Capítulo 5. Generación del modelo de elementos finitos...
13
Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla Página 58 Capítulo 5. Generación del modelo de elementos finitos (FEM)
Transcript of Capítulo 5. Generación del modelo de elementos finitos...

Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 58
Capítulo 5. Generación del modelo de elementos finitos (FEM)

Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 59
5.1. Operaciones booleanas en los discos
El modelo importado en formato IGES desde Solid Edge está formado por las vértebras y los discos. El volumen de éstos últimos interfiere en el cuerpo vertebral tal y como se ha explicado anteriormente. Para conseguir que la superficie de contacto de los discos coincida con la de los cuerpos vertebrales, se realiza una serie de operaciones booleanas de sustracción entre volúmenes, restando el volumen de las vértebras al de los discos completos.
Para ello, se elige la herramienta de operaciones boolenas dentro de ANSYS Workbench, Se seleccionan los discos como objetos a los que se va a sustraer volumen, y las vértebras para definir dicha sustracción.
A modo de ejemplo ilustrativo se muestra el resultado de esta operación en el disco intervertebral entre la vértebra C2 y la C3:
Figura nº 44: Ejemplo del resultado de la sustracción booleana entre discos y vértebras.

Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 60
5.2. Parámetros de modelado con EM
Parámetros del modelo completo:
Dimensiones totales
Longitud X 8,089e-002 m
Longitud Y 9,9222e-002 m
Longitud Z 7,428e-002 m
Volumen 6,4424e-005 m³
Estadísticas del modelo
Cuerpos 12
Cuerpos activos 12
Nodos 81377
Elementos 39802
Tabla 1: Parámetros del modelo completo.
Parámetros de las vértebras y los discos:
Nombre C1 C2 D2-3 C3
Material Hueso Hueso Disco Hueso
Dimensiones totales (Bounding Box)
Longitud X 8,089e-002 m 5,3775e-002 m 1,7738e-002 m 5,2003e-002 m
Longitud Y 1,7985e-002 m 3,3004e-002 m 6,2641e-003 m 2,1533e-002 m
Longitud Z 4,6099e-002 m 5,0754e-002 m 1,2228e-002 m 4,7299e-002 m
Volumen 7,3135e-006 m³ 1,2811e-005 m³ 3,5059e-007 m³ 7,2685e-006 m³
Estadísticas del modelo
Nodos 14266 9230 2239 7148
Elementos 7156 4844 994 3480
Tabla 2: Parámetros geométricos y de malla de las vértebras y discos.

Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 61
Nombre D3-4 C4 D4-5 C5
Material Disco Hueso Disco Hueso
Dimensiones totales
Longitud X 1,7566e-002 m 5,3483e-002 m 2,0185e-002 m 5,7499e-002 m
Longitud Y 6,4934e-003 m 1,8647e-002 m 7,9506e-003 m 2,2759e-002 m
Longitud Z 1,4219e-002 m 4,2289e-002 m 1,2955e-002 m 4,5055e-002 m
Volumen 3,5671e-007 m³ 6,9699e-006 m³ 4,2068e-007 m³ 7,9848e-006 m³
Estadísticas del modelo
Nodos 2584 7379 1832 9183
Elementos 1177 3574 793 4447
Tabla 3: Parámetros geométricos y de malla de las vértebras y discos (continuación)
Nombre D5-6 C6 D6-7 C7
Material Disco Hueso Disco Hueso
Dimensiones totales
Longitud X 2,247e-002 m 5,5488e-002 m 2,3265e-002 m 6,5446e-002 m
Longitud Y 8,2661e-003 m 2,2785e-002 m 9,5567e-003 m 2,8846e-002 m
Longitud Z 1,3452e-002 m 5,5398e-002 m 1,3957e-002 m 6,2597e-002 m
Volumen 6,8635e-007 m³ 8,097e-006 m³ 9,3841e-007 m³ 1,1226e-005 m³
Estadísticas del modelo
Nodos 3043 9938 3465 11070
Elementos 1363 4759 1654 5561
Tabla 4: Parámetros geométricos y de malla de las vértebras y discos (continuación)

Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 62
En las siguientes tablas se detallan todos los parámetros de las zonas de contacto entre vértebras y entre vértebras y discos. La selección de las facetas en contacto se realiza manualmente.
Objeto C7/D6-7 C2/D2-3 D2-3/C3 C1/C2 C6-D6-7
Estado Completamente definido
Selección
Método de selección Selección manual
Facetas en cuerpo principal 79 40 39 113 68
Facetas en Objetivo 85 40 39 89 68
Cuerpo principal c7 d2-3 d2-3 c1 d6-7
Cuerpo objetivo d6-7 c2 c3 c2 c6
Definición
Tipo Fijado
Modo de creación del contacto Automático
Tabla 5: Zonas de contacto entre cuerpos.
Objeto D5-6/C6 C5/D5-6 D4-5/C5 C4/D4-5 D3-4/C4
Estado Completamente definido
Selección
Método de selección Selección manual
Facetas en cuerpo principal 75 53 50 36 46
Facetas en Objetivo 76 53 50 36 46
Cuerpo principal C6 D5-6 C5 D4-5 C4
Cuerpo objetivo D5-6 C5 D4-5 C4 D3-4
Definición
Tipo Fijado
Modo de creación del contacto Automático
Tabla 6: Zonas de Contacto entre cuerpos (continuación).

Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 63
Objeto C3-D34
Estado Completamente definido
Selección
Método de selección Selección manual
Facetas en cuerpo principal 41
Facetas en Objetivo 41
Cuerpo principal C3
Cuerpo objetivo D3-4
Definición
Tipo Fijado
Modo de creación del contacto Automático
Tabla 7: Zonas de contacto entre cuerpos (continuación).
Figura nº 45: Ejemplo de definición del contacto entre superficies en ANSYS

Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 64
5.3. Parámetros del análisis de EM
Malla El mallado, cuyos datos se han presentado en la tabla anterior, se
ha realizado siguiendo los pasos de ANSYS Workbench. En este punto, la versión Workbench tiene un uso más simple que la versión clásica, puesto que el software tiene un asistente que pide al usuario las características del modelo, y elige los parámetros avanzados como el tipo de elemento más adecuado, o el algoritmo de mallado más eficiente.
Para este proyecto se han probado distintos tipos de malla, y la opción más eficiente ha sido la denominada por el programa como “Coarse” (gruesa). Mayores densidades de malla no dan un resultado significativamente distinto, pero emplea un tiempo mucho mayor para la resolución del modelo.
Definiendo únicamente los parámetros del tipo de elemento (solid) y el tamaño de malla, este es el mallado realizado por ANSYS.
Figura nº 46: Malla del modelo de elementos finitos.
Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 65
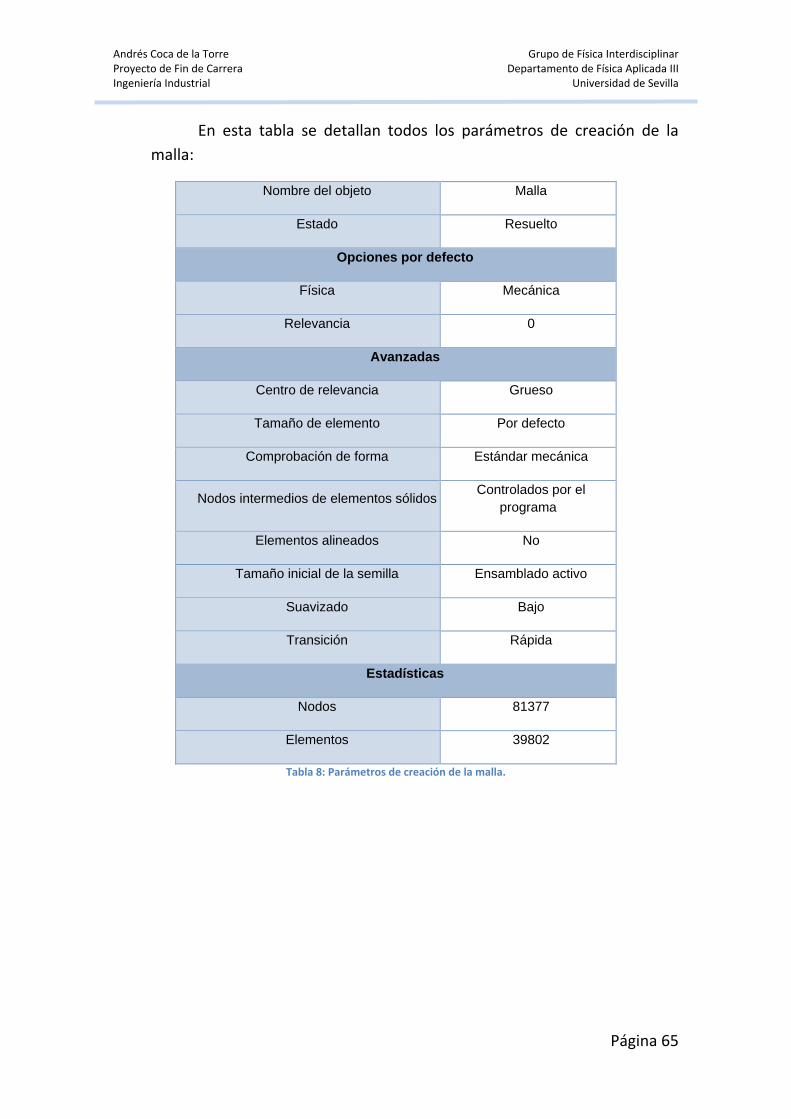
En esta tabla se detallan todos los parámetros de creación de la malla:
Nombre del objeto Malla
Estado Resuelto
Opciones por defecto
Física Mecánica
Relevancia 0
Avanzadas
Centro de relevancia Grueso
Tamaño de elemento Por defecto
Comprobación de forma Estándar mecánica
Nodos intermedios de elementos sólidos Controlados por el programa
Elementos alineados No
Tamaño inicial de la semilla Ensamblado activo
Suavizado Bajo
Transición Rápida
Estadísticas
Nodos 81377
Elementos 39802
Tabla 8: Parámetros de creación de la malla.

Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 66
Tipo de análisis
En la siguiente tabla se detallan los parámetros elegidos en la definición del análisis mecánico:
Nombre del objeto Análisis estático estructural
Estado Completamente definido
Definición
Física Mecánica
Tipo de análisis Estructural Estático
Tabla 9: Definición del análisis FEM.
Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
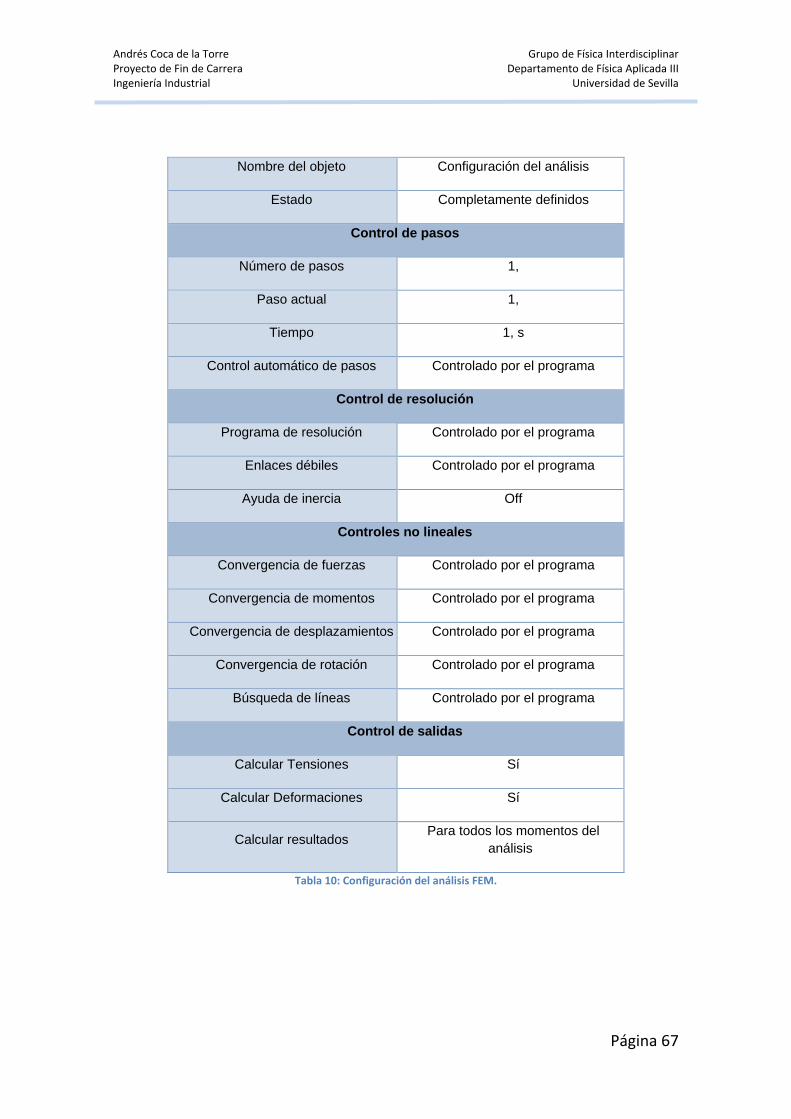
Página 67
Nombre del objeto Configuración del análisis
Estado Completamente definidos
Control de pasos
Número de pasos 1,
Paso actual 1,
Tiempo 1, s
Control automático de pasos Controlado por el programa
Control de resolución
Programa de resolución Controlado por el programa
Enlaces débiles Controlado por el programa
Ayuda de inercia Off
Controles no lineales
Convergencia de fuerzas Controlado por el programa
Convergencia de momentos Controlado por el programa
Convergencia de desplazamientos Controlado por el programa
Convergencia de rotación Controlado por el programa
Búsqueda de líneas Controlado por el programa
Control de salidas
Calcular Tensiones Sí
Calcular Deformaciones Sí
Calcular resultados Para todos los momentos del análisis
Tabla 10: Configuración del análisis FEM.

Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 68
Condiciones de contorno (Loads)
Se definen dos condiciones de contacto: Una fuerza de 100 N en la componente negativa del eje Y y un apoyo elástico bajo la vértebra C7 con una rigidez similar a la del disco intervertebral.
Nombre del objeto Soporte elástico Fuerza
Estado Completamente definida
Selección
Método de selección Manual
Geometría 58 facetas 45 facetas
Definición
Tipo Apoyo elástico Fuerza
Suprimida No
Rigidez del apoyo 4,2e+006 N/m2
Definida por Componentes
Componente X 0 N (en rampa)
Componente Y -100 N, (en rampa)
Componente Z 0 N (en rampa)
Tabla 11: Condiciones de contorno.

Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 69
Rampa de aplicación de la fuerza
Figura nº 47: Gráfico temporal de aplicación de la fuerza.
Andrés Coca de la Torre Grupo de Física Interdisciplinar Proyecto de Fin de Carrera Departamento de Física Aplicada III Ingeniería Industrial Universidad de Sevilla
Página 70
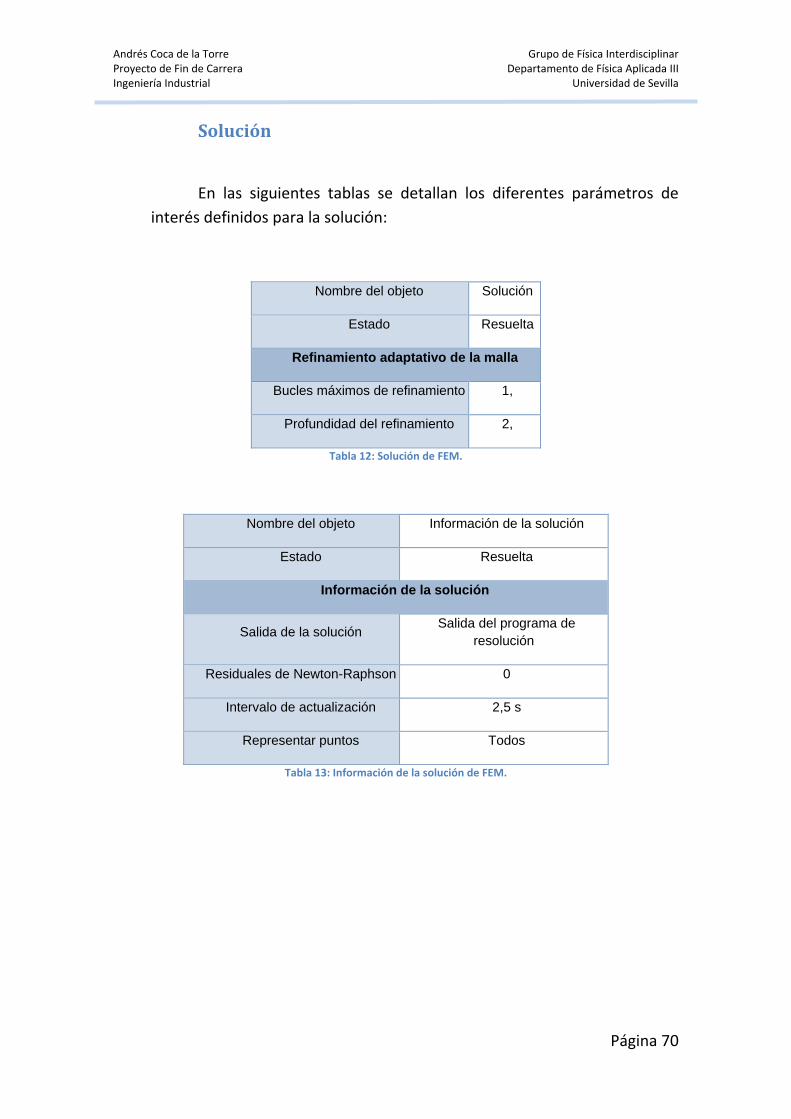
Solución
En las siguientes tablas se detallan los diferentes parámetros de interés definidos para la solución:
Nombre del objeto Solución
Estado Resuelta
Refinamiento adaptativo de la malla
Bucles máximos de refinamiento 1,
Profundidad del refinamiento 2,
Tabla 12: Solución de FEM.
Nombre del objeto Información de la solución
Estado Resuelta
Información de la solución
Salida de la solución Salida del programa de resolución
Residuales de Newton-Raphson 0
Intervalo de actualización 2,5 s
Representar puntos Todos
Tabla 13: Información de la solución de FEM.


















