
Controlador de motor CMMP… - Festo USA · 2020-03-07 · Descripción de los datos técnicos y de...
132
Controlador de motor CMMP… Manual Montaje e instalación Tipo CMMP-AS- C20-11A Manual 572 596 es 1010NH [753 356]
Transcript of Controlador de motor CMMP… - Festo USA · 2020-03-07 · Descripción de los datos técnicos y de...

Recortar: Arriba: 61,5 mm Abajo: 61,5 mm Izquierda: 43,5 mm Derecha: 43,5 mm
Controlador de motor CMMP…
Manual Montaje e instalación Tipo CMMP-AS- C20-11A
Manual 572 596 es 1010NH [753 356]


Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 3
Edición __________________________________________________ es 1010NH
Denominación ______________________________ P.BE-CMMP-AS-C20-11A-ES
Nº de artículo ________________________________________________ 572 596
(Festo AG & Co KG., D-73726 Esslingen, 2010)
Internet: http://www.festo.com
E-Mail:[email protected]
Sin nuestra expresa autorización, queda terminantemente prohibida la reproducción total o parcial de este documento, así como su uso indebido y/o su exhibición o comunicación a terceros. El incumplimiento de lo anterior obliga al pago de indemnización por daños y perjuicios. Quedan reservados todos los derechos inherentes, en especial los de patentes, de modelos registrados y estéticos.

4 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Directorio de revisiones
Autor:
Nombre del manual: Manual de producto de Festo P.BE-CMMP-AS-C20-11A-DE
Nombre del archivo:
Lugar de almacenamiento del archivo:
Nº Descripción Índice de revisiones Fecha de modificación
1 Fabricación 1010NH 23.09.10
Marca registrada
CANopen®, CiA® y PROFIBUS® son las marcas registradas de los propietarios
correspondientes en determinados países.

ÍNDICE
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 5
ÍNDICE
1. Información general .............................................................................................. 11
1.1 Documentación ................................................................................................... 11
1.2 Dotación del suministro ...................................................................................... 11
2. Medidas de seguridad para accionamientos y controles eléctricos ..................... 13
2.1 Símbolos utilizados ............................................................................................. 13
2.2 Indicaciones generales ........................................................................................ 14
2.3 Peligros por un uso incorrecto ............................................................................. 15
2.4 Medidas de seguridad ......................................................................................... 16
2.4.1 Medidas generales de seguridad ......................................................... 16
2.4.2 Medidas de seguridad para el montaje y el mantenimiento ................. 18
2.4.3 Protección contra el contacto con piezas eléctricas ............................. 20
2.4.4 Protección mediante tensión baja de protección (PELV) contra descarga eléctrica ..................................................................... 22
2.4.5 Protección ante movimientos peligrosos ............................................. 22
2.4.6 Protección contra el contacto con piezas calientes .............................. 23
2.4.7 Protección durante la manipulación y el montaje ................................ 23
3. Descripción del producto ...................................................................................... 25
3.1 Generalidades ..................................................................................................... 25
3.1.1 Secuencia de conexión ........................................................................ 28
3.2 Alimentación de corriente.................................................................................... 29
3.2.1 Alimentación de AC trifásica ................................................................ 29
3.2.2 Acoplamiento del circuito intermedio, alimentación de DC .................. 29
3.2.3 Fusible para la red ............................................................................... 29
3.3 Chopper de frenado ............................................................................................. 30
3.4 Interfaces de comunicación ................................................................................. 30
3.4.1 Perfil de Festo para manipulación y posicionamiento (FHPP) .............. 31
3.4.2 Interface RS232 ................................................................................... 32
3.4.3 Interface RS485 ................................................................................... 34
3.4.4 Bus CAN ............................................................................................... 34
3.4.5 PROFIBUS ............................................................................................ 35
3.4.6 Funciones de I/O y mando del equipo ................................................. 35
4. Cuadro general de funciones ................................................................................ 37
4.1 Motores ............................................................................................................... 37
4.1.1 Servomotores sincrónicos ................................................................... 37
4.1.2 Motores lineales .................................................................................. 37

ÍNDICE
6 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
4.2 Funciones del servocontrolador de posición CMMP-AS ....................................... 37
4.2.1 Funciones ............................................................................................ 37
4.2.2 Modulación de la duración de impulsos (PWM) ................................... 38
4.2.3 Gestión del valor nominal .................................................................... 39
4.2.4 Funcionamiento regulado por el momento de giro .............................. 39
4.2.5 Funcionamiento regulado por la velocidad .......................................... 40
4.2.6 Regulación del número de revoluciones limitada por el par de giro ..... 41
4.2.7 Sincronización con fuentes de pulsos externas ................................... 41
4.2.8 Compensación del momento de la carga en ejes verticales ................. 41
4.2.9 Posicionamiento y regulación de la posición ....................................... 41
4.2.10 Sincronización, engranaje eléctrico ..................................................... 42
4.2.11 Gestión del frenado ............................................................................. 43
4.3 Control de posicionamiento ................................................................................ 43
4.3.1 Resumen .............................................................................................. 43
4.3.2 Posicionamiento relativo ..................................................................... 44
4.3.3 Posicionamiento absoluto ................................................................... 44
4.3.4 Generador de perfiles de movimiento .................................................. 45
4.3.5 Recorrido de referencia ........................................................................ 45
4.3.6 Secuencias de posicionamiento ........................................................... 46
4.3.7 Entrada de parada opcional ................................................................. 47
4.3.8 Control de trayectoria con interpolación lineal (en preparación) ......... 48
4.3.9 Posicionamiento con varios ejes con sincronización del tiempo .......... 48
5. Técnica funcional de seguridad ............................................................................ 49
5.1 Uso previsto general ........................................................................................... 49
5.2 Función integrada "STO" .................................................................................... 52
5.2.1 Generalidades / Descripción "STO Safe Torque off" ........................... 52
5.2.2 Diagrama de temporización de STO ..................................................... 53
5.2.3 Rearranque después de la activación de "Parada segura" .................. 54
5.2.4 Ejemplo de conexión de circuito CMMP-AS STO................................... 55
5.2.5 Explicaciones del ejemplo de circuito .................................................. 56
5.2.6 Requerimiento de PARADA DE EMERGENCIA, control de puertas de protección ......................................................... 56
5.2.7 Comprobación de la función de seguridad ........................................... 57
5.2.8 Activación segura del freno de retención ............................................. 59
5.3 SS1, Safe Stop 1 .................................................................................................. 59
5.3.1 Explicación ........................................................................................... 59
5.3.2 Diagrama de temporización SS1 .......................................................... 60
5.3.3 Descripción del diagrama de temporización ........................................ 61
5.3.4 Activación de "Safe Stop 1" ................................................................ 62
5.3.5 Ajuste del retardo de desconexión ....................................................... 62
5.3.6 Ejemplo de parametrización FCT .......................................................... 63
5.3.7 Ejemplo de conexión de circuito CMMP-AS SS1 ................................... 64

ÍNDICE
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 7
5.3.8 Explicaciones del ejemplo de circuito .................................................. 65
5.3.9 Requerimiento de PARADA DE EMERGENCIA, control de puertas de protección ......................................................... 65
5.3.10 Restablecimiento del funcionamiento normal ...................................... 66
5.3.11 Comprobación de la función de seguridad ........................................... 66
5.3.12 Determinación del tiempo de frenado .................................................. 67
5.3.13 Ajuste del tiempo de retardo ............................................................... 68
6. Instalación mecánica ............................................................................................ 69
6.1 Notas importantes ............................................................................................... 69
6.2 Vista del aparato ................................................................................................. 71
6.2.1 Montaje ............................................................................................... 74
7. Instalación eléctrica.............................................................................................. 75
7.1 Asignación de conectores enchufables ................................................................ 75
7.2 Sistema completo del CMMP-AS ......................................................................... 76
7.3 Conexión: Fuente de alimentación [X9] ................................................................ 78
7.3.1 Ejecución en el aparato [X9] ................................................................. 78
7.3.2 Contraclavija [X9] ................................................................................. 78
7.3.3 Asignación de clavijas [X9] ................................................................... 78
7.4 Conexión: Motor [X6] y [X6A] ............................................................................... 79
7.4.1 Ejecución en el servocontrolador de posición [X6] ............................... 79
7.4.2 Ejecución en el servocontrolador de posición [X6A] ............................. 79
7.4.3 Contraclavija [X6] ................................................................................. 79
7.4.4 Contraclavija [X6A] ............................................................................... 79
7.4.5 Asignación de clavijas [X6] ................................................................... 79
7.4.6 Asignación de clavijas [X6A] ................................................................. 80
7.4.7 Indicaciones de conexión ..................................................................... 80
7.5 Conexión: Comunicación de I/O [X1] ................................................................... 82
7.5.1 Ejecución en el aparato [X1] ................................................................. 82
7.5.2 Contraclavija [X1] ................................................................................. 82
7.5.3 Asignación de clavijas [X1] ................................................................... 83
7.5.4 Tipo y ejecución del cable [X1] ............................................................. 84
7.5.5 Indicaciones de conexión [X1] .............................................................. 84
7.6 Conexión: STO y SS1 ........................................................................................... 87
7.6.1 Ejecución en el aparato [X3] ................................................................. 87
7.6.2 Contraclavija [X3] ................................................................................. 87
7.6.3 Asignación de clavijas [X3] ................................................................... 87
7.7 Conexión: Resolver [X2A] ..................................................................................... 88
7.7.1 Ejecución en el aparato [X2A] ............................................................... 88
7.7.2 Contraclavija [X2A] ............................................................................... 88
7.7.3 Asignación de clavijas [X2A] ................................................................. 88

ÍNDICE
8 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.8 Conexión: Encoder [X2B] ..................................................................................... 89
7.8.1 Ejecución en el aparato [X2B] ............................................................... 89
7.8.2 Contraclavija [X2B] ............................................................................... 89
7.8.3 Asignación de clavijas del transmisor analógico [X2B] ......................... 89
7.8.4 Asignación de clavijas encoder con interface serie (p. ej. EnDat, HIPERFACE) [X2B] ............................................................ 90
7.8.5 Asignación de clavijas del transmisor digital [X2B] .............................. 91
7.9 Conexión: entrada de transmisor incremental [X10] ............................................ 92
7.9.1 Ejecución en el aparato [X10] ............................................................... 92
7.9.2 Contraclavija [X10] ............................................................................... 92
7.9.3 Asignación de clavijas [X10] ................................................................. 92
7.9.4 Tipo y ejecución del cable [X10] ........................................................... 92
7.9.5 Indicaciones de conexión [X10] ............................................................ 93
7.10 Conexión: salida de transmisor incremental [X11] ............................................... 93
7.10.1 Ejecución en el aparato [X11] ............................................................... 93
7.10.2 Contraclavija [X11] ............................................................................... 93
7.10.3 Asignación de clavijas [X11] ................................................................. 93
7.11 Conexión: Bus CAN [X4] ....................................................................................... 94
7.11.1 Ejecución en el aparato [X4] ................................................................. 94
7.11.2 Contraclavija [X4] ................................................................................. 94
7.11.3 Asignación de clavijas [X4] ................................................................... 94
7.11.4 Indicaciones de conexión [X4] .............................................................. 94
7.12 Conexión: RS232/COM [X5] ................................................................................. 96
7.12.1 Ejecución en el aparato [X5] ................................................................. 96
7.12.2 Contraclavija [X5] ................................................................................. 96
7.12.3 Asignación de clavijas [X5] ................................................................... 96
7.13 Instrucciones para una instalación segura y conforme a la EMC .......................... 97
7.13.1 Explicaciones y conceptos ................................................................... 97
7.13.2 Indicaciones de conexión ..................................................................... 97
7.13.3 Generalidades acerca de la EMC .......................................................... 98
7.13.4 Áreas EMC: primer y segundo entornos ............................................... 99
7.13.5 Cableado conforme a EMC ................................................................. 100
7.13.6 Funcionamiento con cables de motor largos ...................................... 101
7.13.7 Protección EDS .................................................................................. 101
8. Puesta en funcionamiento .................................................................................. 102
8.1 Instrucciones generales de conexión ................................................................. 102
8.2 Herramienta / material ...................................................................................... 102
8.3 Conectar el motor .............................................................................................. 102
8.4 Conexión del servocontrolador de posición CMMP-AS a la alimentación de corriente ........................................................................... 104

ÍNDICE
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 9
8.5 Conexión del PC ................................................................................................. 104
8.6 Comprobación de disponibilidad para funcionar ............................................... 105
9. Funciones de servicio y mensajes de fallo .......................................................... 106
9.1 Funciones de protección y de servicio ............................................................... 106
9.1.1 Resumen ............................................................................................ 106
9.1.2 Detección de fallo de fase y de red .................................................... 106
9.1.3 Control de sobrecorriente y cortocircuitos ......................................... 106
9.1.4 Control de sobretensión del circuito intermedio ................................ 107
9.1.5 Control de la temperatura para el disipador de calor ......................... 107
9.1.6 Control del motor ............................................................................... 107
9.1.7 Control I²t .......................................................................................... 107
9.1.8 Control de potencia para el interruptor chopper de frenado .............. 107
9.1.9 Estado de puesta a punto .................................................................. 108
9.1.10 Descarga rápida del circuito intermedio ............................................ 108
9.2 Mensajes de modo de funcionamiento y de fallo............................................... 109
9.2.1 Indicación de modo de funcionamiento y de fallo .............................. 109
9.2.2 Mensajes de error .............................................................................. 110
A. Especificaciones técnicas ................................................................................... 120
A.1 Elementos de mando e indicación ..................................................................... 121
A.2 Unidad de alimentación [X9] .............................................................................. 121
A.3 Safe Torque Off y Supply 24 V [X3] .................................................................... 122
A.4 Conexión del motor [X6] .................................................................................... 122
A.5 Conexión de transductor angular [X2A] y [X2B] .................................................. 123
A.5.1 Conexión del Resolver [X2A] .............................................................. 123
A.5.2 Conexión del encoder [X2B] ............................................................... 124
A.6 Interfaces de comunicación ............................................................................... 125
A.6.1 RS232 [X5] ......................................................................................... 125
A.6.2 Bus CAN [X4] ...................................................................................... 125
A.6.3 Interface I/O [X1] ................................................................................ 126
A.6.4 Entrada de transmisor incremental [X10] ........................................... 127
A.6.5 Salida de transmisor incremental [X11] ............................................. 127
B. Glosario ............................................................................................................... 129
C. Índice .................................................................................................................. 131


1. Información general
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 11
1. Información general
1.1 Documentación
Este manual de producto sirve para el trabajo seguro con los servocontroladores de posición de la serie CMMP-AS-C20-11A para servocontroladores de posición trifásicos. Contiene las indicaciones de seguridad que deben observarse.
Para más información, consulte los siguientes manuales de la gama de productos CMMP-AS:
- Manual de CANopen: P.BE-CMMP-CO-SW "Servocontrolador de posición CMMP-AS": Descripción del protocolo CANopen implementado conforme a norma DSP402.
- Manual de PROFIBUS: P-BE-CMMP-FHPP-PB-SW "Servocontrolador de posición CMMP-AS": Descripción del protocolo PROFIBUS-DP implementado.
- Manual de SERCOS: P-BE-CMMP-SC-SW "Servocontrolador de posición CMMP-AS": Descripción de la funcionalidad SERCOS implementada.
- Manual de Ethernet: P-BE-CMMP-ET-SW "Módulo de tecnología de Ethernet" : Descripción de los datos técnicos y de la funcionalidad del aparato cuando se usa el módulo de tecnología de Ethernet.
- Manual de DeviceNet: P.BE-CMMP-FHPP-DN-SW Descripción del protocolo DeviceNet
implementado.
- Manual de FHPP: P.BE-CMM-FHPP-SW Descripción del perfil de datos FHPP implementado.
Todas las funciones de software de la nueva serie de aparatos CMMP-AS son aplicadas en el marco de un proceso de desarrollo gradual.
1.2 Dotación del suministro
El suministro comprende:
Número Suministro
1 Servocontrolador de posición CMMP-AS
1 Conector para conexión del motor y potencia enchufado
Tabla 1.1 Dotación del suministro
Las contraclavijas para las tomas de mando o para las conexiones de codificadores rotatorios no están incluidas en el suministro. Éstas pueden pedirse como accesorios:
www.festo.com/katalog


2. Medidas de seguridad para accionamientos y controles eléctricos
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 13
2. Medidas de seguridad para accionamientos y controles eléctricos
2.1 Símbolos utilizados
Información
Importante
Información e indicaciones importantes.
Precaución
La inobservancia puede tener como consecuencia daños materiales graves.
Advertencia
La inobservancia puede ocasionar daños personales y materiales graves.
Advertencia
¡PELIGRO!
La inobservancia puede tener como consecuencia daños materiales y lesiones físicas graves.
Advertencia
¡Tensión peligrosa que puede causar la muerte!
Esta advertencia de seguridad indica que puede aparecer una tensión peligrosa que puede causar la muerte.
Accesorios
Medio ambiente

2. Medidas de seguridad para accionamientos y controles eléctricos
14 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
2.2 Indicaciones generales
La empresa Festo AG & Co.KG no asume ninguna responsabilidad por daños ocasionados por la inobservancia de las indicaciones de advertencia del presente manual de
instrucciones.
Importante
Antes de la puesta en marcha deben leerse las Medidas de seguridad para accionamientos y controles eléctricos a partir de la página 13, así como el capítulo 7.13 Instrucciones para una instalación segura y conforme a la EMC, página 97.
Si la documentación en el idioma presentado no se entiende a la perfección, diríjase al proveedor y notifíqueselo.
El funcionamiento perfecto y seguro del servocontrolador de posicionamiento presupone un transporte, almacenamiento, montaje y planificación del proyecto adecuados y profesionales, teniendo en cuenta los riesgos y las medidas de protección y de emergencia, así como también la instalación, y un manejo y mantenimientos cuidadosos.
Importante
El manejo de las instalaciones eléctricas debe ser llevado a cabo únicamente por personal debidamente formado y cualificado:
Personal formado y cualificado
En este manual de instrucciones y en las indicaciones de advertencia en el propio producto, se denomina personal formado y cualificado al personal que dispone de los conocimientos necesarios para la planificación del proyecto, la instalación, el montaje, la puesta a punto y el funcionamiento del producto, conoce todas las advertencias y medidas de seguridad del presente manual de funcionamiento y posee las cualificaciones correspondientes a la actividad que desarrolla:
Formación e instrucción o autorización para conectar y desconectar equipos/sistemas según los estándares de la técnica de seguridad y para poner a tierra y marcar según las prescripciones de trabajo.
Formación o instrucción según el estándar de la tecnología de seguridad en mantenimiento y uso de equipo de seguridad adecuado.
Entrenamiento en primeros auxilios.
Las siguientes indicaciones deben leerse antes de la primera puesta en marcha de la
instalación para evitar daños personales y/o materiales:
Estas medidas de seguridad deben observarse en todo momento.

2. Medidas de seguridad para accionamientos y controles eléctricos
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 15
No intente instalar ni poner en marcha el servocontrolador de posición sin antes haber leído con atención todas las instrucciones de seguridad relativas a los mandos y accionamientos eléctricos que se incluyen en el presente
documento. Antes de iniciar cualquier actividad o trabajo con el servocontrolador de posición es indispensable volver a leer estas instrucciones de seguridad e instrucciones para el usuario.
En caso de que no tenga a su disposición ningún tipo de instrucciones de uso para el servocontrolador de posición, póngase en contacto con su distribuidor local autorizado.
Solicite el envío inmediato de dicha documentación a las personas responsables para poder garantizar el uso, bajo condiciones de seguridad, del servocontrolador de posición.
En caso de venta, alquiler o transmisión del servocontrolador
de posición se deberán entregar con éste las presentes medidas de seguridad.
Por razones de seguridad y garantía no le está permitido al operador abrir el servocontrolador de posición.
Para garantizar un funcionamiento del servocontrolador de posición sin dificultades es indispensable contar con una planificación realizada por una persona experta.
Advertencia
¡PELIGRO!
El manejo indebido del servocontrolador de posición, así como la no observancia de las advertencias especificadas en este documento y la manipulación indebida de los dispositivos de seguridad pueden provocar daños materiales, lesiones, descargas eléctricas e incluso, en casos extremos, la muerte.
2.3 Peligros por un uso incorrecto
Advertencia
¡PELIGRO!
¡Alto voltaje y alta corriente de trabajo!
¡Peligro de muerte o lesiones graves a causa de descargas eléctricas!

2. Medidas de seguridad para accionamientos y controles eléctricos
16 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Advertencia
¡PELIGRO!
¡Alta tensión eléctrica a causa de una conexión incorrecta!
¡Peligro de muerte o lesiones a causa de descargas eléctricas!
Advertencia
¡PELIGRO!
¡Las superficies de los cuerpos de los dispositivos pueden estar calientes!
¡Peligro de lesiones! ¡Peligro de quemaduras!
Advertencia
¡PELIGRO!
¡Movimientos peligrosos!
¡Peligro de muerte, lesiones graves o daños materiales a causa de movimientos no intencionados de los motores!
2.4 Medidas de seguridad
2.4.1 Medidas generales de seguridad
Importante
El servocontrolador de posición cumple la clase de protección IP20 así como el grado de ensuciamiento 2.
Debe asegurarse que el entorno corresponda al grado de protección y al grado de ensuciamiento mencionados.
Importante
Utilizar únicamente accesorios y piezas de repuesto autorizados por el fabricante.
Importante
Los servocontroladores de posición deben conectarse a la red según las regulaciones y normativas locales vigentes así como los reglamentos y directivas de los organismos profesionales y aseguradoras correspondientes, las prescripciones electrotécnicas y la normativa nacional vigente, de modo que puedan desconectarse de la red con medios de desconexión adecuados (p. ej. interruptor general, disyuntor, protección, etc.).

2. Medidas de seguridad para accionamientos y controles eléctricos
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 17
El servocontrolador de posición se puede proteger por fusible de 300 mA mediante un interruptor de protección FI (RCD = Residual Current protective Device).
Importante
Para conectar los contactos de control deberían utilizarse contactos dorados o contactos con elevada presión de contacto.
Como prevención deben tomarse medidas de eliminación de averías, como p. ej. la conexión de contactores y relés con elementos RC o diodos.
Deben observarse las normas y regulaciones de seguridad vigentes en el país en que se va a utilizar el dispositivo.
Advertencia
Deben asegurarse las condiciones ambientales indicadas en la
documentación del producto. No están permitidas las aplicaciones que puedan poner en peligro la seguridad, excepto cuando el fabricante lo especifique por escrito.
Puede consultar las indicaciones para la realización de una instalación conforme a las normas de EMC en el capítulo 7.13 (página 97).
El cumplimiento de los valores límite establecidos por las normas nacionales es responsabilidad del fabricante de la instalación o de la máquina.
Advertencia
Las especificaciones técnicas y las condiciones de conexión e instalación del servocontrolador de posición están recogidos en este manual de producto y su cumplimiento es obligatorio.
Importante
Deben observarse todas las normativas especificadas, así como los reglamentos de los organismos profesionales correspondientes, las prescripciones electrotécnicas y la normativa nacional vigente.

2. Medidas de seguridad para accionamientos y controles eléctricos
18 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Son aplicables, entre otras, las siguientes normas, que se citan meramente de modo enunciativo:
VDE 0100 Normativa para el montaje de instalaciones de
alta tensión de hasta 1.000 voltios
EN 60204-1 Equipo eléctrico de las máquinas
EN 50178 Equipo electrónico para uso en instalaciones de potencia
EN ISO 12100 Seguridad de las máquinas – Conceptos básicos,
principios generales para el diseño
EN 1050 Seguridad de las máquinas – Principios para la evaluación del riesgo
EN 1037 Seguridad de las máquinas – Prevención de una
puesta en marcha intempestiva
EN ISO 13849-1 o
EN 61508
Partes de los sistemas de mando relativas a la seguridad
2.4.2 Medidas de seguridad para el montaje y el mantenimiento
Para el montaje y mantenimiento del equipo serán de aplicación, en todos los casos, las correspondientes normas DIN, VDE, EN e IEC, además de todas las normas de seguridad y prevención de accidentes nacionales y locales aplicables. El constructor de la instalación o el explotador de la misma debe asegurar el cumplimiento de dichas normas y regulaciones.
Advertencia
El manejo, mantenimiento y/o reparación del servocontrolador de posición sólo podrá realizarlo personal cualificado y formado para trabajar con aparatos eléctricos.
Prevención de accidentes, lesiones y/o daños materiales:
Advertencia
Asegurar adicionalmente los ejes verticales para evitar que se caigan o desprendan una vez desconectado el motor, ya sea mediante: - un bloqueo mecánico de los ejes verticales, - un dispositivo externo de frenado/retención/sujeción, o - un contrapeso suficiente de los ejes.

