Controladores Industriales 25 28

of 4
-
Upload
totto-alves -
Category
Documents
-
view
213 -
download
0
Transcript of Controladores Industriales 25 28
-
7/24/2019 Controladores Industriales 25 28
1/4
1-25
Solucin
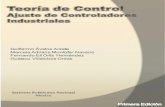
A continuacin se presenta el diagrama de bloques del sistema de control del proceso
representado en la figura 1.
Figura 3: Diagrama de bloques de control de flujo
Los pasos siguientes se avocan al clculo de cada una de las funciones de transferencia del
diagrama de bloques de la figura 3.
Ganancia Kc.K1 del amplificador- controlador (span)
El amplificador/controlador se representa por el producto de ganancias Kc.K1. La ganacia del
amplificador Kc, se calcula segn la ecuacin que se muestra a continuacin :
KV
mAV
mAc = =48
163
La ganancia del controlador K1, se deja igual a K1 = 1 por los momentos.
Parmetros del motor
Ganancia del motor
Kmv=1
480 020833
pu seg
V
puV seg
lg/,
lg.
Clculo de Tm: se obtiene a partir de la fig ura 2 donde tr = 550 mseg.
En t2la respuesta del sistema es : para 90% 12
et
Tm
4 20
48
0
mA
Vol
-
7/24/2019 Controladores Industriales 25 28
2/4
1-26
En t1la respuesta del sistema es: para 10% 11
et
Tm
Relacionando a ambas
1/9= e Tmt t ( ) /2 1
0,111 = e
-0,55/Tm
entonces Tm=0,25 seg.Parmetros de la vlvula
Clculo de Kr : se relaciona el desplazamiento del vastago con la rata de flujo de salida.
Kr=150
15
gpm
pu, lg.= 100 gpm/pulg
Parmetros del transductor diferencial de presin
Clculo de KT:ganancia del medidor de flujo
KT=
16
160
mA
gpm = 0,1 mA/gpm
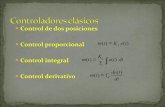
Sustituyendo todos los parmetros encontrados, se construye el diagrama de bloques de
control mostrado en la figura 4.
R(s)
+
-
Figura 1.21. Diagrama de bloques de control
Funcin de transferencia de lazo abierto (FTLA)
FTLA : G(jw) H(jw)=0 624
0 25 1
,
( , )jw jw + (1)
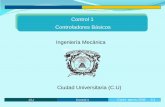
A continuacin se presenta el diagrama de Bode de esta FTLA.
3 K1 0,0208
s(1+0,25s)100
0,1
Prop.
Q(s)
-
7/24/2019 Controladores Industriales 25 28
3/4
1-27
Magnitud :
K = 0.624 20 logK -4,0963
jw1
-20 Log w
(0,25jw+1)-1
wc =
1
0 25,
w w
w w
c
c
20 1 0
20
log
log
=
w
Fase: a) Para K = 0
b) Para jw1
= -90
c) Para (0,25jw+1)-1
se construye la tabla siguiente :
w (rad) -arctg 0,25w Total (a + b + c)
0,1 -1,432 -91,432
0,5 -7,125 -97,125
1 -14 -104
5 -51,34 -141,34
10 -68,2 -158,2
50 -85,43 -175,43
100 -87,70 -177,7
-
7/24/2019 Controladores Industriales 25 28
4/4
1-28
10-1
100
101
102
-100
-50
0
50
Frequency (rad/sec)
Gaind
B
Gm=Inf dB, (w= NaN) Pm=81.24 deg. (w=0.6167)
10-1
100
101
102
0
-90
-180
-270
-360
Frequency (rad/sec)
Phase
deg
Fig 1.22. Diagrama de Bode de)125.0(
625.0)(
+=
jwjwsGH
Funcin de transferencia de lazo cerrado (FTLC)
FTLC :Q s
R s s s
( )
( ) . ,=
+ +
25
4 22 5 (2)
Respuesta temporal a lazo cerrado
R(s) =8/s por lo que
Q(s)=200
4 2 52s s s( , )+ +=
200
0 775 3 225s s s( , )( , )+ + (3)
q*(t)= 80+25,31e
-3,225t-105,3e
-0,775(4)
q(t)= q*(t)+ 20gpm. (5)