APLICACIÓN DE EQUIPOS LÁSER 3D PARA EL … · Fig – 6 Instalación fija de anclajes y...
15
APLICACIÓN DE EQUIPOS LÁSER 3D PARA EL CONTROL CUALITATIVO Y CUANTITATIVO DE TÚNELES EN EJECUCIÓN Y REHABILITACIÓN. 1.- INTRODUCCIÓN La aplicación de modelos 3D en túneles permite obtener un elevado volumen de información, de la que se desprende el conocimiento en detalle de todos los aspectos geométricos de la obra realmente ejecutada o estado previo de rehabilitación. A diferencia de otros sistemas de medición los modelos 3D obtenidos con equipos Láser-Escáner 3D proporcionan un modelo numérico sin interrupciones, con una densidad de información próxima a la realidad absoluta. En túneles ejecutados con métodos no integrales, el sistema representa una alternativa real para el control de invasiones del terreno susceptibles de minorar los espesores de revestimiento siendo evidentes las ventajas sobre los métodos tradicionales. Por una parte, al tratarse de un método numérico, se evitan las deformaciones que se pueden producir en métodos mecánicos de control (carro de gálibo) que resultan difíciles de controlar. El conocimiento de incidencias en formato continuo y la velocidad de ejecución del proceso así como la fiabilidad de los datos obtenidos, justifican su aplicación en todo tipo de túneles. Los métodos de excavación integral por su parte necesitan el conocimiento de la disposición y forma final del anillo de dovelas sobre el teórico. La principal aplicación del sistema en estos casos, es el conocimiento de la posición absoluta de la estructura de sostenimiento respecto de ejes de vía o carriles de circulación. Con la información disponible se pueden plantear alternativas de trazado que sin variar notablemente los valores y parámetros de proyecto, permiten subsanar las desviaciones detectadas entre lo teórico y lo realmente ejecutado. En proyectos y obra de rehabilitación de túneles, se pone de manifiesto las ventajas de la utilización de sistemas 3D para valorar adecuadamente diferentes aspectos del método constructivo y de las mediciones previas al comienzo de obra, para adaptar el túnel existente a las nuevas situaciones y exigencia de gálibo. 2.- TEORÍA GENERAL BÁSICA El propósito de un equipo de medición 3D escáner es crear una nube de referencias numéricas de cualquier superficie objeto, y dependiendo del modelo utilizado los datos obtenidos corresponden a los valores de un sistema de coordenadas local, pixelado (imagen) de la superficie y valor de intensidad de señal. Por norma general, un modelo completo del objeto no se consigue mediante una única posición de los equipos 3D, fundamentalmente debido al alcance en distancia y condicionado por el ángulo de incidencia de la señal sobre el objeto a representar. Estos factores hacen necesario establecer una metodología adecuada a cada situación,
-
Upload
phungduong -
Category
Documents
-
view
213 -
download
0
Transcript of APLICACIÓN DE EQUIPOS LÁSER 3D PARA EL … · Fig – 6 Instalación fija de anclajes y...

APLICACIÓN DE EQUIPOS LÁSER 3D PARA EL CONTROL CUALITATIVO Y CUANTITATIVO DE TÚNELES EN EJECUCIÓN Y REHABILITACIÓN. 1.- INTRODUCCIÓN La aplicación de modelos 3D en túneles permite obtener un elevado volumen de información, de la que se desprende el conocimiento en detalle de todos los aspectos geométricos de la obra realmente ejecutada o estado previo de rehabilitación. A diferencia de otros sistemas de medición los modelos 3D obtenidos con equipos Láser-Escáner 3D proporcionan un modelo numérico sin interrupciones, con una densidad de información próxima a la realidad absoluta. En túneles ejecutados con métodos no integrales, el sistema representa una alternativa real para el control de invasiones del terreno susceptibles de minorar los espesores de revestimiento siendo evidentes las ventajas sobre los métodos tradicionales. Por una parte, al tratarse de un método numérico, se evitan las deformaciones que se pueden producir en métodos mecánicos de control (carro de gálibo) que resultan difíciles de controlar. El conocimiento de incidencias en formato continuo y la velocidad de ejecución del proceso así como la fiabilidad de los datos obtenidos, justifican su aplicación en todo tipo de túneles. Los métodos de excavación integral por su parte necesitan el conocimiento de la disposición