Dinámica Hamiltoniana y Geometría Simpléctica Curso de ...
12
Dinámica Hamiltoniana y Geometría Simpléctica Curso de Posgrado - 1er semestre 2021 Lista de Ejercicios n. 7 Ejercicio 1 (Integrabilidad, tensor de Nijenhuis, brados holomorfos y divisores, variedades de Kähler, de Weinstein y de Stein) El objetivo de este práctico (de un solo ejercicio épico) es explorar ejemplos de variedades simplécticas de tipo algebraico, i.e. que provienen de la geometría algebraica compleja, y/o el análisis complejo, y por lo tanto son más “rígidas”. Este tipo de variedades son los que normalmente aparecen cómo el espacio subyacente a la dinámica de los sistemas integrables, lo cuál vagamente justica decir que éstos son “rígidos” o “algebraicos”. También exploraremos las variedades de Weinstein, que son la versión simpléctica (y por lo tanto más “exible”) de variedades de Stein (la versión algebraica). En resumen, una variedad de Stein es una variedad compleja afín (i.e. propiamente encajada en ); una variedad de Weinstein es aquella que se construye asociando asas de Weinstein y por lo tanto tienen una función de Morse para la cuál el campo de Liouville es un (pseudo)gradiente; una variedad de Stein es de Weinstein y además es compleja. Toda variedad de Weinstein es de Liouville, y toda variedad de Stein es Kähler. Toda variedad algebraica proyectiva (i.e. encajada en ) es Kähler. Uno puede obtener variedades de Stein de las variedades algebraicas proyectivas removiendo divisores algebraicos (i.e. el conjunto nulo de una sección de un brado de línea holomorfo en ). Toda supercie orientable con borde no vacío es Stein (ver el práctico anterior; aquí tendrán más herramientas). Primero, empezamos con nociones básicas de la geometría compleja. Dos excelentes referencias introductorios son el libro de Huybrechts [Huy], y el clásico libro de Griths-Harris [GH]. Para aprender sobre variedades de Stein y Weinstein más en profundidad, recomiendo el libro de Cieliebak-Eliashberg [CE]. (0) (Propiedad 2 de 3, estructura hermítica, notación compleja) Probar que vale la siguiente igualdad de grupos de Lie: () = (2) ∩ (, ) = (2) ∩ (2, ) = (, ) ∩ (2, ), dónde, si = 0 1 -1 0 es la rotación compleja estándar, () = { ∈ (2, ) = -1 } es el grupo unitario , (2) = { ∈ (2, ) = -1 } es el grupo ortogonal, 1
Transcript of Dinámica Hamiltoniana y Geometría Simpléctica Curso de ...

Dinámica Hamiltoniana y Geometría SimplécticaCurso de Posgrado - 1er semestre 2021
Lista de Ejercicios n. 7
Ejercicio 1(Integrabilidad, tensor de Nijenhuis, �brados holomorfos y divisores, variedades deKähler, de Weinstein y de Stein)
El objetivo de este práctico (de un solo ejercicio épico) es explorar ejemplos de variedadessimplécticas de tipo algebraico, i.e. que provienen de la geometría algebraica compleja, y/oel análisis complejo, y por lo tanto son más “rígidas”. Este tipo de variedades son los quenormalmente aparecen cómo el espacio subyacente a la dinámica de los sistemas integrables, locuál vagamente justi�ca decir que éstos son “rígidos” o “algebraicos”. También exploraremoslas variedades de Weinstein, que son la versión simpléctica (y por lo tanto más “�exible”) devariedades de Stein (la versión algebraica). En resumen, una variedad de Stein es una variedadcompleja afín (i.e. propiamente encajada en ℂn); una variedad de Weinstein es aquella quese construye asociando asas de Weinstein y por lo tanto tienen una función de Morse parala cuál el campo de Liouville es un (pseudo)gradiente; una variedad de Stein es de Weinsteiny además es compleja. Toda variedad de Weinstein es de Liouville, y toda variedad de Steines Kähler. Toda variedad algebraica proyectiva (i.e. encajada en ℂPn) es Kähler. Uno puedeobtener variedades de Stein de las variedades algebraicas proyectivas removiendo divisoresalgebraicos (i.e. el conjunto nulo de una sección de un �brado de línea holomorfo en ℂPn).Toda super�cie orientable con borde no vacío es Stein (ver el práctico anterior; aquí tendránmás herramientas).
Primero, empezamos con nociones básicas de la geometría compleja. Dos excelentes referenciasintroductorios son el libro de Huybrechts [Huy], y el clásico libro de Gri�ths-Harris [GH].Para aprender sobre variedades de Stein y Weinstein más en profundidad, recomiendo el librode Cieliebak-Eliashberg [CE].
(0) (Propiedad 2 de 3, estructura hermítica, notación compleja) Probar que vale lasiguiente igualdad de grupos de Lie:
U (n) = O(2n) ∩ GL(n,ℂ) = O(2n) ∩ Sp(2n,ℝ) = GL(n,ℂ) ∩ Sp(2n,ℝ),
dónde, si J = (0 1
−1 0 ) es la rotación compleja estándar,
U (n) = {U ∈ GL(2n,ℝ) ∶ U ⋆ = U −1} es el grupo unitario ,
O(2n) = {A ∈ GL(2n,ℝ) ∶ At = A−1} es el grupo ortogonal,
1

Sp(2n,ℝ) = {A ∈ GL(2n,ℝ) ∶ AtJA = J} es el grupo simpléctico, y
GL(n,ℂ) = {A ∈ GL(2n,ℝ) ∶ AJ = JA} es el grupo de matrices complejas.
