Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
111
. '" . ' ," " " . ' . . . . " T E R C E R A E D IC IÓ N CD -R OM incluido DISEÑO DE . MECANISMOS ANÁLISIS y SÍNTESIS . , , , , ARTHUR G. ERDMAN • GEORGE N. SANDOR
-
Upload
teddy-eferson -
Category
Documents
-
view
613 -
download
40
Transcript of Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 1/111
.'".' ,""". ' . . . . ""
TERCERA EDICIÓN
CD-ROMincluido
DISEÑO DE.MECANISMOSANÁLISIS ySÍNTESIS
. ,,,,
ARTHUR G. ERDMAN • GEORGE N. SANDOR

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 2/111
. .. ' " . -/'
t-.
TERCERA EDICIÓNCD-ROMincluido
DISEÑO DEMECANISMOS
. '., •. "'.
/
~
• •
' -
b
';-~
¡
~
,;:!
ANÁLISIS Y SÍNTESIS. . . • . . . ~
ARTHUR G. ERDMANGEQRGE N. SANDOR
rt
.Estk' nueva edición'va acompañada de un CD-ROM que C011.Stae más de 90.'"videó-clips sobre mecanismos reales y animación por computadora; además;incluye referencias cruzadas de ejemplos tomados de la industria y de proyectosde diseño para el estudiante que ppeden localizarse a lo largo de todo el libro.
. \
Se han añadi.do más de 60 problerftas nuevos, insertados en los capítulos, o biencorno ejercicios de fin de capítulo. Ginco de los capítulos contienen seccionesque han sido revisadas. ,. " "
Es;a modern~ introducci~n al diseño de mecanismos pr~or~ona a..Lkctor basesteóricas suficientes, no solo para ~mprender, S1110~ aplicar las capacidades dSrdiseño yanálisis en la práctica de la ingeniería. Stbien el libro se centra en los métodosanalític<!s con ayufdl~e la computadora, también se proporcionan métodos !
I 4" -c
gráficos para explicar cabalmente los principios básicos. ;. .- . .Algunos de los temas que se abo.rdan:
,..;
• Los fundamentos del diseño moderno' •'. TécnJcas de diseño con a~}1a.,sle computadora .
• Métodos de análisis ~e',ª,~~laiarniento, velocidad y ventaja mecánica
• Técracas de análisis - d e iceleraci<?n y fuet'za: ;
• Estrategias de diseño de levas .
• Engranes y trenes de engranes• 7, ~.- ~ Sínte\.s cinemática ..' ..~. ..
'.¡
' o>,.. '
"
Visítenos en Internet en:http://wvvw.prentice.com.mx
' .
IS »N-970-17:0 163-1 .
J · I r.~n?·89~01 701638
~ . • . ¿
, .~"•• .• ;t" i
. . • .> ;••...• ,''f
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 3/111
H
ssusU
SU
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 4/111
PRENTICEHALL
MÉXICO· NUEVA YORK· BOGOTÁ· LONDRES· MADRIDMUNICH • NUEVA DELHI • PARÍS· RÍo DE JANEIRO • SIDNEY
SINGAPUR • TOKIO· TORONTO • ZURICH
Diseñode mecanismos
Análisis y síntesisTercera edición
ARTHUR G. ERDMANMorse Alumni Distinguished Teaching Professor
of Mechanical Engineering
University of Minnesota
GEORGE N. SANDORResearch Professor Emeritus
of Mechanical Engineering
University of Florida
TRADUCCiÓN: José de la Cera
Ingeniero CivilUNAM Diplom Ingenieur
Roberto Escalona
Traductor Profesional
REVISiÓN TÉCNICA: Cuitláhuac Osornio Correa
Maestro en IngenieríaFacultad de Ingeniería - UNAMCoordinador de Carrera Ingeniería Mecánica y EléctricaUniversidad Iberoamericana
•
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 5/111
/ Datos de catalogación bibliográfica
PRENTICE HALL
MEXICO.I99
15B:\: 970-17-0163-1
.ÁREA: lflI.'lVERSIT ARIOS
FO~lA TO: 19 x 23.5 PÁGINAS: 664
' 1 1
Erdman, Arthur G./Sandor, George N.