y forma final del anillo de dovelas sobre el teórico. La principal aplicación del sistema en estos casos, es el conocimiento de la posición absoluta de la estructura de sostenimiento respecto de ejes de vía o carriles de circulación. Con la información disponible se pueden plantear alternativas de trazado que sin variar notablemente los valores y parámetros de proyecto, permiten subsanar las desviaciones detectadas entre lo teórico y lo realmente ejecutado. En proyectos y obra de rehabilitación de túneles, se pone de manifiesto las ventajas de la utilización de sistemas 3D para valorar adecuadamente diferentes aspectos del método constructivo y de las mediciones previas al comienzo de obra, para adaptar el túnel existente a las nuevas situaciones y exigencia de gálibo. 2.- TEORÍA GENERAL BÁSICA El propósito de un equipo de medición 3D escáner es crear una nube de referencias numéricas de cualquier superficie objeto, y dependiendo del modelo utilizado los datos obtenidos corresponden a los valores de un sistema de coordenadas local, pixelado (imagen) de la superficie y valor de intensidad de señal. Por norma general, un modelo completo del objeto no se consigue mediante una única posición de los equipos 3D, fundamentalmente debido al alcance en distancia y condicionado por el ángulo de incidencia de la señal sobre el objeto a representar. Estos factores hacen necesario establecer una metodología adecuada a cada situación,
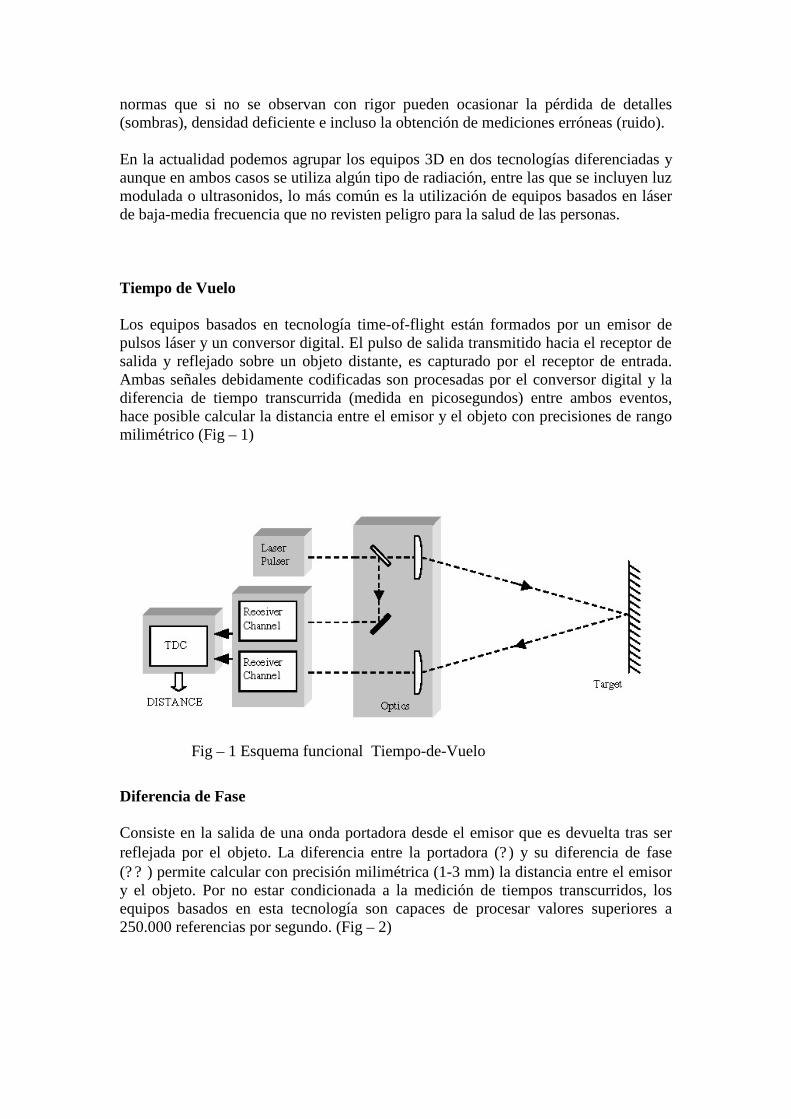
normas que si no se observan con rigor pueden ocasionar la pérdida de detalles (sombras), densidad deficiente e incluso la obtención de mediciones erróneas (ruido). En la actualidad podemos agrupar los equipos 3D en dos tecnologías diferenciadas y aunque en ambos casos se utiliza algún tipo de radiación, entre las que se incluyen luz modulada o ultrasonidos, lo más común es la utilización de equipos basados en láser de baja-media frecuencia que no revisten peligro para la salud de las personas. Tiempo de Vuelo Los equipos basados en tecnología time-of-flight están formados por un emisor de pulsos láser y un conversor digital. El pulso de salida transmitido hacia el receptor de salida y reflejado sobre un objeto distante, es capturado por el receptor de entrada. Ambas señales debidamente codificadas son procesadas por el conversor digital y la diferencia de tiempo transcurrida (medida en picosegundos) entre ambos eventos, hace posible calcular la distancia entre el emisor y el objeto con precisiones de rango milimétrico (Fig – 1)
Diferencia de Fase Consiste en la salida de una onda portadora desde el emisor que es devuelta tras ser reflejada por el objeto. La diferencia entre la portadora (? ) y su diferencia de fase (? ? ) permite calcular con precisión milimétrica (1-3 mm) la distancia entre el emisor y el objeto. Por no estar condicionada a la medición de tiempos transcurridos, los equipos basados en esta tecnología son capaces de procesar valores superiores a 250.000 referencias por segundo. (Fig – 2)
Fig – 1 Esquema funcional Tiempo-de-Vuelo

Los sistemas de medición, independientemente de la técnica empleada, solamente son capaces de calcular la distancia a un único objeto; por esta razón los equipos láser-escáner 3D incorporan un sistema auxiliar de espejos y servo-motores que hacen posible el desplazamiento angular de las señales a lo largo del modelo objeto, en modo planar(raster) o esférico. En todo caso la capacidad de adquirir información es sorprendente, variando entre un rango de 5.000-100.000 referencias por segundo para los equipos basados en tiempo-de-vuelo, y superiores a 250.000 en diferencia de fase. El paso angular de giro o desplazamiento del sistema de espejos se puede configurar mediante el software de sistema proporcionado por cada fabricante, haciendo posible ajustar la densidad de referencias deseada. Lamentablemente la medida angular se mantiene constante en todo el proceso de medición, característica que provoca que la malla obtenida no resulte uniforme, distanciándose los nodos entre si mismos a medida que el objeto se aleja del foco emisor. Por otra parte los equipos 3D no pueden considerarse un equipo topográfico y por lo tanto no disponen de mecanismo alguno que les permita obtener una posición absoluta, tomando siempre como origen de coordenadas el foco emisor del equipo. Todo ello obliga a establecer un método que garantice el éxito de cualquier estudio en el que se utilice esta tecnología.