Dada una variedad M de dimensión par, una estructura hermítica en M es una terna(g, !, J ) dónde g es una métrica Riemanniana, ! es una forma simpléctica, J es unaestructura casi compleja (i.e. J ∈ End(TM), J 2 = −1, esto es, una rotación compleja enlas �bras), que satisfacen las siguientes condiciones de compatibilidad:
∙ g = !(⋅, J ⋅), g(J ⋅, J ⋅) = g(⋅, ⋅) (i.e. g es J -invariante);
∙ ! = g(J ⋅, ⋅), !(J ⋅, J ⋅) = !(⋅, ⋅) (i.e. ! es J -invariante);
∙ J = (ig)−1◦i! ,
dóndei! ∶ TM → T ⋆M, i!(v) = iv! = !(v, ⋅),
ig ∶ TM → T ⋆M, ig(v) = ivg = g(v, ⋅),
que son isomor�smos. La tupla (M, g, !, J ) se dice una variedad Hermítica. Deducir, dela igualdad de grupos de Lie dada arriba, que cualquier par de la terna (g, !, J ) determinael tercero excluído. Podemos luego decir que un elemento de la terna (g, !, J ) se dicecompatible con otro elemento de la terna si se relacionan por las ecuaciones de arriba, y eltercero excluído es un tensor del tipo adecuado (e.g. J es compatible con ! si g = !(⋅, J ⋅)es una métrica J -invariante).
El �brado tangente complejo de M es por de�nición TℂM = TM ⊗ ℂ, i.e. la complexi-�cación del �brado tangente real TM = TℝM . Comprobar que una terna hermítica esequivalente a dar una forma hermítica
ℎ = g − i!,
i.e. ℎ(v, w) = ℎ(w, v) para todo v, w ∈ TℂM , y ℎ(v, v) > 0 para todo v ≠ 0, v ∈ TℂM , queademás es J -invariante, i.e.
∙ ℎ(J ⋅, J ⋅) = ℎ(⋅, ⋅).
Comprobar que una estructura casi compleja J induce descomposiciones
TℂM = T 1,0M ⊕ T 0,1M, ΛℂM ∶= T ⋆ℂM = Λ1,0M ⊕ Λ0,1M,
dónde
T 1,0M = {v − iJ v ∶ v ∈ TℝM}, T 0,1M = {v + iJ v ∶ v ∈ TℝM}, T 1,0M = T 0,1M,
son respectivamente el espacio propio de J de valor propio i, y el de valor propio −i, yanálogamente
Λ1,0M = {� − iJ � ∶ � ∈ T ⋆ℝM} = {� ∈ T
⋆ℂM ∶ �(X ) = 0, para todo X ∈ T 0,1M},
Λ0,1M = {� + iJ � ∶ � ∈ T ⋆ℝM} = {� ∈ T
⋆ℂM ∶ �(X ) = 0, para todo X ∈ T 1,0M},
Λ1,0M = Λ0,1M,
2

son respectivamente el espacio propio de J (actuando en T ⋅ℂM via J �(v) = �(Jv)) de valor
propio i, y el de valor propio −i. También tenemos una descomposición
ΛkTℂM = ⨁p+q=k
Λp,qTM,
dónde Λp,qTM = ⋀p Λ1,0M ⊗⋀q Λ0,1M , y vale que Λp,qTM = Λq,pTM .
Una variedad compleja es una variedad (real) M que admite un sistema de cartas locales'� ∶ U� ⊂ M → ℂn con cambios de coordenadas '�� = '�◦'−1� holomorfos. Comprobarque la ecuación de Cauchy-Riemann para '�� implica que J = '⋆� i = d'−1� ◦i◦d'� , dóndei ∈ End(ℂn) es la multiplicación por i, de�ne una estructura casi-compleja J global-mente en M . Una estructura casi compleja J ∈ End(TM) obtenida de esta manera, i.e.inducida localmente por i, se dice integrable, o simplemente una estructura compleja.Una super�cie de Riemann es una variedad compleja de dimensión (real) dos.
Nota: no es cierto que toda variedad casi-compleja (M, J ) admita una J ′ integrable. Perosi es cierto que toda variedad simpléctica es casi-compleja; ver lo que sigue. Variedadessimplécticas complejas de gran interés son e.g. las variedades de Kähler.
Dada M variedad compleja, en coordenadas complejas locales zj = xj + iyj , comprobarque vale
T 1,0M = span{)zj ∶ j = 1,… , n}, T 0,1M = span{)zj ∶ j = 1,… , n},
Λ1,0M = span{dzj ∶ j = 1,… , n}, Λ0,1M = span{dzj ∶ j = 1,… , n},
dónde)zj =
12()xj − i)yj), )zj =
12()xj + i)yj),
dzj = dxj + idyj , dzj = dxj − idyj ,
y que
Λp,q(M) = span{dzi1 ∧⋯ ∧ dzip ∧ dzj1 ∧⋯ ∧ dzjq ∶ 1 ≤ i1 < ⋯ < ip ≤ n, 1 ≤ j1 < ⋯ < jq ≤ n}.
