Cinematica Cuerpo Rigido
18
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa Departamento Académico de Estructuras Curso: DINÁMICA Tema: CINEMÁTICA DEL CUERPO RÍGIDO Profesor: Ing. Luis Fernando Lázares La Rosa E-mail: [email protected]
-
Upload
ruy-vladimir-bizarro-ortiz -
Category
Documents
-
view
38 -
download
0
Transcript of Cinematica Cuerpo Rigido
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
Departamento Académico de Estructuras
Curso:
DINÁMICA
Tema:
CINEMÁTICA DEL CUERPO RÍGIDO
Profesor:
Ing. Luis Fernando Lázares La Rosa
E-mail: [email protected]
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
Índice:
-Introducción.
- Movimiento de Traslación:
a) Propiedades
b) Ecuaciones de movimiento.
- Movimiento de Rotación alrededor de un eje:
a) Propiedades
b) Ecuaciones de movimiento.
- Aplicaciones
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
Bibliografía:
-Mecánica Vectorial para Ingenieros - DINÁMICA
Autores: Beer F., Johnston R., Clausen W.
Mc Graw Hill
- Ingeniería Mecánica - DINÁMICA
Autor: Hibbeler R. C.
Pearson Educación
- Mecánica para Ingenieros - DINÁMICA
Autores: Merian J. L., Kraige L. G.
Editorial Reverté
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
INTRODUCCIÓN
La CINEMÁTICA es el estudio de la geometría del
movimiento aplicado a una partícula o a un cuerpo rígido y
se usa para relacionar el desplazamiento, la velocidad, la
aceleración y el tiempo sin hacer referencia a la causa del
movimiento.
Se estudiará la cinemática en el plano, o estudio de la geometría
del movimiento en un plano de un cuerpo rígido. Su estudio es
importante para el diseño de engranes, levas y mecanismos
empleados para muchas operaciones de máquinas. En ingeniería
civil es importante para interpretar el comportamiento y análisis de
elementos que por ejemplo integran una estructura.

UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
Cuerpo rígido: Es un sistema de partículas que mantienen
invariables sus distancias mutuas. Esta formulación es ideal ya
que todos los materiales sólidos cambian algo de forma cuando
se les aplican fuerzas. Si los movimientos asociados a los cambios
de forma son muy pequeños frente a los movimientos globales del
cuerpo, el concepto ideal de rigidez es aceptable.
-El diafragma rígido y la losa o placa al desplazarse rígidamente (sin deformación) puede trasmitir
el desplazamiento a otros elementos como muros, haciéndolos todos a la vez y de igual forma.
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
Se investigará las relaciones que existen entre el tiempo, las
posiciones, las velocidades y las aceleraciones de las distintas
partículas que forman un cuerpo rígido.
Es posible someter un cuerpo rígido a tres tipos de movimiento en el
plano, específicamente traslación, rotación en torno de un eje fijo y
movimiento plano en general.
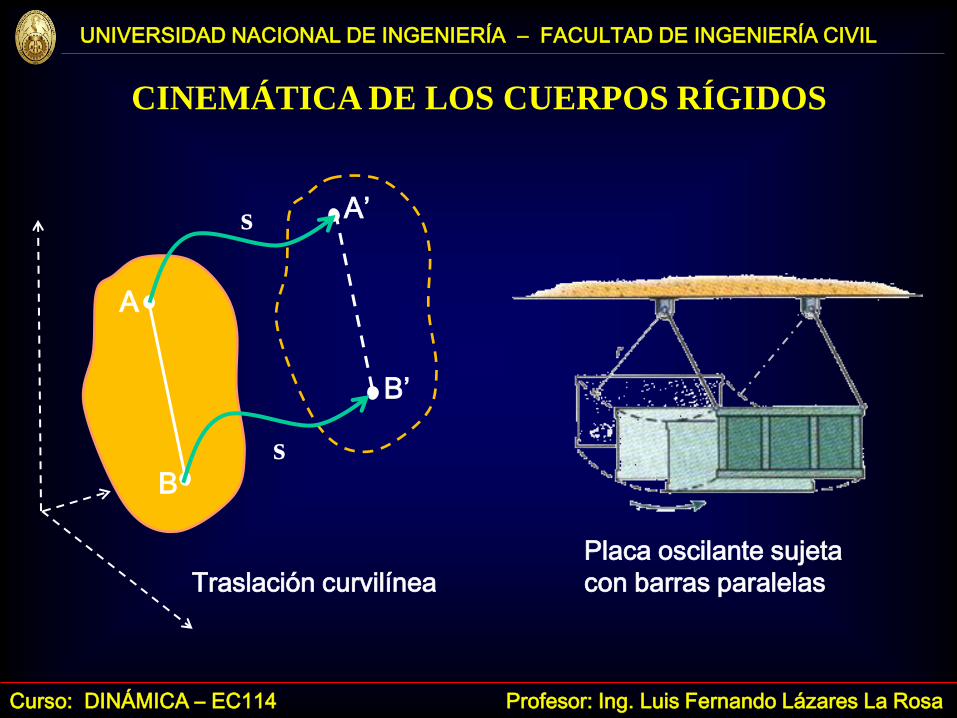
TRASLACIÓN: Un movimiento es de traslación si cualquier línea recta
de un cuerpo permanece en la misma dirección durante el movimiento.
