Control Lg

of 4
-
Upload
totto-alves -
Category
Documents
-
view
218 -
download
0
description
Teoria
Transcript of Control Lg
-
Acciones bsicas de control 97
E.T.S.I. INDUSTRIAL DE BEJARUNIVERSIDAD DE SALAMANCA
CAPITULO 7
ACCIONES BASICAS DE CONTROL
-
98 Problemas de ingeniera de control
CONTROL ON-OFF
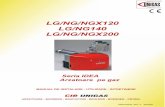
7.1) Muchas granjas utilizan un control todo-nada (ON-OFF) para regular el nivel de lquidode un depsito de abastecimiento . El nivel H del depsito se mide con un flotador, el cual puede abrir o cerrar un interruptor que controla el electroimn de accionamiento de la vlvulade entrada, de manera que permita el paso de un flujo total (ON) o nulo (OFF) hacia el depsito.Si el tanque tiene una seccin A y se supone, en primera aproximacin, que el caudal de salidaes proporcional al nivel de lquido en el depsito ( Q = k H ), calcular:s
a) Ecuacin diferencial del sistema, que relaciona el caudal de entrada Q con el nivel dee lquido en el depsito, H (salida).
b) Supuesto que el flotador provoca la apertura de la electrovlvula de entrada cuando H=H1(altura mnima) entrando un caudal constante Q , y la cierra cuando H=H (altura mxima),2calcular las expresiones de las curvas de llenado y vaciado.
NOTA: Tomar el origen de tiempos en t .o
FIG. 7.1
-
Acciones bsicas de control 99
CONTROL P-I-D. CARACTERISTICAS DE LA RESPUESTA A SEALES DE CONSIGNA Y A PERTURBACIONES
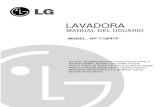
7.2) Considrese el sistema de control de nivel de lquido de la Figura 7.2 , en el que se haintroducido un regulador analgico que accionar una electrovlvula de apertura variable, demanera que introduce un caudal de entrada variable. Supondremos que todas las variablesincrementales r , q , h y q se miden a partir de sus valores en estado estacionario R , Q ,e s o o H y Q , respectivamente, y que son suficientemente pequeas para que el sistema se aproximeo omediante un modelo matemtico lineal.El tanque tiene una seccin A y se supone que, para pequeas desviaciones del rgimenestacionario, q = k h , como corresponde a un modelo linealizado. s h
Si el regulador es de tipo proporcional ( P ) con constante K :p
a) Obtener la funcin de transferencia del depsito H(s) / Q (s)eb) Calcular, a partir de la funcin de transferencia en lazo cerrado, la evolucin del incrementodel nivel de lquido h(t) para un pequeo cambio de la entrada de referencia en escaln c) Calcular la expresin temporal del error y valor del error en rgimen permanente para unaentrada en escaln
FIG. 7.2
-
100 Problemas de ingeniera de control
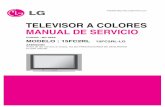
7.3) Considrese el sistema de control de nivel de lquido de la Figura 7.3 , en el que se haintroducido un regulador analgico que accionar una electrovlvula de apertura variable, demanera que introduce un caudal de entrada variable. Supondremos que todas las variablesincrementales r , q , h y q se miden a partir de sus valores en estado estacionario R , Q ,e s o o H y Q , respectivamente, y que son suficientemente pequeas para que el sistema se aproximeo omediante un modelo matemtico lineal.El tanque tiene una seccin A y se supone que, para pequeas desviaciones del rgimenestacionario, q = k h , como corresponde a un modelo linealizado.s h
Si el regulador es de tipo integral ( I ) con constante K , calcular:i
a) Funcin de transferencia en lazo cerrado, calculando los parmetros T y > en funcin delnvalor de K .i b) Tipos de respuesta en el incremento del nivel de lquido h(t) para una entrada de referenciaen escaln en funcin de K .i c) Expresin del error E(s) y valor del error en rgimen permanente para una entrada enescaln.
FIG. 7.3