Denotamos Ωkℂ(M) = Γ(ΛkTℂM); vale que Ωk
ℂ(M) = ⨁p+q=k Ωp,q(M), dónde Ωp,q(M) =Γ(Λp,qM) el espacio de (p, q)-formas diferenciales de M . Sea d ∶ Ωk
ℂ(M) → Ωk+1ℂ (M) la
extensión ℂ-lineal de la derivada exterior. De�nimos los operadores de Dolbeaut
) ∶ C∞(M)→ Ω1,0(M) = Γ(Λ1,0M), ) ∶ C∞(M)→ Ω0,1(M) = Γ(Λ0,1M)
) = �p+1,q◦d |Ωp,q(M), ) = �p,q+1◦d |Ωp,q(M),
dónde �p,q ∶ ΛkTℂM → Λp,qM es la proyección canónica. Comprobar que en coorde-nadas locales vale que
df =n
∑j=1
)f)xj
dxj +n
∑j=1
)f)yj
dyj =n
∑j=1
)f)zj
dzj +n
∑j=1
)f)zj
dzj = )f + )f ,
si f ∈ C∞(M), y deducir que f es holomorfa si y sólo si )f = 0. Comprobar que
)(f dzi1 ∧⋯ ∧ dzip ∧ dzj1 ∧⋯ ∧ dzjq ) =n
∑k=1
)f)zk
dzk ∧ dzi1 ∧⋯ ∧ dzip ∧ dzj1 ∧⋯ ∧ dzjq ,
3

)(f dzi1 ∧⋯ ∧ dzip ∧ dzj1 ∧⋯ ∧ dzjq ) =n
∑k=1
)f)zk
dzk ∧ dzi1 ∧⋯ ∧ dzip ∧ dzj1 ∧⋯ ∧ dzjq .
Comprobar qued = ) + ), )2 = )2 = 0, )) = −)),
y que satisfacen la ley de Leibnitz
)(� ∧ �) = )� ∧ � + (−1)p+q� ∧ )�,
)(� ∧ �) = )� ∧ � + (−1)p+q� ∧ )�
si � ∈ Ωp,q(M), � ∈ Ωr ,s(M). Comprobar que la forma simpléctica estándar se escribe encoordenadas complejas cómo
!std =n
∑j=1
dxj ∧ dyj =i2
n
∑j=1
dzj ∧ dzj ∈ Ω1,1(M).
Comprobar que !std admite un potencial plurisubharmónico f , i.e. se escribe como
!std =i2))f = −ddℂf ,
dónde f (z) = |z|2 = zz, y dℂf = df ◦i.
(1) (Contractibilidad de (M,!)) Dada una variedad simpléctica (M,!), probar que elespacio (M,!) de estructuras casi complejas J compatible con! es no vacío y contraíble(con la topología C∞). Análogamente, dada (M, J ) variedad casi-compleja, probar que elespacio (M, J ) de formas simplécticas ! compatibles con J es no vacío y contraíble.
Sugerencia: la contractibilidad de (M,!),(M, J ) es bastante no trivial, pero es un re-sultado estándar, debido a Gromov. Estudiarlo del libro de McDu�-Salamon [MS], que esla referencia estándar.
(2) (Integrabilidad) Dada una estructura casi compleja J en M , el tensor de Nijenhuis aso-ciado a J es NJ ∈ End(TM ⊗ TM, TM), dado por
NJ (v, w) = [v, w] + J [v, Jw] + J [Jv, w] − [Jv, Jw] ∈ TM, v, w ∈ TM.
Comprobar que NJ es efectivamente un tensor, i.e. NJ es C∞(M)-bilineal, que es alternado,i.e. NJ (v, w) = −NJ (w, v), y J anti-invariante, i.e. NJ (Jv, Jw) = −NJ (v, w). Comprobarque si J es integrable, vale que NJ = 0. Comprobar que NJ = 0 si y sólo si T 1.0M (óequivalentemente T 0,1M ) es integrable como distribución, i.e. cerrada por el corchete deLie.
Un resultado dí�cil del análisis complejo (que asumiremos sin prueba) es que tambiénvale el recíproco:
Teorema 1 (Newlander-Nirenberg). Una estructura casi compleja J es integrable si ysólo si NJ = 0.
(3) (Dimensión dos) Usando el teorema de Newlander-Nirenberg, probar que toda estruc-tura casi compleja en una super�cie es integrable. En otras palabras, toda super�cie(Σ, j) con j2 = −1 es una super�cie de Riemann, i.e. j es automáticamente una estructuracompleja.
4

(4) (Variedades de Kähler, variedades de Stein) Una variedad de Kähler es una variedadhermítica (M, g, !, J ) dónde J es integrable. Probar que toda super�cie orientable esKähler. Probar que una subvariedad compleja de una variedad de Kähler es de Kählercon la estructura inducida por restricción.
(i) (Variedades a�nes=variedades de Stein) Probar que (ℂn, gstd , !std , i) es de Kähler.Probar que no existen subvariedades complejas cerradas de ℂn.
