Barba & alvarez elemento shell
67
MODULO DE COMPUTACION APLICADA FACULTAD D E INGENIE RÍA CIVIL Y MECÁNI CA ÁLVAREZ PAULA BARBA DIEGO 10 «C»
Transcript of Barba & alvarez elemento shell

MODULO D
E
COMPUTA
CION A
PLIC
ADA
FACULT
AD DE IN
GENIERÍA
CIV
IL Y
MECÁNICA
ÁLVAREZ PAULA BARBA DIEGO
10 «C»
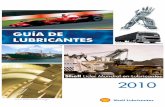
EL ELEMENTO SHELL Se utiliza :
temas
Temas básicos para todos los usuarios
• Visión general• Conectividad Conjunto• Grados de Libertad• Sistema de Coordenadas Local• Propiedades de la sección• Masa• Auto-Peso de la carga• Carga uniforme• Salida de la Fuerza Interna y el Estrés

Temas avanzados:
• Avanzar Sistema de Coordenadas Local• La gravedad de carga• Superficie de carga de presión• Temperatura de carga

Overview (Información general)
El elemento de Shell es una formulación de tres o cuatro nodos que combina separadomembrana y el comportamiento de flexión de la placa.
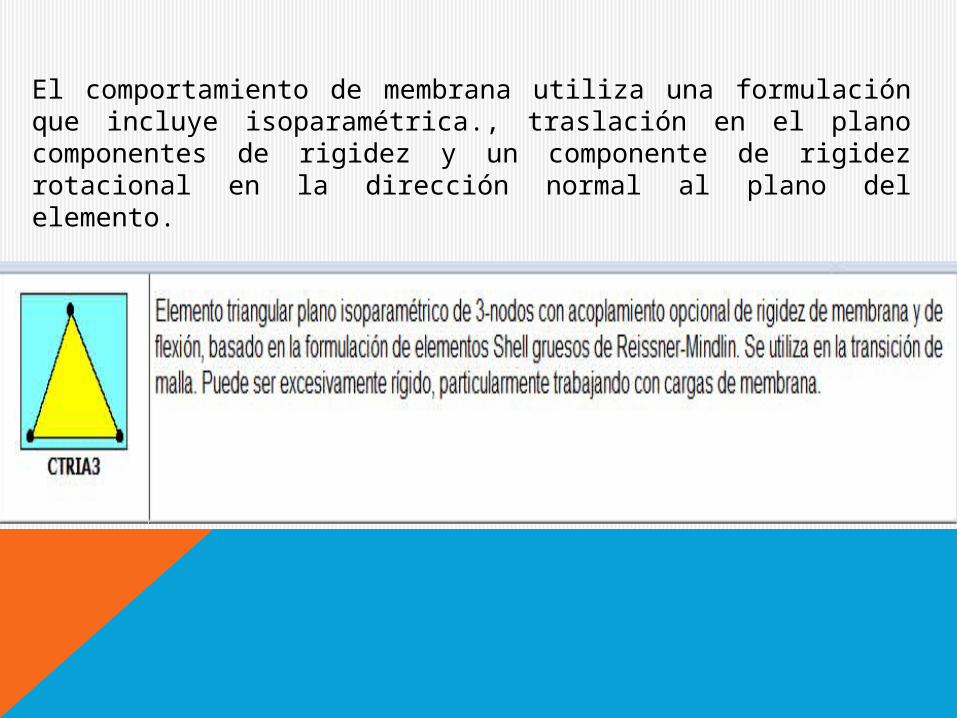
El comportamiento de membrana utiliza una formulación que incluye isoparamétrica., traslación en el plano componentes de rigidez y un componente de rigidez rotacional en la dirección normal al plano del elemento.
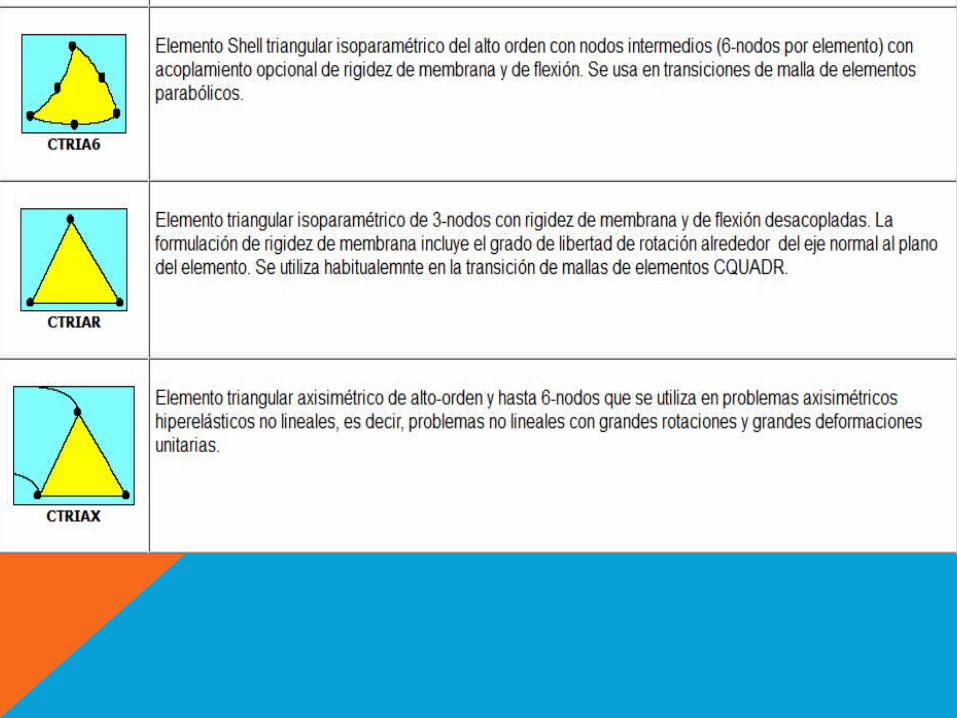
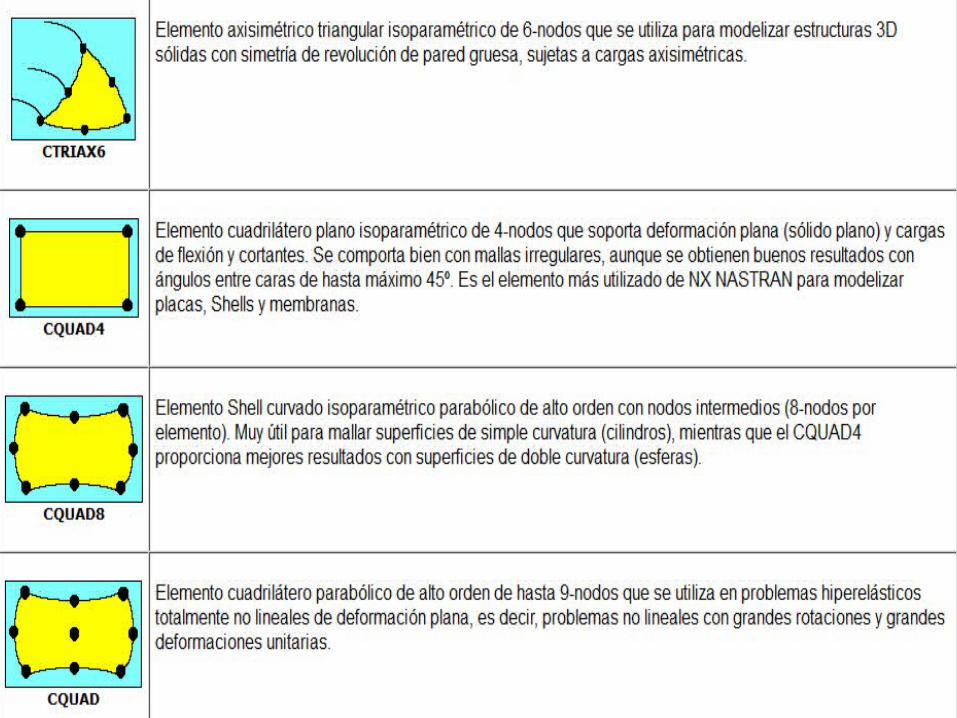
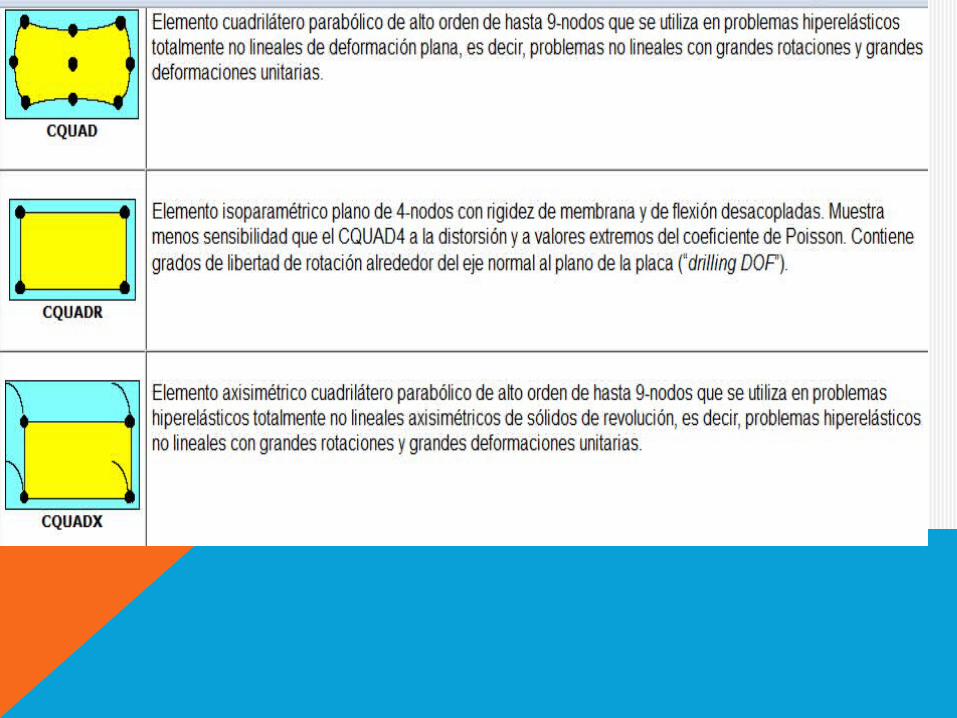

