Apliaciones de Equilibro , CM y CG.
23
APLICACION DE LEYES DE EQUILIBRIO CENTRO DE GRAVEDAD ESTABILIDAD MECANICA PALANCAS BIOLOGICAS Joaquín Medin Molina FISI3011 CLASE14
description
apliaciones de equilibro
Transcript of Apliaciones de Equilibro , CM y CG.

APLICACION DE LEYES DEEQUILIBRIO
CENTRO DE GRAVEDADESTABILIDAD MECANICAPALANCAS BIOLOGICAS
Joaquín Medin MolinaFISI3011 CLASE14

CONCEPTO DE CENTRO DE GRAVEDAD(c.g)
c.g
c.g
W:peso de objeto
Centro de gravedad: Punto de aplicación de la fuerza de gravedad•El torque neto de la gravedad respecto al centro de gravedad es nulopor la definición del centro de gravedad.

DETERMINACION DEL CENTRO DE GRAVEDAD EN HUMANOEN POSICION RECTA
W
LEY DE EQUILIBRIO DE FUERZAS: W1 +W2 -W=0 o sea : W= W1 +W2
W1 W2L
X
LEY DE EQUILIBRIO DE TORQUESREFERIDA A cg:
L*WW
WX
00*W)XL(WX*W
0
21
2
21
WWW 21
++++====
====++++−−−−++++−−−−
====ττττ++++ττττ++++ττττ
cg
L-X
W
N2=72lbs
N1=78lbs
L=5 pies
X L-X
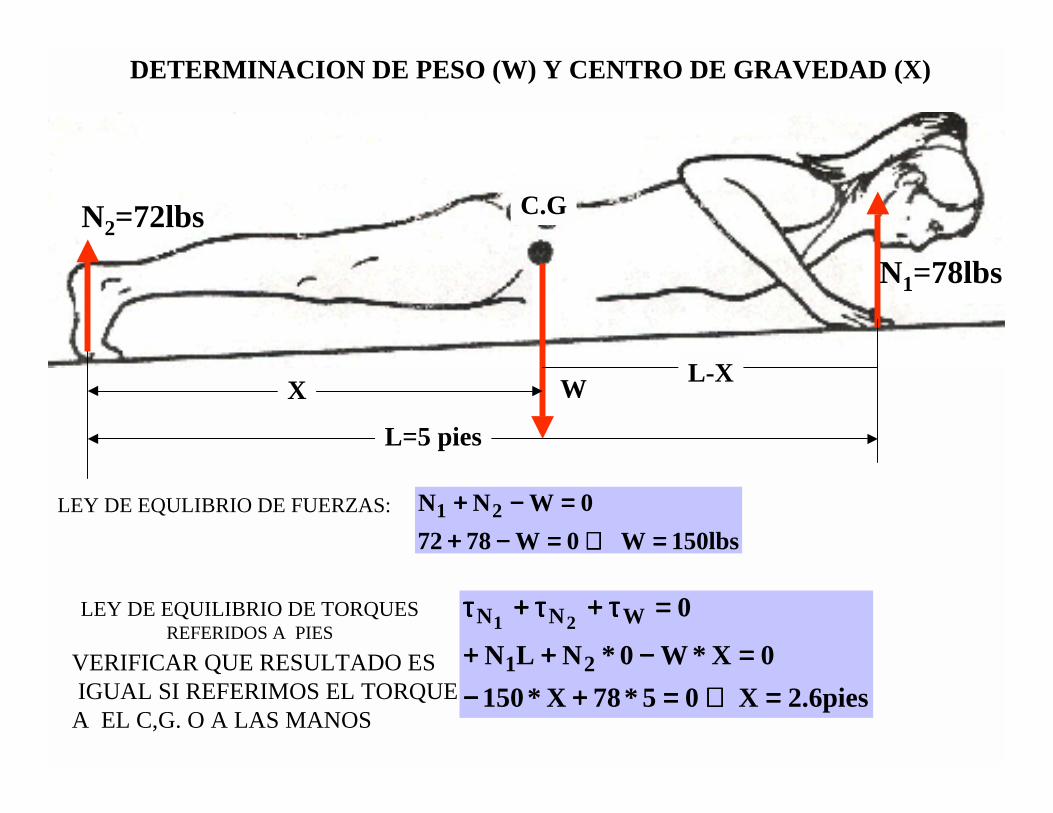
DETERMINACION DE PESO (W) Y CENTRO DE GRAVEDAD (X)
LEY DE EQULIBRIO DE FUERZAS:
150lbs W0W78720WNN 21
====⇒⇒⇒⇒====−−−−++++====−−−−++++
LEY DE EQUILIBRIO DE TORQUESREFERIDOS A PIES
C.G
2.6pies X05*78X*1500X*W0*NLN
0
21
WNN 21
====⇒⇒⇒⇒====++++−−−−====−−−−++++++++
====ττττ++++ττττ++++ττττ
VERIFICAR QUE RESULTADO ES IGUAL SI REFERIMOS EL TORQUEA EL C,G. O A LAS MANOS

