
DETECCIÓN DE MATRÍCULAS MEDIANTE … · Resumen En este proyecto ... turador de eventos de la...
76
FACULTAD DE INFORMÁTICA INGENIERÍA SUPERIOR INFORMÁTICA DEPARTAMENTO DE INFORMÁTICA Y SISTEMAS PROYECTO FINAL DE CARRERA DETECCIÓN DE MATRÍCULAS MEDIANTE CARACTERÍSTICAS BINARIAS LOCALES (LBP) AUTOR JULIO SOLER DEL POZO TUTOR ALBERTO RUIZ GARCÍA Junio de 2009
Transcript of DETECCIÓN DE MATRÍCULAS MEDIANTE … · Resumen En este proyecto ... turador de eventos de la...

FACULTAD DE INFORMAacuteTICAINGENIERIacuteA SUPERIOR INFORMAacuteTICA
DEPARTAMENTO DE INFORMAacuteTICA Y SISTEMAS
PROYECTO FINAL DE CARRERA
DETECCIOacuteN DE MATRIacuteCULASMEDIANTE CARACTERIacuteSTICAS
BINARIAS LOCALES (LBP)
AUTOR
JULIO SOLER DEL POZO
TUTOR
ALBERTO RUIZ GARCIacuteA
Junio de 2009
Resumen
En este proyecto abordamos el anaacutelisis disentildeo y desarrollo de un detector de matriacuteculas de
automoacutevil El objetivo final de este trabajo es crear un sistema que reconozca en tiempo real
la existencia de una placa de matriacutecula independientemente del tamantildeo y rotacioacuten que pueda
tener y determinar cuales son los diacutegitos de los que consta El sistema tratado en este proyecto
aborda las teacutecnicas y meacutetodos para detectar la regioacuten de la posible matriacutecula y los diacutegitos que
la componen En el anaacutelisis disentildeo y desarrollo del sistema se ha trabajado con la teacutecnica LBP
para el tratamiento de patrones con caracteriacutesticas locales y posteriormente con un clasificador
de contornos para detectar los diacutegitos correctos Durante el desarrollo las pruebas han sido re-
alizadas tanto con imaacutegenes estaacuteticas como con viacutedeos
En concreto para el desarrollo de la aplicacioacuten hemos usado el framework de procesado
de imaacutegenes QVision basado en el lenguaje de programacioacuten C++ y las libreriacuteas QT4 IPP y
OpenGL Tambieacuten se ha hecho uso del lenguaje para procesamiento matemaacutetico Octave
Palabras Clave Visioacuten por computador reconocimiento automaacutetico de matriacuteculas re-
conocimiento de formas reconocimiento de diacutegitos OCR
3
Iacutendice general
CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS 13
11 Introduccioacuten 13
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial 13
112 Aspectos matemaacuteticos de los sistemas RAPM 15
113 Aspectos fiacutesicos en los sistemas RAPM 15
12 Estado del arte 16
13 Organizacioacuten del documento 18
CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS 21
21 Objetivos y alcance del proyecto 21
22 Queacute no es objetivo del proyecto 22
23 Plan de trabajo 22
CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS 25
31 Teacutecnicas Utilizadas 25
311 Local Binary Patterns (LBP) 25
312 Clasificacioacuten mediante pseudoinversa 27
313 Obtencioacuten de los vectores de propiedades 28
314 Obtencioacuten del contorno de los diacutegitos 29
315 Teacutecnica de binarizacioacuten de Otsu 30
32 Herramientas Utilizadas 32
5
IacuteNDICE GENERAL IacuteNDICE GENERAL
321 Eleccioacuten del Lenguaje 32
322 QVision 33
323 Intelreg Integrated Perfomance Primitives IPP 34
324 QT Library 34
325 Octave 35
CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO 37
41 Estructura del Proyecto 37
42 Construccioacuten de viacutedeos de entrenamiento 38
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
44 Construccioacuten del clasificador 43
441 Generacioacuten del fichero de propiedades 43
442 Construccioacuten del clasificador en Octave 45
443 Aplicacioacuten del clasificador 47
45 Localizacioacuten de los diacutegitos de la matriacutecula 50
451 Binarizacioacuten de la imagen 50
452 Obtencioacuten del contorno de diacutegitos 55
453 OCR (Optical Character Recognition) 57
CAPIacuteTULO 5 CONCLUSIONES 63
51 Una vista atraacutes 63
52 Dificultades y limitaciones 63
53 Viacuteas futuras 64
54 Objetivos cumplidos 64
CAPIacuteTULO A MANUAL DE USUARIO 67
A1 Ejecucioacuten del programa 67
CAPIacuteTULO B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN 69
B1 Meacutetodo basado en bordes 69
6
IacuteNDICE GENERAL IacuteNDICE GENERAL
B2 Buacutesqueda iterativa 70
B3 Media 70
B4 Maacuteximo y miacutenimo 70
B5 Otras teacutecnicas 70
CAPIacuteTULO C TRANSFORMADA DE FOURIER 71
C1 Propiedades de la Transformada de Fourier 71
C2 Optimizacioacuten de la Transformada de Fourier 73
7
IacuteNDICE GENERAL IacuteNDICE GENERAL
8
Lista de Figuras
41 Controles en modo graacutefico del Trigger 39
42 Coordenadas de los puntos del ROI 42
43 ROI de barrido de la imagen 43
44 Parrilla de RBIrsquos que cubren la imagen 44
45 RBIrsquos candidatos a placa de matriacutecula 49
46 Los dos mejores candidatos 49
47 Resultado de imagen binarizada 52
48 Representacioacuten de poliliacuteneas 52
49 Aplicacioacuten de IPE con aacuterea igual a cero 53
410 Aplicacioacuten de IPE con aacuterea mayor que cero 54
411 Nueva zona de trabajo 55
412 Contornos maacutes cercanos al centro del ROI candidato 56
413 Contornos no deseados 57
414 Obtencioacuten de contornos final 58
415 Obtencioacuten de contornos ampliado 59
9
LISTA DE FIGURAS LISTA DE FIGURAS
10
Lista de Tablas
41 Tasas de fallo del clasificador 47
11
12 LISTA DE TABLAS
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

Resumen
En este proyecto abordamos el anaacutelisis disentildeo y desarrollo de un detector de matriacuteculas de
automoacutevil El objetivo final de este trabajo es crear un sistema que reconozca en tiempo real
la existencia de una placa de matriacutecula independientemente del tamantildeo y rotacioacuten que pueda
tener y determinar cuales son los diacutegitos de los que consta El sistema tratado en este proyecto
aborda las teacutecnicas y meacutetodos para detectar la regioacuten de la posible matriacutecula y los diacutegitos que
la componen En el anaacutelisis disentildeo y desarrollo del sistema se ha trabajado con la teacutecnica LBP
para el tratamiento de patrones con caracteriacutesticas locales y posteriormente con un clasificador
de contornos para detectar los diacutegitos correctos Durante el desarrollo las pruebas han sido re-
alizadas tanto con imaacutegenes estaacuteticas como con viacutedeos
En concreto para el desarrollo de la aplicacioacuten hemos usado el framework de procesado
de imaacutegenes QVision basado en el lenguaje de programacioacuten C++ y las libreriacuteas QT4 IPP y
OpenGL Tambieacuten se ha hecho uso del lenguaje para procesamiento matemaacutetico Octave
Palabras Clave Visioacuten por computador reconocimiento automaacutetico de matriacuteculas re-
conocimiento de formas reconocimiento de diacutegitos OCR
3
Iacutendice general
CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS 13
11 Introduccioacuten 13
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial 13
112 Aspectos matemaacuteticos de los sistemas RAPM 15
113 Aspectos fiacutesicos en los sistemas RAPM 15
12 Estado del arte 16
13 Organizacioacuten del documento 18
CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS 21
21 Objetivos y alcance del proyecto 21
22 Queacute no es objetivo del proyecto 22
23 Plan de trabajo 22
CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS 25
31 Teacutecnicas Utilizadas 25
311 Local Binary Patterns (LBP) 25
312 Clasificacioacuten mediante pseudoinversa 27
313 Obtencioacuten de los vectores de propiedades 28
314 Obtencioacuten del contorno de los diacutegitos 29
315 Teacutecnica de binarizacioacuten de Otsu 30
32 Herramientas Utilizadas 32
5
IacuteNDICE GENERAL IacuteNDICE GENERAL
321 Eleccioacuten del Lenguaje 32
322 QVision 33
323 Intelreg Integrated Perfomance Primitives IPP 34
324 QT Library 34
325 Octave 35
CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO 37
41 Estructura del Proyecto 37
42 Construccioacuten de viacutedeos de entrenamiento 38
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
44 Construccioacuten del clasificador 43
441 Generacioacuten del fichero de propiedades 43
442 Construccioacuten del clasificador en Octave 45
443 Aplicacioacuten del clasificador 47
45 Localizacioacuten de los diacutegitos de la matriacutecula 50
451 Binarizacioacuten de la imagen 50
452 Obtencioacuten del contorno de diacutegitos 55
453 OCR (Optical Character Recognition) 57
CAPIacuteTULO 5 CONCLUSIONES 63
51 Una vista atraacutes 63
52 Dificultades y limitaciones 63
53 Viacuteas futuras 64
54 Objetivos cumplidos 64
CAPIacuteTULO A MANUAL DE USUARIO 67
A1 Ejecucioacuten del programa 67
CAPIacuteTULO B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN 69
B1 Meacutetodo basado en bordes 69
6
IacuteNDICE GENERAL IacuteNDICE GENERAL
B2 Buacutesqueda iterativa 70
B3 Media 70
B4 Maacuteximo y miacutenimo 70
B5 Otras teacutecnicas 70
CAPIacuteTULO C TRANSFORMADA DE FOURIER 71
C1 Propiedades de la Transformada de Fourier 71
C2 Optimizacioacuten de la Transformada de Fourier 73
7
IacuteNDICE GENERAL IacuteNDICE GENERAL
8
Lista de Figuras
41 Controles en modo graacutefico del Trigger 39
42 Coordenadas de los puntos del ROI 42
43 ROI de barrido de la imagen 43
44 Parrilla de RBIrsquos que cubren la imagen 44
45 RBIrsquos candidatos a placa de matriacutecula 49
46 Los dos mejores candidatos 49
47 Resultado de imagen binarizada 52
48 Representacioacuten de poliliacuteneas 52
49 Aplicacioacuten de IPE con aacuterea igual a cero 53
410 Aplicacioacuten de IPE con aacuterea mayor que cero 54
411 Nueva zona de trabajo 55
412 Contornos maacutes cercanos al centro del ROI candidato 56
413 Contornos no deseados 57
414 Obtencioacuten de contornos final 58
415 Obtencioacuten de contornos ampliado 59
9
LISTA DE FIGURAS LISTA DE FIGURAS
10
Lista de Tablas
41 Tasas de fallo del clasificador 47
11
12 LISTA DE TABLAS
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
Iacutendice general
CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS 13
11 Introduccioacuten 13
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial 13
112 Aspectos matemaacuteticos de los sistemas RAPM 15
113 Aspectos fiacutesicos en los sistemas RAPM 15
12 Estado del arte 16
13 Organizacioacuten del documento 18
CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS 21
21 Objetivos y alcance del proyecto 21
22 Queacute no es objetivo del proyecto 22
23 Plan de trabajo 22
CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS 25
31 Teacutecnicas Utilizadas 25
311 Local Binary Patterns (LBP) 25
312 Clasificacioacuten mediante pseudoinversa 27
313 Obtencioacuten de los vectores de propiedades 28
314 Obtencioacuten del contorno de los diacutegitos 29
315 Teacutecnica de binarizacioacuten de Otsu 30
32 Herramientas Utilizadas 32
5
IacuteNDICE GENERAL IacuteNDICE GENERAL
321 Eleccioacuten del Lenguaje 32
322 QVision 33
323 Intelreg Integrated Perfomance Primitives IPP 34
324 QT Library 34
325 Octave 35
CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO 37
41 Estructura del Proyecto 37
42 Construccioacuten de viacutedeos de entrenamiento 38
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
44 Construccioacuten del clasificador 43
441 Generacioacuten del fichero de propiedades 43
442 Construccioacuten del clasificador en Octave 45
443 Aplicacioacuten del clasificador 47
45 Localizacioacuten de los diacutegitos de la matriacutecula 50
451 Binarizacioacuten de la imagen 50
452 Obtencioacuten del contorno de diacutegitos 55
453 OCR (Optical Character Recognition) 57
CAPIacuteTULO 5 CONCLUSIONES 63
51 Una vista atraacutes 63
52 Dificultades y limitaciones 63
53 Viacuteas futuras 64
54 Objetivos cumplidos 64
CAPIacuteTULO A MANUAL DE USUARIO 67
A1 Ejecucioacuten del programa 67
CAPIacuteTULO B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN 69
B1 Meacutetodo basado en bordes 69
6
IacuteNDICE GENERAL IacuteNDICE GENERAL
B2 Buacutesqueda iterativa 70
B3 Media 70
B4 Maacuteximo y miacutenimo 70
B5 Otras teacutecnicas 70
CAPIacuteTULO C TRANSFORMADA DE FOURIER 71
C1 Propiedades de la Transformada de Fourier 71
C2 Optimizacioacuten de la Transformada de Fourier 73
7
IacuteNDICE GENERAL IacuteNDICE GENERAL
8
Lista de Figuras
41 Controles en modo graacutefico del Trigger 39
42 Coordenadas de los puntos del ROI 42
43 ROI de barrido de la imagen 43
44 Parrilla de RBIrsquos que cubren la imagen 44
45 RBIrsquos candidatos a placa de matriacutecula 49
46 Los dos mejores candidatos 49
47 Resultado de imagen binarizada 52
48 Representacioacuten de poliliacuteneas 52
49 Aplicacioacuten de IPE con aacuterea igual a cero 53
410 Aplicacioacuten de IPE con aacuterea mayor que cero 54
411 Nueva zona de trabajo 55
412 Contornos maacutes cercanos al centro del ROI candidato 56
413 Contornos no deseados 57
414 Obtencioacuten de contornos final 58
415 Obtencioacuten de contornos ampliado 59
9
LISTA DE FIGURAS LISTA DE FIGURAS
10
Lista de Tablas
41 Tasas de fallo del clasificador 47
11
12 LISTA DE TABLAS
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

IacuteNDICE GENERAL IacuteNDICE GENERAL
321 Eleccioacuten del Lenguaje 32
322 QVision 33
323 Intelreg Integrated Perfomance Primitives IPP 34
324 QT Library 34
325 Octave 35
CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO 37
41 Estructura del Proyecto 37
42 Construccioacuten de viacutedeos de entrenamiento 38
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
44 Construccioacuten del clasificador 43
441 Generacioacuten del fichero de propiedades 43
442 Construccioacuten del clasificador en Octave 45
443 Aplicacioacuten del clasificador 47
45 Localizacioacuten de los diacutegitos de la matriacutecula 50
451 Binarizacioacuten de la imagen 50
452 Obtencioacuten del contorno de diacutegitos 55
453 OCR (Optical Character Recognition) 57
CAPIacuteTULO 5 CONCLUSIONES 63
51 Una vista atraacutes 63
52 Dificultades y limitaciones 63
53 Viacuteas futuras 64
54 Objetivos cumplidos 64
CAPIacuteTULO A MANUAL DE USUARIO 67
A1 Ejecucioacuten del programa 67
CAPIacuteTULO B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN 69
B1 Meacutetodo basado en bordes 69
6
IacuteNDICE GENERAL IacuteNDICE GENERAL
B2 Buacutesqueda iterativa 70
B3 Media 70
B4 Maacuteximo y miacutenimo 70
B5 Otras teacutecnicas 70
CAPIacuteTULO C TRANSFORMADA DE FOURIER 71
C1 Propiedades de la Transformada de Fourier 71
C2 Optimizacioacuten de la Transformada de Fourier 73
7
IacuteNDICE GENERAL IacuteNDICE GENERAL
8
Lista de Figuras
41 Controles en modo graacutefico del Trigger 39
42 Coordenadas de los puntos del ROI 42
43 ROI de barrido de la imagen 43
44 Parrilla de RBIrsquos que cubren la imagen 44
45 RBIrsquos candidatos a placa de matriacutecula 49
46 Los dos mejores candidatos 49
47 Resultado de imagen binarizada 52
48 Representacioacuten de poliliacuteneas 52
49 Aplicacioacuten de IPE con aacuterea igual a cero 53
410 Aplicacioacuten de IPE con aacuterea mayor que cero 54
411 Nueva zona de trabajo 55
412 Contornos maacutes cercanos al centro del ROI candidato 56
413 Contornos no deseados 57
414 Obtencioacuten de contornos final 58
415 Obtencioacuten de contornos ampliado 59
9
LISTA DE FIGURAS LISTA DE FIGURAS
10
Lista de Tablas
41 Tasas de fallo del clasificador 47
11
12 LISTA DE TABLAS
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
IacuteNDICE GENERAL IacuteNDICE GENERAL
B2 Buacutesqueda iterativa 70
B3 Media 70
B4 Maacuteximo y miacutenimo 70
B5 Otras teacutecnicas 70
CAPIacuteTULO C TRANSFORMADA DE FOURIER 71
C1 Propiedades de la Transformada de Fourier 71
C2 Optimizacioacuten de la Transformada de Fourier 73
7
IacuteNDICE GENERAL IacuteNDICE GENERAL
8
Lista de Figuras
41 Controles en modo graacutefico del Trigger 39
42 Coordenadas de los puntos del ROI 42
43 ROI de barrido de la imagen 43
44 Parrilla de RBIrsquos que cubren la imagen 44
45 RBIrsquos candidatos a placa de matriacutecula 49
46 Los dos mejores candidatos 49
47 Resultado de imagen binarizada 52
48 Representacioacuten de poliliacuteneas 52
49 Aplicacioacuten de IPE con aacuterea igual a cero 53
410 Aplicacioacuten de IPE con aacuterea mayor que cero 54
411 Nueva zona de trabajo 55
412 Contornos maacutes cercanos al centro del ROI candidato 56
413 Contornos no deseados 57
414 Obtencioacuten de contornos final 58
415 Obtencioacuten de contornos ampliado 59
9
LISTA DE FIGURAS LISTA DE FIGURAS
10
Lista de Tablas
41 Tasas de fallo del clasificador 47
11
12 LISTA DE TABLAS
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
IacuteNDICE GENERAL IacuteNDICE GENERAL
8
Lista de Figuras
41 Controles en modo graacutefico del Trigger 39
42 Coordenadas de los puntos del ROI 42
43 ROI de barrido de la imagen 43
44 Parrilla de RBIrsquos que cubren la imagen 44
45 RBIrsquos candidatos a placa de matriacutecula 49
46 Los dos mejores candidatos 49
47 Resultado de imagen binarizada 52
48 Representacioacuten de poliliacuteneas 52
49 Aplicacioacuten de IPE con aacuterea igual a cero 53
410 Aplicacioacuten de IPE con aacuterea mayor que cero 54
411 Nueva zona de trabajo 55
412 Contornos maacutes cercanos al centro del ROI candidato 56
413 Contornos no deseados 57
414 Obtencioacuten de contornos final 58
415 Obtencioacuten de contornos ampliado 59
9
LISTA DE FIGURAS LISTA DE FIGURAS
10
Lista de Tablas
41 Tasas de fallo del clasificador 47
11
12 LISTA DE TABLAS
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
Lista de Figuras
41 Controles en modo graacutefico del Trigger 39
42 Coordenadas de los puntos del ROI 42
43 ROI de barrido de la imagen 43
44 Parrilla de RBIrsquos que cubren la imagen 44
45 RBIrsquos candidatos a placa de matriacutecula 49
46 Los dos mejores candidatos 49
47 Resultado de imagen binarizada 52
48 Representacioacuten de poliliacuteneas 52
49 Aplicacioacuten de IPE con aacuterea igual a cero 53
410 Aplicacioacuten de IPE con aacuterea mayor que cero 54
411 Nueva zona de trabajo 55
412 Contornos maacutes cercanos al centro del ROI candidato 56
413 Contornos no deseados 57
414 Obtencioacuten de contornos final 58
415 Obtencioacuten de contornos ampliado 59
9
LISTA DE FIGURAS LISTA DE FIGURAS
10
Lista de Tablas
41 Tasas de fallo del clasificador 47
11
12 LISTA DE TABLAS
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