2. Medidas de seguridad para accionamientos y controles eléctricos
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 19
Advertencia
Ni el freno de sostenimiento del motor suministrado de serie, ni el freno de sostenimiento del motor controlado por el sistema de regulación del accionamiento por sí solos son apropiados para la protección del personal.
Advertencia
¡PELIGRO!
Dejar sin tensión al equipo eléctrico mediante el interruptor principal y asegurarlo para que no se encienda de nuevo y esperar hasta que el circuito intermedio esté descargado para realizar: - los trabajos de mantenimiento y puesta a punto - los trabajos de limpieza - interrupciones prolongadas del funcionamiento.
Advertencia
¡PELIGRO!
Antes de proceder con los trabajos de mantenimiento, hay que asegurarse de que la alimentación eléctrica está desconectada y bloqueada, y que el circuito intermedio está descargado.
Advertencia
La resistencia de frenado externa o interna conduce tensión de circuito intermedio durante el funcionamiento, y después de desconectar el servocontrolador de posición aún puede conducir tensión durante unos 5 minutos; dicha tensión puede causar la muerte o lesiones graves al entrar en contacto con ella.
Advertencia
El montaje debe realizarse cuidadosamente. Hay que asegurarse de que ni durante el montaje ni durante el posterior funcionamiento del accionamiento caen virutas de taladrado, polvo metálico o piezas de montaje (tornillos, tuercas, segmentos de conductos) en el servocontrolador de posición.
Asimismo debe asegurarse que la fuente de alimentación externa del regulador (24 V) esté desconectada.
El circuito intermedio o la tensión de red siempre se deben desconectar antes que la alimentación de 24 V del controlador.

2. Medidas de seguridad para accionamientos y controles eléctricos
20 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Advertencia
Sólo se deben realizar trabajos en la zona de la máquina cuando la alimentación de corriente alterna y/o continua esté
desconectada y bloqueada. Las unidades de salida desconectadas o la habilitación de regulador desconectada no son bloqueos apropiados. En caso de error puede originarse un comportamiento no intencionado del accionamiento.
Advertencia
La puesta a punto debe realizarse con motores sin carga para evitar daños mecánicos, p. ej. a causa de un sentido de giro incorrecto.
Advertencia
Los aparatos electrónicos en general no ofrecen seguridad total.
El usuario es el responsable de poner la instalación en un estado seguro en caso de fallo del aparato eléctrico.
Advertencia
¡PELIGRO!
El servocontrolador de posición y en particular la resistencia de frenado (externa o interna) pueden alcanzar temperaturas elevadas y ocasionar quemaduras graves al tocarlos.
2.4.3 Protección contra el contacto con piezas eléctricas
Esta sección se refiere sólo a aparatos y componentes de accionamiento con tensiones superiores a 50 voltios. Si se tocan piezas con una tensión superior a 50 voltios, éstas pueden ser peligrosas para las personas y ocasionar descargas eléctricas. Durante el funcionamiento de aparatos eléctricos es inevitable que ciertas piezas estén bajo tensión peligrosa.
Advertencia
¡Tensión peligrosa que puede causar la muerte!
¡Alta tensión eléctrica!
¡Peligro de muerte, de lesión o de lesiones graves a causa de descargas eléctricas!
Importante
Deben observarse todas las normativas especificadas, así como los reglamentos de los organismos profesionales correspondientes, las prescripciones electrotécnicas y la normativa nacional vigente.

2. Medidas de seguridad para accionamientos y controles eléctricos
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 21
Advertencia
Antes de la conexión deben colocarse en los aparatos las cubiertas y dispositivos de protección previstas para evitar el
contacto. En dispositivos de montaje empotrado debe asegurarse la protección contra el contacto directo con piezas eléctricas mediante una caja exterior, como p. ej. un armario de maniobra.
Advertencia
Conectar siempre firmemente el conductor de protección a tierra del equipo eléctrico y de los aparatos a la red de alimentación.
¡A causa del filtro de red integrado la corriente de escape es superior a 3,5 mA!
Advertencia
Antes de la puesta punto, incluso para breves mediciones y ensayos, debe conectarse el conductor de protección a todos los dispositivos eléctricos según el diagrama de conexiones o bien conectar un conductor de tierra.
En caso contrario pueden originarse tensiones elevadas que causan descargas eléctricas.
Advertencia
Los puntos de conexión eléctrica de los componentes no deben tocarse cuando estén conectados.
Advertencia
Antes de acceder a piezas eléctricas con tensiones superiores a 50 voltios debe desconectarse el aparato de la red o de la fuente de alimentación.
Asegurar contra reconexiones.
Advertencia
Para la instalación y en lo que respecta al aislamiento y a las medidas de protección, se deberá prestar especial atención al
nivel de tensión del circuito intermedio. Debe asegurarse que la conexión a tierra, el dimensionado de cables y la protección ante cortocircuito correspondiente se realicen adecuadamente.

2. Medidas de seguridad para accionamientos y controles eléctricos
22 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Advertencia
El aparato dispone de una conexión de descarga rápida del circuito intermedio conforme a la norma EN 60204-1. No obstante, ante determinadas configuraciones de los aparatos, sobre todo en caso de una conexión en paralelo de varios servocontroladores de posición en el circuito intermedio o si no hay una resistencia de frenado conectada, la descarga rápida puede resultar ineficaz. Por ello, en los servocontroladores de posición puede persistir una tensión peligrosa hasta 5 minutos después de su desconexión (carga residual del condensador).
2.4.4 Protección mediante tensión baja de protección (PELV) contra descarga eléctrica
Todas las conexiones y terminales con tensiones de 5 a 50 voltios del servocontrolador de posición son tensiones bajas de protección, que se deberán realizar a prueba de contactos de conformidad con las siguientes normas.
Normas - Internacional: IEC 60364-4-41
- Europea: EN 50178 y EN60204-1
Advertencia
¡PELIGRO!
¡Alta tensión eléctrica a causa de una conexión incorrecta!
¡Peligro de muerte o lesiones a causa de descargas eléctricas!
En todas las conexiones y bornes con tensiones de 0 a 50 voltios sólo pueden conectarse aparatos, componentes eléctricos y cables que presenten una tensión baja de protección (PELV = Protective Extra Low Voltage).
Conectar únicamente tensiones y circuitos que tengan un aislamiento seguro de las tensiones peligrosas. El aislamiento seguro se consigue, por ejemplo, con transformadores de separación, optoacopladores seguros o el funcionamiento con baterías sin red.
2.4.5 Protección ante movimientos peligrosos
El accionamiento incorrecto de los motores conectados puede causar movimientos peligrosos. Las causas de dichos movimientos pueden ser:
Causas - alambrado o cableado incorrecto o defectuoso
- errores en el manejo de los componentes
- errores en los emisores de valores medidos y de señales
- componentes defectuosos o no conformes a las normas de EMC
- errores en el software en el sistema de control de nivel superior.
Estos errores pueden aparecer inmediatamente después de la conexión o tras un tiempo indeterminado de funcionamiento.

2. Medidas de seguridad para accionamientos y controles eléctricos
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 23
Los controles llevados a cabo en los componentes de accionamiento evitan errores de funcionamiento en los accionamientos acoplados. Sin embargo, no puede confiarse únicamente en esto en cuanto a la protección de personas, especialmente al peligro de lesiones y/o daños materiales. Hasta que los controles integrados tengan efecto no se
puede descartar un movimiento de accionamiento erróneo, cuya magnitud depende del tipo de control y del modo de funcionamiento.
Advertencia
¡PELIGRO!
¡Movimientos peligrosos!
¡Peligro de muerte, peligro de lesiones o daños materiales!
Por los motivos mencionados debe garantizarse la protección de personas mediante controles o medidas de un nivel superior de la instalación. Según las características específicas de la instalación el constructor de la instalación debe realizar un análisis de riesgos y errores. Las normas de seguridad aplicables para la instalación se consideran
incluidas. A causa de desconexión, derivación o activación insuficiente de los dispositivos de seguridad pueden ocasionarse movimientos arbitrarios de la máquina u otros fallos de funcionamiento.
2.4.6 Protección contra el contacto con piezas calientes
Advertencia
¡PELIGRO!
¡Las superficies de los cuerpos de los dispositivos pueden estar calientes!
¡Peligro de lesiones! ¡Peligro de quemaduras!
Advertencia
¡Peligro de quemaduras!
¡No tocar las superficies que se encuentren cerca de fuentes de calor!
Después de desconectar los equipos dejar que se enfríen durante 10 minutos antes de acceder a ellos.
¡Si se tocan piezas calientes del equipamiento, tales como los cuerpos de los equipos en los que se encuentran los disipadores de calor y las resistencias, pueden causarse quemaduras!
2.4.7 Protección durante la manipulación y el montaje
En circunstancias desfavorables, la manipulación y el montaje incorrectos de ciertas piezas y componentes pueden causar lesiones.

2. Medidas de seguridad para accionamientos y controles eléctricos
24 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Advertencia
¡PELIGRO!
¡Riesgo de lesiones a causa de manipulación inadecuada!
¡Riesgo de lesiones por contusiones, cortes y golpes!
Son aplicables las medidas de seguridad generales:
Advertencia
Observar las normas generales de establecimiento y seguridad para la manipulación y el montaje.
Utilizar dispositivos adecuados de montaje y de transporte. Tomar las precauciones necesarias para prevenir
inmovilizaciones y aplastamientos. Utilizar únicamente herramientas apropiadas. Utilizar
herramientas especiales siempre que se haya prescrito. Utilizar los dispositivos de elevación y las herramientas
correctamente. Siempre que sea necesario, utilizar los equipamientos de
protección apropiados (por ejemplo, gafas protectoras, calzado de seguridad y guantes protectores).
No detenerse debajo de cargas en suspensión.
Limpiar inmediatamente cualquier líquido derramado en el suelo para evitar el riesgo de resbalar.

3. Descripción del producto
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 25
3. Descripción del producto
3.1 Generalidades
Los servocontroladores de posición de la serie CMMP-AS son servoconvertidores inteligentes de AC con numerosas posibilidades de parametrización y opciones de ampliación. Estos permiten adaptar de forma flexible toda una serie de diferentes opciones de aplicación.
La gama de servocontroladores de posición incluye tipos con alimentación monofásica y trifásica.
Código del producto:
Ejemplo:
CMMP-AS-C20-11A-P3
Servocontrolador de la serie Premium para motores sincrónicos de AC trifásicos, con 20 A de intensidad nominal y 3 x 230...480 V de tensión de entrada
CMM
— P
— AS
— C20
— 11A _ P3
Serie
CMM Controlador del motor
Ejecución
P Premium
Tecnología de motor
AS Sincrónico AC
Corriente nominal del motor
C20 20 A
Tensión de entrada
11A 3 x 230…480 V AC
Fases
P3 Trifásica
Los tipos con alimentación trifásica se han previsto para la conexión a una red de 3 x 400 V de AC.

3. Descripción del producto
26 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Todos los servocontroladores de posición de la gama CMMP-AS presentan las siguientes características:
- Compacta forma de libro, con posibilidad de conexión directa en serie.
- Gran calidad de la regulación gracias a sus extraordinarios sensores, muy superiores a los estándares convencionales del mercado, y gracias a los recursos informáticos.
- Total integración de todos los componentes del núcleo del controlador y de la unidad de potencia, incluyendo el interface RS232 para la comunicación del PC y el interface CANopen para la integración en sistemas de automatización.
- Evaluación integrada universal del codificador rotatorio para los siguientes transmisores:
- Resolver
- Transmisor incremental con/sin señales de conmutación
- Transmisor incremental Stegmann de gran resolución, transmisor absoluto con HIPERFACE
- Transmisor incremental Heidenhain de gran resolución, transmisor absoluto con EnDat
- Cumplimiento de las actuales normas de CE y EN sin necesidad de medidas externas adicionales.
- Cuerpo metálico cerrado en todos los lados, con optimización EMC, para fijar en placas de montaje en armario de maniobra convencionales. Los aparatos cuentan con el grado de protección IP20.
- Integración en el aparato de todos los filtros necesarios para satisfacer las directivas en materia de EMC (ámbito industrial) como p. ej., filtro de red, filtro de salida del motor, filtro para la alimentación de 24 V, así como las entradas y salidas.
- Resistencia de frenado integrada. Para grandes energías de frenado se pueden conectar resistencias externas.
- Aislamiento galvánico completo de la parte del controlador y de la etapa final de potencia según EN50178. Aislamiento galvánico del rango de potencial de 24 V con las
entradas y salidas digitales y la electrónica analógica y de regulación.
- Funcionamiento como regulador de par de giro, regulador del número de revoluciones o controlador de posición.
- Control de posicionamiento integrado con gran funcionalidad según "CAN in Automation" (CiA) DSP402 y numerosas funciones adicionales específicas de la
aplicación.
- Posicionamiento sin sacudidas o con optimización del tiempo de forma relativa o absoluta respecto a un punto de referencia.
- Posicionamiento punto a punto, con y sin sobrepaso.
- Marcha de sincronización de número de revoluciones y ángulo, con cambio de engranajes electrónico mediante entrada de transmisor incremental o bus de campo.

3. Descripción del producto
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 27
- Diversos modos de funcionamiento para la sincronización.
- Diversos métodos de recorrido de referencia.
- Operación por actuación secuencial.
- Modo Teach-in.
- Breves tiempos de ciclo, ancho de banda en circuito de regulación de corriente de aprox. 2 kHz y en circuito de regulación del número de revoluciones de aprox. 500 Hz.
- Frecuencia de ciclos conmutable para la etapa final.
- Soft PLC integrado para modificaciones y ampliaciones de funciones específicas del cliente.
- I/O libremente programables.
- Parametrización de fácil manejo con el programa de PC FCT de Festo.
- Primera puesta a punto guiada por menús.
- Identificación automática del motor.
- Fácil acoplamiento a una unidad de control de nivel superior, p. ej., a un PLC a través del plano de I/O o del bus de campo.
- Entrada analógica de 16 bits de gran resolución.
- Posiciones de enchufe tecnológicas para ampliaciones, como p. ej. el módulo de expansión de I/O o el interface PROFIBUS. También existe la posibilidad de utilizar 2 interfaces de bus de campo.

3. Descripción del producto
28 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
3.1.1 Secuencia de conexión
Power On
Initalisation phase
Controller enable (DIN5)
End stage is on
Holding brake is released
Speed setpoint value
Actual speed value
t1
t2
t3
t5
t7
DOUT0: READYt6
t4
a b
t1 3.500 ms Ciclo a través del programa de inicio y arranque de la aplicación
t2 > 500 µs (tcycP)
t3 30 ms Depende del modo de funcionamiento y del estado del accionamiento
t4a = N x 10 ms parametrizable (parámetros de frenado de retardo de inicio de marcha tF)
t4b > 100 ms Opcional en motores con transductores angulares sin señales de conmutación:
Tiempo para determinación de la posición de conmutación
t5 < 10 ms
t6 = K x 250 µs (tcycN) En función de la rampa de parada rápida
t7 = M x 10 ms Parametrizable (parámetros de frenado de retardo de desconexión tA)
Figura 3.1 Temporización de secuencia de conexión

3. Descripción del producto
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 29
3.2 Alimentación de corriente
3.2.1 Alimentación de AC trifásica
El servocontrolador de posición CMMP-AS cumple todos los requerimientos de un servocontrolador de posición.
- Gama de frecuencias nominal de 50 a 60 Hz 10 %
- Opción de carga eléctrica instantánea para la capacidad de combinación con servoconvertidores. El servocontrolador de posición CMMP-AS permite del cambio dinámico en ambos sentidos entre un funcionamiento mediante motores o mediante alternadores sin tiempos muertos.
- No se requiere ninguna parametrización por parte del usuario final
Comportamiento al conectar:
- En cuanto el servocontrolador de posición CMMP-AS es alimentado con la tensión de la red, se produce una carga del circuito intermedio (< 1 s) a través de las resistencias de frenado cuando está desactivado el relé del circuito intermedio.
- Tras realizarse con éxito la carga previa del circuito intermedio, el relé es excitado y el circuito intermedio sin resistencias se acopla la red de alimentación.
3.2.2 Acoplamiento del circuito intermedio, alimentación de DC
Acoplamiento del circuito intermedio:
- Resulta posible acoplar entre sí los servocontroladores de posición de la serie CMMP-AS con igual tensión nominal del circuito intermedio.
Alimentación de DC:
- Es posible una alimentación de DC sin conexión a la red a través de los bornes del circuito intermedio con tensiones
60 V de DC.
La supervisión digital de la temperatura del motor solo funciona a partir de una tensión del circuito intermedio de 230 V de DC. Por debajo de esta tensión el sensor digital de temperatura del motor es evaluado incorrectamente.
3.2.3 Fusible para la red
En el cable de la alimentación se tiene que colocar un fusible automático trifásico de 25 A con característica de acción lenta (B25).

3. Descripción del producto
30 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
3.3 Chopper de frenado
En el paso final de potencia hay integrado un chopper de frenado con resistencia de
frenado. Si durante la alimentación de retorno se excede la capacidad de carga permitida del circuito, la energía de frenado puede transformarse en calor por medio de la resistencia de frenado interna. La activación del chopper de frenado se controla por software. La resistencia de frenado interna está protegida por software y hardware frente a posibles sobrecargas.
Si en un caso de aplicación especial no bastara la potencia de las resistencias internas de frenado, éstas se pueden desconectar eliminando el puente entre los pines BR-CH y BR-INT del conector [X9]. En su lugar, entre los pines BR-CH y BR-EXT se conecta una resistencia de frenado externa. Esta resistencia de frenado no debe encontrarse por debajo de los valores mínimos especificados (véase Tabla A.9 pág. 122). La salida está protegida frente a un cortocircuito de la resistencia de frenado o de su cable entrante.
Advertencia
¡PELIGRO!
El pin BR-CH presenta un potencial positivo del circuito intermedio, por lo que no está protegido frente a una conexión a tierra o a un cortocircuito contra la tensión de la red o de una tensión negativa del circuito intermedio.
Advertencia
¡Alta tensión eléctrica!
No es posible un funcionamiento simultáneo de las resistencias de frenado internas y externas. Las resistencias de frenado externas no están protegidas automáticamente frente a sobrecargar por parte del aparato.
3.4 Interfaces de comunicación
El servocontrolador de posición CMMP-AS dispone de varios interfaces de comunicación. En el servocontrolador de posición hay un interfaz RS232 que tiene una importancia fundamental para la conexión de un PC y para el uso de la herramienta de parametrización Festo Configuration Tool (FCT).
El servocontrolador de posición CMMP-AS cuenta además con un interface CANopen en la
unidad básica.
Como opción de expansión a través de módulos enchufables se puede utilizar PROFIBUS-DP.
El servocontrolador de posición trabaja siempre con la presente versión del producto como slave en el bus de campo.

3. Descripción del producto
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 31
3.4.1 Perfil de Festo para manipulación y posicionamiento (FHPP)
Festo ha desarrollado y optimizado un perfil de datos especialmente adaptado a tareas de manipulación y posicionamiento, el "Festo Handling and Positioning Profile".
El FHPP permite un control y una programación uniformes para los diferentes sistemas de bus de campo y controladores de Festo.
Para ello define ampliamente lo siguiente para el usuario modos de funcionamiento, estructura de datos I/O, objetos de parámetro, control secuencial.
Comunicación del bus de campo
Selección de registro Modo directo Canal de parámetros
1
2
…
n
Par Posición Velocidad Acceso libre a
todos los
parámetros
de lectura y
escritura
Figura 3.2 Principio del FHPP

3. Descripción del producto
32 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
3.4.2 Interface RS232
El protocolo RS232 se ha previsto fundamentalmente como interface de parametrización,
si bien permite también el control del servocontrolador de posición CMMP-AS en el modo de prueba.
Error de comunicación RS232
El interface de parametrización se comunica con el CMMP-AS a través del interface serie, que además se puede utilizar para ensayos. La velocidad de transmisión por defecto del interface serie es de 9.600 Baudios. Durante el funcionamiento, por lo general la velocidad de transmisión aumenta a 115 KBaudios para que la comunicación sea más rápida.
La recepción de caracteres se realiza controlada por interrupción. Los caracteres recibidos se guardan en una memoria intermedia en anillo. Si se sobrepasa la memoria intermedia, se activa un bit de error y se emite un mensaje de error. El envío de cadenas de caracteres tiene lugar en el Polling y por lo tanto si es necesario en el programa marco.
Se utiliza un protocolo ASCII y se transmiten los denominados objetos de comunicación.
A través de estos objetos de comunicación se puede acceder a los valore reales y parámetros del controlador del motor paso a paso. Todas las magnitudes físicas se transmiten en unidades básicas estandarizadas. En la siguiente tabla está definida la
sintaxis de órdenes de los objetos de comunicación:
Orden Respuesta Descripción
Escribir objeto:
OW:NNNN:DDDDDDDD
OK!
o bien
OW:FFFF FFFF
Cuando no hay errores siempre se envía de vuelta
‚OK!‘. Si se produce un error, la orden se envía con
un código de error.
Respuesta en principio de 32 bits. Si se produce un
error, la orden se envía con un código de error.
Leer objeto:
OR:NNNN
NNNN:DDDDDDDD
o bien
OR:FFFF FFFF
Leer valor interno:
OI:NNNN
NNNN:DDDDDDDD
o bien
OI:FFFF FFFF
Respuesta en principio de 32 bits. Si se produce un
error, la orden se envía con un código de error.
Leer valor mínimo:
ON:NNNN
NNNN:DDDDDDDD
o bien
ON:FFFF FFFF
Respuesta en principio de 32 bits. Si se produce un
error, la orden se envía con un código de error.
Leer valor máximo:
OX:NNNN
NNNN:DDDDDDDD
o bien
OX:FFFF FFFF
Respuesta en principio de 32 bits. Si se produce un
error, la orden se envía con un código de error.
Tabla 3.1 Sintaxis de órdenes de los objetos de comunicación

3. Descripción del producto
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 33
Letra Significado (todo hexadecimal)
NNNN Número de objeto de comunicación
DD...D Bytes de datos
FF...F Código de error:
0x00000002 Valor de datos demasiado bajo > no escrito
0x00000003 Valor de datos demasiado alto > no escrito
0x00000004 Valor de datos demasiado bajo > escrito pero limitado antes
0x00000005 Valor de datos demasiado alto > escrito pero limitado antes
0x00000008 Valor de bit constante no permitido
0x00000009 El valor de datos de bit no está permitido actualmente (en este modo de
funcionamiento)
0x00000010 Error de lectura o escritura en flash
0x00020000 El límite inferior para el objeto no existe
0x00030000 El límite superior para el objeto no existe
0x00040000 No hay ningún objeto con este número (el objeto no existe)
0x00050000 El objeto no puede ser escrito.
Tabla 3.2 Significado de las abreviaciones
Además de las órdenes para el acceso a los objetos de comunicación existen otras órdenes para el control del controlador del motor paso a paso.
La tabla siguiente ofrece un resumen del conjunto de órdenes utilizado:
Orden Respuesta Descripción
BAUDbbbb OK! Establecer velocidad de transmisión
BOOT? SERVICE / APPLICATION Interrogación del estado: ¿Bootloader
activo?
BUS? xxxx:BUS:nn:bbbb:mmmm Estado del bus CAN
INIT! Mensaje de conexión Cargar conjunto de parámetros por defecto
RESET! Mensaje de conexión Activar reinicio de hardware
SQT+ xxxx:CQT+ Borrar memoria de errores
SAVE! DONE Guardar conjunto de parámetros en FLASH
SEP! DONE Cargar conjunto de parámetros desde
FLASH
TYP? TYP:dddd Consulta del tipo
VERSION? xxxx:VERSION:dddd Consulta de la versión
=iiiiss:dd.. =iiiiss:dd.. Simulación SDO acceso de escritura
?iiiiss =iiiiss:dd.. Simulación SDO acceso de lectura
ERROR! Orden desconocida / error
Tabla 3.3 Conjunto de órdenes

3. Descripción del producto
34 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Letra Significado (todo hexadecimal)
xxxx Indicación de estado
dddd Bytes de datos
nn Número de nodo
bbbb Velocidad de transmisión
mmmm Modo
iiii Índice del objeto SD CANopen
ss Subíndice del objeto SD CANopen
Tabla 3.4 Significado de las abreviaciones
3.4.3 Interface RS485
El interface RS485 se encuentra en el mismo conector enchufable que el interface RS232. El usuario debe activar la comunicación por separado. No obstante, es posible recibir los avisos de RS232 incluso con la comunicación RS485 activada, de forma que el aparato permanece siempre accesible para la parametrización.
El protocolo descrito en Error de comunicación RS232 se amplía con un direccionamiento de nodo. El número de nodo se determina con el interruptor giratorio de codificación.
El número de nodo FFh está reservado para telegramas Broadcast.
La velocidad de datos está limitada a 115 kBit/s.
3.4.4 Bus CAN
En los servocontroladores de posición de la serie CMMP-AS está implementado el protocolo CANopen conforme a DS301 con el perfil de aplicación DSP402.
Comunicación CAN
La comunicación CAN tiene lugar a través de un protocolo conforme a CANopen (DSP402).
Para la comunicación a través del bus CAN existen fundamentalmente dos tipos de acceso distintos: acceso con confirmación mediante los llamados SDO y acceso mediante los
llamados PDO sin handshake. El regulador se parametriza mediante SDO y se controla durante el servicio activo mediante PDO.
SDO Service Data Object Uso para la parametrización del regulador
PDO Process Data Object Intercambio más rápido de datos de proceso
(p. ej. valor real de número de revoluciones)
Los accesos SDO se inician siempre desde el control de nivel superior. Éste envía una
demanda para modificar un parámetro o una demanda para leer un parámetro. El regulador responderá a todas las demandas, ya sea mediante el envío del parámetro solicitado o mediante una confirmación del proceso de escritura. El regulador facilita el tratamiento de dos objetos para SDO.

