ANEXO DEL PROYECTO DE INVESTIGACIÓN SIP 2005 Generación...
16
Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 1 ANEXO DEL PROYECTO DE INVESTIGACIÓN SIP 2005 Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos Clave: 20051157 Resumen En este proyecto se propone un mecanismo alternativo para la representación de datos espaciales. Este mecanismo consiste en construir una ontología general para objetos geográficos, la cual está compuesta de las propiedades, relaciones y funciones esenciales que describen el comportamiento de cada una de las primitivas de representación espacial. Con esta ontología se puede expresar de manera formal la semántica de los datos espaciales. El sistema está compuesto por un sistema de información geográfica (GIS) y por una base de conocimiento, la cual se encarga de almacenar todo el conjunto de reglas que describen a las propiedades de los objetos geográficos. Con la interacción de estos componentes se busca solucionar en forma parcial, problemas de heterogeneidad, interoperabilidad e integración de información espacial para su posterior procesamiento, y la cual se encuentre libre de ambigüedades y pueda ser compartida en forma transparente. Introducción Hoy en día, las bases de datos espaciales son herramientas muy poderosas y utilizadas para manejar, desplegar y procesar la información geográfica. Estas bases de datos integran Sistemas de Información Geográfica (GIS), los cuales están diseñados para almacenar y procesar los datos espaciales, los cuales son extremadamente complejos y mixtos. De igual forma, para evitar cualquier tipo de ambigüedad en el procesamiento e interpretación, los datos geográficos deben contar con buena calidad desde el proceso de entrada hasta su representación. Esto significa que el procesamiento inteligente de los datos espaciales es extremadamente importante para mejorar el modelo de decisiones en diferentes campos de operación. Por lo tanto, una de las principales tendencias en el área de la Geocomputación contemporánea es la correcta representación de los datos espaciales, preferentemente con base en el conocimiento de un ambiente espacial en particular. A su vez, uno de los beneficios que la sociedad ha obtenido con el desarrollo de estos sistemas radica en que los GISs pueden ser utilizados para asistir en la toma de decisiones. Este tipo de asistencia podría realizarse en forma visual o descriptiva y a su vez, estas formas de representación se pueden realizar en forma manual o automática. Es por ello, que el tratamiento de la información espacial (datos geográficos) es de suma importancia en todas las actividades en las que interactúan los GISs. Por otra parte, cabe señalar que existen muchas formas de representar objetos espaciales, pero no encontramos ninguna que considere las propiedades, relaciones y funciones en un contexto semántico para la representación espacial. En este proyecto, se definió parcialmente una teoría enfocada hacia este fin; así como un mecanismo que pueda representar de manera formal a la información espacial, de acuerdo con sus propiedades, relaciones y funciones dentro de un contexto específico. Con este proyecto, se propone una técnica para definir y utilizar las propiedades, relaciones y funciones de los datos espaciales para explorar su semántica, orientando esta investigación al
Transcript of ANEXO DEL PROYECTO DE INVESTIGACIÓN SIP 2005 Generación...

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 1
ANEXO DEL PROYECTO DE INVESTIGACIÓN SIP 2005
Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos
Clave: 20051157
Resumen En este proyecto se propone un mecanismo alternativo para la representación de datos espaciales. Este mecanismo consiste en construir una ontología general para objetos geográficos, la cual está compuesta de las propiedades, relaciones y funciones esenciales que describen el comportamiento de cada una de las primitivas de representación espacial. Con esta ontología se puede expresar de manera formal la semántica de los datos espaciales. El sistema está compuesto por un sistema de información geográfica (GIS) y por una base de conocimiento, la cual se encarga de almacenar todo el conjunto de reglas que describen a las propiedades de los objetos geográficos. Con la interacción de estos componentes se busca solucionar en forma parcial, problemas de heterogeneidad, interoperabilidad e integración de información espacial para su posterior procesamiento, y la cual se encuentre libre de ambigüedades y pueda ser compartida en forma transparente. Introducción Hoy en día, las bases de datos espaciales son herramientas muy poderosas y utilizadas para manejar, desplegar y procesar la información geográfica. Estas bases de datos integran Sistemas de Información Geográfica (GIS), los cuales están diseñados para almacenar y procesar los datos espaciales, los cuales son extremadamente complejos y mixtos. De igual forma, para evitar cualquier tipo de ambigüedad en el procesamiento e interpretación, los datos geográficos deben contar con buena calidad desde el proceso de entrada hasta su representación. Esto significa que el procesamiento inteligente de los datos espaciales es extremadamente importante para mejorar el modelo de decisiones en diferentes campos de operación. Por lo tanto, una de las principales tendencias en el área de la Geocomputación contemporánea es la correcta representación de los datos espaciales, preferentemente con base en el conocimiento de un ambiente espacial en particular. A su vez, uno de los beneficios que la sociedad ha obtenido con el desarrollo de estos sistemas radica en que los GISs pueden ser utilizados para asistir en la toma de decisiones. Este tipo de asistencia podría realizarse en forma visual o descriptiva y a su vez, estas formas de representación se pueden realizar en forma manual o automática. Es por ello, que el tratamiento de la información espacial (datos geográficos) es de suma importancia en todas las actividades en las que interactúan los GISs. Por otra parte, cabe señalar que existen muchas formas de representar objetos espaciales, pero no encontramos ninguna que considere las propiedades, relaciones y funciones en un contexto semántico para la representación espacial. En este proyecto, se definió parcialmente una teoría enfocada hacia este fin; así como un mecanismo que pueda representar de manera formal a la información espacial, de acuerdo con sus propiedades, relaciones y funciones dentro de un contexto específico. Con este proyecto, se propone una técnica para definir y utilizar las propiedades, relaciones y funciones de los datos espaciales para explorar su semántica, orientando esta investigación al

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 2