Todos estos elementos difieren principalmente en su topología, en el nº de nodos, y en el nº de puntos internos de cálculo de tensiones. Se pueden utilizar para modelizar membranas, placas y elementos Shell finos y gruesos. Lo más importante es saber utilizar el elemento más adecuado en todo momento para maximizar la precisión del análisis.
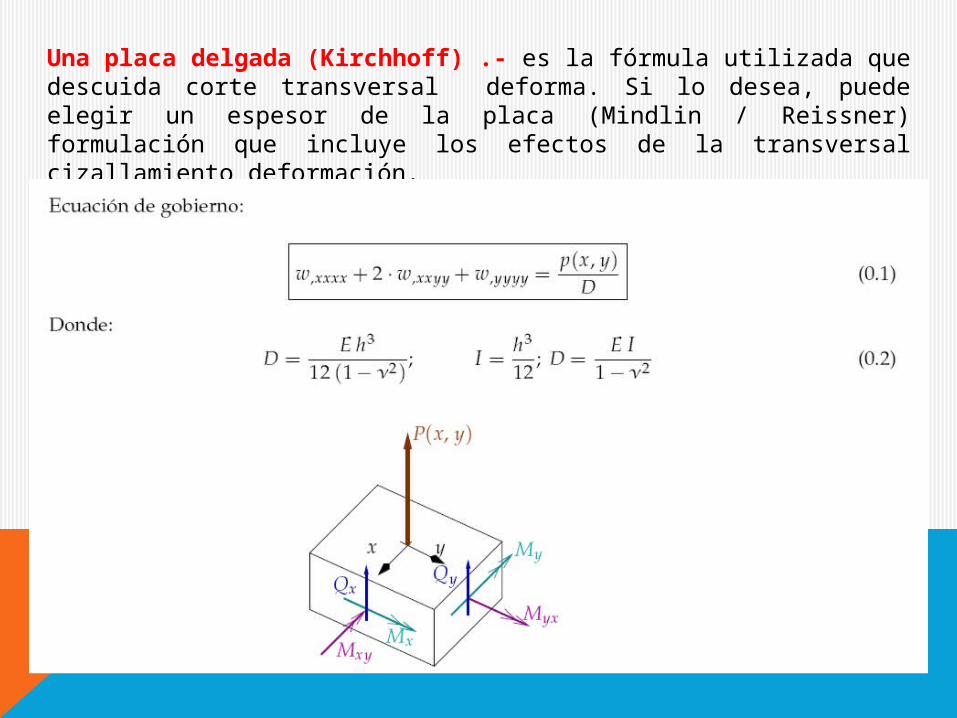
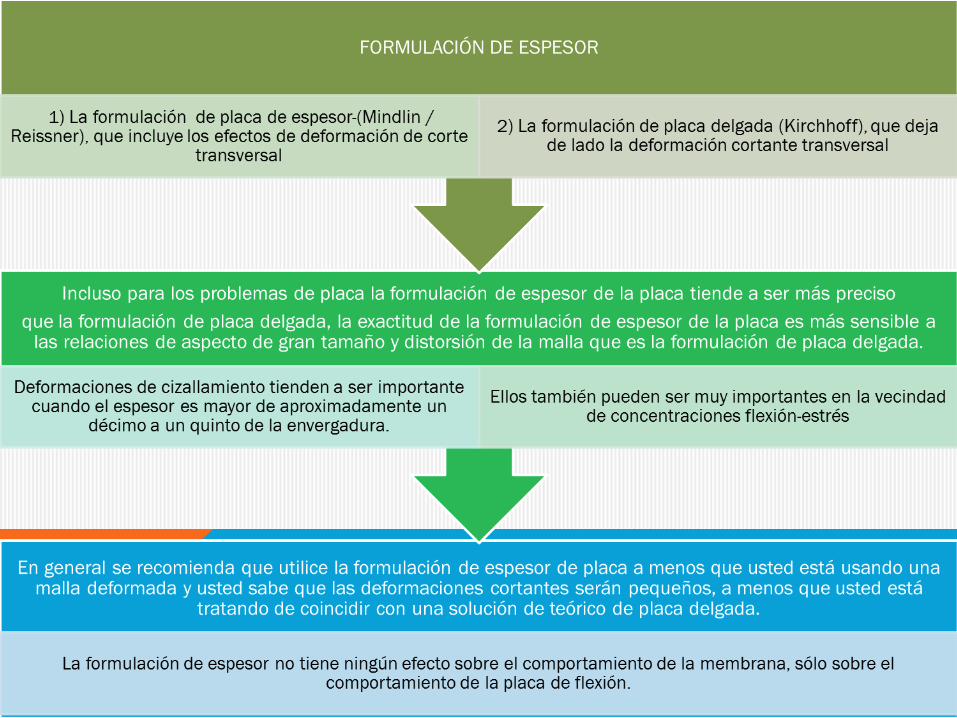
Una placa delgada (Kirchhoff) .- es la fórmula utilizada que descuida corte transversal deforma. Si lo desea, puede elegir un espesor de la placa (Mindlin / Reissner) formulación que incluye los efectos de la transversal cizallamiento deformación.