LISTA DE FIGURAS LISTA DE FIGURAS
10
Lista de Tablas
41 Tasas de fallo del clasificador 47
11
12 LISTA DE TABLAS
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

Lista de Tablas
41 Tasas de fallo del clasificador 47
11
12 LISTA DE TABLAS
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

12 LISTA DE TABLAS
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
1INTRODUCCIOacuteN Y REFERENCIAS
HISTOacuteRICAS
11 Introduccioacuten
El reconocimiento automaacutetico de placas de matriacuteculas (RAPM) mediante un sistema de
visioacuten artificial es un tema de indudable intereacutes comercial con numerosas aplicaciones como el
control de aparcamientos acceso a instalaciones tarificacioacuten de peajes caacutelculo de la velocidad
media entre puntos de una carretera etc
Los meacutetodos de reconocimiento toman una imagen fija (o una secuencia de ellas) localizan
en ella la placa que corresponde a la matriacutecula y proceden a la extraccioacuten y reconocimiento de
los caracteres que contiene
111 Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Arti-
ficial
Debido a la integracioacuten en masa de las tecnologiacuteas de la informacioacuten en todos los aspectos
de la vida moderna se produce la demanda de unos sistemas de informacioacuten para el proce-
13
14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

14 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
samiento de datos respecto a los vehiacuteculos
Estos sistemas necesitan que los datos sean archivados o bien por un humano o bien por
un equipo especial el cual es capaz de reconocer vehiacuteculos por sus matriacuteculas en un entorno y
tiempo real y reflejar estos hechos de la realidad en el sistema de informacioacuten
Por ello varias teacutecnicas de reconocimiento han sido desarrolladas y los sistemas de re-
conocimiento de placas de matriacuteculas son usados hoy en diacutea en multitud de aplicaciones de
traacutefico y seguridad tales como parkings control de acceso o seguimiento de vehiacuteculos robados
En los parkings el reconocimiento de las placas de matriacutecula es usado para calcular la du-
racioacuten en la que el coche ha estado aparcado Cuando un vehiacuteculo llega a la entrada del parking
el nuacutemero de matriacutecula de la placa es automaacuteticamente reconocido y almacenado en la base de
datos Cuando el vehiacuteculo maacutes tarde sale del parking y llega a la puerta de salida el nuacutemero de
matriacutecula de la placa es nuevamente reconocido y comparado con el primero almacenado en la
base de datos La diferencia de tiempo es usada para calcular el coste del aparcamiento
Los sistemas de reconocimiento automaacutetico de matriacuteculas pueden ser usados en control de
accesos Por ejemplo esta tecnologiacutea es usada en algunas compantildeiacuteas para conceder el acceso
solo a vehiacuteculos del personal autorizado
En algunos paiacuteses estos sistemas de reconocimiento estaacuten instalados a lo largo de un aacuterea
de la ciudad para detectar y monitorizar el traacutefico de vehiacuteculos Cada vehiacuteculo es registrado en
una base de datos central y por ejemplo se pueden comparar con una lista negra de vehiacuteculos
robados o controlar la congestioacuten en accesos a la ciudad en las horas punta como se ha comen-
tado antes
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
11 Introduccioacuten 15
112 Aspectos matemaacuteticos de los sistemas RAPM
En la mayoriacutea de los casos los vehiacuteculos estaacuten identificados por sus nuacutemeros de matriacutecula
los cuales son faacutecilmente legibles por humanos pero no por maacutequinas Para las maacutequinas un
nuacutemero de matriacutecula de una placa es simplemente una mancha oscura que se encuentra dentro
de una regioacuten de una imagen con una intensidad y luminosidad determinadas Debido a esto
es necesario disentildear un sistema matemaacutetico robusto capaz de percibir y extraer lo que deseamos
de la imagen capturada
Estas funciones o disentildeos matemaacuteticos estaacuten implementados en lo que se llaman en ingleacutes
rdquoANRP Systemsrdquo (Sistemas de Reconocimiento Automaacutetico de Placas de Matriacutecula) y signifi-
can una transformacioacuten entre el entorno real que se percibe y los sistemas de informacioacuten que
necesitamos para guardar y manejar toda esa informacioacuten
El disentildeo de estos sistemas es uno de de los campos de investigacioacuten en aacutereas como la
Inteligencia Artificial la Visioacuten por Computador el Reconocimiento de Patrones y las Redes
Neuronales
113 Aspectos fiacutesicos en los sistemas RAPM
Los sistemas de reconocimiento automaacutetico de placas de matriacuteculas son conjuntos de hard-
ware y software que procesan una sentildeal que se convierte en una representacioacuten graacutefica tal como
imaacutegenes estaacuteticas o secuencias de ellas y reconocen los caracteres de la placa
El hardware baacutesico de estos sistemas es una caacutemara un procesador de imaacutegenes un cap-
turador de eventos de la caacutemara y una unidad de almacenamiento y comunicacioacuten En nuestro
proyecto nos hemos basado en viacutedeos con imaacutegenes de coches en los que podemos ver sus ma-
triacuteculas
Los viacutedeos han sido grabados en condiciones ambientales normales de diacutea e intentado eli-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
16 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
minar el mayor ruido posible en las imaacutegenes Lo ideal para condiciones extremas y con serios
problemas de visibilidad normal seriacutea de disponer de caacutemaras especiales preparadas para tal
actividad como las caacutemaras de infrarrojos que son mucho mejores para atacar estos propoacutesitos
y conseguir mejores resultados Esto es debido a que la iluminacioacuten por infrarrojos provoca la
reflexioacuten de la luz en la placa de matriacutecula que estaacute hecha de un material especial lo que provoca
una iluminacioacuten distinta en esa zona de la imagen con respecto al resto de la misma provocando
que sea maacutes faacutecil su deteccioacuten
12 Estado del arte
Un caso particular del uso de estos sistemas que estamos comentando es el implementado en
Londres para el control de la Tasa por Congestioacuten de la empresa Transport For London (TFL)
[4] y que cuenta con unas 250 caacutemaras a lo largo del aacuterea que delimita la zona de congestioacuten
Mediante este sistema se sabe los coches que han circulado y controlan el pago de las tasas
Se utilizan dos tipos de caacutemaras las que captan imaacutegenes en color y las que captan en blan-
co y negro Las primeras se utilizan para situar al vehiacuteculo en su contexto de alrededor mientras
que las segundas se utilizan para captar la matriacutecula del vehiacuteculo
Las imaacutegenes captadas se mandan de forma continua al sistema central que memoriza la
fecha y el instante en el que se captoacute la imagen Las imaacutegenes en color y en mono se almacenan
junto la fecha y hora como copia de seguridad por si se da el caso de necesitar comparar la
informacioacuten obtenida
Las imaacutegenes captadas que pertenecen a conductores fraudulentos se verifican de forma
manual en la base de datos y en caso de confirmarse el fraude se tramita la multa correspondi-
ente
Tambieacuten podemos encontrar un ejemplo similar para el control de la congestioacuten en la ciudad
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
12 Estado del arte 17
Noruega de Trondhein done se utiliza el reconocimiento automaacutetico de matriacuteculas para contro-
lar los vehiacuteculos que acceden a ciertas aacutereas de la ciudad y descontarles de su tarjeta electroacutenica
las tasas de circulacioacuten
Sistemas similares para el control de congestioacuten mediante reconocimiento automaacutetico de
matriacuteculas lo podemos encontrar tambieacuten en ciudades como Goterborg (Suecia) Copenague
(Dinamarca) Bristol (Reino Unido) Edimburgo (Escocia) Roma y Geacutenova (Italia) Helsinki
(Finlandia) Hong Kong y Singapur [2]
A pesar de existir software comercial el reconocimiento automaacutetico de matriacuteculas es un
tema que estaacute siendo muy investigado Los sistemas comerciales en uso en la actualidad pueden
obtener tasas de acierto superiores al 95 en entornos controlados En entornos en los que las
condiciones de iluminacioacuten no estaacuten controladas o variacutea el tamantildeo orientacioacuten o perspectiva de
la placa la tasa de acierto se reduce hasta el 75
En el reconocimiento automaacutetico de matriacuteculas podemos diferenciar dos fases
1 Localizacioacuten de la placa dentro de la imagen paso criacutetico para la posterior identificacioacuten
2 Reconocimiento y validacioacuten de los caracteres de la matriacutecula
Los meacutetodos para localizar la placa de la matriacutecula son variados Una primera aproximacioacuten
muy utilizada es la de realizar una buacutesqueda por liacuteneas de modo que se evaluacutea la posibilidad
de que cada liacutenea horizontal forme parte de la matriacutecula para posteriormente buscar una zona
de la imagen con una alta concentracioacuten de estas liacuteneas Una vez hecho esto se buscariacutean los
liacutemites laterales
Se pueden encontrar muchas variantes de esta teacutecnica como por ejemplo usando anaacutelisis
frecuencial en [1] o correlacioacuten maacutexima como en [6]
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
18 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
Otras teacutecnicas hacen uso de buacutesquedas bidimensionales en las que se extraen una serie de
caracteriacutesticas para cada piacutexel calculadas en funcioacuten de su entorno mediante gradientes densi-
dad etc Con estas propiedades se construye una red neuronal multicapa para decidir por cada
piacutexel si pertenece o no a la matriacutecula algo que podemos ver en [15] Encontraacutendonos tambieacuten
con Algoritmos Geneacuteticos como en [10] para la localizacioacuten de la matriacutecula y algoritmos que
usan operadores morfoloacutegicos como en [5]
Para la deteccioacuten y validacioacuten de los diacutegitos de la matriacutecula hay varios meacutetodos para segmen-
tar y reconocer caracteres En [6] se realiza una segmentacioacuten parcial para separar los diacutegitos de
la placa y despueacutes dividirlos seguacuten se van reconociendo Se suelen usar redes neuronales para
realizar este reconocimiento bien con los diacutegitos directamente o mediante una transformacioacuten
previa [15]
13 Organizacioacuten del documento
La documentacioacuten de este Proyecto de Fin de Carrera estaacute dividida en cinco secciones
principales La primera de ellas Introduccioacuten y Referencias histoacutericas tiene por objeto la con-
textualizacioacuten de la aplicacioacuten dentro del campo de la visioacuten por computador y la informaacutetica
graacutefica y se introducen problemas que surgen de forma breve y las teacutecnicas que podemos en-
contrar
La seccioacuten de Anaacutelisis de Objetivos comienza con un repaso sobre los elementos que son
objetivo de este proyecto y los que no lo son Tambieacuten define el plan de trabajo repartiendo en
fases el desarrollo de estos objetivos
En el capiacutetulo de Teacutecnicas y Herramientas se definen los meacutetodos de uso frecuente dentro
de todos los campos que tratamos y las herramientas que vamos a utilizar durante el desarrollo
del proyecto
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
13 Organizacioacuten del documento 19
El cuarto capiacutetulo se centra en el disentildeo y la resolucioacuten de la aplicacioacuten Abarca un comple-
to estudio del disentildeo e implementacioacuten
Para finalizar se incluye un capiacutetulo de Conclusiones resumiendo los objetivos cumplidos
y los logros alcanzados asiacute como las posibles viacuteas futuras que podriacutean seguirse a partir del
presente Proyecto de Fin de Carrera
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
20 CAPIacuteTULO 1 INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
2ANAacuteLISIS Y OBJETIVOS
21 Objetivos y alcance del proyecto
El objetivo del proyecto es desarrollar un sistema de reconocimiento de los diacutegitos de una
placa de matriacutecula de un automoacutevil utilizando para ello las teacutecnicas y herramientas que maacutes se
adapten a este propoacutesito y que permitan hacerlo de una manera faacutecil y coacutemoda
Maacutes concretamente los objetivos del proyecto son
Realizar a traveacutes de viacutedeos que contienen placas de matriacuteculas una base de viacutedeos de
prueba para entrenamiento utilizados para realizar el aprendizaje
Encontrar y estudiar un meacutetodo con resultados aceptables para la correcta localizacioacuten de
la zona de la placa de la matriacutecula
Construir un sistema que permita obtener los ROIrsquos de cada imagen mediante unas ciertas
condiciones y sus vectores de propiedades asociados
Crear un sistema de aprendizaje con la ayuda de la base de viacutedeos ya obtenida anterior-
mente en donde indicamos queacute es una posible matriacutecula y queacute no
Construir un clasificador que permita decidir si una zona de la imagen pertenece o no a
una posible regioacuten de la placa a partir del sistema anterior
21
22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

22 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
Generar un sistema que dada una posible regioacuten de la imagen donde puede encontrarse la
matriacutecula permita determinar los diacutegitos de la misma
Reconocer los diacutegitos de la matriacutecula que hemos extraiacutedo anteriormente mediante un
sistema OCR
22 Queacute no es objetivo del proyecto
Construir un sistema graacutefico para la visualizacioacuten de viacutedeos e imaacutegenes ya que esto viene
dado por el framework de QVision
Intentar localizar en la imagen dos o maacutes placas de matriacuteculas tan soacutelo nos limitaremos
a encontrar una
Optimizar y disminuir el tiempo de procesamiento
23 Plan de trabajo
El plan de trabajo se ha dividido en las siguientes fases
FASE 1
Estudio del modelo teoacuterico
Aprendizaje de QVision QT4 e IPP
FASE 2
Generacioacuten de los viacutedeos de entrenamiento a partir de unos dados
Generacioacuten de los viacutedeos de prueba que se utilizaraacuten en la fase de validacioacuten
FASE 3
Generacioacuten de los ficheros de ROIrsquos de cada uno de los viacutedeos
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
23 Plan de trabajo 23
Generacioacuten de los ficheros de propiedades de LBP asociados a los ROIrsquos anteriormente
obtenidos
FASE 4
Creacioacuten del clasificador con el lenguaje Octave
Integracioacuten del coacutedigo Octave en el sistema para utilizar externamente el clasificador
FASE 5
Eliminacioacuten de contornos no vaacutelidos dentro de la regioacuten de la posible imagen
Localizacioacuten de diacutegitos de la placa y su reconocimiento mediante OCR con Octave
FASE 6
Evaluacioacuten y validacioacuten
Documentacioacuten
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
24 CAPIacuteTULO 2 ANAacuteLISIS Y OBJETIVOS
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
3TEacuteCNICAS Y HERRAMIENTAS
UTILIZADAS
31 Teacutecnicas Utilizadas
El uso de las teacutecnicas y herramientas utilizadas que vamos a comentar en esta seccioacuten es
debido a la simplicidad y comodidad que nos proporcionan a la hora de realizar el sistema que
queremos construir y su faacutecil uso y rapidez
311 Local Binary Patterns (LBP)
La teacutecnica utilizada para la localizacioacuten de la zona de la placa de la matriacutecula es LBP (Local
Binary Patterns)
La teacutecnica LBP fue adoptada en sus comienzos para el reconocimiento y deteccioacuten de caras
y el reconocimiento de expresiones faciales con excelentes resultados siendo desarrollada maacutes
tarde como el primer meacutetodo para el reconocimiento de texturas usado en la deteccioacuten del
movimiento de objetos en tiempo real como lo publicado en [12]
25
26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

