CAPÍTULO 3 Medidas de velocidad en túnel...
44
Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005 Elena García Ramírez 69 CAPÍTULO 3 Medidas de velocidad en túnel vacío 3.1 Introducción Para la caracterización del túnel de viento es necesario comenzar por las medidas en túnel vacío. Los resultados que se obtienen deben estar de acuerdo con el comportamiento del flujo en este tipo de régimen y configuración. Se realizará un estudio del nivel de fluctuación del flujo, así como de la turbulencia. Deben verificarse perfiles de velocidad planos como corresponden al régimen turbulento. Además se procederá a una verificación de los resultados a partir de la comparación con la simulación numérica realizada con Fluent.
Transcript of CAPÍTULO 3 Medidas de velocidad en túnel...
Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
69
CAPÍTULO 3
Medidas de velocidad en túnel vacío
3.1 Introducción
Para la caracterización del túnel de viento es necesario comenzar por las medidas en
túnel vacío. Los resultados que se obtienen deben estar de acuerdo con el
comportamiento del flujo en este tipo de régimen y configuración. Se realizará un
estudio del nivel de fluctuación del flujo, así como de la turbulencia. Deben verificarse
perfiles de velocidad planos como corresponden al régimen turbulento. Además se
procederá a una verificación de los resultados a partir de la comparación con la
simulación numérica realizada con Fluent.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
70
3.2 Generalidades teóricas [Ref.7]
A continuación se describen las características generales de la turbulencia, estado
característico del flujo a través del túnel de viento que se estudia.
3.2.1 Introducción
Se llama turbulencia al estado de un flujo que se caracteriza por su naturaleza fluctuante
y aparentemente aleatoria. Es el resultado de la pérdida de estabilidad de un flujo
laminar.
Los flujos laminares están caracterizados por el hecho de que las partículas de fluido se
mueven en capas o láminas. Las partículas que están en cierta lámina, permanecen en
ella. No pueden cambiar de capa.
Para el caso de un flujo con número de Reynolds más alto que un cierto número de
Reynolds crítico, el movimiento de las partículas se vuelve más tridimensional y
agitado. Las capas de fluido se intersectan y se mezclan; además, cambian como
función del tiempo de forma aparentemente aleatoria. Es difícil, por esto, describir
matemáticamente un flujo turbulento.
3.2.2 Descripción física de la turbulencia
La turbulencia desarrollada puede describirse físicamente por las siguientes
características:
• Naturaleza fluctuante. Tanto la presión como la velocidad fluctúan alrededor
de un valor medio. Las fluctuaciones son además de naturaleza tridimensional.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
71
• Aparición de remolinos. Las capas de fluido están acomodadas en estructuras
coherentes llamadas remolinos o vórtices. Los vórtices tienen una amplia
distribución de tamaños (escalas), que van desde la dimensión del flujo (tamaño
del contenedor) hasta el tamaño en el cual se disipa el movimiento bajo la acción
de la viscosidad (escala de Kolmogorov).
Figura 3.1. Remolinos característicos de la turbulencia
• Fluctuaciones pseudo-aleatorias. Aunque a simple vista, la naturaleza de las
fluctuaciones de velocidad y presión parezcan aleatorias, en realidad éstas se
distribuyen de una forma característica no enteramente al azar.
Figura 3.2. Fluctuaciones características de la turbulencia
3.2.3 Turbulencia desarrollada
Puesto que el flujo turbulento es muy complejo, resulta difícil describirlo con el tipo de
funciones matemáticas utilizadas en el flujo laminar (flujo tridimensional y no
estacionario).

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
72
Por esto para el estudio y descripción de la turbulencia se utilizan herramientas
estadísticas para describirlo. En particular, se usa el concepto de promedio temporal.
Cualquier variable, fluctuante o no, puede describirse a través de su promedio en el
tiempo.
Descomposición de Reynolds
La descomposición de Reynolds consiste en separar cualquier variable en dos
componentes, una estacionaria y otra fluctuante. Por ejemplo si se considera la medición
de la velocidad en el centro de un canal cuyo flujo es turbulento, puede encontrarse una
medición como la mostrada en la figura.
Figura 3. 3. Descomposición de Reynolds
La velocidad instantánea en este punto se puede describir como
)(')( tuutu +=
donde u es el promedio temporal y 'u es la componente fluctuante de la velocidad.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
73
Promedio temporal
Si se considera una variable cualquiera f, su promedio temporal está definido como:
∫+
=Tt
t
o
o
tfT
f )(1
Entonces puede escribirse que
'fff +=
3.2.4 Esfuerzos turbulentos
A partir de las ecuaciones de conservación para un flujo turbulento (Anexo A), se
obtiene el denominado tensor de esfuerzos turbulentos:
''''''
''''''
''''''''
wwvwuw
wvvvuv
wuvuuu
uut ji ρρ =∇−=∑
Estos esfuerzos extra tienen implicaciones físicas importantes:
• Los movimientos no estacionarios 'u , 'v , 'w provocan un flujo adicional de la
cantidad de movimiento.
• Se pueden interpretar como esfuerzos. A diferencia de los esfuerzos viscosos,
los esfuerzos turbulentos dependen de la naturaleza del flujo y no de la
naturaleza del fluido.
• En muchos flujos turbulentos, el tamaño de los esfuerzos turbulentos puede ser
más grande que los esfuerzos viscosos.
• Al aparecer nuevas incógnitas en las ecuaciones de conservación, se necesitan
más ecuaciones para cerrar el sistema. Se necesita una relación constitutiva
turbulenta.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
74
3.3 El equipo experimental
El equipo experimental que se ha usado para realizar las medidas de velocidad del flujo
mediante la técnica PIV es una estructura compleja y articulada compuesta por distintos
subsistemas.
Se puede realizar una subdivisión en tres sistemas principales, atendiendo a la función
que desempeñan.
El túnel de viento
Se trata de un sistema completo e independiente del resto, donde tienen lugar los
experimentos.
La caracterización del túnel de viento con el que se trabaja viene detallada en el
Capítulo 1.
El sistema PIV
Se trata de un complejo sistema tecnológicamente avanzado, dedicado a la adquisición,
tratamiento y transmisión de datos experimentales. Es el sistema que comunica los dos
restantes. Concretamente se ha hecho uso de un sistema PIV-2d.