Fig – 2 Esquema funcional Diferencia-de-Fase
Escáner FARO LS HE880 de diferencia de fase y detalle del reflector rotatorio

3.- METODOLOGÍA El uso de sistemas 3D en túneles y obras subterráneas implica necesariamente la implantación de un método adecuado de trabajo. Por norma general cualquier proceso en el que se emplee técnicas láser-escáner 3D se divide en tres fases diferenciadas.
? Captura de datos (trabajo de campo) ? Registro y orientación de modelos ? Explotación numérica y gráfica de los datos
En cada una de las etapas enumeradas, los equipos utilizados y el personal técnico que interviene en los procesos es importante; no obstante los trabajos de campo adquieren una mayor relevancia en cuanto a la observación de las recomendaciones y rigurosidad de método. Captura de Datos El inicio de los trabajos de campo suele coincidir –aunque no necesariamente- con la fase final de excavación del túnel, momento en el que la obra reúne las condiciones óptimas para ello: mínimo tráfico de maquinaria y vehículos pesados, ausencia de instalaciones auxiliares y atmósfera con baja densidad de partículas en suspensión. Seleccionada la instrumentación se deben planificar sus posicionamientos para alcanzar la densidad de datos exigida. Este es un aspecto que debe tratarse con sumo rigor para evitar diferencias notables en la malla y sobre todo para proteger el modelo de oclusiones y zonas de sombra producidas por la propia irregularidad del terreno (Excavaciones no integrales). Todos los equipos de medición tridimensional, independientemente de sus características específicas, realizan el barrido ajustándose a un intervalo angular fijo establecido que condiciona irremediablemente la dispersión de la malla a medida que el objeto se aleja, lo que supone que la nube de puntos no se consiga de acuerdo a una cuadrícula regular y homogénea. (Fig-3)
Fig – 3 Dispersión de malla

Por ésta y otras razones, la separación máxima entre estaciones ha de establecerse de acuerdo a los parámetros que la condicionan: Densidad exigida, radio de túnel y rugosidad. El radio de la sección ejecutada influye notablemente en la velocidad en la que disminuye la densidad de malla a medida que aumenta la distancia al objeto. La figura 4 muestra la relación existente entre (radio-densidad de malla)->separación de estaciones instrumentales.
Fig – 4 Distancias recomendadas según el radio de excavación
Fig – 5 Recomendaciones específicas en zonas de refuerzo (cerchas)
De la gráfica (Fig – 4) podemos obtener la distancia recomendada entre estaciones contiguas para conseguir una densidad de modelo de las proporciones deseadas. Por norma general, para la inmensa mayoría de túneles (6-7 m.), la distancia apropiada para alcanzar una malla de 0.05 x 0.05 (escenario ideal), oscila entre 23-24 m. Y no debe superar esta medida salvo razones plenamente justificadas. La rugosidad de la excavación es un factor importante a tener en cuenta para ajustar este parámetro. Si la superficie del terreno presenta irregularidades importantes será necesario disminuir la distancia recomendada. La propia irregularidad del terreno hace difícil establecer normas que se cumplan en todo momento, y la experiencia y buenas prácticas del equipo técnico responsable de la toma de datos, será la encargada de aplicar la correcciones necesarias en cada situación concreta. En todo caso, ante terrenos muy irregulares, conviene establecer reducciones de 10%-20% . Los tramos de obra en los que la sección de sostenimiento incluye cerchas, son claros candidatos a la generación de sombras en las simas que se producen entre dos anillos contiguos. El gráfico de la figura 3 representa los valores máximos de separación entre estaciones en función de radios y profundidades de sima (Fig – 5). Apoyo Topográfico Anteriormente se ha hecho referencia a la imposibilidad de los equipos láser-escáner 3D para obtener una posición absoluta de coordenadas, y como consecuencia es necesario e imprescindible establecer un sistema de apoyo topográfico que proporcione un sistema de coordenadas de obra, referencias que serán utilizadas para registrar y orientar los diferentes modelos 3D.