Todas las partículas que forman el cuerpo se mueven a lo largo de
trayectorias paralelas. Si estas trayectorias son líneas rectas se dice
que el movimiento es una traslación rectilínea, si las trayectorias son
líneas curvas, el movimiento es una traslación curvilínea.

UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
A
B
A’
B’
s
s
Traslación rectilínea
A
B
A’
B’
s
s
Traslación curvilínea
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
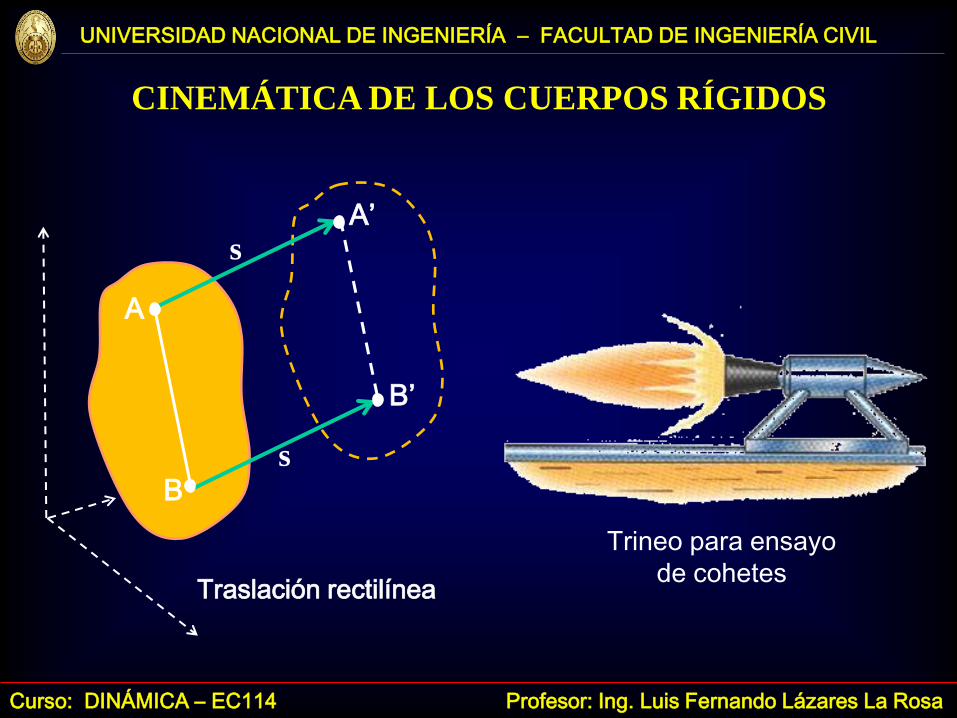
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
A
B
A’
B’
s
s
Traslación rectilínea
Trineo para ensayo
de cohetes
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
A
B
A’
B’
s
s
Traslación curvilínea
Placa oscilante sujeta
con barras paralelas
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