3. Descripción del producto
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 35
Uno de ellos es un objeto para demandas por parte del control de nivel superior y el otro está previsto para las respuestas. Los PDO se utilizan para transmitir datos de proceso orientadas a eventos. Los PDO contienen uno o varios parámetros o datos definidos
previamente. No se utiliza un handshake, como en los SDO.
Además de los SDO sencillos para la configuración de las funciones más importantes del controlador también están implementados el "Position Profile Mode" y el "Interpolated Position Mode".
Están implementados el protocolo CANopen así como el protocolo FHPP utilizado por Festo. Para ello se ha adaptado y ampliado el control secuencial CAN interno.
3.4.5 PROFIBUS
Compatibilidad con la comunicación PROFIBUS según DP-V0.
Asimismo, también existe la posibilidad de incluir el aparato en los sistemas de mando a través de una reproducción de I/O a través de PROFIBUS. Desde el punto de vista del control, esta opción ofrece las mismas funcionalidades que las de un acoplamiento de PLC convencional a través de un cableado paralelo con las I/O digitales del aparato.
Por medio de un mensaje específico de Festo cabe, además, la posibilidad de acceder a todas las funciones específicas del aparato por medio de las funciones definidas por FHPP .
3.4.6 Funciones de I/O y mando del equipo
Las funciones de mando elementales son proporcionadas por diez entradas digitales (compare con el capítulo A.6.3 Interface I/O [X1], pág. 126).
Para memorizar los objetivos de posicionamiento, el servocontrolador de posición CMMP-AS cuenta con una tabla en la que se memorizan los objetivos del posicionamiento, pudiéndose acceder a ellos más tarde. Como mínimo, cuatro entradas digitales sirven para seleccionar el objetivo, y otra entrada se utiliza a modo de entrada de arranque.
Los detectores de final de carrera sirven para delimitar la seguridad de la zona de movimiento. Durante un recorrido de referencia, cada uno de los dos detectores de final de carrera pueden utilizarse como punto de referencia para el control del posicionamiento.
Dos entradas sirven para activar la etapa de salida del hardware, así como para activar el regulador.
Para tareas de tiempo crítico, se dispone de entradas sample de alta velocidad para distintas aplicaciones (recorrido de referencia, aplicación especial, etc.).
El servocontrolador de posición CMMP-AS cuenta con tres entradas analógicas para el nivel de entrada en el rango de +10 V a -10 V. Una de las entradas es una entrada diferencial (16 bits) que permite garantizar una elevada seguridad contra perturbaciones. Dos entradas (10 bits) se han ejecutado como salidas de un solo extremo. Las señales analógicas son cuantificadas y digitalizadas por el convertidor analógico-digital con una resolución de 16 o 10 bits. Las entradas analógicas sirven para especificar los valores nominales (velocidad o par) para la regulación.

3. Descripción del producto
36 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
En las aplicaciones convencionales, las entradas digitales existentes ya están asignadas a funciones básicas. Para el uso de otras funciones, como p. ej. el funcionamiento tipo teach-in, una entrada separada "Inicio de recorrido de referencia" o una entrada de
parada, opcionalmente se dispone del uso de las entradas analógicas AIN1 y AIN2, también utilizables como entradas digitales DIN12 y DIN13, así como las salidas digitales DOUT2 y DOUT3, que también se pueden utilizar como entradas digitales. Como alternativa también se puede utilizar el módulo de expansión de I/O CAMC-8E8A .
Cuando se usen las entradas analógicas AIN1 y AIN2 como entradas digitales, hay que establecer la conexión de masa de AGND con GND24 en el conector [X1], pines 14 y 6.
Importante
Mediante la conexión entre AGND y GND24, la protección frente a una sobretensión de la electrónica deja de ser efectiva.
Detector de final de carrera
Limit switch active
Actual speed value(1)
Actual speed value(2)
t1
t2
t3
t4
t1 < 250 µs (tcycN)
t2 = N x 250 µs (tcycN) En función de la rampa de parada rápida
t3 < 10 ms
t4 = M x 250 µs (tcycN) En función de la rampa de velocidad
Figura 3.3 Temporización de secuencia de conexión
Valor de lista de número de revoluciones(1): Bloqueo continuo del sentido de giro por parte del detector de final de carrera.
Valor de lista de número de revoluciones(2): No hay ningún bloqueo continuo del sentido de giro por parte del detector de final de carrera.

4. Cuadro general de funciones
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 37
4. Cuadro general de funciones
4.1 Motores
4.1.1 Servomotores sincrónicos
En los casos típicos de aplicación se emplean máquinas sincrónicas permanentemente excitadas con onda sinusoidal de EMC. El servocontrolador de posición CMMP-AS es un servocontrolador de posición universal que permite el funcionamiento con servomotores estándar. Los datos del motor son determinados y parametrizados mediante una identificación automática del motor.
4.1.2 Motores lineales
Además de aplicaciones rotatorias, los servocontroladores de posición CMMP-AS también son aptos para actuadores lineales. En este caso, también son compatibles motores lineales sincrónicos permanentemente excitados. Debido a la gran calidad de procesamiento de las señales, los servocontroladores de posición de la gama de aparatos CMMP-AS deben ser activados por motores sincrónicos sin núcleo con reducida inductividad del motor (2 a 4 mH), siendo especialmente aptos en el caso de las señales de los transmisores y de una alta frecuencia de ciclos.
4.2 Funciones del servocontrolador de posición CMMP-AS
4.2.1 Funciones
PWM M
Position
controller
Speed
controller
Current
controller
Power
stage Motor
Angle encoder
1 and 2
Actual value management
X2A
X2B
X10
Set point management:
- Analogue inputs
- Fixed values
- Synchronization
- Ramp generator
Position control and
Interpolation
Trajectories calculation:
- Reference position
- Motorspeed precontrol
- Motorcurrent precontrol E1 E2
Figura 4.1 Estructura de regulación del CMMP-AS

4. Cuadro general de funciones
38 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
La figura 4.1 muestra la estructura de regulación básica del CMMP-AS. El regulador de corriente, el regulador del número de revoluciones y el controlador de posición se encuentran dispuestos para una regulación en cascada. En virtud del principio de regulación orientado al rotor, la corriente puede especificarse por separado en forma de la fracción de corriente activa (iq) y de la fracción de corriente reactiva (id).
Por esta razón hay dos reguladores de corriente, los cuales se han concebido como reguladores PI. En Figura 4.1 no se ha representado el regulador id para lograr mayor
claridad.
Como modos de funcionamiento fundamentales se han previsto la regulación del par de giro con limitación del número de revoluciones, la regulación del número de revoluciones con limitación del par de giro y el posicionamiento. Las funciones tales como la sincronización o el "corte flotante", son variantes de estos modos de funcionamiento básicos.
4.2.2 Modulación de la duración de impulsos (PWM)
Los servocontroladores de posición CMMP-AS disponen de la posibilidad de ajustar de forma variable la frecuencia de ciclos en el circuito. Para evitar pérdidas por conmutación, la frecuencia de ciclos de la modulación de la duración de impulsos se puede reducir a la mitad con respecto a la frecuencia en el circuito del regulador de corriente.
El servocontrolador de posición CMMP-AS dispone además de una modulación sinusoidal o, alternativamente, de una modulación sinusoidal a un tercio de ondas armónicas. Esto aumenta la tensión de salida efectiva del convertidor. Por medio del software de parametrización FCT se puede seleccionar el tipo de modulación. El ajuste estándar es la modulación sinusoidal.
Tensión de salida del convertidor
Tensión de salida en los bornes del motor
UA,(sin) ULL,motor = aprox. 320 Vef
UA,(sin+sin3x) ULL,motor = aprox. 360 Vef
Tabla 4.1 Tensión de salida en los bornes del motor siendo UZK = 560 V

4. Cuadro general de funciones
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 39
4.2.3 Gestión del valor nominal
Para los modos de funcionamiento con regulación del par de giro y regulación del número
de revoluciones, el valor nominal se puede especificar por medio de una gestión del valor nominal.
Como fuentes del valor nominal se pueden seleccionar:
- 3 entradas analógicas:
AIN 0, AIN 1 y AIN 2
- 3 valores fijos: 1. valor: Ajuste en función de la lógica de habilitación del regulador:
- Valor fijo 1 o
- Interface RS232 o
- Interface de bus CANopen o
- Interface PROFIBUS-DP
2. y 3. valor: Ajuste de los valores fijos 2 y 3
- Entrada SYNC
Información
Si no hay ninguna fuente de valores nominales activada, entonces el valor nominal es cero.
En la gestión del valor nominal hay disponible un generador de rampas con un mecanismo sumador preconectado. Por medio de los correspondientes selectores, se puede realizar una selección arbitraria de las fuentes del valor nominal anteriormente indicadas e introducirla por medio del generador de rampas. Por medio de otros dos selectores se pueden seleccionar fuentes adicionales como valores nominales, los cuales no son introducidos a través del generador de rampas. El valor nominal total se obtiene de la suma de todos los valores. La rampa se puede parametrizar en cuanto al tiempo de aceleración y de frenado en función del sentido.
4.2.4 Funcionamiento regulado por el momento de giro
En el funcionamiento regulado por el par de giro se especifica un determinado par de giro que genera el servorcontrolador en el motor. En este caso sólo se activa el regulador de
corriente, pues el par de giro es proporcional a la corriente del motor.

4. Cuadro general de funciones
40 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
4.2.5 Funcionamiento regulado por la velocidad
Este modo de funcionamiento se usa cuando hay que mantener constante el número de
revoluciones del motor independientemente de la carga efectiva. El número de revoluciones del motor sigue exactamente el número de revoluciones especificado por la gestión del valor nominal.
El tiempo de ciclo del circuito de regulación del número de revoluciones en el servocontrolador de posición CMMP-AS es de 250 µs.
El regulador del número de revoluciones se ha diseñado como regulador PI y posee una resolución de 12 bits por r.p.m. Para impedir "efectos wind-up", la función del integrador se detiene al alcanzarse las limitaciones a las que está sujeta.
En el modo de funcionamiento de la regulación del número de revoluciones, los reguladores de corriente y el regulador del número de revoluciones están en acción. En caso de especificación a través de entradas analógicas del valor nominal, opcionalmente se puede definir un "cero seguro". Si el valor nominal analógico se encuentra en este rango, entonces el valor nominal se pone a cero ("zona muerta"). De este modo, se pueden suprimir las averías o desplazamientos de offset. La función de una zona muerta se puede activar y desactivar, así como ajustarse su amplitud.
La determinación del valor real del número de revoluciones y de la posición real se realiza
desde el sistema transmisor interno del motor que se emplea también para tareas de conmutación. Para la retroalimentación del valor real para la regulación del número de revoluciones, se pueden seleccionar con el mismo valor todos los interfaces (p. ej. el transmisor de referencia o el correspondiente sistema en la entrada externa del transmisor incremental).
El valor de lista del número de revoluciones para el regulador del número de revoluciones es reconducido entonces, p. ej. a través de la entrada externa del transmisor incremental.
El valor nominal de referencia para el número de revoluciones se puede especificar internamente o incluso derivarse a partir de los datos de un sistema transmisor externo (sincronización del número de revoluciones a través de [X10] para el regulador del número de revoluciones).
Mensaje del número de revoluciones
Speed setpointActual speed
DOUT:Setpoint speed
reached
t1 t1
t2 t2
t1 < 500 µs (tcycP) t2 < 500 µs (tcycP)
Figura 4.2 Mensaje del número de revoluciones

4. Cuadro general de funciones
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 41
4.2.6 Regulación del número de revoluciones limitada por el par de giro
Los servocontroladores de posición CMMP-AS soportan un funcionamiento regulado por la
velocidad y limitado por el par de giro, con las siguientes características:
- Actualización rápida del valor límite, p. ej. en la trama de 200 µs
- Adición de dos fuentes de limitación (p. ej. para los valores de servopilotaje)
4.2.7 Sincronización con fuentes de pulsos externas
Los reguladores funcionan con una aplicación de corriente sinusoidal El tiempo de ciclo siempre está ligado de forma fija a la frecuencia PWM. Con fines de la sincronización de la regulación del aparato con fuentes de pulsos externas (p. ej. PROFIBUS MC), el aparato dispone de la correspondiente PLL. El tiempo de ciclo es variable en límites en estos casos, para permitir la sincronización con la señal de ciclo externa
4.2.8 Compensación del momento de la carga en ejes verticales
Para las aplicaciones en ejes verticales se puede registrar y memorizar el momento de fijación en estado de parada. En tal caso encuentra aplicación como intercalación en el circuito de regulación del par y mejora las características de puesta en marcha del eje tras
soltarse el freno de retención.
4.2.9 Posicionamiento y regulación de la posición
En el funcionamiento de posicionado, además del modo de funcionamiento con regulación del número de revoluciones hay activo un controlador de posición de nivel superior que procesa las divergencias entre la posición nominal y real y las convierte en los correspondientes valores nominales de referencia para el regulador del número de revoluciones.
El controlador de posición se ha diseñado en forma de regulador P. El tiempo de ciclo del circuito regulador de la posición es 2 veces el tiempo de ciclo del regulador del número de revoluciones.
Cuando se conmuta el controlador de posición, este recibe sus valores nominales del control de posicionamiento o del control de sincronización. La resolución interna es de hasta 32 bits por revolución del motor (dependiendo del transmisor empleado).

4. Cuadro general de funciones
42 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Posicionamiento / objetivo alcanzado
Start positioning
Positioning running
DOUT1: MC
Target position
Actual position
t1 t4
t2
t3
DIN0 - DIN3 +DIN10 & DIN11
t5
t1 > 500 µs (tcycP) Duración de los impulsos de la señal de INICIO (START)
t2 < 1 ms (tcycIPO) Retardo, hasta que arranca el accionamiento
t3 = N x 1 ms (tcycIPO) Ventana de destino alcanzada + retardo de respuesta
t4 > 500 µs (tcycP) Tiempo de ajuste (Setup) de selección de posiciones
t5 > 1 ms (tcycIPO) Tiempo de demora (Hold) de selección de posiciones
Figura 4.3 Temporización de posicionamiento
4.2.10 Sincronización, engranaje eléctrico
El servocontrolador de posición CMMP-AS permite un funcionamiento master-slave, el cual se denominará sincronización de aquí en adelante. El regulador puede actuar tanto de master como de slave.
Cuando el servocontrolador de posición CMMP-AS actúa como master, puede facilitar a un slave su posición de rotor actual en la entrada del transmisor incremental [X11]. Si el servocontrolador de posición CMMP-AS dispone de un interface de comunicación,
entonces optativamente puede transmitir como master su posición actual, el número de revoluciones o ambas magnitudes.
Si el servocontrolador de posición CMMP-AS debe actuar como slave, hay distintas entradas disponibles para la sincronización. Como entradas se pueden emplear un transmisor incremental (sincronización de la posición a través de [X10] con servopilotaje del número de revoluciones para el regulador del número de revoluciones) o el interface de comunicación. El servopilotaje del número de revoluciones lo puede calcular por sí

4. Cuadro general de funciones
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 43
mismo el servocontrolador de posición CMMP-AS. Se pueden activar o desactivar todas las entradas. El transmisor interno se puede desconectar de forma opcional cuando se selecciona otra entrada como transmisor del valor real. Esto también es válido en el modo de funcionamiento de regulación del número de revoluciones. Las entradas externas
pueden ser ponderadas en función de factores del engranaje. Las distintas entradas se puede usar por separado o incluso simultáneamente.
4.2.11 Gestión del frenado
El servocontrolador de posicionamiento CMMP-AS puede activar directamente un freno de retención. El manejo del freno de retención se realiza con los tiempos de retardo programables. En el modo de funcionamiento del posicionado se puede activar adicionalmente una función de frenado automático que desconecta la etapa final del servocontrolador de posición CMMP-AS tras un tiempo de reposo parametrizado y que hace que se aplique el freno.
4.3 Control de posicionamiento
4.3.1 Resumen
En el modo de posicionamiento se especifica una posición determinada hasta la que debe
desplazarse el motor. La posición actual se obtiene de las informaciones de la evaluación interna del transmisor. La desviación de la posición es procesada por el controlador de posición y transmitida al regulador del número de revoluciones.
El control de posicionamiento integrado permite un posicionamiento con limitación de sacudidas o con optimización del tiempo de forma relativa o absoluta con respecto a un punto de referencia. Esta especifica valores nominales al controlador de posición y también al regulador del número de revoluciones para la mejora de la dinámica.
En el caso de un posicionamiento absoluto se realiza un desplazamiento directo hasta la posición de destino especificada. En el caso del posicionamiento relativo se realiza un desplazamiento a lo largo de un tramo parametrizado. El intervalo de posicionamiento
de 232
giros completos sirve para que con frecuencia se pueda realizar un posicionamiento
relativo en un sentido arbitrario.
La parametrización del control de posicionamiento se realiza por medio de una tabla de objetivos. Esta incluye entradas para la parametrización de un objetivo a través de un interface de comunicación y de otras posiciones de destino adicionales a las que puede accederse por medio de entradas digitales. Para cada entrada se puede especificar el método de posicionamiento, el perfil de movimiento, los tiempos de aceleración y frenado
y la velocidad máxima. Todos los objetivos se pueden parametrizar previamente. En tal caso, durante el posicionamiento sólo hay que seleccionar la entrada y dar una orden de arranque. Sin embargo, los parámetros objetivo también se pueden modificar online a través del interface de comunicación.
En el servocontrolador de posición CMMP-AS, el número de registros de posición memorizables es de 250 a través del bus de campo y de 255 a través de las I/O.

4. Cuadro general de funciones
44 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Con todos los registros de posición se dan las siguientes opciones de ajuste: Posición de destino Velocidad de posicionado
Velocidad final Aceleración Deceleración Pilotaje del momento Mensaje de recorrido remanente Indicadores (flags) adicionales concretos:
- relativo/relativo a último objetivo/absoluto
- esperar a final/interrumpir/ignorar inicio
- sincronizados
- Eje cilíndrico: sentido de movimiento especificado de forma fija
- Opción: frenado automático en ausencia de posicionamiento de conexión
- Opción: velocidad continua durante la tarea de posicionado modificable por medio de entrada analógica
- Distintas opciones para configurar programas de recorrido
Los registros de posicionado pueden ser enviados como respuesta a través de todos los
sistemas de bus o por medio del software de parametrización. La secuencia de posicionado se puede controlar por medio de entradas digitales.
4.3.2 Posicionamiento relativo
En el caso de un posicionamiento relativo, la posición de destino se suma a la posición actual. Es necesario un referenciado para desplazar el accionamiento hasta una posición definida.
Mediante la yuxtaposición de posicionamientos relativos se puede realizar el posicionado en un sentido, p. ej. en una unidad de corte a medida o en una cinta transportadora sin fin (dimensión incremental).
4.3.3 Posicionamiento absoluto
El destino de posición se alcanza en este caso independientemente de la posición actual. Para poder ejecutar un posicionamiento absoluto se recomienda referenciar previamente el accionamiento. Durante un posicionamiento absoluto la posición de destino es una posición fija (absoluta), referida al punto cero o punto de referencia.

4. Cuadro general de funciones
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 45
4.3.4 Generador de perfiles de movimiento
En los perfiles de movimiento se distingue entre un posicionamiento óptimo con relación
al tiempo y un posicionamiento con limitación de sacudidas. En el posicionamiento óptimo con relación al tiempo, la puesta en marcha y el frenado se realizan con la aceleración y deceleración máximas especificadas. El accionamiento se desplaza hasta el objetivo en el mínimo tiempo posible, la secuencia de la velocidad es trapezoidal y la de la aceleración tiene un sección cuadrangular o rectangular. En el posicionamiento con limitación de las sacudidas la secuencia de la aceleración presenta una forma trapezoidal, por lo que la secuencia de la velocidad es de tercer grado. Como se produce una variación continua de la aceleración, el accionamiento se desplaza respetando especialmente el sistema mecánico.
a(t) a(t) a(t)
t tt
v(t)
t
v(t)
t
v(t)
t
at time optimal jerk limit jerk limit
Figura 4.4 Perfiles de movimiento en el servocontrolador de posición CMMP-AS; t1<t2<t3, cuando amáx 1, amáx 2, y amáx 3 son iguales
4.3.5 Recorrido de referencia
Cada control de posicionamiento precisa durante el inicio del funcionamiento un punto cero definido que se determina por medio de un recorrido de referencia. Este recorrido de
referencia lo puede realizar autónomamente el servocontrolador de posición CMMP-AS. Como señal de referencia éste evalúa distintas entradas, como p. ej. las entradas de los detectores de final de carrera.
Un recorrido de referencia se puede iniciar con una orden a través del interface de
comunicación o automáticamente en caso de activación del regulador. Opcionalmente también se puede configurar el inicio a través de una entrada digital por medio del software de parametrización FCT para realizar un recorrido de referencia controlado y no hacerlo dependiendo de la activación del regulador. La activación del regulador permite realizar el acuse de recibo de los mensajes de error, pudiéndose también desconectar en función de la aplicación sin que sea necesario un recorrido de referencia con una nueva activación. Como las entradas digitales existentes están asignadas en las aplicaciones convencionales, opcionalmente se dispone para ello de las entradas analógicas AIN1 y

4. Cuadro general de funciones
46 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
AIN2 como entradas digitales DIN AIN1 y DIN AIN2, así como de las salidas digitales DOUT2 y DOUT3 como entradas digitales DIN10 y DIN11.
Para el recorrido de referencia se han implementado varios métodos como apoyo para el
protocolo CANopen DSP402. En la mayoría de métodos primero se busca un interruptor a la velocidad de búsqueda. El movimiento restante depende del método y tipo de comunicación.
Para el recorrido de referencia se pueden parametrizar las rampas y las velocidades. El recorrido de referencia también se puede realizar con optimización del tiempo y sin sacudidas.
4.3.6 Secuencias de posicionamiento
Las secuencias de posicionamiento constan de una secuencia en serie de registros de posiciones. Estos se recorren de forma consecutiva. Un registro de posición puede llegar a formar parte de un programa de recorrido por medio de sus opciones del programa de recorrido. De este modo se obtiene una lista interconectada de posiciones:
POS1
POS13
POS19
START
END
POS5 POS6
POS7 POS8
Figura 4.5 Programa de recorridos
El usuario determinar por medio de la posición inicial del programa de recorrido qué secuencia de posiciones deben recorrerse. En principio son posibles secuencias lineales o cíclicas. El final de una secuencia de posiciones se señaliza mediante la opción "END".
La posición inicial del programa de recorrido puede determinarse:
Posición inicial - Mediante bus de campo
- Por medio de entradas digitales
El número de posiciones en la correspondiente secuencia de posicionamiento está limitada por el número de posiciones totales disponibles.

4. Cuadro general de funciones
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 47
En el programa de recorrido se puede emplear cada registro de posición. Para ello, con todos los registros de posición se dan las siguientes opciones de ajuste:
Posibilidades de ajuste
- Números de posición consecutiva para dos elementos consecutivos (son posibles varios elementos consecutivos en caso de conexión progresiva mediante entradas digitales)
- Tiempo de retardo de la aproximación
- Espera hasta la conexión progresiva mediante entradas digitales en el extremo del posicionamiento
- Activar una salida digital cuando se alcanza el destino de la posición o cuando se inicia la posición
4.3.7 Entrada de parada opcional
La entrada de parada opcional puede interrumpir el posicionamiento en curso activando la entrada digital ajustada. En caso de anularse la entrada digital, el posicionamiento se seguirá efectuando a la posición de destino original. Como las entradas digitales existentes están asignadas en las aplicaciones convencionales, opcionalmente se dispone para ello de las entradas analógicas AIN1 y AIN2, así como de las salidas digitales DOUT2 y DOUT3, las cuales también se pueden usar como entradas digitales.