Los componentes del sistema y sus especificaciones técnicas son los siguientes:
− Una pareja de láseres Nd-YAG, láseres pulsantes, que emiten impulsos de
potencia de 10 MW (energía de 100 mJ emitida durante un período de 10 ns) y de
longitud de onda 532 nm (luz verde). Se trata de un modelo ‘solo PIV’ fabricados
por New Wave. Con una frecuencia máxima de 10 Hz.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
75
− Para la captación de imágenes se ha usado una cámara PCO Sensicam de alta
resolución (1280 x 1024 píxeles). El objetivo utilizado es un modelo macro de
relación 1:1 con una apertura 1:2,8, de 50 mm fabricado por SIGMA. Permite
obtener parejas de imágenes a intervalos de tiempo de pocas decenas de µs con una
frecuencia máxima de adquisición de 4 Hz.
− El software utilizado para la obtención de los mapas vectoriales es el
FlowManager de Dantec.
El sistema PIV ha sido adquirido por el D.I.E.N.C.A. a través de la Dantec
Measurement Technology.
La descripción del sistema PIV viene ampliamente detallada en el Capítulo 2.
El ordenador
Se trata de un ordenador que interacciona con el sistema PIV, ya sea para recopilar los
datos experimentales, para analizar los resultados obtenidos o para controlar la puesta
en marcha de los experimentos.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
76
3.4 Procedimiento experimental
El proceso de experimentación comprende todos los procedimientos que deben
desarrollarse para la obtención de las imágenes, desde el enfoque de la cámara, pasando
por el sembrado de partículas hasta la propia adquisición. A continuación se describe el
proceso de experimentación para un experimento estándar. Esta secuencia de acciones
se repite para cada experimento.
3.4.1 Posicionamiento de la cámara
Deben captarse imágenes sobre un plano trasversal normal al flujo que comprenda
completamente la altura de la cámara de ensayos.
Se refiere la cámara de ensayos a unos ejes coordenados x, y, z:
Figura 3.4. Sistema coordenado de referencia
Las medidas se realizarán sobre el plano z =20cm.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
77
En todo el proceso de experimentación la cámara se mantendrá a una distancia fija de la
cámara de ensayos. Esta distancia no se elige arbitrariamente, se limita superiormente
por el enfoque del objetivo e inferiormente por el interés de minimizar el número de
imágenes a analizar. Esta distancia es de 60 cm. Para ésta las dimensiones de la imagen
captada por la cámara son de 160 x 127 mm2. Por lo tanto, para caracterizar la sección
es necesario captar al menos tres imágenes. Este hecho introduce dificultades en el
análisis de los datos, puesto que es necesario realizar posteriormente la unión de los
campos de velocidades.
Se ha elegido una serie de captación de cuatro imágenes, de modo que la superposición
de las mismas sea mayor. Las coordenadas que posicionan cada una de las imágenes
vienen detalladas en la siguiente tabla:
Coordenada x0 (mm) xf (mm) y0 (mm) yf (mm) z (mm)
Imagen 1 258 418 0 127 200
Imagen 2 258 418 100 237 200
Imagen 3 258 418 175 302 200
Imagen 4 258 418 210 337 200
Tabla 3.1. Coordenadas de las imágenes captadas
Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
78
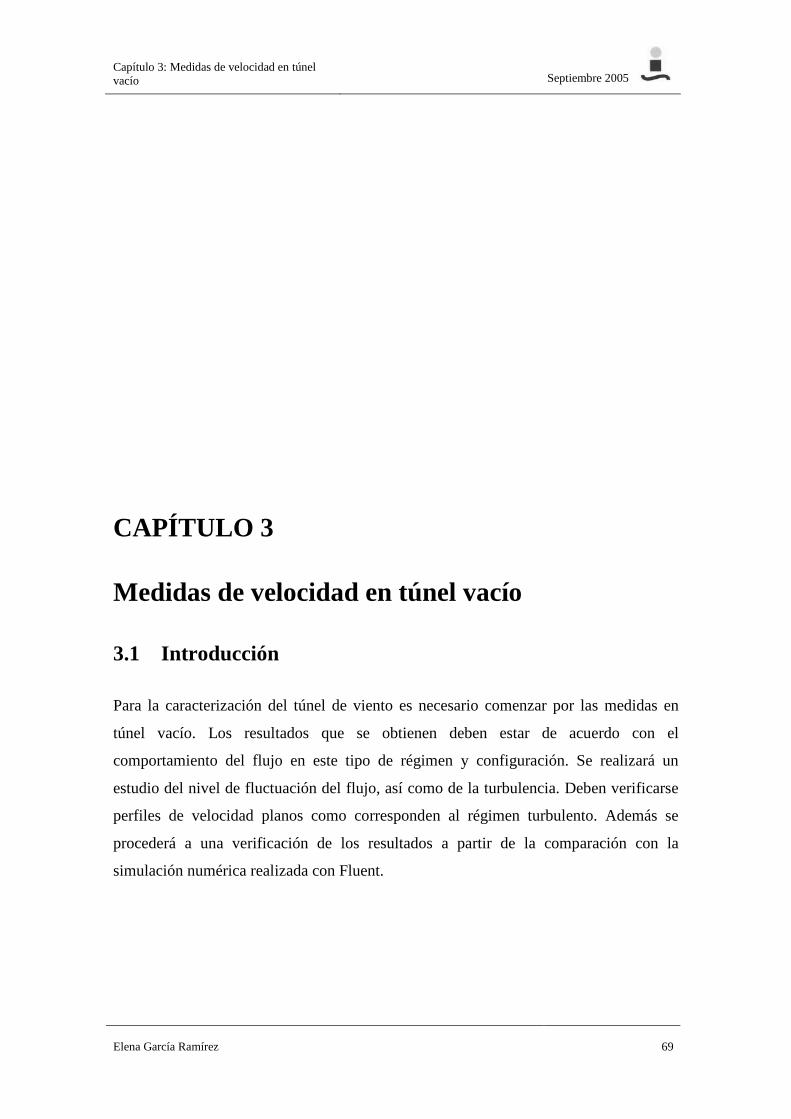
Una muestra de las imágenes tomadas para determinar el posicionamiento de la cámara
en cada una de las captaciones es la siguiente:
Figura 3.5. Posicionamiento 1 de la cámara para
la captación completa del campo de velocidades
Figura 3.6. Posicionamiento 4 de la cámara para
la captación completa del campo de velocidades
Se muestran las imágenes que limitan con las paredes de la cámara de ensayos porque
son éstas las que presentan algunos inconvenientes. Por un lado, debe observarse que
hay una porción de imagen en ambos casos que no representa el volumen de control,
sino parte de la instalación. Debe procederse de esta manera en la captación para evitar
la pérdida de información. A la hora del tratamiento de los datos, deberá tenerse en
cuenta que el plano de medida comienza (en el primer caso) 12cm por encima del límite
inferior de la imagen captada. En el segundo caso, el plano de medida acaba 20cm por
debajo del límite superior de la imagen. Además deberá hacerse uso de un factor de
escala para transformar esas y otras dimensiones. Esto es debido a que al tomar las
imágenes anteriores, la métrica de referencia se encuentra en el plano de fondo de la
cámara de ensayos, y no en el plano de medida (z =20cm), por lo que deberán
traspasarse a dicho plano los límites de las imágenes que se fijan en el plano de fondo.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
79
Además de lo ya dicho existe otro problema importante, se trata de la reflexión de las
paredes del túnel. Como puede verse en las figuras anteriores, al iluminar la cámara de
ensayos, las paredes reflejan parte de esta luz, de modo que en el volumen adyacente
está excesivamente iluminado, lo que provoca una distorsión importante en la
adquisición de datos. Como se verá más adelante no es posible obtener datos
congruentes en esta zona, por lo que al estudiar la capa límite sólo se dispondrá de un
pequeño conjunto de valores (el resto no pueden tomarse como buenos).