desarrollo de una representación de conocimiento geográfico por medio de una ontología espacial que permita describir datos topográficos. El objetivo de estudiar el conjunto de propiedades, relaciones y funciones de los objetos geográficos es de gran relevancia, ya que de esta forma se evalúan todos los aspectos que intervienen en la información espacial, obteniendo como resultado la semántica de vocabulario de los sistemas de objetos geográficos. Con la semántica espacial de objetos geográficos, es posible analizar la interacción de diversos fenómenos de un área común, además de poderlos representar adecuadamente a diferentes niveles de detalle de conocimiento, dependiendo del propósito o caso de estudio; es decir, a partir del dominio del sujeto (subject domain) o contexto de los sistemas de objetos geográficos. Para definir la semántica espacial es necesario conocer las propiedades, funciones y relaciones que presentan cada una de las primitivas de representación geográfica y cómo interactúan entre sí, por lo cual éste es considerado un proceso sumamente complejo en el cual intervienen diversos factores tales como sociales, humanos, naturales y tecnológicos. Para el desarrollo de este proyecto, se necesitó del soporte de diferentes técnicas para el análisis y procesamiento de la información geográfica, tales como modelado espacial y de inteligencia artificial. Este conjunto de técnicas proporcionaron un modelo, el cual define la semántica espacial de los objetos geográficos por medio de un conjunto de reglas almacenadas en una base de conocimiento a partir de una ontología general. En la actualidad, el área de la Geocomputación ha demostrado que necesita del auxilio de diferentes campos de conocimiento, ya que las necesidades que se presentan hoy en día no pueden ser solucionadas con técnicas clásicas de Geoprocesamiento; tal es el caso de la representación formal de objetos geográficos basada en sus propiedades, funciones y relaciones. Por tal motivo, es indispensable hacer uso de diferentes técnicas que proporcionen este mecanismo, básicamente utilizando inteligencia artificial y particularizándolo en taxonomías, jerarquías y ontologías, las cuales clasifiquen, describan y representen un conocimiento espacial. En el campo de la Geocomputación, los GISs no exploran todavía extensiblemente la semántica de los datos espaciales; por lo tanto, para desarrollar una definición de este tipo se necesita hacer uso de diferentes técnicas que puedan procesar las propiedades y relaciones de los objetos geográficos para describir su comportamiento. Bajo esta premisa, el análisis espacial puede utilizar mecanismos alternativos para representar los datos espaciales, ya que se pueden utilizar reglas de inferencia con base en las propiedades y funciones de las primitivas de representación, y éstas pueden estar almacenadas en una base de conocimiento. Estas reglas son diseñadas para generar conceptos nuevos que formen o representen ontologías espaciales. Por lo tanto, estos conceptos estarán definidos por el comportamiento de los sistemas de objetos espaciales, los cuales son explorados a través de la experiencia humana, básicamente con los procedimientos que define el Instituto Nacional de Estadística, Geografía e Informática (INEGI). En este sentido, el conocimiento puede ser una interpretación filosófica y el reflejo de los aspectos semánticos de la realidad geográfica a través del cerebro humano. En general, el utilizar esta técnica permitirá buscar y representar correctamente objetos geográficos para un procesamiento subsecuente. Es importante señalar que en la presente propuesta se desarrolló una técnica que permite generar una ontología espacial (base) por medio de un conocimiento a priori de los datos

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 3
espaciales y de esta forma poder procesar los objetos geográficos de una base de datos espacial. Hipótesis El presente proyecto introdujo una estructura basada en una ontología, la cual permitirá integrar y representar la información geográfica de acuerdo con su semántica. Proponemos que la integración de datos espaciales se realice a través de las propiedades, relaciones y funciones que envuelven a los objetos geográficos y que definen su semántica, la cual puede ser obtenida por medio de una descripción a partir de una ontología base, y con base en un contexto específico. Por lo tanto, las preguntas principales sobre el problema planteado y hacia donde se dirige esta investigación, son las siguientes:
¿Cuáles son los componentes que definen la semántica espacial de los objetos geográficos?
¿Cómo se puede obtener una ontología base que envuelva el contexto espacial?
¿Para qué sirve generar una descripción de un contexto geográfico a partir de una
ontología espacial?
¿Cómo puede medirse el contenido semántico de una descripción espacial?
Las respuestas a estas preguntas se enfocan en el desarrollo de una estructura para la integración y representación formal del conocimiento de la geo-información, basándose en la semántica espacial. Asimismo, con base en el desarrollo de algunas investigaciones realizadas, hemos considerado que para definir la semántica espacial es necesario conocer el conjunto de propiedades, relaciones y funciones esenciales que describen a los objetos geográficos. En este caso, se define al conocimiento a priori como el conocimiento previo y registrado que se tiene sobre los objetos geográficos (datos espaciales), ya sea por medio de la experiencia humana (expertos en el área) o por un conjunto de especificaciones explícitas (estándares generados por INEGI) que permitan definir este conocimiento. Por tal motivo, es necesario partir del análisis y acuerdos compartidos1, los cuales permitan describir las características de los objetos geográficos para obtener un conocimiento a priori, el cual se define como el conocimiento previo y registrado que se tiene sobre los objetos geográficos (datos espaciales), ya sea por medio de la experiencia humana (expertos en el área) o por un conjunto de especificaciones explícitas (i.e. estándares generados por el INEGI) que permitan definir este conocimiento. Este conocimiento a priori puede clasificarse para diseñar una ontología espacial tosca2 que permita reflejar la semántica de un sistema de objetos geográficos, de acuerdo con un contexto específico, a través de una descripción simbólica3 obtenida de la ontología espacial. Este mecanismo de descripción sirve para obtener la semántica espacial de un sistema de objetos geográficos y puede considerarse como una representación semántica, la cual es un método alternativo para la integración y representación formal de datos espaciales. Adicionalmente, este mecanismo sólo considera los objetos geográficos que componen una partición espacial vectorial; es decir, está orientada hacia la descripción semántica de mapas vectoriales, considerando todas las propiedades, relaciones y funciones intrínsecas que componen a esta partición.