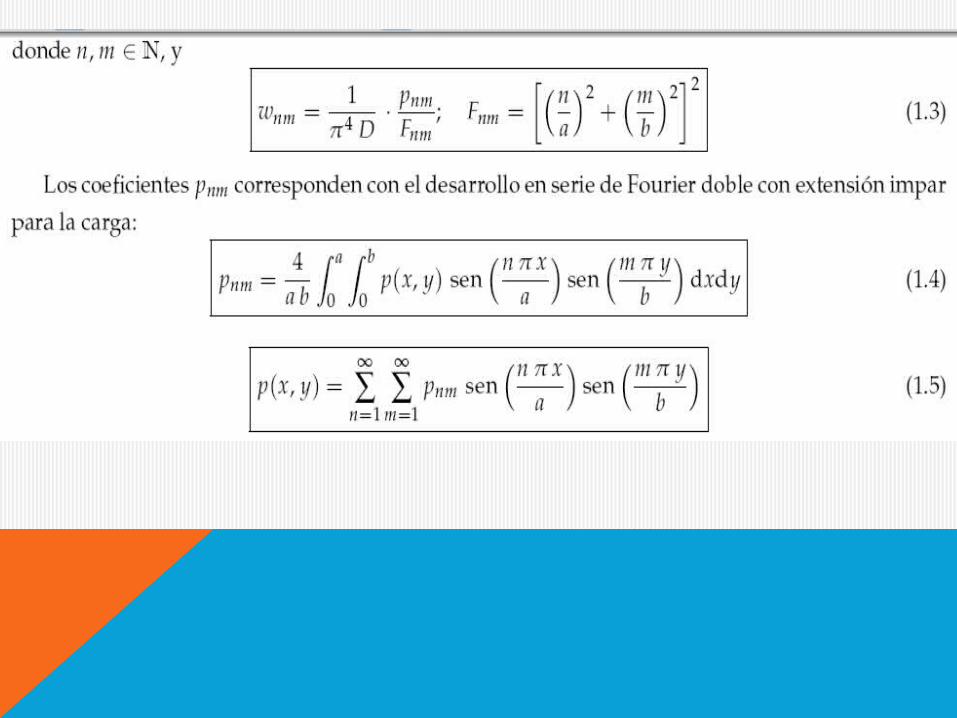
Una placa. delgada Rectangular (Navier) -
El método de Navier es aplicable en las siguientes condiciones:1. Placa rectangular, de dimensiones a b.2. Condición de apoyos simples en los cuatro bordes (placa tetra apoyada en bordes rectos).
w = 0; w,nn = 0

Estructuras que pueden ser modelados con este elemento son:
tanques
cúpulas
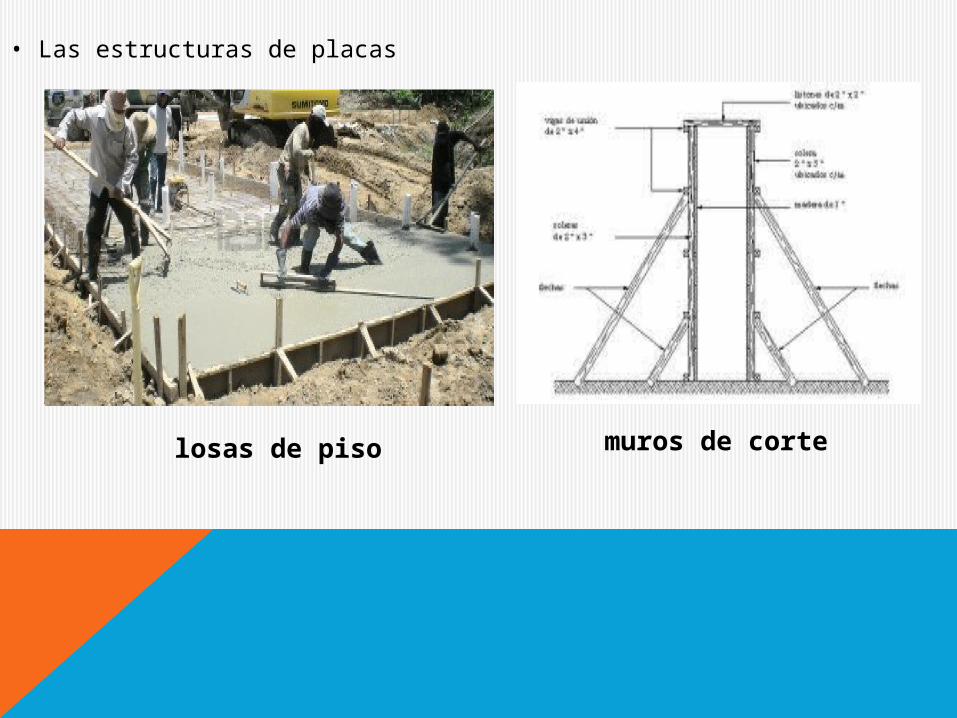
• Las estructuras de placas
losas de piso muros de corte
Para cada elemento de Shell en la estructura, se puede optar por:
Modelo de membrana
pura
Placa pura
Comportamiento concha

Cada elemento Shell tiene :
.
Una variable, de cuatro a ocho puntos formulación numérica integración se utiliza para la Shell rigidez. Tensiones y fuerzas y momentos internos, por el método de integración de Gauss y extrapolado a las articulaciones del elemento.
Una variable, de cuatro a ocho puntos formulación numérica integración se utiliza para la Shell rigidez. Tensiones y fuerzas y momentos internos, por el método de integración de Gauss y extrapolado a las articulaciones del elemento.