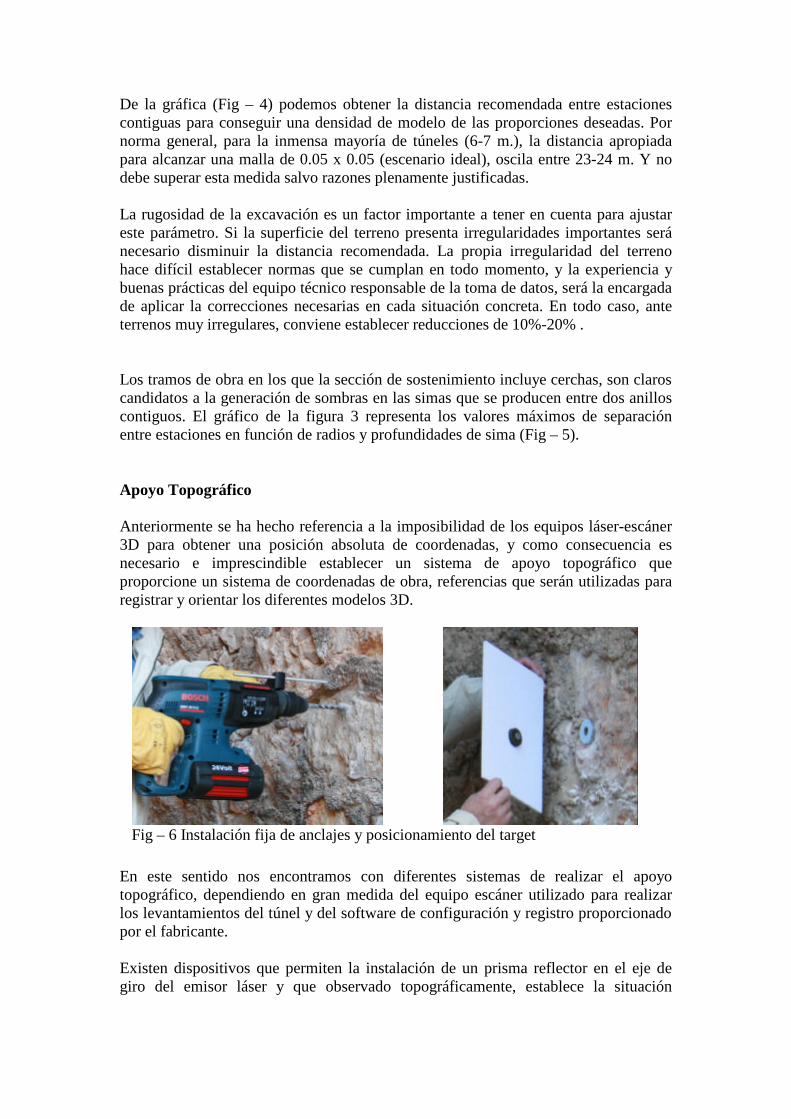
En este sentido nos encontramos con diferentes sistemas de realizar el apoyo topográfico, dependiendo en gran medida del equipo escáner utilizado para realizar los levantamientos del túnel y del software de configuración y registro proporcionado por el fabricante. Existen dispositivos que permiten la instalación de un prisma reflector en el eje de giro del emisor láser y que observado topográficamente, establece la situación
Fig – 6 Instalación fija de anclajes y posicionamiento del target
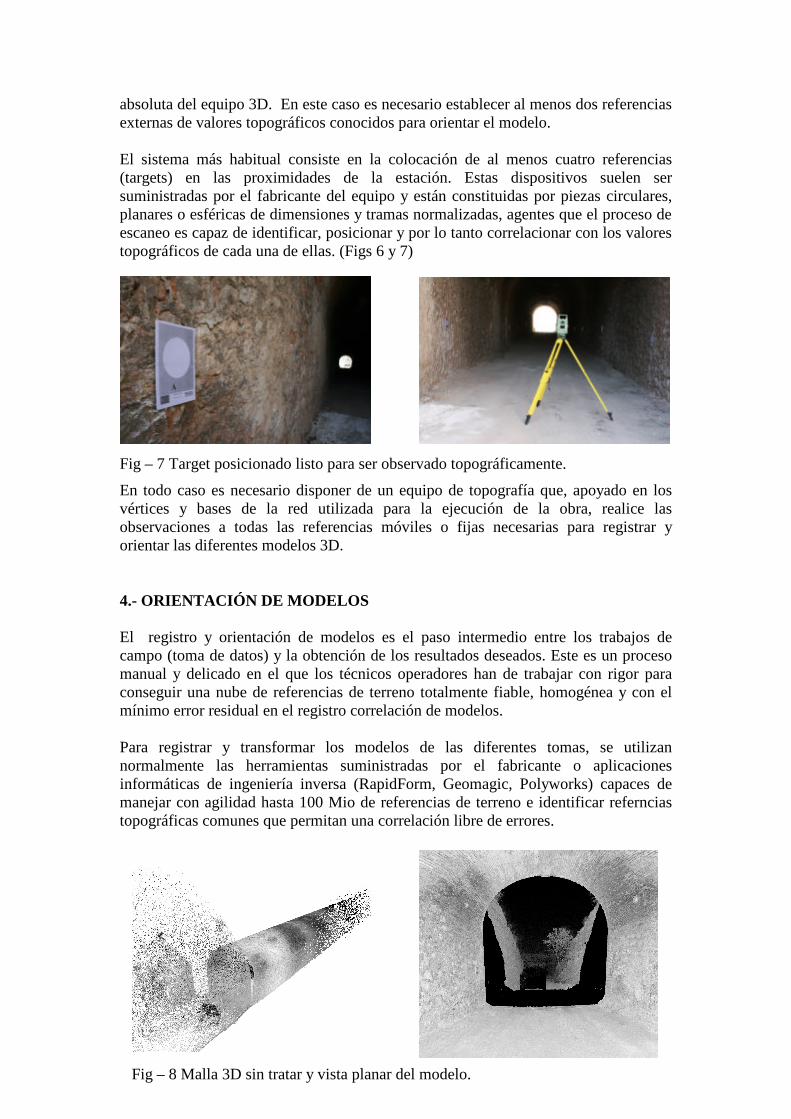
absoluta del equipo 3D. En este caso es necesario establecer al menos dos referencias externas de valores topográficos conocidos para orientar el modelo. El sistema más habitual consiste en la colocación de al menos cuatro referencias (targets) en las proximidades de la estación. Estas dispositivos suelen ser suministradas por el fabricante del equipo y están constituidas por piezas circulares, planares o esféricas de dimensiones y tramas normalizadas, agentes que el proceso de escaneo es capaz de identificar, posicionar y por lo tanto correlacionar con los valores topográficos de cada una de ellas. (Figs 6 y 7)
En todo caso es necesario disponer de un equipo de topografía que, apoyado en los vértices y bases de la red utilizada para la ejecución de la obra, realice las observaciones a todas las referencias móviles o fijas necesarias para registrar y orientar las diferentes modelos 3D. 4.