26 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Quizaacutes las propiedades maacutes importantes del operador LBP en aplicaciones del mundo real
es su tolerancia contra los cambios de iluminacioacuten e invarianza contra cambios de nivel de gris
y su simplicidad computacional que permite analizar imaacutegenes en configuraciones de tiempo
real
El operador de anaacutelisis de textura LBP estaacute definido como una medida invariante a la escala
de grises derivado de una definicioacuten general de la textura en una vecindad local La propuesta
original [8] comienza umbralizando una vecindad de P (Pgt1) piacutexeles espaciados en un radio R
(Rgt0) utilizando como umbral el valor del piacutexel del centro esto genera una vecindad binarizada
y por lo tanto un patroacuten que es interpretado como un nuacutemero binario B Si las coordenadas del
centro son (00) las coordenadas de los piacutexeles vecinos estaacuten dadas por
(minusR sen(2πp
P) R cos(
2πp
P)) (31)
De la foacutermula anterior se deduce una vecindad circular de los piacutexeles mencionados pero
para hacerlo maacutes faacutecil a la hora de los caacutelculos lo hacemos en forma de cuadriacutecula
Vamos a mostrar un ejemplo de como actuacutea este operador
5 4 3
4 3 1
2 0 3
rArr
1 1 1
1 X 0
0 0 1
lowast
1 2 4
128 X 8
64 32 16
=
1 2 4
128 X 0
0 0 16
LBP = 1 + 2 + 4 + 16 + 128 = 151
La presencia del patroacuten local B se registra en un histograma de ocurrencias H Vemos que
como mucho vamos a obtener 256 patrones distintos (de 0 a 255) dentro de cada caacutelculo de
LBP los cuales utilizaremos a la hora de construir el clasificador para discriminar matriacuteculas
dentro de la imagen
Es decir este operador etiqueta los piacutexeles de una imagen umbralizando una vecindad de
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
31 Teacutecnicas Utilizadas 27
3x3 respecto al valor del piacutexel central y considerando el resultado como un nuacutemero binario
Luego el histograma de las etiquetas puede utilizarse como descriptor de textura
Una variante de este operador es combinarlo con un operador de contraste Para guardar
informacioacuten sobre el contraste de la textura el valor LBP se combina con una simple medida
de contraste llamada C Este valor es calculado como la diferencia entre el promedio del nivel
de gris de todos aquellos piacutexeles a los que se les ha asignado un valor igual a 1 y aquellos a
los que se les ha asignado un valor igual a 0 como se puede ver seguacuten el modelo descrito en [14]
312 Clasificacioacuten mediante pseudoinversa
Para la clasificacioacuten utilizamos el meacutetodo de la pseudoinversa
Este meacutetodo de clasificacioacuten simple utiliza una matriz compuesta por vectores de propiedades
los cuales obtenemos mediante el operador LBP anteriormente comentado de 256 elementos
y el vector de clases a los que pertenece cada uno de los vectores anteriores para dar como
resultado un vector de pesos w
En el meacutetodo basado en la matriz pseudoinversa el vector de pesos se obtiene la siguiente
expresioacuten
w = X+c (32)
El vector c es un vector de dimensioacuten m y los elementos cj son las salidas esperadas para ca-
da muestra del conjunto de aprendizaje o como antes lo hemos mencionado la clase La matriz
X+ es la denominada matriz pseudoinversa de X y que se obtiene a partir de la matriz X como
X+ = (XTX)minus1XT y los elementos de la matriz X son los propios vectores de propiedades
Por suerte haciendo uso del lenguaje Octave (325) que explicamos en secciones siguientes
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
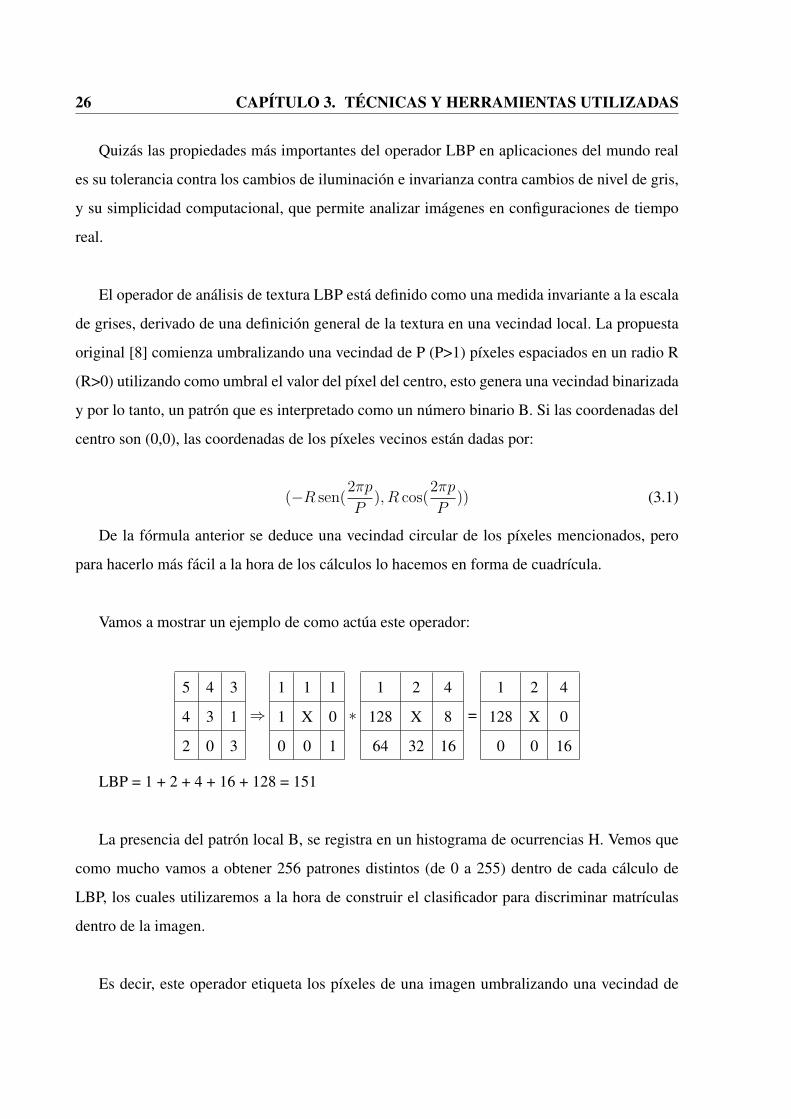
28 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
nos bastariacutea con usar la siguiente foacutermula
w = pinv(X) lowast c (33)
Pero existe una forma mucho maacutes raacutepida y eficiente para hacer el caacutelculo que nos devuelve
el mismo resultado mediante una operacioacuten de miacutenimos cuadrados y es de la siguiente manera
w = Xc (34)
para obtener el vector w de pesos [13]
La comparacioacuten en tiempo de ejecucioacuten de las dos instrucciones anteriores es de 7 veces
maacutes raacutepido la ejecucioacuten con rdquordquo que con rdquopinvrdquo
313 Obtencioacuten de los vectores de propiedades
Aunque entraremos con maacutes en detalle en el capiacutetulo de anaacutelisis y resolucioacuten vamos a co-
mentar brevemente como obtenemos esos vectores de propiedades que son necesarios para el
clasificador
Sobre la imagen construimos una parrilla de ROIrsquos (Regioacuten Of Interest) de un tamantildeo de
200x50 piacutexeles separados 25 piacutexeles cada uno tanto en x como en y Para cada uno de esos
ROIrsquos aplicamos el operador LBP (311) que nos daraacute el vector de propiedades de 256 valores
obteniendo una cantidad considerable de vectores por cada imagen a estudiar con los que cons-
truiremos la matriz para obtener la pseudoinversa y obtener el vector w de pesos asociados
El motivo de usar estos tamantildeos para trabajar es debido a que tras hacer las pertinentes
pruebas se generaba una cantidad considerable de muestras de vectores de propiedades LBP
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
31 Teacutecnicas Utilizadas 29
con las que conseguiriacuteamos mejores resultados Cuanta maacutes informacioacuten tengamos para el en-
trenamiento mejor resultado daraacute el clasificador
Estamos hablando del orden de unos 25000 vectores de propiedades que utilizamos para
entrenar el clasificador y del orden de 460 vectores de propiedades por frame procesado
314 Obtencioacuten del contorno de los diacutegitos
Una vez localizada la zona de la posible placa de matriacutecula hemos de obtener los contornos
de los diacutegitos que la componen
Para ello la teacutecnica que se ha seguido es la siguiente
Se binariza la imagen utilizando funciones para tal efecto de la libreriacutea IPP (323) la cual
calcula automaacuteticamente un umbral h de binarizado poniendo a valor 0 los piacutexeles menores
que ese umbral h y a 255 los mayores a ese umbral
La teacutecnica que sigue es la propuesta por Otsu la cual explicamos en el siguiente subaparta-
do (315)
Tras eso y tambieacuten mediante funciones propias de QVision (322) y la libreriacutea IPP (323)
obtendremos los contornos alrededor de las zonas negras quedaacutendonos soacutelo con los bordes ex-
ternos
Eliminamos todas las regiones obtenidas que sean muy pequentildeas o demasiado grandes Para
hacer esta discriminacioacuten se utiliza una teacutecnica que explicamos en el capiacutetulo de rdquoDisentildeo y Re-
solucioacutenrdquo y que consiste baacutesicamente en obtener los dos contornos maacutes cercanos al centro del
ROI que nos indica la regioacuten de la placa que en teoriacutea y seguacuten se ha comprobado suele coincidir
con el centro de la placa de la matriacutecula
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
30 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Se calcula el alto y ancho maacuteximo de cada una de estas dos siluetas con un margen antildeadido
y se elimina todo lo que esteacute fuera de esos liacutemites
315 Teacutecnica de binarizacioacuten de Otsu
Una de las teacutecnicas maacutes sencillas en segmentacioacuten es la umbralizacioacuten Dentro de eacutesta aacuterea
encontramos varios algoritmos como los mencionados en el Anexo B pero el que mejor resul-
tados obtiene y el que vamos a utilizar en la resolucioacuten del proyecto es el meacutetodo Otsu ([9] [11])
Si entendemos una imagen como una funcioacuten de dos dimensiones f(x y) = G Donde G
estaraacute en el rango [0256] Los piacutexeles con valor de gris se representan como fi y el nuacutemero de
piacutexeles como N La probabilidad de ocurrencia seraacute
pi =fiN
(35)
Si solo hay dos niveles se llama binarizacioacuten en esta caso los piacutexeles son divididos en
dos clases C1 con niveles de gris [1 t] y C2 [t+1 256] Entonces la distribucioacuten de
probabilidad de los niveles de gris para las dos clases son
C1 =p1
ω1(t)
ptω1(t)
(36)
C2 =pt+1
ω2(t)
p256
ω2(t)(37)
donde
ω1(t) =tsumi=1
pi (38)
ω2(t) =256sumi=t+1
pi (39)
Y la media para C1 y C2 son
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
31 Teacutecnicas Utilizadas 31
micro1 =tsumi=1
i middot piω1(t)
(310)
micro2 =256sumi=t+1
i middot piω2(t)
(311)
Si definimos microT como la intensidad media de toda la imagen Se demuestra que
ω1 middot micro1 + ω2 middot micro2 = microT (312)
ω1 + ω2 = 1 (313)
Otsu [9] definioacute la variancia (medida de la dispersioacuten de valores en este caso se trata de la
dispersioacuten de los niveles de gris) entre clases de una imagen umbralizada como
σ2B = ω1 middot (micro1 minus microT )2 + ω2 middot (micro2 minus microT )2 (314)
para calcular el valor umbral de forma que la dispersioacuten dentro de cada segmento sea lo maacutes
pequentildea posible pero al mismo tiempo la dispersioacuten sea lo maacutes alta posible entre segmentos
diferentes
Para dos niveles el umbral oacuteptimo tlowast se elige de manera que σ2B sea maacutexima
tlowast = Maximo(σ2B(t)) (315)
Traducido esto sobre las imaacutegenes y en forma de pseudocoacutedigo el algoritmo trabajariacutea de la
siguiente manera
1 Calculamos el valor del piacutexel mayor y del menor
2 Obtenemos el histograma de la imagen
3 Calculamos la Csum como xF(x) para x = 0 hasta 255
donde x es el iacutendice y F(x) su valor
4 Calculamos N = F(x) para x = 0 hasta 255
32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

32 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
5 Para todos los valores del histograma
51 N1 = F(x) Sumatorio desde cero hasta el iacutendice actual
52 N2 = N - N1
53 Sum = xf(x) sumatorio valor histograma de cero hasta
el iacutendice actual
54 M1 = CsumN1
55 M2 = (Sum-Csum)N2
56 b = N1N2(M1 - M2)(M1 - M2)
6 Nos quedamos con el iacutendice del mayor Sb
La importancia del meacutetodo de Otsu radica en que es automaacutetico es decir no necesita super-
visioacuten humana ni informacioacuten previa de la imagen antes de su procesamiento
32 Herramientas Utilizadas
321 Eleccioacuten del Lenguaje
La eleccioacuten del lenguaje a usar veniacutea ya impuesta por el hecho de tener que realizar el
Proyecto con el framework QVision (322) del cual hablaremos con maacutes detalle en las si-
guientes secciones por lo que la mayoriacutea de la praacutectica ha sido realizada con el lenguaje de
programacioacuten C++
C++ es un lenguaje imperativo orientado a objetos de propoacutesito general basado en C al que
se han antildeadido nuevos tipos de datos clases plantillas mecanismo de excepciones sistema de
espacios de nombres funciones inline sobrecarga de operadores referencias operadores para
manejo de memoria persistente y algunas utilidades adicionales de libreriacutea
Entre las caracteriacutesticas de este lenguaje encontramos
Programacioacuten orientada a objetos La posibilidad de orientar la programacioacuten a objetos per-
mite al programador disentildear aplicaciones desde un punto de vista maacutes cercano a la vida
32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

32 Herramientas Utilizadas 33
real Ademaacutes permite la reutilizacioacuten del coacutedigo de una manera maacutes loacutegica y productiva
Portabilidad Un coacutedigo escrito en C++ puede ser compilado en casi todo tipo de ordenadores
y sistemas operativos sin hacer apenas cambios
Brevedad El coacutedigo escrito en C++ es muy corto en comparacioacuten con otros lenguajes sobre
todo porque en este lenguaje es preferible el uso de caracteres especiales que las palabras
clave
Programacioacuten modular Un cuerpo de aplicacioacuten en C puede estar hecho con varios ficheros
de coacutedigo fuente que son compilados por separado y despueacutes unidos Ademaacutes esta ca-
racteriacutestica permite unir coacutedigo en C con coacutedigo producido en otros lenguajes de progra-
macioacuten como Ensamblador o el propio C
Velocidad El coacutedigo resultante de una compilacioacuten en C++ es muy eficiente gracias a su ca-
pacidad de actuar como lenguaje de alto y bajo nivel
Es una extensioacuten del lenguaje C que ha experimentado una mejora considerable y un eacutexito
en las aplicaciones ya que muchos sistemas operativos compiladores e inteacuterpretes han sido
escritos en C++ (el propio Windows y Java)
322 QVision
La herramienta base de este proyecto es QVision un framework de prototipado raacutepido de
aplicaciones graacuteficas de proceso de imagen desarrollado por el departamento de Ingenieriacutea y
Tecnologiacutea de Computadores (DiTEC) y usado por el Departamento de Informaacutetica y Sis-
temas (DIS) dentro del Grupo de Investigacioacuten rdquoPercepcioacuten Artificial y Reconocimiento de
Patronesrdquo(PARP) de la Facultad de Informaacutetica de la Universidad de Murcia
De las caracteriacutesticas maacutes importantes de QVision podemos resaltar las siguientes
Eficiencia computacional al estar basado en IPP QT4 y OpenGL
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
34 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
Versatilidad en fuentes de imagen al estar basado en MPlayer y MEncoder Caacutemaras
USB Firewire DV tarjetas de TV viacutedeos con casi cualquier codec DVDs rtsp http
imaacutegenes jpgpnm
Paralelismo multihilo para CPUs multicore
QVision estaacute desarrollado sobre la libreriacutea QT en la que entraremos maacutes en detalle en su
seccioacuten (324)
323 Intelreg Integrated Perfomance Primitives IPP
Las rdquoIntelreg Integrated Perfomance Primitivesrdquo (IPP) es un conjunto de libreriacuteas de Intel que
implementan diferentes funciones de procesamiento de imaacutegenes Estaacute optimizada para proce-
sadores de Intel aunque funcionan con cualquier procesador compatible con Pentium
En QVision podemos encontrar el Paquete QVIPP que contiene funciones de procesamiento
de imagen a bajo nivel y que estaacute basado en las libreriacuteas IPP de Intel
Baacutesicamente estaacute disentildeado como un rdquoC++ wrapperrdquo de las IPP ofreciendo funciones anaacutelo-
gas en nombre y utilidad a las de esta libreriacutea implementando las funciones maacutes comunes
siendo faacutecilmente ampliable con nuevas seguacuten se van necesitando
324 QT Library
Qt es una amplia plataforma de desarrollo que incluye clases libreriacuteas y herramientas para
la produccioacuten de aplicaciones de interfaz graacutefica en C++ que pueden operar en varias platafor-
mas
Baacutesicamente es un conjunto de clases en C++ que nos permitiraacuten utilizar elementos baacutesicos
como Listas Rectaacutengulos Poliliacuteneas etc de una manera raacutepida y eficaz
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
32 Herramientas Utilizadas 35
325 Octave
GNU Octave es un lenguaje de alto nivel inicialmente pensado para la computacioacuten numeacuteri-
ca
Octave tiene una gran cantidad de herramientas para resolver problemas de aacutelgebra numeacuteri-
ca comunes encontrar las soluciones de ecuaciones no lineales realizar integrales de funciones
ordinarias manipular polinomios e integrar ecuaciones diferenciales ordinarias y ecuaciones
diferenciales algebraicas Es faacutecil de extender y modificar a traveacutes de funciones definidas por el
usuario escritas en el propio lenguaje de Octave o utilizando moacutedulos cargados dinaacutemicamente
escritos en otros lenguajes como C C++ Fortran etc
Para nuestro propoacutesito Octave nos construye un clasificador para la fase de aprendizaje de
la localizacioacuten de la zona de la placa de la matriacutecula y posteriormente lo usaremos a la hora de
generar el sistema OCR para la deteccioacuten y clasificacioacuten de los diacutegitos de la matriacutecula
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
36 CAPIacuteTULO 3 TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
4DISENtildeO Y RESOLUCIOacuteN DEL
PROYECTO
41 Estructura del Proyecto
El proyecto quedariacutea divido en varios moacutedulos para mayor simplicidad Vamos a ir vieacutendo-
los
El primer moacutedulo consistiriacutea en la generacioacuten de los viacutedeos que vamos a utilizar para la fase
de aprendizaje Se podriacutea haber utilizado directamente estos viacutedeos pero para maacutes comodidad
los hemos modificado un poco Es baacutesicamente un capturador de frames para hacer viacutedeos con
los frames que deseemos de otros viacutedeos
El segundo moacutedulo consiste en la generacioacuten de los ficheros que contienen los ROIrsquos que
encierran la zona de la placa de la matriacutecula y que nos serviraacuten posteriormente para entrenar el
clasificador indicando queacute es una zona de placa y queacute no
El tercer moacutedulo es para obtener el fichero con los vectores de propiedades (313) mediante
el operador LBP (311) con los que se construiraacute el clasificador y en el que se hace uso de los
ROIrsquos anteriormente obtenidos que indican la zona de la matriacutecula
37
38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

