Robot teleoperado de aplicación en entornos no estructurados
Click here to load reader
Upload
juan-vargas-ferrerCategory
view
213download
0description

7/21/2019 Brazo Teleoperado
http://slidepdf.com/reader/full/brazo-teleoperado 1/1
Brazo robótico tele operado de 4 grados de libertadmediante comunicación Inalámbrica XBEE con lenguaje de
programación C#
Rojas Dorian, Ángeles Francisco, Rodríguez Guilllermo
Instituto Tecnológico Superior de Huauchinango
Departamento de Ingeniería Mecatrónica, Sistemas Computacionales e Informática
Marzo de 2013
Hasta hace algunos años las interfaces que se utilizaban en la computación para lamanipulación de dispositivos electrónicos para poder integrar proyectos productivosse hacía mediante comunicación con puerto serial o paralelo. Gracias a los avances
tecnológicos se ha evolucionado y hoy en día podemos hacer comunicaciónmediante el puerto USB integrado con lenguaje de programación java o incluso C#el cual es un lenguaje de programación orientado a objetos desarrollado yestandarizado por Microsoft como parte de su plataforma .NET, y todo ello graciasa la aparición de dispositivos como lo es Arduino.
La tendencia en la actualidad es el uso de dispositivos de manera inalámbrica porello se dio a la tarea de desarrollar esta aplicación con un lenguaje de programaciónde este tipo dado que en la actualidad es un lenguaje popular entre las institucioneseducativas de nivel superior.
En el caso de la aplicación se usa Zigbee, el cual es un protocolo de comunicacionesinalámbrico basado en el estándar de comunicaciones para redes inalámbricasIEEE 802.15.4. Zigbee permite que dispositivos electrónicos de bajo consumopuedan realizar sus comunicaciones inalámbricas.
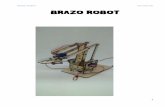
El brazo implementado de 4 grados de libertad tiene como actuadores unosservomotores de diferentes torques, que de acuerdo a su ubicación en la estructuradel brazo se dispusieron los de un torque mayor a los de mayor soporte de carga,como lo es en hombro y codo, y de menor torque para la carga de tronco y muñeca.
La retroalimentación se realiza mediante sensores rotativos y acelerómetros de 3
ejes, los cuales nos dan la posición de un exoesqueleto que es colocado en el brazodel usuario. Todas estas señales son recopiladas por la tarjeta Arduino Leonardo ymandadas de manera inalámbrica por un módulo Xbee hacia otro módulo Xbee quese encuentra colocado en el brazo robótico y que mediante la interfaz con una tarjeta
Arduino R3 comanda a cada uno de los servomotores que efectúan los movimientosque imitan en tiempo real, los movimientos que el usuario realiza con elexoesqueleto.