CENTRO NACIONAL DE INVESTIGACION Y DESARROLLO … · MIENTO Y MANIPULACION DE PIEZAS DE ENSAMBLE...
101
S. E. P. S. E. I. T. D. G. I. T. ~ CENTRO NACIONAL DE INVESTIGACION Y DESARROLLO TECNOLOGICO Implementación de un Sistema de Visión para la Detección, Reconoci - miento y Manipulación de Piezas de Ensamble por Medio de un Robot de uso Industrial - Que para obtener el grado de: MAESTRO EN CIENCIAS DE LA COMPUTACION PRESENTA: CUERNAVACA,' MOR. DICIEMBRE DE 1991
Transcript of CENTRO NACIONAL DE INVESTIGACION Y DESARROLLO … · MIENTO Y MANIPULACION DE PIEZAS DE ENSAMBLE...
-
S. E. P. S. E. I . T. D. G. I. T. ~
CENTRO NACIONAL DE INVESTIGACION Y DESARROLLO TECNOLOGICO
Implementación de un Sistema de Visión para la Detección, Reconoci- miento y Manipulación de Piezas de Ensamble por Medio de
un Robot de uso Industrial
- Que para obtener el grado de:
M A E S T R O E N C I E N C I A S DE L A C O M P U T A C I O N P R E S E N T A :
CUERNAVACA,' MOR. DICIEMBRE DE 1991
-
s@o'SiSTEMA NACIONAL DE INSTITUTOS TECNOLOGICOS II
mtro Nacional de Investigación y Desarrollo Tecnológica I1
ACADEMlA DE LA MAESTRIA EN ClENCIAS DE LA COMPUTACION 11
,Cuernavaca, Mor., a 26 de noviembre de 1991
Or. Juan Manuel Ricaño Castilllo Director del CENIDET P r e s e n t e :
At'n: Ing. Reyes Hernández Oiaz Coord. de Computación
Por este conducto hacemos de su conocimiento que, después de haber sometido a re- visión el trabajo de tesis titulado "IMPLEMENTACION DE UN SISTEMA DE VISION PARA LA DETECCION, RECONOCIMlENTO Y MANIPULACION DE PIEZAS DE ENSAMBLE POR MEDIO DE UN ROBOT DE USO INDUSTRIAL", desarrollado por el lng.. ARTURD IGLESIAS ZARATE y ha - biendo cumplido con todas las correcciones que se le indiCaron, estamos de acuer do en que se le conceda la autorización de impresión de la tesis y la fecha de e: xamen de grado.
Sin otro particular, quedamos de usted.
A T E N T A M E N T Rev i sora.
Iiilerior Iniernndo Paiinira S/N C.P. 62490: Apartado Posial 4 22) C.P. 62431 Cucrnnvaca. híor. hlfxico
?'cl.(73) 1 0 7 7 4 1 y ( 7 3 ) 1 2 . 7 6 13 w
-
mtro Nacional de Investigación y Desarrollo Tecnológico
DIRECCION COORD. ACADEMICA OFICIO NO. 613-O-5/18721
Cuernavaca, Mor., a 29 de noviembre de 1991
ING. ARTURO IGLESIAS ZARATE CANDIDATO AL GRAO0 DE MAESTRO EN CIENCIAS DE LA COMPUTACION P R E S E N T E:
Después de haber sometido a revisión su trabajo de tesis titulado:
IMPLEMENTACION DE UN SISTEMA DE VISION PARA LA DETECCION. RECONOCI- MIENTO Y MANIPULACION DE PIEZAS DE ENSAMBLE POR MEDlO DE'UN ROBOT DE USO INDUSTRIAL"
Y habiend.0 cumplido con todas las indicaciones que el Jurado Revisor de tesis le hizo, se le comunica que se le concede autorización para que proceda a la impresión de la misma, como requisito para la obtención del grado.
Ciencias de l a .Computación. -,
ntenor Iñlcrnado Palmira S/N C.P. 62490 siai 4-224 C.P. 62431 Cuernavaca.,Mor;México ~ .
Tel. (73) 18 77 41 y (73) 12 76 13 ~ '
-
CONTENIDO:
. . .." . . . ., : .
-
CAPITULO 5 1
IMPLANTACION DE UNA MAQUINA DE VISION.
............... 5.1 Rutinas para visión de bajo nivel. 42 5.3 5.2 Un nuevo algoritmo para segmentación ............. 44
reconocimiento de objetos. ....................... 49 5.3.1 Cálculo de descriptores .......................... 49
las piezas ....................................... 55 5.3.3 Reconocimiento de patrones .......................
Implantación de módulos para descripción y
5.3.2 Determinación del ángulo de inclinación de
56
CAPITULO 6
ROBOT MANIPULADOR.
6.1 Características generales ........................ 59 6.2 Dimensionamiento. ................................ 60 6.3 Cálculo de pulsos eléctricos a los motores....... 61 6.4 Comunicación y características del Controlador
Lógico Programable ............................... 67
SECCION I1 : ARQUITECTURA DEL BISTEMA DE VISION, PRUEBAII Y CONCLUSIONES.
',
CAPITULO 7
FASES DEL SISTEMA DE VISION.
7.1 Fase de calibración del-sistema ...'.............. 7i 7.2 Fase de aprendizaje ............................... 74 7.3 Fase de reconocimiento~manipulación.............. 75 7.3.1 Cálculo de.trayectorias ............................ 77 7.3.2 Cálculo de la posición,~ orientación de
las piezas ....................................... 76 7.4 Generación automatizada de procesos de ensamble.. 81 7.5 Dsagrama de bloques ge'neralizado del sistema ..... 84
. .
CAPITUI.43 8
PRUEBAS, CONCLUSIONES Y' SUGERENCIAS A FUTUTRAS INVESTIGACIONES.
11 8.1 Pruebas y resultados obtenidos ................... 85 8.2 Conclusiones ..................................... 87 8.3 sugerencias a futuras hvestigaciones ............ 8 8
. . . . . . . . . . . . . . . ~. ....
.. . , . a
. . . . . . - . . . . . . . . . . . ~. . . ../ j . . ':. . . . . . . . . .
. .
-
C A P I T U L O 1
I n t r o d u c í i ó n
,
'- -- -- -- - -
-
1
i . .. . , ,, ,. . 'lo, .
1.1 objetivo general.
Integrar un sistema de visión para un robot manipulador con el fin de poder realizar procesos de ensamble en forma autónoma, dotándolo de CaDacidades para percepción,, reconocimiento y manipulación \i
de partes
1
inkustriaies.
1.2 Motivación.
que se coordinan medios de producción, ahUaCen de materias Primasi productos manufacturados y el sistema de transporte interno, los robots constituyen un elemento complementario que permite conseguir la interfaz flexible necesaria entre los distintos elementos y la herramienta de trabajo. Esta coordinación se logra debido a la capacidad de adaptación de los robots a un número muy variado de tareas, constituyéndose así como un elemento básico en el proceso global de automatización.
La facilidad de adaptación del robot al entorno y su flexibilidad, se deben a su capacidad sensorial, que permite la percepción de los objetos a su alcance, reconocimiento de sus formas, detección de obstáculos, etc.. El proceso de ésta información aunado con los logros en
- inteligencia artificial, permiten la robotización de tareas más complejas en un entorno menos rígidamente definido y con una mayor fiabilidad en la operación.
En un principio los robots carecían de sensores externos, lo que los hacia m6s rígidos y menos versátiles. Hoy en dia los robots incorporan capacidades sensoriales tanto tactiles como visuales por medio de captadores ultrasónicos, rayos láser o cámaras de Tv, permitiendo así la evolución de la robótica #hacia una nueva qeneración de robots, 10s
un sistema de manufactura asistida por computadora (CAM), en
, ~~ robots -inteligentes, que tendrán gran incidencia en los procesos futuros de producción. f - - 1.3 Problema a resolver, metas y contribuciones.,
En. la división de automatización y controles del Instituto Mexicano de' Investigaciones en Manufacturas Metal-mecánicas se construyó un robot manipulador con fines didácticos y de investigación. Las partes que lo integran son :
- armario de control. - manipulador. - computadora personal con microprocesador intel
'i
80386 y coprocesador matemático 80387.
El computador personal.está conectado al.contro1 del brazo por medio de su interface auxiliar para comunicaciones RS-232. Existe dentro del armario un controlador lógico programable (PLC), 'por medio del cual y de
.. .. . . . . . . .,.: . .' . ,p - ~ .. ~ .. . . , .. ~ ,,
. , I . ' ' !p _ _ - -.
-
81
acuerdo a un formato preestablecido se envía información para accionar los motores que moverán los tbrazos del manipulador para gue este se desplaze a la posición requerida; es decir, el movimiento del manipulador está gobernado por las instrucciones proporcionadas por el operador de la computadora.
Recientemente fue adquirido hardware y software de un sistema para toma y procesamiento de imágenes digitales enfocado más bien a fines dé vigilancia y actividades del tipo publicitario, el sistema consta de :
. . - cámara PULNIX de uso general CCD de alta I
resolución de 1/2". ..
- tarjeta digitalizadora con convertidor analógico-digital.
- software para detección y procesamiento de imágenes.
La idea' principal de ,este trabajo ,es conjuntar la cámara de TV, tarjeta digitalizadora, computador personal y el robot 'manipulador. para construir un sistema de ''visión artificial, de tal .manera que el manipulador sea capaz de ver y reconocer un conjunto de.piezas colocadas en forma aleatoria en una m'esa de trabajo, que de acuerdo con un proceso sistematizado de ensamble,: previ-amente almacenado, -coloque sólo las ?iezac reconocidas en su posición final.
Con"la implementación del sistema se dispondrá de un robot nanipulador- con percepciÓn-.visual . para detección,. reconocimiento y reubicación de objetos con: aplicación factible y directa en procesos de ianufactura integrada por .,computadora. (CIM) y en celdas flexibles de ianufactura' con el objeto de mejorar' y optimizar los procesos .ndustriales para satisfacer 'así los requerimientos del . sector
-
Iroductivo nacional. ~ .~ -+ : 1 4 . - - - - ~ - ' - -,
El sistema servirá I como interface entre el robot, actualmente anipulado por control numérico y el equipo de TV recientemente dquirido.
Se establecen perspectivas para el desarrollo en el campo de visión rtificial en él Instituto, asi como su aplicación a otros proyectos elacionados con el procesamiento digital de imágenes.
81 . . . . . . . . . . . . . . . . ... . . . . . . . . . .
.~ . ~ . . . .
. . , , ~
. . . . . . .- . , .
. . ,. ._ 4 .-
11 'i ~. 11:
. ~.
. .
. . . , . I . . . . . . . . . .
I . . ,,
. : . .
. , . .~ , .
# . -
81 . . . . . . . . . . . . .... . . 4 .- ... . . . . . . . . .~ . ~ . . , , ~ . j . .
. . . . . . . . , . .- . . .
. . . ~. . I
. . . . . . . I1 . : -
-
II U
'l. iI
'! I ' 1
, , . . . . . . . , . , . . I .;. . .
