cinematica uc3

If you can't read please download the document
Transcript of cinematica uc3
TEORA DE MECANISMOS 3.- CINEMTICA DE MECANISMOS
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
1
Cinemtica de mquinasEstudio cinemtico: determinacin deTrayectorias Velocidades Aceleraciones
Mtodos analticos y grficos Pares elementalesRotacin TraslacinUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
2
Rotaciones (Vectores deslizantes) Vectores deslizantes FUERZA Vectores deslizantes ROTACINReduccin del sistema de vectores deslizantes en un punto dado.
(Resultante de las fuerzas, Momento de las fuerzas) (Rotacin, Momento de la rotacin)
Velocidad NOTA: los vectores deslizantes se aplican sobre un slido rgido3
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
Fuerzas (Vectores deslizantes)
La reduccin del sistema de vectores Deslizantes FUERZA en un punto cualquiera P, consiste en : Posicionar el vector Resultante de las Fuerzas, en dicho punto P. Posicionar el vector Suma de los Momentos de las fuerzas respecto a dicho punto P.
Vectores deslizantes FUERZA
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
4
Reduccin sistema de fuerzas en un puntoEn el punto de contacto P El slido rgido superior Acta mediante un sistema Equivalente de vectores, Consistente en: - una resultante de las fuerzas Actuantes. - un momento suma de los momentos de cada una de las fuerzas en el punto P.Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
5
Rotaciones (Vectores deslizantes) Vectores deslizantes ROTACIN
La reduccin del sistema de vectores deslizantes ROTACIN en un punto cualquiera P, consiste en :
Posicionar el vector Resultante de las Rotaciones, en dicho punto P. Y Posicionar el vector Suma de los Momentos de las rotaciones respecto a dicho punto P. (VELOCIDAD DE P)
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
6
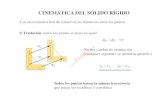
Rotaciones (Vectores deslizantes)El slido rgido afectado por un sistema de rotaciones, puede representarse por el esquema de la figura. Cada bastidor est bajo el efecto de una rotacin. Estando todos los ejes de rotacin de cada bastidor apoyados en el siguiente. Cualquier punto P del slido rgido est afectado por una rotacin suma de las de cada bastidor. Cualquier punto P del slido rgido est afectado por el momento suma de todas las rotaciones, es decir su velocidad.Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
w2
w1
SLIDO RGIDO
w3
w47
Movimiento general de un slido rgido
El sistema de referencia (SF) es fijo
VP = V0 + OP
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
8
Movimiento general en el planoSlido rgido
VP = V0 + OP
VI = 0
VP = VI + I P
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
9
CinemticaEcuaciones Mecnica (dado un SF, SM) Relaciones vectoriales (A, B a un slido rgido SR)
r ABS =rARR +rREL v ABS =v ARR +v REL aABS = aARR + aREL + aCOR IOLIS
r A =rAB +rB v A =v AB +v B + v REL aA = aAB + aB + aREL + aCOR IOLIS v REL = 0, aREL = 0, aCOR IOLIS = 0(Dado un SF, y un SM asociado al SR)
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
10
CinemticaEcuaciones Mecnica (dado un SF, SM)
Relaciones vectoriales (A, B a un slido rgido SR)r A =rAB +rB v A =v B + rAB + v AB
r ABS =rARR +rREL v ABS =v ARR +v REL aABS = aARR + aREL + aCOR IOLIS
d aA = aB + ( rAB ) + rAB dt+ aAB + aCOR IOLIS
= 0, aCOR IOLIS = 2 v rel = 0(Dado un SF, y un SM asociado a un punto del SR y // al SF)Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
11
Cinemtica de un eslabnPegados al eslabn en estudio en el punto C y paralelos al sistema fijo en todo momento Movimiento absoluto M 31 del eslabn 3 respecto a los ejes (absoluto) fijos ligados al eslabn 1
Velocidad de un punto genrico del eslabn 3
v31 = v3C + vC1Rotacin de 3 sobre C
Cinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
(arrastre)
M C1
Movimiento del punto C del eslabn 3 respecto a los ejes fijos ligados al eslabn 1
Movimiento absoluto del eslabn 3 (relativos) respecto a los ejes fijos ligados al Rotacin eslabn 3 alrededor de C
M 3C
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
12
Aceleracin en un eslabn (1)Si localizamos los ejes mviles pegados a un punto C del propio eslabn, y mantenemos el SM paralelo al SFa 31 = a 3C + a C1 + a COR IOLIS eslabna 31 = a 3C + a C1 + 0
Interpretacin:
a 31 = ROT + TRASTIERRA
a CORIOLIS = 2 SM V3C 00
Cinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
13
Aceleracin en un eslabn (2)
eslabna 31 = a 32 + a 21 + a COR IOLISCinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
a ABS = a ARR + a REL + a COR IOLIS v ABS = v ARR + v RELUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
14
Tcnicas de determinacin de velocidades
1. Mtodo de proyeccin o componente axial 2. Mtodo de las velocidades giradas 3. Cinema de velocidades 4. Mtodo de las velocidades relativas
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
15
1. Mtodo de proyeccin
A, B AB = cte v AB = 0
vASF Dado
AB
= vB
AB
vA
y la direccin de
vB
conocemos
vB16
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
2. Mtodo de las velocidades giradas (I) Tcnica grfica de clculo de velocidades Datos: C, v C y AEslabnVC C A'ISCAB
Incgnita: v Ac a
VA
A
S
B
VB
Cinema de velocidades de ABC (abc)
C'
sIs
B'
o b
1. 2. 3.