1 Acuerdos compartidos hace referencia a la definición de Gruber de ontología, la cual puede definirse como una especificación explícita de una conceptualización compartida. 2 Tosca se refiere a una ontología base, debido a que cuenta con un nivel de abstracción alto, pero no detallado en cuanto a conceptos específicos se refiere. 3 Esta descripción simbólica podemos considerarla como un subconjunto de la ontología espacial tosca, por lo tanto ésta es considerada una ontología más detallada de acuerdo al contexto determinado.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 4
Con respecto al contenido semántico que contiene una descripción espacial; éste puede ser evaluado por medio de otra descripción espacial que corresponda a un contexto diferente, pero compuesto por el mismo sistema de objetos geográficos, el cual a través de alguna métrica defina valores cuantitativos de similitud entre ambas descripciones. Por lo tanto, la hipótesis de investigación de esta tesis es: Un modelo que genera descripciones espaciales a partir de una ontología espacial,
proporciona la semántica espacial de un sistema de objetos geográficos, de acuerdo con un contexto específico.
Metodología En una orientación filosófica, semántica4 puede ser definida como el estudio del significado en algún sentido de un término. En este caso, la semántica es considerada como un proceso de abstracción, el cual es utilizado para expresar apropiadamente la esencia de algún contexto. Otras definiciones relacionadas con semántica son descritas a continuación. Semántica es un subcampo de la lingüística que es definido tradicionalmente como el estudio del significado de las palabras, frases sentencias y textos. La semántica puede ser tecnificada desde un punto de vista teórico al igual que un punto de vista empírico. La perspectiva de descomposición orientada a significados sostiene que el significado de palabras puede ser analizado definiendo significados atómicos o primitivos, las cuales establecen un lenguaje del pensamiento. Un área de estudio es el significado de los compuestos, otra área es el estudio de la relaciones entre diferentes expresiones lingüísticas tales como: homónimos, sinónimo, antónimos, etc.). La semántica incluye el estudio de roles temáticos, argumento de estructuras y sus enlaces hacia la sintaxis. Ésta negocia con el sentido y referencia, condiciones de verdad y análisis de discurso. La pragmática es considerada frecuentemente como una parte de la semántica, la cual se encarga de los procesos de abstracción de los significados. Muchas de las técnicas formales aplicadas a semántica son la lingüística, lógica matemática y ciencias de la computación, todas estas técnicas para el procesamiento semántico son originadas e influenciadas por las ideas del ser de Alfred Tarski, en su modelo semántico de la teoría de la verdad. Además, la semántica de roles de inferencia tiene sus raíces en el trabajo de Gerhard Gentzen sobre su teoría de prueba y semántica teórica de prueba. Otras definiciones consideran que la semántica es parte de la estructura del lenguaje, incluyendo la fonología, morfología, sintaxis y pragmática, las cuales envuelven el entendimiento del significado de las palabras, sentencias u oraciones, y textos. En este caso, la semántica es preservada por encima de los contextos, los cuales están relacionados al tema especificado. En adición, la semántica puede considerarse como un modelo de resolución de conocimiento, porque encapsula todos los términos entendidos por la mente humana5. Por otra parte, la semántica no es solo un área en donde las ideas lingüísticas son utilizadas en el análisis de los mapas. En los setentas, la teoría de la comunicación fue tal vez el paradigma más dominante para el entendimiento de cómo los mapas transportan información. Esta estructura deriva del estudio de la transmisión de información y reducción de ruido en Ingeniería. Esto consiste típicamente de una fuente (el productor del mapa) enlazado a un recipiente (el usuario del mapa), a través de un canal (el mapa por sí mismo), algunas veces con un “codificador” entre la fuente y el canal, y un “decodificador” entre el canal y el recipiente. De acuerdo con estas aseveraciones, hemos considerado que es posible hacer una analogía entre el lenguaje y los mapas, porque ambos componentes contienen estructuras definidas, y nuestro trabajo está orientado a formalizar representaciones cartográficas. Este es un problema complejo, porque los mapas están definidos en diferentes contextos; en este caso los contextos 4 Del Griego semantikos o “significado”, derivado de sema “signo”. 5 La esencia cognoscitiva producida por la semántica, es representada por medio de mapas mentales.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 5
pueden ser el propósito del mapa, enfoque a cierta audiencia, escala, propiedades y relaciones entre objetos geográficos, métodos de representación cartográfica, entre otros. En este sentido, cuando observamos cómo varios conjuntos de signo, inherentes en los mapas, proporcionan un significado explícito para especificar relaciones y componentes que definen a la representación cartográfica. Tal vez, lo más importante es reconocer que los mapas son herramientas poderosas, ya que proporcionan un significado para fusionar fundamentalmente diferentes categorías de significado. Estas categorías son significados acerca del espacio, tiempo y atributos; más haya de esta taxonomía básica del significado, están las preguntas con respecto a la especificación de las relaciones de los símbolos, direcciones de referencia, interpretación, entre otros elementos. Definición inicial de semántica espacial De acuerdo con las aseveraciones presentadas en la sección anterior, para proporcionar una definición de semántica espacial, es necesario definir apropiadamente el dominio de aplicación o el contexto para conocer cuáles son los requerimientos de un mapa o el propósito del mismo, entre otros factores. Una definición inicial de la semántica de un mapa sería:
Es el significado (vocabulario que se define en forma gráfica) del contenido de información (cantidad de datos inmersos en los objetos geográficos) que un mapa puede proporcionarnos, lo cual dependerá siempre del contexto.