1 . 4 Estructura de la tesis.
Esta tesis está organ(zada como sigue: el segundo capítulo trat' conceptos básicos de robótica y sistemas de visión artificial desde u: punto de vista muy general. ,,El tercero aborda el tema de la visión di bajo nivel para el. cual se tratan los temas de la adquisición : preprocesamiento de la imagen. En el cuarto se describen las pa,rte,s qui constituyen la visión de 11 alto nivel, como son la segmentación descripción y reconocimiento. En el capítulo cinco se implanta unc máquina .de visión haciendo de los recursos propios de hardware ! software, y que conjuntamente con el manipulador, se utilizará pari constutuir nuestro sistema dé visión. El capítulo seis tr,ata el tema de: manipulador describiendo genbralidades, funcionamiento y características de comunicación con el sistema de visión. El capítulo siete analiza, diseña e implanta un sistema de visión para nuestro manipulador. En el capítulo ocho se prueba el sistema, se comentan los resultados para dai algunas conlusiones sobre 'el 'trabajo y finalmente se dan sugerencias para,posteriores investigaciiones. . .
. .
-
SECCION I
Máquina d e V is ión y Manipulador
CAbmPITULO 2
Generalidades y Fundamentos d e los Sistemas
de Visión Art i f ic ia l Apl icados a
Robótica Industrial.
-
4
En este capitulo se dai un panorama generalizado en cuanto a configuraciones y clasificación de los robots industriales Y de Sus sistemas de percepción sensorial, específicamente de la visión artificial. se hace un estudio conparativo Con la Visión humana Y finalmente se da una descripción generalizada de 10s elementos *e forman un sistema tlpico de visión artificial.
2.1 Antecedentes históricos de la robótica.
Uno de los elementos más representativos de los actuales sistemas de producción lo constituyen los robots industriales, los cuales cuentan con elevado grado de flexibilidad y adaptabilidad a las variaciones del entorno. Asi, incrementan su uso y. funcionalidad en una amplia gama de actividades, dando lugar a la aparición de una nueva rama tecnológica denominada robótica industrial, la cual a su vez se apoya en diversas diciplinas técnicas tales como: la electrónica, la automatización, la mecánica, la informática, etc.
El término lsrobot't se deble [i] al escritor checo Karel Capek (1890- 1938) quien en los años veinte lo utilizó por vez primera y que se deriva del verbo eslavo "robotatll que significa trabajar.
Aunque existieron sistemas teleoperados después de la Segunda Guerra Mundial semejantes a los robots actuales, el verdadero desarrollo de la robótica se inicia en la primera mitad de los años setenta. Aparecen las primeras asociaciones nacionales de robótica tales como: JIRA (Japan Industrial Robot Asociation), la RIA (Robot Industries Asociation).
Existen varias definiciones de robot, una de las más aceptadas es la formulada 113 por la RIA : It Un robot es un manipulador reprogramable y multifuncional, diseñado para mover cargas, piezas, herramientas o dispositivos especiales según variadas trayectorias, programadas para realizar diferentes trabajos1!.
Actualmente existen dos generaciones de robots. La primera agrupa a robots que realizan operaciones- elementales con movimientos muy repetitivos, la segunda generación representada por robots capaces de realizar operaciones muy Complejas en condiciones de entorno variable ya que están equipados con sensores específicos. Estos últimos son 10s que se desarrollan actualmente.
Existen varias formas de clasificar los robots, una de ellas es de acuerdo con SUS aplicaciones, tales como: robots de soldadura, pintura, manipulado, ensamblado, etc.
it
2.2 Clasificación y configuración de un robot. I1
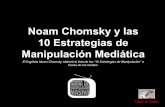
Son cuatro [i] los eiemFntos más importantes en la configuración generalizada de un robot; dos de ellos constituyen la parte física del robot, sistema mecánico y sistema de control. Los otros dos forman parte del modo de funcionamiento habitual, el entorno y el sistema de generación de tareas. La fig. 2.1 muestra su interrelación así como l o s elementos más importantes de estas cuatro partes.
. . . , . ~i ~ . . . . . . .
I , ,.. . ,. ~. . . . . . . . . ............... . . . . .. I . . - . ~ ~ . - .. ~. ... ": ,:< i ' :. * .~ . . . . .. . . ~ . ., . . . . . . - .
-
5
(
interacción
, Sensorts externos
Fig. 2.1 Configuración general de un robot.
a)Sistema mecánico.- Es la estructura mecánica formada por una serie di elementos llamados eslabones, unidos entre s í por articulaciones. Estoi elementos dan origen a tres dispositivos llamados: brazo, muñeca ! elemento final.
Los desplazamientos de ,la estructura los realizan una serie dc accionadores que transfieren sus movimientos a las articulaciones poi medio de un sistema de transmisión.
b) Sistema de control.- Usualmente formado par un microcomputador pars zontrolar los movimientos del robot mediante el proceso de l a información proveniente de ,i los censores internos. Para ello requiere de almacenamiento, procesamiento y ejecución de algorítmos de control para n-ogramar los movimientos, l!asi.como para intercambiar información con el Pxterior por medio de los dispositivos E/S(Entrada/Salida).
:) Generación de la tarea.- Los robots de la segunda generación cuentan :on sistemas de generación de tareas a muy alto nivel tales como: itornillar, seguimiento de objetos móviles, inserción, ensamle, etc. :ste sistema puede residir en el computador o encontrarse fuera de 61. iequiere del modelado del entorno del robot, así como información de los encores del mismo.
'1
) Entorno.- Conjunto de objetos que están, o por su movimiento pueden star en las proximidades del robot.
El sistema mecánico. y. el entorno .tienen una 'relación guy, estrecha, uede modificarse uno por efecto del--otro.'Para'detectar éstas - - sriaciones se requiere de" sensores externos que transmiten información L sistema de control para'.corregir los movimientos del robot en caso de 4riación del entorno..
!I
-
Juntar
/
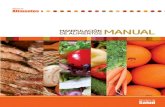
Fig. 2.2 Sistema mecánico de un robot.
U
Estructura mecánica.- como se indicó, la estructura mecánica Se forma de eslabones unidos por artiCUlaCiones. Existen dos tipos de articulaciones, las prismáticas y las de rotación. Las Primeras Permiten movimientos de traslación de un eslabón respecto ai contiguo, mientras que las otras permiten giros relativos de l o s eslabones.
El movimiento combinado de las articulaciones permite situar libremente el elemento final del robot. El número de grados de libertad de un robot (GDL) es el número de movimientos independientes que puede realizar su estructura respecto de un sistema de coordenadas fijo, situado normalmente en la base del mismo. El número de GDL. coincide con el número de articulaciones, siempre que éstas tengan movimientos independientes, fig. 2.2. 'I
Para posicionar y orientar el elemento final del robot en un punto del espacio se pueden requerir de 4 a 7 o más grados de libertad, dependiendo de lo complejo de la tarea. Hay una tendencia actual a especializar los robots 'Botándolos de los GDL precisos según las operaciones que debe realizar.
I
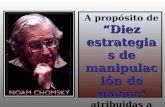
Tomando en cuenta el problema de posicionar el extremo del robot (sin orientarle) y desde el punto de vista geométrico, es común considerar cuatro tipos de sistemas de coordenadas y asociarlos a cuatro estructuras básicas de robots(figs. 2.3 y 2.4)
1. Polar.- Gran alcance, pa,ra alimentar máquinas herramientas.
2. Cilíndrica.- Para alimentar, cargar y descargar. Buena rigidez. Espacios reducidos.
'1 .
3 . Coordenadas cartesianas.- Muy buena rigidez. tipo caja, gran repetibilidad. IL
4 . Brazo articulado. - Granl'alcance; varios grados de libertad.
: , .
. . > . I :
-
Cartesiana Cilíndrica
Esférica Angular
ir Fig. 2 . 4 Estructuras mecánicas de robots.
I1
Elementos finales de los robots.-,' Son l o s di.spositivos que se acoplan a la muñeca del robot para realizar directamente las tareas encomendadas a éste.
La fig. 2.5 muestra la muñeca de un robot. Existen múltiples' elementos finales de los robots, según las operaciones a ejecutar: soldadores, fresas, pistolas, de pintura, ventosas, etc. El elemento terminal más común son las pinzas o garras y las hay de dos y tres dedos, de acuerdo a la forma de los objetos que se han de sujetar.
I .
'+$% :i " ó P 0 . ' , - O"
Fig. 2.5 La muñeca de un robot.
Accionamiento del. sistema.mecánico.-.Existen tres tipos..de accion.amiento ~ que se asocian a tres formas de energía y tecnología: .neumático;-: hidráulico y eléctrico. i!
El accionamiento neumático.usa aire comprimido a presión para accionar. por lo general cilindros, neumáticos lineales. Debido al reducido peso de' estos dispositivos y a la 'If lexibilidad de los conductos de alimentación de aire, los hace adecuados para accionar sobre articulaciones prismáticas. Sin embargo debido a la compresión del aire, es difícil controlar el posicionamiento de puntos intermedios de los cillndros, utilizandose .sólo .en movimientps-.de carrera ..fija,.,,.,Aunando .a esto las frfcciones en. partes .,móviles,. oxidación-. de ..os elementos.: de,:control. y . . gran nivel de. sonoridad; su :USO- sea.. ,escaso . Como -accionamiento .. ~ . -
. . . . ~ . . . - . .
.. . .. . .. . . .. .+-y . -. .. L~~
I . . . 4
http://tipos..dehttp://movimientps-.de
-
'I
directo de las articulaciones, no obstante es ampliamente utilizado er los elementos finales del robot. 0
El accionamiento hidráulico utiliza líquidos a presión como aceites 1 tiene la mejor relación par ,.en la articulaciÓnJpeso del accionamiento, lo que lo hace capaz de transportar elevadas cargas. La regulación de 12 posición con accionamientoa hidráulico es más precisa que con el accionamiento neumático, algunas de las desventajas son: necesidad de ur filtro, necesidad de eliminar el aire, elevado tiempo de mantenimiento.
-.El accionamiento eléctrico es el que se utiliza en la mayoria de los robots industriales. Permite una precisa y fácil regulación de ia posición a través de servomecanismos. Los motores que se utilizan son de dos tipos: de paso a paso y de corriente continua. Los primeros se utilizan en movimientos que no requieren grandes esfuerzos ni grandes precisiones de posicionamiento.
LOS motores de corriente continua son muy sensibles a sobreintensidades, como su velocidad nominal es del orden de 3000 r.p.m. requieren reductores para poder mover las articulaciones a velocidades más bajas.
El campo de acción de un robot se define como el conjunto de puntos(espaci0) del sistema cartesiano accesible al extremo del mismo. El campo de acción se calcula mediante los ángulos límite de variación de cada una de las articulaciones, fig. 2.6.