método de Gauss-Seidelmétodo de Gauss-Seidel
Sirve para determinar las soluciones de un sistema de ecuaciones lineales, encontrar matrices e inversas. Un sistema de ecuaciones se resuelve por el método de Gauss cuando se obtienen sus soluciones mediante la reducción del sistema dado a otro equivalente en el que cada ecuación tiene una incógnita menos que la anterior. El método de Gauss transforma la matriz de coeficientes en una matriz triangular superior. El metodo de Gauss-Jordan continúa el proceso de transformación hasta obtener una matriz diagonal.
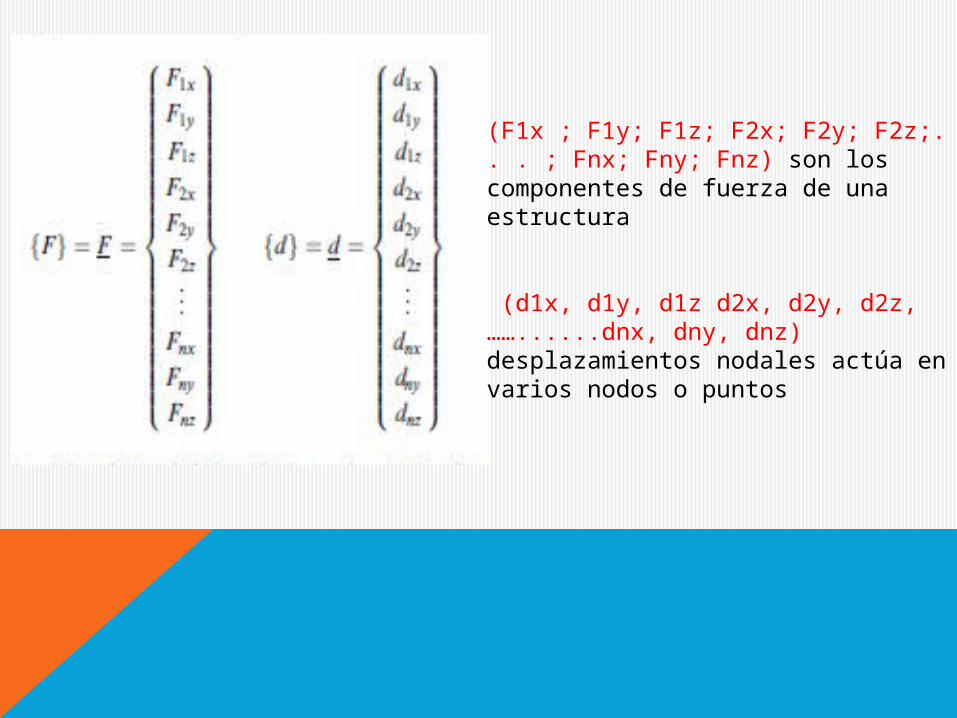
(F1x ; F1y; F1z; F2x; F2y; F2z;. . . ; Fnx; Fny; Fnz) son los componentes de fuerza de una estructura
(d1x, d1y, d1z d2x, d2y, d2z,……......dnx, dny, dnz) desplazamientos nodales actúa en varios nodos o puntos
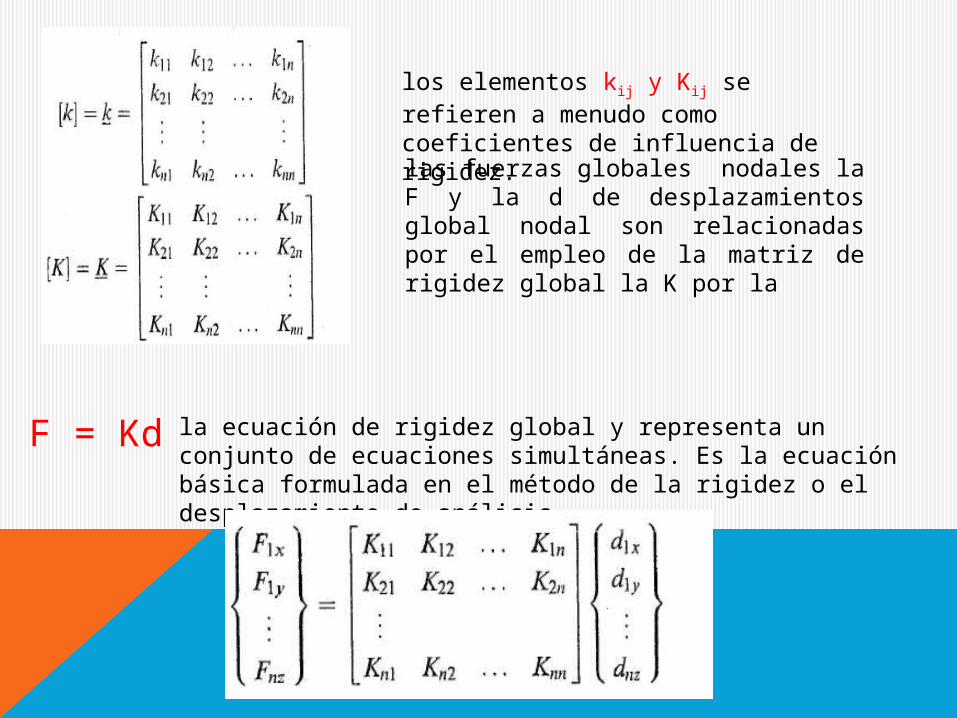
los elementos kij y Kij se refieren a menudo como coeficientes de influencia de rigidez.las fuerzas globales nodales la F y la d de desplazamientos global nodal son relacionadas por el empleo de la matriz de rigidez global la K por la
F = Kd la ecuación de rigidez global y representa un conjunto de ecuaciones simultáneas. Es la ecuación básica formulada en el método de la rigidez o el desplazamiento de análisis.
La solución del problema consiste en encontrar •los desplazamientos de estos puntos y a partir de ellos, las deformaciones y las tensiones del sistema analizado. •Las propiedades de los elementos que unen a los nodos, están dadas por el material asignado al elemento, que definen la rigidez del mismo, •la geometría de la estructura a modelizar (a partir de las Leyes de la Elástica).
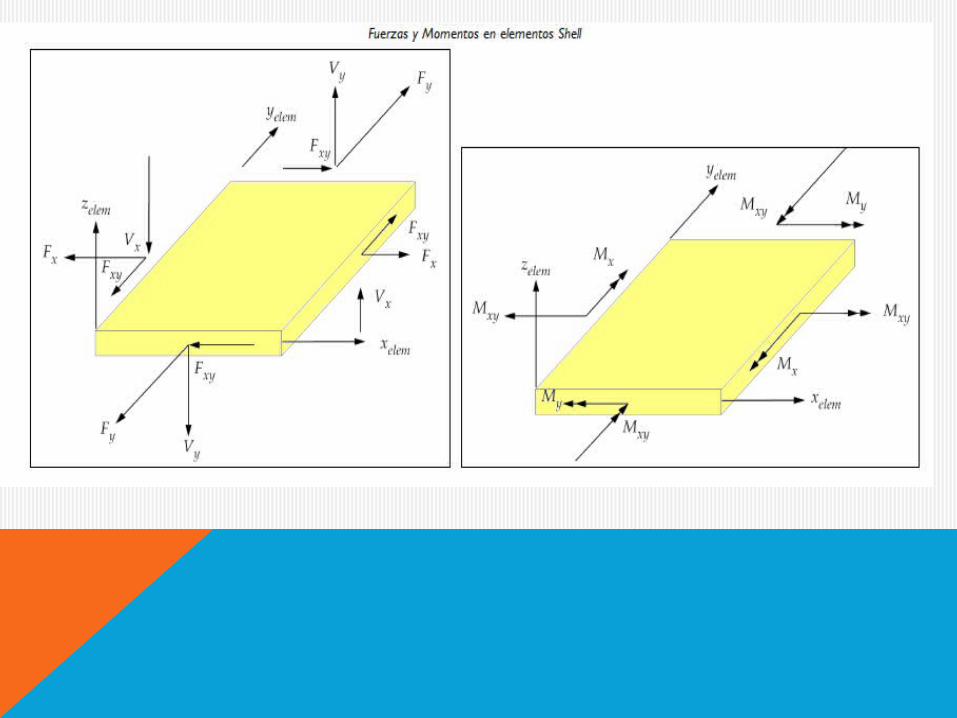
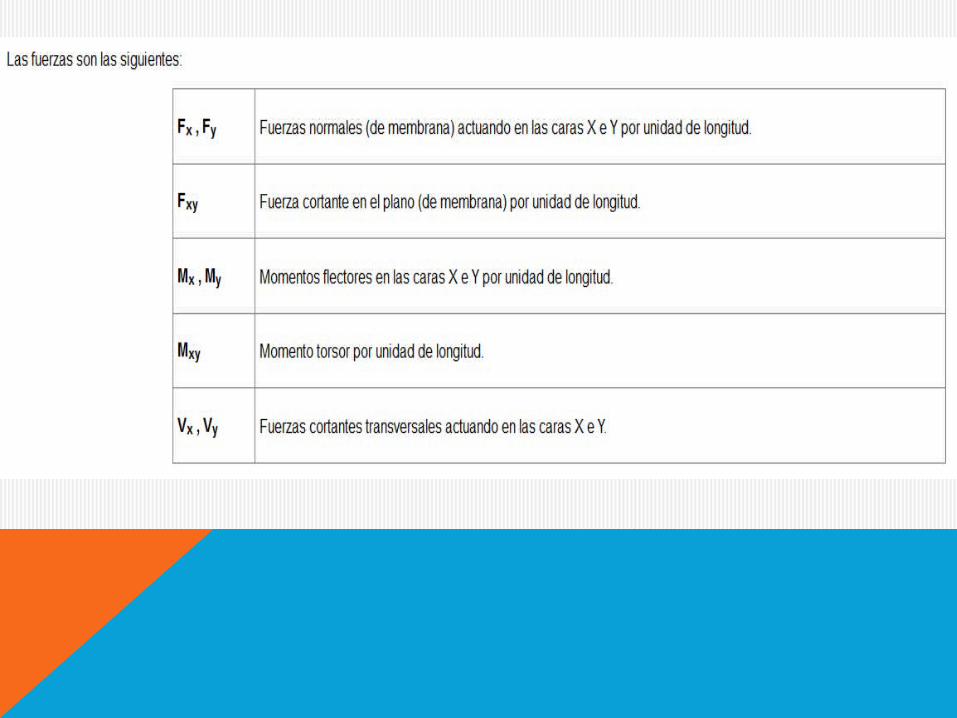
Las deformaciones y las fuerzas externas se relacionan entre si mediante la rigidez y las relaciones constitutivas del elemento:
[K] .{δ}={F}
Donde : • [K]: es la matriz rigidez del sistema • {δ}: es el vector desplazamientos • {F}: es el vector de esfuerzos
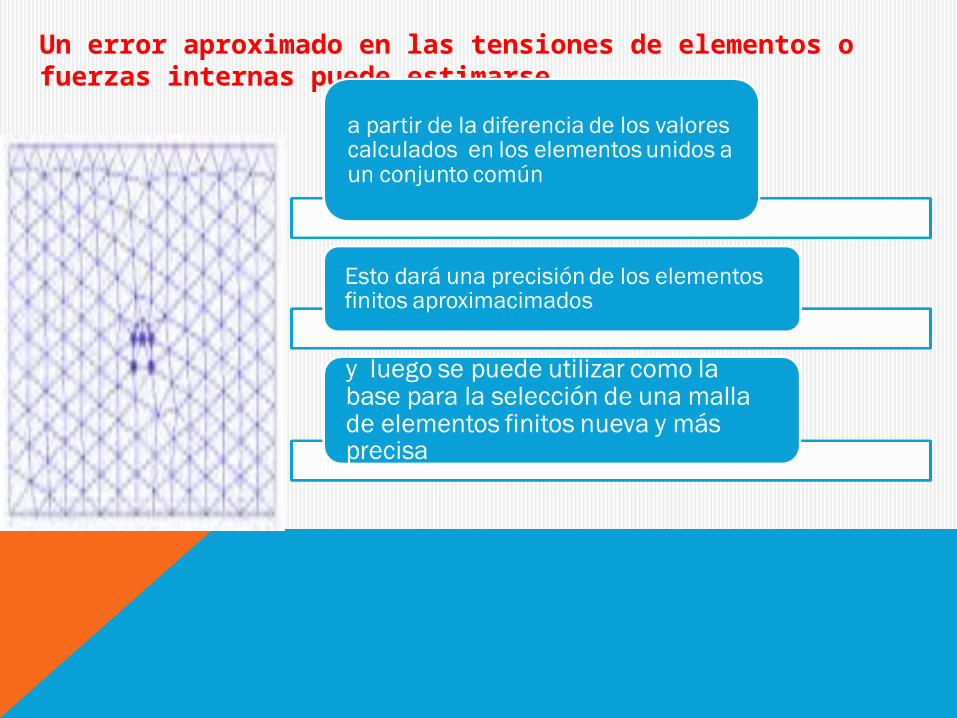
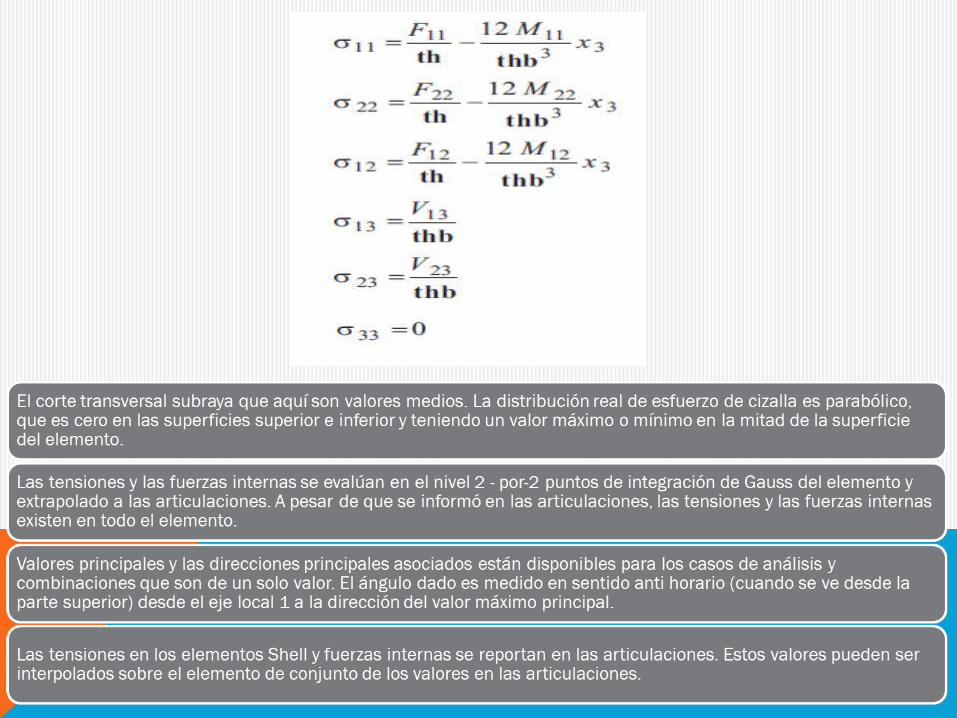
Un error aproximado en las tensiones de elementos o fuerzas internas puede estimarse