Sin embargo, esta aseveración rompe con la idea intuitiva, en este caso de que la semántica (de algún objeto) es única. Por ejemplo, “Juan Pérez” es “Juan Pérez”; aunque él cambie de sexo o llegara a ser un abogado. En este caso los mapas preservan la misma esencia, sin considerar la interpretación para la cual han sido elaborados. Por lo tanto, podemos decir que esto es verdad, pero también creemos que no es posible obtener esta esencia, al menos no en forma completa; porque si la esencia es obtenida, significa que tenemos una forma para representarla6. De acuerdo con este punto de vista expresamos a la semántica espacial como sigue:
La semántica de los mapas existe, pero ésta no puede ser obtenida completamente, puesto que es abstracta. Solo tenemos algunas representaciones aproximadas acerca de ésta. Además, estas representaciones contienen una parte de la semántica entera, por lo tanto estas representaciones solo indican una semántica parcial, la cual puede ser representada o expresada por medio de ontologías.
Por ejemplo el caso de una parábola, podemos obtener diferentes representaciones de ésta:
a) Multiplicando un número por sí mismo. b) Elevando al cuadrado un número. c) ( ) 2xxf = d)
En todos los casos de representación, la semántica es la misma: concepto “parábola”. Sin embargo, cada representación contiene diferentes contenidos de información, de acuerdo con el nivel de expresión. Estos contenidos son representados por medio de la cantidad de información que puede ser medida y que representa el valor intrínseco de interpretación y análisis que ofrece una representación.
6 Esta representación depende directamente del caso de estudio.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 6
Por ejemplo, una persona que tiene un nivel escolar de secundaria, podría asegurar que las representaciones a y b son la misma cosa, pero probablemente el no podría decir nada con respecto a las representaciones c y d. Entonces, ¿Cuál es la relación que existe entre semántica y cantidad de información?, ¿Qué es lo que puede obtenerse acerca del objeto de estudio? De acuerdo con estas preguntas, ambos casos son equivalentes, solo que las representaciones contienen únicamente una semántica en forma parcial. Considerando el ejemplo de la parábola, la cantidad de información dependerá del conocimiento a priori que tengamos del objeto de estudio. Por lo tanto, la semántica de los mapas dependerá de dos factores: la riqueza de la representación y el conocimiento que se tenga acerca de una representación específica. Esto puede ser expresado como sigue (ver ecuación 1):
,,, ⟩⟨= dcr SSSS (1)
donde: S es la semántica de los mapas. Sr es la representación semántica de los objetos geográficos, los cuales contienen un significado7. Sc es la semántica dada por el conocimiento a priori. Sd es la semántica desconocida de algunos objetos geográficos involucrados en el mapa. Por lo tanto, la triada de componentes mostrados en la ecuación 1, envuelve la semántica de los mapas, ya que el conjunto de elementos de cada componente representa un contenido semántico, de acuerdo con su tipo de dominio, propiedades y relaciones que se encuentran inmersas intrínsecamente. En este punto, decimos que la semántica puede ayudarnos a realizar cambios en la representación. Algunos ejemplos son los siguientes: para el cambio en la representación de objetos geográficos a representaciones conceptuales, para modificar escalas por medio de la generalización cartográfica, para construir una representación raster a una representación más compacta. Los resultados producidos por los cambios de representación son equivalentes semánticamente a la representación original. Por otra parte, hemos decidido agregar un término nuevo, el cual puede ser útil para definir la semántica espacial. El objetivo, el cual es un parámetro que sirve para seleccionar la cantidad de información semántica requerida para solucionar el problema. Este término depende del usuario del mapa, de los métodos de representación cartográfica, escala, temáticas involucradas y la cantidad de información. El objetivo es definido por el contexto y el contexto es definido por los problemas a solucionar. El contexto es un tema clave en la interacción entre hombre y máquina, describiendo los hechos que rodean y que agregan un significado. De acuerdo con el estado del arte, hemos definido contexto como una descripción de una situación actual sobre un nivel abstracto, derivado de las señales que están disponibles. En un ámbito espacial, el significado de un concepto espacial puede ser dependiente de un gran número de contextos dentro de los cuales el concepto es utilizado. Por lo tanto, el contexto selecciona la semántica requerida de un mapa. Por ejemplo, si el contexto es “hidrología”, entonces la semántica de un “mapa topográfico” es restringida por ese contexto. Puesto que conocemos que un mapa topográfico tiene más información que un mapa hidrológico, entonces un mapa de un río y otro de cuerpos de agua proporcionan la misma información que un mapa topográfico, siempre y cuando ambos mapas hayan sido procesados en el mismo contexto. Por lo tanto, el contexto de un problema selecciona la semántica que es requerida por un objeto de estudio para solucionar el problema. En este caso proponemos algunas definiciones relacionadas con semántica:
7 Es la cantidad de información que es proporcionada por la representación.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 7
Problema u objetivo (P). Cuenta con un estado inicial y final; es decir, un objeto de estudio (Oi), un objeto resultado (Of) y un conjunto de restricciones (K) que involucran el problema u objetivo (ver ecuación 2).
mmfim KKKOOP →= ,,, (2)
Contexto (Ψ). Este es denotado por los problemas que pueden definirse dentro de si mismo (ver ecuación 3).