Como una medida de seguridad, cada accionador de las articulaciones está dotado de un mecanismo de bloqueo de los movimientos al detectarse una sobreintensidad producida por un choque o colisión, impidiendo asimismo sobrepasar los ángulos límite. A continuación se listan algunas de las medidas de seguridad'más comúnes:
a)rectricciones del sistema de control a no alimentar los accionadores en caso de anomalía.
b)tope a base de fines de carrera. c)topes mecánicos que impiden proseguir l o s movimientos.
Sensores B e pos ic ión . - Son básicamente de dos tipos: ópticos(encoders) y magnéticos(reso1vers). L o s primeros funcionan en forma incremental, están formados por un disco con marcas unido a la articulación y dos Eotocélulas fijas, desplazadas de forma tal que permiten contar el iúmero de marcas y detectar el sentido de giro.
Conociendo la resolución del sensor -marcas por vuelta- se calcula el ingulo girado de la articulación.los resolvers funcionan .en forma ibsoluta, no requieren sincronización, 'aunque como medida^ de. s.e;uridad.~ iuelen sincronizarse .: Está.n formados ,.por---dos -bobinasT-.úna. móvil-~ con la -. ,rtlculación y otra fija. Excitando la bobina y midiendo el desface roducido se calcula la posiciÓn.angular de la articulación.
-
c) . .
. Fig.' 2.6 Tipos de transmisión de. movimientos:'. a) trans. directa. b) mediante palanca. c) .paralelogramo.
. .
características de, posicionamiento de un robot.- Existen tres características principaies[i]:
a) Resolución(0 precisión) Define e,l mínimo incremento que el robot'puede realizar en su extremo,
se mide en +mm. La resolución de un robot está directamente relacionada con la resolución de 1.0s sehsores de posición de cada articulación y con el tamaño del computador enqsu sistema de control.
b) , Repetitividad. Medida estadlstica del, error de posicionamiento del extremo al
retornar éste al mismo punto del espacio varias veces y desde distintas posiciones iniciales, se miae en mm.
c) Exactitud. Permite conocer con .que: error se posiciona el- robot respecto a un
sistema base inmóvil genérico. Se mide en +- mm. y depende de la fiabilidad de 1-as dimensiones de los eslabones y de errores de redondeo en el cálculo de las posici!ones .de cada articulación.
Sistema de control de un robot..- De.,acuerdo a. su sistema de control, los robots se pueden :&lacif icar [ 21 en:
il
. .
. A. Robots de secuencia limitada.; . . A - . : ~ , ~ ~ ~ - - ~ ~ - ~ ~ ~ ~ ~ . ~ ' . ~ . - . . * _ .r B. Robots de repetición.-~-.~~--..~-----._. . - ~. . , .. - . .
B . 1 con control punto a punto. B.2 con control de trayectoria continuo.
C. Robots. inteligentes. ,I
A. Robots de secuencia. -limitada.- L* No ~ utilizan servo controles para indicar . la posición relativa de las articulaciones, utilizan interruptores de límite. o:paros mecánicos. Todas las articulaciones se
'I nueven a 'sus posiciones extremas y el movimiento controlado .se debe al arreglo mecánico d e l robot:
- . . . . 8 . . . . . . .
. . _ . . . .
.~ . . 3
. . . I
-
11
B. Robots de repetición.- En e/tos tipos se programa al robot enseñandole los movimientos. Tienen control tipo servo(mal1a cerrada para Comparar las posiciones alcanzadas
puntos almacenados previamente en su memoria, se aplican para alimentadores de piezas y punteadoras.
que le fueron enseñadas).
movimiento alcanzando una serie de B.l Tipo punto a
B.2 Tipo de trayectoria continua. El control define una serie de puntos muy próximos que constituyen la trayectoria que el robot deberá .alcanzar. Toda la trayectoria es controlada(servo). Utiliza una computadora como control.
C.Robots inte1igentes..Interactuan con el medio ambiente su
Ocurre en su 'volúmen de trabajo. Ejemplo de estos son los robots ensambladores, 10s de soldadura de arco, pintura, etc; Utilizan un lenguaje de alto nivel y toman decisiones de acuerdo a la información obtenida de los sensores. . .
2.3 Percepción censorial en robótica.- La flexibilidad y' facilidad de adaptación de l o s robots a un número muy.variado de tareas es debida a su capacidad sensorial, permitiendo una actuación más inteligente 'en un entorno menos rígido y con una mayor fiabilidad en su operación ...
Los robots .de la la. generación carecían de .sensores externos, lo que daba como resultado la definición de un entorno muy rígido. En la 2a. generación, los robots integran cierta capacidad sensorial, en la que se incluye la visión, permitiendo as1 mayor flexibilidad. Los robots de la 3a. generación estarán dotados .de sistemas multisensoriales .y mayor nivel de inteligencia aktificial, lo que permitirá efectuar la planificación. de la tarea encomendada, la detección y corrección de errores.
Actualmente los sistemas de percepción sensorial más desarrollados para los robots industriales son los de percepción tactil y percepción visual, ya sea por captadores ultrasónicos, utilización del láser o por medio de cámaras. de TV, en éste Último campo y debido a los avances de la microelectrónica se tiende a miniaturizar las cámaras para colocarlas en el elemento terminal del robot(mano o efector final).
2.3.1 Percepción visual. - Las aplicaciones industriales de la percepción visual en la robótica comenzaron a'desarrollarse hasta 1975, debido a lo costoso' del equipo para procesar imágenes digitalizadas con mayores resoluciones que permita el'- reconocimiento de piezas industriales. .En la actualidad los sistemas de visión están basados en la utilizaci.Ón. de cámaras ,de TV convencionales. El problema del .procesado se debe al elevado volúmen de. información suministrado por la cámara de TV, que puede ser de 512 lineas digitalizadas en 512 puntos con . 8 bits .de resolución (blanco y negro) o mayor si se utiliza en color, este volúmen de iniormación se obtiene cada 20 ms(mi1isegundoc) , es decir a razon de 50 cuadros por .segundo. Se 'pueden presentar di'ficultades. como consecuencia de la' distorsión introducida por el sistema de digitalizacion, así como del sistema de iluminación utilizado. Esto,trae como consecuencia la posibilidad de que aparezcan tres situaciones:
1) elementos de la escena que no figuran en la imagen obtenida. 2 ) información de la /;imagen .'que rresponde, a elementos de la
3 ) elementos de^ ¡a escena -que-/dan'.lugar .a: información :en la imagen.. , .
de movimientos dependiendo de 10 que
, .
.., ~ . . . # ~' escena. . . ~.~ . .
,! , . I ..
-
I1 I I
Definitivamente de las tres situaciones s610 es deseable la tercera. Además es necesario obtener la información de la manera más condensada posible con objeto de minimi'kar el tiempo de proceso que requiere SU interpretación, ya. que esta característica es fundamental para SU anlicación en robótica industrial. *
2.3.2 vision en humanos vs. Visión en máquinas.- El concepto de visión humana como una aplicación de automatización industrial es un mecanismo complejo en donde la función visión no está aislada sino gue es un sistema integrado e interdependiente de varios sensores. El grado de acoplamiento es adaptativo y üependiente del cerebro y de diferentes partes del cuerpo. La fatiga, enfermedad, capacitación previa, conocimientos, etc. afectan el desempeño de los sistemas de visión de manera tal que no es fácilmente cuantificable.
Podríamos comparar las máquinas de visión con el sistema visual humano en la base de parámetros funcionales aplicables a procesos de manufactura industrial, tales como [ 3 ] :
I1
- Adaptabilidad. - Toma de decisión. - Capacidad para 2 y 3 Dimensiones. - Calidad de las medidas.
Adaptabilidad.- Capacidad de un sistema a ajustarse automáticamente O modificar sus operaciones he acuerdo a parámetros del medio ambiente para'obtener un resultado deseado.
En las máquinas de 'visión las capacidades de adaptación son muy rígidas y son ectab1ecidas"por el hardware y software del sistema. El sistema es adaptable en el sentido que puede ser reconfigurado para realizar un conjunto diferente de acciones.
El sistema humano es alt-amente 'adaptable y dinámico debido a que su capacidad es determinada por las características físicas del ojo así I como por el intelecto del )individuo. El intelecto incluye un número de elementos no medibles tales como'apreridizaje, asociación y percepción, de manera que el humano aprende en un proceso automatizado de prueba y error, sin programación. -
La mayoría de los procesos industriales de manufactura son rígidos y fijos de acuerdo a espeoificaciones dictadas para el producto. La característica de no adaptabilidad de sistemtis de máquinas de visión puede ser una ventaja en aplicaciones de visión industriales de procesos idénticos sobre lineas de manufactura paralelas..
Toma de decisión.-. Los sistemas de .visión humanos son 'efectivos' en tareas de inspección relacionadas .a .'caracteristicas tales como color, forma y o1or;debido a sus.capacidades de percepción e interpretación.
'Los sistemas de..visiÓn en máquinas requieren de la cuantificación de los parámetros medibles ut,;ilizados en el proceso de toma de decisiones,: mientras -que la visión humana .puede' basar una decisión en .terminos relativos, como luz o sombra. '' Los sistemas de visión en máquinas requieren un valor numérico especifico de nivel de gris en un sistema que tenga un número dado de tonos de gris, 'o bien el número preciso de pixeles(unidades mínimas !de representación para gráficos) entre dos puntos de..una. imagen dada?.. Los sistemas ,. de -visión en.: máquinas:, son. más=.. - consistentes .. que los sist,e+mas de -visión. humanos*..para:;-decisiones': basadas ~ en valores .: cuantitativos.. - . - LOS.-:. sistemas .humanos ..i son ..mejores en :
.I
' . u . . . . li
.. -
-
1 aplicaciones de decisión basadas en valores cualitativos. Sin embargo 1 consistencia de los sistemasJde visión humanos se ven impactados por 1 fatiga, factores del medio ambiente y condiciones físicas del individuo.
'I
Calidad de nivel d precisión son dos factores principales en la calidad de las medidas. Lo sistemas de visión de máquinas son claramente superiores a los sistema de visión humanos en el casoyde aplicaciones con valores cuantificables.
medidas.- La yoncistencia de resultados y el
El sistema de visión huma,no distingue entre 10 Y 20. tonos diferente de .gris, y su comportamiento0 varla dependiendo de factores como fatiga condiciones.ambientales, distracciones en el área de trabajo-
La capacidad de un sistema de visión de' máquina para distingui niveles de gris es fija y depende del número .de bits Para codificar e entero que representa el nivel de gris. Su COmpOrtamiento es constante 10 largo.de la vida útil del' equipo.
capacidad para dos y tres dimensiones.- La capacidad tridimensional de sistema de visión humano provee la caracterlstica de generar informació: de distancia. Los sistemas de visión en máquinas se les pueden da: capacidades tridimensionales por medio de dos o más cámaras y -compleja! técnicas de procesamiento. .,
La capacidad bidimensional está disponible tanto para humanos comc para máquinas, difieren en': que los datos de los sistemas de visión ei máquinas están cuantificados y pueden ser usados para hacer medidas COI grado .de precisión que depende de la resolución de la cámara y del modc gráfico utilizado. Los sistemas humanos pueden hacer una rápidi estimación de la distancia.,entre dos puntos, pero no pueden obtener cor exactitud ese valor como lo hacen los sistemas de visión de la$ máquinas.