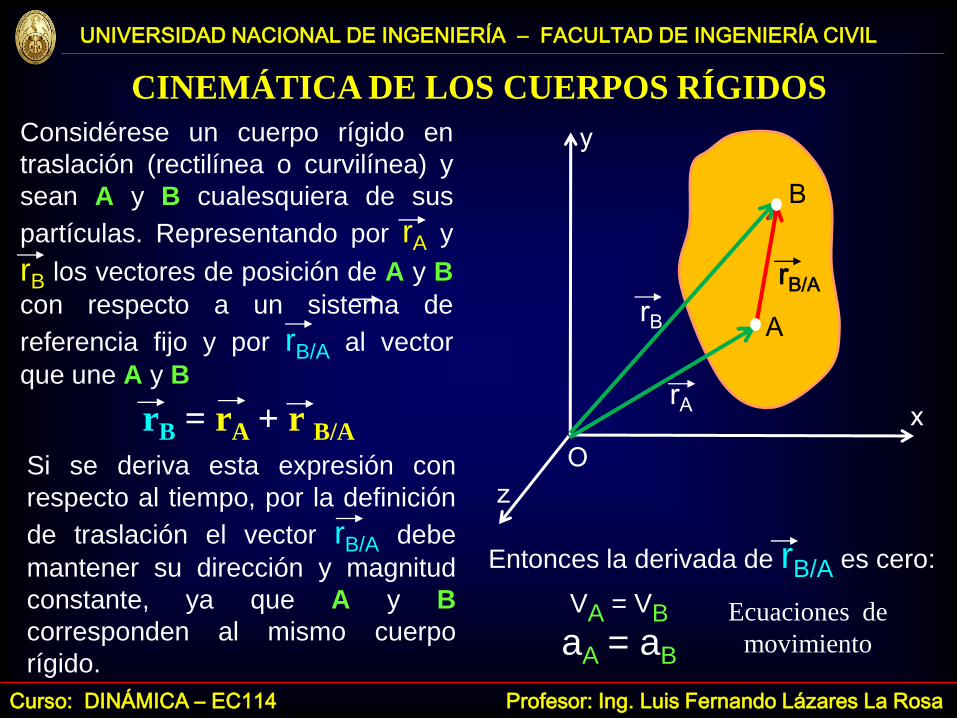
Considérese un cuerpo rígido en
traslación (rectilínea o curvilínea) y
sean A y B cualesquiera de sus
partículas. Representando por rA y
rB los vectores de posición de A y B
con respecto a un sistema de
referencia fijo y por rB/A al vector
que une A y B
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
rB = rA + r B/A
Si se deriva esta expresión con
respecto al tiempo, por la definición
de traslación el vector rB/A debe
mantener su dirección y magnitud
constante, ya que A y B
corresponden al mismo cuerpo
rígido.
Entonces la derivada de rB/A es cero:
VA = VB
aA = aB
y
rB
rA
rB/A
A
B
x
z
O
Ecuaciones de
movimiento
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
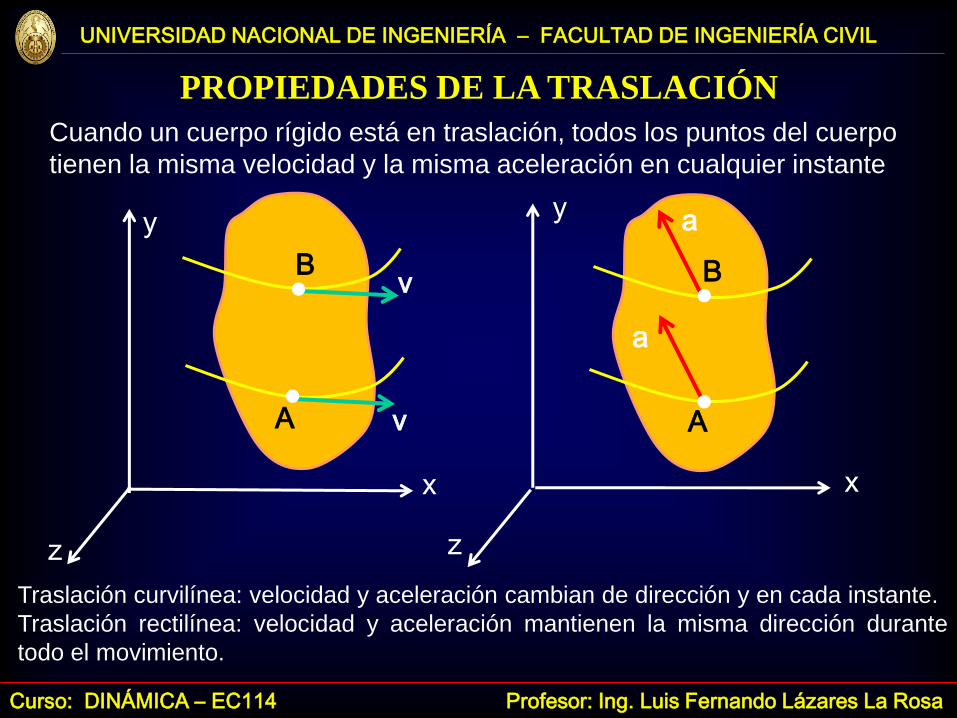