QUE ES EL METODO DE LOS ELEMENTOS FINITOS
• Es un método de cálculo utilizado en diversos problemas de ingeniería, que se basa en considerar al cuerpo o estructura dividido en elementos discretos, con determinadas condiciones de vínculo entre sí, generándose un sistema de ecuaciones que se resuelve numéricamente y proporciona el estado de tensiones y deformaciones.
• Es un procedimiento numérico aplicable a un gran número de problemas con condiciones de borde impuestas (en las estructuras las condiciones de borde serian: restricciones y cargas externas).
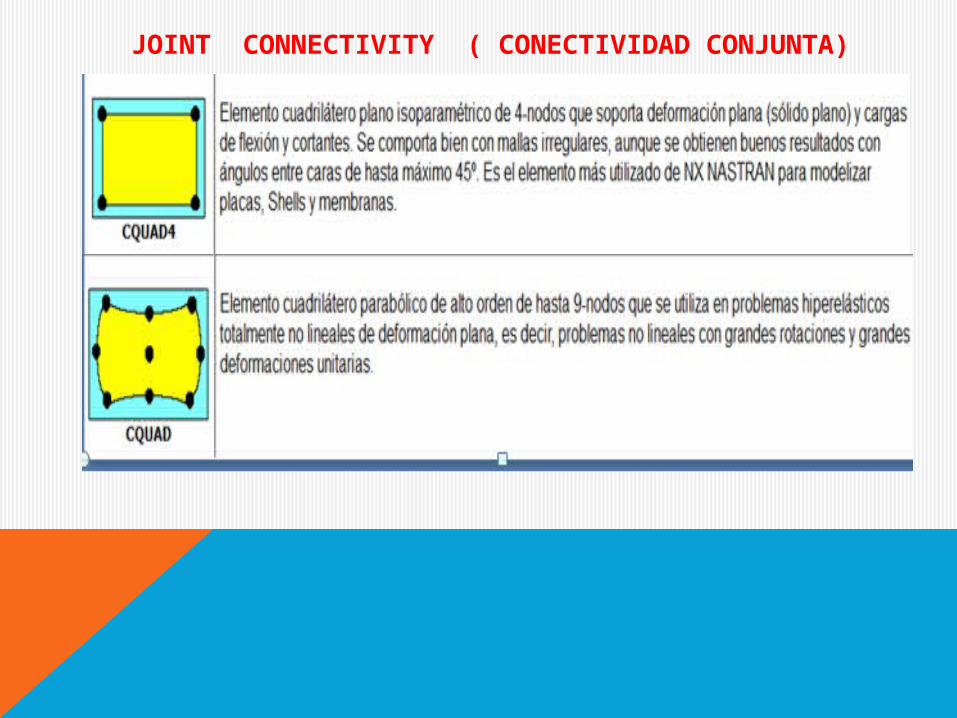
JOINT CONNECTIVITY ( CONECTIVIDAD CONJUNTA)
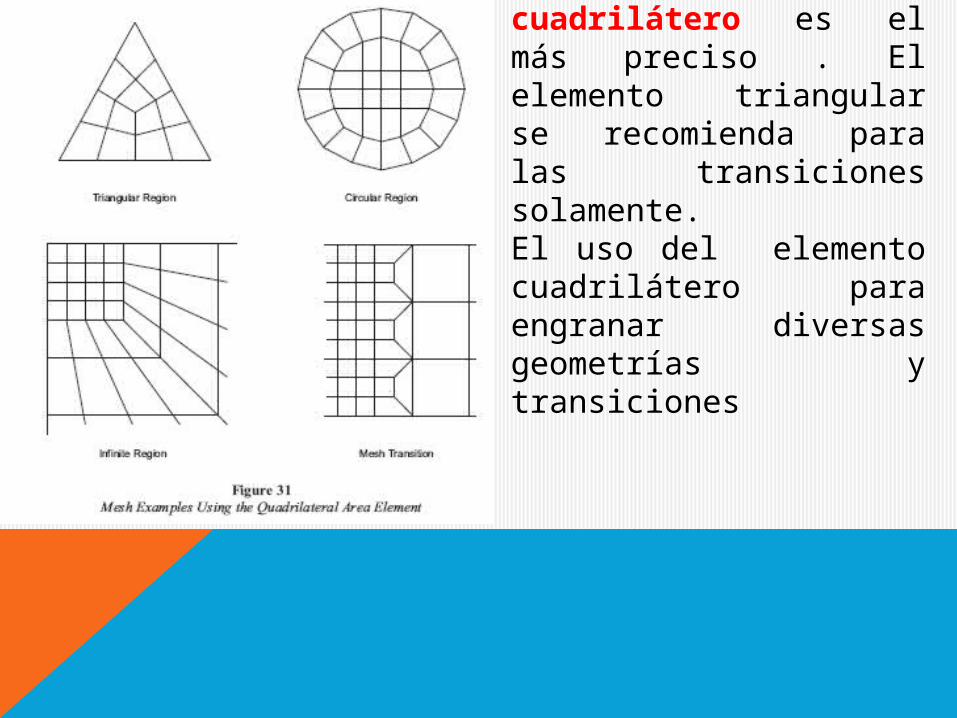
La formulación cuadrilátero es el más preciso . El elemento triangular se recomienda para las transiciones solamente. El uso del elemento cuadrilátero para engranar diversas geometrías y transiciones