4. Cuadro general de funciones
48 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
4.3.8 Control de trayectoria con interpolación lineal
La implementación del "interpolated position mode" permite especificar valores
nominales de posición en una aplicación del regulador con varios ejes. Para ello, en una retícula de tiempo fija (intervalo de sincronización) una unidad de control de nivel superior define los valores nominales de posición. Si el intervalo es mayor que un ciclo del controlador de posición, el controlador regula de forma autónoma los valores de datos entre dos valores de posición especificados, tal como se representa esquemáticamente en el siguiente gráfico. El servocontrolador de posición calcula además un servopilotaje correspondiente del número de revoluciones.
Figura 4.6 Interpolación lineal entre dos valores de datos
4.3.9 Posicionamiento con varios ejes con sincronización del tiempo
El temporizador de sincronización permite realizar movimientos al mismo tiempo en aplicaciones con varios ejes, en combinación con el "interpolated position mode". Todos los reguladores del servocontrolador de posición CMMP-AS, es decir, toda la cascada de
reguladores, son sincronizados con la señal externa del temporizador. Los valores de posición existentes con varios ejes se adoptan y se aplican así al mismo tiempo sin fluctuaciones. Como señal del temporizador se puede usar, p. ej., un mensaje de sincronización de un sistema de bus CAN.
De este modo es posible, p. ej., desplazar hasta el destino varios ejes con distintas longitudes de recorrido y diferentes velocidades de desplazamiento en el mismo instante.
1 Retícula de tiempo
valor de posición
2 Tiempo de ciclo
regulación de posición
3 Desarrollo
interpolado de la posición
4 Desarrollo
recorrido de la posición

5. Técnica funcional de seguridad
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 49
5. Técnica funcional de seguridad
5.1 Uso previsto general
Los controladores de posición de la familia CMMP-AS soportan la función de seguridad "Safe Torque off (STO)" y "Safe Stop 1 (SS1)" con protección frente a una marcha imprevista conforme a los requerimientos de las normas EN 61508, SIL 2 y EN ISO 13849−1, PL d.
La parada de la máquina debe ser provocada y asegurada a través de la unidad de control de la máquina. Esto es válido especialmente para ejes verticales sin sistema mecánico autobloqueante o sin contrapeso.
Según la directriz para máquinas 2006/42/EG el fabricante de la maquinaria debe realizar una evaluación de riesgos. En base a la evaluación de riesgos, el fabricante de la maquinaria debe proyectar el sistema de seguridad para toda la máquina, incluyendo todos los componentes integrados. Entre ellos se cuentan también los accionamientos eléctricos.
Para la evaluación de riesgos la nueva norma EN ISO 13849 utiliza un gráfico de riesgos modificado y un principio diferente para cumplir los requisitos en comparación con la norma EN 954.
1 Punto de partida para evaluar la contribución en la reducción de riesgos
L Baja contribución en la reducción de riesgos
H Alta contribución en la reducción de riesgos
PL Nivel de rendimiento requerido
Figura 5.1 Gráfico de riesgos para la determinación del PLr

5. Técnica funcional de seguridad
50 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Parámetro Significado
S Gravedad de la lesión
S1 Leve (normalmente lesión reversible)
S2 Grave (normalmente lesión irreversible, incluida la muerte)
F Frecuencia y/o duración de la exposición al peligro
F1 Raramente o con poca frecuencia y/o el tiempo de exposición al peligro es corto
F2 Con frecuencia o continuamente y/o el tiempo de exposición al peligro es largo
P Posibilidad de evitar el peligro o de limitar los daños
P1 Posible bajo determinadas circunstancias
P2 Poco probable
Tabla 5.1 Parámetros de riesgo
La norma EN 60204-1 trata, entre otras cuestiones, las acciones en caso de emergencia y define los conceptos de DESCONEXIÓN DE EMERGENCIA y PARADA DE EMERGENCIA (véase la tabla siguiente).
Acción Definición (EN 60204-1) Caso de peligro
DES-
CONEXIÓN
DE
EMERGENCIA
Seguridad eléctrica en caso de emergencia
por desconexión de la energía eléctrica en
toda la instalación o en una parte de ella.
La DESCONEXIÓN DE EMERGENCIA debe
aplicarse cuando haya riesgo de
electrocución o cualquier otro riesgo de
origen eléctrico.
PARADA DE
EMERGENCIA
Seguridad funcional en caso de emergencia
por parada de una máquina o piezas en
movimiento.
La PARADA DE EMERGENCIA está prevista
para detener un proceso o un movimiento,
siempre que estos impliquen una amenaza
de algún tipo.
Tabla 5.2 DESCONEXIÓN DE EMERGENCIA y PARADA DE EMERGENCIA según EN 60204-1
La norma EN 61800-5-2 describe diversas funciones de seguridad, que pueden utilizarse dependiendo de la aplicación.
En el caso de los controladores de posición de la familia CMMP-AS, las funciones de seguridad STO y SS1 han sido realizadas mediante circuitos externos.

5. Técnica funcional de seguridad
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 51
Función de seguridad según EN 61800-5-2
Componente PILZ* Comportamiento de desconexión
Categoría de parada según EN 60204-1
STO Safe Torque Off PNOZ X2P
(Salidas de relés forzadas:
– 2 contactos de seguridad sin retardo
Posibilidades de conexión para:
– pulsador de PARADA DE EMERGENCIA
– detector de final de carrera de puerta
de protección
– pulsador de arranque)
0
SS1 Safe Stop 1 PNOZ XV2P
(Salidas de relés forzadas:
– 2 contactos de seguridad sin retardo
– 2 contactos de seguridad con retardo
de desconexión
Posibilidades de conexión idénticas a
X2P;
Retardo de desconexión fijo o ajustable;
Interrupción del tiempo de retardo
mediante tecla de reset)
1
Tabla 5.3 Cuadro general de la función de seguridad según EN 61800-5-2
*O bien un dispositivo de conmutación de seguridad comparable con sus correspondientes contactos de seguridad.
La tabla siguiente ofrece un resumen de las diferentes categorías de parada.
Categoría de parada
Clase Acción
0 Parada no controlada por desconexión
inmediata de la energía.
DESCONEXIÓN o PARADA DE EMERGENCIA
1 Parada controlada y desconexión de la
energía, cuando se ha producido la
parada.
PARADA DE EMERGENCIA
2 Parada controlada sin desconexión de la
energía durante la parada.
No apta para la DESCONEXIÓN o PARADA DE
EMERGENCIA
Tabla 5.4 Categorías de parada

5. Técnica funcional de seguridad
52 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
5.2 Función integrada "STO"
Advertencia
La funciones de seguridad generales no protegen de las descargas eléctricas (electrocución), sino exclusivamente de los movimientos peligrosos.!
5.2.1 Generalidades / Descripción "STO Safe Torque off"
Con la función Safe Torque off (STO) se interrumpe de forma segura la alimentación de energía del motor mediante la desconexión de la habilitación de paso de salida y de la alimentación de la etapa final de potencia. El accionamiento no puede generar ningún par de giro ni fuerza y por lo tanto ningún movimiento peligroso. Si se activa la función STO para un accionamiento en movimiento, el motor queda en marcha libre de forma descontrolada tras máx. 3,2 ms. Al mismo tiempo se activa el control de frenos
automático. Si se utilizan motores con freno de sostenimiento, el freno se desgastará con cada desconexión de STO. Por ello, con la función STO es preferible utilizar motores sin freno de sostenimiento. Ejemplos de aplicaciones para la función STO son intervenciones manuales durante trabajos de ajuste y preparación y la eliminación de fallos.
La aplicación de esta solución integrada tiene diversas ventajas:
Ventajas - menos componentes externos, como p. ej. contactores
- menos complejidad de cableado y menos espacio requerido en el armario de maniobra
- y por consiguiente, menos costes
Otra ventaja es la disponibilidad de la instalación. Gracias a la solución integrada, el circuito intermedio del servocontrolador puede permanecer cargado. De este modo no se producen unos tiempos de espera significativos durante el rearranque de la instalación.

5. Técnica funcional de seguridad
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 53
5.2.2 Diagrama de temporización de STO
t1 t2 t3 t5 t6 t7 t8 t10 t11 t12 t13t9t4
t
t
t
t
t
t
t
t
t
Triggering of pulse amplifier supply relay (optocoupler driver)
Supply of pulse amplifiers (optocoupler driver)
“ON“ (15V)
“OFF”
open
closed
“ON”
Timing of output
stage enabling
variable
Internal output stage enabling
(controlled by µP)
Set speed "n"
n=0
n
“H”
“H”
“H”
Seven-segment
display
Delay until brake is
released!
2. shut-down path
1. shut-down path
Discharge curve of
electrolytic capacitors for the
supply of the pulse amplifiers
“OFF”
“ON”
“OFF”
Ramp can be set via
Festo Configuration Tool
„FCT“
fixed
(0V)
Can be set via Festo Configuration Tool „FCT“
Releasing motor holding brake (X6.Y.1/2)released
(24V)
Controller enabling (X1.Y, DIN5)
Output stage enabling (X1.Y, DIN4)
Floating feedback contact for driver supply
(X3.Y.5/6)
Timing for activation of "Safe
Torque off" with safety
switchgear PNOZ.
"Safe Torque off"
X3.Y.2 (0V)
X3.Y.2 (24V)
"Safe Torque off"
tx
Figura 5.2 Diagrama de temporización para la función de seguridad STO

5. Técnica funcional de seguridad
54 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
5.2.3 Rearranque después de la activación de "Parada segura"
Antes de una nueva conexión es preciso asegurarse de que se han eliminado todos los
riesgos y de que la instalación se puede volver a poner en marcha de forma segura. Si existen zonas accesibles, debe realizarse manualmente una validación mediante el pulsador S2 (véase el ejemplo de conexión de circuitos).
Para conmutar de nuevo al estado activo la etapa final del servocontrolador de posición CMMP-AS y con ello accionar el motor conectado, hay que seguir los siguientes pasos:
1. La activación del relé para la conmutación de la tensión de alimentación de los excitadores de etapas de salida (2ª ruta de desconexión) se realiza hasta el momento t1 a través de [X3] con 24 V entre los pines 2 y 3.
2. Se carga la alimentación del excitador.
3. El contacto de acuse de recibo sin potencial ([X3], pines 5 y 6) para la verificación de plausibilidad entre la activación del relé para la alimentación del excitador se abre al cabo de un máx. de 20 ms tras t1 (t2-t1) y se desconecta la alimentación del excitador.
4. Aprox. 10 ms después de la apertura del contacto de recibo, se apaga la "H" en el visualizador en el momento t3.
5. El momento de habilitación de la etapa de salida ([X1], DIN4) se puede seleccionar
libremente (t4-t1) en gran medida. La habilitación puede realizarse al mismo tiempo que la activación del relé del excitador, aunque deben transcurrir aprox. 10 µs (t5-t4) delante del flanco ascendente de la habilitación del regulador ([X1], DIN5), dependiendo de la aplicación.
6. Con el flanco ascendente de habilitación del regulador al momento t5 se provoca la liberación del freno de sostenimiento del motor (si lo hay), produciéndose la habilitación interna del paso de salida. La liberación del freno sólo es posible si se da la activación del relé para la conmutación de la alimentación del excitador, pues con ello se activa un MOSFET que se encuentra en el circuito de corriente del freno de sostenimiento. Mediante el software de parametrización se puede ajustar un tiempo de retardo del inicio del desplazamiento (t6 – t5) que provoca que el accionamiento sea regulado durante el tiempo especificado con la velocidad "0" y que sólo se inicie con la velocidad ajustada una vez transcurrido dicho tiempo hasta el momento t6.
7. En el momento t7 el accionamiento ha alcanzado la velocidad ajustada. Los ajustes de rampa necesarios se pueden parametrizar por medio del software de parametrización FCT.
Importante
Si hay fuerzas externas que actúan sobre el accionamiento (p. ej. cargas en suspensión) deben tomarse medidas adicionales (p. ej. frenos mecánicos) para evitar riesgos.
Por ello es preferible la función Safe Stop (SS1), en la que se ocasiona una parada controlada del accionamiento.

5. Técnica funcional de seguridad
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 55
5.2.4 Ejemplo de conexión de circuito CMMP-AS STO
Figura 5.3 Esquema del circuito de función de seguridad STO con CMMP-AS

5. Técnica funcional de seguridad
56 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
5.2.5 Explicaciones del ejemplo de circuito
El ejemplo de conexión de circuito muestra una combinación del CMMP-AS con un dispositivo de conmutación de seguridad PILZ PNOZ X2P. Como dispositivo de
conmutación se ha dibujado una parada de emergencia en combinación con una puerta de protección. En total es posible conectar en serie tres elementos de conexión. Además, cabe la posibilidad de usar un interruptor de posición de puerta que mantiene cerrada la puerta de protección, hasta que el accionamiento se para o hasta que la señal "Acuse de recibo de la alimentación del excitador" indica un estado seguro y la verificación de plausibilidad concluye satisfactoriamente.
Las especificaciones técnicas, tales como la corriente máxima etc. se encuentran en la hoja de datos de los dispositivos de conmutación de seguridad.
5.2.6 Requerimiento de PARADA DE EMERGENCIA, control de puertas de protección
Tras accionar la parada de emergencia o abrir las puertas de protección, ambos contactos normalmente abiertos de K1 (13, 14 y 23, 24) se abren inmediatamente. Como consecuencia se cancela inmediatamente la habilitación del paso de salida y la alimentación del excitador mediante [X3] Pin 2. Es responsabilidad del explotador evitar la apertura involuntaria de las puertas de protección.
Aproximadamente 80 ms tras la apertura de los contactos PNOZ para desconectar la alimentación del excitador, se cierra el contacto de acuse de recibo ([X3], Pin 5 y 6).
Por lo menos 30 ms tras el cierre del contacto de acuse de recibo sin potencial, aparece "H" para visualizar la "Parada segura" en el visualizador de siete segmentos del servocontrolador.
En base al circuito de la ilustración, es posible un funcionamiento por dos canales con detección de circuitos cruzados. Esto permite detectar:
Conexiones a tierra en el circuito inicial y de entrada Cortocircuitos en el circuito de entrada / inicial Circuitos cruzados en el circuito de entrada.
La cancelación de la habilitación de paso de salida así como la alimentación del excitador mediante [X3] Pin 2 provocan que el accionamiento se detenga lentamente.

5. Técnica funcional de seguridad
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 57
5.2.7 Comprobación de la función de seguridad
El dispositivo PILZ PNOZ X2P comprueba en cada ciclo On/Off de la máquina si los relés
del dispositivo de seguridad abren y cierran correctamente.
Mediante el PLC se debe controlar regularmente el funcionamiento de la desconexión de la habilitación del paso de salida (p. ej. mensualmente)
Figura 5.4 Diagrama de bloques "Safe Torque off" según EN 61508, SIL 2
Precaución
Si no se precisa la función "Safe Torque off", es necesario puentear los pines 1 y 2 en [X3].
2

5. Técnica funcional de seguridad
58 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Para la "STO" según EN 61508 SIL 2 se requieren dos líneas, es decir, que debe impedirse un rearranque de forma segura por medio de dos vías completamente separadas entre sí. Estas dos vías que interrumpen la alimentación de energía al accionamiento con el
bloqueo seguro de impulsos, se denominan rutas de desconexión:
1. ruta de desconexión:
Activación de etapa de salida a través de [X1] (bloqueo de señales PWM; los excitadores de IGBT no se activan ya con patrones de impulsos).
2. ruta de desconexión:
Interrupción de la alimentación de los seis IGBT de etapas de salida a través de [X3] con ayuda de un relé (los excitadores de optoacopladores IGBT son desconectados de la alimentación con un relé, impidiendo de esta forma que las señales PWM lleguen a los IGBT).
Entre la activación del relé para la alimentación del excitador del paso de salida y la supervisión de la alimentación del excitador se realiza una verificación de plausibilidad en el microprocesador. Esta sirve, tanto para la detección de fallos del bloqueo de impulsos, como para la supresión del mensaje de error E 05-2 ("Subtensión de alimentación del excitador") que aparece durante el funcionamiento normal.
Contacto de recibo
sin potencial:
Además, la conmutación integrada para la "Safe Torque Off"
dispone de un contacto de acuse de recibo sin potencial ([X3], pines 5 y 6) para la disponibilidad de la alimentación del excitador. Este contacto se ha ejecutado como contacto normalmente cerrado. Este debe guiarse, p. ej., a la unidad de control de nivel superior. Mediante el PLC se debe controlar regularmente el funcionamiento de la desconexión de la habilitación del paso de salida (p. ej. mensualmente; contacto abierto = alimentación del excitador disponible).
Si se produce un fallo durante la verificación de plausibilidad, hay que impedir otro funcionamiento desde una punto de vista técnico de control, p. ej. mediante la desconexión de la tensión del circuito intermedio o la supresión de la habilitación del paso de salida
desde el PLC.

5. Técnica funcional de seguridad
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 59
5.2.8 Activación segura del freno de retención
Si se activa la "Parada segura", se conmuta el freno de retención sin corriente por dos
líneas (freno fijo); (véase el diagrama de bloques).
1. canal El freno de retención se controla con el DIN5 (habilitación del regulador) durante el funcionamiento (véase el diagrama de temporización cap. 1.2.2). La 1ª ruta de desconexión de la "habilitación de la etapa de salida" actúa sobre el microprocesador en el excitador del freno y conmuta el freno de retención sin corriente (freno fijo).
2. canal La 2ª ruta de desconexión de la "activación del relé de la alimentación del excitador" actúa directamente sobre un MOSFET que desactiva el freno de retención (freno fijo).
Precaución
El usuario es responsable del dimensionamiento y de la función segura del freno de retención. El funcionamiento del freno debe garantizarse mediante una prueba de frenado apropiada.
5.3 SS1, Safe Stop 1
5.3.1 Explicación
Con la función "Safe Stop 1" (SS1) se desconecta el accionamiento de forma regulada y después se desconecta la alimentación de la etapa final de potencia. De este modo, cuando se encuentra en parada, el accionamiento no puede generar ningún par de giro ni fuerza y por lo tanto ningún movimiento peligroso.

5. Técnica funcional de seguridad
60 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
5.3.2 Diagrama de temporización SS1
t
1
t
2
t
3
t
5
t
6
t
7
t
8
t1
0
t1
1
t1
2
t1
3
t
9
t
4
t
t
t
t
t
t
t
t
t
Triggering of pulse amplifier supply relay (optocoupler driver)
X3.2 (24V)
X3.2 (0V)
Supply of pulse amplifiers (optocoupler driver)
“ON“ (15V)
“OFF”
Floating feedback contact for driver supply
(X3.5/6)open
closed
Output stage enabling (X1, DIN4)“ON”
Timing of output
stage enabling
variable
Controller enabling (X1, DIN5)
Holding brake control (X6.1/2)Released
(24V)
Fixed
(0V)
Internal output stage enabling
(controlled by µP)
Set speed "n"
n=0
n
“H”
“H
”
“H”
Seven-segment
display
Delay until brake is
released!
Delay until brake is
applied!
Timing of "safe stop"
activation variable.
To be determined by user,
e.g. by means of safety
switching devices, depending
on application.
2. shut-down path
1. shut-down path
Discharge curve of
electrolytic capacitors for the
supply of the pulse amplifiers
"safe stop""safe stop"
“OFF”
“ON”
“OFF”
Can be set via FCT
Both ramps ca be set
separately via FCT
tv = t(PNOZ XV2p)
Figura 5.5 Diagrama de temporización para la función de seguridad SS1
El retardo de desconexión tv se activa en cuanto el controlador de motor detecta una parada.

5. Técnica funcional de seguridad
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 61
5.3.3 Descripción del diagrama de temporización
Este diagrama de temporización se ha elaborado en el ejemplo de la regulación del número de revoluciones, teniendo en cuenta la habilitación del regulador DIN 5 en [X1].
Para aplicaciones con buses de campo, la habilitación de reguladores se controla adicionalmente a través del bus de campo correspondiente. Dependiendo de la aplicación, también se puede parametrizar el modo de funcionamiento por medio del software de parametrización.
Estado de salida: - La alimentación de 24 V está conectada y el circuito intermedio está cargado.
- El servocontrolador se encuentra en "Parada segura". Este estado se visualiza con una "H" intermitente en el visualizador de siete segmentos.
Para conmutar de nuevo al estado activo la etapa de salida del servocontrolador y con ello accionar el motor conectado, hay que seguir los siguientes pasos:
1. La activación del relé para la conmutación de la tensión de alimentación de los excitadores de etapas de salida (2ª ruta de desconexión) se realiza hasta el momento t1 a través de [X3] con 24 V entre los pines 2 y 3.
2. Se carga la alimentación del excitador.
3. El contacto de acuse de recibo sin potencial ([X3], pines 5 y 6) para la verificación de plausibilidad entre la activación del relé para la alimentación del excitador se abre al cabo de un máx. de 20 ms tras t1 (t2-t1) y se desconecta la alimentación del excitador.
4. Aprox. 10 ms después de la apertura del contacto de recibo, se apaga la "H" en el visualizador en el momento t3.
5. El momento de habilitación de la etapa de salida ([X1], DIN4) se puede seleccionar libremente (t4-t1) en gran medida. La habilitación puede realizarse al mismo tiempo que la activación del relé del excitador, aunque deben transcurrir aprox. 10 µs (t5-t4) delante del flanco ascendente de la habilitación del regulador ([X1], DIN5), dependiendo de la aplicación.
6. Con el flanco ascendente de habilitación del regulador al momento t5 se provoca la liberación del freno de sostenimiento del motor (si lo hay), produciéndose la habilitación interna del paso de salida. La liberación del freno sólo es posible si se da la activación del relé para la conmutación de la alimentación del excitador, pues con ello se activa un MOSFET que se encuentra en el circuito de corriente del freno de sostenimiento. Mediante el software de parametrización se puede ajustar un tiempo de
retardo del inicio del desplazamiento (t6 – t5) que provoca que el accionamiento sea regulado durante el tiempo especificado con la velocidad "0" y que sólo se inicie con la velocidad ajustada una vez transcurrido dicho tiempo hasta el momento t6. Este tiempo de retardo del inicio del desplazamiento se ajuste de forma que el freno de sostenimiento existente se libere de forma segura antes de que se inicie el movimiento de giro. Para motores sin freno de sostenimiento, este tiempo se puede poner a 0.
7. En el momento t7 el accionamiento ha alcanzado la velocidad ajustada. Los ajustes de rampa necesarios se pueden parametrizar por medio del software de parametrización FCT.

5. Técnica funcional de seguridad
62 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
5.3.4 Activación de "Safe Stop 1"
Los siguientes pasos muestran cómo se puede conducir un accionamiento que esté
girando al estado "Parada segura":
1. Antes de que se active "Safe Torque Off" (es decir, el relé para alimentación del excitador "OFF" y habilitación de la etapa de salida "OFF" y ambas rutas de desconexión bloquean las señales PWM), el accionamiento debe pararse mediante la supresión de la habilitación del regulador. La rampa de frenado (t9–t8) se puede ajustar por medio del software de parametrización en función de la aplicación ("Deceleración de parada de emergencia").
2. Tras alcanzarse el número de revoluciones 0, el accionamiento aún es regulado para un tiempo de retardo residual parametrizable (t10–t9) con este valor nominal. En el caso de este tiempo ajustable se trata del retardo con el que el freno de sostenimiento del motor se opone al movimiento. Este tiempo depende del correspondiente freno de sostenimiento y puede ser parametrizado por el usuario. En aplicaciones sin freno de sostenimiento, este tiempo se puede poner a 0.
3. Una vez transcurrido dicho tiempo, se suprime la habilitación interna de la etapa de salida del microprocesador (t10).
El freno de sostenimiento se opone al movimiento en cualquier caso, cuando el "tiempo de la rampa de frenado + tiempo de retardo de desconexión ajustado" ha transcurrido, incluso cuando el accionamiento no se haya podido detener hasta entonces.
4. A partir del momento t10, se puede activar la "Safe Torque Off" (activación del relé de alimentación del excitador y desconexión simultánea de la habilitación de la etapa final). El tiempo (t11–10) depende de la aplicación y puede ser definido por el usuario.
5. Al suprimirse la señal de activación del relé para la desconexión de la alimentación del excitador (t11), se produce la descarga de los condensadores en este ramal de tensión. Aprox. 80 ms (t12-t11) tras la supresión de la señal de activación del relé para la desconexión de la alimentación del excitador, se cierra el contacto de acuse de
recibo ([X3], pines 5 y 6).
En el momento t13 se produce la indicación de "H" para visualizar la "Parada segura" en el visualizador de siete segmentos del servocontrolador. Esto sucede por lo menos 30 ms tras el cierre del contacto de acuse de recibo sin potencial (t13–t12).
5.3.5 Ajuste del retardo de desconexión
El retardo de desconexión del freno de sostenimiento debe ajustarse en el FCT. El tiempo ajustado es necesario ya que el freno, por razones de mecánica, no se cierra inmediatamente. Si el tiempo está ajustado con un valor = 0 o <= 10 ms puede suceder que las cargas en suspensión vertical se deslicen durante un breve tiempo.

5. Técnica funcional de seguridad
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 63
5.3.6 Ejemplo de parametrización FCT
Figura 5.6 Ejemplo de parametrización

5. Técnica funcional de seguridad
64 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
5.3.7 Ejemplo de conexión de circuito CMMP-AS SS1
Figura 5.7 Esquema del circuito de función de seguridad SS1 con CMMP-AS

5. Técnica funcional de seguridad
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 65
5.3.8 Explicaciones del ejemplo de circuito
El ejemplo de conexión de circuito muestra una combinación del CMMP-AS con un dispositivo de conmutación de seguridad PILZ PNOZ XV2P. Como dispositivo de
conmutación se ha dibujado una parada de emergencia en combinación con una puerta de protección. En total es posible conectar en serie tres elementos de conexión. Además, cabe la posibilidad de usar un interruptor de posición de puerta que mantiene cerrada la puerta de protección, hasta que el accionamiento se para o hasta que la señal "Acuse de recibo de la alimentación del excitador" indica un estado seguro y la verificación de plausibilidad concluye satisfactoriamente.
Las especificaciones técnicas, tales como la corriente máxima etc. se encuentran en la hoja de datos de los dispositivos de conmutación de seguridad.
5.3.9 Requerimiento de PARADA DE EMERGENCIA, control de puertas de protección
Tras accionar el pulsador de parada de emergencia o abrir las puertas de protección, el contacto normalmente abierto de K1 (13, 14) se abre inmediatamente. Como consecuencia se cancela inmediatamente la habilitación del regulador. Esto inicia la función de rampa del regulador. El regulador frena con la deceleración Quick Stop ajustada. Tras alcanzarse el número de revoluciones 0, el accionamiento aún es regulado para un tiempo de retardo
de desconexión parametrizable (ty) con este valor nominal. En el caso de este tiempo ajustable se trata del retardo con el que el freno de sostenimiento del motor se opone al movimiento. Este tiempo depende del correspondiente freno de sostenimiento y puede ser parametrizado por el usuario. En aplicaciones sin freno de sostenimiento, este tiempo se puede poner a 0.
Una vez transcurrido dicho tiempo, se suprime la habilitación interna de la etapa final del microprocesador.
Cuando ha finalizado el tiempo de retardo del PNOZ, se abren los dos contactos de retardo de K1 (37, 38 y 47, 48). Entonces se desconectan simultáneamente la activación del relé de la alimentación del excitador y la habilitación de la etapa final.
Importante
La función de rampa de la deceleración Quick Stop del controlador del motor no se controla.
Es responsabilidad del explotador evitar la apertura involuntaria de las puertas de protección.
Si se utiliza el PILZ PNOZ XV2P es posible un funcionamiento por dos canales con detección de circuitos cruzados. Esto permite detectar conexiones a tierra en el circuito inicial y de entrada, cortocircuitos en el circuito de entrada / inicial, circuitos cruzados en el circuito de entrada.

