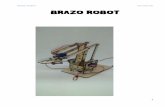
Construcción de brazo robot
4
15/1/2015 Construcción de brazo robot file:///tmp/15.html 1/4 Diciembre 2014 Robótica Educativa: brazo robot CEP Jaén José Antonio Vacas @javacasm Construcción de brazo robot Indice
-
Upload
jose-antonio-vacas -
Category
Technology
-
view
172 -
download
12
Transcript of Construcción de brazo robot

15/1/2015 Construcción de brazo robot
file:///tmp/15.html 1/4
Diciembre 2014
Robótica Educativa: brazo robot
CEP Jaén
José Antonio Vacas @javacasm
Construcción de brazo robot
Indice

15/1/2015 Construcción de brazo robot
file:///tmp/15.html 2/4
IntroducciónMontajeProgramación básica (remoto)Aprendizaje movimientosProgramación intermedia (automatismos)Geometría y cálculo de movimientosProgramación avanzada (cinemática)TrayectoriasInteligencia Artificial
Usos
Modelos
Para aprender
Coursera (https://class.coursera.org/conrob-002/wiki/GettingStarted2)
Curso (https://sites.google.com/site/mrjoneswac/yr10-information-software-technology/robotics)
Son robots destinados a mover mercancías que suelen necesitar empaquetadoSuelen tener varios grados de libertadSe asegura mecánicamente movimientos paralelos al plano de la superficie
Podemos mover la posición de la pinza a cualquier coordenada
Modelo (http://www.thingiverse.com/download:700212)
Introducción
Modelo
Robot paletizador
Montaje

15/1/2015 Construcción de brazo robot
file:///tmp/15.html 3/4
Imágenes montaje(https://plus.google.com/photos/+JoseAntonioVacasMartinez/albums/6104532387156704385/6086468918652827330?authkey)
Próximamente(https://plus.google.com/photos/+JoseAntonioVacasMartinez/albums/6104537620024206273?authkey=CLj5-ZeNrcTCCQ)
Definimos la actuación directa sobre los distintos motores.Realizamos movimientos simplesSiempre trabajamos con las coordenadas relativas (propias del robot)
http://www.thingiverse.com/download:700213 (http://www.thingiverse.com/download:700213)
Se incluye la capacidad de aprender movimientosMemorización de posicionesDefinición de entrenamiento
A partir de posiciones predefinidas se realizan movimientos entre las mismasNo existe el concepto de trayectoria
Se definen las transformaciones de coordenadas relativas a absolutas
A partir de las transformaciones (bidireccionales) se definen programaciones avanzadasEl destino ya se expresa en coordenadas absolutas
Programación básica (remoto)
Aprendizaje movimientos
Programación intermedia (automatismos)
Geometría y cálculo de movimientos
Programación avanzada (cinemática)

15/1/2015 Construcción de brazo robot
file:///tmp/15.html 4/4
AceleracionesOptimizacionesCálculo para Evitar obstáculos
Se le dota al robot de sistemas de reconocimiento del entornoCapacidad para evitar obstáculosDetección de objetos
Trayectorias
Inteligencia Artificial)