3.4.2 Enfoque de la imagen
Para obtener buenos resultados es necesario enfocar el plano de captación. El
procedimiento es el siguiente: se acopla a la base de aluminio de la cámara de ensayos
un cilindro a la altura de captación de la imagen, se accionan el láser en modo “low”
(rayo de baja intensidad luminosa que no daña el ojo humano) y el programa
FlowManager, de forma que pueden visualizarse las imágenes captadas por la cámara.
Se manipula el objetivo hasta que el rayo luminoso sobre el cilindro se muestra nítido.
Este proceso deberá repetirse cada vez que se cambie de plano de captación.
3.4.3 Calibración
La bondad de los datos obtenidos con la técnica PIV está directamente relacionada con
la calidad de la calibración. La calibración permite realizar la conversión entre los
píxeles de la cámara y las dimensiones reales de la imagen. A partir de esta conversión
se determina la longitud de los vectores velocidad, es por ello que este procedimiento es
crucial. Una vez realizado el enfoque de la cámara se retira el cilindro de la cámara de
ensayos y se introduce una carta milimetrada sujetada por pequeños bloques de
aluminio. La calibración de la imagen se realiza a partir del campo “Field of View” del
software FlowManager. Se capta una imagen y en ésta se fijan dos puntos sobre el papel
de dimensiones reales conocidas. El software devuelve el factor de escala.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
80
Al igual que el enfoque de la cámara, el proceso de calibración deberá realizarse cada
vez que se cambie de plano de captación, o bien cuando varíe la distancia entre la
cámara y la cámara de ensayos (que en este caso permanecerá siempre fija).
Figura 3.7 Montaje para la calibración
3.4.4 Sembrado de partículas
Los dos parámetros determinantes para un sembrado de partículas adecuado en el
sistema PIV son la densidad de las partículas en el espacio y el tamaño de las mismas.
Es decir, debe realizarse un sembrado lo suficientemente denso para obtener buenos
resultados, pero no excesivo para permitir la diferenciación de las partículas. En cuanto
al tamaño, como ya se ha introducido, debe encontrarse un compromiso. Por un lado, es
necesario usar partículas de un tamaño considerable para la mejor eficiencia en el
reflejo de la luz, pero debe contrastarse con la necesidad de partículas pequeñas para el
seguimiento óptimo de la cinemática del flujo.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
81
En general, para un sembrado óptimo de un flujo, deben elegirse partículas inertes
respecto a éste. Una partícula es inerte respecto a un flujo cuando tiene su misma
densidad y es de naturaleza tal que no existe una interacción entre ella y el flujo. Existen
diversos artículos que tratan en profundidad este aspecto, véanse los estudios de Yang,
T.S. [Ref.8].
Por otro lado, debe elegirse un tamaño de partícula tal que sea comparable a la escala
mínima de las estructuras de velocidad que desean estudiarse. Así cuanto mayor sea el
tamaño de la partícula, mayor será la escala de la estructura mínima de velocidad que la
partícula es capaz de seguir.
Obviamente al sembrar un flujo de aire con cualquier tipo de partículas, éstas no serán
inertes pues su densidad es siempre distinta, sin embargo, puede comprobarse que si las
medidas se realizan a distancias pequeñas respecto al punto de sembrado, la trayectoria
de la partícula es rectilínea, siguiendo así al flujo y considerándose inertes en ese
espacio.
El modo más eficaz para la elección del tipo de partículas y el modo del sembrado es la
propia experimentación. Dos serán los criterios que se seguirán para determinar si un
sembrado es adecuado:
-Las líneas de corriente que se visualizan con el sistema PIV deben ser coherentes con
el flujo. Este punto comprende varios aspectos tratados anteriormente:
-El campo de velocidades obtenido a partir de la técnica PIV debe ser bueno, es
decir, no pueden existir excesivos vectores no válidos. Esto está estrechamente
relacionado con la densidad del sembrado.
-El campo de velocidades visualizado debe ser coherente. La experiencia
permite reconocer a primera vista si un campo es bueno o no. Al mismo tiempo
puede controlarse la componente vertical de la velocidad en cada punto. Esta
componente debe ser insignificante respecto a la horizontal. Este aspecto está
estrechamente relacionado con el seguimiento del flujo que la partícula realiza,
es decir, con su inercia respecto a éste.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
82
-El sistema de sembrado debe ser eficaz. No puede recurrirse a un sistema
excesivamente complejo o que presente problemas para la repetición del proceso puesto
que se realizan una gran cantidad de pruebas en poco tiempo.
Consultando los trabajos experimentales publicados se encuentran dos tipos de
sembrado más difundidos, son aquellos que utilizan generadores de humo que
pulverizan agua y aceite.
Partículas de aceite pulverizado
Siguiendo esta tendencia, la experimentación en el DIENCA comienza con un
generador de partículas de aceite pulverizado. Se trata de un sistema Fogmachines F1,
DTS. Este sistema proporciona una óptima visualización del flujo (Figura 3.8); sin
embargo, el tamaño de partículas es excesivamente pequeño, así como la densidad del
sembrado demasiado elevada, lo que impide obtener buenos resultados mediante técnica
PIV (Figura 3.9).