Cuando un cuerpo rígido está en traslación, todos los puntos del cuerpo
tienen la misma velocidad y la misma aceleración en cualquier instante
PROPIEDADES DE LA TRASLACIÓN
Traslación curvilínea: velocidad y aceleración cambian de dirección y en cada instante.
Traslación rectilínea: velocidad y aceleración mantienen la misma dirección durante
todo el movimiento.
x x
y y
z z
A A
B B
v
v
a
a
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
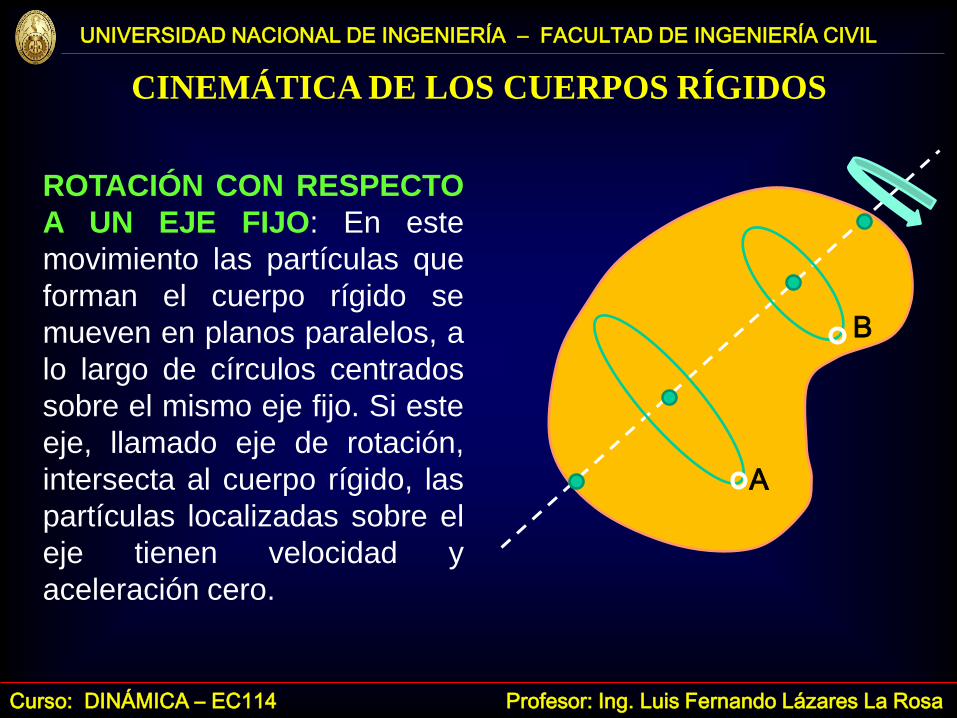
ROTACIÓN CON RESPECTO
A UN EJE FIJO: En este
movimiento las partículas que
forman el cuerpo rígido se
mueven en planos paralelos, a
lo largo de círculos centrados
sobre el mismo eje fijo. Si este
eje, llamado eje de rotación,
intersecta al cuerpo rígido, las
partículas localizadas sobre el
eje tienen velocidad y
aceleración cero.