DETERMINACION DEL CENTRO DE GRAVEDAD
CENTRODE GRAVEDAD
∑∑∑∑∑∑∑∑
∑∑∑∑∑∑∑∑
∑∑∑∑∑∑∑∑
∑∑∑∑∑∑∑∑
========
========
i
ii
i
iicg
i
ii
i
iicg
mYm
wYwY
mXm
wXwX
Y
XX
Y
mi y wi son la masa y el peso respectivos de la parte i del sistema

CENTRO DE GRAVEDAD: PUNTO DE INTERSECCION DELINEAS VERTICALES TRAZADAS AL SUSPENDER
LIBREMENTE UN CUERPO DESDE VARIOS PUNTOS
CG
W
En equlibrio el centro de gravedad se coloca en la vertical de modo quese pueda anular el torque debido a la gravedad
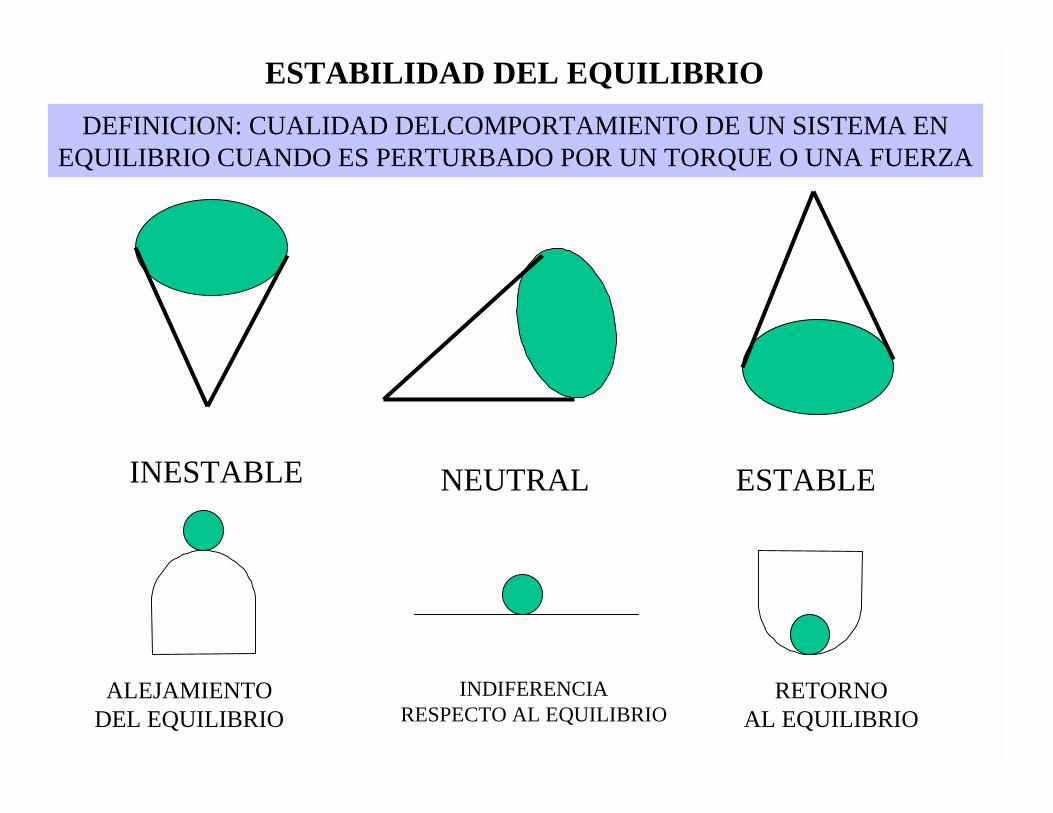
ESTABILIDAD DEL EQUILIBRIODEFINICION: CUALIDAD DELCOMPORTAMIENTO DE UN SISTEMA EN
EQUILIBRIO CUANDO ES PERTURBADO POR UN TORQUE O UNA FUERZA
INESTABLE ESTABLENEUTRAL
RETORNOAL EQUILIBRIO
ALEJAMIENTODEL EQUILIBRIO