2.4 'Sistemas de visión artif icia1.- Podemos definir la visión artificial como 141 "Los procesos de obtención, caracterización e interpretación de información de imágenes tomadas de un mundo tridimensional" y son estos procesos los que constituyen verdaderos sistemas autónomos de percepción que a su vez se pueden subdividir en dos niveles y éstos en seis áreas principales (fig. 2.7) que"son:
- Adquisición de la imagen. - Preprocesamiento. - Segmentaciónlde la imagen. - Reconocimiento.
visión de bajo nivel:
visión de alto nivel:
, - Descripción.,.
- Interpretación.. --.F-:.-:G . .-. . .. .. I .. . . .
Adquisición de ia imagen.'- Proceso a través del cual se obtiene una imagen visual. Por 10 general se utiliza una cámara de TV que toma la información visual de la .,escena en forma de señal analógica y la pasa por un convertidor. analógico-digital. Una vez digitalizada la imagen es
en la memoria' de la- tarjeta digitalizadora para un posterior Proceso- E l sistema' de iluminación por lo general es incluido en esta parte, del sistema.
Preprocesamien'to. - Tratamiento de la información digitalizada previo a la seqmentación, consistel: en la- aplicación -de.:filtros de imagen para eliminación de .ruido y leailce .de' los.';detalles.- :. .; ' - - . . - : . . , ' . . . - . . :r. .' .
11.- . . ' .~ . . . .
http://largo.de
-
y 13
Segmentación.- Etapa en la cbal se separan los diferentes objetos que forman la imagen. Para ello ,la información digitalizada es binarizada, es decir convertida a dos tonos de gris, uno para el fondo y otro para
I1 l o s objetos. iI
Descripción.- El objetivo fundamental consiste en extraer una serie de características(por ejemplo, tamaño, forma) que faciliten el reconocimiento de los objetos segmentados. Adicionalmente se extrae información relacionada con la posición y orientación de cada una de las piezas en la escena. ':
Reconocimiento.- Proceso que identifica los objetos en la escena respecto de una serie de objetos previamente almacenados denominados patrones.
Interpretación.- Se entiende. según [5] como la . inferencia de información, con base a la Presencia dentro de la. imagen de los objetos identificados, de sus características, o de las relaciones estructurales entre ellos. Esta información puede constituir, el objetivo 'último del sistema de visión o l a información de entrada. que le permita a otro sistema de manipulación efectuar,modificaciones de su entorno en forma l'autónoma". .
. .
. .
REFERENCIAS
[l.] Mompln Poblet J. "SISTEMAS CAD/CAM/CAE DISEÑO Y FABRICACION POR COMPUTADOR".Serie Mundo Electrónico. ISBN: 84-267-0~321~5
, MARCOMBO S.A. BARCELONA ESPANA., il
[2] Curso de Robótica Industrial. Div. .de educación continua UNAM, México.D.F.de1 11 al 15 de feb. de 1991.. ;.. . - . :I
I
[ 3 J Galbiati L o u i s 3.: "1.ZACHINE VISION AND .DIGITAL:- -. ~. ' . . ~ - IMAGE PROCESSING ' FUNDAMENTALS" Prentice Hall-:- -.: ISBN: O-13-542044-X
' . :. . . '-
[4] Fu/González/Lee "ROBOTICA CONTROL, DETECCION, VISION E INTELIGENCIA" Mc. Graw Hill. ISBN: 84-7615-214-0 '1' '
r 5 J j
GAUTHIER/DUQUE/CAMARGO VALGUNAS. REALIZACIONES EN EL CAMPO DE LA VISION~ART~FICIAL~~ IV Congreso Latinoamericano de Control Automático Puebla,
. . . .. . . I ~. .
ic .Puebla México,: nov.'i9'90' PP:;6.4. 1: ,
... . . .-
. . . 1.. . , . . .. _. . 4
.. it
. . .~ .;.. . . .
. ~ :.I1 :. . . . . ~. . . . ."- . . .... . .: . . I , _.
-
CAPITULO 3
Visión de Bajo Nivel:
Adquisición y Preproceso de la Imagen.
-
En este capítulo se dan' a conocer los elementos que constituyen la visión de bajo nivel dentro de una máquina de visión. En lo que respecta a la adquisici6n de la imagen se estudian desde los sistemas de iluminación hasta el almacenamiento de la imagen en el digitalizador. Se describen algunas de las técnicas m a s comiines para el preproceso de la imagen, se da a conocer la importancia de las imágenes binarizadas y por iiltimo se describe a detalle un método práctico para automatizar el Cálculo del valor del umbral de binarización. . Introducción.
~1 objetivo de las investigaciones en el CamPo de visión Por computadora es habilitar máquinas para interpretar escenas Visuales y entender el contenido y relaciones entre ellas con objeto de que una posible solución o acción pueda ser tomada.
La mayoría de los sistemas actuales de visión artificial consideran básicamente dos niveles de. procesamiento: visión de bajo y visión de alto nivel. Los procesos primarios están asociados a la visión de bajo nivel por ser considerados reacciones "automáticas" sin ningún tipo de inteligencia, tales como la' percepción y procesamiento de la imagen, en los que se encuentran funciones tales como formación de la imagen, reducción de ruido, discontinuidades de intensidad, binarización, etc.
Asociaremos la visión de alto nivel a procesos que extraen características y etiquetan componentes de la imagen obtenida de la visión de bajo nivel. Basados en el esquema de subdivisión de un sistema de visión dado en la sección 2 . 4 , consideramos la segmentación, descripción y reconocimiento de objetos individuales como funciones de este nivel,
3.1 Adquisición de la imagen.- Proceso mediante el cual la imagen visual de un objeto físico y sus Características intrínsecas se transforman en un conjunto de datos digitalizados que pueden ser usados por la unidad de proceso del sistema. La adquisición de la imagen se considera [3] formada por cuatro fases.
1.- Iluminación. 2.- Formación de la imagen o enfoque. 3.- Detección de imagen o sensaüo. 4.; Formateo de la señal de salida de la cámara.
Iluminación.- E s un parámetro importante ya que afecta directamente la calidad de l o s datos de entrada así como la complejidad de los algoritmos de visión. Es' necesario para cada aplicacion adaptar el sistema de iluminación, ya que *éste no es estándar.
En el tipos de - mercurio y
medio ambiente industrial se uti lámparas que son : incandescente, vapor de sodio.' Sin embargo el uso
* de
.lizan básicamente cuatro fluorescente, vapor de
de iluminación fuera del
-
15 r lij
11
espectro visible, tal como rayos X, ultravioleta, infrarojos se requiere para inspección especial que resultarla I1 imposible con luz visual. -
Los métodos de iluminación mas usuales para aplicaciones industriales se subdividen en'¡ cuatro categorlas :
1.- Iluminación' difusa. 2.- Iluminación posterior. 3.- Iluminación estructural. 4 .- Iluminación direccionai.
Iluminación difusa.- Se utiliza para objetos caracterizados por, superficies suaves y reguuares y donde las carcaterísticas de las superficies son tales que actúan como difusoras, fig. 3-la.
Iluminación posterior.- Cuando el objeto se localiza entre la fuente luminosa y la cámara: fig. 3-lb, de ello resulta una silueta del objeto por la luz no interceptada por un cuerpo opaco. Normalmente se coloca un vidrio escarchado! sobre la fuente luminosa para producir una área de emisión difusa. Este tipo de iluminación tiene la ventaja de produir imágenes de altb contraste minimizándose la tarea de procesamiento de la imagen, ya que es utilizada en aplicaciones en las cuales las siluetas de los lobjetos son suficientes para la ejecución de las operaciones de alto nivel.
Iluminación estructural.- Utiliza proyección de puntos, franjas o rejillas sobre la superficie de trabajo. Se tienen dos ventajas, primero se establece un patrón de luz conocido de.la superficie de trabajo y las diferencias con éste patrón indican la presencia de un objeto, simplificando as1 el probliema de la detección del objeto. En segundo lugar, analizando la forma en que el patrón de luz es distorcionado es posible obtener información de las características tridimensionales del objeto .
Iluminación direcciona1.- Es útil para la inspección de la superficie de los objetos , donde los defectos tales como hoyos y arañazos pueden ser detectados usando un haz de luz altamente direccional (por ejemplo un haz láser) y medir el grado de dispersión. La presencia de un desperfecto suele incrementar la cantidad de luz dispersada hacia la cámarallfacilitando la detección del defecto.
Formación üe la imagen.- La imagen del objeto es enfocada sobre el elemento sensor con un lente similar al de una.cámara fotográfica. La diferencia entre una cámara fotográfica y un sistema de máquina de visión es que la cámara usa una película fotográfica en lugar de un sensor usado en el sistema de visión para capturar la imagen. El sensor convierte la imagen visual en una señal eléctrica.
La cámara en un sistema -de visión se especifica en- forma separada del sistema de visión como, requerimientos de capacidad y características dependientes de las aplicaciones. Son tres los parámetros asociados con lentes ópticos en la formafión de imágenes.
'I
'
11 ~
. . I ~. . . ." ,. .*. . . . . . .
.. I+ $,E , -.. ; . . . ~..
.~ ~.
-. . .. . . Ni " .
. .. . . ..: ~- . . . .. .
.. ..
. . . . "
.. ., .i.
. .
-
. . . . . . . , . . . , ., , . . . . . - . . . . . .. . 6 ; .. .. ".I I(/ 1.- Magnificación.
3 . - profundidad de campo. '1
2 . - Longitud1 focal. . .
.' . I
(b)
i/
:l
p l m . dr lmio in i
(I
., /I . .
(c)
cámara ,
supcdidc rugosa
' (a) Fig. 3.1 Cuatro sistemas de iluminación básicos.
;I . .
'' Detección .'de l a . imagen.- ' Los sistemas ' de' visión tienen un ---dispositivo óptico-eléctrico que convierte radiación electromagnética de - ,la imagen del objeto físi8o en una señal eléctrica usada por la unidad de procesamiento de visión. La imagen es enfocada sobre el sensor en la cámara por un lente. El elemento sensor localizado en el plano sensor. produce una señal electricla representando la imagen .visi,ble. Las cámaras: pueden tener ya sea un tubo o url elemento sensor.de estado sólido.
Las cámaras del tipo tubo desarrolladas para TV comercial en los años 3 0 - s , 'usan 'un tubo al. vacío que contiene un.e¡emento sensitivo a la
sensar imágenes'. La imagen internamente sobre el
I1
.. ., . .
, . .. -. - . . . ~~. , . . ~.
http://sensor.de
-
1
.17
111
elemento sensitivo a la ,luz es barrida con un cañón de emi'sión de electrones y así la imagen con carga eléctrica es convertida a una señal de voltaje analógica como !salida donde la amplitud de voltaje es proporcional a la densidad ,de carga y por tanto a la intensidad de iluminación del área recorrida por la línea de electrones, fig. 3.2.
