In uencia de la Transferencia Anal ogica en la resoluci on ...

Clase 07: Conversion Digital/Analogica, actuadores y control
de motoresSistemas Embebidos
Prof: Lic. Jose H. Moyano
Departamento de Ciencias e Ingenierıa de la Computacion
2019
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 1 / 49
Conversion Digital/Analogica
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 2 / 49
Conversion Digital/Analogica
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 3 / 49
Conversion Digital/Analogica
Los DAC son mas economicos que los ADC: no suele haber multiplexado de loscanales.
Filtrado: para eliminar el ruido/suavizar la senal
Amplificacion (analogica): para ajustar senal y operar en potencia
Transductor: el actuador a controlar
Ej: Mostrar temperatura:
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 4 / 49

Conversion Digital/Analogica
Conversor Digital/Analogico (DAC): a partir de valores digitales provistos por elmicrocontrolador genera una senal analogica.
Varios tipos de tecnicas:I Pulse Width Modulation (PWM)I Usando amplificadores sumadores analogicosI Amplificador sumador convencionalI DACs de resistencias en escaleraI Usando decodificadoresI Codificacion de Termometro (notacion unaria).I Hıbridos: combinan las tecnicas anteriores.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 5 / 49
PWM
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 6 / 49
Amplificadores sumadores analogicosAmplificador sumador convencional (peso binario a cada bit)
DACs de resistencias en escalera
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 7 / 49
Amplificadores sumadores analogicos
Amplificador sumador convencional(peso binario a cada bit)
DACs de resistencias en escalera
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 8 / 49

DAC con decodificadores
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 9 / 49
Interfaces y actuadores
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 10 / 49
ActuadoresActuar sobre entorno: tarea usual en Sist. Emb.:
Producir movimiento: lineal (solenoides), angular (servo motores), etc.
Accionar valvulas y/o mecanismos neumaticos
Controlar termostatos
Implementar herramientas de Control Numerico Computarizado (CNC): (ej: tornos,fresadoras, etc.).
etc.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 11 / 49
Motores de corriente continua
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 12 / 49

Motores de corriente continua
Simples de manejar.
Giran mientras se les aplica corriente.
Utiles cuando se requiere alta velocidad y eficiencia (en relacion al consumo) delmotor pero no tanta precision en el control.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 13 / 49
Motores de corriente continua
Dos tipos principales:
Con escobillas (brushed DC motors): Conmutacion mecanica
Sin escobillas (brushless DC motors): Conmutacion electronica
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 14 / 49
Controlando Motores DC
En motores DC principalmente se efectuan dos tipos de control:I Control del sentido de rotacion.I Control de la velocidad/torque del motor.
Se les pueden incorporar encoders (mecanismos de sensado de la posicion del eje)para lograr un control mas preciso (control realimentado).
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 15 / 49
Puente HControl de sentido de giro
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 16 / 49

Controlando Motores DC
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 17 / 49
Puente H y cuestiones electricas
Puente H de control:
Hay que controlar eltemporizado de laconmutacion para evitarcortocircuitos.
Hay que evitar que las lıneasde control floten libremente alinicializar el sistema.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 18 / 49
Puente H y cuestiones electricas
Puente H de control:
Las propiedades constructivasde los transistores tambienpueden desencadenar un corto(capacidades parasitas).
Se atenua el efecto,minimizando la impedanciadel driver.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 19 / 49
Controlando Motores DCL293D ASIC Dual H-Bridge
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 20 / 49

Controlando giro con PWM
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 21 / 49
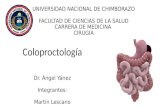
Controlando giro con PWMControlando la velocidad
La respuesta ante la senal PWM no es instantanea (inercia).La velocidad alcanzada no es lineal en funcion del PWM duty cycle: se requierecalibracion
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 22 / 49
Controlando Motores DCPueden requerir realimentacion para facilitar el control (giran libremente mientrasreciben tension)
I Shaft encoders opticosI Shaft encoders magneticos (sensores de efecto hall)
Esta es la unica manera de conocer la velocidad de giro de manera precisa:I Ante cargas variables.I Para compensar las no linealidades y los errores.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 23 / 49
Controlando Motores DC
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 24 / 49

Controlando motores DCExisten ASICs de control realimentado de motores de corriente continua:
Ej: LM628: DAC +PowAmp
Ej: LM629: H-Bridge(PWM)
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 25 / 49
Controlando Motores DC
Para frenar motor:I Desconectar el motor del circuito y que gire libremente hasta detenerseI Frenar el motor conectando las senales 2 y 4 o 1 y 3.I Poner la velocidad a cero (senal PWM nula)
La unica forma de ejercer un control preciso es utilizando realimentacion (vıaencoders) para medir velocidad y posicion.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 26 / 49
Motores paso a paso
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 27 / 49
Motores paso a paso
Se mueven un angulo prefijado (gran control de la posicion angular del eje, enteorıa).
Pueden controlarse sin realimentacion (control de lazo abierto), pero:I Tienen caracterısticas de inicio difıciles de manejarI Muestran resonancia mecanica a ciertas velocidadesI Buen torque a bajas velocidades, pero decrece al acelerar (velocidad maxima
limitada).
Esto puede hacer perder la sincronizacion entre el stepper y el sistema de control.
Mas complejos de manejar que los motores DC.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 28 / 49