Las ubicaciones de las juntas debe ser elegido para cumplir las condiciones geométricas siguientes: • El ángulo interior en cada
esquina debe ser inferior a 180 °. Los mejores resultados para elcuadrilátero se obtendrá cuando estos ángulos son cerca de 90 °, o al menos en larango de 45 ° a 135 °.• Para el cuadrilátero, los cuatro
articulaciones no tienen que ser coplanares. Una pequeña cantidad de giro en el elemento se explica por el programa. El ángulo entre la normales en las esquinas da una medida del grado de torsión. Los mejores resultados se obtenido si el mayor ángulo entre cualquier par de esquinas es menor que 30 °. Esta ángulo no deberá exceder de 45 °.
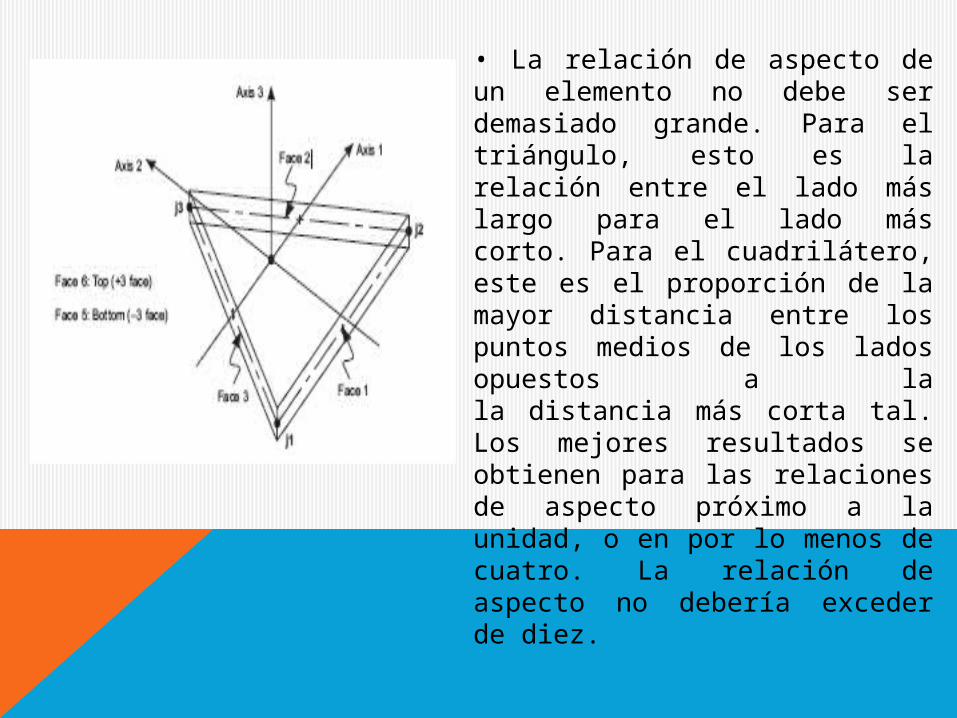
• La relación de aspecto de un elemento no debe ser demasiado grande. Para el triángulo, esto es la relación entre el lado más largo para el lado más corto. Para el cuadrilátero, este es el proporción de la mayor distancia entre los puntos medios de los lados opuestos a lala distancia más corta tal. Los mejores resultados se obtienen para las relaciones de aspecto próximo a la unidad, o en por lo menos de cuatro. La relación de aspecto no debería exceder de diez.

Estas condiciones generalmente pueden ser satisfechas con el refinamiento de malla adecuada. La precisión de la formulación de espesor de la placa es más sensible a las relaciones de aspecto de gran tamaño y distorsión de la malla que es la formulación de placa delgada.
Estas condiciones generalmente pueden ser satisfechas con el refinamiento de malla adecuada. La precisión de la formulación de espesor de la placa es más sensible a las relaciones de aspecto de gran tamaño y distorsión de la malla que es la formulación de placa delgada.