Figura 3.8. Visualización con partículas de aceite

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
83
La visualización es muy buena. Sin embargo, cuando se procede con la cross-
correlation, se obtiene el siguiente mapa de vectores:
Figura 3.9. Cross- correlation, mapa de vectores bruto con partículas de aceite
La zona ocupada por el cilindro y la sombra que genera el láser deben ser analizadas en
otro modo, en este espacio es coherente que los vectores no sean buenos. Sin embargo,
en el resto del campo siguen viéndose excesivos vectores a sustituir.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
84
Se procede con la validación:
Figura 3.10. ”Moving Average”, mapa de vectores con partículas de aceite
Los vectores en verde son aquellos que han sido sustituidos, el programa no reconoce
como incongruentes el resto de estructuras que realmente lo son.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
85
Posteriormente se procede al filtrado, que pulirá el campo en su totalidad, para evitar
variaciones pronunciadas.
Figura 3.11. Filtro, mapa de vectores con partículas de aceite
Se obtiene un campo definitivo que no es bueno.
Esta técnica de sembrado se deshecha pues no es compatible con el análisis PIV.
Partículas sólidas
Tras los resultados obtenidos con las partículas de aceite, se opta por una
experimentación con partículas más gruesas y un sembrado menos denso. Se elige el
talco. Trabajar con partículas sólidas tiene una gran ventaja respecto a las partículas
pulverizadas y es que existe en todo momento un control sobre la granulometría. Con
las partículas pulverizadas ocurre que éstas pueden colapsar en el interior del túnel
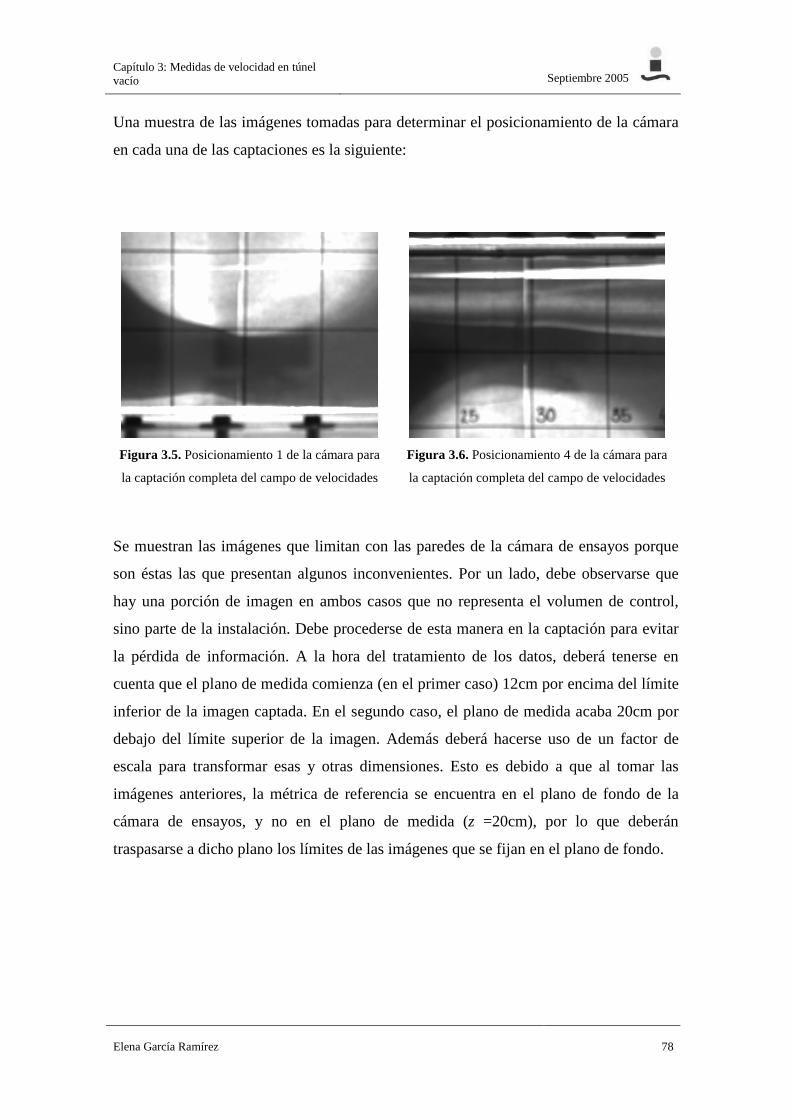
variando así su geometría inicial. El sistema para el sembrado se crea en el propio
laboratorio mediante un equipo que consiste en un depósito contenedor del talco
conectado a una toma de aire a presión y a un embudo que permite la dispersión de las
partículas.
Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
86
Esta configuración se esquematiza en la figura adjunta:
Figura 3.12. Dispositivo para el sembrado de partículas de talco

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
87
El sembrado del talco en el túnel resulta aceptable, la visualización es buena y los
resultados PIV también lo son. Sin embargo, aparece un inconveniente que hace que se
rechace esta técnica: tras un número pequeño de pruebas, el talco ha cubierto las
paredes de la sección de prueba y la visualización se hace imposible, existe una
interacción fuerte entre las partículas y la propia estructura del equipo. Además con el
sistema de sembrado construido no sólo se siembra el flujo si no todo el laboratorio.
Resulta incómodo trabajar con el talco, pues es necesario limpiar el túnel (y el
laboratorio completo) tras un número pequeño de pruebas.
Figura 3.13. Visualización con partículas de talco

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
88
Figura 3.14. Visualización con partículas de talco tras 74 tomas
Partículas de agua pulverizada
Por último, se sigue la tendencia encontrada en bibliografía y se prueba con un
sembrado de partículas de agua destilada pulverizadas. El sistema de pulverización es
una pistola a presión tipo Laskin. Este tipo de sembrado resulta adecuado para la
experimentación PIV tanto por el tamaño de las partículas como por la densidad de las
mismas en la imagen, además de ser sencillo y limpio.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
89
Figura 3.15. Visualización con partículas de agua
En cualquier experimento en el que se trabaje con partículas es imprescindible estudiar
la granulometría de éstas. Desgraciadamente, debido a la variabilidad en las condiciones
de sembrado con la pistola Laskin y a la inexistencia en el laboratorio de una técnica de
medida, sólo puede estimarse de un modo poco exacto el orden de magnitud de las
partículas que se usan. Para esto, sencillamente se compara el tamaño de una partícula
en una de las imágenes tomadas con la métrica de la imagen en píxel (métrica que el
sistema PIV introduce). Hacer notar, que además del error humano inevitable, existe un
error asociado a la propia imagen, puesto que la cámara capta además de la partícula,
una aureola de luz reflejada en torno a ésta.
Sólo en un modo orientativo puede decirse que el orden de magnitud del diámetro de las
partículas con las que se trabaja está en torno a las 100µm.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
90
3.4.5 Adquisición de imágenes
Los parámetros característicos de la adquisición de imágenes son:
− tiempo entre los pulsos,
− tiempo entre los registros,
− número de registros en la secuencia,
− factor de escala,
− campo de visión.