Diseño de mecanismos, análisis y síntesis, 3a. Ed,
EDICIÓN EN ESPAÑOL:
EDITOR:
SUPERVISORA DE TRADUCCIÓN:
SUPERVISOR DE EDICIÓN:
EDICIÓN EN INGLÉS:
PABLO EDUARDO ROIG VÁZQUEZ
~1A. TERESA SANZ FALCÓN
MAGDIELGÓMEZMAroNA
Acquisitions editor: WILLIAM STENQUIST
Editor-in-chief: MARCIA HaRTO
Production editor: IRWIN ZUCKER
Managing editor: BA YANI ME1\lX>ZA DE LEO~'
Cover designer: JAYNE CaNTE
Director of production and manufacmring: DAVID W. RICCARDIManufacturing buyer: JULIA ~1EEH..\..'Editorial assistant: MARGARET \\"EIST
Traducido del ingl
Miembro de la Cámara Nacional de la Industria Editorial, Reg. Núm 1524.
Original English Language Edition Published by Prentice Hall, Inc
A Simon & Schuster Company
Copyright © 1997
Al! rights reserved
•00
ion from English language edition published by Prentice Hall, Inc.
derecbas reservséos, TI3ducción autorizada de la edición en inglés publicada por Prentice Hall, Inc-
oí this book may be reproduced or transmitted in any form or by any means,
loding photocopying, recording or by any information storage and retrievalpernrissio;:¡ in writing from the publisher.
Prohibida la reproducción total o parcial de esta obra, por cualquier medio o método sin autorización
por escrito del editor.
Derechos reservados e1998 respecto a la primera edición en español publicada por:
Prentice Hall Hispanoamericana, S.A.Calle 4 1\"!I25-22piso Fracc. Ind. Alce Blanco,Naucalpan de juárez, Edo. de México,c.p 53370
ISBN 970-17-0163-1
1 . IT O G A A I l C A I NG JV .M EX . SA DE cs .C EN Ti N O N O. 1 6 2 - 1
MEX K: O ,DJ .
c . P . 0 9 8 1 0
ISBN 0-13-267782-2
IMPRESO EN MÉXICO / PRINTED IN MEXICO
3 0 0 0 , • • •
• •
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 6/111
\ 1
ArtErdmandedica esta obra
a su esposa Mary Jo,a sus hijas Kristy y Kari
y a su hijo Aaron.Da gracias al Señor
por bendecirloy por haberle
permitido aportarsu contribucióna este libro.
George Sandordedica esta obra
a su esposaMagdi.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 7/111
Acerca de la portada
La portada de este libro ilustra el desarrollo de la cámara Polaroid Captiva. La animación porcomputadora del mecanismo de apertura de la cámara la proporcionó John Pilgrim, estudian-
te de posgrado de la University ofMinnesota. El dibujo de la vista en sección de la cámara lorealizó Elaine C. Pethigal. La portada es un diseño de Grant Bistram. El mecanismo de seisbarras es un diseño de Bruce Vierstra y se publicó con autorización de Polaroid Corporationen "Redesign ofPolaroid's Captiva Camera Mirror Positioning Mechanism". Este trabajo ob-tuvo en 1995 el primer premio en la Cuarta Conferencia sobre Mecanismos Aplicados yRobótica, en Cincinnati, Ohio.
Por desgracia, Bruce murió trágicamente en abril de 1996, como consecuencia de unaccidente. Echaremos mucho de menos su actitud entusiasta hacia la vida y hacia su profe-sión. Este mecanismo de apertura de la cámara ilustra la agudeza de Bruce en el campo de lacinemática, donde utilizó su preparación en el Worcester Polytechnical Institute y en PurdueUniversity, sus conocimientos teóricos de cinemática, y sus herramientas de síntesis y diná-mica ayudadas por computadora. Me siento dichoso y afortunado de haber conocido a Brucey trabajado con él. Mi profunda simpatía para su esposa Kathleen y sus tres hijas.