- ORIENTACIÓN DE MODELOS El registro y orientación de modelos es el paso intermedio entre los trabajos de campo (toma de datos) y la obtención de los resultados deseados. Este es un proceso manual y delicado en el que los técnicos operadores han de trabajar con rigor para conseguir una nube de referencias de terreno totalmente fiable, homogénea y con el mínimo error residual en el registro correlación de modelos. Para registrar y transformar los modelos de las diferentes tomas, se utilizan normalmente las herramientas suministradas por el fabricante o aplicaciones informáticas de ingeniería inversa (RapidForm, Geomagic, Polyworks) capaces de manejar con agilidad hasta 100 Mio de referencias de terreno e identificar referncias topográficas comunes que permitan una correlación libre de errores.
Fig – 7 Target posicionado listo para ser observado topográficamente.
Fig – 8 Malla 3D sin tratar y vista planar del modelo.

Sobre el modelo 3D así procesado es aconsejable realizar una limpieza de objetos no deseados y que no representan el terreno (Tuberías, mangueras, maquinaria) salvo que se prefiera omitir en esta fase y delegarla al proceso de explotación si se disponen de las aplicaciones especificas de control geométrico de túneles. El resultado final es un modelo numérico con varios millones de referencias x,y,z del terreno. Para hacerse una idea aproximada, un kilómetro de túnel puede contener una media de 20 Mio de referencias. En la Fig-8 podemos observar una nube de puntos sin procesar. Sobre ella se aprecia la dispersión de malla como consecuencia de la separación del objeto respecto del foco emisor y el valor de paso angular. Nótese en la imagen planar la representación de taludes de emboquille y la sombra producida por la propia sección del túnel. En la Fig-p vemos el mismo modelo ya depurado , registrado y unido a múltiples tomas, formando un único objeto continuo y apoyado en los datos topográficos de obra
Fig – 9 Múltiples modelos registrados y orientados.
