title('Gráfico de Contorno del Error') xlabel('Peso W'); ylabel('umbral B'); pause % INICIALIZACIÓN DE LA ARQUITECTURA DE LA RED %======================„==============„=„= % Encuentra el tamaño del vector de entrada R, tamaño de la capa S,
tamaño del lote Q. [R,Q1] = size(P); [S,Q] = size(T); red = newff(minmax(P),S,{'logsig'}); % Inicíalización de pesos y umbral.

z = menu( 'Inicializar Pesos y Umbral a: ', ... 'Condiciones en la Guia del Estudiante', ... 'Colocar valores con el Ratón/Teclas de desplazamiento', ... 'Valores Aleatorios'); disp ('') if z == 1 red.IW{1,1} = [-2.1617]; red.b{1} = [-1.7862]; elseif z == 3 red.inputweights{1,1}.initFcn = 'rands'; red.biases{1}.initFcn = 'rands'; red=init(red); end % GRÁFICA DE CONTORNO DEL ERROR, CONDICIONES INICIALES, SOLUCIÓN
DISEÑADA figure(figura) subplot(1,2,2) axis ('equal') if z == 2 title ( 'SELECIONE W y B AQUÍ') [red.IW{1,1},red.b{1}] = ginput(1); title('Gráfico de Contorno del Error') end %FASE DE PRESENTACIÓN: A=sim(red,P); E=T-A; SSE=sumsqr(E); punto=plotep(red.IW{1,1},red.b{1},SSE); pause2(tiempopausa); % entrenamiento de la red % parametros de entrenamiento presenta_frec = 1; max_iteracion = 100; meta_error = 0.001; razon_aprendiz = 1; red.trainParam.show = presenta_frec; red.trainParam.goal = meta_error; red.trainParam.epochs = max_iteracion; red.trainParam.Ir = razon_aprendiz; lr = razon_aprendiz; % NOTA: El resto del código de entrenamiento puede reemplazarse % por: % [red, trl=train(red,P,T); % PARÁMETROS DE LA RED W = red.IW{1,1}; B = red.b{1}; % REGISTRO DEL ENTRENAMIENTO errores = [SSE]; for iteracion=1 :max_iteracion % FASE DE REVISIÓN if SSE < meta_error, iteracion=iteracion-1; break, end % FASE DE APRENDIZAJE D = A.*(1-A).*E; dW = D*P'*lr; dB = D*ones(Q,1)*lr; W = W + dW; B = B + dB; red.IW{1,1}=W; red.b{1}=B;

% FASE DE PRESENTACIÓN A = sim(red,P); E = T-A; SSE = sumsqr(E); % REGISTRO DEL ENTRENAMIENTO errores = [errores SSE]; % PRESENTACIÓN DEL PROGRESO if rem(iteracion,presenta_frec)== 0 punto=plotep(W,B,SSE,punto); pause2(tiempopausa); drawnow end end red.IW{1,1} = W; red.b{1} = B; % GRÁFICA DE CLASIFICACIÓN FINAL punto=plotep(W,B,SSE,punto); pause set(gcf,'NextPlot','replace') % GRÁFICA DE LA CURVA DE ERROR semilogy(0:iteracion,errores,0:iteracion,meta_error*ones(1,iteracion+1)); title('Error de la Red') xlabel('iteraciones') ylabel('error cuadrado medio') pause; % GRÁFICA DE LOS ERRORES ASOCIADOS A CADA VECTOR DE SALIDA bar(T-A); title('Error de cada vector de salida') xlabel('Salida') ylabel('error de cada salida') pause % RESUMEN DE RESULTADOS fprintf('\nVALORES DE LA RED ENTRENADA:\n') W; B; fprintf('Entrenada en %.0f iteraciones.\n',iteracion) fprintf('La meta del error cuadrático medio fue %g.\n',meta_error); fprintf('Error cuadratico medio final de %g.\n',SSE); fprintf('La red entrenada opera: '); if SSE < meta_error disp('Adecuadamente.') else disp('Inadecuadamente') end
5. RESULTADOS
Los resultados que obtienen de la simulación del programa son los siguientes:

El calculo del error en la superficie misma es la que se muestra en la siguiente figura
El grafico de la aproximaxion al error deseado en la funcion se muestra en la figura anterior

6. CONCLUSIONES
La clasificación de datos se estima mediante el error que se muestra a la salida del
sistema y de acuerdo a este se va acondicionando el error
Los pesos que se ingresan al inicio son los que determinan la eficiencia de la red
Si se aumenta la cantidad de iteraciones se pueden conseguir mejores resultados
7. RECOMENDACIONES
Probar con distintos valores de tolerancia muy bajos.
Modificar los pesos iniciales de la entrada y comparar con los datos obtenidos
anteriormente.