Giramos 90 sentido ESLABON
Giramos 90 en sentido contrario a ESLABON el segmento A A' obteniendo v A Universidad Carlos III de MadridDepartamento de Ingeniera Mecnica
vC obtenemos C Obtenemos A, siendo CA || C'A'
17
2. Mtodo de las velocidades giradas (II)v A A' Clculo de v N N' N'' v N NN'' v A A' Clculo de v M M ' M '' v M MM''
Cnema de velocidades de los eslabones:O 2 A oa O 4 B obCinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
AB ab18
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
3. Cnema de velocidades (I)Sea un eslabn y su CIR en un instante dado.rp
P
P eslabn:
v P = rP si = 1
k Vector unitario al plano v = k r P P Luego el vector velocidad se obtiene girando el vector posicin 90 en el sentido de la rotacin del eslabn y haciendo una expansin o contraccin de factor . Si lo realizamos para todos los puntos eslabn se obtendr, posicionando los vectores velocidad en el CIR, el cinema de velocidades (puntos homlogos de los del eslabn).
CIR
P eslabnUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
HOMOLOGA 90
P cnema19
3. Cinema de velocidades (II)Ejemplo de trazado del cinema de velocidades del mecanismo articulado plano para cada eslabn
Cinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
20
4. Mtodo de velocidades relativasSean A, B Eslabn
v A = v AB + v BRotacin de B sobre A Traslacin de B
vBBCinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
AB
vB v AB vA vA21
A
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
Cinema de velocidades del eslabn BCDEslabn (4)
Datos: v A
Tcnica del punto auxiliar: obtencin de la v x , a partir del esquema de velocidades del eslabn (4)
v X = v XB + v B v B = v BA + v A v X = v XB + v BA + v A Encontrar X (4) tal queLocalizar un punto de 4, por ejemplo C con velocidad de direccin conocida, de modo que X (4) est localizado de manera queUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
(2)
(1)
v XB || v BA BAX
v XC || v C
Cinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Cinema del punto auxiliar x22
Velocidades relativas. Mecanismo de correderaEslabn (deslizadera) (4)
Anlisis del punto C (C3 y C2 )Dato
v C3 = v C3C2 + vC2Dir. Dir. Tg. gua
Conocido el centro de curvatura de la gua por donde se desliza el eslabn (4), podemos sustituir el mecanismo por el cuadriltero articulado: O 2 , C0 , C, O3 en C se hace el clculo de
v C0Universidad Carlos III de Madrid Departamento de Ingeniera MecnicaCinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
v C3 = v C3C0 + v C0
Dir.