38 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
El cuarto moacutedulo una vez construido el clasificador y obtenido el vector de pesos w se
encarga de obtener el ROI que mejor define la zona de la placa de la matriacutecula haciendo uso del
clasificador
El uacuteltimo moacutedulo consiste en obtener los contornos de los diacutegitos de la placa de la matriacutecula
apoyaacutendonos en el ROI obtenido anteriormente y que si todo ha ido correcto deberaacute estar enci-
ma o muy cerca de la matriacutecula y posteriormente el reconocimiento de los mismos (453)
42 Construccioacuten de viacutedeos de entrenamiento
En el servidor de httpperceptioninfumes podemos encontrar una serie de
viacutedeos que contienen secuencias de imaacutegenes con vehiacuteculos en los que se ve perfectamente la
placa de la matriacutecula Unos viacutedeos han sido tomados desde la izquierda y otros desde la derecha
y grabados a 30 frames por segundo
Para el proyecto nos bastaba con tomar un frame de cada posible matriacutecula para construir el
clasificador ya que de un frame a otro de una misma matriacutecula apenas se apreciaba diferencia
y seriacutea tener informacioacuten sobrante
Por ello se pensoacute en automatizar la captura de frames de viacutedeos para poder construir clasi-
ficadores utilizando cualquier viacutedeo que deseemos utilizar
Construido bajo QVision (322) como casi todos los demaacutes moacutedulos eacuteste contiene un tri-
gger el cual se activa pulsando el botoacuten de rdquoGuardar Framerdquo y al dispararse captura el frame
actual que se estaacute mostrando y lo inserta en otro viacutedeo que se estaacute generando internamente
el cual es el obtenido al final y con el que trabajaremos maacutes adelante Podemos ver esto en la
imagen 41
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
42 Construccioacuten de viacutedeos de entrenamiento 39
Figura 41 Controles en modo graacutefico del Trigger
Por defecto guarda el viacutedeo resultante con el nombre de rdquoFramesmpgrdquo y tiene un valor de
Frame Por Segundo (FPS) de 25 pero lo ideal seriacutea indicarle otro nombre para evitar proble-
mas si queremos generar maacutes de un viacutedeo y en nuestro caso y para nuestro uso lo que hemos
utilizado para generar los viacutedeos es usar un valor de FPS de 1
Cabe destacar tambieacuten que independientemente del formato de entrada y el tamantildeo los
viacutedeos se van a guardar siempre con un tamantildeo de 720 piacutexeles de ancho por 576 piacutexeles de alto
que seraacuten las dimensiones con las que trabajaremos a lo largo de todo el desarrollo del proyecto
El nuacutemero de FPS puede ser cambiado en tiempo de ejecucioacuten del programa posteriormente
y puede variar entre 1 y 25 frames por segundo
El formato de salida del viacutedeo creado es YUV4MPEG2 el cual estaacute disentildeado para contener
frames no comprimidos de viacutedeo YCbCr formateado como datos YCbCr 420 YCbCr 422
o YCbCr 444 cuyo propoacutesito es codificar como en MPEG-2 Sobre las siglas rdquoYUVrdquo en su
nombre esto deriva de que el espacio de color YCbCr es confundido con el espacio de color
YUV usado en aplicaciones basadas en formato PAL como televisioacuten analoacutegica y cintas de
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
40 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
viacutedeo
YCbCr es un espacio de color utilizado en sistemas de fotografiacutea y viacutedeo digital y define el
color en teacuterminos de un componente de luminancia y dos de crominancia
Y representa la luminancia y se encuentra en el rango de 0 a 255
Cb y Cr representan la crominancia los colores azul y rojo respectivamente Se encuen-
tran en el rango -128 a 127 con signo oacute 0 a 255 sin signo
Hemos de antildeadirle para la correcta creacioacuten del viacutedeo la cabecera de YUV4MPEG2 si-
guiendo la siguiente instruccioacuten
bool writeYUV4MPEG2Header( QFile ampfile
const int cols
const int rows
const int fps
)
la cual tiene los siguientes paraacutemetros
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
cols El nuacutemero de columnas que el viacutedeo deberiacutea tener
rows El nuacutemero de filas que el viacutedeo deberiacutea tener
fps El nuacutemero de frames por segundo que tendraacute la secuencia de viacutedeo
Para insertar los distintos frames que componen el viacutedeo utilizamos la siguiente instruccioacuten
de QVision (322)
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
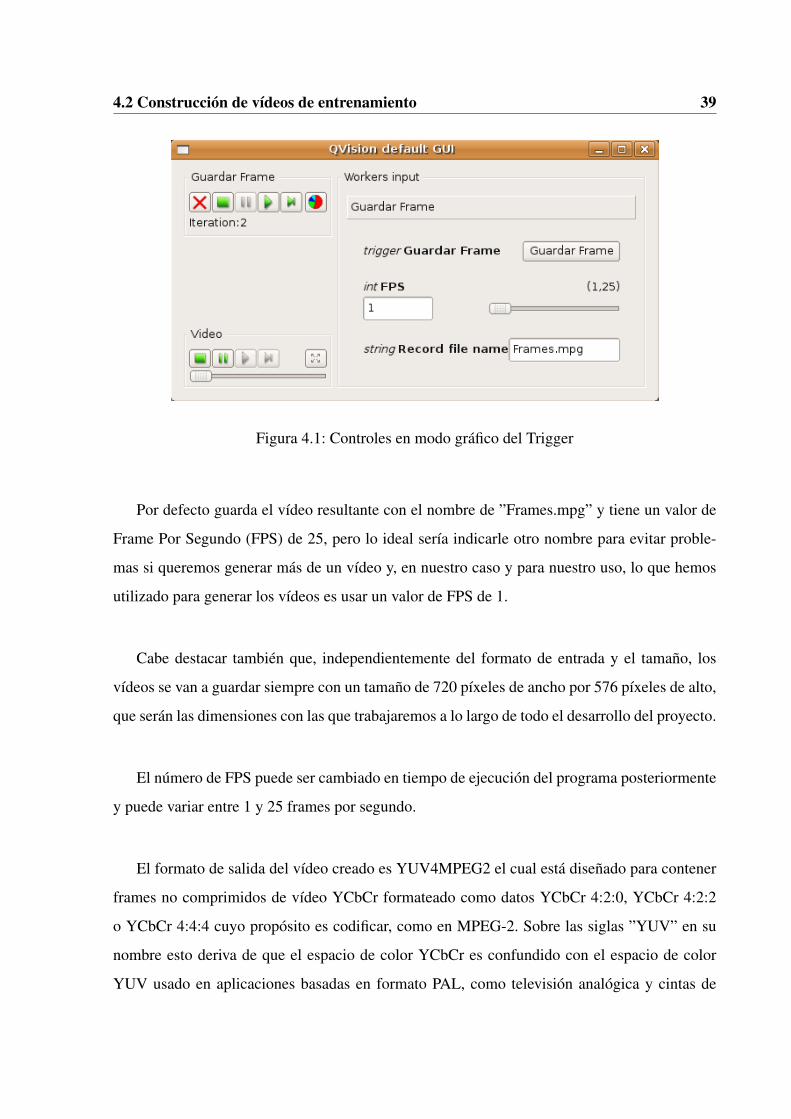
43 Obtencioacuten de los ROIrsquos de las matriacuteculas 41
bool writeYUV4MPEG2Frame( QFile ampfile
const QVImagelt uChar 3 gt imageRGB
)
y que en este caso tiene la siguiente entrada
file Objeto que apunta al fichero de viacutedeo Debe estar previamente creado y abierto cuando
recibe los argumentos de la creacioacuten de la cabecera
imageRGB El objeto de imagen RGB a almacenar en el viacutedeo
43 Obtencioacuten de los ROIrsquos de las matriacuteculas
Una vez hemos obtenido los viacutedeos anteriores para el entrenamiento y el aprendizaje hemos
de obtener el ROI donde se encuentra la matriacutecula para implementar el clasificador posterior-
mente
Puede haber viacutedeos en la web para estos propoacutesitos pero queriacuteamos construir esta herrami-
enta de etiquetado de ROIs para nuestro uso
Este proceso de obtencioacuten de los ROIrsquos es manual y lo uacutenico que hacemos es ir mostrando
las imaacutegenes que forman el viacutedeo seleccionamos del menuacute de herramientas del entorno graacutefico
de QVision (322) la opcioacuten de seleccionar ROI y marcamos la zona de la matriacutecula para en-
cuadrarla en un rectaacutengulo de borde de color rojo
Una vez creado el ROI al pasar de imagen se guarda automaacuteticamente en un fichero que
por defecto se llamaraacute rdquofileROIrdquo y que deberiacuteamos de darle un nombre al invocar al programa
para no confundirnos despueacutes
Este fichero tendraacute una liacutenea por cada imagen que contenga el viacutedeo y seguiraacute el siguiente
formato
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
42 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
ROI r1 r2 c1 c2
Los valores de estos paraacutemetros de salida son los siguientes
r1 Valor del piacutexel en la imagen de la coordenada y de la esquina superior izquierda del ROI
r2 Valor del piacutexel en la imagen de la coordenada y de la esquina inferior derecha del ROI
c1 Valor del piacutexel en la imagen de la coordenada x de la esquina superior izquierda del ROI
c2 Valor del piacutexel en la imagen de la coordenada x de la esquina inferior derecha del ROI
como bien queda descrito en la imagen 42
Figura 42 Coordenadas de los puntos del ROI
Para uno de los viacutedeos de entrenamiento podemos encontrarnos con un fichero de ROIrsquos
como el que sigue
ROI 140 270 167 419
ROI 277 407 368 646
ROI 284 361 3 174
ROI 306 392 200 470
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
44 Construccioacuten del clasificador 43
44 Construccioacuten del clasificador
441 Generacioacuten del fichero de propiedades
En esta primera parte de la construccioacuten del clasificador necesitamos generar el fichero de
propiedades mediante el operador LBP
Para ello por cada imagen o frame de los viacutedeos de entrenamiento hacemos lo siguiente
Se construye un ROI que llamaremos rdquoROI de barrido de la imagenrdquo (RBI) Este RBI tiene
un tamantildeo predefinido de 200 piacutexeles de ancho y 50 piacutexeles de alto Estas dimensiones han sido
establecidas con estos valores para poder obtener un nuacutemero considerable de muestras en la
imagen que a la hora de hacer el clasificador ajustaraacuten mejor los resultados obtenidos
Como vemos en la siguiente imagen (43) ese es el RBI que se obtiene en color blanco el
cual partiendo de la posicioacuten superior izquierda va a ir desplazaacutendose por filas y columnas con
un salto de 25 piacutexeles en el eje x cuando se arrastra por la fila y un salto de 25 piacutexeles en el eje
y cuando tiene que saltar a la siguiente fila Estos valores tienen que ver con lo explicado antes
para obtener un nuacutemero considerable de muestras en cada imagen
Figura 43 ROI de barrido de la imagen
Al final se obtendriacutea una parrilla de RBIrsquos como la mostrada en la figura 44
Ahora para cada RBI que obtenemos en la imagen le aplicamos el operador LBP (311)
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
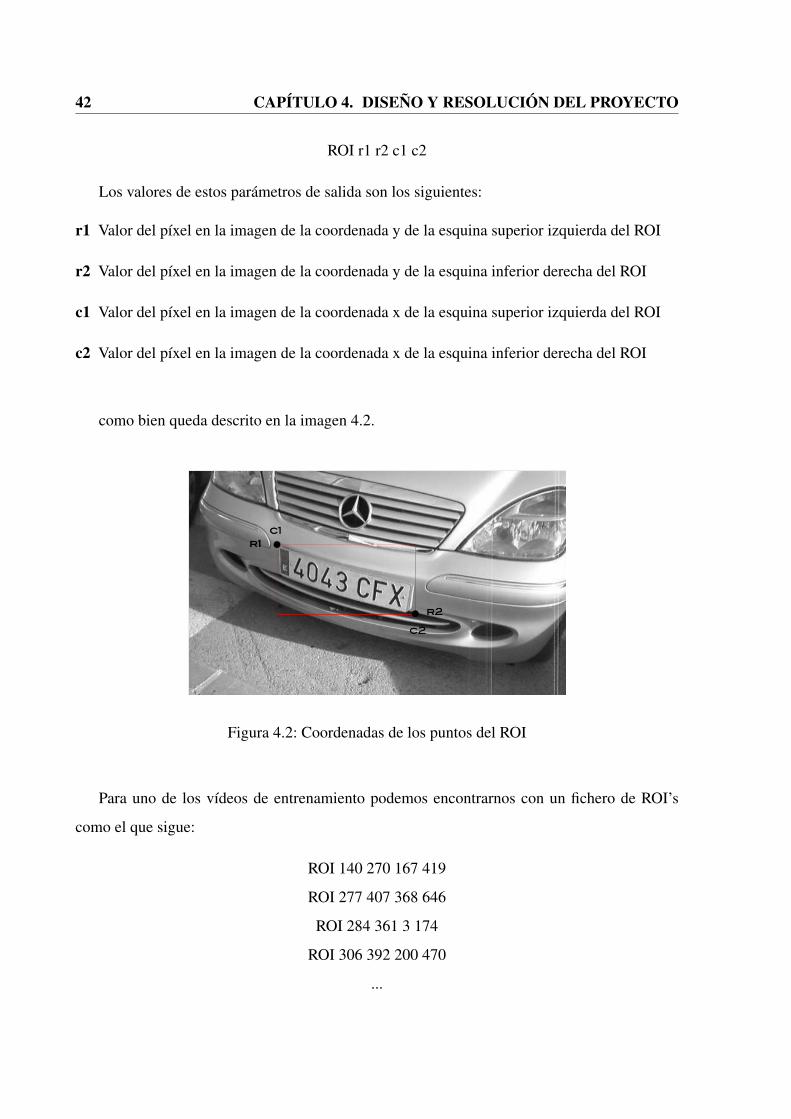
44 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 44 Parrilla de RBIrsquos que cubren la imagen
para obtener sus propiedades pero etiquetando cada vector de propiedades con un label que
tendraacute valor -1 o 1 dependiendo de
Si el RBI no intersecciona absolutamente en ninguacuten punto con el ROI de la matriacutecula calcu-
lado anteriormente y almacenado en el fichero de ROIrsquos de ese viacutedeo el RBI quedaraacute etiquetado
a rdquo-1rdquo indicando esto que es una muestra no vaacutelida en la que no se encuentra la matriacutecula
Por el contrario si el RBI intersecciona con el ROI tenemos dos posibles opciones
Si el RBI intersecciona con el ROI como mucho en un valor rdquomin_discrdquo que es el dis-
criminante miacutenimo el cual por defecto estaacute establecido a un valor del 10 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo-1rdquo indicando que no es una
muestra vaacutelida No tenemos suficiente informacioacuten con tan soacutelo un 10 de los piacutexeles que in-
terseccionan para saber si es una zona de la posible placa o no
El otro caso es que el RBI interseccione en al menos un valor rdquomax_discrdquo que es el dis-
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
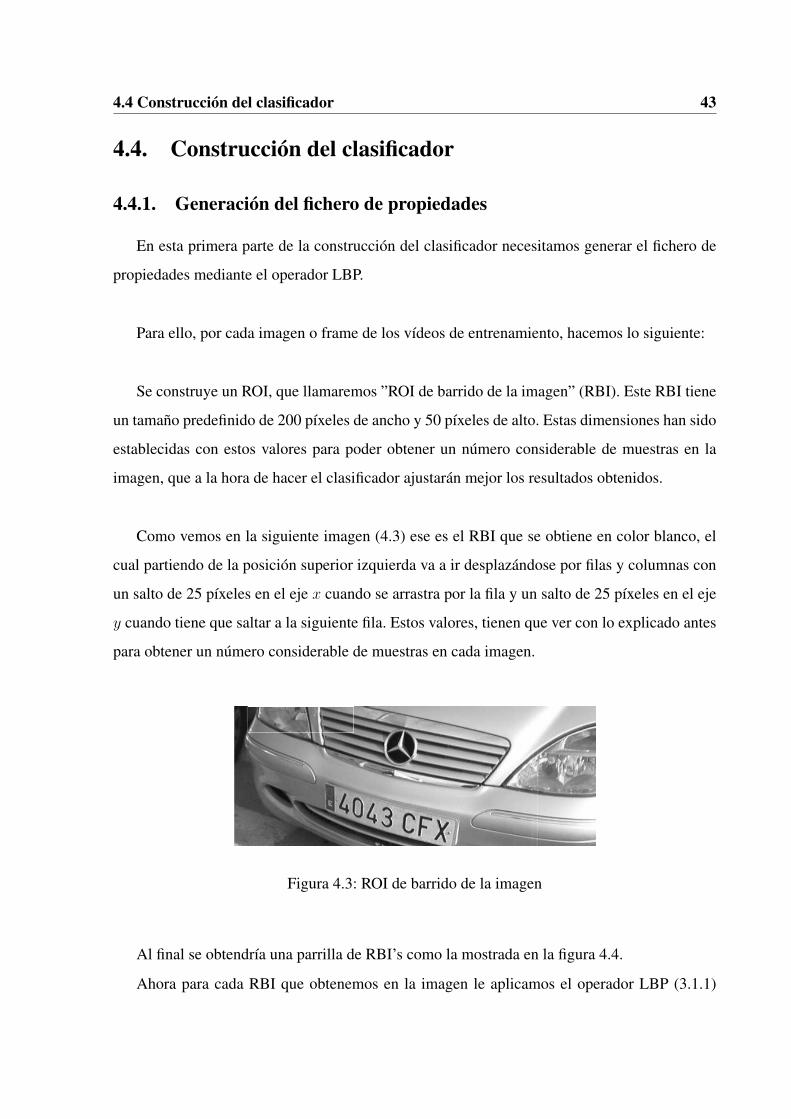
44 Construccioacuten del clasificador 45
criminante maacuteximo el cual por defecto estaacute establecido a un valor del 60 este vector de
propiedades LBP (311) asociado al RBI quedaraacute etiquetado a rdquo1rdquo indicando que puede ser un
posible candidato a una zona de la placa de la matriacutecula
Los demaacutes RBI que quedan entre rdquomin_discrdquo y rdquomax_discrdquo quedariacutean sin etiquetar y sin
aplicarles el operador LBP (311) debido a que no tenemos suficiente informacioacuten para saber
si es o no un posible candidato a placa de matriacutecula en la imagen pudiendo crear incongruen-
cias en el clasificador y empeorar los resultados
Estos dos paraacutemetros discriminantes estaacuten parametrizados en el sistema pudiendo darles el
valor que deseemos pero realizando los tests sobre el clasificador los predefinidos son los que
han dado un mejor resultado
Como muestra de ejemplo vemos el resultado de aplicar el operador LBP (311) al primer
RBI de la esquina superior izquierda de la imagen anteriormente mostrada
606 53 68 84 40 3 83 343 148 75 3 153 22 4 19 283 156 7 3 20 96 5 200 511 10 0 1 3 2 3 5 63 33 6
6 1 5 0 13 9 84 164 7 147 7 6 7 115 14 0 0 1 6 0 6 21 5 0 0 1 5 9 8 35 78 8 6 3 6 0 1 1 1 10 0 3 0 0 0 0 6 0
0 0 6 0 5 2 0 0 0 0 1 0 0 0 76 5 1 4 9 0 3 10 164 599 2 58 10 16 8 54 10 0 0 0 12 0 7 12 0 2 0 1 7 16 1 12
51 9 8 10 1 0 4 7 12 7 0 13 1 0 0 11 99 6 12 14 186 3 742 158 7 1 1 4 4 2 1 28 2 0 0 0 0 0 0 1 1 10 0 3 0 1
0 6 4 0 0 0 10 1 21 4 2 5 0 3 6 10 6 58 79 17 0 7 0 1 7 4 14 13 0 5 0 0 0 4 151 6 1 2 101 2 60 43 3 4 0 0 3
3 1 11 446 10 1 8 13 0 5 68 392 145 1 41 11 5 11 123 405 8 2 10 137 3 39 126 58 31 0 13 38 62 14 151
442 Construccioacuten del clasificador en Octave
Nuestro rdquoProblema de Clasificacioacutenrdquo viene dado por el hecho de que el sistema emite pares
(x c) seguacuten lo explicado anteriormente donde x isin R es el vector de propiedades (313) de LBP
(311) y c isin -11 indica la clase (positiva o negativa) a la que realmente pertenece
El objetivo es predecir la clase c de futuros vectores de propiedades x procedentes de
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
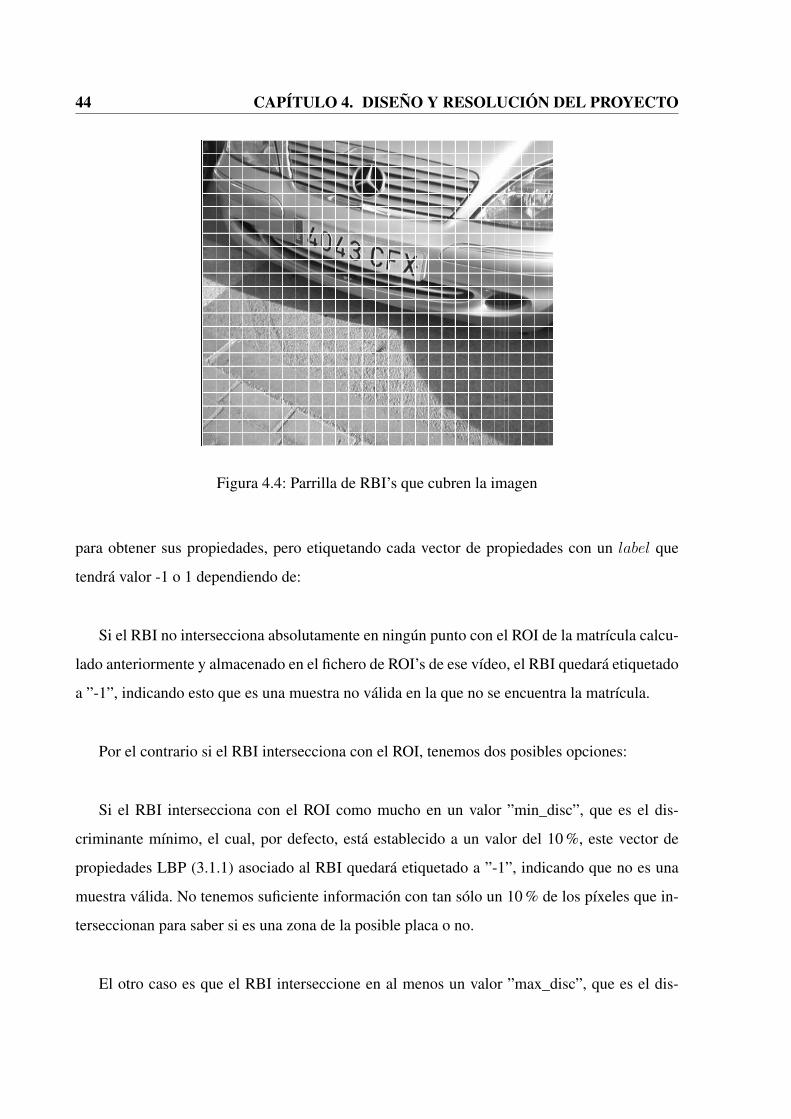
46 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
cualquier otro viacutedeo con el menor error posible a la hora de clasificar
Dado el problema de clasificacioacuten necesitamos de una rdquoFuncioacuten de Decisioacutenrdquo definida por
f Rn rarr R (41)
la cual es un procedimiento matemaacuteticoalgoriacutetmico que trata de distinguir dos tipos de objetos
Si f(x) gt 0 el objeto x se clasifica como rdquopositivordquo (c = +1) y si f(x) lt 0 se clasifica como
rdquonegativordquo (c = minus1) Los puntos que cumplen f(x) = 0 constituyen la hipersuperficie frontera
entre las dos regiones de decisioacuten
Como en nuestro caso hemos hecho pruebas con unos cinco ficheros de propiedades de
cinco viacutedeos distintos para elegir cual seriacutea el mejor conjunto de entrenamiento hemos juntado
los ficheros de cuatro en cuatro y usado como prueba el fichero que no usamos en cada caso
para ver que tasa de error se obteniacutea
Esto es para estimar la probabilidad de error mediante la teacutecnica conocida como rdquoLeave N
outrdquo
Estamos usando un clasificador simple que usa el meacutetodo de la pseudoinversa (312) para
calcular el vector de pesos w ya explicado en el capiacutetulo de Teacutecnicas y Herramientas utilizadas
(312) la funcioacuten de decisioacuten usando los vectores de propiedades x y el vector de peses w seraacute
fw(x) = w middot x = w1x1 + + + wnxn (42)
Cada propiedad xi se multiplica por su correspondiente coeficiente wi y se suman todos los
teacuterminos Intuitivamente la magnitud de cada peso indica la importancia relativa del atributo
correspondiente y su signo determina si contribuye a favor o en contra de la decisioacuten positiva
c = +1
En lugar de usar un teacutermino independientew0 expliacutecito que es necesario para que la frontera
pueda separarse del origen de coordenadas a veces es preferible conseguir el mismo efecto
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
44 Construccioacuten del clasificador 47
antildeadiendo a todos los vectores de propiedades una constante (por ejemplo 1) incluyendo asiacute a
w0 dentro de w
w middot x+ w0 = (w0 w1 w2 wn)(1 x1 x2 xn) (43)
De las pruebas antes mencionadas con los cinco ficheros de cinco viacutedeos con placas de
matriacuteculas que se grabaron para realizar el proyecto se obtuvieron las siguientes tasas de error
ENTRENAMIENTO PRUEBA TASA DE ERROR( )
Fichero 1234 5 226
Fichero 2345 1 542
Fichero 3451 2 085
Fichero 4512 3 094
Error Medio 235
Tabla 41 Tasas de fallo del clasificador
Podemos esperar que el error usando todos los vectores de propiedades de los cinco ficheros
estaraacute en torno al 235
443 Aplicacioacuten del clasificador
Generado ya nuestro vector de pesosw lo vamos a guardar en un fichero llamado rdquowvaluesrdquo
y que seraacute el que utilicemos a la hora de clasificar cualquier viacutedeo con matriacuteculas
Para cada imagen o frame del viacutedeo que queremos clasificar volvemos a construir el ROI
de barrido mencionado la seccioacuten de rdquoGeneracioacuten del fichero de propiedadesrdquo (441) Este RBI
lo vamos a ir desplazando con el mismo desplazamiento de 25 piacutexeles en el eje x y 25 piacutexeles
en el eje y y a cada RBI le aplicamos el operador LBP (311) generado para cada imagen un
conjunto de vectores de propiedades que vamos a guardar en un fichero
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
48 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Generado este fichero con todos los vectores de propiedades de cada RBI le toca el turno al
entorno Octave(325)
La integracioacuten del entorno Octave (325) en nuestro programa basado en QVision (322) lo
hemos hecho directamente mediante una llamada al sistema que se encarga de ejecutar Octave
(325) mediante fichero de texto que contiene la orden a ejecutar
En el programa Octave(325) hecho para la clasificacioacuten comprobamos que existe el fichero
de pesos w en caso negativo generaraacute uno y sino utilizaraacute el que encuentre en el directorio de
trabajo Esto se comprueba debido a que el clasificador lleva un tiempo en generarse y si ya lo
tenemos preparado nos ahorramos volver a generar el clasificador
Ahora coge el fichero anteriormente generado con los vectores de propiedades y le aplica a
cada vector x el vector de pesos w para calcular la clase asociada a cada vector La aplicacioacuten
de la operacioacuten wx da como resultado un valor positivo o negativo que nos vamos a guardar
tambieacuten en un fichero aparte y que llamaremos rdquovaloresCrdquo
El siguiente paso es usar el fichero de clases llamado rdquovaloresCrdquo para determinar cual es
el mejor RBI de los clasificados en nuestro caso el maacutes positivo o en su defecto (al no haber
ninguno positivo situacioacuten no deseable) el de mayor valor
En la imagen 45 obtenemos un conjunto de RBIrsquos candidatos a regioacuten de la placa de la
matriacutecula que han obtenido un valor mayor que 0 al aplicarle el clasificador
Es posible que al realizar la clasificacioacuten no obtengamos ninguacuten valor positivo como hemos
comentado antes pero nos quedamos igualmente con los dos RBIrsquos cuyos valores c son los dos
valores negativos maacutes rdquopositivosrdquo
Esta situacioacuten de no tener alguacuten candidato positivo podriacutea deberse al hecho de que no existe