Um
mP=ψ (3)
Por lo tanto, la semántica es siempre definida por un contexto específico y está dada por una colección de objetos geográficos (un mapa), tal que un punto dentro del espacio semántico es definido por el contextoΨ. Ontologías para la conceptualización de datos espaciales Hoy en día las ontologías se han establecido como una herramienta poderosa para habilitar conocimiento compartido; de igual forma el crecimiento del número de aplicaciones ha beneficiado el uso de ontologías en aplicaciones que involucran interoperabilidad semántica, minería de datos, agentes, sistemas distribuidos, representación del conocimiento, comercio electrónico, integración inteligente de información, servicios Web y semántica para la Web. De acuerdo con la definición de Gruber, una ontología es una especificación formal y explícita de una conceptualización compartida. Esta definición contiene aseveraciones importantes tales como:
Conceptualización se refiere a un modelo abstracto de algún fenómeno en el mundo, habiendo identificado los conceptos relevantes de ese fenómeno.
Explícita significa que los tipos de conceptos y las restricciones utilizadas en el
contexto son definidas explícitamente. Formal se refiere al hecho de que la ontología puede ser leída por una máquina.
Compartida refleja la noción de que una ontología captura conocimiento
consensuado; es decir, éste no es privado de algún individuo, sino aceptado por un grupo.
En ciencias geo-espaciales, consideramos que las ontologías son un mecanismo de representación alternativa para objetos geográficos. Aquí se propone el uso de una ontología para generar una descripción de datos espaciales, de acuerdo con un contexto específico. En el apartado anterior, se presentaron varias definiciones de semántica y finalizamos que la analogía de los mapas puede definirse por medio de estructuras orientadas a formalizar una descripción cartográfica, de acuerdo con sus características intrínsecas. Esta aseveración depende directamente del contexto, del mismo modo es importante considerar el dominio de las estructuras espaciales. La técnica propuesta8 propone definir un contexto9 para obtener la semántica espacial de los datos espaciales por medio de una descripción obtenida de la ontología espacial. Por lo tanto, hemos definido a un mapa como una partición espacial Ω en dos dimensiones dentro de un universo de objetos geográficos αi, el cual consiste de un conjunto de primitivas de representación. Ω es el conjunto de particiones de las primitivas de representación que
8 Análisis y Síntesis Semántica Asociativa de Datos Espaciales. 9 El contexto en este caso está orientado hacia mapas vectoriales topográficos en dos dimensiones.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 8
pueden existir en la partición espacial Ω y éstas son representadas en la misma partición (ver ecuación 4).
U UUn
i
q
kk
p
jjpppi proprelrrr
apl1 11
,,,= ==
⟩⟨⟩⟨⟩⟨==Ω α (4)
donde:
lpr es la primitiva de representación “línea”.
ppr es la primitiva de representación “punto”.
apr es la primitiva de representación “área”.
jrel es el conjunto de relaciones entre objetos geográficos αi.
kprop es el conjunto de propiedades de los objetos geográficos αi. En este caso, ζ es el conjunto de primitivas de representación espacial, el cual envuelve al universo de objetos geográficos y se denota a través de la ecuación 5.
Un
ipppi apl
rrr1
,,=
⟩⟨== αζ (5)
De igual forma, δ representa el conjunto de relaciones que se encuentran inmersas en los objetos geográficos, las cuales se denotan por medio de la ecuación 6.
Up
jjrel
1=
⟩⟨=δ (6)
Por último, ρ representa el conjunto de propiedades intrínsecas y extrínsecas que envuelven a los objetos geográficos que componen a un mapa vectorial en dos dimensiones (ver ecuación 7).
Uq
kkprop
1=
⟩⟨=ρ (7)
Por lo tanto, la tripleta de componentes ζ, δ y ρ de toda la información (objetos geográficos, relaciones y propiedades) contenidas en una partición espacial Ω definen a un mapa Ω (ver ecuación 8).
⟩⟨=Ω ρδζ ,, (8)
De acuerdo con la definición de Ω, éste tiene una semántica única relacionada con la dependencia del contexto. En este caso con respecto a la interpretación, podemos obtener diferentes aproximaciones. Por ejemplo, personas que tienen un cierto conocimiento en un campo determinado pueden obtener más información acerca de un mapa, que personas que no tienen conocimientos cartográficos. No obstante, la información que puede obtenerse acerca de un mapa depende del conocimiento para manejar e interpretar los datos. Sin embargo, en este caso la semántica del mapa es simple y ligeramente ambigua10. Por otra parte, hemos hablado con respecto a que no solo la información que es obtenida de un mapa es suficiente para obtener la semántica, sino también es necesaria la cantidad de
10 Un ejemplo de esto es un mapa para llegar de nuestra casa a la escuela.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 9
información que puede obtenerse del mismo, dependiendo del conocimiento que se tenga acerca de él. Con respecto a esta aseveración, es necesario considerar otros aspectos a la vez, tales como el uso del mapa, su propósito, etc. De acuerdo con estos aspectos, es indispensable contar con un conocimiento a priori acerca del mapa para obtener soluciones específicas que puedan aparecer en las etapas de interpretación y análisis. Por lo tanto, para obtener la semántica espacial, es importante conocer el dominio del sujeto que envuelve a los objetos geográficos, porque la semántica depende directamente del contexto. En este caso proponemos una definición intuitiva de dominio del sujeto, la cual puede utilizarse como una alternativa para describir las características que contiene un mapa por medio del conocimiento a priori del mismo.