INDIFERENCIARESPECTO AL EQUILIBRIO
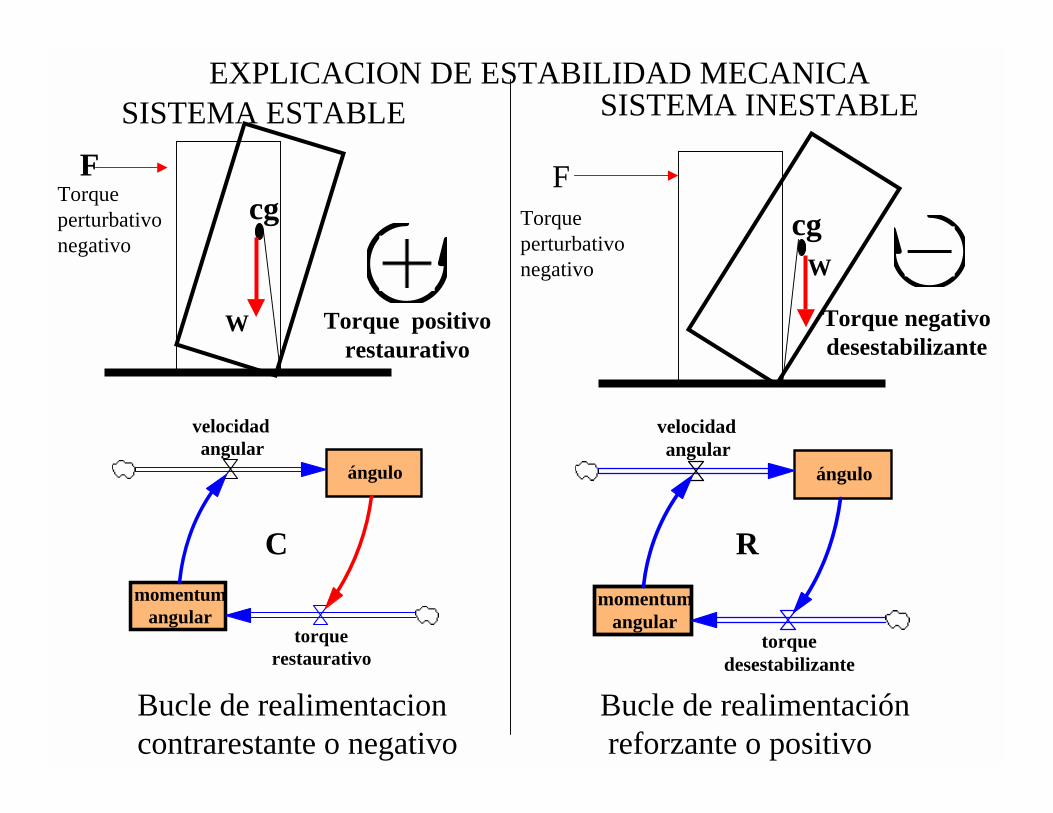
EXPLICACION DE ESTABILIDAD MECANICASISTEMA ESTABLE SISTEMA INESTABLE
W Torque positivorestaurativo
W
Torque negativodesestabilizante
ángulo
velocidadangular
momentumangular
torquerestaurativo
C
F FTorqueperturbativonegativo
Torqueperturbativonegativo
Bucle de realimentacioncontrarestante o negativo
ángulo
velocidadangular
momentumangular
torquedesestabilizante
R
Bucle de realimentación reforzante o positivo
cg cg

DETERMINACION DE ESTABILIDAD MECANICA PORCENTRO DE GRAVEDAD
REGLA 1 DE ESTABILIDAD: SI LA LINEA DE ACCION DE LA FUERZA DEGRAVEDAD INTERSECTA LA SUPERFICIE DE APOYO ENTONCES ELEQUILIBRIO ES ESTABLE, DE OTRA FORMA ES INESTABLE