..
Las cámaras 'de ectgdo sólido tienen 'fotodiodos Separados loca~izados en cada área del pixel como detector de la iluminación
lineal o I . .rectangular. .ms detectorec'de estado sólido fueron desarrollados . en
los 6O-c una mej.$ra de los dispositivos de acoplamiento de ...-.carga .(CCD) desarrollados en. los laboratorios Bell Telephone. La señal
de salida, de la cámara se. obtiene sensando cada diodo en secuencia ordenada para obtener una .serie de pulsos de. voltaje que'representan el valor del pixel en la localización respectiva, ésto se logra con la propiedad de que en cada elemento fotoconductor su resictividad decrece proporcionalmente con la cantidad de energía luminosa captada en el dispositivo de cada área delpixel; la señal de voltaje de salida depende de la resistencia del fotoconductor. Los pulsos de voltaje deben ser. convertidos a un formato especial para desplegar la .imagen en un monitor de TV convencional. o digitalizados si se desea almacenar los datos en una memoria de computadora,lfig. 3 . 3 .
El. elemento detector debe tener suPiciente sensitividad para detectar la radiación incidente y 'un tiempo constante w e permita la discretización de todos los elementos del arreglo 'para obtener el dato de la imagen. La 'salida del sensor es una serie de pulsos de voltaje representando la intensidad de l u z en las localizaciones de pixel, los pulsos de voltaje deben ser digitalizados si los datos han de ser introducidos a una computadora.
Resumiendo :
.. objeto.. ms..elementos son :ordenados ya sea en un arreglo
'I,
Características de las cámaras tipo tubo : . . , - Alta resolución.
' . - Alta sensibilidad, depende del tipo de tubo. ",: La imagen se puede Temar si existe radiación
.. intensa. --.Se , . pude tener imágenes retrasadas debido a la
- Las unidades son grakdes y pesadas Y disipan - Las unidades son sensitivas a vibraciones. 'Caracteristicas de las cámaras de estado sólido.
- US cámaras con arreglo matricial vienen con formato RS-170 para aespiegar en monitor de TV. - Las unidades con ordenamiento lineal pueden ser unidas extremo a extremo para producir arreglos lineales mavores.
baja velocidad de respuesta.
más calor que lac delestado sólido. " .
I/
81
- No hay distorción geométrica virtual, arrastre rezaqo. -
,,,. - Poco consumo de energía y pueden ser operadas .. , .
. , con baterias. . .' . .
:. 11, llil
. . . . . . . . . . , , . .
" . , '.
I1
-_
O
-
18 !I 'I
!I 4
. .
- La velocidad de transfer,;encia de pixelec es del orden de 20 Megapixelec/~seg. I1
cañón de, -.c + eltdiones. . , . ,
malerial ' ieapíar , .
Fig. 3.2 Rastreador de cañón de electrones.
hdc dc
X.- n
Fig. 3 . 3 Circuito censor[ fotoconductor de una cámara CCD. - , -
Formate0 de la señal de 'salida.- La conversión de una señal analógica .-a un formato de señal digital en las cámaras tipo tubo requieren tres pasos:
,* La señal analógica debe ser muestreada. - El valor de muestras debe ser cuantificado a los - Los valores cuantificados deben ser digitalizados.
' ., niveles de gris apropiados. Muestre0 es el proceso de obkener .valores instantáneos de voltaje '
analógico en.. instantes de' tiempo ' llamados puntos de muestreo. Para la: cuantificación de los 'valores de :voltaje ..muestreados es necesario establecer el número de ::niveles de gris que. serán usados por el sistema, los valores de pixel deben ser enteros y se deben de establecer reglas para redondeo. El tamaño de la pal.abra utilizada para almacenar. 21 valor debe ser igual
-
11 ' .
il' I¡
19
!I
codificar el valor del máximo+nivel d.e gris. Mientras mayor es el número de muestras mayor es la resolución . I del sistema.
'I Usaremos f(i,j) para indicar una imagen bidimensional que se i, j
f (i, j) es proporcional al brillo (intensidad) de la
obtiene con una cámara de TV u otro dispositivo de imagen donde indican las coordenadas espaciales (plano de la imagen) y el valor de en cualquier punto
ii imagen en ese punto.
Para estar en condiciones adecuadas de procesamiento por computadora, la función de imagen f (i,j) debe ser digitalizada
.--espacialmente y .en amplitud(intensidad). La digitalización de las coordenadas espaciales (i, j )I se denominará muestre0 de imagen, mientras que la digitalización de amplitud se llamará cuantización de intensidad o nivel de gris. Este último témino se aplica a las imágenes monocromáticas y representa I' la variación de tonos de gris del negro al blanco. Los términos de, intensidad y nivel de gris se usan indistintamente. .
t Suponga que una imagen continua se muestrea y se obtiene una matriz
de N renglones y n columnas donde cada muestra está cuantizada en intensidad. Esta matriz se llama imagen digital y se representa por :
'fb. j = . .
f[O,O] f[O,lJ f[O,2] ..... y0,M-1J f[l,O] 41,1] 1(1,2] ..... qi, M-l] .......................... .......................... f[N-l.O]1~1,1] ............ f(N-l,Ml]
. . Donde ' i, j son:. variables discretas : i=O, 1, 2 , ,a.N-l; j=O,i . ,2 , ... 14-1 cada elemento de la matr.iz se llama elemento de ima en o pixel..,. I(. 4
. . 3.2 Preprocesamiento.
El número de. técnicas de preprocesamiento de datos de imagen es elevado, sólo una parte cumple los requerimientos de velocidad de procesamiento y bajo coste de implementación, las cuales son características importantes [ 4 ] en un sistema industrial de vision.
Se describirán dos:, procedimientos bási.cos de preprocesamiento comunmente usados en robótica industrial, el primero, se basa en técnicas en el dominio del espacio:y el segundo se fundamenta en las técnicas del dominio de frecuencias usando la transformada de Fourier.
<
. . .
'I
Métodos en el dominio de espacio.- El dominio del espacio ,se refiere ai conjunto de pixeles que componen una imagen y los métodos de
. . . . , ... .* . . . . ,. '11 ..,.> ' . . ,' _ . * i , . . , , . . , . .I A t
.!,,. . , . .
. . . . . . ..... ~ . . . . . . . . . . . . . . .
, .. , . . . . . I
,, . II. E
,. . .. ,
-
20 r .. . - - ~ . ..... ~
. .- _. - ~. _--. ................... ...................... 4b r I¡ ' U
a ~ * , .. . . > . . - ~ .... ......
dominio espacial son procedimientos 11 que operan directamente %en estos ,
pixelec, se expresan como: '1 . g(i, '3) = h[f(i., j)] (3.2-1)
Donde f (i, j) es la idgen de entrada, g ( i , j) es la imagen que se obtiene (preprocecada) y hb es un operador en f, definido sobre el entorno de vecindad de (i, j ) .
~a forma más usada para,definir un entorno de vecindad sobre (i) j) es formar una zona cuadrada ,,de la imagen centrada en (i,j) fig. 3.Xf el centro de ésta cubimagen se irá desplazando de pixel en pixel comenzando en la esquina superior izquierda y se ir6 aplicando el operador a cada localización de (i, j) para obtener g(i, j).
I . Fig. 3.4 Una vecindad de 3x3 alrededor de un punto (i,j) en una imagen.
Una de las técnicas de dominio espacial más utilizadas esta basada [4] en el dominio de máscaras de convolución. Una mascara es una pequeña matriz bidimensional (2x2,' 3x3, etc.) cuyos coeficientes se eligen de manera tal que podamos detectar una propiedad dada para una imagen. De acuerdo a la fig. 3.5, llamamos w1, w2, .. w 9 a los coeficientes de la náscara y consideramos los 'ocho vecinos de (i, j) . El procedimiento se reduce a :
h[f(i, j)] = wl f(i-i,j-i)'+ w2 f(i-1,j) + w3 f(i-i,j+i) + w4 f(i,j-l) +, w5 f(i,j) + w6 f(i,j+l) + w7 f(i+l,j-l) + w8 f(i+l,j) + w9 f(i+i,j+i) (3.2-2)
en un entorno de vecindad de 3x3 de (if j).
Fig. 3 5 Máscara 3x3 general que muestra los coeficientes y las posicionest de los elementos de imagen correspondientes.
li
-
21
I(: F! -1 -1
I
Fig. 3.6 ~ á ~ ~ ~ r a para detectar puntos aislados diferentes de un fondo constante.
Una máscara utilizada para detectar puntos aislados diferentes de un fondo constante es ia mostrada en la fig. 3 - 6 .
Métodos en el dominio de frecuencias.- El dominio de frecuencias trabaja - con conjuntos de pixeles complejos, resultado de aplicar la
I transformada de Fourier a una imagen [4]. El concepto de frecuencia se suele utilizar para interpretar la transformada de Fourier y se hace notar que esta transformada está compuesta de sinusoides complejas. Debido a la gran cantidad de procesamiento que necesitan, estos métodos no están tan difundidos en aplicaciones de visión para robots como los de dominio espacial [4]. La transformada de Fourier tiene aplicación directa en análisis de movimiento de objetos y su descripción, técnicas de realce y restauración. Existe un método para evaluar la transformada de Fourier en forma instantánea (a la velocidad de la luz) por métodos ópticos, requiriendo para ello equipo con una alineación muy precisa, se usa en la industria para tareas tales como inspección del acabado de superficies metálicas.
Algunas técnicas de preproceso más utilizadas son :
3.2.1 Suavizado.- Se utilizan [4] para remover ruido y otros efectos espúreos que pueden estar presentes en una imagen como resultado del muestreo, cuantización, transmisión o perturbaciones en el entorno durante el proceso de obtención de la imagen. Algunas de éstas técnicas apropiadas para instalarse en un sistema de visión de un robot son :
- Promediado del entorno de vecindad. - Filtración de la mediana. Promediado del entorno de vecindad.- ES una técnica directa en el
dominio espacial para suavizado de imágenes. Consiste en dada una imagen f(i,j) genera una imagen suavizada g(i, j) cuya intensidad para cada punt0 (i,j) se obtiene promediando los valores de intensidad de, 10s Pixeles de f incluidos en el entorno de vecindad predefinido de (i,j).