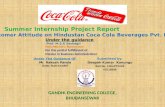
Éste puede definirse como un conjunto de “nombres” que describen las características por las cuales están compuestas los objetos geográficos, partiendo de las primitivas de representación espacial. Asimismo, podemos iniciar con el conocimiento a priori acerca de los objetos geográficos que aparecen, i.e. en la leyenda de un mapa. En este caso, las líneas “azules” están unidas bajo el concepto11 “río” y las “negras” están unidas bajo el concepto “fractura”, etc. En sentido inverso, los conceptos diferentes están unidos bajo la misma descripción de la representación espacial, la cual es “línea” (ver Figura 1).
Figura 1. Descripción de conceptos espaciales basados en el conocimiento a priori en el dominio espacial
del sujeto Como hemos mencionado anteriormente, no es posible describir la semántica completa o entera de un mapa Ω, entonces se intenta definir una semántica parcial S’ (ver ecuación 9).
),,()',','(' ⟩⟨⊂⟩⟨ ρδζρδζ SS (9)
En este caso, la semántica parcial está definida por el conjunto de primitivas de representación espacial que describen a los objetos geográficos en una partición espacial, así como por el conjunto de relaciones y propiedades. Por tal motivo, la semántica parcial es un subconjunto de la semántica S, tal como lo indica la ecuación 10.
( ) ( )Ω⊂Ω SS ' (10)
De acuerdo con las definiciones anteriores, es necesario definir la semántica parcial en términos de la descripción de un mapa; por lo tanto, en este caso se consideran los conceptos C que se encuentran inmersos en un mapa, a través de los objetos geográficos representados por las primitivas espaciales ζ’ es subconjunto de ζ, así como el conjunto de relaciones R definidas en δ’ que son subconjunto de delta y ρ’ subconjunto de ro. En este caso DΩ denota la descripción de un mapa Ω, la cual se define en la ecuación 11. 11 Este concepto representa un “nombre”.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 10
⟩⟨=Ω RCD , (11)
Por lo tanto la semántica parcial, estará definida en términos de la descripción de un mapa, basada en conceptos, relaciones y propiedades, tal como lo muestra la ecuación 12.
( ) Ω=Ω DS ' (12)
Una de las principales motivaciones de esta tesis, es poder generar una representación rica en semántica, enlazando las relaciones y propiedades de los objetos geográficos. En adición, con esta representación, los objetos geográficos pueden analizarse como una representación del mundo real, puesto que en la realidad una relación intrínseca entre entidades espaciales existe. En este trabajo se pretende definir una ontología con dos tipos de conceptos básicos: concepto terminal (CT) y concepto no terminal (CN). Los conceptos terminales son aquellos que no utilizan otros conceptos para definir su significado12. Los conceptos no terminales definen su significado basándose en otros conceptos13 (ver ecuación 13).
,U TN CCC = (13)
En este caso, cada concepto contiene un conjunto de atributos. Desde este punto de vista, todos los atributos de un concepto terminal son simples, i.e., el tipo de todos los atributos pertenecen al conjunto de tipos de primitivas de representación TP, tal como lo describe la ecuación 14.
( ) ,|
,,,,,
Pii
P
TatipoaAestructuranenumeraciocadenacaracternumeroT
∈== (14)
donde: TP es el conjunto de tipos de primitivas. A es el conjunto de atributos. Entonces, el conjunto de conceptos terminales es definido por la ecuación 15.
( ) niAaaaacC inT ,...,1 ,,...,, 21 =∈∋= , (15)
donde: c es un concepto que contiene diversos atributos que pertenecen al conjunto de atributos A. De la misma forma, los conceptos no terminales tienen al menos un atributo que no pertenece al conjunto TP, el cual es denotado por la ecuación 16.
( ) niAaaaacC inN ,...1 ,,...,, 21 =∉∃∋= (16)
Finalmente, el conjunto de relaciones R, es definido por el conjunto de pares que están vinculados a Γ y Φ14. Desde la ecuación 17 se deduce formalmente que las relaciones que forman tanto Γ como Φ, son relaciones no reflexivas, no simétricas, pero transitivas. Nótese que intuitivamente estas propiedades deben cumplirse en términos de la descripción de un mapa Ω
12 Estos conceptos son definidos por valores simples. 13 Estos conceptos pueden ser terminales o no terminales. 14 Para darle al lector una idea intuitiva del significado de las relaciones Γ y Φ, el lector puede pensar que el conjunto Γ representa relaciones “has” y el conjunto Φ representa relaciones “is-a”.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 11
( ) ( ) U U CbCababaCbCababaRRR NN ∈∈Φ∈∈Γ== ΦΓ , ,|, , ,|, (17)
Utilizando las definiciones de reflexividad, simetría y transitividad que aparecen a continuación:
Reflexividad: ( ) AaRaa ∈∀∈ ,, Simetría: ( ) ( ) AbaRbaRab ∈∈→∈ , ,,, Transitividad: ( ) ( ) ( ) RcaRcbRba ∈⇒∈∧∈ ,,,
Utilizamos relaciones de los conjuntos de Γ y Φ, para demostrar que estas relaciones cumplen con las propiedades antes mencionadas, para este caso solo es necesario sustituir la relación ϕ y la relación φ en las definiciones de las propiedades de reflexividad, simetría y transitividad, tal como se muestra a continuación.
