Capitulo IV. Comunicación del...
19
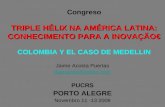
39 Capitulo IV. Comunicación del diseño 4.1 Ensamble y construcción del cuadricoptero Esta es la última etapa del modelo de diseño a cinco pasos y representa la parte más importante en la cual se conjunta todo lo que se ha trabajado anteriormente. La parte más importante del proceso de diseño es la construcción misma del proyecto. Para ensamblar correctamente la plataforma se necesita realizar un plan de ensamble para facilitar el trabajo y si se desea desarmar posteriormente sea una tarea más sencilla. Figura 4.1. Ensamble de la estructura (Explode state)
Transcript of Capitulo IV. Comunicación del...

39
Capitulo IV. Comunicación del diseño
4.1 Ensamble y construcción del cuadricoptero
Esta es la última etapa del modelo de diseño a cinco pasos y representa la parte más
importante en la cual se conjunta todo lo que se ha trabajado anteriormente. La parte más
importante del proceso de diseño es la construcción misma del proyecto. Para ensamblar
correctamente la plataforma se necesita realizar un plan de ensamble para facilitar el trabajo
y si se desea desarmar posteriormente sea una tarea más sencilla.
Figura 4.1. Ensamble de la estructura (Explode state)

40
4.2 Listado de partes
A continuación se muestra la estructura:
Componentes electrónicos:
Placa superior (1) Placa inferior (2) Eje principal (1)
Eje secundario (2) Patas (8) Soporte (8)
Batería (1) ESC 30 A(4) Motor (4)
Hélice (4) Placa de distribución (1) Adaptador motor (4)

41
4.3 Plan de ensamble de la estructura
A continuación se muestra en imágenes el plan de ensamblaje:
Identificar y separar las distintas piezas con sus respectivos tornillos.
Colocar los tornillos en los soportes de lado del barreno hacia el lado con
rosca (para poder ajustar).
Insertar en el tubo principal a la altura donde se ensamblará con la placa principal y apretar el tornillo.
Atornillar hasta fijar completamente la barra. Es necesario apoyarse con
una superficie plana.
Colocar la placa superior , atornillar con una llave allen y colocar las
tuercas de seguridad.
Asegurar los tornillos para que queden completamente fijos.
1
6 5
4 3
2

42
Repetir el paso 3 con los ejes pequeños, asegurándose que estén
a la distancia correcta .
Colocar el coporte para unir la placa superior con el tubo y el soporte.
Para asegurar completamente los ejes pequeños a la base es necesario
utilizar rondanas y cilindros.
Repetir el paso 8 con el eje faltante y colocar el cilindro y la rondana para
fijar completamente.
Colocar la placa inferior en los tornillos de manera que esta sea perpendicular al eje mas largo.
Apretar la placa inferior con las respectivas tuercas.
9
8 7
10
12 11

43
Con este breve plan de ensamble es posible completar la estructura del cuadricoptero. El
siguiente paso es el ensamble de los componentes electrónicos, lo que representa una nueva
serie de pasos a seguir para la correcta colocación de los componentes.
Para ensamblar las patas al resto de la estructura es necesario unirlas con un
buje.
Posteriormente se coloca el soporte como se muestra en la imagen y se
coloca el tornillo (sin apretar todavía).
Se inserta el soporte en uno de los ejes y apoyándose con una superficie plana
para nivelarlo.
Se repite el paso 15 con los ejes restantes para completar el ensamble del
cuadricoptero.
14 13
16 15