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
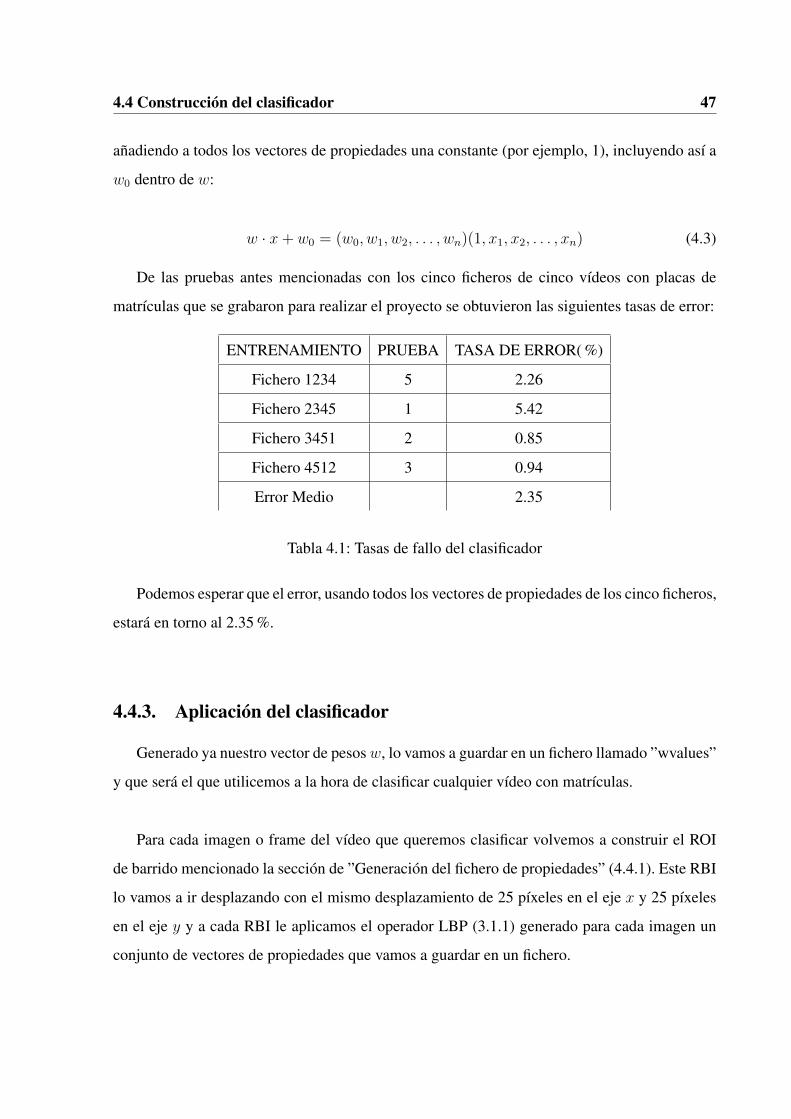
44 Construccioacuten del clasificador 49
Figura 45 RBIrsquos candidatos a placa de matriacutecula
ninguna placa de matriacutecula en la imagen
Si nos quedamos el que obtiene un mejor valor de c al hacer la clasificacioacuten obtenemos en
color rojo el mejor RBI y en amarillo el segundo mejor lo cual queda mostrado en la figura 46
Figura 46 Los dos mejores candidatos
Destacar que al finalizar esta parte tenemos por separado pero relacionados los siguientes
ficheros
Fichero con los RBI en el formato rdquoROI r1 r2 c1 c2rdquo
Fichero con los vectores de propiedades LBP de cada RBI
Fichero con la clase asociada a cada RBI calculada por el clasificador
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
50 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
45 Localizacioacuten de los diacutegitos de la matriacutecula
451 Binarizacioacuten de la imagen
Una vez aplicado el clasificador para localizar la posible situacioacuten de la placa de la matriacutecu-
la tenemos que localizar los diacutegitos que la componen
Para esta tarea primeramente vamos a binarizar la imagen es decir la vamos a poner en
blanco (255) y negro (0) Para ello utilizamos funciones propias de IPP que permiten obtener el
umbral asociado a una imagen mediante el meacutetodo Otsu que ya comentamos 315
void ComputeThreshold_Otsu(
QVImageltuChar1gt image
uChar pThreshold
)
teniendo los siguientes paraacutemetros
image Imagen sobre la que queremos calcular el umbral
pThreshold Variable en la que se guardaraacute el valor del umbral
Resaltar que el valor soacutelo se calcula la zona de la imaacutegen donde se encuentra el ROI candida-
to a zona de matriacutecula lo cual nos daraacute un mejor resultado del umbral consiguiendo diferenciar
mucho mejor la zona de los diacutegitos de cualquier otra zona de la imagen completa
Obtenido este valor podemos pasar a binarizar la imagen cosa que haremos utilizando otra
funcioacuten de las IPP (323) que mostramos a continuacioacuten
void Threshold_LTValGTVal(
QVImageltuChar1gt origen
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
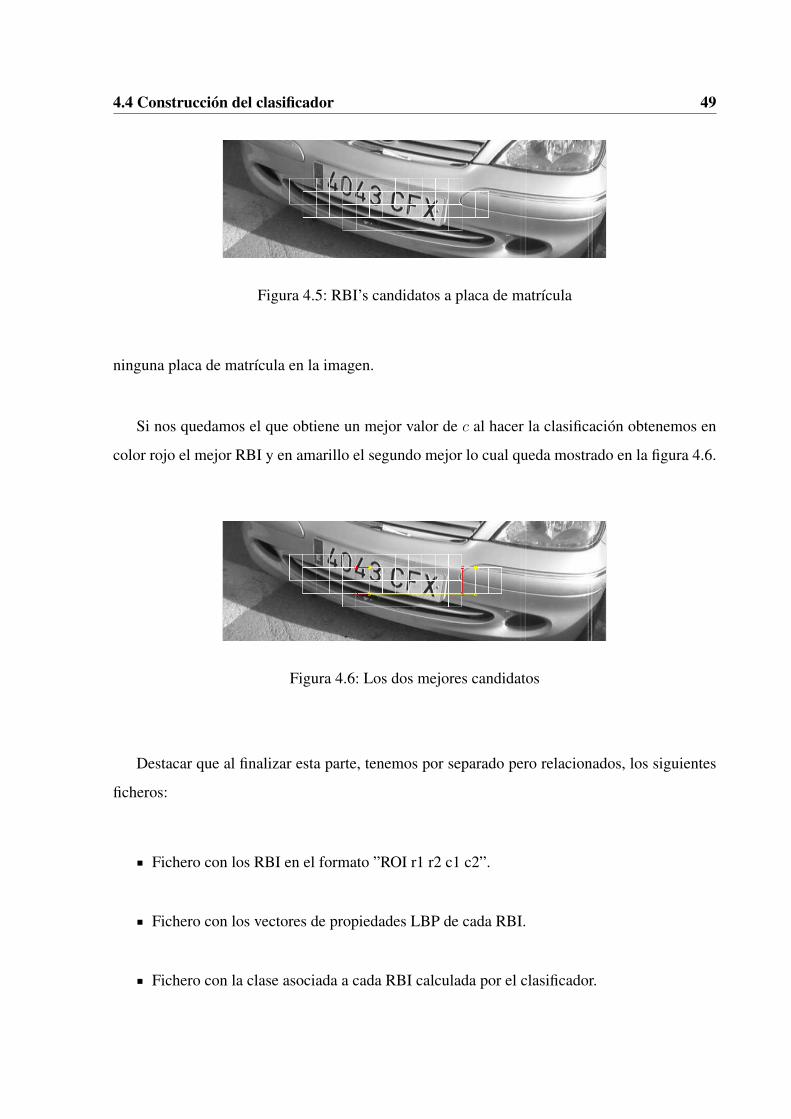
45 Localizacioacuten de los diacutegitos de la matriacutecula 51
QVImageltuChar1gt destino
uChar pThreshold
int value1
uChar pThreshold
int value2)
que utiliza los siguientes paraacutemetros
origen Imagen sobre la que vamos a binarizar
destino Imagen resultante binarizada
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value1 Valor al que pondremos la imagen y que esteacute por debajo del valor pThreshold
pThreshold Umbral que hemos obtenido anteriormente para binarizar
value2 Valor al que pondremos la imagen y que esteacute por encima del valor pThreshold
Ya tenemos binarizada la matriacutecula hecho importante para poder obtener de forma correcta
o al menos maacutes coacutemodamente los contornos que componen la imagen La imagen binarizada
(con un valor pThreshold de rdquo132rdquo) quedariacutea de la siguiente manera en la figura 47
Para obtener estos contornos volvemos a la libreriacutea IPP (323) con la que obtendremos una
lista de poliliacuteneas cada una de las cuales se corresponde a un contorno de la imagen y viene
dada por
QListltQVPolylinegt getConnectedSetBorderContoursThreshold(
QVImageltuChar1gt image
uChar pThreshold
)
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
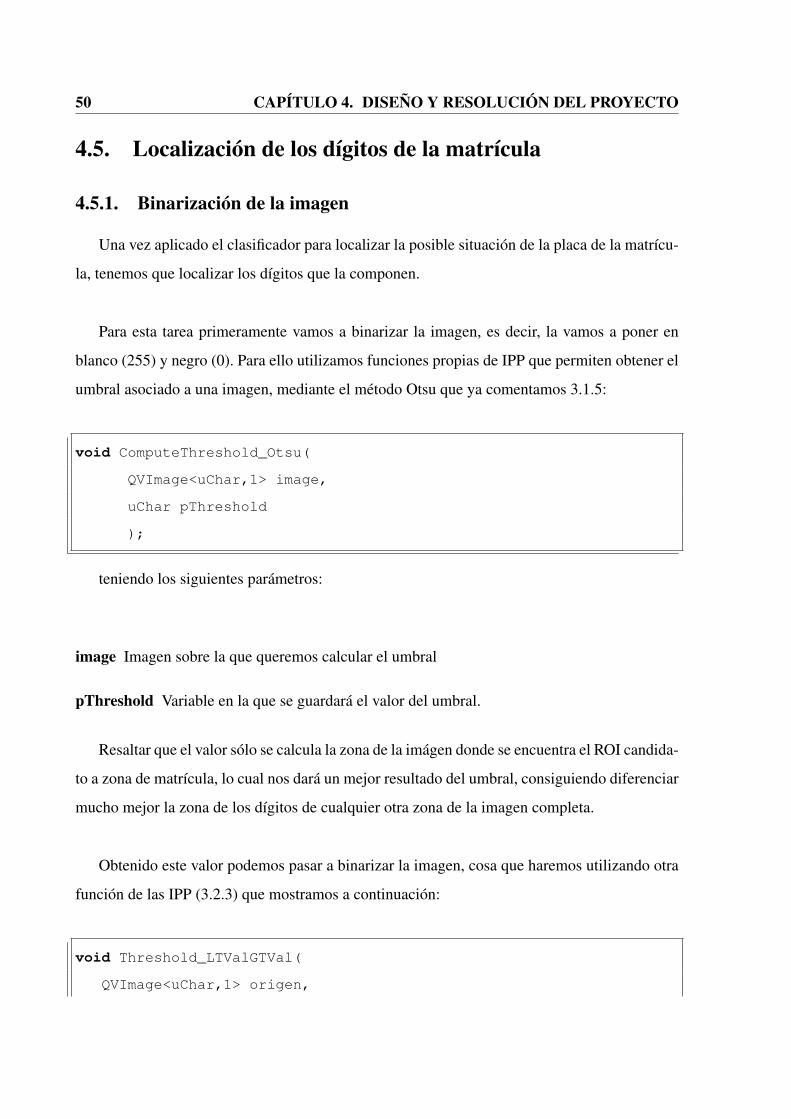
52 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 47 Resultado de imagen binarizada
La representacioacuten como poliliacutenea permite obtener cualquier propiedad geomeacutetrica de las
figuras de la imagen sin excesivo coste computacional
Un ejemplo de poliliacutenea sobre la matriacutecula anterior seriacutea como el mostrado en la figura 48
Figura 48 Representacioacuten de poliliacuteneas
A veces interesa reducir el tamantildeo de un contorno eliminando puntos alineados y convir-
tieacutendolo en una poliliacutenea con una forma aproximadamente igual a la del contorno original El
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
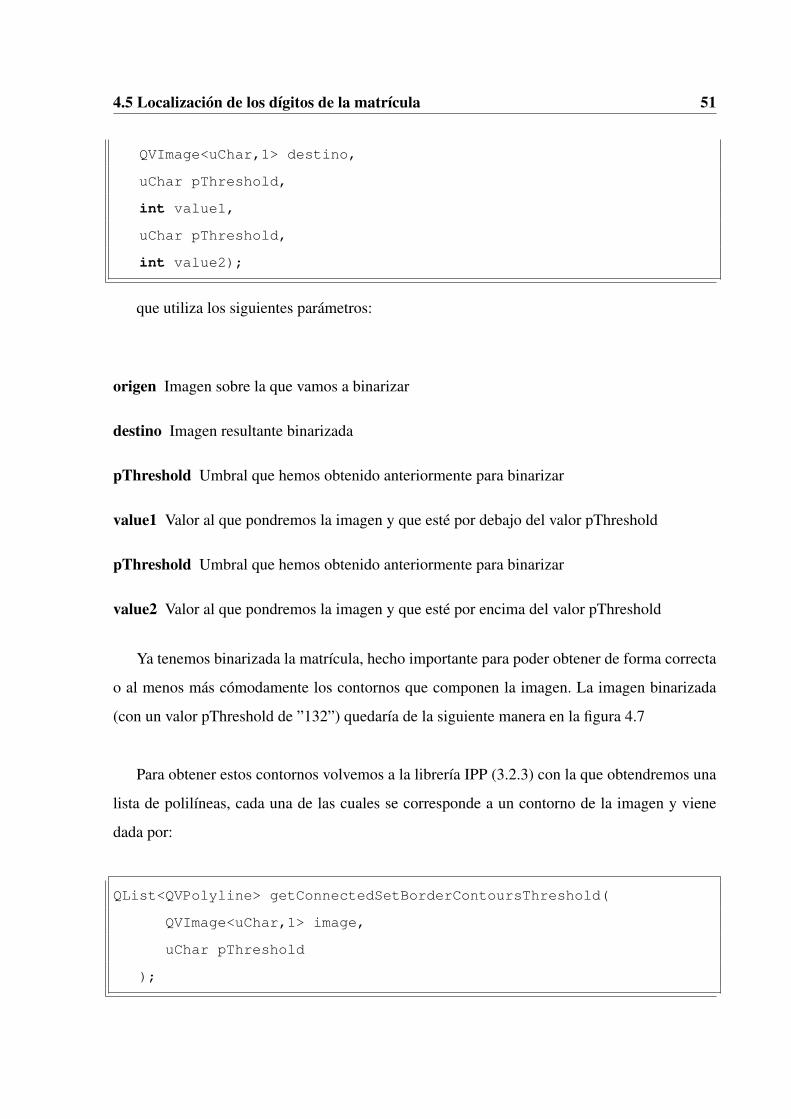
45 Localizacioacuten de los diacutegitos de la matriacutecula 53
algoritmo IPE (Iterative Point Elimination) resuelve este problema y es el que aplicamos tam-
bieacuten en el programa y que nos ofrece el framework de QVision
La idea es calcular el aacuterea de error del triaacutengulo (perdido o ganado) al eliminar cada uno
de los puntos del contorno Se elimina el punto que genere menos error se recalculan sus dos
vecinos y se repite el proceso Cuando la eliminacioacuten de cualquier punto produzca un triaacutengulo
de error inaceptable detenemos el proceso
Con el paraacutemetro rdquoMinAreaIPErdquo podemos ajustar eacutesta aacuterea aunque se recomienda utilizar
un valor de 0 para obtener mejores resultados ya que sino el contorno se deforma a medida que
aumentamos eacutesta aacuterea Aparte de esto se lleva un control del nuacutemero de puntos de cada con-
torno para que no sea ni muy pequentildeo ni muy grande ya que es improbable que ahiacute se encuentre
un diacutegito de matriacutecula
Con un valor de 0 para el paraacutemetro MinAreaIPE obtenemos la figura 49
Figura 49 Aplicacioacuten de IPE con aacuterea igual a cero
algo muy diferente a si aplicamos un valor mayor de 0 para el aacuterea que quedariacutea como en
la figura 410
Una vez tenemos la lista de poliliacuteneas correctamente formada nos quedamos soacutelo con los
contornos externos de cualquier objeto desechando los internos que no nos interesan
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
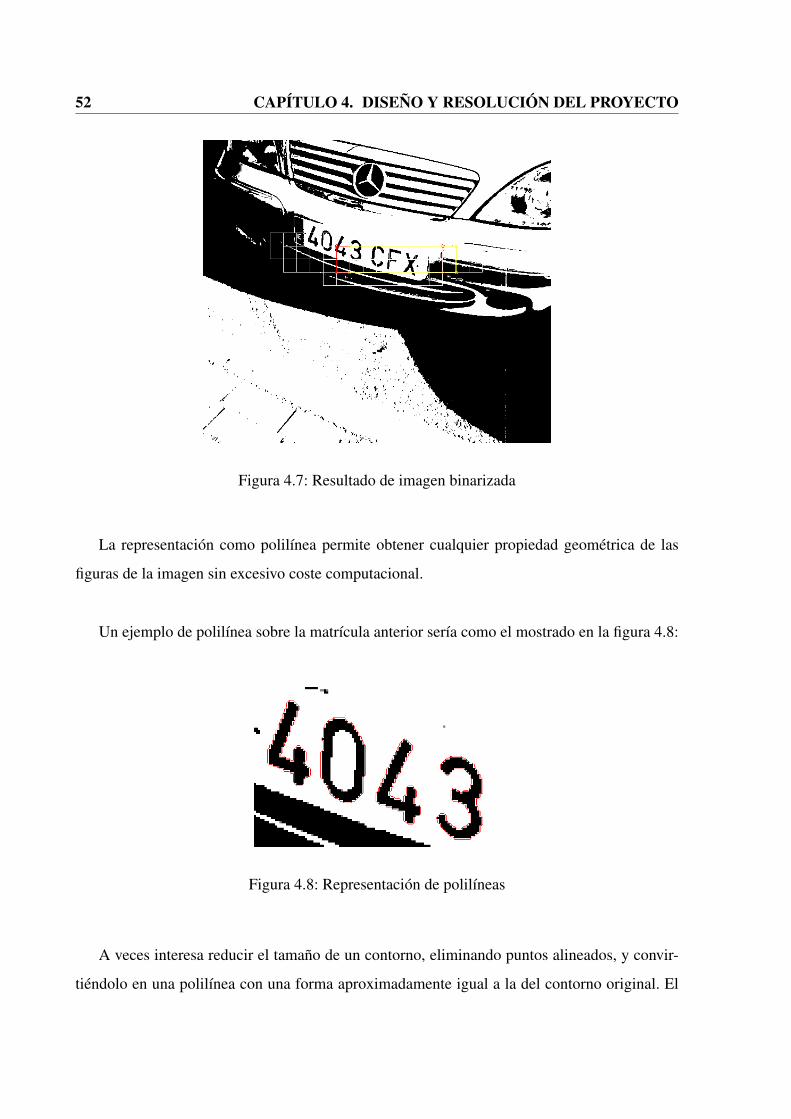
54 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 410 Aplicacioacuten de IPE con aacuterea mayor que cero
Un dato importante que no hemos comentado auacuten es que el sistema desconoce totalmente
queacute tamantildeo tiene la posible placa de la matriacutecula No sabe a priori cuales son sus dimensiones
la uacutenica informacioacuten de la que dispone es de un ROI cercano a ella con lo que no sabe que
tamantildeo tienen tampoco los diacutegitos que la componen Hay que implementar alguacuten discriminador
de contornos para obtener los diacutegitos
El ROI que obtenemos del clasificador tiene unas dimensiones de 200x50 y en la mayoriacutea
de los casos suele estar sobre la zona de la matriacutecula casi centrado con ella Por ello la decisioacuten
que se ha tomado ha sido utilizar como regioacuten de trabajo a la hora de obtener los contornos
anteriores tan soacutelo la regioacuten que centrada en el ROI obtenido como el mejor candidato tiene
una altura de tres veces la del ROI y de ancho toda la imagen
Con estas medidas nos aseguramos de no dejarnos ninguacuten elemento de intereacutes fuera de nues-
tra regioacuten de trabajo Pero vamos a afinar un poco maacutes esta regioacuten
Graacuteficamente la regioacuten o el nuevo ROI de trabajo sobre la imagen seraacute la mostrada en la
figura 411
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
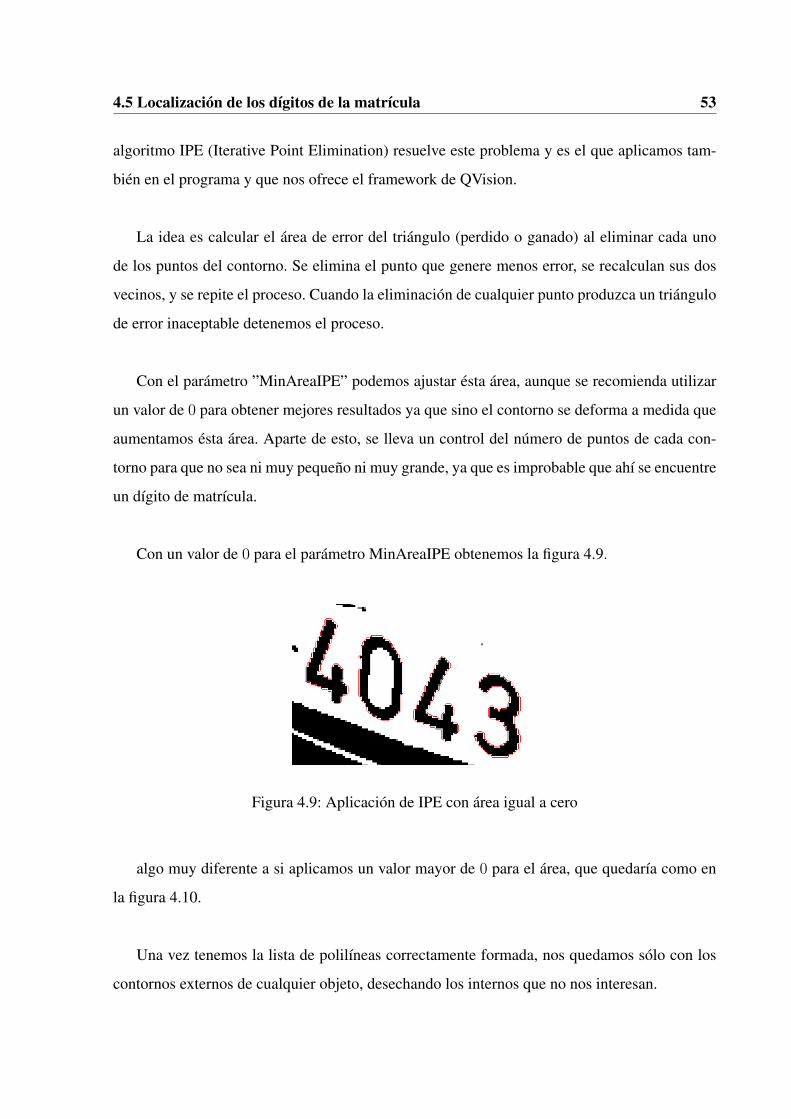
45 Localizacioacuten de los diacutegitos de la matriacutecula 55
Figura 411 Nueva zona de trabajo
452 Obtencioacuten del contorno de diacutegitos
Llegados a este punto lo que tenemos es una lista de contornos dados por poliliacuteneas pero
sin saber a queacute se corresponde cada una dentro de la imagen
Una manera de saber queacute poliliacutenea pertenece a cada contorno en la imagen binarizada es que
si partimos de lo comentado anteriormente de que el ROI candidato estaacute centrado en la zona
de la matriacutecula conocido este centro del ROI calculamos para cada poliliacutenea yendo punto a
punto cual se encuentra maacutes cercano a este centro del ROI
Calculadas todas las distancias nos quedamos con los dos contornos del aacuterea de trabajo
actual que maacutes cercanos se encuentren al centro Auacuten no sabemos queacute es un diacutegito y queacute no
por eso hay que seguir refinando un poco maacutes
Dados estos dos contornos calculamos sus dimensiones tanto el alto como el ancho Poste-
riormente nos quedamos con el ancho maacuteximo de cada uno de los contornos y el alto maacuteximo
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
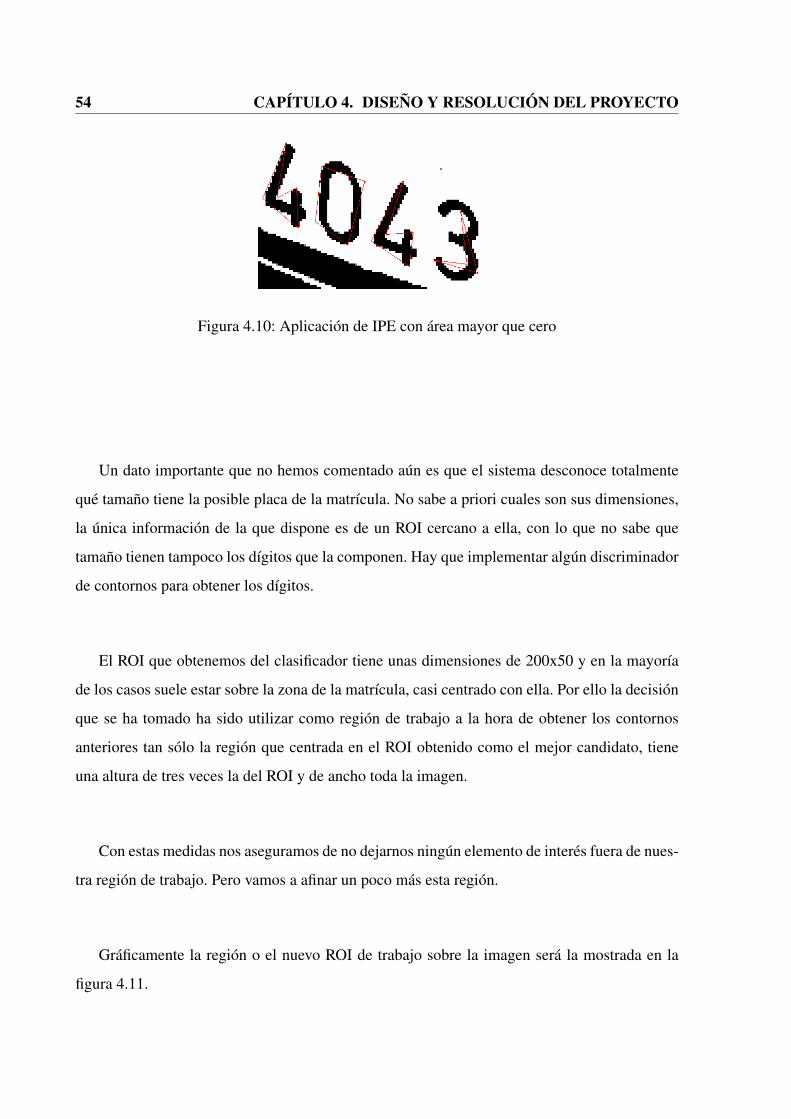
56 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
lo que nos va a permitir construir una rdquocajardquo de ciertas dimensiones que utilizaremos para dis-
criminar al resto de los contornos
En la imagen 412 se han recuadrado los dos contornos maacutes cercanos al centro c y de donde
obtendremos la anchura y altura maacutexima
Figura 412 Contornos maacutes cercanos al centro del ROI candidato
Deacutemonos cuenta de que no todos los diacutegitos van a tener las mismas dimensiones en la ma-
triacutecula debido a la rotacioacuten de la placa de la matriacutecula en la imagen o ruido que se ha eliminado
anteriormente y que dificulte ver correctamente alguacuten diacutegito o su tamantildeo original Esto nos lleva
al problema generado anteriormente con la regioacuten de trabajo donde se localizaba la placa de la
matriacutecula
El discriminante de contornos va a consistir en que todos los contornos que sean maacutes pe-
quentildeos que un 90 de las dimensiones de la rdquocajardquo o mayores que un 110 de las dimensiones
de la rdquocajardquo queden excluidos y no se tengan en cuenta como diacutegitos candidatos de la placa de
la matriacutecula
Hecho esto deberiacutean quedarnos tan soacutelo los diacutegitos de la matriacutecula y puede que algunos
contornos que hayan superado la discriminacioacuten como por ejemplo la etiqueta de la Unioacuten Eu-
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
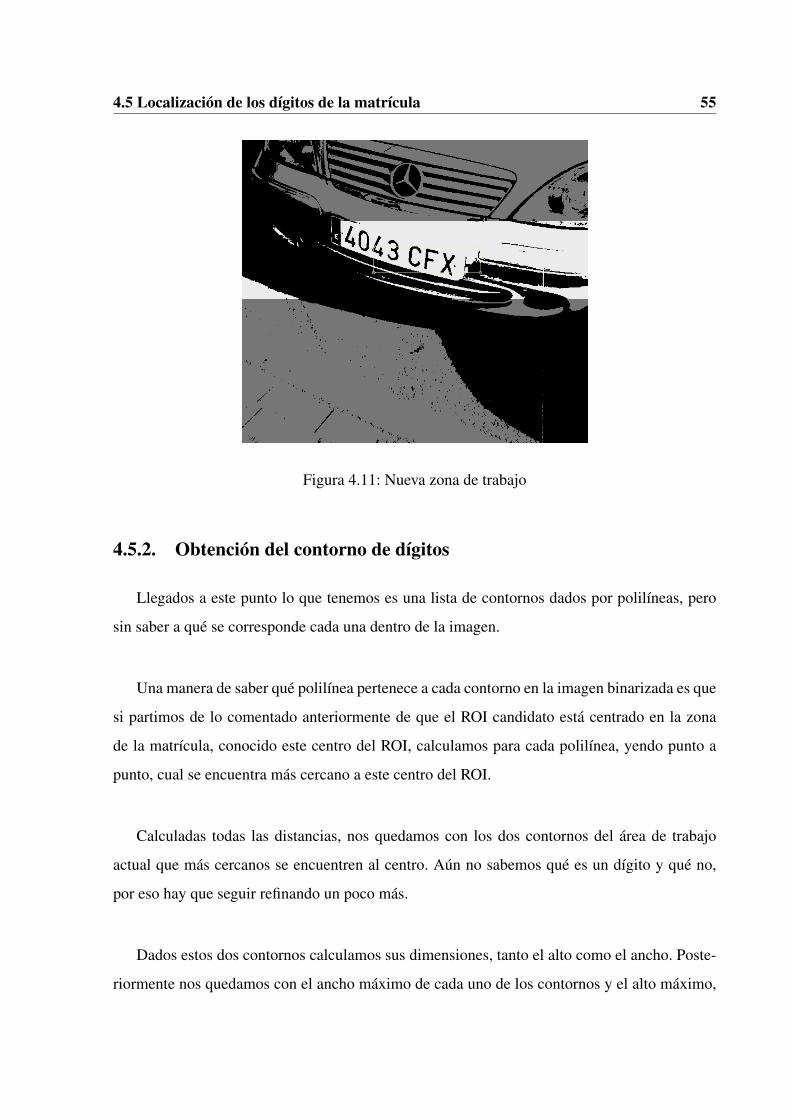
45 Localizacioacuten de los diacutegitos de la matriacutecula 57
ropea que suele acompantildear a los nuacutemeros de las matriacuteculas pero que no nos afectan
Este hecho lo podemos ver en la imagen 413
Figura 413 Contornos no deseados
Al final obtenemos una imagen como la de 414 para cada imagen del viacutedeo
o ampliado para maacutes detalle en la figura 415
453 OCR (Optical Character Recognition)
Llegado a este punto nos queda construir un reconocedor oacuteptico de caracteres rdquoOCRrdquo el
cual nos permitiraacute la clasificacioacuten de los contornos de diacutegitos obtenidos para obtener la matriacutecu-
la
El sistema seguido para construir este OCR es realizar un reconocedor de formas Esto no es
un problema trivial Si partimos de vectores de propiedades que son directamente los piacutexeles de
las imaacutegenes binarias que contienen las siluetas de las figuras la tarea de clasificacioacuten requeriraacute
conjuntos de aprendizaje de tamantildeo enorme para conseguir resultados aceptables La idea de
realizar un simple rdquosubmuestreordquo de las imaacutegenes puede conducir a una peacuterdida de detalle in-
admisible Es necesario un preprocesamiento adecuado de la informacioacuten original
Las siluetas son secuencias de puntos que podemos considerar como sentildeales complejas (para
rdquoempaquetarrdquo las dos coordenadas del plano en una uacutenica entidad matemaacutetica) perioacutedicas Esto
justifica una representacioacuten frecuencial unidimensional el contorno de una figura puede con-
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
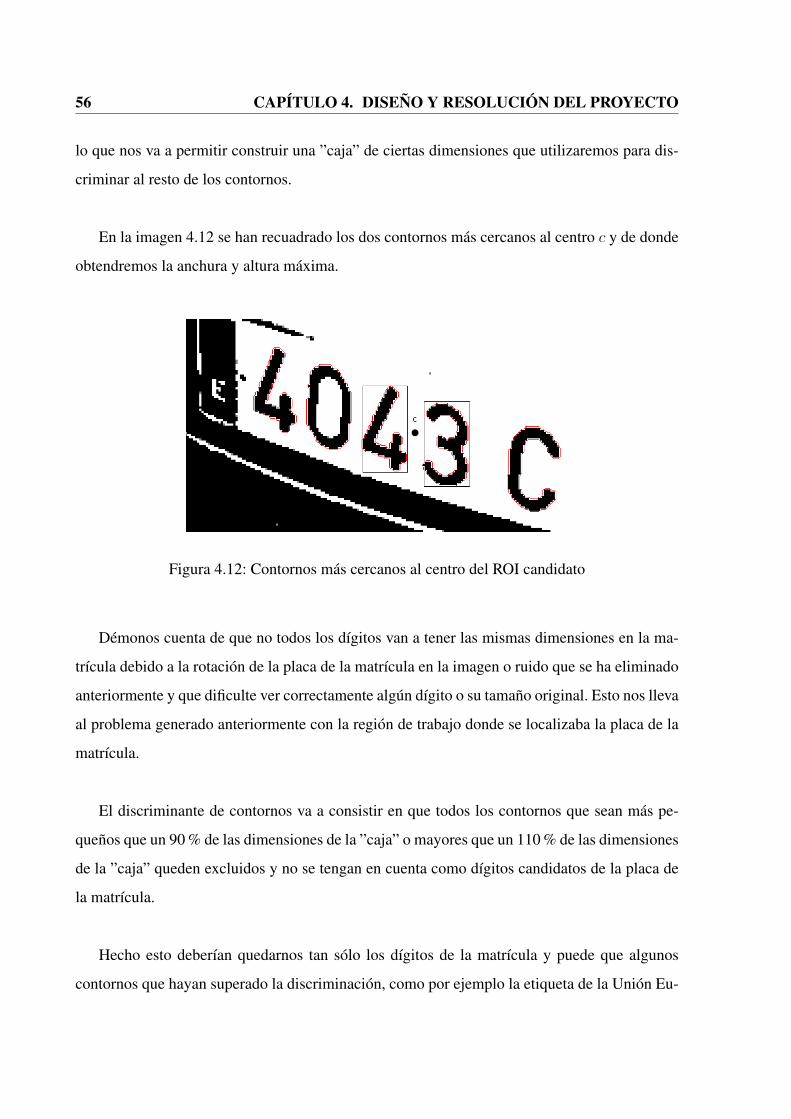
58 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Figura 414 Obtencioacuten de contornos final
siderarse como la superposicioacuten de varios contornos baacutesicos de diferentes frecuencias (nuacutemero
de rdquooscilacionesrdquo en el recorrido completo)
En todo sistema de reconocimiento hay que especificar lo mejor posible el tipo de transfor-
maciones admisibles frente a las que las propiedades elegidas deben ser invariantes En este
caso deseamos distinguir formas de diacutegitos independientemente de su posicioacuten en el plano de
la rotacioacuten que hayan podido sufrir de su tamantildeo del punto de partida del contorno de la dis-
tancia concreta entre los puntos del contorno (siempre que esteacuten regularmente espaciados) y
por supuesto invariantes a pequentildeas deformaciones
Las componentes frecuenciales obtenidas directamente de la Transformada Discreta de Fouri-
er (C) del contorno Fi i = 0n minus 1 no son directamente invariantes a las anteriores transfor-
maciones Sin embargo es sencillo calcular propiedades derivadas di que siacute lo son
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
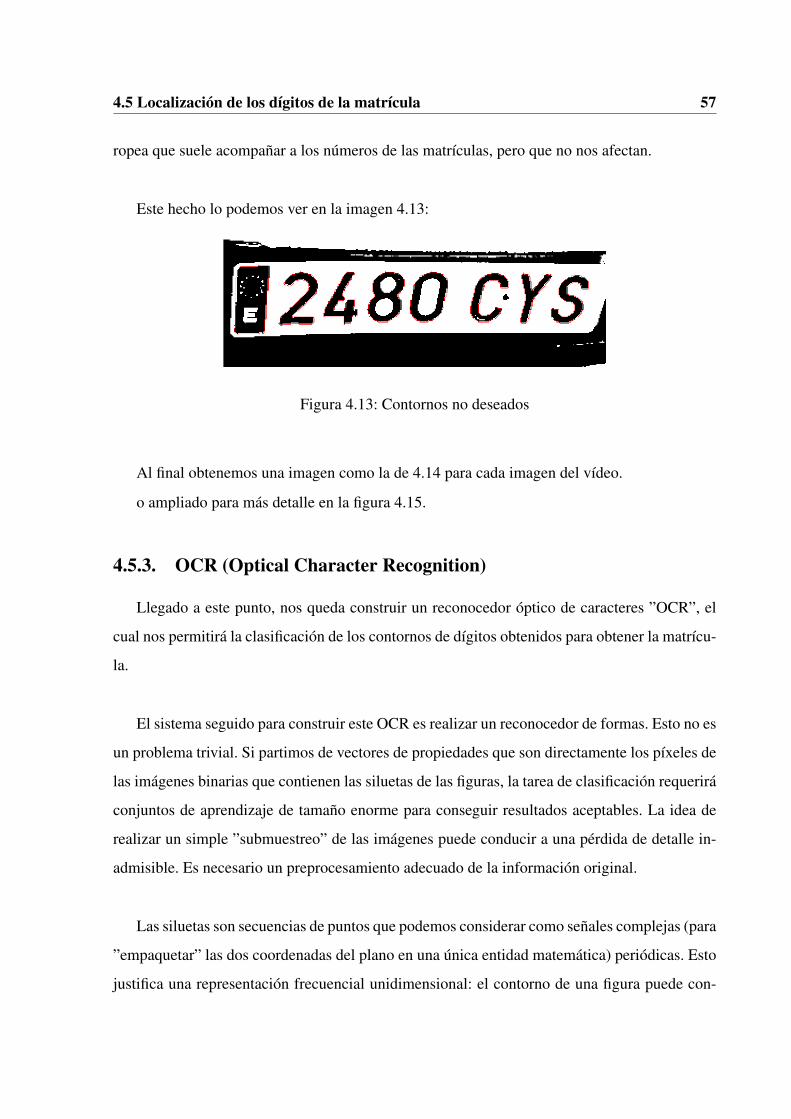
45 Localizacioacuten de los diacutegitos de la matriacutecula 59
Figura 415 Obtencioacuten de contornos ampliado
Para ello
Calculamos el valor absoluto de cada componente frecuencial eliminando la fase y por
tanto la dependencia del punto de partida y de la rotacioacuten de la figura ei = |Fi|
Juntamos la contribucioacuten positiva y negativa de cada frecuencia eprimei = ei + enminusi i =
1n2minus 1
Descartamos la frecuencia cero (valor medio de la sentildeal) que indica la posicioacuten del centro
de la figura
Dividimos todas las componentes por la de frecuencia 1 relacionada con el tamantildeo
global de la figura (elipse aproximadora) consiguiendo asiacute invarianza a escala di =
eprimei+1eprime1 parai = 1m
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
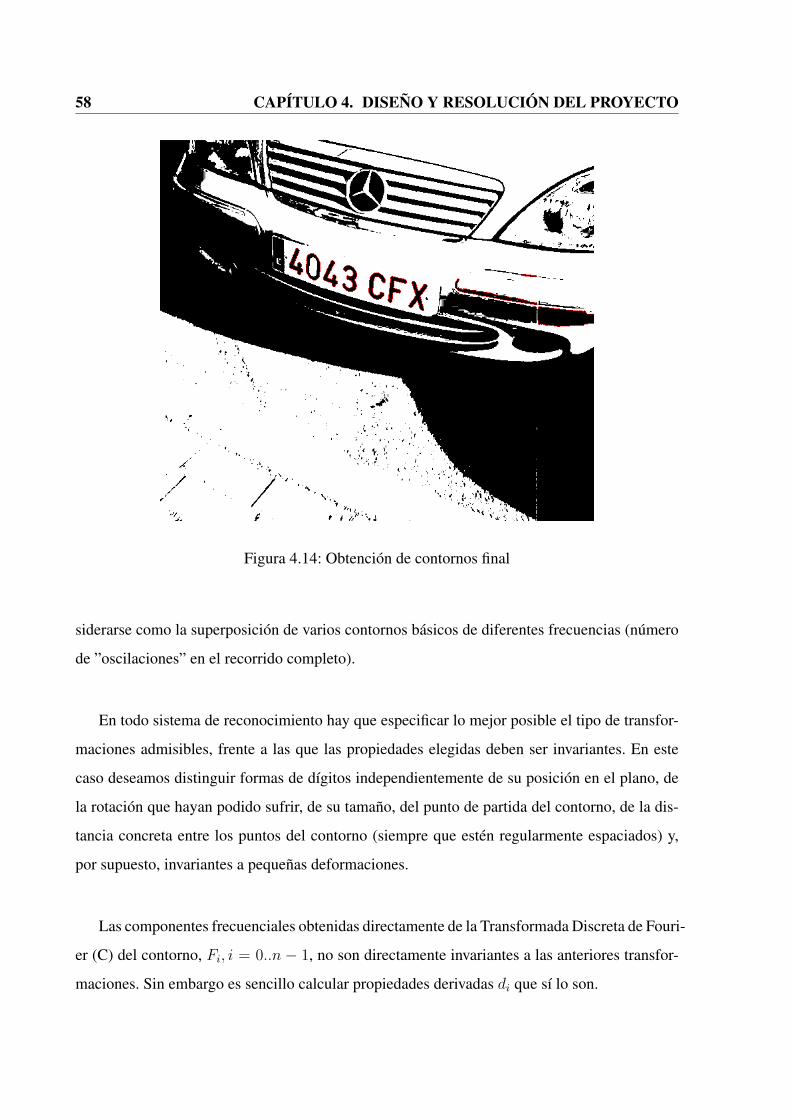
60 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
Nos quedamos con los descriptores de baja frecuencia consiguiendo asiacute invarianza a pe-
quentildeas deformaciones m = 10 o 15 por ejemplo El valor concreto de m dependeraacute de la
similitud de los nuacutemeros que deseamos distinguir Se puede ajustar observando la calidad
de la reconstruccioacuten de los contornos de intereacutes al eliminar diferente nuacutemero de compo-
nentes espectrales Pero con el nuacutemero de frecuencias definido es vaacutelido y suficiente para
distinguir los nuacutemeros
A la hora de clasificar los contornos utilizaremos el meacutetodo de rdquoMiacutenima distanciardquo Este
meacutetodo se aplicaraacute sobre los invariantes que hemos obtenido sobre una base de contornos y los
contornos que obtenemos en la imagen a estudiar
Para construir la base se han utilizado siluetas de diacutegitos pertenecientes a la base de viacutedeos
que tenemos Estas siluetas se han pasado a forma de poliliacutenea guardando en un fichero cada
uno de los puntos que la componen para posteriormente y utilizando Octave calcular los invari-
antes de cada diacutegito
Para cada contorno de los viacutedeos ocurre lo mismo se guardan en un fichero y se les calcula
sus invariantes
El meacutetodo de rdquoMiacutenima distanciardquo lo que hace es la resta de los vectores de invariantes de
los diacutegitos de la base con el vector de invariantes del contorno a clasificar se suman las restas
obtenidas entre cada par de vectores y obteniendo diez valores el diacutegito que obtenga menor
valor seraacute el elegido para representar al contorno en cuestioacuten como queda representado en la
siguiente foacutermula
nsumi=0
(Xi minusDi) (44)
Xi = Invariantes del diacutegito a clasificar
Di = Invariante del diacutegito de la base
n = Nuacutemero total de invariantes de cada diacutegito
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
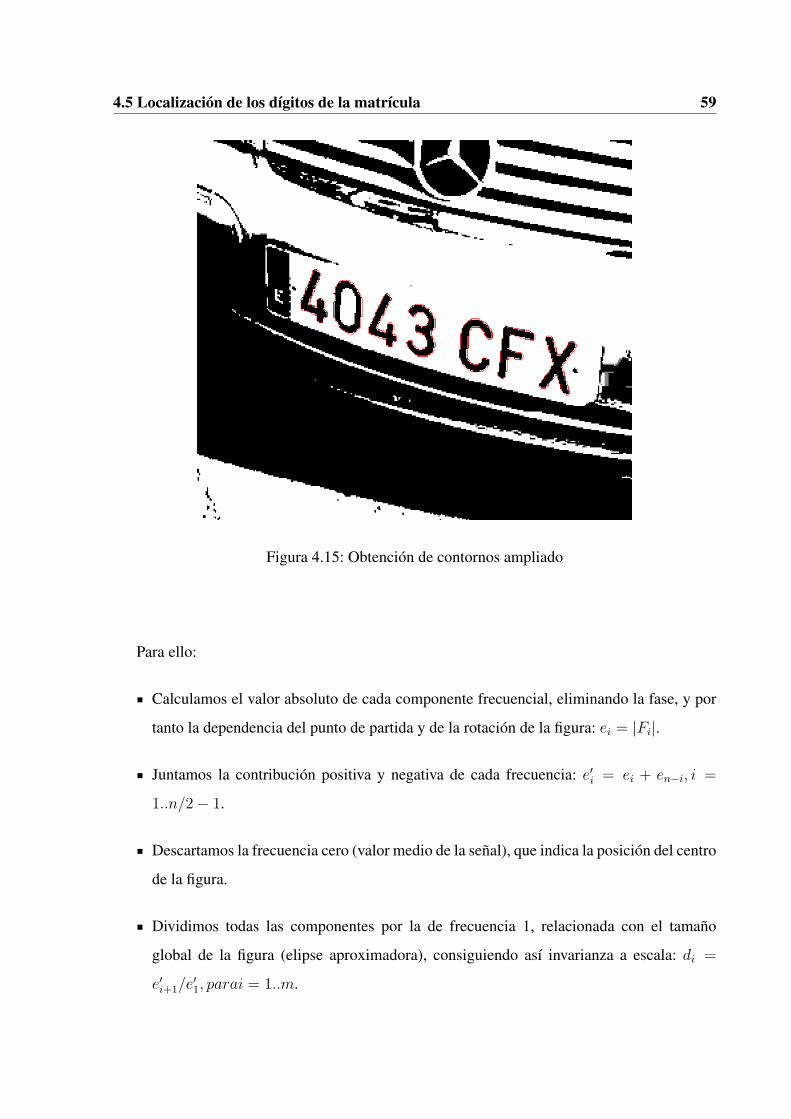
45 Localizacioacuten de los diacutegitos de la matriacutecula 61
Cabe destacar que tan solo realizamos una clasificacioacuten de caracteres numeacutericos dejando a
un lado la clasificacioacuten alfabeacutetica de las letras de las matriacuteculas lo cual puede ser una viacutea futura
para el presente proyecto
Otro tema importante que se ha detectado durante las pruebas es que es necesario usar la
totalidad de los puntos de los contornos Anteriormente explicaacutebamos el algoritmo IPE para
eliminacioacuten de puntos innecesarios Por ello solo aplicaremos el algoritmo de eliminacioacuten para
realizar el dibujado graacutefico de los contornos pero no para el calculo de los contornos que luego
seraacuten usados en el OCR
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
62 CAPIacuteTULO 4 DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
5CONCLUSIONES
51 Una vista atraacutes
El objetivo inicial de este proyecto era crear un sistema capaz de obtener los contornos los
diacutegitos de una imagen en la que hay contenida una placa de matriacutecula de automoacutevil El sistema
desarrollado hace uso de entrada de viacutedeo en formato AVI o MPEG con secuencias de imaacute-
genes y tambieacuten funcionariacutea con imaacutegenes sueltas para llevar a cabo el reconocimiento
52 Dificultades y limitaciones
Algunas de las dificultades o limitaciones en el sistema que se han podido encontrar han
sido
Aparicioacuten de objetos delante de las placas de matriacuteculas como hierbas ramas arbustos
etc que podriacutean dificultar el reconocimiento de alguacuten diacutegito de la placa de la matriacutecula
Lo ideal es trabajar con viacutedeos de dimensiones de 720x576 para que se ajuste mejor a
todo el desarrollo del sistema a la hora de realizar las pruebas y evitar alteraciones en la
salida del sistema
63
64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