ESTABILIDAD MECANICA Y CENTRO DE GRAVEDAD
ESTABLE INESTABLE
cg cg
w w
1
2
3
Intersecciones de linea de accióndel peso con la superficiede apoyo determinada por pies
1 y 3 son intersecciones inestables2 es intersección estable
Si la línea de acción del peso(w) se sale de la superficie de apoyodeterminada por los pies, perdemos la estabilidad mecánica

c.g.
ESTABILIDAD Y CENTRO DE GRAVEDAD
REGLA DE ESTABILIDAD 2: Si el centro de gravedad esta por debajo depunto de soporte, el equilibrio es estable pues cuando el sistema esperturbado el peso genera un torque que retaura el equilibrio
W

RESILIENCIA DEL EQUILIBRIO ESTABLE
LEY DE RESILIENCIA: Según aumenta la altura del centro degravedad el equilibrio se torna menos resiliente y por tanto massusceptible a ser desestabilizado
Resiliencia= grado de tolerancia a perturbaciones de un sistema estable
resilienteMenos resiliente
cg cg

ACTIVIDAD IMPOSIBLE: LEVANTARSE SIN INCLINAR CUERPOHACIA EL FRENTE O SIN MOVER PIES HACIA ATRAS
W

EXPERIMENTO ASIGNADO

PALANCAS•CINEMATICA: Barra rígida que puede girar en torno a un punto fijo(FULCRO ) localizado en ella.•DINAMICA: Barra rígida sometida a fuerzas que generan torques de signos opuestos•FUNCIONAL: Máquina que multiplica l a fuerza(ventaja mecánica),invierte la dirección deuna fiuerza, o multiplica la velocidad de un movimiento(ventaja cinemática)
función clases de palancas aumentar
velocidad cambiar la dirección
aumentar la fuerza
primera clase N en el medio
segunda clase R en el medio
tercera clase F en el medio
relacion entre brazos de las fuerzas
brazo de F<brazo de R
brazo de F=brazo de R
brazo de F>brazo de R
CLASIFICACION DE FUERZAS•F: fuerza(s) aplicada a palanca para que pueda realizar función útil
•R: fuerzas de resistencia que generan torque contrario a F•N: fuerza aplicada a palanca en el fulcro
F F F
F
R R R
R
R
F
F>R F=R F<R
ABRIDOR
ROMPENUECES
PALA

PRESENCIA DE LAS TRES CLASES DE PALANCAS EN EL CUERPO
F
FF
R R
R
F: FUERZA DE TENSION MUSCULARR: FUERZA DE CARGA DEBIDA AL PESO DE PARTESN: FUERZA SOBRE ARTICULACION DE HUESOS
CUERPO HUMANO= SISTEMA ARTICULADO DE PALANCAS
PALANCAS= HUESOS FULCROS= ARTICULACIONESVALOR MECANICO DE MUSCULOS : GENERADORES DE TORQUE

CONCEPTO DE VENTAJA DE PALANCAS
R
F
FRVM ====
SR
SF F
R
F
RLL
SSVC ========
LF LR
VENTAJAMECANICA
VENTAJACINEMATICA
•La VM nos dice cuantas veces la palanca aumenta la fuerza•La VC nos dice cuantas veces la palanca aumenta la velocidad•La VM es la recíproca de la VC.
PRUEBALEY DE EQUILIBRIO DE TORQUES
RESPECTO A FULCRO
VC1
FRVM
00*NL*RL*F0
RF
LLRF
NRF
============⇒⇒⇒⇒
====++++−−−−====ττττ++++ττττ++++ττττ
N

T=tensión de bicebs
N
W=10n0.03m
0.36m
•NUESTROS MUSCULOS SON MAS FUERTES DE LO QUE SUPONEMOS•LA EVOLUCION HA FAVORECIDO LA VENTAJA CINEMATICA SOBRE LA VENTAJA MECANICA
T-W-N=0EQUILIBRIO DE FUERZAS
EQUILIBRIODE TORQUESRESPECTO AL CODO
Wveces12n12010*03.36.T
036.*1003.*T0*N0WTN
============
====−−−−++++====ττττ++++ττττ++++ττττ
N=110n
PALANCA DE TIPO 3: PALANCA CORPORAL MAS FRECUENTE
VENTAJA MECANICA
083.012010
TWVM ============
VENTAJA CINEMATICA
1203.036.0VC ========