El tiempo entre los pulsos debe elegirse de modo que sea suficientemente largo para
permitir el cálculo del vector desplazamiento, pero lo suficientemente breve para evitar
que las partículas con una componente de velocidad fuera del plano abandonen la
lámina de luz. Una vez fijados el resto de parámetros se determinará el tiempo entre los
pulsos.
El tiempo entre los registros viene limitado por la capacidad de la cámara, es decir, por
el número máximo de imágenes que puede captar en la unidad de tiempo. La cámara
usada puede captar un máximo de 4 imágenes por segundo. Aprovechando al máximo
esta capacidad, el tiempo entre los registros será de 250 ms. De esta manera el láser se
sincroniza con la cámara, disminuyendo su frecuencia a 4 Hz.
El número de registros en la secuencia se fija en 150. Se elige un número tan elevado
porque el estudio del flujo turbulento se realiza mediante métodos estadísticos, por lo
que es necesario obtener un gran número de datos. Se tiende a realizar el número
máximo de adquisiciones, se obtienen 150 registros debido al límite de memoria del
procesador.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
91
El factor de escala S es la relación entre las dimensiones de la imagen a escala real y de
la imagen captada por la cámara. La determinación del factor de escala en un modo
correcto es decisiva en todo el trabajo, pues es éste el que determinará las dimensiones
de los vectores de velocidad. Para su obtención debe realizarse la calibración de la
imagen. La calibración de la imagen se realiza a partir del campo “Field of View” del
software FlowManager. Una vez que la posición y el enfoque de la cámara se han
establecido, se introduce una hoja milimetrada en la cámara de ensayos (Fig. 3.1), se
capta una imagen y en ésta se fijan dos puntos sobre el papel de dimensiones reales
conocidas. El software devuelve el factor de escala. Siempre que la distancia de la
cámara a la cámara de ensayos sea la misma, el factor de escala no cambiará. Esta
distancia no se elige arbitrariamente, se limita superiormente por el enfoque del objetivo
e inferiormente por el interés de aprovechar al máximo las dimensiones de la imagen.
La cámara se sitúa a 60 cm de la cámara de ensayos. Para esta distancia el factor de
escala es de 13,785.
Las dimensiones del campo de visión, producto del punto anterior, son de 160mm x 127
mm.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
92
Una vez fijados el resto de parámetros de adquisición de imágenes puede procederse a
la determinación del tiempo entre los pulsos, considerando las dimensiones del área de
interrogación recomendadas (según se vio en el Capítulo 2), es decir, para la cross-
correlation 32 x 32. Para que la partícula no salga del marco de la imagen que toma la
cámara es necesario que su desplazamiento sea inferior a las dimensiones horizontales
de la misma, se considera un desplazamiento máximo conservador de 1/3 de la
dimensión del área de interrogación. Para obtener este intervalo de tiempo se debe
además estimar la velocidad del flujo. Para ello se hace uso de un anemómetro de hilo
caliente a la frecuencia media del ventilador, 25 Hz, se obtiene una velocidad media de
4 m/s. Teniendo en cuenta que las dimensiones del plano objeto son 160 x 127 mm2 y
que los píxeles usados por la cámara son 1280 x 1024, se obtiene que la dimensión
horizontal del área de interrogación es de:
imagenpx
realareapx N
DNd
−− ⋅= int
donde
intareapxN − es el número de píxel en la dirección horizontal del área de interrogación,
realD es la dimensión horizontal de la imagen real,
imagenpxN − es el número de píxeles en la dirección horizontal de la imagen que capta la
cámara.
Se obtiene
mmd 4=
El desplazamiento máximo sería
mmdx 333,131 =⋅=∆

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
93
Así
v
xt
∆≈∆ =333,33 µs
Se toma un tiempo entre impulsos de 300 µs.
El tronco de adquisición de imágenes o set-up con el que se trabaja con FlowManager
tiene la siguiente presentación:
Figura 3.16. Tronco de adquisición
Cada tronco de adquisición alberga las 150 parejas de imágenes de la secuencia. Este
set-up pertenece a un proyecto determinado que podrá estar constituido de tantos set-ups
como sean necesarios. A su vez, el proyecto pertenece al “database” (cilindro azul) que
así mismo podrá albergar diversos proyectos.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
94
3.5 Tratamiento y análisis de datos
Para facilitar la interpretación de las medidas es necesario realizar el análisis de los
datos. A partir de las parejas de imágenes se realizan distintas operaciones matemáticas
que proporcionan resultados tangibles.
El software FlowManager proporciona al usuario una amplia librería de análisis. Cada
una de las operaciones elegidas se efectúa sobre la totalidad de las imágenes que forman
la secuencia. El objetivo de este análisis es obtener los perfiles de velocidades, tanto
numéricos como gráficos. Es la necesidad de obtener gráficos lo que induce a completar
el análisis con el uso de MATLAB. Así, se realizan unas operaciones previas contenidas
en FlowManager. Los resultados obtenidos se exportan a MATLAB y desde allí se
tratan para obtener los resultados deseados. Se describen a continuación las operaciones
realizadas:
3.5.1 Operaciones con FlowManager
El Procesador Flowmap 1501 se ha utilizado únicamente para la adquisición de la
secuencia de registros. Las operaciones realizadas, incluida la propia “Cross-
correlation”, se han llevado a cabo a posteriori y no durante la adquisición, como
hubiese sido posible utilizando la unidad de correlación del procesador.
La secuencia de análisis se ha realizado en multiselección, es decir, idéntica y
contemporáneamente para las 150 adquisiciones sucesivas de cada set-up. Ésta viene
integrada por las siguientes operaciones (la descripción teórica de las mismas viene
descrita en el Capítulo 2):

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
95
Cross-correlation
Los parámetros según los que se realiza son:
Área de interrogación
(píx* píx)
Solape horizontal y vertical (%)
Área de imagen activa
Distancia de la segunda área
de interrogación horizontal y
vertical (píxel)
Función ventana
Función filtro
64 x 64
75
75
El área captada al completo
0
0
Ninguna
Ninguna
Tabla 3.2. Parámetros impuestos para la cross-correlation
Hacer notar que en el capítulo anterior se recomendaba un tamaño del área de
interrogación para la cross-correlation de 32 x 32 píxeles, sin embargo en la práctica se
ha usado un área mayor dado a que experimentaciones anteriores han demostrado que es
válido y permite un ahorro computacional importante.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
96
La imagen resultante es la siguiente:
Figura 3.17. Cross-correlation, mapa de vectores bruto
Se puede observar como al tratarse de un “mapa de vectores bruto”, es decir, un mapa
de vectores donde aún no se han eliminado los vectores no válidos, están presentes
algunas irregularidades en el campo.