64 CAPIacuteTULO 5 CONCLUSIONES
En algunas imaacutegenes o frames podriacutean encontrarse zonas de blanco tales como pasos de
cebra coches de color blanco-grisaacuteceo reflejos luminosos etc que pueden entorpecer la
correcta deteccioacuten de la placa al tener caracteriacutesticas muy similares
En la deteccioacuten de la placa de matriacutecula soacutelo vamos a poder detectar una placa de ma-
triacutecula En caso de que en una misma imagen aparecieran dos matriacuteculas el clasificador
se decantariacutea por una de ellas que seriacutea la que mejor se ajuste a la textura de placa de
matriacutecula que ha reconocido en el aprendizaje
53 Viacuteas futuras
Propondremos las siguientes viacuteas futuras para continuar con el trabajo desarrollado en este
proyecto de fin de carrera
Integracioacuten de Octave dentro del mismo programa realizando el clasificador con fun-
ciones de Octave pero en lenguaje CC++ para que la parte de la clasificacioacuten se ejecute
de manera maacutes raacutepida
Posibilidad de reconocimiento de maacutes de una placa de matriacutecula dentro de la imagen o
frame
Reconocimiento de los diacutegitos alfabeacuteticos de la matriacutecula dentro de la placa mostraacutendolos
en texto ascii haciendo uso de un OCR
Ampliacioacuten de la base de datos de viacutedeos introduciendo otros con maacutes dificultades para
la correcta localizacioacuten de la placa
Deteccioacuten y emborronamiento de la zona de la placa de la matriacutecula como medida de
privacidad
54 Objetivos cumplidos
En conclusioacuten consideramos que se han cumplido los objetivos propuestos en el proyecto
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
54 Objetivos cumplidos 65
Se ha generado una base de viacutedeos para las pruebas y entrenamientos
Se ha construido un meacutetodo que permite la correcta localizacioacuten de la zona de la placa de
la matriacutecula haciendo uso del clasificador construido
Se ha construido un sistema que permite obtener los ROIrsquos de cada imagen y sus vectores
de propiedades LBP asociados
Se ha construido un sistema que obtiene los contornos de los diacutegitos de la matriacutecula
Se ha construido un sistema que obtiene los diacutegitos numeacutericos de la matriacutecula
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
66 CAPIacuteTULO 5 CONCLUSIONES
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
AMANUAL DE USUARIO
A1 Ejecucioacuten del programa
En este apeacutendice vamos a mostrar un manual de uso del programa junto con las opciones
que podemos modificar utilizando paraacutemetros
La orden baacutesica de ejecucioacuten del sistema seriacutea
pfc-reconocedor --URL=rsquorsquoruta del videorsquorsquo
--Entreno=rsquorsquofichero de entrenamientorsquorsquo
Donde
URL Es la ruta del viacutedeo del que queremos obtener las matriacuteculas Tambieacuten podriacutea ser un
conjunto de imaacutegenes sueltas
Entreno Es la ruta del fichero que utilizaremos como entrenamiento para el aprendizaje del
clasificador
Los paraacutemetros configurables que tenemos y que podemos obtener con la opcioacuten rdquominusminushelprdquo
son los siguientes
67
68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