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 8/111
Contenido
IN MEMORIA M xi
PREFACIO xiii
1 INTRODUCCiÓN A LA CINEMÁTICAy MECANISMOS 1
1.1 Introducción 11.2 Movimiento 1
1.3 El eslabonamiento de cuatro barras 2
1.4 Movimiento relativo 9
1.5 Diagramas cinemáticos 9
1.6 Cadenas de seis barras 14
1.7 Grados de libertad 21
1.8 Análisis versus síntesis 301.9 Ejemplo de diseño de un mecanismo:
Transmisión de velocidad variable 30
Problemas 40
2 PROCESO DE DISEÑO DE UN MECANISMO 96
2.1 Introducción 96
2.2 Las siete etapas del diseño en ingeniería con ayuda de computadora 96
2.3 Cómo se relacionan las siete etapas en este texto 1012.4 La necesidad de mecanismos 102
2.5 Categorías de diseño y parámetros de los mecanismos 107
vü
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 9/111
viii Contenido
2.6 Guía para la resolución de problemas:
Síntomas, causas y fuentes de ayuda 113
2.7 Historia del diseño de mecanismos con ayuda de computadora 116
3 ANÁLISIS DE DESPLAZAMIENTO Y VELOCIDAD 119
3.1 Análisis de desplazamiento: Índices útiles para el análisisde posición de mecanismos 119
3.2 Análisis de desplazamiento: Método gráfico 131
3.3 Análisis de desplazamiento: Método analítico 135
3.4 Concepto del movimiento relativo 137
3.5 Análisis de velocidad: Método gráfico 139
3.6 Análisis de velocidad: Método analítico 149
3.7 Centros instantáneos 1523.8 Análisis de velocidad usando centros instantáneos 160
3.9 Ventaja mecánica 165
3.10 Método analítico para la determinación de velocidadesy ventaja mecánica 176
3.11 Programa de computadora para el análisis cinemáticode un eslabonamiento de cuatro barras 181
Apéndice: Repaso de números complejos 183
Problemas 192Ejercicios 232
4 ANÁLISIS DE ACELERACIÓN 233
4.1 Introducción 233
4.2 Diferencia de aceleración 2344.3 Aceleración relativa 2394.4 Aceleración de Coriolis 243
4.5 Mecanismos con ranuras curvas y conexionesde pares superiores 263
Problemas 268
5 INTRODUCCIÓN A LA DINÁMICADE MECANISMOS 291
5.1 Introducción 291
5.2 Fuerzas de inercia en eslabonamientos 2965.3 Análisis cinetoestático de mecanismos 305
5.4 El método de superposición (gráfico y analítico) 305
5.5 Ejemplo de diseño: análisis de un sistema impulsor
de velocidad variable 3135.6 El método matricial 321
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 10/111
Contenido ix
5 . 7 Comentarios sobre los métodos de superposición y matricialde la cinetoestática 337Problemas 339
9 6 DISEÑO DE LEVAS 353
6 . 1 Introducción 3536 . 2 Tipos de levas y seguidores 354 , .
6 . 3 Síntesis de leva 3586 . 4 Diagramas de desplazamiento: Desarrollo gráfico 3606 . 5 Diagramas de desplazamiento: Desarrollo analítico 3686 . 6 Técnicas avanzadas para perfil de levas 3746 . 7 Síntesis gráfica de perfil de levas 3886 . 8 Síntesis analítica de perfil de levas 3906 . 9 Síntesis de levas para seguidor remoto 4006 . 1 0 Eslabonamientos modulados de levas 406
Problemas 416
7 ENGRANES Y TRENES DE ENGRANES427
7 . 1
7~2
7 . 3
7 . 4
7 . 5
7 . 6
7 . 7
7 . 8
Introducción 427
Nomenclatura de dientes de engranes 432Formado de dientes de engranes 436Trenes de engranes 438Trenes de engranes planetarios 445El método de la fórmula 453El método tabular 460El método de centros instantáneos
(o de velocidad tangencial) 464Cargas sobre los dientes y flujo de potencia en sistemasde engranajes planetarios ramificado s 470
Problemas 478
7 . 9
8 INTRODUCCIÓN A LA SíNTESIS CINEMÁ TICA:MÉTODOS ANALíTICOS GRÁFICOS Y LINEALES
4948 . 1
8 . 2
8 . 3
8 . 4
8 . 5
Introducción. 494
Tareas de la síntesis cinemática 496Síntesis de tipo 506Herramientas de síntesis dimensional 519Síntesis gráfica-generación de movimiento:
dos posiciones prescritas 519Sintesis gráfica-generación de movimiento:
tres posiciones prescritas 522
8 . 6
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 11/111
x Contenido
8.7
8.8
8.9
8.10
8.11
8.12
8.13
8.14
8.15
8.16
8.17
8.18
8.19
8.20
8.21
8.22
8.23
8.24