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
A
B
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
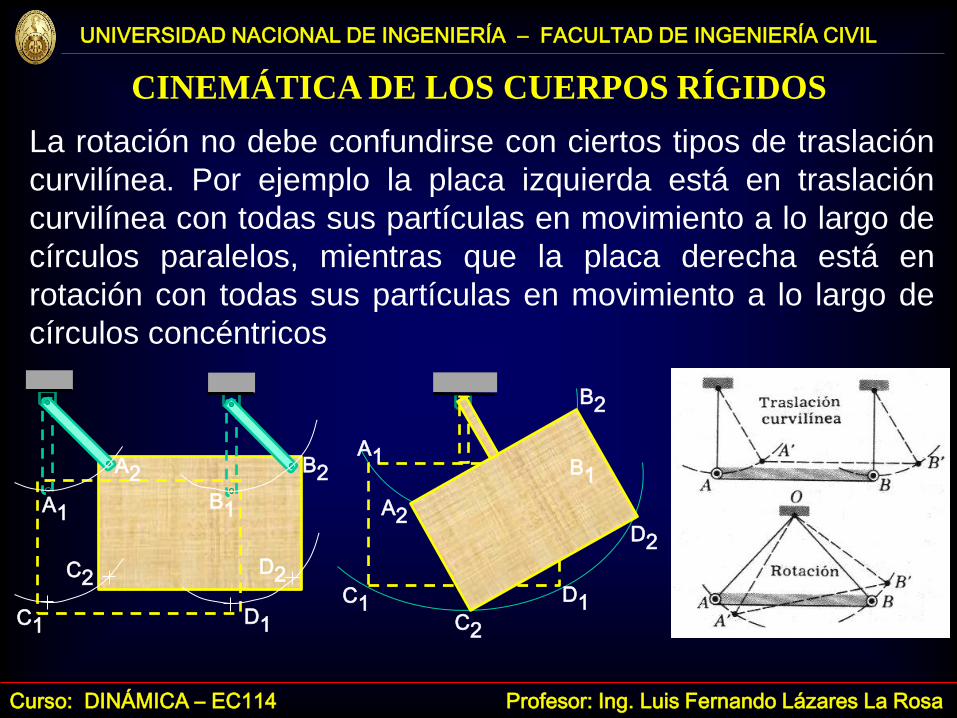
La rotación no debe confundirse con ciertos tipos de traslación
curvilínea. Por ejemplo la placa izquierda está en traslación
curvilínea con todas sus partículas en movimiento a lo largo de
círculos paralelos, mientras que la placa derecha está en
rotación con todas sus partículas en movimiento a lo largo de
círculos concéntricos
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
A1
A2
C1
C2
D1
D2
B1
B2 B1
B2
D1
D2
A1
A2
C1 C2
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
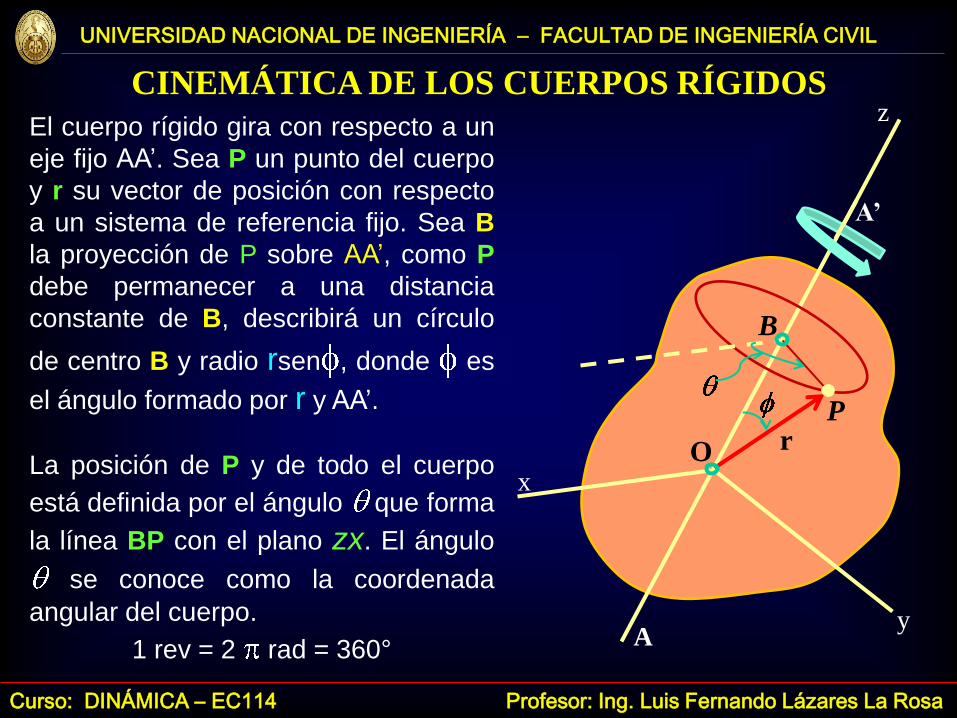
El cuerpo rígido gira con respecto a un
eje fijo AA’. Sea P un punto del cuerpo
y r su vector de posición con respecto
a un sistema de referencia fijo. Sea B
la proyección de P sobre AA’, como P
debe permanecer a una distancia
constante de B, describirá un círculo
de centro B y radio rsen , donde es
el ángulo formado por r y AA’.