5. Técnica funcional de seguridad
66 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Advertencia
El freno de sostenimiento del motor suministrado de serie o un freno externo de sostenimiento de motor controlado por el dispositivo de regulación del accionamiento no son adecuados para la protección de personas.
Asegurar adicionalmente los ejes verticales para evitar que se caigan o desprendan una vez desconectado el motor, ya sea mediante: - un bloqueo mecánico de los ejes verticales, - un dispositivo externo de frenado/retención/sujeción, o - un contrapeso suficiente de los ejes.
Importante
Si se solicita la PARADA DE EMERGENCIA, si el freno externo es necesario éste debe conectarse inmediatamente.
Importante
El freno de sostenimiento del EMMS-AS-…-RSB/-RMB no es apropiado para frenar el motor y no representa ninguna función de seguridad.
Importante
El tiempo de retardo del relé del PNOZ debe se adaptado en función de la aplicación (véase 1.3.11). Si el tiempo de retardo ajustado es demasiado corto, una vez transcurrido este tiempo el accionamiento realiza una función STO y el freno se desgasta.
5.3.10 Restablecimiento del funcionamiento normal
Antes de una nueva conexión es preciso asegurarse de que se han eliminado todos los riesgos y de que la instalación se puede volver a poner en marcha de forma segura. Si existen zonas accesibles, debe realizarse manualmente una validación mediante el pulsador S2.
5.3.11 Comprobación de la función de seguridad
El dispositivo PILZ PNOZ XV2P comprueba en cada ciclo On/Off de la máquina si los relés
del dispositivo de seguridad abren y cierran correctamente. Mediante el PLC se debe controlar regularmente el funcionamiento de la desconexión de la habilitación del paso de salida y de la habilitación del regulador (p. ej. mensualmente) Además es necesario supervisar la señal "Retroseñal de la alimentación del excitador" y comprobar su plausibilidad.

5. Técnica funcional de seguridad
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 67
5.3.12 Determinación del tiempo de frenado
El tiempo de frenado se puede determinar fácilmente mediante la función FCT Trace.
A causa de cargas diferentes, el tiempo de frenado puede variar considerablemente. Determine los valores para el tiempo de frenado máximo.
Para ello deben realizarse los siguientes ajustes en el FCT en el punto "Configurar datos de medición".
Figura 5.8 Configuración de la máscara FCT de datos de medición.
En cuanto se acciona el botón se registran ambos valores de velocidad durante
2,55 s. Durante ese tiempo se suprime la habilitación del regulador para determinar el tiempo de frenado en la curva de medición. Ésta se encuentra en el punto "Datos de medición".

5. Técnica funcional de seguridad
68 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Una curva de medición típica podría tener el siguiente aspecto.
Tiempo de frenado leído gráficamente: 210 ms.
Figura 5.9 Curva de medición típica para la determinación del tiempo de frenado
5.3.13 Ajuste del tiempo de retardo
El tiempo de retardo del PILZ PNOZ XV2P puede ajustarse manualmente en el dispositivo.
Dicho tiempo debe ser mayor que el tiempo de frenado determinado. Si no es así, el accionamiento no frenará de forma definida, sino que se detendrá de forma descontrolada.

6. Instalación mecánica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 69
6. Instalación mecánica
6.1 Notas importantes
Importante
El servocontrolador de posición CMMP-AS-C20-11A-P3 solo se debe usar como aparato para ser montado en el armario
de maniobra. Posición de montaje vertical con las ranuras de conexión EXT1 y
EXT2 hacia arriba. Montar el servocontrolador de posición con la placa de fijación
en la placa del armario de maniobra. Espacios libres para el montaje:
Para que el aparato disponga de la ventilación suficiente, debe dejarse encima y debajo del aparato una distancia de 100 mm en cada lado con respecto a otros módulos.
Para un cableado óptimo del cable del motor o del transductor angular se recomienda dejar en la parte inferior del aparato un espacio libre para el montaje de 100 mm.
Los servocontroladores de posición de la serie CMMP-AS están
diseñados de forma que, si se utilizan conforme a su uso previsto y se instalan debidamente, se pueden conectar alineados directamente en una pared de montaje disipadora del calor. Se debe tener en cuenta que un calentamiento excesivo provocaría un envejecimiento prematuro y/o daños en el aparato. En caso de sobrecarga térmica elevada de los servocontroladores de posición CMMP-AS, se recomienda una distancia de separación en la fijación de 95 mm.
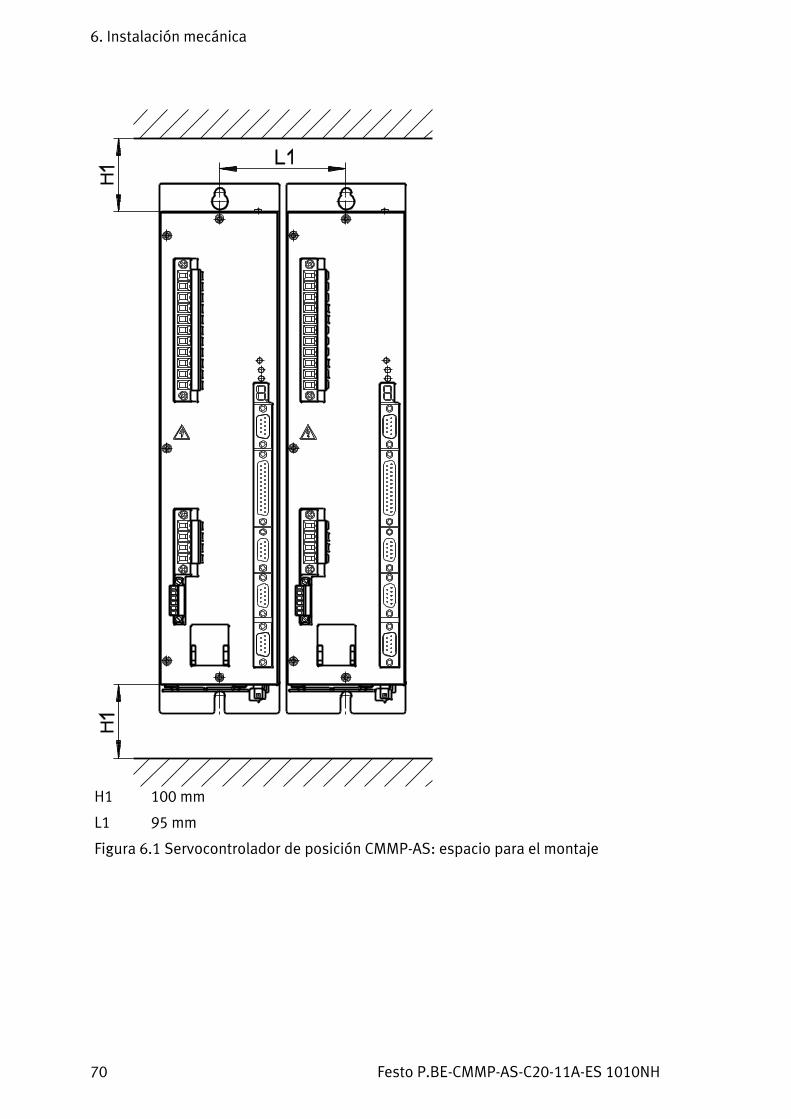
6. Instalación mecánica
70 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
H1 100 mm
L1 95 mm
Figura 6.1 Servocontrolador de posición CMMP-AS: espacio para el montaje

6. Instalación mecánica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 71
6.2 Vista del aparato
1 Pulsador de Reset
2 Bus conectado
3 Indicación del estado
4 [X5]: conexión para el
interface serie RS232
5 [X1]: comunicación de I/O
6 [X11]: salida de transmisor
incremental
7 [X10]: entrada de
transmisor incremental
8 [X4]: conexión para el
interface CANopen
9 [X6A]: conexión del motor
aJ [X6]: conexión del motor
aA LED Ready
aB [X9]: fuente de alimentación
Figura 6.2 Servocontrolador de posición CMMP-: vista frontal

6. Instalación mecánica
72 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
1 Huecos de unidades
enchufables EXT1 y EXT2 para los
módulos de tecnología
Figura 6.3 Servocontrolador de posición CMMP-AS-11A: vista superior
1 11

6. Instalación mecánica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 73
1 [X3]: toma de mando para
alimentación de excitador de relé (parada segura) y
alimentación de 24 V DC
2 [X2B]: conexión para el
encoder
3 [X2A]: conexión para el
resolver
Figura 6.4 Servocontrolador de posición CMMP-AS-11A: vista inferior
3
1
2

6. Instalación mecánica
74 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
6.2.1 Montaje
El servocontrolador de posición CMMP-AS posee tanto en la parte superior como en la inferior unas lengüetas de sujeción. Con ellas se fija en posición vertical el
servocontrolador de posición en la placa de montaje del armario de maniobra. Las lengüetas de sujeción forman parte del disipador de calor, por lo que se dispone del mejor paso de calor a la placa del armario de maniobra posible.
Para fijar el servocontrolador de posición CMMP-AS utilice tornillos del tamaño M6.
L1 = 369 mm L2 = 329 mm L3 = 12,5 mm L4 = 6 mm
B1 = 83 mm B2 = 41,5 mm D1 = 11 mm D2 = 7 mm
H1 = 263 mm
Figura 6.5 Servocontrolador de posición CMMP-AS: placa de montaje

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 75
7. Instalación eléctrica
7.1 Asignación de conectores enchufables
La conexión del servocontrolador de posición CMMP-AS a la tensión de alimentación, al motor, a la resistencia de frenado y al freno de retención se realiza según Figura 7.1.
Figura 7.1 Conexión a la tensión de alimentación y al motor

7. Instalación eléctrica
76 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Para el funcionamiento del servocontrolador de posición CMMP-AS, en primer lugar se necesita una fuente de alimentación de 24 V para la alimentación de la electrónica, la cual se conecta a los conectores [X3] 24 V y 0 V.
La conexión de la alimentación para la etapa final de potencia se realiza opcionalmente en los bornes L1, L2, L3 para la alimentación de AC o en los bornes ZK+ y ZK- para la alimentación de DC.
El motor se conecta con los bornes U, V y W. En los bornes +Mtdig y –Mtdig se conecta el termostato automático del motor (PTC o contacto normalmente cerrado), cuando este es guiado en un cable con las fases del motor. Si se usa un sensor térmico analógico (p. ej. KTY81) en el motor, la conexión se realiza por medio del cable del transmisor a [X2A] o a [X2B].
La conexión del encoder por medio del conector D-Sub a [X2A] / [X2B] se ha representado de forma esquemática, grosso modo, en Figura 7.1.
El servocontrolador de posición CMMP-AS debe conectarse con su conexión PE a la tierra de servicio.
Primero se debe cablear por completo el servocontrolador de posición CMMP-AS. Entonces se pueden conectar las tensiones de funcionamiento para el circuito intermedio y la alimentación de la electrónica. En caso de invertirse la polaridad de las conexiones de la tensión de funcionamiento, de una tensión de funcionamiento demasiado alta o de haberse intercambiado las conexiones de la tensión de funcionamiento y del motor, el
servocontrolador de posición CMMP-AS puede sufrir daños.
La longitud máxima de los cables de señal no debe exceder los 30 m.
7.2 Sistema completo del CMMP-AS
En Figura 7.2 se ha representado el sistema completo de un servocontrolador de posición CMMP-AS. Para el funcionamiento del servocontrolador de posición son precisos los componentes siguientes:
Componentes - Interruptor general de red
- Interruptor de protección FI (RCD) universal de 300 mA
- Fusible automático
- Alimentación de tensión de 24 V DC
- Servocontrolador de posición CMMP-AS
- Motor con cable del motor
Para la parametrización se necesita un PC con cable de conexión serie.
En el cable de la alimentación hay que colocar un fusible automático trifásico de 25 A con característica de acción lenta (B25).

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 77
1 Interruptor
principal
2 Fusible
automático
3 Fuente de
alimentación 24 V DC
4 Resistencia
externa de frenado
5 PC
6 Motor EMMS-AS
con codificador
7 CMMP-AS
Figura 7.2 Estructura completa del CMMP-AS con Motor y PC
1
2
3
4
5
6
7

7. Instalación eléctrica
78 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.3 Conexión: Fuente de alimentación [X9]
La alimentación de corriente de 24 V DC se realiza a través de [X3].
La fuente de alimentación de red será trifásica. Como alternativa a la alimentación de AC o con el fin del acoplamiento del circuito intermedio, es posible una alimentación directa de DC para el circuito intermedio.
7.3.1 Ejecución en el aparato [X9]
- PHOENIX Power-Combicon de 11 pines, PC 4/11-G-7,62-bk
7.3.2 Contraclavija [X9]
- PHOENIX Power-Combicon de 11 pines, PC 4 HV/11-ST-7,62-bk
7.3.3 Asignación de clavijas [X9]
Pin nº Denominación Valor Especificación
1 L1 3 x 230 ... 480 V AC [±10 %]
50 ... 60 Hz [±10 %]
Fase 1 de red
2 L2 Fase 2 de red
3 L3 Fase 3 de red
4 PE - Conexión de conductor protector de la red
5 ZK+ < 700 V DC Alimentación alternativa: tensión positiva de
circuito intermedio 6
7 ZK- < 700 V DC Alimentación alternativa: tensión negativa de
circuito intermedio 8
9 BR-EXT < 800 V DC Conexión de la resistencia de frenado externa
10 BR-CH < 800 V DC Conexión de chopper de frenado para
- resistencia de frenado interna frente a BR-INT
- resistencia de frenado externa frente a BR-EXT
11 BR-INT < 800 V DC Conexión de la resistencia de frenado interna
(puente a BR-CH si se usa la resistencia interna)
Tabla 7.1 Asignación de clavijas [X9]

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 79
Si no se emplea ninguna resistencia de frenado externa, hay que conectar un puente entre PIN10 y PIN11 para que la descarga rápida del circuito intermedio esté operativa.
Para obtener mayores potencias de frenado, hay que conectar una resistencia de frenado externa [X9].
7.4 Conexión: Motor [X6] y [X6A]
7.4.1 Ejecución en el servocontrolador de posición [X6]
- PHOENIX Power-Combicon de 4 pines, PC 4/4-G-7,62-bk
7.4.2 Ejecución en el servocontrolador de posición [X6A]
- PHOENIX Mini-Combicon de 6 pines, MC 1,5/6-STF-3,81-bk
7.4.3 Contraclavija [X6]
- PHOENIX Power-Combicon de 4 pines, PC 4 HV/4-STF-7,62-bk
- Codificación en PIN1 (BR-)
7.4.4 Contraclavija [X6A]
- PHOENIX Mini-Combicon de 6 pines, MC 1,5/6-GF-3,81-bk
7.4.5 Asignación de clavijas [X6]
Pin nº Denominación
Valor Especificación
1 U 0 ... 360 Vef
0 ... 20 Aef
0 ... 1.000 Hz
Conexión de las tres fases del motor
(con 3ª onda armónica) 2 V
3 W
4 PE – Conexión del cable PE del motor
Tabla 7.2 Asignación de clavijas [X6] Conexión: Motor

7. Instalación eléctrica
80 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.4.6 Asignación de clavijas [X6A]
Pin nº Denominación
Valor Especificación
1 MT+ +5 V / 5 mA Sensor térmico, temperatura del motor: contacto
normalmente cerrado, normalmente abierto, PTC 2 MT- GND
3 PE – Apantallamiento se la supervisión de la temperatura
del motor
4 PE – Apantallamiento del freno de sostenimiento del motor
5 BR+ 24 V freno, máx. 2 A Freno de sostenimiento (motor), nivel de señal en
función del estado de conmutación, interruptor
High-Side / Low-Side 6 BR- 0 V Freno
Tabla 7.3 Asignación de clavijas [X6A] Conexión: Supervisión de la temperatura del motor y freno de sostenimiento
El apantallamiento del cable del motor debe colocarse adicionalmente en plano en el cuerpo del controlador con el borne de apantallamiento SK14.
7.4.7 Indicaciones de conexión
A través de los bornes ZK+ y ZK- se pueden conectar los circuitos intermedios de varios servocontroladores de posición CMMP-AS. El acoplamiento de los circuitos intermedios es interesante en aplicaciones en las que hay implicadas unas elevadas energías de frenado o en las que en caso de fallo de la fuente de alimentación aún deban ejecutarse movimientos.
A los bornes BR+ y BR- se puede conectar un freno de sostenimiento del motor. El freno de estacionamiento es alimentado por la alimentación de corriente del servocontrolador de posición. Hay que observar la corriente de salida máxima facilitada por el servocontrolador de posición CMMP-AS.
Para soltar el freno de sostenimiento debe asegurarse que se respetan las tolerancias de tensión en los bornes de conexión del freno de sostenimiento.
Observar para ello las indicaciones de la Tabla A.7.
En caso necesario, hay que conmutar un relé entre el aparato y el freno de estacionamiento, tal como se representa en la Figura 7.3:

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 81
Br+
Br-
ARS 2100
Motor
+24 V power supply
GND power supply
+24 V brake
GND brakefree-wheeling diode
Resistor andcapacitor for spark extinguishing
CMMP-AS
Figura 7.3 Conexión de un freno de estacionamiento con elevado consumo de corriente (> 2 A) al aparato
Al conmutar corrientes continuas inductivas a través del relé se generan fuertes corrientes con formación de chispas. Para el desparasitaje recomendamos el uso de unidades para eliminación de perturbaciones integradas, p. ej. de la empresa Evox RIFA, denominación: PMR205AC6470M022 (elemento RC con 22 Ω en serie, con 0,47 uF).

7. Instalación eléctrica
82 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.5 Conexión: Comunicación de I/O [X1]
El capítulo 7.5.5 muestra la función general de las entradas y salidas digitales y
analógicas. En el lado derecho se ha representado el servocontrolador de posición CMMP-AS, y a la izquierda la conexión del sistema de mando. También se puede ver la ejecución del cable.
En el servocontrolador de posición CMMP-AS se distinguen dos rangos de potencial:
Entradas y salidas analógicas:
Todas las entradas y salidas analógicas se refieren al AGND. El AGND está conectado internamente con el GND, y el potencial de referencia para la parte de mando con el C y los convertidores
analógico-digitales del servocontrolador de posición. Este rango de potencial está aislado galvánicamente del rango de 24 V y del circuito intermedio.
Entradas y salidas de 24 V:
Estas señales se refieren a la tensión de alimentación de 24 V del servocontrolador de posición CMMP-AS suministrada a través de [X3] y separada del potencial de referencia de la parte de mando por optoacopladores.
El servocontrolador de posición CMMP-AS dispone de una entrada analógica diferencial (AIN0) y dos entradas analógicas de un solo extremo, dimensionadas para las tensiones de entrada en el rango de 10 V. Las entradas AIN0 y #AIN0 son guiadas al sistema de mando
a través de cables trenzados (ejecución tipo Twisted-pair). Si el sistema de mando posee salidas single-ended, la salida se conecta con AIN0 y #AIN0 se dispone en el potencial de referencia del sistema de mando. Si el sistema de mando dispone de salidas diferenciales, entonces estas deben conmutarse 1:1 en las entradas diferenciales del servocontrolador de posición CMMP-AS.
El potencial de referencia AGND se conecta al potencial de referencia del sistema de mando. Esto es necesario para que la entrada diferencial del servocontrolador de posición CMMP-AS no pueda verse sobreexcitado por unas elevadas "interferencias en modo común".
Hay disponibles dos salidas analógicas de supervisión con tensiones de salida en el rango de 10 V y una salida para una tensión de referencia de +10 V. Estas salidas se pueden
guiar a la unidad de control de nivel superior, debiendo transmitirse el potencial de referencia AGND. Si el sistema de mando dispone de entradas diferenciales, la entrada "+" de la unidad de mando debe ser conectada a la salida del servocontrolador de posición CMMP-AS y la entrada "-" del sistema de mando al AGND.
7.5.1 Ejecución en el aparato [X1]
- Conector D-SUB, 25 contactos, casquillo
7.5.2 Contraclavija [X1]
- Conector D-SUB, 25 contactos, clavija
- Cuerpo de conector D-SUB de 25 contactos con tornillos de bloqueo 4/40 UNC

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 83
7.5.3 Asignación de clavijas [X1]
Pin nº Denominación Valor Especificación
1 AGND 0 V Apantallamiento para señales analógicas, AGND
14 AGND 0 V Potencial de referencia para señales analógicas
2 AIN0 UON = 10 V
RI 30 kΩ
Entrada de valor nominal 0, diferencial,
tensión de entrada máxima 30 V 15 #AIN0
3 AIN1 UON = 10 V
RI 30 kΩ
Entradas de valor nominal 1 y 2, de un solo
extremo, tensión de entrada máx. 30 V 16 AIN2
4 +VREF +10 V Salida de referencia para potenciómetro de valor
nominal
17 AMON0 10 V Monitor analógico 0
5 AMON1 10 V Monitor analógico 1
18 +24V 24V / 100 mA Alimentación de 24 V conducida
6 GND24 GND Potencial de referencia para I/O digitales
19 DIN0 POS Bit0 Selección de destino de posicionamiento Bit0
7 DIN1 POS Bit1 Selección de destino de posicionamiento Bit1
20 DIN2 POS Bit2 Selección de destino de posicionamiento Bit2
8 DIN3 POS Bit3 Selección de destino de posicionamiento Bit3
21 DIN4 FG_E Entrada de habilitación de paso de salida
9 DIN5 FG_R Entrada de habilitación de regulador
22 DIN6 END0 Entrada de detector de final de carrera 0
(cerrado n > 0)
10 DIN7 END1 Entrada de detector de final de carrera 1
(cerrado n < 0)
23 DIN8 START Entrada para inicio de posicionamiento
11 DIN9 SAMP Entrada de alta velocidad
24 DOUT0 / LISTO 24V / 100 mA Salida de disponibilidad para funcionar
12 DOUT1 24V / 100 mA Salida libremente programable
25 DOUT2 24V / 100 mA Salida libremente programable
13 DOUT3 24V / 100 mA Salida libremente programable
Tabla 7.4 Distribución de conectores: comunicación de I/O [X1]

7. Instalación eléctrica
84 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.5.4 Tipo y ejecución del cable [X1]
El capítulo 7.5.5 incluye una representación del cable [X1] entre el servocontrolador de
posición CMMP-AS y el sistema de mando. El cable representado incluye dos apantallados de cable.
El apantallado de cable externo se coloca en PE en ambos lados. En el servocontrolador de posición CMMP-AS el cuerpo del conector enchufable D-SUB está conectado a PE. Si se emplea un cuerpo de conector D-Sub metálico, el apantallado del cable se conecta de forma simple bajo el alivio de tracción.
Generalmente suele bastar con un guiado de cable sin apantallamiento para las señales de 24 V. En entornos con fuertes perturbaciones y con longitudes de cable mayores (l > 2 m) entre el sistema de mando y el servocontrolador de posición CMMP-AS, se deben utilizar cables de mando apantallados.
La longitud máxima de los cables de señal no debe exceder los 30 m.
A pesar de la diferente ejecución de las entradas analógicas en el servocontrolador de posición CMMP-AS, no es recomendable un guiado sin apantallado de las señales
analógicas, ya que pueden llegar elevadas amplitudes a los convertidores a través de los contactores conmutados o incluso de las perturbaciones de la etapa final. Estas se acoplan a las señales analógicas, causan interferencias en modo común las cuales, como resultado, pueden causar divergencias de los valores analógicos de medición.
En caso de una longitud del cable limitado (l < 2 m, cableado en el armario de maniobra), es suficiente el apantallado externo PE en ambos lados para garantizar el funcionamiento libre de perturbaciones.
Para la mejor supresión de perturbaciones posible en las señales analógicas, hay que apantallar conjuntamente por separado los hilos conductores de las señales analógicas. Este apantallado interior del cable se dispone únicamente en el servocontrolador de posición CMMP-AS en AGND (pines 1 o 14). Este se puede disponer en ambos lados para establecer una conexión de los potenciales de referencia del sistema de mando y del servocontrolador de posición CMMP-AS. Los pines 1 y 14 están directamente conectados entre sí en el regulador.
7.5.5 Indicaciones de conexión [X1]
Las entradas digitales se han concebido para tensiones de mando de 24 V. Debido al elevado nivel de señal, ya queda garantizada una gran resistencia a las interferencias de estas entradas. El servocontrolador de posición CMMP-AS facilita una tensión auxiliar de 24 V que puede cargarse como máximo con 100mA. De este modo se pueden activar directamente las entradas por medio de interruptores. Por supuesto, también es posible la activación de un PLC por medio de salidas de 24 V.