Motores paso a paso
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 29 / 49
Motores paso a pasoCrean un campo magnetico en el estator, al cual se alinea el rotorVarios tipos:
I Reluctancia variableI Magneto permanente (mas torque que RV)I Hıbridos (anaden dientes a los de MP)
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 30 / 49
Motores paso a paso
Varios tipos:
Unipolares: Bobinadosconectados a V+ en el centro
Bipolares: Bobinados sinconexiones comunes
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 31 / 49
Motores paso a paso
Varios tipos:I Unipolares:
F Bobinados conectados a V+ en el centroF Mas simple invertir el sentido de rotacionF La logica de control es mas simple
I Bipolares:F Bobinados sin conexiones comunesF Requieren puentes H para invertir el sentido de marchaF Logica de control mas complejaF Mas potentes a igualdad de voltaje y corriente.
Existen multiples combinaciones de bobinados y conexionados. . .
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 32 / 49

Controlando motores paso a paso
Varios tipos:
Unipolares: Bobinadosconectados a V+ en el centro
Bipolares: Bobinados sinconexiones comunes
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 33 / 49
Controlando motores paso a pasoProblemas con la resonancia mecanica:
Si el campo magnetico se establece enel estator, el rotor se alinea con ciertainercia que introduce oscilaciones hastaalcanzar la alineacion final.
La frecuencia de dichas oscilacionesdepende de las caracterısticasconstructivas del motor y de la cargaasociada.
Si la tasa de stepping se aproxima a la frecuencia de resonancia del motor, este pierdetorque (puede causar salteo de pasos y perdida de sincronizacion).
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 34 / 49
Controlando motores paso a pasoProblemas con la resonancia mecanica:
En aplicaciones con una unica tasa destepping, es sencillo evitar laresonancia.
En aplicaciones donde la tasa destepping varıa, hay que estudiar esteaspecto cuidadosamente (evitar operarel motor en las tasas problematicas).
Esto puede requerir introducir en el diseno algun encoder que realimente al sistema decontrol con informacion acerca de la posicion angular del eje del motor.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 35 / 49
Controlando motores paso a paso
Problemas con la resonancia mecanica:
I perdida de torqueI Perdida de sincronizacion
Ej: Variar la aceleracion para evitar lasfrecuencias de stepping resonantes.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 36 / 49

Half-stepping
Incrementa la precision en la rotacion.
Consiste en colocar el rotor enposiciones intermedias entre dos pasosconsecutivos.
Se logra energizando simultaneamentemas de un bobinado.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 37 / 49
Half-stepping
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 38 / 49
Microstepping
Llevar el esquema mas alla para lograrmas posiciones intermedias (mayorprecision).
Senal de driving obtenida a partir deun DAC (aproximacion discreta de unacurva continua de control).
Reduce problemas de resonancia (pasosmas cortos, menos oscilaciones).
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 39 / 49
Driver para stepper
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 40 / 49

Control chopper
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 41 / 49
Control chopper
Control Chopper en motores stepper: Para alcanzar mas rapidamente el torque deseado.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 41 / 49
Control chopperL297 ASIC
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 42 / 49
Servomotores
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 43 / 49

Servos
Tipo particular de servomecanismo (actuador mecanicocontrolado – con sensor/encoder y realimentacion).
Hay servomotores de diferentes calidades. Los massimples, usados en modelismo (motores DC c/logica quepermite posicionamiento angular preciso del eje en rangoaproximado de 180).
I Potenciometro a la salida del eje (encoder)I Caja de reduccion (mayor torque)I Logica de comparacion de ancho de pulsos (PWM)
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 44 / 49
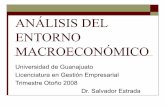
Controlando servos
Permiten posicionamiento angularpreciso.
Dado un tren de pulsos de entrada(PWM), en funcion del ancho de cadapulso se obtiene una posicion angularen el eje del motor
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 45 / 49
Controlando servos
A diferencia de PWM p/controlar un motor DC, donde la amplitud del pulso definela velocidad del motor, en el caso de los servos, la amplitud del pulso define laposicion angular del eje.
Hay que mantener la senal PWM para mantener el servo en posicion fija.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 46 / 49
Servos
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 47 / 49

Servos
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 48 / 49
Referencias
Braunl, T. Embedded Robotics: Mobile Robot Design and Applications withEmbedded Systems 3rd Edition. Springer. 2008. ISBN: 978–3540705338. Capıtulo 3.
Ganssle, J. Embedded System — World Class Designs. Newnes. 2007. ISBN:978–0750686259. Capıtulo 11.
Wilmshurst, T. Designing Embedded Systems with PIC Microcontrollers: Principlesand Applications. Newnes. 2006. ISBN: 978–0750667555. Capıtulos 8 y 11.
Prof: Lic. Jose H. Moyano (Departamento de Ciencias e Ingenierıa de la Computacion)Clase 07: Conversion Digital/Analogica, actuadores y control de motores 2019 49 / 49