Reflexividad: ( ) Γ∈∀∈ ϕϕϕ ,, R Simetría: ( ) ( ) Γ∈∈→∈ φϕφϕϕφ , ,,, RR Transitividad: ( ) ( ) ( ) RRR ∈⇒∈∧∈ λϕλφφϕ ,,,
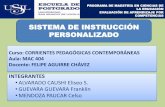
De igual forma, se demuestra que estas propiedades para el conjunto Φ. De acuerdo con el análisis del dominio espacial del sujeto15, se ha definido una ontología espacial base bajo el contexto de los mapas vectoriales en dos dimensiones. La ontología espacial considera todas las propiedades y relaciones de interés por medio de conceptos, bajo el contexto definido. Por lo tanto, la descripción es generada mapeando los datos espaciales a la ontología, de esta forma podemos evaluar los aspectos posibles que envuelven a los datos espaciales y extraer la semántica del mapa. Puesto que se intenta definir los conceptos en la ontología, se necesita elegir el concepto no terminal16 a ser descrito (esto significa seleccionar el aspecto a ser descrito). Este proceso continua hasta que se encuentra un concepto terminal. Una vez encontrado, el concepto terminal, es necesario seleccionar un par de objetos geográficos, posteriormente se debe verificar si la relación existe, en caso contrario una parte de la descripción necesita ser generada. Por otra parte, los conceptos terminales son definidos por el tipo de relación entre dos objetos. Como ejemplo, en la Figura 2 se presenta un fragmento de la ontología para mapas hidrológicos del tipo lineal. Esto indica que todos los elementos que componen la red hidrológica son representados por líneas (ríos y drenaje).
Figura 2. Fragmento de la ontología para mapas hidrológicos con un tipo lineal 15 En este caso el dominio espacial del sujeto está orientado a datos topográficos. 16 En este caso, el concepto no terminal puede iniciar por ejemplo con un mapa topográfico.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 12
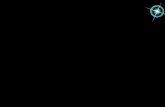
Como hemos denotado, la ontología espacial consiste de dos tipos de conceptos: no terminales y terminales, así como un conjunto de relaciones. Las relaciones que proporciona la ontología son las siguientes: “has” (Γ) y “is-a” (Φ). Como se observa en la Figura 5, se utilizan tres relaciones en la ontología; sin embargo, estas son utilizadas para denotar una simbología. La relación “has-a” es un caso particular de la relación “has”, la cual únicamente indica que la cardinalidad de la relación es exactamente 1. Por otra parte, es importante considerar que pueden existir diferentes ontologías (una para cada temática espacial) y éstas pueden ser unidas para formar una ontología base, como por ejemplo un mapa topográfico, el cual está compuesto de ríos, curvas de nivel, carreteras y ciudades. En la Figura 3 se presenta solo una parte de la ontología espacial para un mapa topográfico. Además es posible apreciar que los mapas hidrológicos (Figura 2) son un subconjunto de la ontología mostrada en la Figura 3. De igual forma, la Figura 3 muestra la ontología propuesta para construir la descripción de un mapa, la cual representa las relaciones entre las propiedades que involucran al mapa topográfico. Los conceptos de la Figura 3 son representados por “cajas con tres puntos”. Por ejemplo, en el caso de los conceptos, los cuales pueden ser puntuales, ya que existen dos conceptos (poblado “town” y aldea “village”), pero es posible que muchos otros puedan existir tales como: sitios arqueológicos, monumentos, pozos, edificios, etc. La ontología que se propone debe definir todos los conceptos necesarios requeridos para la descripción de los datos espaciales de acuerdo con los estándares del INEGI.
Figura 3. Fragmento de la ontología espacial para mapas topográficos

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 13
Por lo tanto, podemos decir que las descripciones espaciales que se pretenden generar son un subconjunto de la ontología base (en este caso de la ontología espacial para mapas topográficos). Así, la cantidad de información que puede obtenerse de un mapa vectorial está restringida por el contexto. Desde este punto de vista, el contexto también será un subconjunto de la ontología, la cual está representada por DΩ y tiene un nombre que describe un fenómeno o conjunto de objetos geográficos (i.e. topografía). El contexto también tiene un nombre, pero éste describe un sistema de objetos geográficos más particular, por ejemplo, topografía de México es subconjunto de topografía general. El contexto debe ser un subconjunto “bastante grande”, lo cual nos proporciona una idea de qué se trata la ontología base; es decir, me proporciona el concepto de la ontología base. En otras palabras, el contexto Ψ es un tipo de descripción de un mapa que no contiene valores específicos (ver ecuación 18).
( ) Ω⊂ΩΨ D (18)
Resultados En este apartado se presenta un caso de estudio sencillo, el cual es utilizado para mostrar cómo la ontología propuesta describe la semántica de los datos espaciales inmersos en un mapa. El mapa de la Figura 4 al cual se generará su descripción, contiene diferentes temáticas, las cuales están compuestas de diferentes capas, en donde cada capa presenta objetos de un tipo de primitiva de representación espacial.