5.- EXPLOTACIÓN DEL MODELO. Por último es necesario obtener información tratable para la valoración pormenorizada de la obra existente desde todos los enfoques posibles, información que permite tomar decisiones apoyadas en la realidad para la resolución de incidencias detectadas y ajuste de las unidades pendientes de ejecutar, así como valorar las producidas hasta el momento de los trabajos de campo. Para procesar los datos registrados y orientados como se indica en el apartado anterior y confeccionar informes de los resultados obtenidos, es necesario disponer de los elementos y herramientas de proceso numérico adecuadas que se encarguen de convertir los datos existentes en información manejable. El software a emplear debe disponer como mínimo de utilidades para definir datos básicos del proyecto como son estado de alineaciones, geometría de sección tipo y sus peraltes y naturalmente ha de ser capaz de procesar en formato continuo y con agilidad la totalidad de los datos obtenidos en obra, datos que suelen alcanzar en la mayoría de los casos cientos de millones de ítems. Los estudios e informes realizados hasta el momento ponen de manifiesto las necesidades para realizar un adecuado seguimiento de incidencias y control de la obra realmente ejecutada. Los resultados obtenidos se resumen en los siguientes apartados: Gálibo virtual En toda excavación realizada con métodos no integrales se producen irremediablemente desviaciones respecto de la sección teórica de proyecto, rebasando o invadiendo la línea de excavación teórica. En aquellos casos en los que se contempla el revestimiento del túnel como unidad de obra a ejecutar, la excavación por defecto puede suponer una disminución de los espesores de revestimiento respecto de los reflejados en proyecto, y en algunos casos puede dificultar el posicionamiento de los elementos de encofrado.
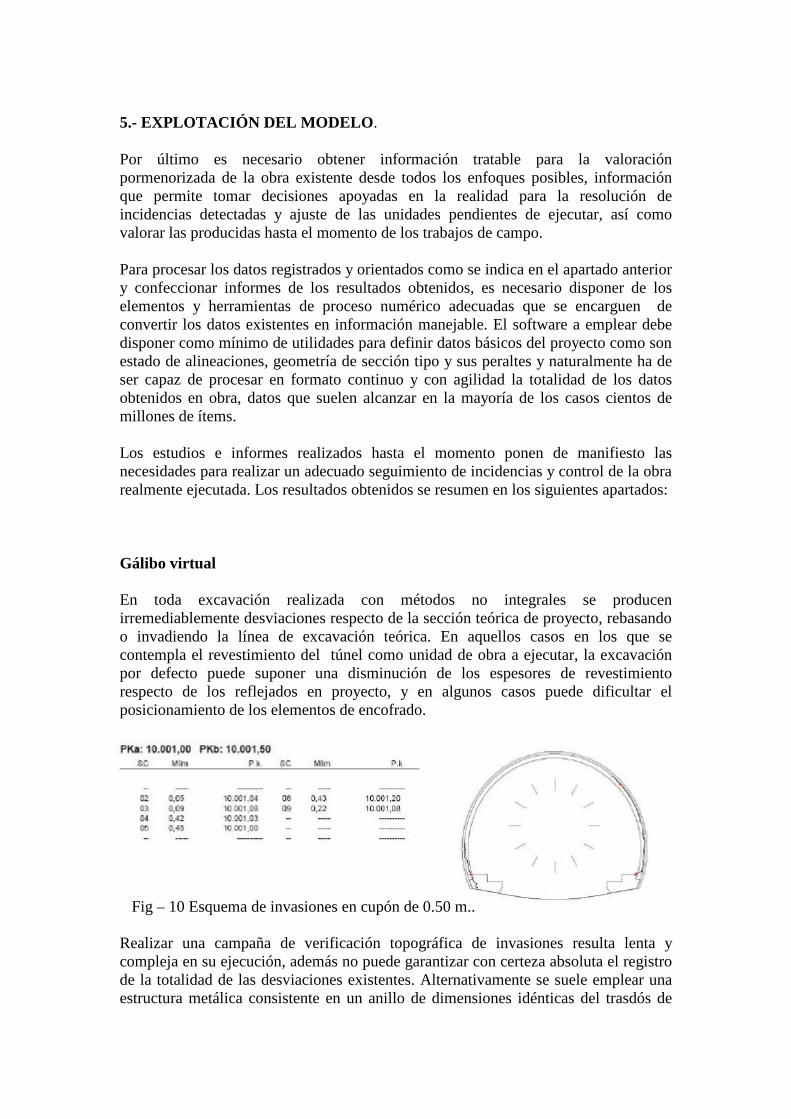
Realizar una campaña de verificación topográfica de invasiones resulta lenta y compleja en su ejecución, además no puede garantizar con certeza absoluta el registro de la totalidad de las desviaciones existentes. Alternativamente se suele emplear una estructura metálica consistente en un anillo de dimensiones idénticas del trasdós de
Fig – 10 Esquema de invasiones en cupón de 0.50 m..