Para todos los ( i , j ) de f ( i , j ) . S es el conjunto de coordenadas de los puntos situados en el 'entorno de vecindad de ( i , j ) , incluyendo ( i , j)
I/
-
I! ierfil. (transición de oscuro a :laro) se modelan como una rampa' en vez de hacerlo como un cambio brusco Le intensidad, esta es la repiesentación del hecho de que los bordes de ina imáqen digital suelen se'k ligeramente desdibujados- como resultado
En el perfil se observa que los bordes
iei muectreo. '
La primera derivada de un borde es cero en todas las regiones de ,ntensidad constante y tiene pn valor constante en toda la transición de .ntencidad. La segunda derivada es cero en todos .los puntos excepto en rl comienzo y final de una'transición de intensidad. Así la primera lerivada puede utilizarse para detectar la presencia de un borde iiientras que el signo de la segunda derivada se utiliza para determinar ii un pixel de borde se localiza en un lado obscuro(fondo) o en el lado :laro(objeto) del borde. Este estudio se puede aplicar no sólo a Derfiles horizontales sino a bordes con orientación cualquiera, iefiniendo un perfil perpend+cular a la dirección del borde en cualquier >unto., Como se mostrará la-primera derivada en cualquier punto de la imagen se obtiene empleando el valor del gradiente en ese -punto, >bteniendo la segunda derivada con la Laplaciana.
3 . 2 . 4 Filtros digita1es.- L o s más frecuentemente utilizados en xocecamiento de imágenes s,on l o s . filtros de paso alto y filtros de >aso bajo, dependiendo de que parte del espectro de frecuencia afecta, rig. 3 . 8 . Se usan para compensar defectos en la imagen, generalmente los llamados de origen. '1
La señal de salida del~~filtro de paso alto [8] contiene componentes le .alta frecuencia. La señal de salida del filtro de paso bajo, :ontendrá componentes de ,,frecuencia baja. Los componentes de baja 'recuencia en una imagen se caracterizan por un cambio lei7.tQ.~cen los 'alores de contraste de,. pixeles adyacentes, en relación a los iomponentes de alta frecuehcia, que son debidos a cambios ripidos de iontraste que se localizan'' en la arista de un objeto. El filtrado es !quivaiente a la convolución y es simplemente. la forma de frecuencia- y . :spaci.al de la misma operación.
..
IC1 Fig. 3.8 Filtros digitales (b) de paso alto y (c) paso bajo en una señal compuesta (a)
Jj
Los filtros de paso bajo no afectan componentes de baja frecuencia sin embargo atenuará las componentes de frecuencia alta. Manchitas leatorias en una imageni se consideran ruido. y son componentes de
-
!)I 24
'I frecuencia alta, ya que los valores de pixel de pixeles adyacentes cambian muy rápidamente. El'( efecto de las manchitas se puede reducir usando filtros de promedio, cuya matríz de coeficientes f i,j (3x3) hará la convolución para cada uno de los pixeles pi,j en la imagen, ubicando el resultado en el pixel central del área en la nueva matríz de imagen. Las reglas son:
1;- Todos los coeficientes serán positivos. 2.- La suma-de todos los coeficientes debe ser igual a 1. ' . .
!I
!I
-
1
11 11
11 3.3 BinarizaciÓn de la imagen. F
iluminación poster'ior se usa para industriales en un sistemd de visión, Fig. 3.10.
_ .
~. 25
inspección de
'* .,-
piezas
-.- .
(b) ( C )
Fig. 3.10 (a) Inspección de una pieza industrial utilizando iluminación posterior, (b) vista superior, (c) representación numérica de valores de intensidad.
Un histograma es una 'representación gráfica de las frecuencias de ocurrencia de cada intensidad(nive1 de gris) en una imagen. Las abscisas o eje de las x * s Fig. 3.11 son los valores de intensidad y las ordenadas o eje de las y * s es el número de pixeles que tiene el nivel de gris correspondiente.
I1
ÍA magnitud del histograma en un valor de pixel especifico es la probabilidad de que el valor de gris ocurra en algún elemento de imagen.
';El. h.istograma es útil para definir el nivel de umbral para convertir una imagen de escalas de gris a una imagen binaria o para modificar una porción del espectro de escalas de gris. Para obtener mayor contraste de las'caracteristicas de la imagen.
Uso de los umbrales.- El uso de umbrales en el tratamiento de imágenes es una de las principales técnicas usadas en los sistemas de visión industrial para detección de objetos.
'I
I,
' h e r
I . . . . . . . ...
. . # . .
'I . . . . , . . . . ., , . , . . . ' , . . : c , 5 ; ~ ~ . . . Fig.. .3.11. Histograma de intensidades.
. , . .< -, . .
. , . . . . r . . <
, . iJ
.,@.
. . , . - . .. .
% +.
r ! - . I ' ' .. . .
-
I1
Ill 26
.-
I1 Suponer que el histograma de intensidad de la fig. 3.11 corresponde
a una imagen compuesta de objetos claros sobre fondo obscuro, teniendo los pixeles del objeto y del entorno intensidades agrupadas en dos tonos dominantes. Una forma evidente de extraer los objetos del entorno es seleccionar unii nivel T que separe los dos tonos de intensidad. A s í un punto (i,j) para el cual f(i,j)>T sera un punto 1 del objeto, en caso contrario el'lpunto sera del entorno.
f(i,j)
- - -Podemos considerar el uqbral como una operación tal que : ' . . . T = T [i, j, p(i,j), f(i,j)] > i _ " . . . . . . .
Donde f(i,j) es la intensidad en el punto (i,j) y p(i,j) es alguna propiedad local del punto, por ejem. intensidad media. En Gn entorno de vecindad centrado (i,j) se crea una imagen:
(3.3-1)
En ia imagen g(i,j), a los pixeles a los que se les asigna el valor de 1 (o cualquier otro nivel de intensidad) corresponde a los objetos, mientras a los pixeles a los que se les asignan un cero corresponden al entorno.
el umbral se llama global, si T depende tanto de f (i, j) como de p(i, j) , el umbral se llama local, si T depende de las coordenadas espaciales (i,j) se llama umbral dinámico.
Los umbrales globalesi se aplican en situaciones donde existe una clara definición entre objetos y entorno y cuando la iluminación es relativamente uniforme. Las técnicas de iluminación por luz posterior y por franjas a menudo dan como resultado imágenes que pueden ser segmentadas mediante umbrales globales.
I1
Cuando T depende sol: de f (i, j)
1
3.3.1 Selección automatizada del umbral para binarización. ii
Selección de umbral a partir de Histogramas de nivel de gris:
El umbral óptimo se selecciona [7] por el criterio de discriminación, maximizando la separabilidad de las clases resultantes en niveles de gris. Usa sólo los momentos acumulativos de O y 1 orden del histograma de nivel de gris y puede extenderse al problema de umbral múltiple.
Los pixeles de una figura dada se representan en L niveles de gris [1,2,3..L] 11
El numero de pixeles'ien el nivel i es denotado por ni, y el número total de pixeles por X = a1 + n2 + 113 + ...+ nL
. . ', . . . . . '. .I
1 , . . ' ' . .. . , . ,. . . ' . . . ,' . -. . . , . . .
, . . .
.,' . ,, . , .. , , .,* , . .
. ' , . , ;# . .: . ~ ? . .
-
27
'1 Para simplificar la discución, el histograma de nivel de gris es
normalizado y considerado como una distribución de probabilidad.
I1
Ahora supongamos que dividimos los pixeles en dos clases Co y C1 (fondo y objetos) para un'' umbral en nivel k; Co denota pixeles con niveles [1,2..k], C1 denota pixeles con niveles [ k t l , .. L]. Por tanto las probabilidades de ocurrencia de clase y los niveles medios de clase, respectivamente son dados por
Probabilidades de ocurrencia de clase:
W e = P, ( C o l 3 p i = 11
k ,t
I f I, w(k)
Niveles medios de clase: ,I
Donde .: 1
k.
i=l uíkk> pi
Son los momentos de orden O y 1 acumulativos del histograma en el k-ésimo nivel del histograma y
es el nivel medio total de la imágen original. Podemos verificar la siguiente relación para cualquier opción de k:
-
'I I1
11.
'4 p s + q f 1 = p 1 ; VI' W f l 1,
la varianza de. clases está dada por :
-- 28
esto requiere momentos acumulativos de 2do. orden (estadísticos). COI objeto de evaluar el umbral, en el nivel k, introduciremos el siguiente criterio discriminante de medida (o medida de separabilidad de clases] usado en el análisis discriminante [E]:
-
1'1 Vr =
'1
son la varianza de clase dentro, entre y total de niveles respectivamente. A s í nuestro problema se reduce a un problema de opthización para buscar un k que maximize una de las funciones objetivo(medidas de criterio). Esto es porque las clases serán separadas en niveles de gris y consecuentemente un umbral dando la mejor separación de clase en niveles de gris será el mejor umbral. La siguiente relación básica,prevalece:
Donde : GI2
son funciones de k, y
q2
G2
Q-2
i
9
i
es independinte del nivel k.
Se nota que :
se basa en estadísticas de,,2do. orden (varianza de clase), mientras que
6e basa en estadísticas de ler. orden (medias de clase). Por tanto :
ES la medida más simple con respecto a k. A s í adoptamos a :
:om0 el criterio de medida para evaluar la mejor separabilidad. El umbral óptimo k* que maximiza a :
r que equivalentemente maximiza a :
(c ,( '. ie selecciona en la búsqueda secuencia1 :
f
(c 'I - ie selecciona en la búsqueda secuencial :
- 1
-
I1
;i
'! REFERENCIAS
[l] Mompín Poblet . J. l'SISTEMAS CAD/CAM/CAE DISEÑO Y
Serie Mundo Electrónido. ISBN: 84-267-0621-5
'!
121 Curso de Robótica Industria¡.. Div. de educación
FABRICACION .POR COMPUTADOR^^.
MARCOMBO S.A. BARCEMNA ESPAÑA.
continua UNAM, México'D.F.de1 11 al 15 de feb. de 1991.
PROCESSING FUNDAMENTALS" .Prentice Hall
mi
31 Galbiati Louis J. "MACHINE VISION AND DIGITAL IMAGE
ISBN : 0-1 3 -5 4.2 O 4 4 -X !I
41 Fu/.González/¿ee '"ROBO$ICA CONTROL, DETECCION, VISION E 4 INTELIGENCIA" Mc. Graw Hill. ISBN: 84-7615-214-0
51 GAUTHIER/DUQUE/CWíG,O "ALGUNAS REALIZACIONES EN EL CAMPO DE LA VISION ARTIFICIAL1t IV Conqreco 'I Centroamericano de c'ontrol automáticó Puebla, Puebla Mexico, nov.1990 PP 6:41-648.
li, 6 1 Preliminary Reference Manual The VImager/-10 Librery
VIiO.lib v1.0, AITecli International Corp. 1989. !! 1
y I1 . &
.1)1
ill .:; I
-
31 4- iI iI 11 I1 I1 11
I1
I1
171 N. Otsu "A THRESHOLD SELECTION METHOD FROM GRAY IXVEL HISTOGRAMS1g. IEEE Trans."on cyst. man and cyber.Vo1 SMC-9(1), jan 1979, pp. ,!62-66.
[E] M.James glCLASIFICATION iiiLGORITHMSgl.William Collins Sons and Co.Ltd 1985.
'I 'I
11 '
I
-
CAPITULO 4
Visión de A l t o Nivel:
Segmentación, Descripción y Reconocimiento.