La posición de P y de todo el cuerpo
está definida por el ángulo que forma
la línea BP con el plano zx. El ángulo
se conoce como la coordenada
angular del cuerpo.
1 rev = 2 rad = 360°
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
O r P
B
A
x
y
z
A’
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
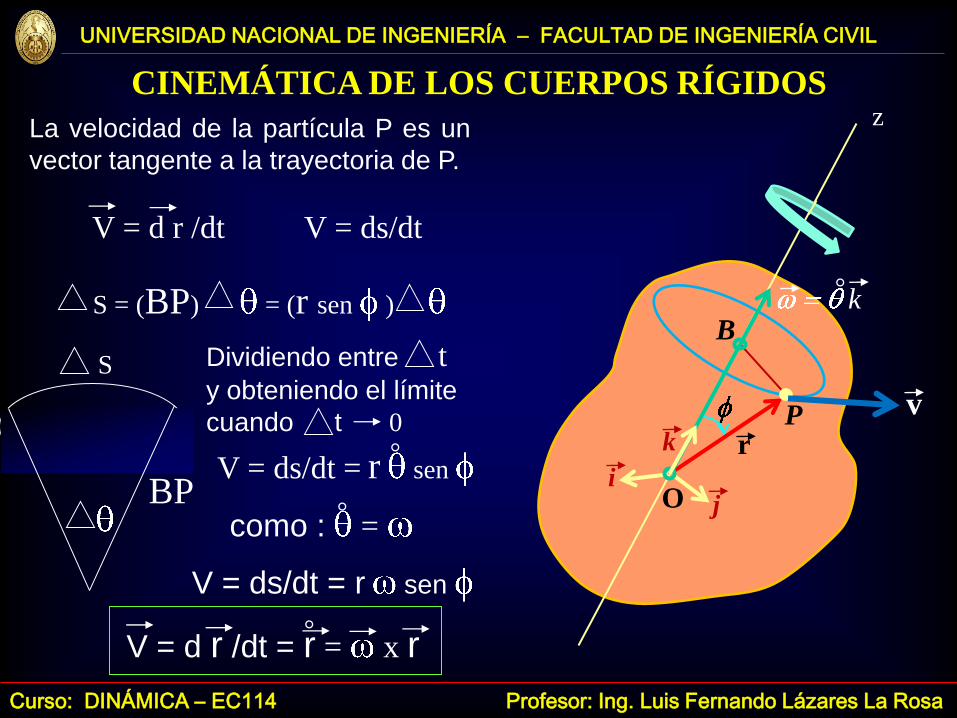
La velocidad de la partícula P es un
vector tangente a la trayectoria de P.