Sugerencia: usar el principio del máximo a las coordenadas (z1,… , zn), vistas comofunciones en la subvariedad.
Deducir que toda subvariedad compleja de ℂn es abierta (i.e. tiene borde, o es nocompacta). Una subvariedad compleja M de ℂn, propiamente encajada, es unavariedad de Stein. Deducir que toda variedad de Stein es de Kähler.
Una de�nición alternativa es la siguiente: una variedad de Stein es una variedadcompleja (M, J ) que admite una función diferenciable f ∶ M → ℝ que satisface:
∙ f es exhaustiva, i.e. propia y acotada inferiormente; y
∙ f es J -convexa o estrictamente plurisubharmónica, i.e. !f = −ddℂf es una formasimpléctica compatible con J , dónde dℂ = df ◦J .
Probar que la primera de�nición implica la segunda, con f (z) = |z|2 restricta a M .El recíproco es un teorema debido a Grauert, Bishop y Narasimhan. Observar quea menos de perturbar f , podemos asumir que f es una función de Morse. Probarque el campo de gradientes de f con respecto de la métrica gf inducida por !f y Jes el campo de Liouville asociado a la primitiva �f ∶= −dℂf .
Si c es un valor regular de f , Mc = {f ≤ c} es un dominio de Stein. Probar que elborde Xc ∶= )Mc = f −1(c) es una variedad de contacto con estructura de contacto
� = TXc ∩ JTXc = ker(�f |Xc ),
la distribución de Levi, o distribución de tangencias complejas. Luego Xc es el bordeestrictamente (pseudo)convexo de Mc . Una variedad de contacto que es el bordeestrictamente (pseudo)convexo de un dominio de Stein se dice Stein-rellenable, óque admite un relleno de Stein. Deducir que un dominio de Stein es en particularun dominio de Liouville. Deducir que (S2n−1, �std ) es Stein-rellenable, con relleno deStein (B2n, !std ).
(Ejemplos concretos) La referencia para los ejemplos que siguen son las notas deKwon-van Koert [KvK].
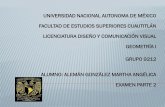
(A) (Links de singularidades, variedades de Brieskorn) Sea p ∶ (ℂn, 0) →(ℂ, 0) una función holomorfa con una singularidad aislada en el origen. De�ni-mos V0(p) = p−1(0), una subvariedad singular de ℂn. El link de la singularidades
L0,� (p) = V0(p) ∩ S2n−1� ,
dónde S2n−1� = )B� (0) y � es su�cientemente chico para que L0,� (p) sea una var-iedad. Denotamos V cpt
0,� (p) = V0(p) ∩B� (0), y por lo tanto )V cpt0,� (p) = L0,� (p). Pro-
bar que L0,� (p) admite una estructura de contacto �0,� (p) que es Stein-rellenable,
5

L
V(p)0
B (0)δ
0,δ
iTL0,δ
TL0,δ ξ0,δ
V(p)ε
Figure 1: El link de la singularidad L0,� es una variedad de contacto Stein-rellenable.
dónde �0,� (p) = ker �std |L0,� (p), con
�std =i2
n
∑j=0
zjdzj − zjdzj
la forma de contacto estándar en S2n−1� .
Sugerencia: Perturbar V0(p) a V"(p) = p−1(") con " chico para que sea no singularen el origen, considerar V cpt
",� (p) = V"(p) ∩ B2n� (0), y usar estabilidad de Gray (óbien usar un chichón adecuado).
En el caso que p(z) = ∑nj=0 z
ajj con aj > 0, la variedad de Brieskorn asociada es
V"(p) = p−1("),
con " chico. Probar que aj > 1 para todo j si y sólo si V0(p) es singular, y siai = 1 para algún i, luego (L0,� (p), �� (p)) es contactomorfa a (S2n−3, �std ).
(B) (Cotangente de Sn) Probar que si p(z) = z20+⋯+z2n, yV1(p) = {p(z) = 1} ⊂ ℂn+1,el mapa
(V1(p), !std |V1(p))→ (T ⋆Sn ⊂ T ⋆ℝn+1, !std )
z = q + ip ↦ (‖q‖−1q, ‖q‖p)
es un simplectomor�smo que manda V cpt1,1 = V1(p) ∩ B2n1 (0) a D⋆Sn, y cuya
restricción aL1,1(p) = )V
cpt1,1 (p) = {p(z) = 1, |z| = 1}
6

es un contactomor�smo estricto
(L1,1(p), �std )→ (S⋆Sn, �std ).
En otras palabras, T ⋆Sn es una variedad de Stein (una cuádrica en ℂn+1), D⋆Snes un dominio de Stein, y S⋆Sn es Stein-rellenable.
(ii) (Variedades proyectivas: forma de Fubini-Study) Lo que sigues es estándar,pero puede e.g. consultar las notas [MF] que contiene incluso más información, yes más concreta que las referencias clásicas.
El espacio proyectivoℂPn admite una forma de Kähler!FS , la forma de Fubini-Study,de�nida como sigue. Sea
K ∶ ℂn → ℝ,
K (z) = log(1 +
n
∑i=1
|zi |2).