-
\ 32
En este capítulo se describen los elementos que integran la visión de alto nivel en una máquina de\visiÓn, dando para cada uno de ellos una descripción generalizada del concepto, así como el análisis de algunas técnicas más comúnmente utilizadas en el campo de la visión artificial para aplicaciones del tipo industrial.
4 . 1 Segmentación de la imagen.
Como se mencionó en la sección 4 del capitulo 2 , la segmentación es el proceso que separa los diferentes objetos que forman la imagen, ya que es la etapa previa a la descripción, reconocimiento e interpretación de la imagen.
Los algoritmos por lo general se basan [ 4 ] en uno de los siguientes principios básicos: discontinuidad y similitud. Los primeros se caracterizan por usar detección de bordes y los segundos por usar umbrales y crecimiento de regiones.
4.1.1 Algunas técnicas para segmentar imagenes.
Unión de borUes y detección de fronteras.- Las técnicas vistas en la sección 3.2.2 detectan discontinuidades de intensidad que darían como resultado pixeles en la frontera entre objetos y fondo, en la práctica debido al ruido(fal1as de origen), iluminación no uniforme y demás defectos producen discontinuidades de intensidad espúreos que rara vez caracterizan a una frontera. En consecuencia los algoritmos de detección de bordes vienen seguidos de procedimientos para reunir los pixeles de borde para constituir propiamente las fronteras de los objetos, aumentando el tiempo de proceso y complejidad de los algoritmos.
Existen técnicas basadas en la representación de segmentos de borde en forma de estructuras de grafos, donde se buscará aquellos grafos con caminos de menor coste que corresponderán a bordes significativos. Estas técnicas se comportan bien en presencia de ruido, pero tienen el inconveniente de que el procedimiento es más complicado y requiere mas tiempo de pr-oceso que el anterior.
segmentación orientaaa a regiones.- Sea R la región que incluye la imagen completa, se puede ver la segmentación como un proceso que divide R en n subregiones R l , R z r . . R 1 l tales que:
1, O R ~ R i=l 2, K es una región conectada, siendo i= 1,2, I I , ,n
3, RiARj =@ para todo i Y j, i f j 4, PtRi) UEPSiDRO para i = 1.2 , , , . , ,n 5, PRiVRj) = FALSO para it j
>
Donde P(Ri) es un predicado lógico definido sobre los puntos del conjunto Ri y O es el conjunto Vacío.
-
primera condición indica[4] que la segmentación debe ser completa o sea todos los pixeles deben estar en alguna región. La segunda condición dice que todos los puntos de una región deben estar conectados (este concepto se explicara más adelante). La condición tres dice que las regiones deben ser disjuntas. La condición cuatro indica las propiedades que los pixeles de una región segmentada deben satisfacer, por ejemplo que todos los pixeles de Ri deben tener la misma
, intensidad. La propiedad cinco nos dice que las regiones i y j son distintas.
crecimiento de regiones por adición de pixe1es.- Técnica que agrupa pixeles o subregiones en regiones más grandes. El método más simple es el de agregación o adición de pixeles, donde se comienza con un conjunto de puntos semilla y se hacen crecer las regiones afiadiendo a cada punto semilla aquellos pixeles vecinos que tengan propiedades similares(intensidad, textura, color, etc.)
Uno de los inconvenientes al aplicar este método es la selección de las semillas iniciales que representen adecuadamente regiones de interés y la selección de las propiedades adecuadas para asignar a los puntos a las diversas regiones en el proceso de crecimiento.
División y fusión de imágenes.- Una alternativa al método anterior es dividir sucesivamente la imagen en cuadrantes [12],[13],[14]. LLamamos R a la región que corresponde a la imagen completa, un método para segmentar R consiste en la división sucesiva en regiones cuadradas cada vez más pequeñas y siendo P un predicado, de tal forma que para cualquier región Ri, P(Ri) = VERDADERO. El proceso comienza en la región R. Si PiR)=FALBO, dividiremos la imagen en cuadrantes. Si P es falso para algún cuadrante, subdividiremos ése cudrante en subcuadrantes y así sucesivamente. Esta técnica de subdivisión se representa en forma de árboles cuaternarios (árbol donde cada nodo tiene cuatro hijos) , fig. 4-1 y para obtener regiones segmentadas utilizamos la fusión, donde dos regiones adyacentes Ri y Rk se unirán sólo si P(Ri U Rk)=VERDADERO. Una ventaja es que utiliza la misma representación de árbol cuaternario para la división y fusión. fig. 4.1.
-
Fig. 4.1 (a) Imagen dividida. (b) Arbol cuaternario correspondiente.
Uno de los inconvenientes en este método es que la imagen es analizada para todos y cada uno de los pixeles que la integran con objeto de generar la estructura de árbol realizando así el proceso de división y posteriormente hacer el recorrido de las hojas a la raiz para
-
!
'34 !
que integran
efectuar la
fusionar pixeles y obtener todos y; cada uno de los. objetos la escena.
I
Una de las ideas básicas en nuestro proyecto es segmentación en un minimo de tilempo y cumplir así con una de las restricciones F e todo equipo de yisión para aplicación industrial debe tener que son alta velocidad I de ejecución y coste minimo de implementación. I
I i
4.1.2 Imágenes binarias.- El áreb más práctica del procesamiento de imagenes 191 es el relacionado con imagenes binarias. El proceso de imagenes binarias es más fácil tanto desde el punto de vista teórico como desde el punto de vista práctico, ya que tienen bien definidas propiedades tales como fronteras, /áreas y formas. Debido a que sólo dos valores O y 1 se requieren para representar niveles de brillo, pueden ser procesadas usando operadores booleanos, los cuales son más rápidos de procesar que la aritmktica de punto flotante o entera.
Una imagen binaria puede representarse por un arreglo de unos y ceros y por eso puede ser manipulado mediante operadores booleanos mejor que con operadores aritméticos. Los operadores booleanos AND, OR, XOR y NOT son suceptibles de ser mapeados sobre una imagen binaria y producir resultados útiles. El efecto de los cuatro operaciones se puede ver en las siguientes tablas de verdad, fig. 4 .2 .
ntm OR
f I G . 4 . 2 . Tablas de verdad.
Propiedades.- Debido a que las imágenes binarias se forman sólo de pixeles de fondo y pixeles de objetos, sus fronteras están bien definidas, sin embargo puede no corresponder la imagen en niveles de gris al objeto en el mundo real del cual se deriva y que supuestamente representa, debido ésto al tipo de iluminación utilizado o bien al umbral seleccionado para binarizar la imagen.
La mayor parte del procesamiento de imágenes binarias se dedica a obtener medidas de la forma de la imagen como se presenta sin importar su relación con la realidad o con la imagen original en nivel de gris, ya que de eso se ocupa el sistema procesamiento/reconocimiento, tal como el que se desarrollará en el presente trabajo.
En un objeto binario es posible distinguir dos tipos de pixel: los pixeles interiores que no tienen vecinos inmediatos que formen parte del fondo, y los pixeles de borde que son aquellos 'que al menos tienen un vecino inmediato que forma parte del fondo. El conjunto de pixeles de
. .
-
35
borde forman una frontera o arista binaria para el objeto, la idea clave aqui son las conectividades: un pixel de borde está conectado ai fondo, mientras que un pixel interior no lo está. Un pixel puede estar conectado ya sea a sus 8 vecinos más,Cercanos, denominado 8-conectadoI o a sus cuatro horizontal y vertical vecinos, denominado 4-conectado, fig. 4.3
(a) (b) - ._ Fia. 4.3 Vecinos de un pixel, (a) 4-conectado
~ . . . (b) 8-conectado.
Así como las operaciones de convolución son las operaciones’básicas para imágenes con niveles de gris, las operaciones lógicas booleanas son el punto de partida para todo procedimiento de imagen binaria. Utilizando para ello operadores lógicos en lugar de operadores aritméticos y el resultado será asignado al pixel definido por el centro de la máscara. Un operador lógico booleano es :
ai, j = F(ai,j , y sus vecinos) Donde F es una función booleana hecha de cualesquier operadores
booleanos AND, OR, NOT ó XOR.
Un punto frontera como se mencionó es un pixel del objeto que tiene al menos un vecino que es un pixel del fondo. La condición que al menos uno de sus vecinos 8-conectados sea un pixel de fondo se puede escribir
B = (NOT al) OR (NOT a 2 ) OR (NOT as) OR (NOT a4) OR (NOT as ) OR (NOT a6) OR (NOT a7) OR (NOT as)
I Respecto a la mascara de convolución de la fig. 4.4.
Fig. 4.4 Los 8-vecinos del pixel a,,
El cuál será verdadero si cualquier pixel de al al ag tiene un valor de cero (pixel de fondo). Por tanto diremos que el resultado es verdadero tanto para pixeles de fondo como para pixeles que formen parte de la frontera de un objeto. Para puntos inferiores observamos que al no tener ningún vecino que sea fondo, el resultado del operador será falso,
-
I 36 I
f ig . 4 . 5 . S i e l valor de B es verdadero para puntos que son fondo y puntos que son frontera, es necesario hacer una discriminación y seleccionar sólo aquellos puntos que sean frontera, para ello utilizaremos la condición de que si B vale uno y a. es uno también, el punto en estudio a0 será un punto frontera. Esta condición se representa por :
a0 AND B
Como se mencionó en la sección referente al preproceso de la imagen, el ruido en la imagen genera la aparición de puntos aislados que no son otra cosa sino puntos de objeto (con valor 1) en los que sus 8- vecinos son puntos de fondo (con valor O), fig. 4.6.
. .
x.
Pixeles de fondo. . .
. . Hxeles frontera , .
Pixelrs interiom
Fig.. 4.5 Imagen binaria. Fig. 4.6 Pixel aislado.
Una función booleana local que dará el valor de uno para un punto aislado y cero para cualquier otro caso será :
B = (NOT ai) AND (NOT a2) AND (NOT a3) AND(NOTa4)AND(NOT as) AND (NOT ag) AND (NOT a,) AND (NOT as)
Es decir todos los 8-vecinos tienen que ser pixeles de fondo (con valor O) para hacer que B tenga valor de uno y así el operador lógico local para detectar un punto aislado será :
-
a0 AND B
4 .2 Descripción de la imagen.
El problema de descripción en visión consiste en la xtracción d ! características de un objeto para su posterior reconocimiento. Por regla general los descriptores deben ser independientes del tamaño, localización y orientación que tenga el objeto, es decir deben ser invariantes a cambios de escalación, traslación y rotación, además deben contener suficiente información de discriminación para diferenciar un objeto de otro. La descripción es un tema central en el diseño de los sistemas de visión, ya que los descriptores influyen en la complejidad y rendimiento de los algoritmos de reconocimiento. Los descriptores se clasifican en: descriptores de frontera, descriptores de región y descriptores adecuados para representar estructuras tridimensionales.
.. t '
-
I
37
Los descriptores de frontera son l o s que describen una región por la forma de su frontera, existen varias técnicas tales como:
-Códigos de cadena. Representan una frontera mediante un conjunto de segmentos con longitud y dirección especificadas.