68 APEacuteNDICE A MANUAL DE USUARIO
minusminusmax-worker-iterations=int (def -1) Establece el nuacutemero maacuteximo de iteracionesframes a
ejecutar
minusminusstats-enabled=bool Habilita las estadiacutesticas de CPU del worker
minusminusPR-file-name=text Nombre del fichero de Posibles ROIs (ROIS candidatos)
minusminusEntreno=text Nombre del fichero de entreno del clasificador
minusminusWRB=int (def 200) Ancho del rectaacutengulo de barrido RBI
minusminusHRB=int (def 50) Alto del rectaacutengulo de barrido RBI
minusminusSX=int (def 25) Offset en el eje X del rectaacutengulo de barrido (RBI)
minusminusSY=int (def 25) Offset en el eje Y del rectaacutengulo de barrido (RBI)
minusminusverbose=int (def 0) Mostrar mensajes por pantalla sobre el estado de la ejecucioacuten
minusminusthreshold=double (def 4) Umbral de LBP para el entorno del pixel central
minusminusMinAreaIPE=int (def 0) Area miacutenima para mantener puntos en el algoritmo IPE
minusminusminPoints=int (def 100) Miacutenim nuacutemero de puntos a mantener en el algoritmo IPE
minusminuspThreshold=int (def 128) Umbral binarizacioacuten
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
BOTRAS TEacuteCNICAS DE
SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
Para el proyecto hemos utilizado la teacutecnica Otsu (315) que obtiene unos resultados exce-
lentes pero podriacuteamos haber utilizado otras teacutecnicas como alternativas ([7] y que presentamos
en este apeacutendice
B1 Meacutetodo basado en bordes
Los piacutexeles del borde tendraacuten histograma regular con equiprobabilidad de objeto y borde
donde soacutelo se considera el histograma de los piacutexeles del bordes del objeto de intereacutes
La deteccioacuten de bordes es omnidireccional Laplaciana Soacutelo se consideraraacuten piacutexeles cuya
Laplaciana sea menor que un cierto valor
69
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
70APEacuteNDICE B OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE
UMBRALIZACIOacuteN
B2 Buacutesqueda iterativa
Busca zonas del histograma coherentes desde el punto de vista de la media
Es oacuteptimo para el problema de binarizacioacuten de imaacutegenes minimizando el error medio cuadraacuteti-
co respecto a la media de cada poblacioacuten
B3 Media
Como su nombre indica esta teacutecnica consiste en calcular la media de todos los piacutexeles
B4 Maacuteximo y miacutenimo
Este algoritmo consiste en seguir estos tres pasos
1 Localizar el maacuteximo del histograma
2 Localizar el segundo maacuteximo se refiere al local
Maacuteximo producto del valor del histograma por distancia
3 Localizar el miacutenimo entre ellos
B5 Otras teacutecnicas
Miacutenima Varianza Maacutexima Correlacioacuten Maacutexima Entropiacutea Miacutenimo error de clasificacioacuten
Teacutecnicas basadas en loacutegica borrosa Meacutetodo de Chow-Kaneko Modelos basados en relajacioacuten
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
CTRANSFORMADA DE FOURIER
La transformada de Fourier se utiliza para pasar al laquodominio frecuencialraquo una sentildeal para asiacute
obtener informacioacuten que no es evidente en el laquodominio temporalraquo Se demuestra matemaacutetica-
mente que una sentildeal perioacutedica se puede descomponer en una suma de senos y cosenos formando
una base ortogonal de esta forma sentildeales como la voz o las ondas se pueden descomponer en
un sumatorio de sentildeales trigonomeacutetricas El conjunto de constantes que multiplican a cada fre-
cuencia forman el espectro de frecuencias
C1 Propiedades de la Transformada de Fourier
Vamos a comentar algunas de las propiedades de la Transformada de Fourier
Linealidad La transformada de la suma de varias sentildeales ponderadas se obtiene directamente
a partir de las transformadas de cada componente
z[α middot f(x) + β middot g(x)] = α middotz(ω) + β middotG(ω)
En el caso discreto la transformacioacuten puede expresarse simplemente como un producto
matriz vector (aunque no es computacionalmente tan eficiente como la FFT)
Separabilidad dimensional La transformada de una sentildeal multidimensional se puede calcular
mediante sucesivas transformaciones 1D P ej la transformada de una imagen se puede
71
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
72 APEacuteNDICE C TRANSFORMADA DE FOURIER
hacer calculando la transformada de todas las filas y luego la de todas las columnas resul-
tantes del paso anterior
Traslacioacuten Al desplazar la sentildeal en el espacio (lo que en el caso de una funcioacuten muestreada por
la suposicioacuten de periodicidad es equivalente a rdquorotarrdquo la lista de muestras) la transformada
soacutelo cambia su fase pero no el moacutedulo Es loacutegico porque la fase de la onda es relativa a la
situacioacuten maacutes o menos arbitraria del origen de coordenadas La energiacutea de las diferentes
componentes frecuenciales indicada por el moacutedulo de las coordenadas frecuenciales no
cambia
zf(xminus a) = eiaω middotz(ω)zminus1 middotz(ω minus φ) = eminusiφx middot f(x) (C1)
Escalado Al estirar la funcioacuten en el eje x su transformada no cambia maacutes que en un rdquoreajusterdquo
del tamantildeo de las frecuencias que teniacutea anteriormente
zf(ax) =1
|a|z(ω
a) (C2)
Rotacioacuten (en 2D) Debido a que cada componente F(u v) representa la contribucioacuten de una
onda plana en direccioacuten (u v) si rotamos una rdquoimagenrdquo la transformada rota exactamente
igual
Valor medio La frecuencia cero (componente constante) nos da la media de la sentildeal
F (0) = Ef(x) (C3)
Dualidad Las propiedades del operador F y de su inverso son esencialmente iguales El do-
minio espacial y frecuencial son intercambiables
f(x) minusrarrz z(ω) minusrarrz f(minust) (C4)
Parseval La transformacioacuten es ortonormal y por tanto preserva la normaintR
|f(x)|2dx =
intR
|z(ω)|2dω (C5)
Simetriacutea conjugada Si la sentildeal es real cada pareja de frecuencias contribuye a una componente
tipo coseno
z(minusω) = z(ω) (C6)
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
C2 Optimizacioacuten de la Transformada de Fourier 73
Periodicidad DFT Por el fenoacutemeno de aliasing la DFT es perioacutedica y las frecuencias negativas
se confunden con las positivas
zminusw = znminusω (C7)
C2 Optimizacioacuten de la Transformada de Fourier
En el entorno Octave hacemos uso de la Transformada de Fourier pero en su versioacuten Raacutepida
(FFT) [3] El algoritmo FFT lo uacutenico que busca es resolver de la manera maacutes eficiente posible
la siguiente expresioacuten
X[n] =1
N
Nminus1sumn=0
X[N ] middot eminusjkΩn (C8)
donde como sabemos
Ω = 2πN (C9)
La evaluacioacuten directa de este sumatorio implicaN2 multiplicaciones Haciendo una serie de
reordenaciones conseguiremos con la FFT reducirlo a N lowast Log2(N) operaciones
Primero se deben separar las muestras pares y las impares
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn +
N2minus1sumn=0
X[2N + 1] middot eminus(2n+1)jkΩn) (C10)
A continuacioacuten sacamos fuera de el sumatorio impar la exponencial eminusjkΩ
X[n] =1
N(
N2minus1sumn=0
X[2N ] middot eminus2jkΩn + eminusjkΩ +
N2minus1sumn=0
X[2N + 1] middot eminus2jkΩn) (C11)
Si paramos a observar esta expresioacuten podemos ver que si ponemos Y = FFT (x[0] x[2] x[4] x[Nminus
2]) y Z = FFT (x[1] x[3] x[5] x[N minus 1]) entonces
X[k] =1
2(Y [k] + eminusjkΩ middot Z[k]) si0 le k lt N2 (C12)
74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