En coordenadas homogéneas (�0 ∶ ⋯ ∶ �n) para ℂPn, sea U� = {(�0 ∶ ⋯ ∶ �n) ∶�� ≠ 0} y sea
'� ∶ U� → ℂn,
'� (�0 ∶ ⋯ ∶ �n) = (�0�i,… ,
�i−1�i,�i+1�i,… ,
�n�i )
= (z�1 ,… , z�n )
las cartas locales estándar alrededor de (0 ∶ ⋯ ∶ 1 ∶ ⋯ ∶ 0). Sea K� = K◦'� , y
!� =i2�
))K� =i2�
n
∑i,j=1
ℎij(z� )dz�i ∧ dz�j .
Comprobar que
ℎij(z� ) =�ij(1 +∑n
i=1 |z�i |2) − z�i z�j(1 +∑n
i=1 |z�i |2)2
Chequear que en los abiertos U�� = U� ∩ U� , tenemos que !� = !� , y por lo tantouna (1, 1)-forma global !FS de tal forma que !FS |U� = !� , y que admite el potencialplurisubharmónico (local) K� .
Probar que ∫L !FS = 1 a lo largo de toda línea L ≅ ℂP 1 ⊂ ℂPn y deducir que[!FS] ∈ H 2(ℂPn;ℝ) es el generador de la cohomología de ℂPn.
Probar que (ℂPn, J , !FS , gFS) es Kähler, dónde J es la estructura compleja integrableinducida por las cartas estándar, gFS es la métrica inducida por J y !FS es la formade Fubini-Study. Deducir que toda variedad proyectiva (i.e. encajada en ℂPn) esKähler. En particular, toda subvariedad X = V (F ) = {(�0 ∶ ⋯ ∶ �n) ∈ ℂPn ∶ F (�0 ∶⋯ ∶ �n) = 0} dónde F es un polinomio homogéneo no singular, es Kähler.
(iii) (�brados holomorfos, �brados de línea, divisores) Un �brado holomorfo derango k es un �brado diferenciable � ∶ E → X dónde E, X son variedades comple-jas, � es un mapa holomorfo, la �bra es un espacio vectorial complejo de dimensión(compleja) k =∶ rk(E), y los mapas locales de transición son holomorfos (o equiva-lentemente el grupo de estructura admite una reducción de GL(2k,ℝ) a GL(k,ℂ)).Probar que si M es variedad compleja, TℂM , T ⋆
ℂM , ΛkℂM son �brados holomorfos.
7

En general, probar que que si E, F son �brados holomorfos, E ⊕ F , E ⊗ F , E⋆, ΛkE,det E ∶= Λrk(E)E, son �brados holomorfos.
Un �brado de línea holomorfo es un �brado holomorfo de rango 1. Probar que siM es una variedad compleja, y Pic(M) es el conjunto de clases de isomor�smo de�brados de línea holomorfos sobre M , Pic(M) es un grupo con producto L1 ⋅ L2 =L1 ⊗ L2, inversa L−1 = L⋆, y elemento neutro = M × ℂ. Este es el grupo de Picardde M .
Dado un �brado de línea holomorfo � ∶ L → X , con trivializaciones '� ∶�−1(U� ) → U� × ℂ, las funciones de transición son g�� ∶ U�� = U� ∩ U� → ℂ⋆,dadas por
'��(p, v) = (p, g��(p)v),
dónde '�� = '�◦'−1� son los mapas de transición. Probar que g�� son un cociclode Čech, i.e. g�� = 1, g�� = g−1�� y g��g� = g� . Probar que todo cociclo de Čechdetermina un �brado de línea holomorfo, y dos cociclos de Čech determinan dos�brados isomorfos si y sólo si di�eren por un cociclo exacto, i.e. de la forma()f )�� = f� f −1� con f� ∶ U� → ℂ⋆. Esto da una identi�cación de Pic(X ) conH 1(X,⋆), el grupo de cohomología de Čech de X con coe�cientes en el haz ⋆ defunciones holomorfas no nulas en X .
(A) (Fibrados de Serre (k)) El espacio proyectivo ℂPn admite un �brado de líneaholomorfo (k) para cada k ∈ ℤ, de�nido cómo sigue.
Si U� = {�� ≠ 0} ⊂ ℂPn, y '� ∶ U� → ℂn es como en el ejercicio anterior, conmapa de transición '�� = '�◦'−1� de�nido en U�� , de�nimos �k ∶ (k)→ ℂPncómo el �brado trivial en esta carta, i.e. (k)|U� ≅ '� (U� )×ℂ via la trivialización � = '� × id ∶ U� × ℂ → '� (U� ) × ℂ, con mapas de transición
�� = �◦ −1� ∶ '��(U��) × ℂ → '��(U��) × ℂ,
��(z1,… , zn; z) = ('��(z1,… , zn) ;(
z�z� )
k
⋅ z).
Probar que efectivamente (k) es un �brado holomorfo, cuyas secciones holo-morfas Γ((k)) consiste precisamente de los polinomios homogéneos de gradok, si k ≥ 0. Si k < 0, probar que (k) no admite secciones holomorfas, pero síadmite secciones meromorfas con polos de orden a lo sumo k.
Identi�car (−1) con el �brado tautológico, i.e. el sub�brado del �brado trivialℂPn × ℂn+1 cuya �bra sobre l = (�0 ∶ ⋯ ∶ �n) es la línea l en sí misma, i.e.