-Signaturas. Representación funcional unidimensional de una frontera. Tales como la representación de la distancia del centro a la frontera como una función de un ángulo.
-Aproximaciones poligonales. Una frontera digital se puede aproximar con exactitud arbitraria mediante un pollgono. Esta técnica en la práctica se aplica para capturar la esencia de la forma de la frontera con el menor número de segmentos poligonales, ésta técnica no es trivkal y puede consumir gran cantidad de tiempo.
-Números de contorno. Estudia diversas características de una ,frontera codificada en forma de cadena, tales como: número de contorno, orden n de un número de contorno, eje mayor, eje menor, exentricidad de frontera, etc.
-Descriptores de Fourier. Utilizan la transformada de Fourier unidimensional discreta para describir una frontera bidimensional.
Descriptores de región. Describen un objeto mediante sus características internas. A diferencia de los descriptores anteriores que se basan en caractersticas de sus fronteras.
Gran número de sistemas de visión industrial se basan en descriptores de región de naturaleza sencilla y por tanto atractivos computacionalmente hablando. Alguno de ellos son :
-Area. El área de la región se define como el número de pixeles en el interior de su frontera. Es útil cuando la geometrla de la imagen es fija y los objetos . se ubican a una misma distancia de la cámara.
-Ejes mayor y menor. Son Útiles para obtener la orientación de un objeto. El cociente de las longitudes de estos ejes se denomina excentricidad de la región y es un descriptor importante de la forma del objeto.
-Perímetro. Es la l o n g i t u d de la frontera. Se suele utilizar en forma más frecuente mediante el concepto de compacidad y se - define como perímetro2/área. Ya que este valor es adimesional es por tanto insensible a cambios de escala.
-Número de Euler. Es el número de regiones conectadas menos el número de huecos,
-Momentos invariantes. De la misma forma que los descriptores de Fourier se utilizan para describir una frontera de una región, así cuando la región se da en términos de sus puntos interiores podemos describirla
-
mediante un conjunto de momentos que son invariantes a cambios posición, rotación y escalamiento.
En nuestro proyecto utilizaremos algunos de los descriptores región, ya que se facilita su cálculo debido a que los elementos necesarios para su determinación fueron obtenidos en la fase de segmentación.
de
de
4.3 Reconocimiento.
La función de los algoritmos de reconocimiento es el de identificar a cada objeto segmentado en una escena y asignarle una etiqueta (nombre). En la mayoría de los sistemas de visión, los niveles de reconocimiento trabajan sobre objetos que han sido ya segmentados como unidades individuales. Existen dos categorías: métodos de decisión teórica y los estructurales. Los primeros se basan en descripciones cuantitativas (estadísticos, de textura), mientras que los métodos estructurales usan descripciones simbólicas y sus relaciones (secuencias de direcciones de fronteras codificadas en cadena).
Métodos de decisión teórica.
Se basan en el uso de funciones de decisión (discriminantes), sea x=(x1,~2,..,x~)~ un vector patrón de compohentes reales, donde xi es el descriptor i-ésimo de un objeto dado (por ej. área, compacidad, algún momento invariante, etc.) . Dadas M clases de objetos representados por w~,w~,..,wM, el problema fundamental del modelo de reconocimiento de decisión teórica es la identificación de las M funciones de decisión d1(x),d2(x),..dM(x), con la propiedad que se cumpla la siguiente
relación para cualquier vector patrón x* perteneciente a la clase wi.
di(x*) < dj(X*) ; j = 1, 2, ..M ; j i -
O sea un objeto desconocido representado por el vector x* se reconoce como perteneciente a la clase de objetos i-ésimo si una vez sustituido x* en todas las funciones de decisión, di(x*) tiene como resultado el valor menor.
La mayor parte de las aplicaciones de estas funciones de decisión en sistemas de visión industrial se dan en la comparación del objeto a reconocer con patrones tipo.
Suponer que representamos cada clase de objeto de un vector prototipo (o medio):
N
-
39
--. Donde Xk son valores de muestre0 conocidos que pertenecen a la
clase wi.Dado un x* conocido, una manera de determinar a que clase pertenece es asignarle la misma clase que corresponde al vector tipo más cercano. Si usamos la distancia Euclidiana para determinar proximidad, .el problema se reduce a evaluar las siguientes distancias.
L D~(x*) = Ix* - mj I : j = 1,2,..,M Asociaremos x* con la clase wi si Di(x*) es la distancia más
pequeña.
relaciones geométricas referentes a la forma del objeto. Estas técnicas son de estricto carácter cuantitativo, ignorando las
I
Métodos estructurales.
A diferencia con las técnicas anteriores estos métodos estructurales realizan la discriminación de objetos atendiendo a sus relaciones geométricas.
El principio es la descomposición de un objeto en patrones básicos, fia. 4 . 7
C
(a) íb) (C) Fig. 4 . 7 Principo de descomposición de un objeto.
- La parte (a) muestra la frontera de un objeto simple, la parte (b)
muestra un conjunto de elementos básicos con una longitud y una dirección determinadas, la parte (c) muestra la frontera codificada con los elementos básicos, comenzando en la parte superior izquierda recorriendo la frontera en el sentido de las ahujas del reloj e identificando las apariciones de esos elementos básicos representando la frontera mediante la cadena aaabcbbbcdddcd. La longitud y dirección de esos elementos básicos junto con el orden en que ap-recen establecen la estructura del objeto.
Los métodos sintácticos son las técnicas más usadas en problemas de reconocimiento estructural. La idea básica del reconocimiento de patrones sintácticos es la especificación de, elementos básicos de patrones estructurales y conjuntos de reglas(en forma de una gramática) que gobiernan su interconexión.
-
113
121
131
[41
c51
161
171
[ E l
r91
REF E RE N C I AS
Mompín Poblet J. "SISTEMAS CAD/CAM/CAE DISERO Y FABRICACION POR COMPUTADOR". Serie Mundo Electrónico. ISBN: 84-267-0621-5 MARCOMBO S.A. BARCELONA ESPaA.
Curso de Robótica Industrial. Div. de educación continua UNAM, México D.F.de1 11 al 15 de feb. de 1991.
Galbiati Louis J. "MACHINE VISION AND DIGITAL IMAGE PROCESSING FUNDAMENTALS" Prentice Hall ISBN: O-13-542044-X
Fu/González/Lee "ROBOTICA CONTROL, DETECCION, VISION E INTELIGENCIA" Mc. Graw Hill. ISBN: 84-7615-214-0
GAUTHIER/DUQUE/CAMARGO "AiGUNAS REALIZACIONES EN EL CAMPO DE LA VISION ARTIFICIAL" IV Congreso Latinoamericano de control automático Puebla, hiebla México, nov.1990 PP 641-648.
Preliminary Reference Manual The VImager/-10 Librery VIlO.lib v1.0, AITech International Corp. 1989.
N. OtSU "A THRESHOLD SELECTION METHOD FROM GRAY LEVEL HISTOGRAMS". IEEE Trans. on syst. man and cyber.Vo1 SMC-9(1), jan 1979, pp. 62-66.
M.James "CLASIFICATION AiGORITHMS".William Collins Sons and Co.Ltd 1985.
M.James "PATTERN RECOGNITION". John Wiley and Sons. ISBN: 0-471-61120-4.
[lo] Alireza K./Yaw H. "INVARIANT IMAGE RECOGNITION BY ZERNIKE KOMENTS" IEEE Trans. on pattern analysis and machine intelligence, vol 12 No.5 may 90 pp. 489-497.
[ill Quezada C. Raúl "EL ROBOT INDUSTRIAL" Rev. Ingenieria y Tecnología, año 3, No. 7, enero-marzo 1989, p.p 1-5.
[12] Hanan Sam& "REGION REPRESENTATI0N:QUADTREES FROM BINARY ARRAYS" Computer Graphics and Image Processing 13, 99-93(1980).
40
-
41
, .. . ,, . . . . . .
1131 Ming/Grosky/Jaim "NORMALIZED QUADTREES WITH RESPECT TO TRASLATIONS" Computer Graphics and Image Processing 20, 72-81 (1982).
[14] Hanan Samet "NEIGHBOR FINDING TECHNIQUES FOR IMAGES REPRESENTED FOR QUAM'RGES" Computer Graphics and Image Processing 18, 37-57(1982).
1
. *.
-
CAPITULO ci
Implantación de una Máquina de Visión.
-
I 42
Este capítulo comprende máquina de visión orientada todo con los recursos de
el desarrollo completo para implantar la a nuestras necesidades y construida sobre hardware y software disponibles en el
Instituto. Esta máquina de visión junto con el módulo para accionar el manipulador(capitu1o 6), const,ituyen los elementos básicos para integrar nuestro sistema de visión, el cuál será tratado en el capitulo 7. Iniciaremos con implantar rutinas para visión de bajo nivel basados principalmente en la biblioteca de.funciones básicas. de procesamiento de ,imágenes proporcionada por el proveedor.de1 equipo de visión. En seguida se presenta el algoritmo generalizado de segmentación de imágenes desarrollado por' un servidor, así como la implantación de los módulos para descripción y.reconocimiento de, patrones. . . . .
1. '5.1 Rutinas'para visión de bajo nivel.
para las etapas de adquisición de imágenes y su preproceso se disp.one del siguiente equipo :
-'Cámara CCD i/2itkde propósito general, marca Pulnix,
- Tarjeta digitalizadzra VImager mod. 10 de AITech - Monitor Panasonic B/W con resolución' de 520x520
. .
mod. TM-20, con lentes zoom 18-10812.5.
international corp.. : .
pixeies. -.-.
Se cuenta también 'con la. bilblioteca VImager-10 versión 1.0 para .adquisición y tratamiento .de 'imágenes. Esta biblioteca [ 6 ] de funciones es compatible con el lenguaje Microsoft C"ver. 5.1, que es el lenguaje utilizado en.'el desarrollo.de1 sistema completo. ..
en. CD y la señal. de imagen es transmitida- de ,la cámara de TV a la tarjeta digitalizadora por medio de un cable -de video BNC en formato RS-170, pasando por el monitor de TV antes de que llegue a la tarjeta para su 'digitalización y almacenamiento, como se vió en la sección 1 del capitulo . 3 . La tarjeta se inserta en una de las ranuras o slots de la computadora, la cual tiene las siguientes características: Microprocesador Intel 80386, coprocesador matemático 80387, 1 Mbyte de v, .disco duro de 40 Mb. monitor VGA. La computadora inicialmente se encontraba conectada a la tarjeta controladora del robot por medio del puerto serial de comunicaciones coml, actualme'nte, se encuentra también conectada' al equipo de adquisición y preproceso de imágenes, para constituir así un sistema integral de manipulación robótica con capacidades de 'visión artificial. Esta disposición le da mayor, versatilidad pues la disposición anterior sólo contaba con un sistema de: alimentación de coordenadas por control numérico, el cuál era