Validación (“Moving Average”)
Los vectores no válidos no se presentan en grupos, sino aislados. Es así posible aplicar
el método de validación “Moving Average” para uniformizar el campo de velocidades.
Además, en la cross_correlation se ha aplicado un gran solape (75%) necesario para
garantizar la validez de este método, como se ha explicado en el Capítulo 2.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
97
Los parámetros de la validación son siempre aquellos de una adquisición estándar:
Area de medida
(pixel×pixel)
Factor de aceptación α Número de
iteraciones
Opciones
Sustitución de los vectores no válidos.
5 x 5
0.1
3
Validación en el contorno
Tabla 3.3. Parámetros impuestos para la validación
Se ha elegido la opción de sustituir los vectores no válidos, si no hubiese sido así el
mapa de vectores aparecería con “agujeros” en el lugar de estos vectores. Se pueden ver
en verde los vectores que han sido sustituidos por este método en el lugar de aquellos no
válidos. La imagen se mejora considerablemente.
Figura 3.18. “Moving Average”, mapa de vectores

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
98
Filtro
Posteriormente se ha aplicado el filtro “Moving Average”, el único disponible en el
software FlowManager, para reducir el efecto del ruido y de esta manera cada vector ha
sido sustituido con el vector medio de un área circundante. El único parámetro que fijar
es el área media, fijada en 5 x 5 píxels.
Figura 3.19. Filtro, mapa de vectores

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
99
3.5.2 Análisis con MATLAB
Una vez realizado el filtrado del “mapa de vectores bruto” los datos se exportan a una
carpeta que es utilizada como base de datos por MATLAB. El análisis se realizará en
primer lugar para cada set-up, que constituye un conjunto de 150 pares de imágenes
correspondientes a una posición concreta de la cámara, posteriormente se unen los datos
de los cuatro set-ups que conforman la visión vertical completa del plano de estudio y
por último se procede al trazado del campo de velocidades. Cada carpeta contiene 150
archivos de extensión .txt los cuales contienen cuatro columnas de datos, una referida a
la coordenada x de cada vector, la otra a la coordenada y y las dos últimas a las
componentes horizontal y vertical del vector de velocidad en cada punto
respectivamente.
Se implementan varios programas para el tratamiento de los datos (Anexo B):
Crea_dati:
El programa genera un file donde se almacenan cuatro matrices llamadas: x, y, ufield y
vfield. Éstas contienen respectivamente los valores de la coordenada x, de la coordenada
y, de la componente horizontal de la velocidad y de la componente vertical para cada
uno de los puntos que distingue el FlowMap. El programa debe ejecutarse para cada una
de las carpetas de datos, es decir, para cada uno de los conjuntos de 150 archivos que se
correspoden con las distintas captaciones de la cámara, cuatro en total, generando así
cuatro files de datos de extensión .mat.
Analisi_foto:
Descarga los datos contenidos en cada uno de los archivos de extensión .mat generados
con el programa anterior. Para cada una de estas descargas se generan cinco matrices
que almacenan los datos correspondientes a la coordenada x, la coordenada y, la
componente horizontal de la velocidad media temporal, la componente vertical y el
módulo de ésta, para cada punto contenido en la imagen. Además se genera una matriz
que contiene el valor instantáneo del módulo de la velocidad en cada punto.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
100
Hacer notar que el programa debe reconstruir un perfil de velocidades mediante el
acoplamiento de cuatro imágenes, es necesario así manipular el valor de la coordenada
vertical en modo apropiado para generar las matrices anteriores.
Se representan conjuntamente el módulo medio de la velocidad y su valor instantáneo
para cada uno de los 150 tiempos, uniendo las cuatro matrices correspondientes. Esto es
posible gracias al comando hold.
Por último, el programa descarga los datos del archivo v_y.txt que contiene los
resultados obtenidos a partir de la simulación numérica mediante Fluent (datos
correspondientes a la coordenada vertical y al módulo medio de la velocidad en el
tiempo) y representa conjuntamente los perfiles medios de velocidad, el obtenido
experimentalmente y el numérico.
Repetición del experimento
Se realizan varias series de adquisiciones a una frecuencia del ventilador de 25 Hz. El
análisis de los resultados, las características del perfil y el nivel de turbulencia. Resultan
muy similares en todos los casos. Se adjuntan los resultados del experimento llamado “7
de Abril”.
Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
101
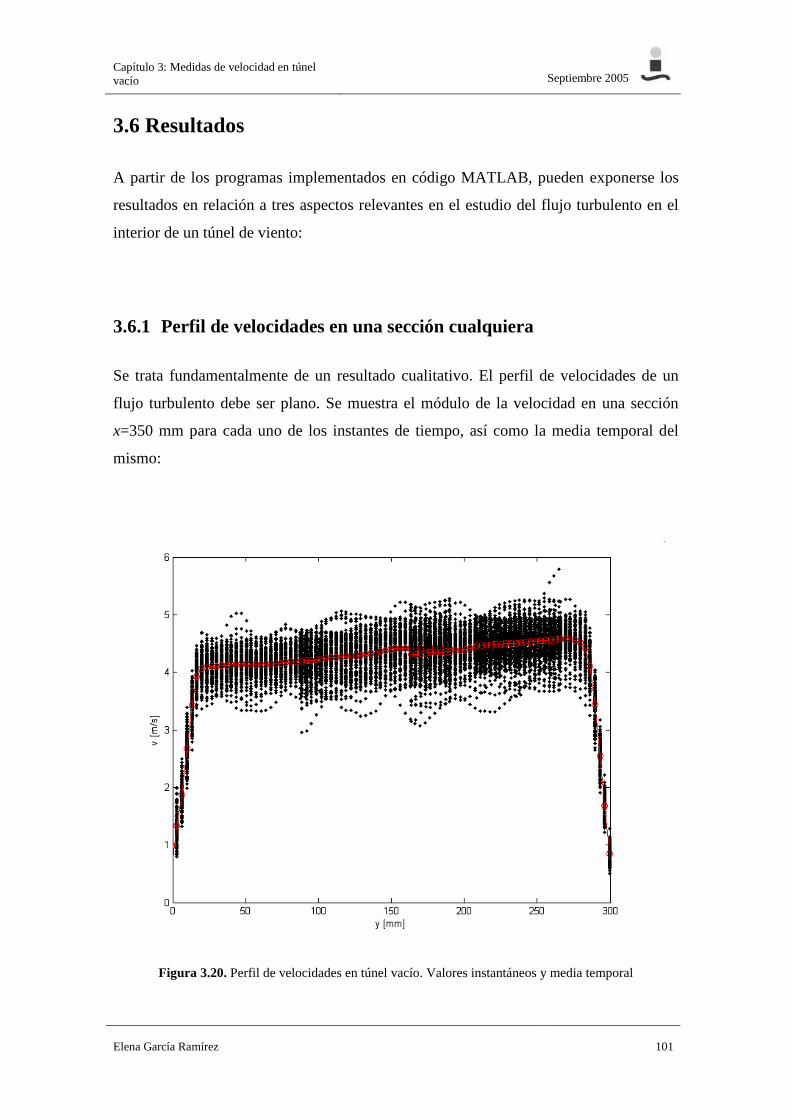
3.6 Resultados
A partir de los programas implementados en código MATLAB, pueden exponerse los
resultados en relación a tres aspectos relevantes en el estudio del flujo turbulento en el
interior de un túnel de viento:
3.6.1 Perfil de velocidades en una sección cualquiera
Se trata fundamentalmente de un resultado cualitativo. El perfil de velocidades de un
flujo turbulento debe ser plano. Se muestra el módulo de la velocidad en una sección
x=350 mm para cada uno de los instantes de tiempo, así como la media temporal del
mismo:
Figura 3.20. Perfil de velocidades en túnel vacío. Valores instantáneos y media temporal

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
102
Figura 3.21. Perfil medio de velocidades en túnel vacío
El perfil turbulento debe ser plano, es decir, la pendiente de la recta que lo define (en la
zona que excluye a la capa límite) debe ser nula. Sin embargo, los resultados obtenidos
son algo distintos:
La línea que define el perfil puede aproximarse a la recta:
)(
04.4002.0)(
mmy
yyv +=
Donde el dominio de y es aproximadamente (20,270). El valor medio de v(y) es de 4.33,
de modo que los valores extremos difieren de la media en un 5.77%.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
103
Cabe entonces preguntarse a qué es debida esta pendiente positiva y la asimetría en el
perfil, cuando no existe en la cámara de ensayos ningún elemento que pueda provocarlo.
La respuesta más inmediata es el hecho de que el perfil se crea a partir de cuatro
experimentos distintos. Toda medida tiene asociada un error experimental de carácter
aleatorio que es imposible corregir. De este modo, a cada conjunto de datos le
acompaña un error experimental distinto, que en este caso puede ser importante debido
al poco control en el sistema de sembrado.
A pesar de lo anterior, el perfil obtenido es considerablemente plano y así concordante
con el perfil típico turbulento.
El espesor de la capa límite en la sección de pruebas puede estimarse a partir de los
resultados obtenidos:
mm20≈δ
3.6.2 Intensidad turbulenta
Uno de los modos más comunes de validar un túnel de viento es la medida de la
intensidad turbulenta. Este parámetro viene representado por el cociente U
u', donde
u’representa la componente fluctuante del módulo de la velocidad y U el módulo medio
a la entrada.
Cuanto mayor sea este parámetro mayor es la turbulencia en el túnel, y por lo tanto
mayor la variabilidad de los resultados. En general, un túnel de viento está
correctamente diseñado cuando la intensidad turbulenta no supera el 1%.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
104
A continuación se representa el perfil )('
yU
u en una sección cualquiera de la cámara de
ensayos. Este perfil se ha obtenido a partir del programa turbulencia que determina el
valor medio temporal de u’ para cada uno de los valores de y, calculando la desviación
típica, excluyendo los valores que se desvían excesivamente de la media y recalculando
ésta. Esta nueva media es el valor de u’ que se representa.
Figura 3.22. Evolución de la turbulencia respecto a y
Es interesante hacer notar la evolución de la turbulencia en las zonas cercanas a la capa
límite. Existe un descenso importante del parámetro conforme la medida se aleja de la
zona de influencia de la capa límite. Las irregularidades en las paredes del túnel
introducen una turbulencia adicional que se manifiesta con un aumento del parámetro en
la capa límite. Esta turbulencia disminuye a medida que desaparece la influencia de esta
zona.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
105
Las aplicaciones del túnel de viento del DIENCA no están relacionadas con estudios de
la capa límite, de este modo son principalmente interesantes las medidas de turbulencia
en la zona central. Se excluye el análisis de la capa límite y la zona influenciada
directamente por ella, que se considera en aproximación del orden de ésta. Así, se
resumen los resultados en el dominio de y (40mm, 260mm).
Valor máximo Valor mínimo Valor medio
y =190.01mm y =84.32mm
2.19% 3.39%
2.96%
Tabla 3.4. Valores máximo, mínimo y medio de la intensidad turbulenta en la zona central del túnel
Como se ha dicho anteriormente, un túnel está correctamente diseñado cuando la
intensidad turbulenta es menor de un 1%. Los resultados obtenidos no son aceptables.
Esto puede deberse a dos causas, una relacionada con el error de medida; la otra, con el
diseño del túnel.
Si se tratase de un error de medida, cabría la posibilidad de que el túnel estuviese bien
diseñado a pesar de los resultados. Como se ha visto en el apartado anterior, existen
errores experimentales inevitables que se atribuyen a la puesta en marcha del sistema
PIV (principalmente en el sembrado). Existen también errores asociados a la captación
de las imágenes y a las operaciones estadísticas que se realizan para obtener el campo
de velocidades. Estos últimos errores, cuantificables, son aún un argumento abierto,
actualmente tema de investigación. La Dantec Dynamics tiene varios estudios sobre este
argumento y da un primer valor a este error [Ref.9]. A partir de la simulación de Monte
Carlo llevada a cabo por Kean y Adrian [Ref.10] se llega a una conclusión sobre el error
asociado a la técnica. El error de base (no se estudia la propagación de errores a partir
de los datos obtenidos por técnica PIV) en términos absolutos está en torno al 1%. De
este modo puede desecharse la idea de que existan errores importantes asociados al
sistema de medida.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
106
Sin embargo, existen grandes evidencias estructurales que hacen pensar que los
resultados obtenidos son precisamente producto del mal diseño del túnel. A
continuación se detallan los más destacables:
− Inexistencia de una cámara de remanso anterior al convergente. La cámara de
remanso se encarga de reducir la escala turbulenta propia del aire exterior que es
aspirado.