encofrado, al que se le añaden a lo largo de su desarrollo unas varillas palpadoras que cubren el espesor de revestimiento y son las encargadas de detectar colisiones con el sostenimiento existente. Al disponer de un modelo 3D del terreno debidamente tratado y con la garantía de que la malla de terreno obtenida tiene la densidad suficiente, el proceso de cálculo de comprobación de gálibo simula numéricamente el paso de las secciones teóricas aplicables en cada caso concreto, analizando todos los vértices y planos del modelo 3D y recogiendo en un informe los datos de aquellas regiones que invaden la sección mínima definida en cada sección tipo. Los resultados obtenidos aventajan notablemente a los sistemas habituales de comprobación de la excavación por medios mecánicos o topográficos, proporcionando un conocimiento de todas las incidencias existentes en un único proceso y en la totalidad de la obra (Fig – 9).
Lógicamente los resultados se deben representar de forma esquemática, recogiendo aquellos puntos de máxima invasión que se producen en tramos de túnel relativamente pequeños, de lo contrario la información obtenida sería difícil de manejar e interpretar por el usuario, por no decir intratable. En las figuras 10 y 11 podemos ver el grado de invasión (tramado) en un tramo de túnel, su equivalente en representación esquemática y los datos numéricos de replanteo de máxima invasión. La ventaja más evidente de aplicar este sistema es la rapidez con la que se obtienen resultados de forma global, lo que permite iniciar de forma inmediata las labores necesarias para corregir las invasiones existentes, incluso en diferentes tramos de la obra simultáneamente. Por otra parte evita la necesidad de diseñar y construir un carro para verificar el gálibo de la obra ejecutada y su transporte a lo largo del túnel. Desprendimientos En la mayoría de los casos en túneles excavados con métodos no integrales se producen, como consecuencia de desprendimientos espontáneos tras la voladura, sobrexcavaciones inevitables y difíciles de preveer a pesar de seguir una buena praxis constructiva.
Fig – 11 Cupón de túnel procesado y listado de datos de replanteo de invasiones.
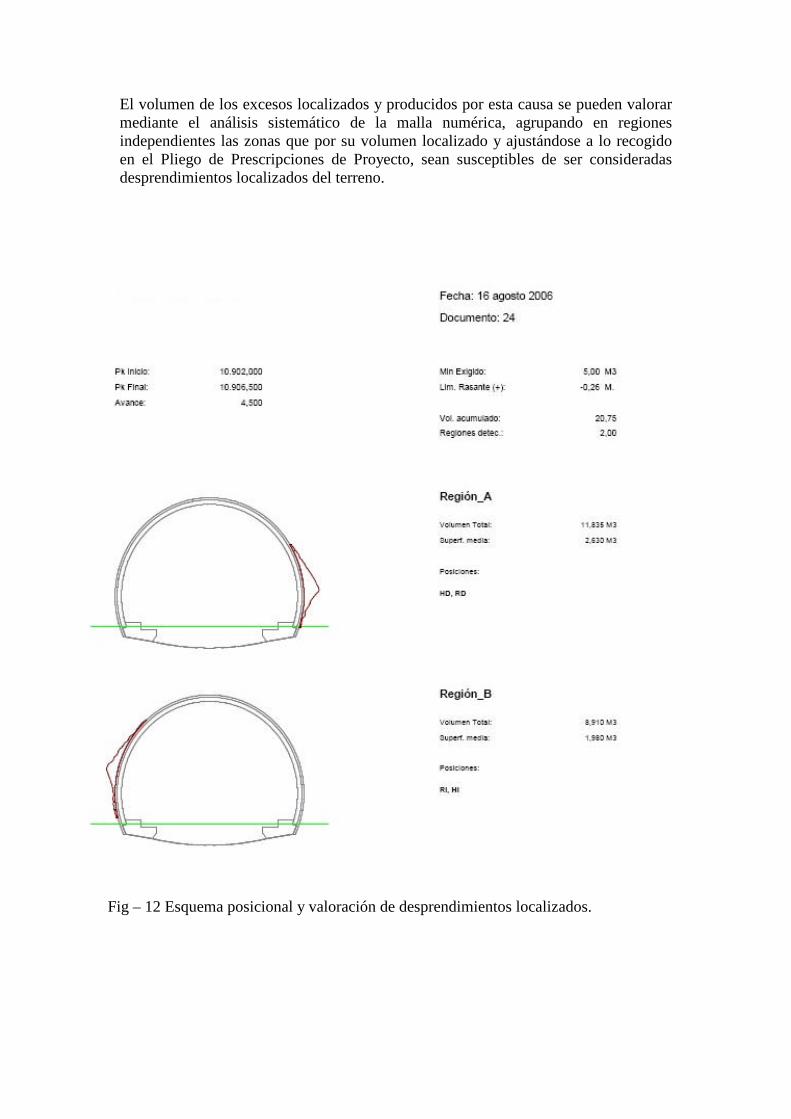
El volumen de los excesos localizados y producidos por esta causa se pueden valorar mediante el análisis sistemático de la malla numérica, agrupando en regiones independientes las zonas que por su volumen localizado y ajustándose a lo recogido en el Pliego de Prescripciones de Proyecto, sean susceptibles de ser consideradas desprendimientos localizados del terreno.