(−1) = {((�0 ∶ ⋯ ∶ �n), (�0,… , �n)) ∈ ℂPn × ℂn+1 ∶ �i�j = �j�i},
también conocido como el blowup de ℂn+1 en el origen. Deducir que (k) sepuede pensar cómo el �brado cuya �bra sobre l es l⊗−k si k < 0, y (l⋆)⊗k si k > 0.Identi�car (1) con el �brado de línea asociado al �brado de Hopf. Aquí, el�brado de línea asociado a un S1-�brado principal P → X es L = P ×S1 ℂ, elcociente de P × ℂ por la acción de G = S1 dada por g ⋅ (p, x) = (g ⋅ p, g−1 ⋅ x)(luego P se recupera de L, ya que es isomorfo a P ×S1 ×S1 ⊂ L).
Probar que Pic(ℂPn) = ℤ como grupos, dónde k ∈ ℤ se corresponde con (k).
8

Nota: Esto último es no trivial.
(B) (Divisores, de una variedad proyectiva a una variedad de Stein) Unahipersuper�cie (analítica) es una subvariedad compleja Y ⊂ X de codimensión(compleja) 1, de una variedad compleja X . Un divisor es una combinaciónlineal formal ∑i aiYi de hipersuper�cies, con ai ∈ ℤ; para este ejercicio sóloconsideraremos hipersuper�cies, que son casos particulares de divisores. Unaforma de conseguir tal divisor es considerar s ∈ Γ(L) una sección holomorfade un �brado de línea holomorfo L→ X , que es genérica en el sentido que estransversal a la cero sección, y considerar Y = Z (s) = {x ∈ X ∶ s(x) = 0} ⊂ X .
Dada X ⊂ ℂPn una subvariedad compleja (i.e. una variedad proyectiva), de-notamos X (k) = (k)|X (de tal forma que Γ(X ), con X = X (0), son lasfunciones holomorfas X → ℂ). Dada sk ∈ X (k) una sección holomorfagenérica, sk determina una trivialización de X (k) en Xk ∶= X ⧵Z (sk). Probarque (Xk , !k = d�k) es una variedad de Stein, dónde �k = −dℂ log ‖sk‖2. Comocaso particular, notar que U� = ℂPn⧵Z (s�1 ) dónde s�1 (�0 ∶ ⋯ ∶ �n) = �� es unasección de (1) = (1)ℂPn , Z (s1) ≅ ℂPn−1 ⊂ ℂPn es un divisor, y !1 = !FS |U� .
(5) (Curvatura, primer clase de Chern c1) Una métrica hermítica ℎ en un �brado de líneaholomorfo L→ X es una elección diferenciable de métricas hermíticas en cada �bra deL. Dada una sección s de L, denotamos ‖s‖2 = ℎ(s, s). Dada s una sección local holomorfas de L (que determina una trivialización local de L), de�nimos
Fℎ = −i2�
)) log ‖s‖2
en esta trivialización local. Probar que esto de�ne una (1, 1)-forma Fℎ ∈ Ω1,1(X ) global, lacurvatura de (L, ℎ).
Si ℎ es la métrica hermítica en (−1) inducida por la métrica hermítica estándard en ℂn+1,deducir que la curvatura de ((−1), ℎ) es −!FS . Más en general, probar que la curvaturade ((k), ℎ⊗k ) es k!FS , dónde ℎ⊗k (s⊗k , s⊗k ) = ℎ(s, s)k , si k ≠ 0.
La primer clase de Chern c1(L) ∈ H 2(X,ℝ) es por de�nición c1(L) = [Fℎ]. Probar quees independiente de ℎ. Probar que c1 ∶ Pic(X ) → ℤ es un homomor�smo de grupos.Probar que c1((k)) = k, bajo el isomor�smo H 2(ℂPn,ℤ) = ℤ dónde !FS se correspondecon 1 ∈ ℤ, y por lo tanto c1 induce un isomor�smo Pic(ℂPn) ≅ ℤ.
Nota: no es obvio que c1(L) ∈ H 2(X,ℤ), i.e. que es integral; se puede asumir para esteejercicio.
Probar que en el caso de que X sea una super�cie, c1 coincide con la clase de Eulere(L), de�nida cómo e(L) = #Z (s), i.e. el número algebraico (contado con signos) de losceros de una sección s de L transversal a la cero sección. Usando esto, reprobar quec1((k)) = k en el caso de X = ℂP 1 = S2, usando que los polinomios complejos de gradok, si k ≥ 0, se anulan genéricamente en k puntos distintos (y los ceros cuentan con signopositivo). Notar que en dimensión (real) dos, una hipersuper�cie regular es simplementeun conjunto �nito de puntos, y un divisor simplemente le asigna multiplicidades a lospuntos, lo cuál se puede pensar como las multiplicidades de los ceros/polos de unafunción meromorfa (dependiendo del signo).