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 85
Las salidas digitales se han ejecutado como el denominado "Interruptor High-Side". Ello quiere decir que los 24 V del servocontrolador de posición CMMP-AS se puede conectar como activo en la salida. Las cargas tales como lámparas, relés, etc., son conmutados pues desde la salida hacia GND24. Las cuatro salidas DOUT0 a DOUT3 admiten una carga
máxima admisible de 100 mA por salida. Igualmente se pueden guiar las salidas directamente a las entradas de 24 V de un PLC.

7. Instalación eléctrica
86 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
24
11
19
6
18
14
1
5
14
17
4
16
3
15
2
13DOUT3
DIN9
DOUT0
DIN0
GND24
+24VDC
+VREF
AMON0
AIN1
AIN0
Pin No.X1
AMON1
AIN2
#AIN0
AGND
AGND
DOUTx
GND24
+24VDC
+24VDC
GND
GND24
PEPE
100 mAmax !
100 mAmax !
Connector
housing
+VREF
AIN0
#AIN0
AGND
AIN1 / AIN2
AGND
+15V
AGND
AGND
AMONx
AGND
GND AGND
DINx
GND24
GND
Control system CMMP-AS
Figura 7.4 Esquema eléctrico de base de conexión [X1]

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 87
7.6 Conexión: STO y SS1
Las funciones de las funciones de seguridad se describen en el capítulo 5.
7.6.1 Ejecución en el aparato [X3]
- PHOENIX Mini-Combicon MC 1,5/6-STF-3,81-bk
7.6.2 Contraclavija [X3]
- PHOENIX Mini-Combicon MC 1,5/ 6-GF-3,81-bk
7.6.3 Asignación de clavijas [X3]
Pin nº Denominación Valor Especificación
1 24 V 24 V DC / 2,8 A Alimentación de 24 V DC para la parte de mando (0,8 A) y freno de
sostenimiento (2 A) (sin técnica de seguridad según categoría 3:
puente entre pin 1 y 2)
2 REL 0V / 24V DC Activación y desactivación del relé para interrumpir la
alimentación del excitador
3 0 V GND 24 V DC Potencial de referencia para la alimentación de 24 V DC y para el
PLC
4 - - No ocupado
5 NC1 Máx. 25 V AC /
60 V DC / 2 A
Contacto de recibo sin potencial para alimentación del excitador,
contacto normalmente cerrado 6 NC2
Tabla 7.5 Asignación de clavijas [X3]

7. Instalación eléctrica
88 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.7 Conexión: Resolver [X2A]
7.7.1 Ejecución en el aparato [X2A]
- Conector D-SUB, 9 contactos, casquillo
7.7.2 Contraclavija [X2A]
- Conector D-SUB, 9 contactos, clavija
- Cuerpo de conector D-SUB de 9 contactos con tornillos de bloqueo 4/40 UNC
7.7.3 Asignación de clavijas [X2A]
Pin nº Denominación Valor Especificación
1 S2 3,5 Vef /5-10 kHz
Ri > 5 k
Señal de pista SENO, diferencial
6 S4
2 S1 3,5 Vef /5-10 kHz
Ri > 5 k
Señal de pista COSENO, diferencial
7 S3
3 AGND 0 V Apantallamiento para pares de señales
(apantallado interior)
8 MT- GND Potencial de referencia de sensor térmico
4 R1 7 Vef /5-10 kHz
IA 150 mAef
Señal de portadora para Resolver
9 R2 GND
5 MT+ +3,3 V / Ri=2 k Sensor térmico del motor, contacto cerrado en reposo,
contacto abierto en reposo, PTC, KTY...
Tabla 7.6 Asignación de clavijas [X2A]
- El apantallamiento exterior debe estar siempre tendido en el regulador en PE (cuerpo del conector)
- Los apantallamientos internos deben tenderse únicamente en el servocontrolador de posición CMMP-AS en el PIN3 de [X2A].

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 89
7.8 Conexión: Encoder [X2B]
7.8.1 Ejecución en el aparato [X2B]
- Conector D-SUB, 15 contactos, casquillo
7.8.2 Contraclavija [X2B]
- Conector D-SUB, 15 contactos, clavija
- Cuerpo de conector D-SUB de 15 contactos con tornillos de bloqueo 4/40 UNC
7.8.3 Asignación de clavijas del transmisor analógico [X2B]
Pin nº Denominación Valor Especificación
1 MT+ +3,3 V / Ri=2 k Sensor de temperatura del motor, contacto cerrado en
reposo, PTC
9 U_SENS+ 5 V ... 12 V /
RI 1 k
Cables del sensor para la alimentación del transmisor
2 U_SENS-
10 US 5 V / 12 V/ 10 %
Imáx. = 300 mA
Tensión de funcionamiento para transmisores
incrementales de alta resolución
3 GND 0 V Potencial de referencia de alimentación del transmisor y
del sensor de temperatura del motor
11 R 0,2 VSS
... 0,8 VSS
RI 120 Ω
Señal de pista de impulso de puesta a cero (diferencial)
del transmisor incremental de alta resolución 4 #R
12 COS_Z1*) 1 VSS / 10 % RI 120
Señal de conmutación COSENO (diferencial) del
transmisor incremental de alta resolución 5 #COS_Z1*)
13 SIN_Z1*) 1 VSS / 10 % R
I 120
Señal de conmutación SENO (diferencial)
del transmisor incremental de alta resolución 6 #SIN_Z1*)
14 COS_Z0 *) 1 VSS
±10 %
RI 120 Ω
Señal de pista COSENO (diferencial) del transmisor
incremental de alta resolución 7 #COS_Z0 *)
15 SIN_Z0 *) 1 VSS
±10 %
RI 120 Ω
Señal de pista SENO (diferencial) del transmisor
incremental de alta resolución 8 #SIN_Z0 *)
*) Transmisor Heidenhain: A=SIN_Z0; B=COS_Z0, C=SIN_Z1, D=COS_Z1
Tabla 7.7 Distribución de conectores: Transmisor incremental analógico

7. Instalación eléctrica
90 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.8.4 Asignación de clavijas encoder con interface serie (p. ej. EnDat, HIPERFACE) [X2B]
Pin nº Denominación Valor Especificación
1 MT+ +3,3 V / Ri=2 k Sensor de temperatura del motor, contacto cerrado en
reposo, PTC
9 U_SENS+ 5 V ... 12 V /
RI 1 k
Cables del sensor para la alimentación del transmisor
2 U_SENS-
10 US 5 V / 12 V/ 10 %
Imáx. = 300 mA
Tensión de funcionamiento para transmisores
incrementales de alta resolución
3 GND 0 V Potencial de referencia de alimentación del
transmisor y del sensor de temperatura del motor
11
4
12 DATA 5 VSS RI 120
Cable de datos bidireccional RS485 (diferencial) (EnDat,
HIPERFACE) 5 #DATA
13 SCLK 5 VSS R
I 120
Salida de sincronización RS485 (diferencial) (EnDat)
6 #SCLK
14 COS_Z0 *) 1 VSS
±10 %
RI 120 Ω
Señal de pista COSENO (diferencial) del transmisor
incremental de alta resolución 7 #COS_Z0 *)
15 SIN_Z0 *) 1 VSS
±10 %
RI 120 Ω
Señal de pista SENO (diferencial) del transmisor
incremental de alta resolución 8 #SIN_Z0 *)
*) Transmisor Heidenhain: A=SIN_Z0; B=COS_Z0
Tabla 7.8 Distribución de conectores: Transmisor incremental con interface serial, p. ej. EnDat

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 91
7.8.5 Asignación de clavijas del transmisor digital [X2B]
Pin nº Denominación Valor Especificación
1 MT+ +3,3 V / Ri=2 k Sensor de temperatura del motor, contacto cerrado en
reposo, PTC
9 U_SENS+ 5 V ... 12 V /
RI 1 k
Cables del sensor para la alimentación del transmisor
2 U_SENS-
10 US 5 V / 12 V/ 10 %
Imáx. = 300 mA
Tensión de funcionamiento para transmisores
incrementales de alta resolución
3 GND 0 V Potencial de referencia de alimentación del
transmisor y del sensor de temperatura del motor
11 N 2 VSS
... 5 VSS
RI 120 Ω
Impulso de puesta a cero RS422 (diferencial) del
transmisor incremental digital 4 #N
12 H_U 0 V / 5 V RI 2 k
en VCC
Fase U sensor Hall para conmutación
5 H_V Fase V sensor Hall para conmutación
13 H_W Fase W sensor Hall para conmutación
6
14 O 2 VSS
... 5 VSS
RI 120 Ω
A señal de pista RS422 (diferencial) del transmisor
incremental digital 7 #A
15 B 2 VSS
... 5 VSS
RI 120 Ω
B señal de pista RS422 (diferencial) del transmisor
incremental digital 8 #B
Tabla 7.9 Distribución de conectores: transmisor incremental digital
- El apantallamiento exterior debe estar siempre tendido en el regulador en PE (cuerpo del conector)

7. Instalación eléctrica
92 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.9 Conexión: entrada de transmisor incremental [X10]
7.9.1 Ejecución en el aparato [X10]
- Conector D-SUB, 9 contactos, casquillo
7.9.2 Contraclavija [X10]
- Conector D-SUB, 9 contactos, clavija
- Cuerpo de conector D-SUB de 9 contactos con tornillo de bloqueo 4/40 UNC
7.9.3 Asignación de clavijas [X10]
Pin nº Denominación Valor Especificación
1 A / CLK 5 V / RI 120 Señal de transmisor incremental A /
señal de motor paso a paso CLK
polaridad pos. según RS422
6 A# / CLK# 5 V / RI 120 Señal de transmisor incremental A /
señal de motor paso a paso CLK
polaridad neg. según RS422
2 B / DIR 5 V / RI 120 Señal de transmisor incremental B /
señal de motor paso a paso DIR
polaridad pos. según RS422
7 B# / DIR# 5 V / RI 120 Señal de transmisor incremental B /
señal de motor paso a paso DIR
polaridad neg. según RS422
3 N 5 V / RI 120 Impulso de puesta a cero de transmisor
incremental N
polaridad pos. según RS422
8 N# 5 V / RI 120 Impulso de puesta a cero de transmisor
incremental N
polaridad neg. según RS422
4 GND - Referencia GND para el transmisor
9 GND - Apantallamiento para el cable de conexión
5 VCC +5 V 5 %, 100 mA Alimentación auxiliar, cargar con 100mA como
máximo, pero a prueba de cortocircuitos
Tabla 7.10 Asignación de clavijas [X10]: entrada de transmisor incremental
7.9.4 Tipo y ejecución del cable [X10]
Recomendamos el uso de cables de conexión del transmisor en los cuales la señal del transmisor incremental vaya trenzada por pares y los distintos pares estén apantallados.

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 93
7.9.5 Indicaciones de conexión [X10]
A través de la entrada [X10] se pueden procesar tanto señales de transmisores incrementales, como señales de direccionamiento de impulsos, tales como las que
generan las tarjetas de control para los motores paso a paso.
El amplificador de entrada en la entrada de señales se ha dimensionado para el procesamiento de señales diferenciales según el estándar de interface RS422. Es posible el procesamiento de otras señales y niveles (p. ej. de 5 V de un solo extremo o 24 VHTL desde un PLC). Contacte con su oficina de ventas.
7.10 Conexión: salida de transmisor incremental [X11]
7.10.1 Ejecución en el aparato [X11]
- Conector D-SUB, 9 contactos, casquillo
7.10.2 Contraclavija [X11]
- Conector D-SUB, 9 contactos, clavija
- Cuerpo de conector D-SUB de 9 contactos con tornillo de bloqueo 4/40 UNC
7.10.3 Asignación de clavijas [X11]
Pin nº Denominación Valor Especificación
1 O 5 V / RA 66 *) Señal de transmisor incremental A
6 A# 5 V / RA 66 *) Señal de transmisor incremental A#
2 B 5 V / RA 66 *) Señal de transmisor incremental B
7 B# 5 V / RA 66 *) Señal de transmisor incremental B#
3 N 5 V / RA 66 *) Impulso de puesta a cero de transmisor
incremental N
8 N# 5 V / RA 66 *) Impulso de puesta a cero de transmisor
incremental N#
4 GND - Referencia GND para el transmisor
9 GND - Apantallamiento para el cable de conexión
5 VCC +5 V 5 %, 100 mA Alimentación auxiliar, cargar con 100 mA como
máximo, pero a prueba de cortocircuitos
*) La indicación para RA designa la resistencia de salida diferencial.
Tabla 7.11 Asignación de clavijas [X11]: salida de transmisor incremental
El excitador de la salida de señal transmite señales diferenciales (5 V) según el estándar de interface RS422.
Un aparato puede activar hasta 32 reguladores más.

7. Instalación eléctrica
94 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.11 Conexión: Bus CAN [X4]
7.11.1 Ejecución en el aparato [X4]
- Conector D-SUB, 9 contactos, clavija
7.11.2 Contraclavija [X4]
- Conector D-SUB, 9 contactos, casquillo
- Cuerpo de conector D-SUB de 9 contactos con tornillos de bloqueo 4/40 UNC
7.11.3 Asignación de clavijas [X4]
Pin nº Denominación Valor Especificación
1 – – No asignado
6 GND 0 V CAN-GND, unión galvánica con GND en el regulador
2 CANL *) Cable de señal CAN Low
7 CANH *) Cable de señal CAN High
3 GND 0 V CAN-GND, unión galvánica con GND en el regulador
8 – – No asignado
4 – – No asignado
9 – – No asignado
5 Apantallamiento PE Conexión para apantallado de cable
*) es necesaria una resistencia de terminación externa de 120 en ambos extremos del bus.
Recomendamos el uso de resistencias de película metálica con 1 % de tolerancia en el tamaño 0207.
Tabla 7.12 Asignación de clavijas de bus CAN [X4]
7.11.4 Indicaciones de conexión [X4]
Importante
En el cableado de los reguladores a través del bus CAN es fundamental que observe las siguientes informaciones e indicaciones para mantener un sistema estable sin perturbaciones. Si el cableado no es el apropiado, pueden surgir interferencias durante el funcionamiento en el bus CAN causantes de la desconexión de los reguladores por razones de seguridad en caso de fallo.
El bus CAN ofrece una opción sencilla y sin interferencias para la interconexión de todos los componentes de una instalación. Para ello es requisito indispensable observar todas las instrucciones de cableado indicadas a continuación.

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 95
Figura 7.5 Ejemplo de cableado para bus CAN
1. Los diferentes nodos de la red se conectan entre sí en línea por principio, de forma que el cable CAN vaya de regulador a regulador (véase Figura 7.5).
2. En cada uno de ambos extremos del cable del bus CAN debe haber exactamente una resistencia de terminación de 120 +/- 5 %. Con frecuencia ya hay instalada un
resistencia de terminación de este tipo en las tarjetas CAN o en un PLC, lo cual debe ser tenido en cuenta convenientemente.
3. Para el cableado hay que usar un cable apantallado con exactamente dos pares de hilos trenzados.
4. Un par de hilos trenzado se usa para la conexión entre CAN-H y CAN-L.
5. Los hilos del otro par se usan conjuntamente para CAN-GND.
6. El apantallamiento del cable se conduce en todos los nodos por las conexiones
CAN-Shield.
7. Puede solicitarse asesoramiento sobre el uso de conectores intercalados en el cableado del bus CAN. Si no obstante, este no fuera necesario, habrá que tener en cuenta que se usa un cuerpo metálico del conector para conectar el apantallamiento del cable.
8. Para mantener el acoplamiento de interferencias al mínimo posible, por principio se deberán adoptar las siguientes medidas:
- No tender los cables del motor en paralelo a los cables de señales.
- Los cables del motor deben cumplir las especificaciones de Festo.
- Los cables del motor deben estar correctamente apantallados y contar con puesta a tierra.
9. Para más información sobre la estructura de un cableado de bus CAN libre de perturbaciones, consultar la especificación "Controller Area Network protocol
specification", versión 2.0 de Robert Bosch GmbH, 1991.
2

7. Instalación eléctrica
96 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.12 Conexión: RS232/COM [X5]
7.12.1 Ejecución en el aparato [X5]
- Conector D-SUB, 9 contactos, casquillo
7.12.2 Contraclavija [X5]
- Conector D-SUB, 9 contactos, casquillo
- Cuerpo de conector D-SUB de 9 contactos con tornillos de bloqueo 4/40 UNC
7.12.3 Asignación de clavijas [X5]
Pin nº Denominación Valor Especificación
1 – – No asignado
6 – – No asignado
2 Rx 10 V / RI > 2 k Cable de recepción, especificación RS232
7 – – No asignado
3 Tx 10 V / RA < 2 k Cable de emisión, especificación RS232
8 - – No asignado
4 +RS485 – reservado para funcionamiento opcional de RS485
9 –RS485 – reservado para funcionamiento opcional de RS485
5 GND 0 V Interfaces GND, con conexión galvánica con GND
de la parte digital
Tabla 7.13 Asignación de clavijas de interface RS232 [X5]

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 97
7.13 Instrucciones para una instalación segura y conforme a la EMC
7.13.1 Explicaciones y conceptos
La compatibilidad electromagnética (en inglés electromagnetic compatibility, EMC, o electromagnetic interference, EMI) abarca los requerimientos siguientes:
Resistencia a interferencias
Una resistencia a interferencias suficiente de una instalación o equipo eléctricos contra las influencias perturbadoras eléctricas, magnéticas o electromagnéticas que procedan del exterior y que actúen sobre los cables o sobre un espacio.
Emisión de interferencias
Una resistencia a interferencias pequeña suficiente de perturbaciones eléctricas, magnéticas o electromagnéticas de una instalación o equipo eléctricos que actúan sobre otros equipos del entorno por los cables o el espacio.
7.13.2 Indicaciones de conexión
El apantallamiento del cable del motor debe guiarse por debajo del borne del cable del
CMMP-AS. El cable de motor de Festo ya incluye dicha banda de conexión en la pieza final.
Con mayores longitudes deben observarse medidas especiales de protección EMC.
Advertencia
Por razones de seguridad, es imprescindible conectar todos los conductores de protección a tierra PE antes de la puesta en marcha.
Observe que las conexiones a tierra entre los dispositivos y la placa de montaje tengan la mayor superficie posible para que desvíen correctamente las interferencias de alta frecuencia (HF).

7. Instalación eléctrica
98 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.13.3 Generalidades acerca de la EMC
La radiación perturbadora y la resistencia a interferencias de un servocontrolador de
posición siempre depende del diseño global del accionamiento, el cual está compuesto por los componentes siguientes:
Componentes - Fuente de alimentación
- Servocontrolador de posición
- Motor
- Electromecánica
- Ejecución y tipo de cableado
- Control superpuesto
Para incrementar la resistencia a las interferencias y reducir la emisión de interferencias, el servocontrolador de posición CMMP-AS ya lleva incorporado un filtro de red y válvulas de motor, de forma que el servocontrolador de posición CMMP-AS en la mayoría de aplicaciones puede funcionar sin ningún apantallamiento o filtro adicional.
Los servocontroladores de posición CMMP-AS han sido certificados de acuerdo con la norma EN 61800-3 vigente en materia de accionamientos eléctricos.
En la mayoría de los casos no es necesaria ninguna medida de filtrado externa (véase más abajo).
La declaración de conformidad sobre la directiva de EMC está disponible en Festo.

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 99
7.13.4 Áreas EMC: primer y segundo entornos
Los servocontroladores de posición CMMP-AS satisfacen, siempre y cuando se monten y
tiendan todos los cables de conexión debidamente, las prescripciones de la norma pertinente EN 61800-3. Dicha norma ya no versa sobre las "clases de valor límite", sino sobre los llamados entornos.
Importante
El "primer" entorno comprende las redes de alimentación conectadas a los edificios residenciales, mientras que el segundo entorno comprende las redes de alimentación conectadas exclusivamente en las industrias.
Para los servocontroladores de posición CMMP-AS es válido lo siguiente:
Tipo EMC Área Mantenimiento de los requerimientos EMC
Emisión de
interferencias
Segundo entorno
(zonas industriales)
Longitud de cable del motor hasta 25 m sin medidas de filtrado
externo.
Si se usan cables de motor más largos (25 a 50 m) hay que prever un
filtro de red adecuado.
Resistencia a
interferencias
Segundo entorno
(zonas industriales)
Independiente de la longitud de cable del motor
Tabla 7.14 Requerimientos EMC: primer y segundo entornos

7. Instalación eléctrica
100 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
7.13.5 Cableado conforme a EMC
Para montar un sistema de accionamiento cumpliendo con los requisitos de la EMC, se debe
tener en cuenta lo siguiente (véase también él capítulo 7 Instalación eléctrica, página 75):
1. Con el objetivo de mantener al mínimo posible las corrientes de desviación y las pérdidas en el cable del motor, el servocontrolador de posición CMMP-AS debe disponerse lo más cerca posible del motor (v. al respecto también el siguiente capítulo 7.13.6 Funcionamiento con cables de motor largos, página 101).
2. Los cables del motor y del transductor angular deben estar apantallados.
3. El apantallamiento del cable del motor se coloca en el cuerpo del servocontrolador de posición CMMP-AS (bornes de conexión del apantallamiento, borne de conexión elástica). Fundamentalmente el apantallado del cable también se coloca siempre en el servocontrolador de posición pertinente con el fin de refluir las corrientes de desviación también en los reguladores causantes.
4. La conexión PE de la red se conecta al punto de conexión PE de la conexión de alimentación [X9].
5. El conductor interno PE del cable se conecta al punto de conexión PE de la conexión del motor [X6].
6. Los cables de señal se deben separar de los cables de potencia lo máximo que se
pueda. No deben conducirse en paralelo. Si no se puede evitar un cruce de cables, éste se efectuará lo más vertical posible (es decir, en ángulo de 90º).
7. No se deben utilizar a cables de señal y mando sin apantallamiento. Si resultase imprescindible, como mínimo deberían trenzarse.
8. Incluso los cables apantallados presentan obligatoriamente en sus dos extremos pequeñas piezas no apantalladas (si no se utilizan cajas de enchufe apantalladas).
L1 : Aislado: 30 mm L3: Sensor de temperatura del motor y freno de sostenimiento: 140 mm
L2: 70 mm L4: Fase del motor y conductor protector del motor: 90 mm
Advertencia
¡PELIGRO!
Por razones de seguridad, es imprescindible conectar todos los conductores de protección a tierra PE antes de la puesta en marcha.
Es obligatorio observar las prescripciones de las normas EN 50178 y EN 60204-1 sobre puesta a tierra de protección en la instalación.

7. Instalación eléctrica
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 101
7.13.6 Funcionamiento con cables de motor largos
En aquellos casos que presenten cables de motor largos y/o en caso de elegir erróneamente los cables de motor de una capacidad insuficiente, se puede producir una
sobrecarga térmica de los filtros. Para evitar este tipo de problemas recomendamos, en aquellos casos en los cuales es necesario utilizar cables de motor largos, proceder urgentemente del siguiente modo:
- A partir de una longitud de cable de más de 25 m, sólo deberán colocarse cables con una capacitancia por unidad de longitud entre la fase del motor y el apantallamiento inferior a 150 pF/m y filtro de red adicional.
Con longitudes de cable mayores resultan diferentes amplificaciones del regulador de corriente (resistencia del tendido).
7.13.7 Protección EDS
Precaución
En las clavijas de conectores D-SUB sin asignar hay riesgo de que se produzcan daños en el aparato o en otras partes de la instalación, como resultado de ESD (descarga electrostática).
En el diseño del servocontrolador de posición CMMP-AS se ha dado especial importancia a una elevada resistencia a interferencias. Por esta razón se han ejecutado los distintos bloques funcionales con aislamiento galvánico. La transmisión de señales dentro del aparato se realiza a través de optoacopladores.
Se distinguen las siguientes áreas separadas:
Áreas separadas: - Etapa de potencia con circuito intermedio y entrada de alimentación de red
- Electrónica de control con procesamiento de las señales analógicas
- Alimentación de 24 V y entradas y salidas digitales

8. Puesta en funcionamiento
102 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
8. Puesta en funcionamiento
8.1 Instrucciones generales de conexión
Como el tendido de los cables de conexión resulta decisivo por lo que respecta a la EMC, es imprescindible tener en cuenta el capítulo 7.13.5 Cableado conforme a EMC anterior (página 100).
Advertencia
¡PELIGRO!
La no observancia del capítulo 2 "Medidas de seguridad para accionamientos y controles eléctricos" (página 13) puede causar daños materiales, lesiones corporales, descargas eléctricas o, en caso extremo, causar la muerte.
8.2 Herramienta / material
Herramienta - Destornillador en cruz tamaño 1
- Cable de interface serie
- Cable del transmisor del ángulo de giro
- Cable de motor
- Cable de alimentación de corriente
- Cable de habilitación de reguladores
- Si es preciso, conjunto de conectores: conector Power y SUB-D
8.3 Conectar el motor

8. Puesta en funcionamiento
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 103
Conectar el motor 1. Inserte el conector del cable del motor en el casquillo correspondiente y apriételo.
2. Conecte el cable PE del motor al PE de conector del motor [X6].
3. Conexión de las 3 fases del motor en el [X6].
4. Conexión del freno de sostenimiento y del sensor de temperatura en el [X6A] (opcional).
5. Insertar el conector PHOENIX en el casquillo [X6A] del aparato y apretar los tornillos de bloqueo.
6. Insertar el conector PHOENIX en el casquillo [X6] del aparato y apretar los tornillos de bloqueo.
7. Inserte el conector del cable del transmisor en el casquillo de la salida del transmisor en el motor y apriételo.
8. Inserte el conector D-Sub en el casquillo [X2A] del resolver o [X2B] del codificador del aparato y apriete los tornillos de bloqueo.
9. Colocar en plano el apantallamiento total del cable de motor o del transductor angular con el borne de apantallamiento SK14.
10. Compruebe de nuevo todos los racores rápidos.