− Irregularidades en el honeycomb. El honeycomb es una de las piezas clave para
uniformizar el flujo, el hecho de que éste tenga pequeñas muescas o algunos de sus
orificios dañados,(como es el caso del panal con el que se trabaja en este
laboratorio),hace que pierda eficacia.
− Inexistencia de una malla tras el honeycomb. La malla es un elemento muy
común para uniformar el flujo del que no dispone el túnel del DIENCA.
− El perfil del convergente impide que el flujo exterior que circula cerca de los
límites de éste pueda entrar en el túnel fácilmente. Debido a la forma poco
aerodinámica de sus bordes, el flujo cerca de éstos sufre una pérdida de energía a la
entrada del túnel que se traduce en turbulencia. Existen otro tipo de conos de
contracción que facilitan el paso del flujo en los extremos, impidiendo así este
aumento de turbulencia.
− Irregularidades en las paredes del cono de contracción que incrementan la
turbulencia de la capa límite.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
107
3.6.3 Capa límite turbulenta
En este apartado se realiza un análisis de la capa límite turbulenta que se forma entre un
flujo de velocidad U0 y un plano. Este flujo es en aproximación comparable a
cualquiera de las paredes de la cámara de ensayos del túnel de viento. El estudio se
desarrolla a partir de los trabajos realizados por Champagne, F.H. [Ref.11] Sea x la
coordenada coincidente con la dirección del flujo, y la coordenada transversal, y z la
coordenada homogénea (es decir, la coordenada según la cual el flujo es invariable). La
dimensión característica del flujo δ(x) puede definirse según el perfil medio de
velocidades < U(x,y,z)>, que es independiente de z.
Se define
<U(x,yα(x),0)>= α U0 (3.1)
y
δ(x)=y0.9(x)-y0.1(x) (3.2)
Se define además una dimensión vertical
yl(x)=0.5(y0.9(x)+y0.1(x)) (3.3)
a partir de la cual se define ξ, que representa la coordenada y adimensional:
ξ=(y-yl(x))/ δ(x) (3.4)
y la velocidad adimensionalizada vendrá dada por
f(ξ)=(<U>- 0.5 U0)/U0 (3.5)
Los perfiles de velocidad adimensionalizados según las ecuaciones (3.4) y (3.5) se
superponen para medidas realizadas a distintas distancias de la sección de ingreso.
Puede demostrarse que la función f(ξ) satisface la ecuación de Navier- Stokes para la
parte fluctuante con la hipótesis de viscosidad turbulenta uniforme.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
108
Se obtiene que:
=−= ∫ 2
erf2
1d)
2
1exp(
2
1)( 22
0 σξζσζ
πσξ
ξf
(3.6)
Imponiendo un resultado experimental f(0.5)=0.4 se obtiene el valor de la constante σ :
3092.02 =σ
Gráficamente f(ξ) :
Figura 3.23. Perfil de velocidad adimensional en función de la coordenada y adimensional
A partir del programa uc_1 se representan los valores de velocidad adimensionales
frente a aquellos de ξ . Esto se realiza para varias distancias de la sección de entrada
sólo en la zona del perfil que interesa, es decir en la región donde se forma la capa
límite, se hace uso por tanto sólo de la imagen 1. Se obtiene el siguiente gráfico:

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
109
Figura 3.24. Comparación de los perfiles de velocidad adimensionales en función de la coordenada y
adimensional experimentales y teórico
Hay que hacer notar que el número de datos que se tienen en la capa límite es muy
escaso. Esto es debido a los problemas de la captación de imágenes en las zonas
limítrofes con las paredes superior e inferior de la cámara de ensayos, como ya se ha
dicho, debido al reflejo de éstas. Por tanto, se dispone sólo de los datos que pueden
considerarse buenos y que en este caso son 6. Así, no puede realizarse un estudio
amplio y detallado sobre la capa límite en el túnel, aunque tampoco es relevante en este
estudio. Sin embargo, el hecho de que los pocos datos con los que se cuentan sigan el
perfil adimensional obtenido de los trabajos de Champagne, F.H es importante para la
validación del túnel, puesto que siguen la tendencia teórica adecuada, y por tanto, las
medidas tomadas son válidas.

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
110
Este tipo de análisis adimensionales ofrece una ventaja importante, puesto que permite
realizar una comparación con experimentos muy diversos, no siendo necesario así
centrarse en un número de Reynolds concreto ni en unas dimensiones de la estructura
determinadas.
3.6.4 Simulación numérica con Fluent [Ref.12]
Un modo de comprobar la bondad de los resultados es la comparación con los
resultados obtenidos a partir de la simulación numérica con Fluent.
Se reconstruye la geometría bidimensional del túnel: el convergente a través de la
ecuación que describe el perfil (Capítulo 1) y la cámara de ensayos. Se imponen las
condiciones de contorno del tipo: mass-flow-inlet, wall y out-flow. Se impone una
velocidad al ingreso de 1,333 m/s, calculada a partir de la conservación de la masa
imponiendo una velocidad media en la cámara de ensayos de 4 m/s. Se realiza la
simulación en la entrada de la cámara de ensayos, para un x=0, según los ejes
coordenados impuestos en el apartado de la experimentación. Los resultados obtenidos
se muestran en la siguiente figura:
Figura 3.25. Perfil de velocidades a partir de simulación numérica con Fluent

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
111
Se comparan los perfiles de velocidades obtenidos experimentalmente y por simulación
numérica:
Figura 3.26. Comparación del perfil de velocidades obtenido experimentalmente y por simulación
numérica
La aproximación de ambos gráficos es a simple vista importante.
El perfil de velocidades en la zona que excluye la capa límite puede representarse en
cada caso de forma aproximada como:
Perfil experimental:
)/(
)(
04.4002.0)(
smv
mmy
yyv +=

Capítulo 3: Medidas de velocidad en túnel vacío Septiembre 2005
Elena García Ramírez
112
Perfil numérico:
)/(
041.4)(
smv
yv =
De modo que la diferencia máxima se da en el punto y=270 mm, en el que el valor
experimental difiere del numérico en un 13%. La diferencia media es de un 7%,
resultado aceptable.





![tema7-07-imprimir.ppt [Modo de compatibilidad] · Tema 7 POTENCIA EN CIRCUITOS MONOFÁSICOS Tema 7: POTENCIA EN CIRCUITOS MONOFÁSICOS 7.1.- Potencia instantánea, media y fluctuante](https://static.fdocumento.com/doc/165x107/605f80a29e7d323a4526163f/tema7-07-modo-de-compatibilidad-tema-7-potencia-en-circuitos-monofsicos-tema.jpg)