Fig – 12 Esquema posicional y valoración de desprendimientos localizados.

Mediciones Como no puede ser de otra forma el volumen de datos obtenidos en un proceso láser-escáner, permite obtener un cálculo de mediciones más preciso y de mayor contenido que con cualquier otro sistema conocido. Normalmente este proceso se realiza apoyándonos en perfiles transversales del terreno existente, y en el caso que nos ocupa es posible obtener secciones del terreno muy próximas entre si y con un grado de representación del terreno muy elevado, alcanzando una precisión de mediciones muy próxima a la realidad. Para que resulte posible obtener las mediciones deseadas, el software empleado debe tener las herramientas y utilidades necesarias para aislar diferentes zonas del perfil y formular los cálculos necesarios que actúan sobre éstas. Dicho de otra forma, el proceso de cálculo requiere de una versatilidad capaz de obtener mediciones de unidades de ejecución concretas, por ejemplo volúmenes de hormigón diferenciados entre zona de aceras y bóveda, superficies localizadas entre acotaciones, perímetros de las zonas excavadas por exceso y defecto etcétera. Desviaciones de trayectoria Ocasionalmente se producen desviaciones en la ejecución de la excavación respecto al estado de alineaciones de proyecto, siendo éstas causadas por desviaciones de trayectoria en los equipos de perforación, siendo más acusadas si cabe cuando se utilizan métodos integrales en la ejecución del túnel.
Fig – 13 Análisis de desviaciones de trazado .

Con los datos procedentes del túnel y la densidad de éstos es posible realizar una comparación exhaustiva entre la sección de proyecto y lo realmente ejecutado (Fig – 13), consiguiendo una tabla de desviaciones mediante las cuales es posible acometer estudios de diferentes variantes de trazado basados en la situación existente, que pueden mejorar sustancialmente la posición absoluta de la obra existente sobre la sección de proyecto. Incluso es posible simular el paso de figuras geométricas que representan unidades y maquinaria de obra que permiten verificar aspectos tales como tolerancia de catenaria, contacto entre elementos del sostenimiento existente y equipos de construcción En la Fig-14 se observa la posición absoluta del terreno respecto de la sección teórica aplicando datos de proyecto, y el resultado comparativo de aplicar una determinada variante de trazado.
Fig – 14 Simulación alternativa de estado de alineaciones.

Perfiles transversales Seccionamiento sistemático del modelo en el intervalo deseado para la obtención de perfiles transversales del terreno que permiten verificar y justifican cualquier informe emitido.
5.- APLICACIONES ? Estudios e informes AS-BUILT de obra realmente existente en la que se
incluye la comprobación de gálibo, desprendimientos, mediciones y perfiles transversales.
? Verificación puntual de sección en tramos de refuerzo o convergencias de
magnitud notable. ? Medición de grandes cavidades y colapsos.
? Comprobación de emboquilles previos (Tuneladoras)
? Análisis de desviaciones del trazado y ajuste de variantes
? Inventario numérico.

7. – CONCLUSIONES Los sistemas y métodos descritos se apoyan en la experiencia de los trabajos realizados en las obras de túnel más relevantes a nivel nacional, tanto a nivel de AS-BUILT en obras de nueva factura, controles puntuales durante la ejecución y rehabilitación de túneles en servicio. Del contenido del presente artículo se desprende que el establecimiento de control geométrico y cuantitativo mediante sistemas Láser-Escáner 3D, supone una ventaja respecto a otros métodos empleados, sobre todo si atendemos a la velocidad de captura de la información y obtención de resultados inmediatos. Es interesante observar el grado de implantación de sistemas 3D en otros países de la Comunidad Europea para el control de obras subterráneas; así se pudo comprobar en las ponencias a cargo de los catedráticos de la Universidad de Graz (Austria) D. Wulf Schubert y D. Klaus Rabensteiner en las Jornadas Técnicas que tuvieron lugar el pasado mes de marzo de 2.007 en la Fundación Gómez Pardo, a las que tuvimos la ocasión de asistir y tomar buena nota de su aplicación en otras áreas tales como explotación de minas y canteras, arquitectura, documentación de patrimonio, industria naval etcétera.