44
4.4 Peso completo del cuadricoptero
Es necesario saber cuál es el peso de la estructura completa, para poder tener una idea de
cuánta corriente tiene que demandar el ESC para levantar la estructura, a continuación se
muestran una serie de tablas con el peso de cada pieza y componente electrónico del
cuadricoptero.
Parte de la estructura Peso (gr)
Placa superior 25.4
Placa inferior 16.6
Eje principal 26
Eje secundario (2) 12
Soporte motor (8) 6.6
Soporte estructura (8) 4
Adaptador motor (4) 5
Total 169.8 Tabla 4.1. Pesos de las partes de la estructura
Componente electrónico Peso (gr)
Batería 164.8
ESC (4) 4
Motor (4) 56.1
Hélice (4) 12.4
Placa distribución 2
Total 456.8 Tabla 4.2. Peso de los componentes electrónicos
Peso (gr)
Peso total del cuadricoptero 621.6 Tabla 4.3. Peso total del cuadricoptero

45
4.5 Instalación electrónica
Colocar los componentes electrónicos es una tarea que debe realizarse con mucho cuidado
y tomando en cuenta las características tanto de los componentes, como de la estructura, ya
que no se pueden permitir ensambles que dejen fallas posteriores como son los cortos
circuitos que pueden dañar seriamente algunos de los componentes.
Antes de agregar los componentes electrónicos es necesario familiarizarse con la posición
que tendrán los componentes en la estructura.
4.5.1 Instalación Motores
Montar los motores brushless en los adaptadores que permiten su colocación en distintas
estructuras. Primero se utilizan tornillos allen cónicos para montar el motor y esconder la
cabeza de los tornillos en los avellanados de los adaptadores, se necesita atornillar con
mucho cuidado ya que un mínimo contacto entre el tornillo y el devanado interno del motor
puede provocar un corto en el motor.
Figura 4.2. Montaje de los adaptadores del motor.

46
Colocar los adaptadores en los soportes de cada uno de los ejes utilizando tornillos planos
de menor radio y fijar completamente.
Figura 4.3. Fijación de los adaptadores con los ejes.
4.5.2 Instalación de los controladores de velocidad
Para conectar los controladores de velocidad se implementa una tarjeta de distribución
hecha de fibra de vidrio para minimizar el uso de cables y tener una conexión más
ordenada. Se designa un extremo de la placa positivo y el otro negativo para posteriormente
soldar cada uno de los cables de alimentación de los controladores en la placa.
Figura 4.4. Soldado de los controladores de velocidad.

47
Con la estructura completamente ensamblada se coloca la placa de distribución en el centro
de la estructura utilizando cinta doble de uso industrial para fijar la placa completamente y
evitar el contacto entre esta y la placa superior de la estructura debido a que la fibra de
carbono es un material conductor y un mínimo contacto puede generar un corto circuito.
Gracias a la soldadura en los extremos de la tarjeta se evita crear tensión en la conexión de
los controladores con los motores.
Figura 4.5. Montaje de la placa de distribución
Los motores se conectan a los controladores de velocidad mediante una conexión trifásica.
Para conectar los cuatro motores a sus respectivos controladores es necesario tomar en
cuenta que cada motor debe de girar en sentido inverso a su motor adyacente para crear un
contra torque y poder estabilizar la estructura durante el vuelo. Para poder invertir el
sentido de giro del motor solamente es necesario invertir los dos últimos cables en la
conexión.

48
Figura 4.6. Sentido de giro de los motores para generar un contra torque
4.5.3 Instalación de las Hélices
Las hélices utilizadas han sido previamente balanceadas durante su fabricación y están
listas para montarse. Se debe tener precaución con el montaje ya que para obtener un
correcto funcionamiento es necesario tomar en cuenta la inclinación de la hélice. Para que
una hélice genere empuje en conjunto con un motor, esta debe de empujar el aire hacia
abajo. Por esto las hélices vienen con dos orientaciones distintas.
Figura 4.7. Sentido de giro e inclinación de la hélice.