74 APEacuteNDICE C TRANSFORMADA DE FOURIER
X[k] =1
2(Y [k minusN2]minus eminusjkΩ middot Z[k minusN2]) siN2 le k lt N (C13)
El problema ha sido reducido al caacutelculo de dos FFTs de tamantildeo N2 y realizar N multiplica-
ciones complejas Repitiendo este proceso reiteradamente conseguimos extraer la transformada
de X
Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-

Bibliografiacutea
[1] B Borba C Vasconcelos M P de Albuquerque M P de Albuquerque I A Esquef and
J M de Seixas Localization of Brazilian Vehicles Plates Using Frequency Analysis In
SIBGRAPI page 408 2002
[2] M I Cano Tarruella Guiacutea sobre la implantacioacuten de una tasa por congestioacuten en Barcelona
Tesina Universidad Politeacutecnica de Cataluntildea 2004
[3] La web de Pacop Ingenieriacutea Explicacioacuten del algoritmo FFT httpwwwpacop
nettransformada-de-fourier-ffthtml
[4] Tasa de Congestioacuten en Londres Website httpwwwtflgovuk
[5] J M Loacutepez Fernandez J Gozaacutelez C Galindo and V Areacutevalo Reconocimiento automaacuteti-
co de matriacuteculas usando operadores morfoloacutegicos y muacuteltiples redes neuronales XXVII
Jornadas de Automaacutetica Universidad de Almeriacutea pages 627ndash632 2006
[6] R C Marques FNtilde Medeiros J L Silva and C M Laprano License Vehicle Plates
Localization Using Maxixum Correlation Structural Syntactic and Statistical Pattern
Recognition pages 470ndash476 2004
[7] R Martiacutenez de Dios Teacutecnicas de Segmentacioacuten Master en Automaacutetica Roboacutetica
y Telemaacutetica httpwwwesi2uses~jdediosasignaturasVision
html
[8] M P T Ojala and D Harwood A comparative study of texture measures with classi-
fication based on feature distributions Pattern Recognition Performance Evaluation of
Texture Measures with Classification Based on Kullback Discrimination of Distributions
pages 51ndash59 1994
[9] N Otsu A threshold selection method from gray level histograms IEEE Trans Systems
Man and Cybernetics 962ndash66 Mar 1979
75
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-
76 BIBLIOGRAFIacuteA
[10] J Parker and P Federl An Approach To Licence Plate Recognition 1996 http
hdlhandlenet188046439
[11] L M Pechuaacuten Uso de ontologiacuteas para guiar el proceso de segmentacioacuten de imaacutegenes
Proyecto Fin de Carrera 2007 httpdigitumumesxmluibitstream
102018611memoriapdf
[12] M Pietikaumlinen G Zhao A D o E Hadid and I E U of Oulu Local Binary Pattern
Approach to Computer Vision 2004
[13] A Ruiz Garciacutea Apuntes de las asignaturas de Sistemas de Percepcioacuten y Visioacuten por Com-
putadorUniversidad de Murcia Facultad de Informaacutetica 2009
[14] J J Ruiz Lendinez T J Rubio Campos and J M Lara Cabeza Extraccioacuten de pun-
tos de control mediante caracterizacioacuten textual en procesos de conflacioacuten vectorortoim-
agen 2007 httpwwwmappinginteractivocomplantilla-ante
aspid_articulo=1443
[15] N Vaacutezquez MNtildeakano and H Peacuterez-Meana Automatic System for localization and
recognition of vehicle plate number Applied Research and Technology pages 63ndash77
2002
- INTRODUCCIOacuteN Y REFERENCIAS HISTOacuteRICAS
-
- Introduccioacuten
-
- Los sistemas RAPM como aplicacioacuten praacutectica de Inteligencia Artificial
- Aspectos matemaacuteticos de los sistemas RAPM
- Aspectos fiacutesicos en los sistemas RAPM
-
- Estado del arte
- Organizacioacuten del documento
-
- ANAacuteLISIS Y OBJETIVOS
-
- Objetivos y alcance del proyecto
- Queacute no es objetivo del proyecto
- Plan de trabajo
-
- TEacuteCNICAS Y HERRAMIENTAS UTILIZADAS
-
- Teacutecnicas Utilizadas
-
- Local Binary Patterns (LBP)
- Clasificacioacuten mediante pseudoinversa
- Obtencioacuten de los vectores de propiedades
- Obtencioacuten del contorno de los diacutegitos
- Teacutecnica de binarizacioacuten de Otsu
-
- Herramientas Utilizadas
-
- Eleccioacuten del Lenguaje
- QVision
- Intelreg Integrated Perfomance Primitives IPP
- QT Library
- Octave
-
- DISENtildeO Y RESOLUCIOacuteN DEL PROYECTO
-
- Estructura del Proyecto
- Construccioacuten de viacutedeos de entrenamiento
- Obtencioacuten de los ROIs de las matriacuteculas
- Construccioacuten del clasificador
-
- Generacioacuten del fichero de propiedades
- Construccioacuten del clasificador en Octave
- Aplicacioacuten del clasificador
-
- Localizacioacuten de los diacutegitos de la matriacutecula
-
- Binarizacioacuten de la imagen
- Obtencioacuten del contorno de diacutegitos
- OCR (Optical Character Recognition)
-
- CONCLUSIONES
-
- Una vista atraacutes
- Dificultades y limitaciones
- Viacuteas futuras
- Objetivos cumplidos
-
- MANUAL DE USUARIO
-
- Ejecucioacuten del programa
-
- OTRAS TEacuteCNICAS DE SEGMENTACIOacuteN MEDIANTE UMBRALIZACIOacuteN
-
- Meacutetodo basado en bordes
- Buacutesqueda iterativa
- Media
- Maacuteximo y miacutenimo
- Otras teacutecnicas
-
- TRANSFORMADA DE FOURIER
-
- Propiedades de la Transformada de Fourier
- Optimizacioacuten de la Transformada de Fourier
-


