(6) (variedades de Weinstein) Una variedad de Weinstein es una tupla (M,!, V , f ) dóndeMes una variedad abierta (no compacta, ó con borde), ! es una forma simpléctica exacta, f ∶
9

M → ℝ es una función exhaustiva y de Morse (generalizada), V es un campo de vectoresde Liouville para !, que es completo (su �ujo existe para todo tiempo), y es un (pseudo-)gradiente para '. Aquí, una función de Morse generalizada es aquélla que además depuntos críticos no degenerados, potencialmente admite puntos críticos degenerados detipo embriónico o muerte-nacimiento, i.e. el punto crítico p admite coordenadas localesx1,… , xm dónde p = 0 y f = f0 en la familia ft(x) = ft(0) ± tx1 + x31 −∑k
i=1 x2i +∑mi=k+1 x2j .
Un campo de vectores V es un pseudo-gradiente para ' si d'(V ) ≥ �(‖V ‖2 + ‖d'‖2) con� ∶ M → ℝ+ función positiva, y dónde la norma es con respecto a una métrica arbitraria.Notar que los puntos críticos de ' luego coinciden con los ceros de V , y un punto críticoes no degenerado (ó embriónico) para ' si lo es cómo cero de X .
Nota: Siempre se puede perturbar los puntos críticos embriónicos para hacerlos no degen-erados, pero la de�nición está diseñada para estudiar familias a 1-parámetro, dónde estospuntos críticos son inevitables. En este ejercicio se pueden ignorar los puntos críticos em-briónicos, incluídos en la de�nición sólo por completitud.
Deducir que toda variedad de Stein es Weinstein, y toda variedad de Weinstein es deLiouville. Probar que si Q es una variedad cerrada, luego (D⋆Q, !std ) es Weinstein.
Probar que todo conjunto de nivel regular '−1(c) hereda una estructura de contacto�p . Probar que la variedad estable W −
p (con respecto de V ) de todo punto crítico p esisotrópica (en el sentido simpléctico, i.e. !|W −
p = 0) e intersecta todo conjunto de nivelregular '−1(c) en una subvariedad isotrópica (en el sentido de contacto, i.e. tangente a�p). Deducir que los puntos críticos de ' tienen índice a lo sumo n, y por tanto todavariedad de Weinstein (y en particular toda variedad de Stein) de dimensión real 2n eshomotópicamente equivalente a un CW complejo de dimensión a lo sumo n.
Nota: un resultado profundo de Eliashberg dice que toda variedad de Weinstein se puededeformar a una variedad de Stein (y en particular existe una J integrable); este es uno delos resultados principales del libro [CE].
Un cobordismo de Weinstein es un cobordismo W orientable y diferenciable, i.e. unavariedad con borde )W = −M−⋃M+, que tiene una estructura de Weinstein (con laúnica diferencia que la condición de que ' sea exhaustiva se reemplaza con que M± seanconjuntos de nivel regulares con '|M− = min ', '|M+ = max ', y que V sea completo conque V sea entrante en M− y saliente en M+). Decimos que el cobordismo va de M− a M+.Deducir que M± heredan estructuras de contacto �±. Un relleno de Weinstein es cuandoM− = ∅, y (M+, �+) se dice Weinstein-rellenable. Deducir que un cobordismo (relleno) deWeinstein es un cobordismo (relleno) de Liouville.
(A) De�nir (o buscar en la literatura, e.g. el artículo original de Weinstein [Wei], lade�nición de) un asa de Weinstein de índice k, y deducir que toda variedad deWeinstein de dimensión 2n se construye asociando asas de Weinstein de índicesk ≤ n. De�nir formalmente la suma conexa (M1#M2, �1#�2) de dos variedades decontacto (Mi , �i), i = 1, 2, cómo el resultado de asociar un asa de Weinstein deíndice 1, y probar que existe un cobordismo de Weinstein de (M1, �1)⨆(M2, �2) a(M1#M2, �1#�2).
(B) Probar que si (Mi , �i) = OB(Pi , 'i), i = 1, 2, con Pi de Weinstein, vale que
(M1#M2, �1#�2) = OB(P1♮P2, '1◦'2),
10

dónde ♮ denota la suma conexa de Weinstein del borde (el resultado de asociar una1-asa de Weinstein a P1 ⊔ P2), y '1 conmuta con '2.
(C) Probar que si P es Weinstein, existe un cobordismo de Weinstein de OB(P, '1) ⊔OB(P, '2) a OB(P, '1◦'2).
Sugerencia: ver [Ad].
(7) (Espacios de prequantización) Sea � ∶ P → M un S1-�brado principal sobre unavariedad simpléctica (M,!), y � ∈ Ω1(P ) una conexión con curvatura !, i.e. d� = i
2� �⋆!,
�(|� ) = 1, dónde )� es el generador de la S1-acción en las �bras, y � es S1-invariante.Probar que � es una forma de contacto cuyo campo de Reeb es )� . La variedad decontacto (P, �) se llama una espacio (ó �brado) de prequantización, y son relevantespara la quantización geométrica (hot topic hoy en día, en la interacción con la mecánicacuántica).
(i) (Fibrado de Hopf) Probar que el �brado de Hopf � ∶ (S3, �std )→ (ℂP 1 = S2, !FS)es un espacio de prequantización, dónde !FS es la forma de Fubini-Study.
Más en general, Probar que (k)→ (ℂP 1, k!FS) admite una estructura de espaciode prequantización, si k ≥ 1, dónde abusamos notación y denotamos (k) cómo elS1-�brado principal asociado al �brado de línea holomorfo (k).