23
Polo de velocidades de un eslabnI13CIR del eslabn (3). es un punto mvil
La rodadura de la curva C m sobre la Cf define el movimiento del eslabnEslabn biela
Cm Cf
describe la curva polar
P3
A VA
3
B VB
2CIR del eslabn (2). Es un punto fijo
4O4
de los puntos de la biela posicionados en el sistema fijo a tierra
Cf Lugar geomtrico
Cm Lugar geomtrico
O2 CIR permanentes
1
1
de los puntos de la biela posicionados en el sistema mvil de la biela24
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
CIR del eslabn (4). Es un punto fijo
Curvas polaresVelocidad de cambio de polo
u
tangente a la curva polar (PROPIEDAD)
3Cm Cf
A
VA
B VB
CIR 3 CIR 3 Pt + t Pt en t + t en tPt Pt + t lim t t
I13
uA ud u uB u'd||AA0
Detalle:P
Componentes de Euler-Savary
||BB0
Cmu = ua + ud = = u b + u'd25
BUniversidad Carlos III de Madrid 0
A0
Cf
CIR del eslabn (3)
Departamento de Ingeniera Mecnica
Frmula de Euler-Savary (I)La componente de la velocidad de cambio de polo en la direccin paralela a la velocidad de un punto cualquiera del eslabn en estudio guarda relacin con la velocidad del punto segn las distancias del punto y del CIR al centro de curvatura de la trayectoria desarrollada por el A punto. vA Sea A el punto A perteneciente al eslabn CIR Sea A el centro de v A ACCA uA = curvatura de A IC uA
C CAUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
CA
26
Frmula de Euler-Savary (II)Relaciona: Velocidad de cambio de polo:d CIR i CIR i' t dS dS d B d A B vA = A = A A vB = B = B dt dt dt dt u=
u, , v, CIR
Vector unitario tangente Componentes de CIR i CIR i' dSCIR ,B = CC d B BVectores paralelos a d SA , d SBi B
dSCIR i ,A = CCA d A A
PROY. u dSA = u A = PROY. u dSB = u B =Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
dSCIR i ,A dt dSCIR i ,B dt
= =
CCA CIR i B CCB CIR i A
vA vB27
Velocidad de cambio de poloObtencin grfica. Aplicacin a la biela 3 de un cuadriltero articulado de la Frmula de Euler-SavaryA , v A , CIR 3 u A B , v B , CIR 3 u B u = u A + (u d ) u = u B + ' (u 'd )Velocidad cambio de poloUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
I13
Velocidad del punto B de la biela 3 Velocidad del punto A de la biela 3Cinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
28
Teorema de Kennedy (I)I13
I14 I23 I24 I21 I14
CIR relativo es el punto en el que la velocidad relativa entre dos eslabones dados se anula CIR A|B = CIR B|A Sea un mecanismo articulado plano: Sean 3 los eslabones: A, B, C. Los 3 CIR relativos 2 a 2 ESTN ALINEADOS
Teorema de los tres centros o teorema de Cinemtica y dinmica de Mquinas A. de Lamadrid, A. de Kennedy Corral, UPM, Madrid 1992Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
I AB , I BC , ICA Alineados29
Teorema de Kennedy (II)Sean: A, B, C los eslabones Sea Sea Sea
el CIR relativo de A|Bel CIR relativo de A|C
O el CIR relativo de C|B
v OA |B = v OA |C = rad
Al calcular las velocidades relativas respecto al eslabn B o C, se observa que son iguales, pues O es un punto CIR relativo
O
Para que sean iguales v OA |B , v OA |C ,O los tres CIR relativos , deben estar alineados30
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
Clculo de los CIR relativos usando el teorema de KennedyN eslabones N ( N 1) (CIR relativos) 2
1. Se calculan los CIR absolutos (N,1). 2. Se calculan los CIR relativos en las articulaciones (N,N-1). 3. Se calculan los CIR relativos en las deslizaderas ( guia ) 4. Se aplica el teorema de KennedyCinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
31
Escalas grficasEscala de longitudes Escala de velocidades Escala de aceleraciones cm grafi cos cm real
cm grafi cos cm seg real 2 =
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
32
Clculo de la aceleracin en puntos pertenecientes a un mismo eslabn (mismo SM)
d d
rB = rA + rBAdt dt
v B = v A + v BA a B = a A + a BAslido rgido B rota sobre A
Si A, B pieza
AB cte
rBA v BAUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
Posicin de B respecto de A velocidad de B respecto de A aceleracin de B respecto de A33
a BA
Posicin velocidad y aceleracin de arrastreP, se mueve respecto al sistema mvil El sistema mvil est parametrizado por la posicin del origen del sistema mvil (O) y el vector de rotacin ( ) del triedro mvil respecto al triedro fijo.SM O
rM vM aM
Posicin relativa velocidad relativa aceleracin relativa
Posicin, velocidad y aceleracin de arrastre
rarr = r0
SFUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
v arr = v 0 + rM
a arr = a 0 + rM + rM
(
)34
Estudio de la aceleracin (I)Pto A eslabn i Pto B eslabn i Pto C eslabn i+1SF i SM A B C i+1
SM pegado al eslabn i que rota con irespecto al SF
B i, rB = rBA + rA v B = v BA + v A a B = a BA + a A
C i + 1, rC = rCA + rA vC = vCA + v rel + v A a C = a CA + a rel + a A + a CORIOLIS
B rota sobre A con iUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
C rota sobre A con iRotacin SM
a C = a CA + a arr + a CORIOLIS35
Estudio de la aceleracin (II) Caso de movimiento circular 2 at = a n = Aceleracin de los puntos A y B piezaB A cte
d dt
v B = v A + v BAarrastre
Rotacin sobre A
BA
Rotacin
vAUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
a B = a A + a BA
a CORIOLIS = 0 v arr = 036
Ejemplos: Manivelaa A = a O + a AO CC O a AO = a t A + a n A
a AO = a t AO + a n AOCoincide el CIR = O Coincide el polo = O de aceleraciones En general, los puntos del slido con velocidad nula (CIR) y aceleracin nula (polo de aceleraciones) son distintos
CIR Polo aceleracionesUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
37
Aceleracin del polo del cnema de velocidadesI I ' I '' a 0a A = a I + a AII no es un punto singular en cuanto a aceleracionesI POLO VELOCIDAD
A
a
a A = a B + a BAUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
{, , a }A38
Polo de aceleraciones (I)
a A = a B + a BA ;a A = a I + a AI
A, B(a I 0 en general); A, I CIR
a P = 0 a A = a P + a AP a A = a APSi conocemos P, el cuerpo se comporta como un slido rgido en rotacin pura en ese instanteUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
P POLO DE ACELERACIONES
Modelo de comportamiento del eslabn en el instante t en cuanto a aceleraciones a XP39
Polo de aceleraciones (II)Polo aceleracin
P eslabon a P = 0a A = a AP a B = a BP
A
(
)
aAB
aB
a AP
Aceleracin relativa de A alrededor de P, con y del eslabneslabn
Cinema de aceleraciones
(A, B, C) (a, b, c)Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
40
Aceleracin normalConstruccin grfica del vector aceleracin normal relacionado con una rotacin (pura)Teorema del cateto Teorema de la altura
c m
h
n
h2 = m n c2 = m ( m + n )Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
Cinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Centro de rotacin41
Obtencin de la aceleracinObtencin de la aceleracin de un punto cualquiera del eslabn a partir de la aceleracin en A:
a B = a B|A + a A
donde se obtiene la aceleracin a partir de la cinemtica relativa de B respecto de A
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
Cinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
42
ejemploDatos: v A , a t A es decir, conocemos , 2 2 la secuencia grfica sera: 1. Obtencin grfica de a n A 2. Cinema del eslabn 2 3. Obtencin grfica de a n B|A 4. Obtencin grfica de a A a partir de a t A a nA y 5. Obtencin grfica de a n BCinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
43
ejemplo
datos v A , a t ACinemtica y dinmica de Mquinas A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Cinema de velocidades del eslabn 3
Cinema de velocidades del eslabn 5
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
Obtenemos a B conjuntamente con a A y tenemos el cinema de aceleraciones del eslabn 3 y obtenemos a C
44
Anlisis de aceleraciones (I) Piezas en contacto deslizanteEn piezas articuladasP 1 o 2articulacin
a P(1) = a P( 2)(1) ( 2)
P 1 2
vP = vP En piezas con contacto deslizante
v P(1) v P( 2 ) a P(1) a P( 2 )Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
Se conoce la direccin de la velocidad relativa
SM
P 1, 2345
1
2
Anlisis de aceleraciones (II)Considero A 1 y enclavo en l el SM 1 , 1
(
)
v A( abs ) = v A( arr ) + v A( rel )SM v A( 3) = v A(1) + v A(SM )v A( 3)3 1
v A(1)1 2
v A(SM )
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
46
Clculo de aceleraciones (III)
Clculo de a Adir arrt
a A = a O3 + a n A + a t Aa nA v2 = A O3 A
(1)a t A dir O3 A
a A = a arr + a rel + a cor (2)SM
a arr = a O1 + a narr + a t arr como si A 1dir arrn
a rel || O1P a cor = 2 1 v r ( O1P y v r )
Universidad Carlos III de Madrid Departamento de Ingeniera Mecnica
47
Clculo de aceleraciones (IV)Secuencia de clculo (1) (2) (3) (4) (5)
|| O3Aa n arr(2) (3)
o(1)
(5)
a nA
a tA
a t arr
a cor(4)dir a rel || O1P
|| O1PUniversidad Carlos III de Madrid Departamento de Ingeniera Mecnica
dir a t A
48