Figura 4. Mapa temático al cual se genera su descripción semántica
De igual forma, en la Figura 4 se puede apreciar que el mapa contiene Poblados (Populations [POP]), una Red Hidrológica (Hydrologic Network [HYN]), Carreteras (Roads [ROD]) y Suelos (Soils [SOL]). En adición, cada temática y sus capas son presentadas en la leyenda, las cuales están denotadas por símbolos específicos. En este caso, el mapa está compuesto por 3 objetos puntuales, 6 objetos lineales y 5 objetos areales. El mapa de la Figura 4 muestra diversas situaciones que se presentan frecuentemente en mapas reales, ya que existen varias relaciones, propiedades y símbolos para cada objeto geográfico representado en la partición Ω. De esta forma, se pretende utilizar la ontología para describir el mapa. En la Figura 5 se muestra la descripción obtenida en una forma manual, en este caso se busca que la generación de estas descripciones se realice en forma automática. Además, se puede observar en la Figura 5 que la descripción inicia con el concepto no terminal llamado “Map”. Por lo cual, los conceptos no terminales son denotados por rectángulos y los valores de los conceptos terminales son representados por elipses.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 14
De acuerdo con el aspecto que contiene cada nodo no terminal, se establece una relación, la cual define otro concepto no terminal o terminal (dependiendo del caso u objetivo), proporcionando los objetos geográficos totales en la descripción que componen la partición (ver Figura 5). Por otra parte, las propiedades (aspectos) que pertenecen a cada nodo terminal contienen valores cuantitativos17. Adicionalmente, la ontología contiene todo el conjunto de relaciones, propiedades, símbolos, mediciones y conceptos en forma embebida con respecto al contenido del mapa. En la descripción semántica propuesta, es importante caracterizar previamente las relaciones espaciales, ya que no es posible considerar todas las relaciones18 posibles dentro de un proceso semántico. Esto se debe a que en casos reales no pueden ser considerados en su totalidad, por lo tanto se pueden generar errores de descripción en conjuntos de objetos geográficos grandes. En adición, cabe señalar que la descripción semántica depende directamente del contexto; por lo tanto no es posible contar con un contexto general, puesto que algunas ambigüedades semánticas pueden presentarse en la descripción. En este sentido, el contexto acota o define el objetivo del problema en cualquier ámbito; como en este caso, éste se orienta a generar descripciones semánticas de mapas topográficos. De acuerdo con la ecuación 18, el contexto sería un subconjunto de la descripción obtenida, es decir su significado se encuentra implícitamente inmerso en la descripción de los mapas topográficos, por lo cual su semántica también.
Figura 5. Descripción semántica del mapa temático presentado en la Figura 5
17 Estos valores se presentan en los datos espaciales, ya que se cuenta con la información descriptiva de los objetos geográficos. 18 Por ejemplo, es imposible considerar un conjunto de relaciones topológicas en forma global, como es el caso del modelo topológico 9-Intersección de Max Egenhofer, el cual presenta 29 relaciones topológicas posibles entre objetos geográficos.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 15
Esta técnica está enfocada en describir en una orientación general, el contenido semántico de un mapa. Sin embargo, la descripción dependerá del número de relaciones espaciales, propiedades y mediciones consideradas, por lo cual es posible incrementar la resolución semántica en la descripción19. Además, el mapa temático descrito preserva su contenido semántico. La descripción puede realizarse utilizando tuplas de conceptos no terminales y terminales relacionados entre sí, los cuales están denotados por (Concepto relación Concepto). Por ejemplo, el mapa de la Figura 4 está compuesto de varios objetos espaciales. La capa presenta la relación “is-a” (HWY is-a Linear Object). De igual forma, la relación topológica “Intersect” está presente entre Hw2 y Fw3, en donde ambos son objetos lineales. En la misma Figura, de acuerdo con la ontología, se observa que la relación “Intersect” es una relación topológica y al mismo tiempo una relación espacial, por lo cual esta relación es congruente con la descripción Fw3 Intersect Hw2. En la Tabla 5 se presentan todas las relaciones espaciales de acuerdo con la descripción de la Figura 8.
Tabla 1. Relaciones espaciales entre objetos geográficos
Objetos Vi2 Vg2 Vg1 Ct1 Fw3 Hw2 R1 R2 Tw1 ♠ ♦ Vi2 ♠ ♦ Vi1 ↑ ↓ Bw1 ♥ Vg2 ♥ ♥ Vg1 ♥ Br1 ♠ ♦ Fw3 ♣ Hw2 ♣ R1 ♦ D1 ♦
♣=Intersect, ♦=Connect, ♥=Adjacency, ♠=Containment, ↑=North, ↓=South
Impacto del proyecto Las contribuciones de este trabajo se centralizan en:
Formalizar una teoría para el análisis y síntesis semántica asociativa de datos espaciales. Considerando para esto, las propiedades y relaciones que describen el comportamiento intrínseco de los objetos geográficos.
Explotar una nueva línea de investigación, dedicada fundamentalmente a la correcta
representación e integración de los datos espaciales, y que pueda ser utilizada para diferentes casos de estudio por medio de descripciones semánticas basadas en una ontología espacial.
Integrar al área de la Geoinformática el empleo de técnicas de procesamiento
semántico a bases de datos geográficas para solucionar problemas de representación formal, integración, heterogeneidad e interoperabilidad entre datos espaciales.
19 Esta aseveración es solo considerada para el caso de estudio, ya que la descripción del mapa contiene todas las relaciones del mapa.

Generación de Ontologías Espaciales basándose en la Semántica de los Objetos Geográficos 16
Desarrollar un sistema prototipo que permita generar descripciones semánticas considerando una ontología espacial base para datos vectoriales.
Personalizar el acceso a las bases de datos geográficas digitales con grandes
volúmenes de datos, ya que este acceso no dependerá de una conceptualización particular del usuario o agente.
Consolidar una sólida directriz de investigación básica para el área de la
Geoinformática, la cual pueda ser reconocida a nivel nacional e internacional.