DEGRRES OF FREEDOM (GRADOS DE LIBERTAD)
La desviación del modelo estructural se rige por los desplazamientos de la articulaciones. Cada articulación del modelo estructural puede tener hasta seis componentes de desplazamiento:• La articulación puede trasladarse a lo largo de sus tres ejes locales. Estas traducciones se denotan U1, U2, U3 y.• La articulación puede girar alrededor de sus tres ejes locales. Estas rotaciones son de señalar R1,R2 y R3.
Estos seis componentes de desplazamiento se conocen como los Grados de libertad en conjunto. En el caso habitual en el que el sistema de articulación de coordenadas local es paralela al sistema global, los grados de libertad también puede ser identificado como UX, UY, UZ, RX, RY y RZ, a los ejes globales son paralelas a las que los ejes locales.
Cada grado de libertad en el modelo estructural debe ser uno de los siguientes tipos:• Activo - desplazar el ambiente se calcula durante el análisis• restringida - la colocación enfermedades se especifica, y es la reacción correspondiente calculada durante el análisis• el desplazamiento se determina a partir de los gobiernos desplazan a otrogrados de libertad• el desplazamiento no afecta a la estructura y por el análisis• el desplazamiento ha sido expresamente excluidos del análisis
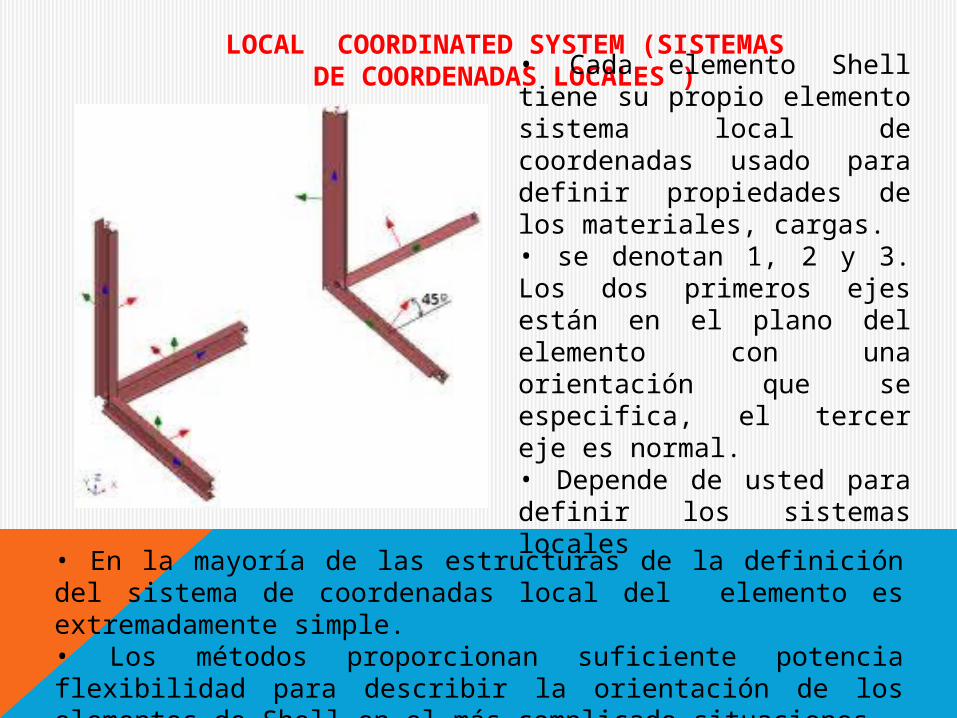
LOCAL COORDINATED SYSTEM (SISTEMAS DE COORDENADAS LOCALES
) • Cada elemento Shell tiene su propio elemento sistema local de coordenadas usado para definir propiedades de los materiales, cargas. • se denotan 1, 2 y 3. Los dos primeros ejes están en el plano del elemento con una orientación que se especifica, el tercer eje es normal.• Depende de usted para definir los sistemas locales
• En la mayoría de las estructuras de la definición del sistema de coordenadas local del elemento es extremadamente simple. • Los métodos proporcionan suficiente potencia flexibilidad para describir la orientación de los elementos de Shell en el más complicado situaciones.
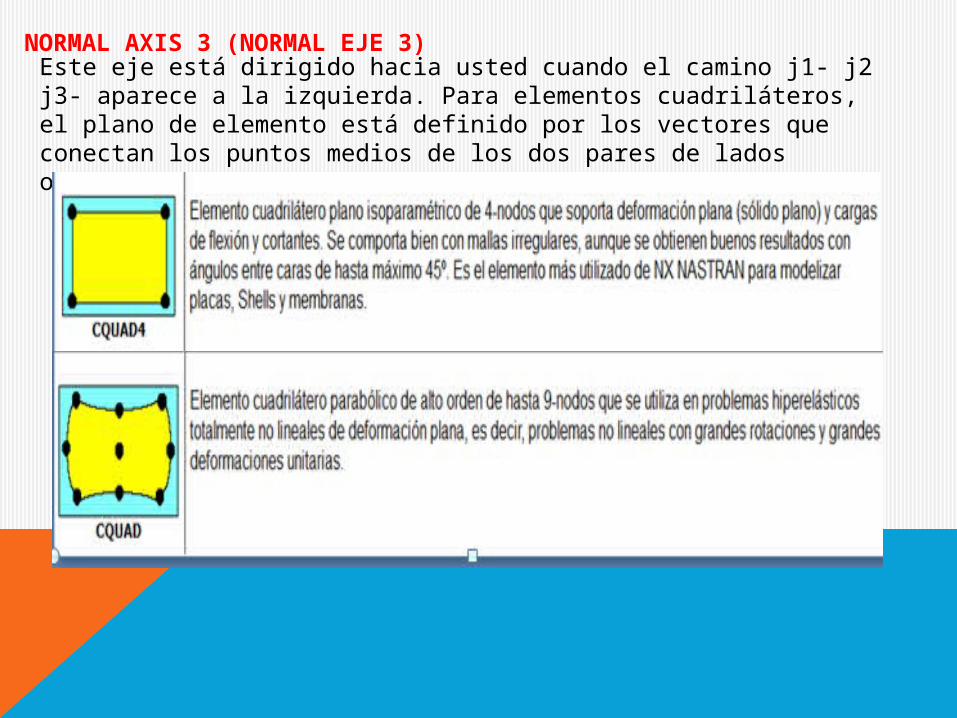
Este eje está dirigido hacia usted cuando el camino j1- j2 j3- aparece a la izquierda. Para elementos cuadriláteros, el plano de elemento está definido por los vectores que conectan los puntos medios de los dos pares de lados opuestos.
NORMAL AXIS 3 (NORMAL EJE 3)
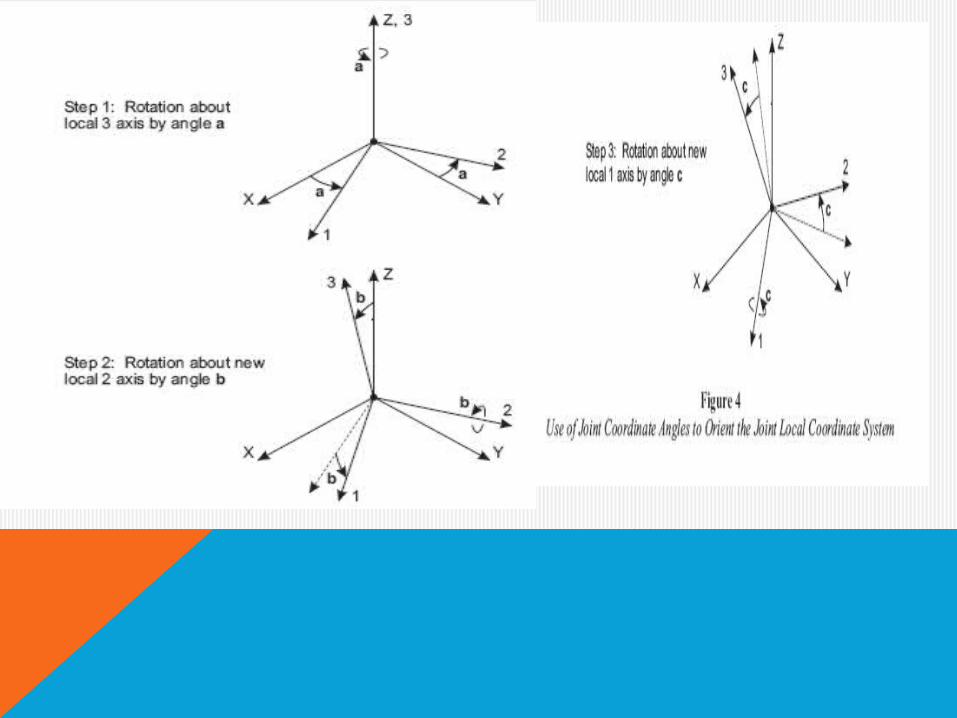
DEFAULT ORIENTATION (ORIENTACION POR DEFECTO)La orientación predeterminada de los ejes locales 1 y 2 se determina por la reltionship entre el eje local 3 y el eje global Z:• El local plano 3-2 se toma para ser vertical, es decir, en paralelo, al eje Z• El eje local 2 se lleva a tener un alza (+ Z) sentido a menos que el elemento es Tal horizonte, en cuyo caso se toma la local de eje 2 a lo largo de la dirección Y + mundial• El local de 1 eje es horizontal, es decir, se encuentra en el plano XYEl elemento se considera que es horizontal si el seno del ángulo entre el ser locales 3 y el eje Z es inferior a 10-3.El eje local 2 forma el mismo ángulo con el eje vertical como el eje local 3 forma con el plano horizontal. Esto significa que el eje local 2 apunta verticalmente ascendente para elementos verticales.
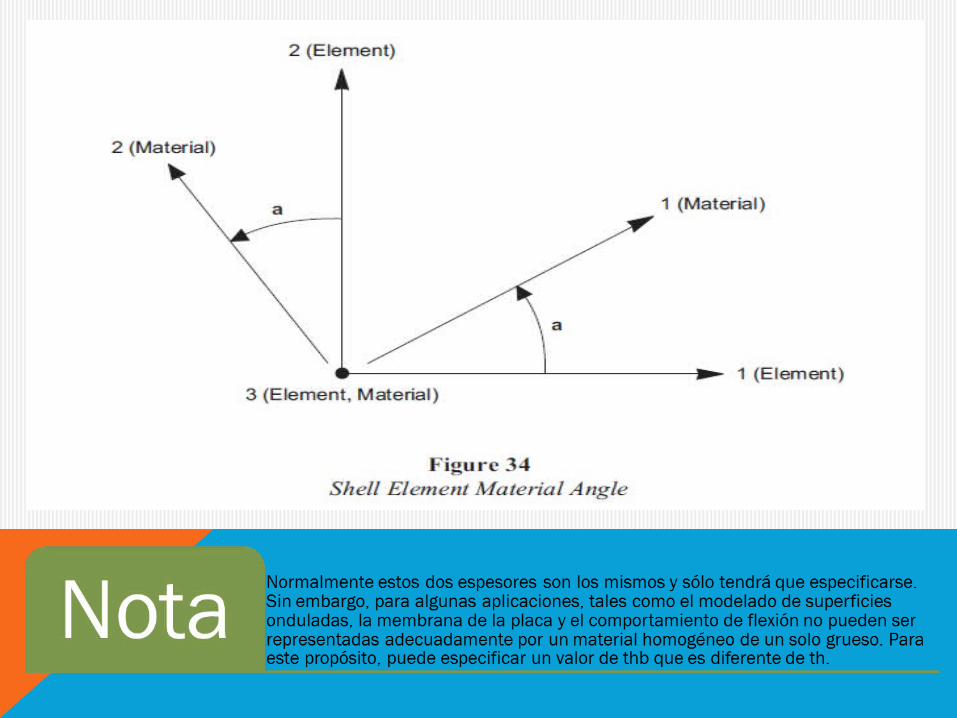
Se utiliza para definir las orientaciones elemento que son diferentes de la orientación predeterminada. Es el ángulo a través del cual los ejes locales 1 y 2 se hacen girar alrededor del eje 3 local positiva de la orientación predeterminada.La rotación de un valor positivo aparece en sentido antihorario cuando el eje 3 local está apuntando.
Para los elementos horizontales, es el ángulo entre el eje local 2 y la horizontal + Y eje. De lo contrario, es el ángulo entre el eje local 2 y el plano vertical que contiene el eje local 3.
Element coordinate angle (elemento de coordenadas de Angulo)

ADVANCED LOCAL COORDINATE SYSTEM (SISTEMA AVANZADO DE COORDENADAS LOCALES)
El sistema de coordenada local se define mediante el ángulo de coordenadas elemento medido con respecto a los globales Z + y + direcciones Y..
La orientación de la tangencial 1 local y 2 ejes, con respecto a un vector de referencia arbitrario, cuando el elemento de coordenadas de ángulo, es cero. Si Angulo es diferente de cero, que es el ángulo a través del cual los locales 1 y 2 ejes giran alrededor del eje 3 local positiva de la orientación determinada por el vector de referencia. El eje local 3 es siempre normal al plano del elemento.
REFERENCE VECTOR (REFERENCIA FECTOR)
Para definir los ejes locales tangenciales, se especifica un vector de referencia que es paralelo al plano deseado 3-1 o 3-2. El vector de referencia debe tener una proyección positiva sobre el correspondiente eje tangencial local (1 o 2, respectivamente). Esto significa que la dirección positiva del vector de referencia debe formar un ángulo de menos de 90 ° con la dirección positiva del eje deseado tangencial.