(ii) (Fibrado unitario de super�cies, y libro abierto adaptado) Sea Σ una super�-cie cerrada, orientable, con una métrica Riemanniana g. Consideramos el cotangenteunitario S⋆Σ, y su �brado de línea asociado L = T ⋆Σ. Recordar que la clase de Eulere(L) ∈ H 2(Σ,ℤ) = ℤ se calcula cómo e(L) = #Z (s), dónde s es una sección de Ltransversal a la cero sección (y es independiente de s). Probar que e(L) = −� (Σ),e(L⋆) = e(TΣ) = � (Σ).
Probar que la forma de Liouville estándar �std en S⋆Σ es una forma de prequanti-zación, i.e. satisface d�std = i
2� �⋆! dónde ! ∈ Ω2(Σ,ℤ) es una forma de área en Σ
(i.e. una forma simpléctica). Deducir que removiendo |� (Σ)| puntos distintos de Σ,i.e. considerando Σ̇ = Σ⧵{x1,… , x|� (Σ)|}, xi ≠ xj , i ≠ j, obtenemos un �brado trivialS⋆Σ̇ ≅ Σ̇ × S1 → Σ̇. Considerando discos disjuntos Di ≅ D2 centrados en los xi , y
denotando Σ̃ = Σ⧵ ∪i Di , deducir que (S⋆Σ, �std ) = OB(Σ̃,∏|� (Σ)|i=1 �i), dónde �i es el
Dehn twist positivo a lo largo de )Di .
Usando que e(T ⋆S2) = −2, removiendo el polo Norte y el polo Sur de S2, reprobarque (ℝP 3, �std ) = OB(D⋆S1, � 2), con � el Dehn twist a lo largo de la cero seciónS1 ⊂ D⋆S1.
Nota: La contractibilidad de (M,!) es el gran insight de Gromov, i.e. el espacio de J compati-bles, para una variedad simpléctica dada, no tiene topología. Esto es fundamental a la hora deestudiar espacios de moduli de curvas J -holomorfas. En caso de que M sea además una variedadcompleja (e.g. Kähler), uno primero intenta entender las curvas para el caso integrable (dónde laJ es integrable), luego deforma la J en el espacio (M,!), obteniendo información de los espaciosde curvas para la J deformada, que puede estar muy lejos de ser integrable. La analogía con de-formar un sistema dinámico integrable a un sistema caótico es clara. A diferencia de los métodosperturbativos, dónde sólo se perturba la dinámica en vez de considerar deformaciones “grandes”(por ej. la teoría de KAM), las curvas holomorfas sobreviven éstas deformaciones grandes. Lo queestá detrás, y que gobierna la deformación, es el hecho de que la linearización de la ecuación de
11

Cauchy-Riemann es un operador de Fredholm, y los elementos de su núcleo satisfacen una EDPelíptica. Esto es lo que permite a Hofer-Wysocki-Zehnder obtener libros abiertos adaptados a ladinámica en la regularización de Levi-Civita del problema de los tres cuerpos (cuando tenemosconvexidad, que en un principio es una propiedad no perturbativa). Más de esto en las clases quesiguen... En otra dirección, más topológica que dinámica, una pregunta central en la topología decontacto, de intensa actividad actual, es determinar que estructuras de contacto admiten rellenossimplécticos (fuertes, débiles, de Liouville, Stein, Weinstein,...) y en caso a�rmativo, cuántos (amenos de simplectomor�smo, difeomor�smo, equivalencia homotópica,...), y que estructuras decontacto se relacionan por cobordismos (fuertes, etc).
References[Ad] Russell Avdek. Liouville hypersurfaces and connect sum cobordisms. ArXiv preprint
arXiv:1204.3145.
[CE] Cieliebak, Kai; Eliashberg, Yakov. From Stein to Weinstein and back. Symplectic geometryof a�ne complex manifolds. American Mathematical Society Colloquium Publications, 59.American Mathematical Society, Providence, RI, 2012. xii+364 pp. ISBN: 978-0-8218-8533-8
[MF] Mitchell Faulk, First Chern classes of Kähler manifolds.http://math.columbia.edu/ faulk/FirstChernClass.pdf
[GH] Gri�ths, Phillip; Harris, Joseph. Principles of algebraic geometry. Reprint of the 1978original. Wiley Classics Library. John Wiley & Sons, Inc., New York, 1994. xiv+813 pp.ISBN: 0-471-05059-8.
[Huy] Huybrechts, Daniel. Complex geometry. An introduction. Universitext. Springer-Verlag,Berlin, 2005. xii+309 pp. ISBN: 3-540-21290-6
[KvK] Kwon, Myeonggi; van Koert, Otto. Brieskorn manifolds in contact topology. Bull. Lond.Math. Soc. 48 (2016), no. 2, 173–241.
[MS] McDu�, Dusa; Salamon, Dietmar. Introduction to symplectic topology. Third edition.Oxford Graduate Texts in Mathematics. Oxford University Press, Oxford, 2017. xi+623 pp.ISBN: 978-0-19-879490-5; 978-0-19-879489-9.
[Wei] Weinstein, Alan. Contact surgery and symplectic handlebodies. Hokkaido Math. J. 20(1991), no. 2, 241–251.
12