49
La instalación de las hélices en los motores es relativamente fácil, solo hay que fijar con el
cono que tiene el motor. Es necesario fijarse en la colocación de la hélice ya que el
fabricante manda un par de hélices con una inclinación y un par de hélices con la
inclinación contraria con el fin de que estas giren en sentidos opuestos y puedan generar un
empuje.
Figura 4.8. Montaje de las hélices.
4.5.4 Instalación de la Batería
La batería se encargará de alimentar los controladores de cada motor y el controlador de
vuelo. La batería LiPo se coloca en la placa inferior de la estructura. Para conectar la
batería a la placa de distribución se utilizan conectores XT60 que aseguran una conexión
segura entre la batería y la placa de distribución.

50
Figura 4.9. Soldado de los conectores XT60 con los cables de alimentación.
Posteriormente se cortan los excedentes de los tornillos de la placa inferior para evitar
cualquier contacto con la batería que pueda ocasionar algún corto. La batería se coloca a lo
largo de la placa inferior con el uso de cinta de montaje de velcro.
Figura 4.10. Montaje de la batería en la placa inferior

51
4.6 Resultados y Pruebas
Para poder llevar a cabo las pruebas al cuadricoptero es necesario llevar a cabo la
instalación electrónica correctamente. Uno de los objetivos del proyecto es el correcto
funcionamiento de los componentes electrónicos en conjunto y eso se puede comprobar
mediante las siguientes pruebas descritas.
4.6.1 Programación y calibración de los controladores de velocidad
Para poder realizar las primeras pruebas con el cuadricoptero completo es importante
conectar la batería con los controladores de motor. Esto resulta muy sencillo ya que la
conexión se realiza directo de la placa de distribución, designando los cables positivos
(rojos) y negativos (negros).
La calibración del controlador electrónico de velocidad corresponde a establecer las
velocidades máxima y mínima del motor en relación con la señal PWM generada por el
arduino. Como bien sabemos la señal PWM es una señal digital con valores de 5 V o 0 V
con una frecuencia especifica.
Figra 4.11 Señales de muestra PWM con distintos ciclos de trabajo
El controlador de motor cuenta con tres cables para la señal digital en la parte de en medio.
Un cable amarillo para la señal PWM, uno café para la tierra y un cable rojo en medio que
ofrece 3.3 V regulados.

52
Figura 4.11. Cables del ESC para la señal digital
Fuente: disponible en: http://wiki.dji.com/en/index.php/ESC
Para obtener una señal PWM para controlar los motores se utilizó un Arduino. Realizando
una investigación en la librería de Arduino, se encontró que existe una librería para poder
controlar motores brushless, la librería servo. La base del funcionamiento de esta librería es
que el controlador de velocidad regula la velocidad del motor dependiendo del ancho de
pulso de la señal, es decir, el tiempo en que la señal este en ON.
La conexión del controlador debe ser la siguiente:
- Cable naranja: El cable de señal debe de ser conectado a un pin digital PWM de la
placa de Arduino (pines 3, 5, 6, 9, 10, 11, 13).
- Cable café: El cable de tierra debe de ser conectado al pin de tierra (gnd) de la placa
de Arduino.
- Cable rojo: Este cable de alimentación ofrece 3.3 V regulados que en este caso no se
utilizará y se dejará sin conexión.
Para comenzar a utilizar los motores es necesario realizar una calibración previa del
controlador de velocidad para que este pueda sintetizar el rango de la velocidad del motor.
Mediante varias pruebas se encontró que el rango de señal de funcionamiento del
controlador de velocidad es de 1200 a 1900 microsegundos. Esta señal es generada con la
función Writemicroseconds(). El procedimiento para terminar la calibración es simple,
mandar la señal máxima con una duración de 1900 µs al ESC por medio del Arduino hasta
que el motor haga un sonido de confirmación y después enviar la señal mínima con una

53
duración de 1200 µs, inmediatamente el motor emitirá una serie de sonidos para confirmar
la calibración.
Esta es la conexión que se realiza para las primeras pruebas para controlar el motor
Brushless, se utiliza una placa de Arduino Leonardo que funciona a una frecuencia de 50
Hz, mientras que el ESC funciona en un rango de 30 a 450 Hz.
Figura 4.12. Esquema de conexiones para el ESC (modelo Fritzing)
Es necesario identificar los pines digitales que generen una señal PWM. En el Arduino
Leonardo estos pines tienen el siguiente símbolo ˜. Mientras que en el código del programa
es necesario destinar a un pin PWM la salida y conectarlo directamente. Este es el código
de la función writeMicroseconds() utilizado para controlar los motores.