V = d r /dt V = ds/dt
S = (BP) = (r sen )
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
S
BP
Dividiendo entre t y obteniendo el límite
cuando t 0
V = ds/dt = r sen
V = d r /dt = r = x r
como : =
V = ds/dt = r sen
O
r P
B k
i j
z
k
v
°
°
°
°
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
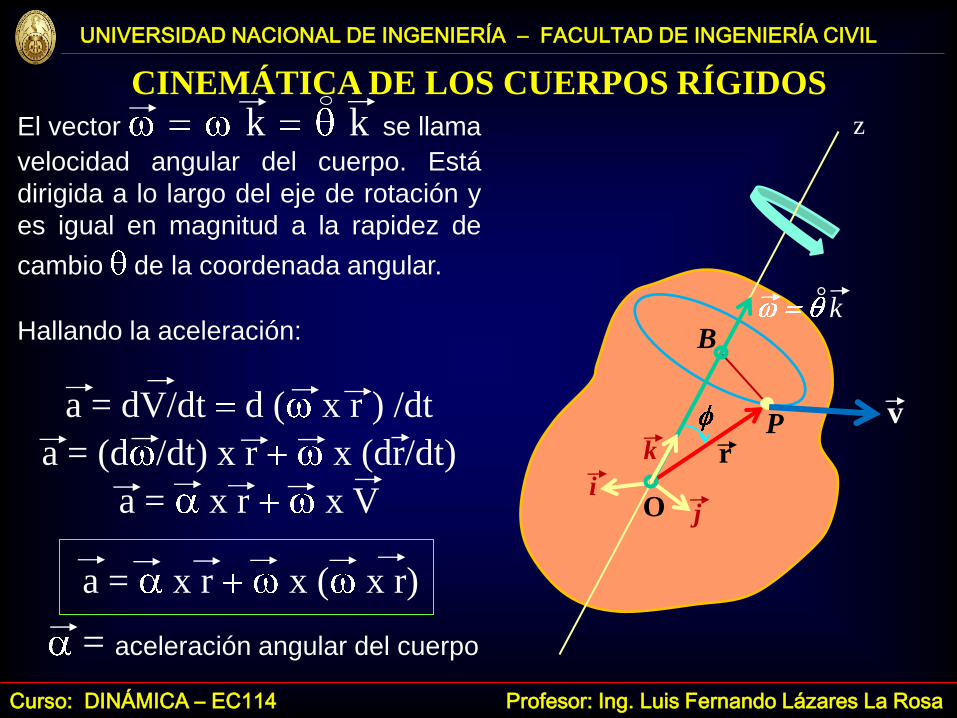
El vector k k se llama
velocidad angular del cuerpo. Está
dirigida a lo largo del eje de rotación y
es igual en magnitud a la rapidez de
cambio de la coordenada angular.
Hallando la aceleración:
a = dV/dt d ( x r ) /dt
a = (d /dt) x r x (dr/dt)
a = x r x V
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
a = x r x ( x r)
= aceleración angular del cuerpo
O
r P
B k
i j
z
k
v
°
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
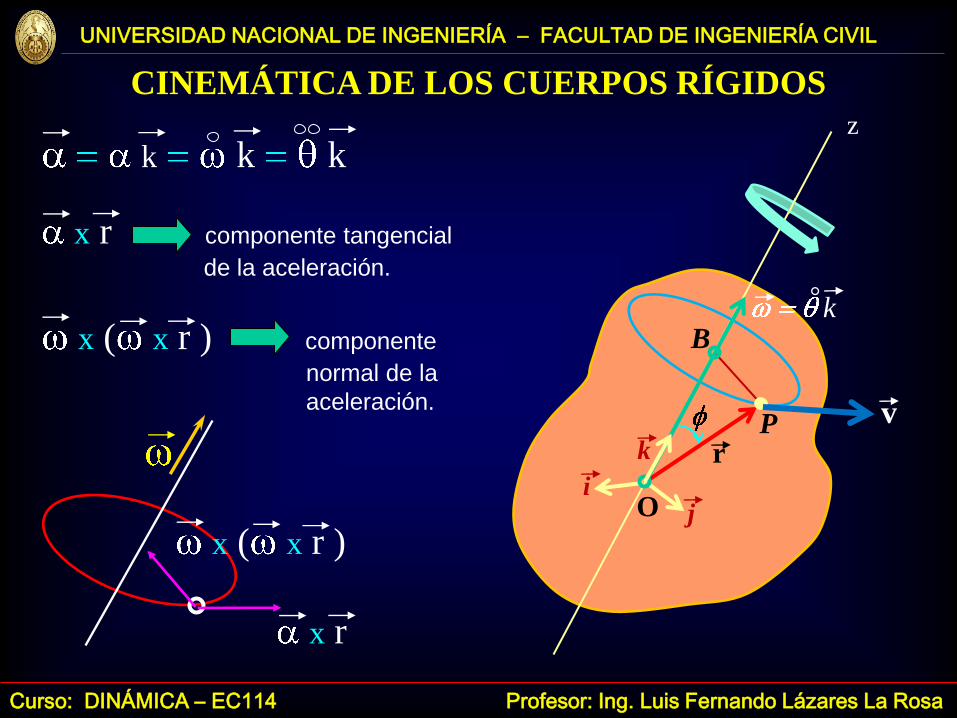
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
k k k
x r componente tangencial
de la aceleración.