INDEPENDENCIA DE FUERZA MUSCULAR DE ANGULOEN ESTADO DE EQUILIBRIO
W=10n
T=70n T
W=10n
n705
35*Wº45Sen*5
º45Sen*35*WT
0º45Sen*35*Wº45Sen*5*T0WT
============
====−−−−====ττττ++++ττττ
Ley de equilibriode torques respecto
al codo
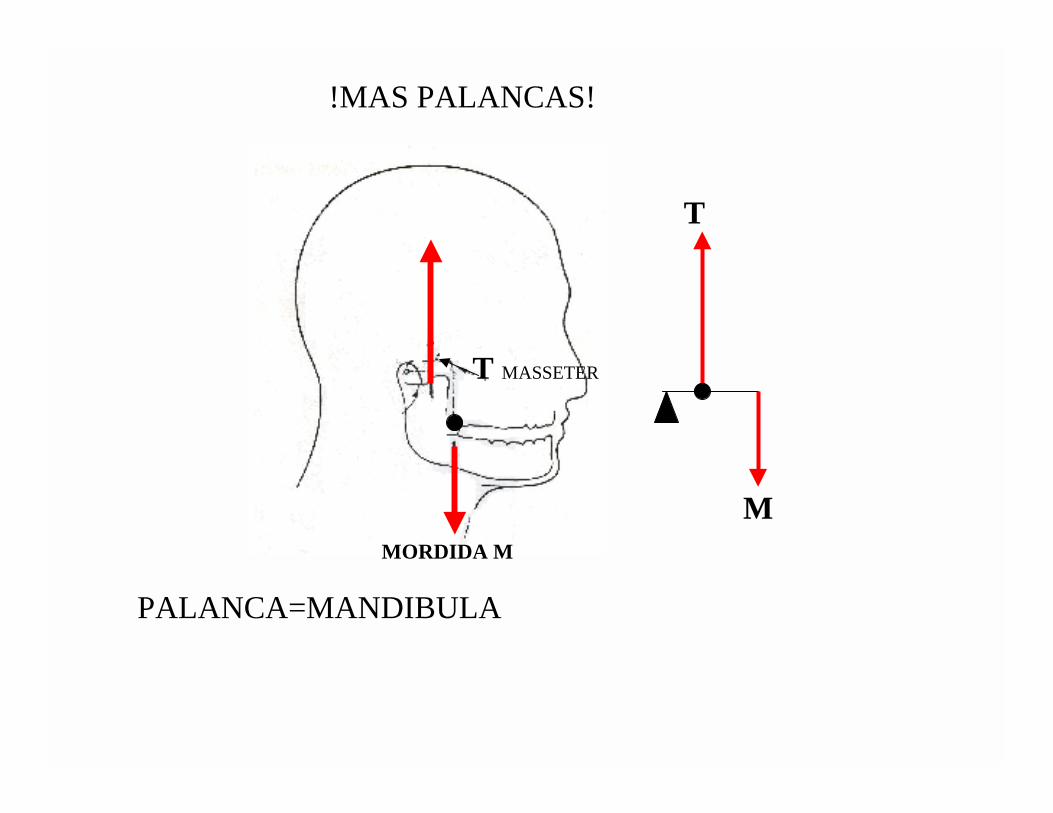
T MASSETER
MORDIDA M
T
M
PALANCA=MANDIBULA
!MAS PALANCAS!

F
cg
W=30lbs
¿QUE TIPO DE PALANCA HAY SE ILUSTRA EN LA FIGURA?
25º
30º.15cm.10cm
HALLAR LA VENTAJA MECANICA Y LA VENTAJA CINEMATICADE LA PALANCA ILUSTRADA

N
T
w
W
¿Que tipo de palanca se ilustra en la figura?
COMENTARIOS A MODO DE CONCLUSION
•El centro de gravedad es un punto tal que si sujetamos el cuerpo enreposo en ese punto el cuerpo esta y persite en equilibrio mecanico.
•El centro de gravedad determina la estabilidad mecánica de un cuerpo•Desde la perspectiva mecánica el cuerpo humano es un sistema
articulado de palancas de todas clases, aunque predominan las palancasde tipo3