54
#include <Servo.h>
Servo miservo;
void setup()
{
miservo.attach(9);
miservo.writeMicroseconds(1500);
}
void loop() {}
Código en Arduino para controlar un motor brushless.
Fuente: http://arduino.cc/en/Reference/ServoWriteMicroseconds
4.6.2 Prueba de empuje
Después de la calibración se realizan varias pruebas con los motores utilizando diferentes
valores de la función. Eso es cambiar la frecuencia de la señal PWM que se envía al ESC y
es cuando el motor demanda más o menos corriente dependiendo de la fracción de tiempo
en que la señal PWM este en ON.
El principal objetivo de estas pruebas es conocer cuánto empuje se puede tener en un
motor. Para esto, se utiliza una báscula digital y se atornilla el motor a un bloque de
madera para conocer el empuje que el motor genera a distintos valores de micro segundos.
Delay del servo (µs) Empuje (gr)
1100 0
1200 50
1300 106
1400 190
1500 245
1600 310
1700 370
1800 442
1900 530
2000 530 Tabla 4.4. Empuje del motor a diferentes grados.

55
Para apreciar mejor los valores obtenidos con las pruebas de empuje se ingresaron los datos
a una gráfica:
Figura 4.13. Gráfica de la prueba de empuje de cada motor
En la gráfica se puede observar con facilidad como a medida que se incrementa el ancho de
pulso en microsegundos va incrementando el empuje del motor. A medida de que este
empuje incrementa el motor demanda más y más corriente por medio del ESC. La
capacidad máxima del ESC es de 30 A, y esto se puede observar cuando se aumenta a más
de 1900 µs el valor del ángulo ya que el empuje no aumenta a partir de ese valor, por lo
que se llega a conclusión de que el motor está llegando a los 30 A.
El siguiente paso es aplicar la misma señal PWM a los cuatro motores para que estos
trabajen en sincronía. Debido a que no se está diseñando un sistema de control óptimo para
poder realizar vuelos controlados, no se necesita una señal PWM para cada motor. Por esto,
se conecta la señal PWM del Arduino a una línea de protoboard y la señal se manda a cada
0
100
200
300
400
500
600
1200 1300 1400 1500 1600 1700 1800 1900 2000
Emp
uje
(gr
)
Delay del servo (µs)
Prueba de empuje

56
ESC. La conexión de los cuatro motores, con la placa de distribución y el arduino se puede
apreciar en el siguiente modelo.
Figura 4.14. Modelo de la conexión de los cuatro motores con el Arduino (modelo Fritzing).
Al llevar este modelo al cuadricoptero físicamente se tiene que hacer cuidadosamente. Es
necesario utilizar cinta doble cara para fijar el Arduino a la placa de distribución y al mismo
tiempo aislarlos. Así mismo la placa de distribución se encuentra aislada del resto de la
estructura porque hay que recordar que la fibra de carbono es un material conductor.

57
Figura 4.15. Montaje de la placa de Arduino sobre la placa de distribución.
Las conexiones se realizaron con cables jumper tipo macho para así evitar el uso excesivo
de cables largos que puedan generar problemas en el vuelo y en la portabilidad. Debido a
que el Arduino Leonardo cuenta con un regulador de voltaje que permite un voltaje de
entrada de 5 a 12 V, es posible alimentarlo con la misma batería que proporciona un voltaje
no mayor a los 11.1 V. Así que se soldaron dos cables desde la placa de distribución para
alimentar el Arduino y no depender así de un cable de alimentación.