x ( x r ) componente
normal de la
aceleración.
CINEMÁTICA DE LOS CUERPOS RÍGIDOS
x ( x r )
x r
O
r P
B k
i j
z
k
v
°
UNIVERSIDAD NACIONAL DE INGENIERÍA – FACULTAD DE INGENIERÍA CIVIL
Curso: DINÁMICA – EC114 Profesor: Ing. Luis Fernando Lázares La Rosa
an = r
a = x r x ( x r )
a = k x r r
k
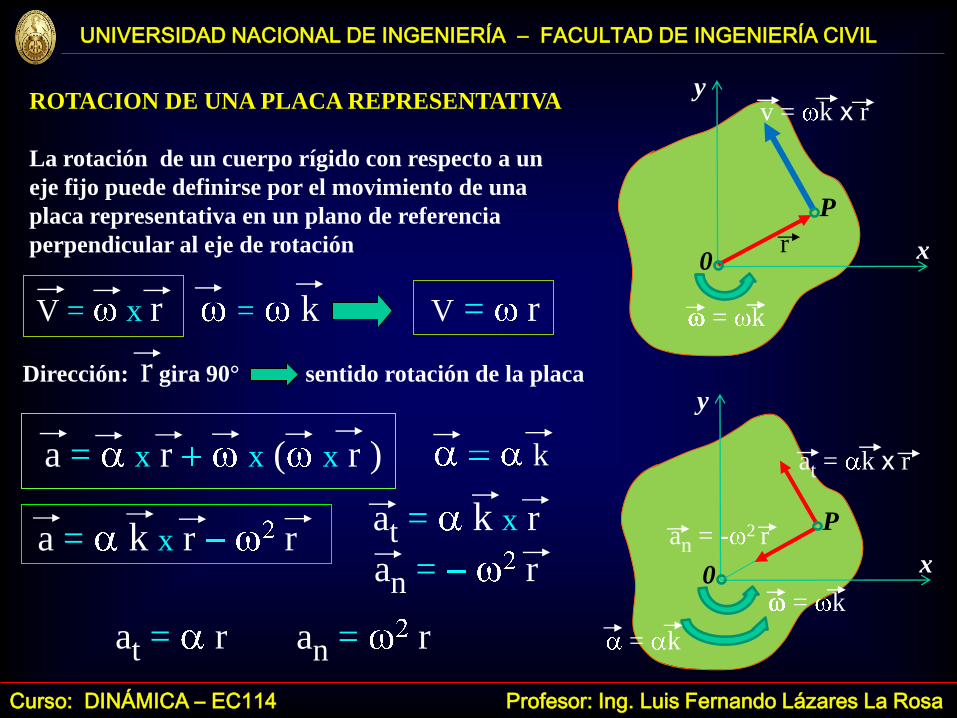
ROTACION DE UNA PLACA REPRESENTATIVA
La rotación de un cuerpo rígido con respecto a un
eje fijo puede definirse por el movimiento de una
placa representativa en un plano de referencia
perpendicular al eje de rotación
V = x r = k V = r
Dirección: r gira 90° sentido rotación de la placa
at = k x r
at = r an = r
v = k x r
= k
r
P
0 x
y
at = k x r
= k
an = - 2 r P
0 x
y
= k