8. Puesta en funcionamiento
104 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
8.4 Conexión del servocontrolador de posición CMMP-AS a la alimentación de corriente
Conectar el servocontrolador de posición
1. Asegúrese de que la alimentación de corriente esté desconectada.
2. Conecte el cable PE de la red al casquillo de puesta a tierra PE del conector de alimentación [X9] PIN4.
3. Inserte el conector PHOENIX en el casquillo [X9] del aparato.
4. Inserte el conector PHOENIX en el casquillo [X3] del aparato.
5. Conecte las conexiones 24 V a la unidad de alimentación apropiada.
6. Establezca las conexiones de alimentación de la red.
7. Compruebe de nuevo todos los racores rápidos.
8.5 Conexión del PC
Conexión del PC 1. Inserte el conector D-Sub del cable de interface serie en el casquillo para la interface de serie del PC y apriete los tornillos de bloqueo.
2. Inserte el conector D-Sub del cable de interface serial en el casquillo [X5] RS232/COM del servocontrolador de posición CMMP-AS y apriete los tornillos de bloqueo.
3. Compruebe de nuevo todos los racores rápidos.

8. Puesta en funcionamiento
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 105
8.6 Comprobación de disponibilidad para funcionar
Comprobación de disponibilidad para funcionar
1. Asegúrese de que la habilitación del regulador esté desconectada (habilitación del regulador: DIN 5 en [X1]).
2. Conecte la alimentación de tensión de todos los aparatos. El LED READY de la parte frontal del aparato debería estar encendido ahora.
Si el LED READY todavía no se enciende, hay algún fallo. Si el visualizador digital de siete segmentos muestra una secuencia de números, se trata de un mensaje de error cuya causa debe subsanar. En este caso, siga leyendo el capítulo 9.2 Mensajes de error (página 110). Si en el aparato no se enciende ningún indicador, proceda de la siguiente forma:
No se enciende ningún indicador
3. Desconecte la alimentación de corriente.
4. Espere 5 minutos para que pueda descargarse el circuito intermedio.
5. Compruebe todos los cables de conexión.
6. Compruebe la disponibilidad para funcionar de la alimentación de corriente de 24 V.
7. Conecte de nuevo la alimentación de corriente.

9. Funciones de servicio y mensajes de fallo
106 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
9. Funciones de servicio y mensajes de fallo
9.1 Funciones de protección y de servicio
9.1.1 Resumen
El servocontrolador de posición CMMP-AS posee una amplio sistema de sensores encargados de controlar el perfecto funcionamiento del núcleo del controlador, la etapa final de potencia, el motor y la comunicación con el entorno exterior. Todos los errores que se produzcan se guardan en la memoria interna de errores. La mayoría de errores provocan la desconexión del núcleo del servocontrolador de posición y del paso de salida de potencia. Entonces sólo se puede volver a conectar el servocontrolador de posición cuando se ha borrado la memoria de errores mediante el acuse de recibo y se ha eliminado el error (o éste ya no se produce más).
Un amplio sistema de sensores y funciones de supervisión aseguran la seguridad funcional:
- Medición de la temperatura del motor
- Medición de la temperatura de la unidad de potencia
- Detección de conexiones a tierra (PE)
- Detección de cortocircuitos entre dos fases del motor
- Detección del fallo de fase de la alimentación
- Detección del fallo de red de la alimentación
- Detección de sobretensiones en el circuito intermedio
- Detección de fallos en la alimentación interna
9.1.2 Detección de fallo de fase y de red
El servocontrolador de posición CCMP-AS detecta en el funcionamiento trifásico un fallo de fase (detección de fallo de fase) o el fallo de varias fases (detección de fallo de red) de la alimentación de la red del aparato.
9.1.3 Control de sobrecorriente y cortocircuitos
El control de sobrecorriente y cortocircuitos se activa en el momento en que se sobrepasa, en el circuito intermedio, la corriente doble máxima del regulador. Detecta cortocircuitos
entre dos fases del motor, así como cortocircuitos en los bornes de salida del motor contra el potencial de referencia positivo y negativo del circuito intermedio y contra PE. Cuando el control de errores detecta sobrecorriente, se produce una desconexión inmediata de la etapa final de potencia, con lo que se garantiza el anticortocircuitaje.

9. Funciones de servicio y mensajes de fallo
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 107
9.1.4 Control de sobretensión del circuito intermedio
El control de sobretensión del circuito intermedio se activa en cuanto la tensión del circuito intermedio supera el rango de tensión de funcionamiento. Con ello, la etapa final
de potencia se desconecta.
9.1.5 Control de la temperatura para el disipador de calor
La temperatura del disipador de calor de la etapa final de potencia se mide con un sensor lineal de temperatura. El límite de temperatura varía de un aparato a otro. Aproximadamente unos 5 °C por debajo del valor límite se activa una advertencia de temperatura.
9.1.6 Control del motor
Para controlar el motor y el transmisor giratorio de impulsos conectado, el servocontrolador de posición CMMP-AS dispone de las siguientes funciones de protección:
Control del encoder: Si se produce un error en el encoder, se provoca una desconexión de la etapa final de potencia. En el resolver se controla, p. ej., la señal de pista. En encoders incrementales se comprueban las señales de conmutación. Otros transmisores "inteligentes"
disponen de otras detecciones de fallos.
Medición y control de la temperatura del motor:
El servocontrolador de posición CMMP-AS posee una entrada digital y una analógica para detectar y controlar la temperatura del motor. Mediante la detección de señal analógica también se pueden usar sensores no lineales. Pueden elegirse como sensores térmicos:
En [X6]: Entrada digital para PTC, contactos normalmente cerrados y abiertos.
En [X2A] y [X2B]: Contactos normalmente cerrados y sensores analógicos de la serie KTY. Otros sensores (NTC, PTC) requieren en caso necesario la correspondiente adaptación por software.
9.1.7 Control I²t
El servocontrolador de posición CMMP-AS dispone de un control I²t para limitar la potencia disipada media en la etapa final de potencia y en el motor. Como la potencia disipada que se da en la electrónica de potencia y en el motor, en el mejor de los casos, aumenta al cuadrado con la corriente que fluye, se toma como medida de potencia disipada el valor de
corriente al cuadrado.
9.1.8 Control de potencia para el interruptor chopper de frenado
El software de servicio incluye un control de potencia para la resistencia de frenado interna.

9. Funciones de servicio y mensajes de fallo
108 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
9.1.9 Estado de puesta a punto
A los servocontrolador de posición que se envíen a Festo para servicio técnico se les provendrá de otro firmware y otros parámetros con el fin de poder comprobarlos.
Antes de volver a poner a punto el servocontrolador de posición CMMP-AS en el emplazamiento del cliente, se debe volver a parametrizar. El software "Festo Configuration Tool" consulta el estado de puesta a punto y solicita al usuario que parametrice el servocontrolador de posición. Al mismo tiempo el aparato señala por medio de un indicador óptico ‚A‘ en el visualizador digital de siete segmentos que se encuentra en estado operacional pero todavía no está parametrizado.
9.1.10 Descarga rápida del circuito intermedio
Una conmutación con retardo de tiempo del interruptor chopper de frenado según las clases de potencia con funcionamiento paralelo y fallo de la alimentación de la red garantiza que a través de las resistencias de frenado de las clases de potencia superiores se reciba la energía principal durante la descarga rápida del circuito intermedio.

9. Funciones de servicio y mensajes de fallo
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 109
9.2 Mensajes de modo de funcionamiento y de fallo
9.2.1 Indicación de modo de funcionamiento y de fallo
Se efectúa por medio del visualizador digital de siete segmentos. En la siguiente tabla se explica el significado de los símbolos mostrados:
Indicador Significado
En este modo de funcionamiento de se indican los segmentos externos "en
rotación". La indicación depende de la posición real o de la velocidad actuales.
Estando la liberación del regulador activa, la barra central también está activa.
El servocontrolador de posición CMMP-AS todavía se debe parametrizar.
(Visualizador digital de siete segmentos = "A")
Funcionamiento regulado por el momento de giro.
(visualizador digital = "I")
P xx Posicionamiento ("xx" corresponde al número de posición)
Las cifras se muestran una después de la otra.
PH x Recorrido de referencia. "x" corresponde a la fase correspondiente del recorrido
de referencia:
0 : Fase de búsqueda
1 : Fase de marcha lenta
2 : Movimiento a la posición cero
Las cifras se muestran una después de la otra.
E xx Mensaje de error con índice "xx" y subíndice "y"
-xxy- Mensaje de advertencia con índice principal "xx" y subíndice "y".
Una advertencia se muestra como mínimo dos veces en el visualizador digital de
siete segmentos
Opción "Parada segura" activa para la gama de aparatos CMMP-AS.
(visualizador digital de siete segmentos = "H", intermitente con una frecuencia
de 2 Hz)
Tabla 9.1 Indicación de modo de funcionamiento y de fallo

9. Funciones de servicio y mensajes de fallo
110 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
9.2.2 Mensajes de error
Cuando se produce un error, el servocontrolador de posición CMMP-AS indica cíclicamente
un mensaje de error en el visualizador digital de siete segmentos del servocontrolador de posición CMMP-AS. El mensaje de error se compone de una E (para Error), un índice principal y un subíndice como, p. ej.: E 0 1 0.
Las advertencias tienen el mismo número que un mensaje de error. Para diferenciarlas de estos, en las advertencias aparece un guión antes y después del número, p. ej. - 1 7 0 -.
La siguiente Tabla 9.2 indica el significado y las medidas a tomar ante los distintos mensajes:
Los mensajes de error con el índice principal 00 no señalan ningún error del tiempo de funcionamiento, sino que contienen información. Normalmente no se requiere ninguna medida por parte del usuario. Sólo aparecen en la memoria intermedia de fallos (buffer) y no se representan en el visualizador digital de siete segmentos.
Mensaje de error Significado del mensaje de error Medidas
Índice principal
Índice principal
Sub- índice
00 0 Fallo no válido Información: Se ha marcado un registro de
error no válido (corrupto) con este número
de error en la memoria intermedia de
errores.
No se requiere ninguna medida
1 Error no válido descubierto y corregido Información: Se ha descubierto y corregido
un registro de error no válido (corrupto) en
la memoria intermedia de errores.
En la información de depuración se
encuentra el número de error original.
No se requiere ninguna medida
2 Error borrado Información: Se ha realizado el acuse de
recibo de errores activos.
No se requiere ninguna medida
4 Número de serie / tipo de aparato
(cambio de módulo)
Información: Se ha insertado una memoria
de errores intercambiable (módulo de
servicio) en otro aparato.
No se requiere ninguna medida
01 0 Stack Overflow ¿Firmware erróneo?
Si es necesario, volver a cargar el firmware
estándar.
Contactar con el soporte técnico.
02 0 Subtensión circuito intermedio ¿Ajuste de prioridad de error demasiado
alto?
Comprobar tensión de circuito intermedio
(medir)

9. Funciones de servicio y mensajes de fallo
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 111
Mensaje de error Significado del mensaje de error Medidas
Índice principal
Índice principal
Sub- índice
03 0 Exceso de temperatura de motor
analógico
¿Motor demasiado caliente? Comprobar
parametrización (regulador de corriente,
valores límite de la corriente).
¿Sensor adecuado? ¿Sensor defectuoso?
Si el error donde se produce también con el
sensor puenteado: aparato defectuoso.
1 Exceso de temperatura de motor digital
04 0 Exceso de temperatura de unidad de
potencia
¿Indicación de temperatura plausible?
Comprobar condiciones de montaje,
¿rejillas de filtrado de ventiladores sucias?
¿Ventiladores defectuosos? 1 Sobretemperatura en el circuito
intermedio
05
0 Fallo de tensión interna 1 El error no lo puede subsanar por sí solo.
Enviar el servocontrolador de posición a la
oficina de ventas.
1 Fallo de tensión interna 2
2 Fallo de alimentación del excitador
3 Subtensión en I/O digitales Comprobar si hay cortocircuitos o carga
especificada en salidas y contactar con el
soporte técnico en caso necesario. 4 Sobrecorriente en I/O digitales
06 0 Etapa de salida, cortocircuito ¿Motor defectuoso?
¿Cortocircuito en el cable?
¿Etapa de salida defectuosa?
1 Cortocircuito de resistencia de frenado Comprobar si hay cortocircuito en
resistencia de frenado externa.
Comprobar salida de interruptor chopper
de frenado del servocontrolador de
posición.
07 0 Sobretensión en el circuito intermedio Comprobar la conexión con la resistencia
de frenado (interna/externa).
¿Sobrecarga en resistencia de frenado
externa? Comprobar el dimensionamiento.
08 0 Error del transductor angular resolver ¿Transductor angular conectado?
¿Cable del transductor angular defectuoso?
¿Transductor angular defectuoso?
Comprobar configuración de interface del
transductor angular.
Las señales del transmisor tienen
interferencias: Comprobar las
recomendaciones EMC en la instalación.
2 Error señales de pista Z0 encoder
incremental
3 Error señales de pista Z1 encoder
incremental
4 Error señales de pista encoder
incremental digital
5 Error de señales de transmisor Hall de
transmisor incremental
8 Error interno del transductor angular
9 Transductor angular en [X2B] no
compatible
Póngase en contacto con el soporte
técnico.

9. Funciones de servicio y mensajes de fallo
112 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Mensaje de error Significado del mensaje de error Medidas
Índice principal
Índice principal
Sub- índice
09 0 Conjunto de parámetros antiguo de
transductor angular (tipo CMMP-AS)
Póngase en contacto con el soporte
técnico.
1 No se puede descodificar el conjunto de
parámetros del transductor angular
2 Versión desconocida de conjunto de
parámetros de transductor angular
3 Estructura de datos defectuosa de
conjunto de parámetros de transductor
angular
7 EEPROM de transductor angular con
protección de escritura
9 EEPROM transductor angular demasiado
pequeña
10 0 Exceso de revoluciones (protección de
giro)
Comprobar parametrización del valor
límite.
¿Ángulo de offset incorrecto?
11 0 Error durante inicio de recorrido de
referencia
Falta habilitación de regulador
1 Fallo durante un recorrido de referencia El recorrido de referencia se ha
interrumpido, p. ej., debido a la cancelación
de la habilitación del regulador.
2 Recorrido de referencia:
no hay impulso de puesta a cero válido
Falta el impulso de puesta a cero requerido
3 Recorrido de referencia:
superación de límite de tiempo
Se alcanzó el tiempo máximo
parametrizado para el recorrido de
desplazamiento, antes incluso de que
finalizara el recorrido de referencia.
4 Recorrido de referencia:
detector de final de carrera incorrecto o
no válido
Detector de final de carrera
correspondiente no conectado.
¿Detector de final de carrera permutado?
5 Recorrido de referencia:
I²t / error de seguimiento
Rampas de aceleración inadecuadamente
parametrizadas.
Tope alcanzado no válido, p. ej. por no
haber ningún interruptor de referencia
conectado.
Contactar con el soporte técnico
6 Recorrido de referencia:
Final del trayecto de búsqueda alcanzado
Ha concluido el trayecto máximo permitido
del recorrido de referencia sin que se haya
alcanzado el punto de referencia o el
destino del recorrido de referencia.

9. Funciones de servicio y mensajes de fallo
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 113
Mensaje de error Significado del mensaje de error Medidas
Índice principal
Índice principal
Sub- índice
12 0 CAN:
número de nodo duplicado
Comprobar la configuración de
participantes en el bus CAN
1 CAN:
Fallo de comunicación, bus
desconectado
La tarjeta CAN ha interrumpido la
comunicación debido a errores de
comunicación (BUS OFF).
2 CAN: Fallo de comunicación CAN al enviar Al enviar mensajes las señales están
perturbadas.
3 CAN: Fallo de comunicación CAN al
recibir
Al recibir mensajes las señales están
perturbadas.
4 No se recibe ningún mensaje de Node
Guarding en el transcurso del tiempo
parametrizado
Compensación de tiempo de ciclo de frame
remota con la o fallo de unidad de mando.
¿Perturbación de señales?
9 CAN: error de protocolo Póngase en contacto con el soporte
técnico.
13 0 Timeout de bus CAN Comprobar la parametrización CAN
14 0 Alimentación insuficiente para
identificación
La tensión del circuito intermedio
disponible es insuficiente para realizar la
medición.
1 Identificación del regulador de corriente:
ciclo de medición insuficiente
La determinación automática de
parámetros suministra una constante de
tiempo que se encuentra fuera del rango de
valores parametrizables. Hay que optimizar
manualmente los parámetros.
2 No se ha podido dar orden para la
habilitación de la etapa final
La orden de habilitación de la etapa final no
se ha realizado; comprobar la conexión de
DIN4.
3 Etapa final desconectada
prematuramente
La habilitación de la etapa final se ha
desconectado estando en marcha la
identificación.
4 Identificación incompatible con el tipo de
transmisor ajustado
La identificación no se puede realizar con
los ajustes parametrizados del transductor
angular.
Comprobar la configuración del transductor
angular; en caso necesario, contactar con el
soporte técnico.
5 Imposibilidad de localizar el impulso de
puesta a cero
El impulso de puesta a cero no se ha
podido localizar tras ejecutarse el número
máximo permitido de giros eléctricos.
Comprobar la señal del impulso de puesta
a cero.

9. Funciones de servicio y mensajes de fallo
114 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Mensaje de error Significado del mensaje de error Medidas
Índice principal
Índice principal
Sub- índice
6 Señales Hall no válidas La secuencia de impulsos o la
segmentación de señales Hall no es
adecuada.
Comprobar la conexión; en caso necesario,
contactar con el soporte técnico.
7 No es posible la identificación Asegurarse de que hay una tensión
suficiente del circuito intermedio.
¿Rotor bloqueado?
8 Número de pares de polos no válido El número de pares de polos calculado se
encuentra fuera del rango parametrizado.
Comprobar la hoja de datos del motor; en
caso necesario, contactar con el soporte
técnico.
9 Identificación automática de parámetro
Fallo general
Se encontrará más información en los datos
de errores adicionales. Póngase en
contacto con el soporte técnico.
15 0 División entre 0 Póngase en contacto con el soporte
técnico. 1 Superación de rango
2 Flujo matemático insuficiente
16 0 Ejecución defectuosa del programa Póngase en contacto con el soporte
técnico. 1 Interrupt ilegal
2 Error de inicialización
3 Estado inesperado
17 0 Excedido el valor límite de error de
seguimiento
Ampliar ventana de error.
Aceleración ajustada demasiada alta.
1 Supervisión de diferencia entre
transmisores
¿Transductor angular externo no conectado
o defectuoso?
La desviación fluctúa, p. ej., por el juego de
los engranajes; aumentar el umbral de
desconexión en caso necesario.
21 0 Error 1 medición de corriente U El error no lo puede subsanar por sí solo.
Enviar el servocontrolador de posición a la
oficina de ventas.
1 Error 1 medición de corriente V
2 Error 2 medición de corriente U
3 Error 2 medición de corriente V
22 0 PROFIBUS:
Inicialización errónea
¿Módulo de tecnología defectuoso?
Póngase en contacto con el soporte
técnico. 1 PROFIBUS: Reservado
2 Error de comunicación PROFIBUS Comprobar dirección slave introducida
Comprobar conexión de bus
Comprobar cableado

9. Funciones de servicio y mensajes de fallo
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 115
Mensaje de error Significado del mensaje de error Medidas
Índice principal
Índice principal
Sub- índice
3 PROFIBUS:
dirección de slave incorrecta
Comunicación ya iniciada con la dirección
de slave 126.
Selección de otra dirección de slave.
4 PROFIBUS:
error en rango de valores
Error matemático en la conversión de las
unidades físicas. Rango de valores de datos
y de unidades físicas no acordes entre sí.
Contactar con el soporte técnico
25 0 Tipo de dispositivo no válido El error no lo puede subsanar por sí solo.
Enviar el servocontrolador a la oficina de
ventas. 1 Tipo de dispositivo no compatible
2 Revisión de hardware no compatible Comprobar la versión de firmware;
en caso necesario, requerir actualización al
soporte técnico.
3 Funcionamiento limitado del aparato. El aparato no está habilitado para las
funciones deseadas, por lo que debe ser
habilitado por Festo.
Para ello hay que enviar el aparato.
26 0 Falta conjunto de parámetros de usuario Cargar el conjunto de parámetros por
defecto.
Si persiste el error, enviar el
servocontrolador de posición a la oficina de
ventas.
1 Error suma de prueba El error no lo puede subsanar por sí solo.
Póngase en contacto con el soporte técnico. 2 Flash: error durante la escritura
3 Flash: error durante el borrado
4 Flash: error en Flash interno
5 Faltan datos de calibración
6 Conjunto de datos de posición del usuario
no disponibles
Ajustar la posición y memorizarla en el
servocontrolador de posición.
7 Error en las tablas de datos (CAM) Cargar el conjunto de datos por defecto;
en caso necesario, cargar de nuevo el
conjunto de datos.
Si persiste el error, contactar con el soporte
técnico.
27 0 Umbral de aviso error de seguimiento Comprobar la parametrización del error de
seguimiento.
¿Motor bloqueado?

9. Funciones de servicio y mensajes de fallo
116 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Mensaje de error Significado del mensaje de error Medidas
Índice principal
Índice principal
Sub- índice
28 0 Falta contador de tiempo de
funcionamiento
Realizar acuse de recibo del error.
Si se produce de nuevo el error, contactar
con el soporte técnico. 1 Contador de horas de servicio: Error de
escritura
2 Contador de tiempo de funcionamiento
corregido
3 Contador de tiempo de funcionamiento
convertido
30 0 Fallo interno de conversión
Póngase en contacto con el soporte técnico.
31 0 Motor I²t
¿Motor bloqueado?
1 Servocontrolador de posición I²t Comprobar el dimensionado de la potencia
del paquete de accionamiento.
2 PCF I²t Comprobar el dimensionado de la potencia
del accionamiento.
¿Seleccionar funcionamiento sin PFC?
3 Resistencia de frenado I²t Sobrecarga de resistencia de frenado.
¿Usar resistencia de frenado externa?
32 0 Tiempo de carga de circuito intermedio
sobrepasado
Contactar con el soporte técnico.
1 Subtensión para PFC activo
5 Sobrecarga de interruptor chopper de
frenado.
No se pudo descargar el circuito
intermedio.
6 Tiempo de descarga de circuito
intermedio sobrepasado
7 No hay alimentación de potencia para
habilitar el regulador
Tensión del circuito intermedio inexistente.
Transductor angular aún no dispuesto para
funcionar.
8 Fallo de alimentación de potencia
durante habilitación de regulador
Interrupciones/fallo de red de alimentación
de potencia.
Comprobar la alimentación de potencia.
9 Fallo de fase Fallo de una o más fases.
Comprobar la alimentación de potencia.
33 0 Error de seguimiento emulación de
encoder
Póngase en contacto con el soporte técnico.