Para definir el vector de referencia, primero debe especificar o utilizar los valores predeterminados para:
• Una coordenada principal pldirp dirección (por defecto es + Z)• Un secundarias pldirs coordenadas de dirección (el valor predeterminado es + Y). El pldirp y no deben ser paralelos entre sí sin menos que esté seguro de que no son paralelas al eje local 3• Un coordenadas fijas CSYS sistema (el valor predeterminado es cero, lo que indica que el sistema de coordenadas global)• El plano local, local, que se determinará por el vector de referencia (el valor predeterminado es 32, lo que indica plano 3-2)
Si lo desea, puede especificar:• Un par de juntas, plveca y plvecb (el fallo de cada uno es cero, lo que indica el centro del elemento). Si ambos son iguales a cero, esta opción no se utiliza

Para cada elemento, el vector de referencia se determina :
1. Un vector se encuentra desde plveca una articulación a otra plvecb. Si este vector es de longitud finita y no es paralelo al eje local 3, que se utiliza como el vector de referencia Vp2. De lo contrario, la dirección de coordenadas pldirp primaria se evalúa en el centro del elemento en CSYS sistema de coordenadas fijas. Si esta dirección no es paralela al eje local 3, que se utiliza como el vector de referencia Vp3. De lo contrario, los pldirs coordenado de dirección se evalúa en el centrodel elemento fijo en CSYS sistemas de coordenadas tem. Si esta di rec ción no es paralelo al eje local 3, que se utiliza como el vector de referencia Vp4. De otro modo, el método falla y termina el análisis. Esto nunca ocurrirá si pldirp no es paralela a pldirs
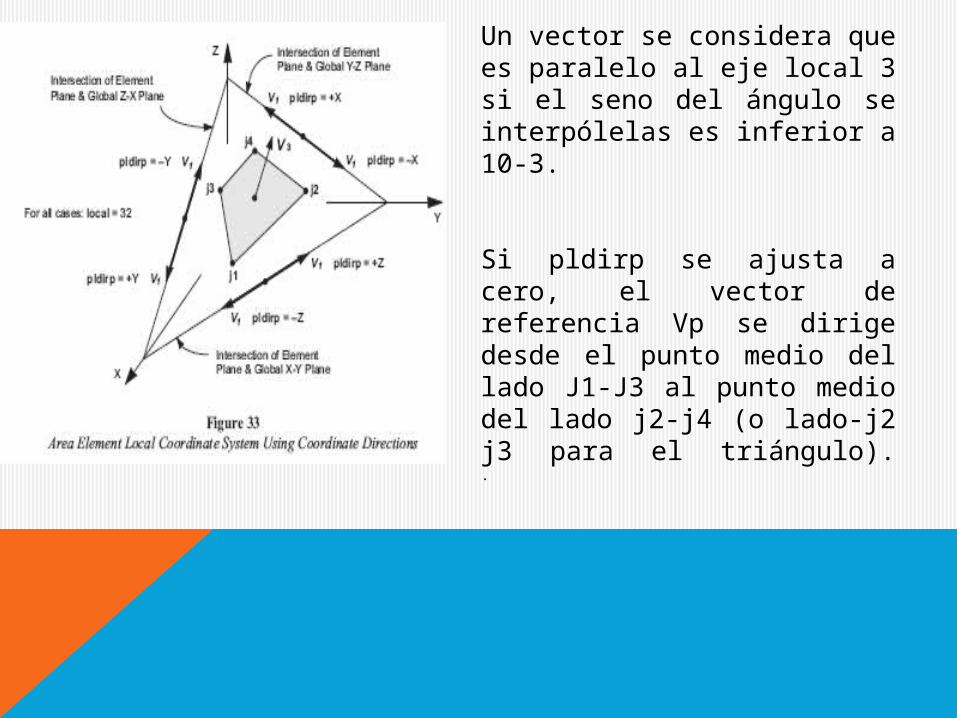
Un vector se considera que es paralelo al eje local 3 si el seno del ángulo se interpólelas es inferior a 10-3.
Si pldirp se ajusta a cero, el vector de referencia Vp se dirige desde el punto medio del lado J1-J3 al punto medio del lado j2-j4 (o lado-j2 j3 para el triángulo)..
El programa utiliza vectores productos cruzados para determinar los ejes tangenciales 1 y 2 una vez que el vector de referencia ha sido especificado. Los tres ejes están representados por los tres vectores unitarios V1, V2 y V3, respectivamente. Los vectores de satisfacer la nave de la relación entre productos:
V1 = V2 ´ V3Los ejes tangenciales 1 y 2 se definen como sigue:
• Si el vector de referencia es paralelo al plano 3-1, a continuación:
V2 = V3 ´ VpV1 = V2 ´ V3
• Si el vector de referencia es paralelo al plano 3-2, a continuación:V1 = Vp ´ V3 V2 = V3 ´ V1
Determining tangential axes 1 and 2 (determinacion de ejes tangenciales 1 y 2)



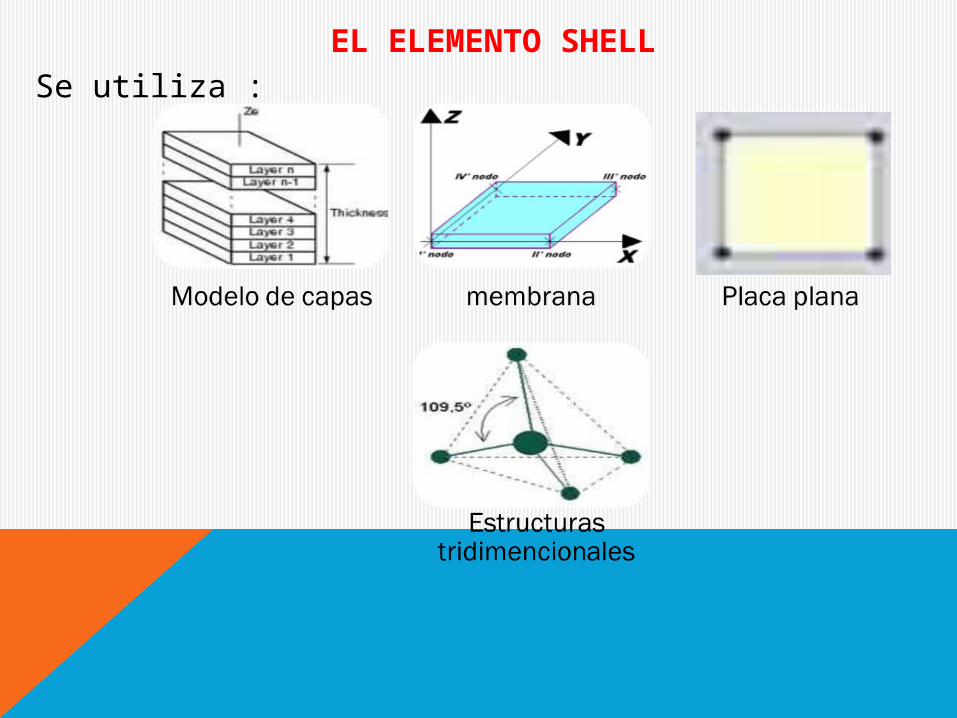
CADA SECCIÓN TIENE UN ESPESOR DE MEMBRANA CONSTANTE Y UN ESPESOR DE FLEXIÓN CONSTANTE.

MASA





GRACIAS POR SU ATENCIÓN…