9. Funciones de servicio y mensajes de fallo
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 117
Mensaje de error Significado del mensaje de error Medidas
Índice principal
Índice principal
Sub- índice
34 0 No hay sincronización a través del bus de
campo
¿Fallo de mensajes de sincronización del
master?
1 Fallo de sincronización del bus de campo ¿Fallo de mensajes de sincronización del
master?
¿Intervalo de sincronización parametrizado
demasiado estrecho?
35 0 Protección antigiro del motor lineal Perturbación de señales del transmisor.
Comprobar las recomendaciones EMC en la
instalación.
5 Error en determinación de posición de
conmutación
Se ha seleccionado un procedimiento
inadecuado para el motor. Póngase en
contacto con el soporte técnico.
36 0 El parámetro ha sido limitado Comprobar el conjunto de parámetros del
usuario 1 No se ha aceptado el parámetro
37 0 ... 9 Bus de campo SERCOS Contacte en caso necesario con el soporte
técnico.
38 0 ... 9 Bus de campo SERCOS Contacte en caso necesario con el soporte
técnico.
39 0 ... 6 Bus de campo SERCOS Contacte en caso necesario con el soporte
técnico.
40 0 Se ha alcanzado el detector de final de
carrera por software negativo
El valor nominal de posición ha alcanzado o
superado el correspondiente detector de
final de carrera por software.
Comprobar datos de destino.
Comprobar margen de posicionado.
1 Se ha alcanzado el detector de final de
carrera por software positivo
2 Posición de destino tras el detector de
final de carrera negativo
Se anuló el inicio de un posicionamiento ya
que el destino se encuentra tras el
respectivo detector final de carrera por
software.
Comprobar los datos de destino.
Comprobar el margen de posicionado.
3 Posición de destino tras el detector de
final de carrera positivo

9. Funciones de servicio y mensajes de fallo
118 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Mensaje de error Significado del mensaje de error Medidas
Índice principal
Índice principal
Sub- índice
42 0 Posicionamiento: Posicionamiento de
conexión inexistente:
parada
El destino de posicionamiento no se puede
alcanzar por las opciones de
posicionamiento o las condiciones
generales.
Comprobar la parametrización de los
registros de posición afectados.
1 Posicionamiento: cambio de sentido de
giro no permitido: Parada
2 Posicionamiento: cambio de sentido de
giro tras parada no permitido
3 Inicio de posicionamiento rechazado. No fue posible una conmutación del tipo de
funcionamiento por el conjunto de
parámetros.
No se permite el sentido de giro calculado
de acuerdo con el modo ajustado para el eje
cilíndrico.
Comprobar el modo seleccionado.
5 Eje cilíndrico. Sentido de giro no
permitido
43 0 Detector de final de carrera:
valor nominal negativo bloqueado
El accionamiento ha abandonado la zona de
movimiento prevista.
¿Defecto técnico en la instalación?
1 Detector de final de carrera:
valor nominal positivo bloqueado
2 Detector de final de carrera:
posicionamiento suprimido
45 0 No se puede desconectar la alimentación
del driver
Póngase en contacto con el soporte técnico.
1 No se puede activar la alimentación del
driver
2 Se ha activado la alimentación del driver
47 0 Timeout (operación de ajuste) El número de revoluciones necesario para la
operación de ajuste no se alcanzó a tiempo.
Comprobar el procesamiento del
requerimiento en el sistema de mando.
50 0 CAN:
Demasiados PDO sincronizados
Póngase en contacto con el soporte técnico.
60 0 Ethernet: específico
del usuario (1)
Póngase en contacto con el soporte técnico.
61 0 Ethernet: específico
del usuario (2)
Póngase en contacto con el soporte técnico.
64 0…6 Bus de campo DeviceNet Póngase en contacto con el soporte técnico.
65 0…1 Bus de campo DeviceNet Póngase en contacto con el soporte técnico.
70 1 ... 3 Bus de campo FHPP Póngase en contacto con el soporte técnico.

9. Funciones de servicio y mensajes de fallo
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 119
Mensaje de error Significado del mensaje de error Medidas
Índice principal
Índice principal
Sub- índice
80 0 Desbordamiento de regulador de
corriente, IRQ
Póngase en contacto con el soporte técnico.
1 Desbordamiento de regulador del número
de revoluciones, IRQ
2 Desbordamiento de controlador de
posición, IRQ
3 Desbordamiento de interpolador , IRQ
81 4 Desbordamiento de Low-Level, IRQ Póngase en contacto con el soporte técnico.
5 Desbordamiento de MDC de IRQ
82 0 Control secuencial Control secuencial interno: Se canceló el
proceso.
Sólo como información - No se requieren
medidas.
83 0 Módulo de tecnología no válido Posición de enchufe incorrecta / revisión de
hardware errónea.
Comprobar el módulo de tecnología;
contactar con el soporte técnico en caso
necesario.
1 Módulo de tecnología incompatible ¿Cargar el firmware adecuado?
Contactar con el soporte técnico en caso
necesario.
2 Módulo de tecnología: revisión de
hardware incompatible
¿Cargar el firmware adecuado?
Contactar con el soporte técnico en caso
necesario.
3 Módulo de tecnología: Error de escritura Póngase en contacto con el soporte técnico.
90 0 Componente de hardware no disponible
(SRAM)
Póngase en contacto con el soporte técnico.
1 Componente de hardware no disponible
(FLASH)
2 Error durante reinicio de FPGA
3 Error durante inicio de SD-ADUs
4 Error de sincronización de SD-ADU tras
inicio
5 SD-ADU no sincrónica
6 Error de trigger
9 Firmware de DEBUG (depuración) cargado
91 0 Fallo interno de inicialización Póngase en contacto con el soporte técnico.
Tabla 9.2 Mensajes de error

A. Especificaciones técnicas
120 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
A. Especificaciones técnicas
Condiciones del entorno Valores
Margen de temperatura admisible Temperatura de
almacenamiento:
de -25 °C a +70 °C
Temperatura de
funcionamiento:
de 0 °C a +40 °C
de +40 °C a +50 °C
con reducción de potencia 2,5 % / K
Altura de montaje permitida Hasta 1.000 m sobre el nivel del mar
De 1.000 a 4.000 m sobre el nivel del mar con reducción de potencia
Humedad del aire Humedad rel. del aire hasta el 90 %, sin condensación
Clase de protección IP20
Grado de ensuciamiento 2
Marcado CE (consultar declaración
de conformidad)
Según directiva EMC de la UE, directriva UE para máquinas y directiva
UE de baja tensión
Tabla A.1 Especificaciones técnicas: Condiciones ambientales y calificación
Función de seguridad: Parada segura (STO)*
Tipo CMMP-AS-C20-11A-P3
Nivel de rendimiento d según EN ISO 13849-1
Conforme a SIL 2
Categoría 3
MTTFd Canal 1 mediante X1 MMTFd = 714,81 a
Canal 2 mediante X3 MTTFd = 304,7 a
Emulación de encoder mediante X2b MTTFd = 337,86 a
Tabla A.2 Especificaciones técnicas: Función de seguridad: Parada segura (STO)
*) Se puede conseguir con módulos externos
Dimensiones y peso Tipo CMMP-AS-C20-11A-P3
Dimensiones del servocontrolador
de posición (Al*An*P)
(sin contraclavija, tornillo de
apantallamiento ni cabezas de
tornillo)
330 x 89 x 242 mm
Dimensiones de la placa de
montaje
369 x 80 mm
Peso Aprox. 8 kg.
Tabla A.3 Especificaciones técnicas: Dimensiones y peso

A. Especificaciones técnicas
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 121
Datos del cable Tipo CMMP-AS-C20-11A-P3
Longitud máx. del cable del motor para emisión de interferencias según EN 61800-3
Segundo entorno (zonas industriales) l 25 m (sin filtro)
Capacidad del cable de una fase contra
apantallamiento o entre dos cables
C 200 pF/m
Tabla A.4 Especificaciones técnicas: Datos del cable
Supervisión de la temperatura del motor
Valores
Sensor digital Contacto
normalmente
cerrado:
Rfrío < 500 Rcaliente > 100 k
Sensor analógico Sensor de temperatura de silicio, p. ej. KTY81, 82 o similar.
R25 2000
R100 3400
Tabla A.5 Especificaciones técnicas: Supervisión de la temperatura del motor
A.1 Elementos de mando e indicación
El servocontrolador de posición CMMP-AS posee en la cara frontal dos LED y un
visualizador digital de siete segmentos para indicar los estados operativos.
Elemento Función
Visualizador de siete segmentos Indicación del modo operacionales y, en caso de error,
un código de error codificado
LED1 Disponibilidad de funcionamiento
LED2 Indicación del estado bus CAN
Pulsador de RESET Reinicio de hardware para el procesador
Tabla A.6 Elemento indicador y pulsador de RESET
A.2 Unidad de alimentación [X9] Tipo CMMP-AS-C20-11A-P3
Tensión de alimentación 3 x 230 … 480 V AC [± 10 %] 50 … 60 Hz [± 10 %]
Alimentación CC alternativa 60 … 700 V DC
Tabla A.7 Especificaciones técnicas: Datos de potencia [X9]
Importante
Los frenos del motor no se pueden abrir al 100 % con el motor caliente y con una tensión de alimentación insuficiente (fuera del margen de tolerancia), lo que puede provocar un desgaste prematuro del freno.

A. Especificaciones técnicas
122 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Resistencia de frenado interna Tipo CMMP-AS-C20-11A-P3
Resistencia de frenado interna 47
Potencia pulsante 12 kW
Potencia continua 110 W
Umbral de respuesta 760 V
Tabla A.8 Especificaciones técnicas: Resistencia de frenado interna [X9]
Resistencia de frenado externa Tipo CMMP-AS-C20-11A-P3
Resistencia de frenado externa 30 RExtern 100
Potencia continua 5000 W
Tensión de funcionamiento 800 V
Tabla A.9 Especificaciones técnicas: Resistencia de frenado externa [X9]
A.3 Safe Torque Off y Supply 24 V [X3]
El servocontrolador de posición CMMP-AS también recibe su alimentación de corriente de 24 V DC para la electrónica de control a través del conector enchufable [X3].
Para las funciones de seguridad consulte el capítulo 5 "Técnica funcional de seguridad".
Supply 24 V Tipo CMMP-AS-C20-11A-P3
Tensión de alimentación 24 V DC [± 20 %] (0,8 A)*
Tabla A.10 Especificaciones técnicas: Tensión de alimentación [X3]
*) Añadir consumo de corriente de un posible freno de retención y de I/O.
A.4 Conexión del motor [X6]
Datos del motor Tipo CMMP-AS-C20-11A-P3
Datos para el funcionamiento en 3x400 V AC [± 10 %], 50 Hz con 5 kHz de frecuencia de etapa final
Potencia de salida 12 kVA
Tensión de salida 3 x 0…400 V AC [± 10 %]
Potencia máxima de salida durante 2 s 25 kVA
Corriente de salida 20 Aef
Corriente máxima de salida por 2 s 41,5 Aef
Frecuencia de ciclos máx. 12,5 kHz
Frecuencia de salida 0 … 1.000 Hz
En el servicio permanente,
corriente de red máx. 1)
19 Aef
1) para un cos en el circuito del motor de 0,7
Tabla A.11 Especificaciones técnicas: Datos de conexión del motor [X6]

A. Especificaciones técnicas
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 123
A.5 Conexión de transductor angular [X2A] y [X2B]
En el servocontrolador de posición CMMP-AS se pueden conectar distintos sistemas de
retorno a través del interface del encoder:
- Resolver (interface [X2A])
- Codificador (interface [X2B])
- Transmisor incremental con señales de pista analógicas y digitales
- Transmisor de SinCos (single/multiturn) con HIPERFACE
- Transmisor de valor absoluto Multiturn con EnDat
Con el software de parametrización FCT se determina a continuación el tipo de encoder.
La señal de retorno está disponible a través de la salida del transmisor incremental [X11] para los accionamientos sucesivos.
Es posible evaluar dos sistemas de encoder en paralelo. En este caso se conecta normalmente a [X2A] el Resolver para la regulación de corriente y a [X2B] p. ej. un transmisor de valores absolutos como señal de retorno para la regulación de posición.
A.5.1 Conexión del Resolver [X2A]
En la conexión D-SUB de 9 contactos [X2A] se evalúan las unidades de Resolver de uso corriente. Son compatibles unidades de Resolver de uno o varios contactos. El número de pares de polos debe ser identificado automáticamente por el usuario en el programa de parametrización FCT correspondiente.
El ángulo de offset del resolver determinado automáticamente durante en el curso de la identificación, se puede leer y escribir con fines del servicio técnico.
Parámetro Valores
Relaciones de transmisión 0,5
Frecuencia de la portadora 5 hasta 10 kHz
Tensión de excitación 7 Vef, a prueba de cortocircuitos
Impedancia de excitación (a 10 kHz) (20 + j20)
Impedancia del estator (500 + j500)
Tabla A.12 Especificaciones técnicas: Resolver [X2A]

A. Especificaciones técnicas
124 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
Parámetro Valor
Resolución 16 Bit
Tiempo de retardo del registro de señales < 200 µs
Resolución del número de revoluciones aprox. 4 min-1
Precisión absoluta del registro angular < 5’
Velocidad de giro máx. 16.000 min-1
Tabla A.13 Especificaciones técnicas: Interface de Resolver [X2A]
A.5.2 Conexión del encoder [X2B]
A través de la conexión D-SUB de 15 contactos [X2B] se puede realizar una conexión de retorno de motores con codificador. Los posibles transmisores incrementales para la conexión del codificador se dividen en varios grupos.
Transmisor incremental estándar sin señales de conmutación
Esta ejecución de transmisor se utiliza con motores lineales económicos, para ahorrarse los costes del puesta en marcha de las señales de conmutación (transmisor Hall). En estos transmisores se realiza una determinación automática de la posición polar del servocontrolador de posición CMMP-AS tras el encendido.
Transmisor incremental estándar con señales de conmutación
En esta variante se emplean transmisores incrementales estándar con tres señales de transmisor Hall binarias adicionales. El número de líneas del transmisor se puede parametrizar libremente (1–262144 líneas/vuelta).
Para las señales del transmisor Hall es válido un ángulo de offset adicional. Este es determinado en la identificación del motor o bien se puede ajustar por medio del software de parametrización. El ángulo de offset del transmisor Hall suele ser cero.
Transmisor Stegmann
Los transmisores giratorios de pulsos con HIPERFACE de la casa Stegmann son compatibles con las ejecuciones Singleturn y Multiturn. Se pueden conectar, p. ej., las siguientes series de transmisores:
- Transmisor SinCos Singleturn: SCS 60, SCS 70, SKS 36, SR 50, SR 60
- Transmisor SinCos Multiturn: SRM 50, SRM 60, SKM36, SCM 60, SCM 70
- Transmisor SinCos para accionamientos de eje hueco: SCS-Kit 101, SCM-Kit 101, SHS 170
Transmisor Heidenhain
Sí se evalúan los transmisores giratorios (encoder) incrementales y absolutos de la casa Heidenhain. Se pueden conectar, p. ej., las siguientes series de transmisores más empleadas:
- Heidenhain ERN1085, ERN 1387, ECN1313, RCN220, RCN 723, RON786, ERO1285, etc.
- Transmisores giratorios de pulsos (encoder) con interface EnDat.

A. Especificaciones técnicas
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 125
Parámetro Valores
Número de líneas del transmisor
parametrizable
1 – 262144 líneas/vuelta
Resolución angular/interpolación 10 bits / períodos
Señales de pista A, B 1 VSS diferencial; 2,5 V de offset
Señales de pista N 0,2 a 1 VSS diferencial; 2,5 V de offset
Pista de conmutación A1, B1 (opcional) 1 VSS diferencial; 2,5 V de offset
Impedancia de entrada de señales de
pista
Entrada diferencial 120
Frecuencia límite flímite > 300 kHz (pista de gran resolución)
fLímite aprox. 10 kHz (pista de conmutación)
Interfaces de comunicación adicionales EnDat (Heidenhain) e HIPERFACE (Stegmann)
Alimentación de salida 5 V o 12 V; máx. 300 mA; con limitación de corriente
Regulación mediante líneas de sensores
Valor nominal conmutable por software
Tabla A.14 Especificaciones técnicas: Evaluación de transmisor [X2B]
A.6 Interfaces de comunicación
A.6.1 RS232 [X5]
Interface de comunicación Valores
RS232 conforme a especificación RS232,
9600 baudios hasta 115,2 KBaudios
Tabla A.15 Especificaciones técnicas: RS232 [X5]
A.6.2 Bus CAN [X4]
Interface de comunicación Valores
CANopen Controller ISODIS 11898, Full-CAN-Controller, máx. 1 Mbaudio
Protocolo CANopen según DS301 y DSP402
Tabla A.16 Especificaciones técnicas: Bus CAN [X4]

A. Especificaciones técnicas
126 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
A.6.3 Interface I/O [X1]
Entradas/ Salidas digitales
Valores
Entradas de lógica en general 24 V (8 V ... 30 V) activo high, conforme con EN 61131-2
DIN0
DIN1
DIN2
DIN3
Bit 0 \
Bit 1, \ selección de destino para posicionamiento
Bit 2, / 16 destinos seleccionables de tabla de objetivos
Bit 3 /
DIN4 Entrada de mando de habilitación de la etapa final en High
DIN5 Regulador habilitado con High, acuse de recibo de error con Low
DIN6 Entrada de detector final de carrera 0
DIN7 Entrada de detector final de carrera 1
DIN8 Señal de mando de inicio de posicionamiento
DIN9 Interruptor de referencia para recorrido de referencia o memorización
de posiciones
Salidas de lógica generales Aislamiento galvánico, 24 V (8 V ... 30 V) high activo
DOUT0 preparado para funcionar 24 V, máx. 100 mA
DOUT1 Configuración libre 24 V, máx. 100 mA
DOUT2 libremente configurable,
opcionalmente utilizable como entrada DIN10
24 V, máx. 100 mA
DOUT3 libremente configurable,
opcionalmente utilizable como entrada DIN11
24 V, máx. 100 mA
DOUT4 [X6] Freno de sostenimiento 24 V, máx. 2 A
Tabla A.17 Especificaciones técnicas: Entradas y salidas digitales [X1]
Entradas/salidas analógicas Valores
Entrada analógica de alta
resolución:
AIN0
10 V margen de entrada, 16 bits, diferencial,
< 250 µs tiempo de retardo
Entrada analógica:
AIN1
Esta entrada también se puede
parametrizar opcionalmente como
entrada digital DIN AIN1 con
un umbral de conmutación de 8 V
10 V, 10 bits,
de un solo extremo,
< 250 µs de tiempo de retardo
Entrada analógica:
AIN2
Esta entrada también se puede
parametrizar opcionalmente como
entrada digital DIN AIN2 con
un umbral de conmutación de 8 V
10 V, 10 bits,
de un solo extremo,
< 250 µs de tiempo de retardo
Salidas analógicas:
AOUT0 y AOUT1
10 V de margen de salida, 9 bits de resolución, flímite > 1 kHz
Tabla A.18 Especificaciones técnicas: Entradas y salidas analógicas [X1]

A. Especificaciones técnicas
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 127
A.6.4 Entrada de transmisor incremental [X10]
La entrada es compatible con todos los transmisores incrementales más habituales en el
mercado.
Por ejemplo, los transmisores correspondientes al estándar industrial ROD426 de Heidenhain o los transmisores con salidas TTL de un solo extremo ("single-ended") y salidas "open-collector".
De forma alternativa, las señales de pista A y B del aparato son interpretadas como señales de sentido del impulso, de forma que el regulador también puede ser activado por tarjetas de mando de motores paso a paso.
Parámetro Valor
Número de líneas del transmisor
parametrizable
1 – 228 líneas/vuelta
Señales de pista: A, #A, B, #B, N, #N Según especificación RS422
Frecuencia máxima de entrada 1.000 kHz
Interface de sentido de impulso:
CLK, #CLK, DIR, #DIR, RESET, #RESET
Según especificación RS422
Alimentación de salida 5 V, máx. 100 mA
Tabla A.19 Especificaciones técnicas: entrada de transmisor incremental [X10]
A.6.5 Salida de transmisor incremental [X11]
La salida facilita señales del transmisor incremental para el procesamiento en sistemas de mando superpuestos.
Las señales son generadas a partir del ángulo de giro del transmisor con un número de líneas libremente programable.
La emulación facilita, además de las señales de pista A y B, un impulso de puesta a cero que cambia a high durante la duración de ¼ del periodo de la señal (mientras las señales de pista A y B sean high) una vez por vuelta (para el número de líneas programable).
Parámetro Valor
Número de líneas de salida Programable 1 –16384 líneas/vuelta
Nivel de conexión Diferencial/especificación RS422
Señales de pista A, B, N Según especificación RS422
Características especiales Pista N desconectable
Impedancia de salida Ra,dif = 66
Frecuencia límite flímite > 1,8 MHz (líneas/s)
Secuencia de flanco limitable mediante parámetro
Alimentación de salida 5 V, máx. 100 mA
Tabla A.20 Especificaciones técnicas: salida de transmisor incremental [X11]

A. Especificaciones técnicas
128 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH

B. Glosario
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 129
B. Glosario
EMC
La compatibilidad electromagnética (en inglés electromagnetic compatibility, EMC, o electromagnetic interference, EMI) abarca los requerimientos siguientes:
Resistencia a interferencias
Una resistencia a interferencias suficiente de una instalación o equipo eléctricos contra las influencias perturbadoras eléctricas, magnéticas o electromagnéticas que procedan del exterior y que actúen sobre los cables o sobre un espacio.
Emisión de interferencias
Una resistencia a interferencias pequeña suficiente de perturbaciones eléctricas, magnéticas o electromagnéticas de una instalación o equipo eléctricos que actúan sobre otros equipos del entorno por los cables o el espacio.

B. Glosario
130 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH

C. Índice
Festo P.BE-CMMP-AS-C20-11A-ES 1010NH 131
C. Índice
A
Activación segura del freno de retención ..................................... 59
Asignación de conectores enchufables ...................................... 75
B
Bus CAN ............................................... 34 Bus CAN [X4] ...................................... 123
C
Categoría de Stop ................................ 51 Chopper de frenado ............................. 30 Compensación del momento
de la carga en ejes verticales ............ 41
Comprobación de disponibilidad para funcionar ................................ 103
Comprobación de la función de seguridad ......................................... 57
Conexión de la alimentación de corriente .................................... 102
Conexión de transductor angular [X2A] y [X2B] ...................... 121
Conexión del encoder [X2B] ............... 122 Conexión del PC ................................. 102 Conexión del Resolver [X2A] .............. 121 Conexión: Bus CAN [X4] ....................... 93 Conexión: comunicación de I/O [X1] .... 82 Conexión: Encoder [X2B] ...................... 88 Conexión: entrada de transmisor
incremental [X10] ............................. 91 Conexión: Fuente de
alimentación [X9] .............................. 78 Conexión: Motor [X6] y [X6A]................ 79 Conexión: Resolver [X2A] ..................... 87 Conexión: RS232/COM [X5] ................. 95 Conexión: Safe Standstill [X3] .............. 86
Conexión: salida de transmisor incremental [X11] ............................. 92
Contenido .............................................. 5 Contraclavija [X9] ................................. 78 Control de posicionamiento ................. 43 Control de sobrecorriente y
cortocircuitos ................................. 104
Control de trayectoria con interpolación lineal .................... 48
Cuadro general de funciones ............... 37
D
Descripción del diagrama de temporización SS1: .......................... 61
Diagrama de temporización de STO ..... 53 Diagrama de temporización SS1 .......... 60 Documentación ................................... 11 Dotación del suministro ....................... 11
E
Ejemplo de conexión de circuito CMMP-AS STO ...................... 55
Elementos de mando e indicación ..... 119 EMC ................................................... 127 Entrada de parada opcional ................. 47 Especificaciones técnicas .................. 118
F
Fuentes del valor nominal .................... 39 Función integrada "STO" ..................... 52 Funcionamiento normal
Restablecer ...................................... 66 Funcionamiento regulado por el
momento de giro .............................. 39 Funcionamiento regulado por la
velocidad .......................................... 40 Funciones de I/O y mando del equipo . 35 Funciones de servicio y mensajes
de fallo ........................................... 104
G
Generador de perfiles de movimiento .. 45 Generalidades acerca de la EMC .......... 97 Gestión del frenado ............................. 43 Gestión del valor nominal .................... 39
Glosario ............................................. 127 EMC
Emisión de interferencias ............ 127 Resistencia a interferencias ........ 127
EMC ................................................ 127

C. Índice
132 Festo P.BE-CMMP-AS-C20-11A-ES 1010NH
I
Importante General ............................................. 14
Seguridad ......................................... 13 Instalación eléctrica ............................. 75 Instalación mecánica ........................... 69 Instrucciones para una instalación
segura y conforme a la EMC .............. 96 Interface
RS232 ............................................... 32 RS485 ............................................... 34
Interface I/O [X1] ............................... 124 Interfaces de comunicación ............... 123
M
Medidas de seguridad ................... 13, 16 Modulación de la duración
de impulsos (PWM) .......................... 38 Motores lineales .................................. 37
P
PDO
Process Data Object ......................... 34 PNOZ X2P ............................................ 51 PNOZ XV2P .......................................... 51 Posicionamiento absoluto ................... 44 Posicionamiento con varios ejes
con sincronización del tiempo .......... 48 Posicionamiento relativo ..................... 44 Posicionamiento y regulación
de la posición ................................... 41 Profibus ............................................... 35 Protección EDS .................................. 100 Puesta en funcionamiento
secuencia ....................................... 101
R
Rearranque después de la activación de "Parada segura" .......................... 54
Recorrido de referencia ....................... 45 Regulación del número
de revoluciones limitada por el par de giro .............................. 41
Requerimiento de PARADA DE EMERGENCIA ................. 56
RS232 [X5] ......................................... 123 RS485 .................................................. 34
S
Safe Stop 1 .......................................... 51 Safe Torque Off .................................... 51 SDO
Service Data Object .......................... 34 Secuencias de posicionamiento .......... 46 Señal de transmisor incremental ....... 125 Servocontrolador de posición .............. 25 Servoconvertidor de AC ....................... 25 Servomotores sincrónicos ................... 37 Sincronización con fuentes
de pulsos externas ........................... 41 Sincronización, engranaje eléctrico ..... 42
Sistema completo del CMMP-AS .......... 76 SS1 ...................................................... 51 SS1, Safe Stop 1 .................................. 59 STO ...................................................... 51
T
Técnica funcional de seguridad ........... 49
U
Unidad de alimentación [X9] .............. 119 Uso previsto general ............................ 49
V
Vista del aparato ................................. 71


