Síntesis gráfica para generación de trayectorias:tres posiciones prescritas 523
Generación de trayectorias con temporización prescrita:tres posiciones prescritas 524
Síntesis gráfica para generación de trayectorias(sin temporización prescrita): cuatro posiciones 526Generador de función: tres puntos de precisión 528El método de superposición 533Técnicas de síntesis analítica 534Introducción a la síntesis analítica 535La forma de díada estándar 542Número de posiciones prescritas y núinerode opciones libres 546Tres posiciones prescritas para generaciónde movimientos, trayectorias y funciones 548Ejemplos de síntesis con tres puntos de precisión 554Círculos de los puntos centrales y puntos circulares 560Especificación del pivote de tierra 568Extensión de la síntesis con tres puntos de precisión
a mecanismos con múltiples circuitos 571Ecuación de Freudenstein para generaciónde funciones de tres puntos 575
Técnica de ecuación de cierre de circuito 578Síntesis de orden: generación de funcionescon cuatro barras 581Síntesis con tres puntos de precisión: Analítica y gráfica 584Apéndice: Estudio de caso-Síntesis de tipo de mecanismosde ventana a bisagra 584Problemas 604
RESPUESTAS A PROBLEMAS SELECCIONADOS 627
REFERENCIAS 630
íNDICE ,- 641
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 12/111
xi
In memoriam
7
Todos estamos tristes por el fallecimiento del Dr. George N. Sandor durante la preparación
de la tercera edición de este libro. George fue profesor e ingeniero de renombre mundial, granamigo y activo participante en la comunidad cinemática. A la edad de 84 años era Profesor
Investigador Emérito retirado y había sido Director del Laboratorio de Diseño de Ingeniería. Mecánica de la University ofFlorida en Gainesville. El Dr. Sandor impartió clases anterior-
mente en el Rensselaer Polytechnic Institute y en las Universidades de Yale y Columbia. Fue
Profesor de Diseño de Mecanismos en la Fundación ALCOA, entre 1966 y 1975, Ytrabajóen la industria estadounidense durante 21 años antes de comenzar su trabajo de posgrado en
Columbia. En ese período hizo numerosas contribuciones, entre las que se cuenta la primera
prensa a color para la revista Life.
El Dr. Sandor obtuvo su Doctorado en Ciencias de la Ingeniería en Columbia Univer-
sity en 1959 y, en 1986, recibió el título de Doctor Honoris Causa en Ingeniería Mecánica
por la Technological University, University ofBudapest, Hungría. Se convirtió, así, en el pri-
mer ingeniero mecánico, en los últimos 19 años, que recibía ese honor, y fue también electo
Miembro Honorario de la Academia Húngara de Ciencias.
El Dr. Sandor escribió más de 140 artículos técnicos, científicos y educativos, e inven-tó o co-inventó seis patentes en circulación. En total, asesoró a más de 50 estudiantes demaestría y doctorado. El Dr. Sandor fue Life Fellow del ASME y miembro de la Academia
de Ciencias de Nueva York; recibió numerosos honores entre los que se cuentan el Premio de
Diseño de Máquinas del ASME y el Premio de Mecanismos Aplicados de la OSu. Es uno
de los Profesores Distinguidos de Estados Unidos y su nombre figura en Who 's Who in Ame-
rica y en American Men and Women o/ Science.Por otra parte, el Dr. Sandor ocupó numerosos cargos administrativos, ejecutivos, di-
rectivos y de ingeniería, en las áreas de diseño de maquinaria, manufactura y desarrollo e
investigación. Este libro recibe el beneficio de esas experiencias, que comprenden la Hunga-
rian Rubber Co. (afiliada con Dunlop Ltd.), Babcock Printing Press Corp., H.W. Faeber Corp.,
y TIME Inc. Fue miembro de la mesa directiva de Huck Co., de 1963-70 y poseía licencias
de ingeniero profesional en Florida, Nueva York, Carolina del Norte y Nueva Jersey.
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 13/111
- - r
xi i In memoriam
El Dr. Sandor fue un entusiasta piloto, marino, músico y laureado poeta que hablabasiete idiomas. Su interés en la aviación duró más de 50 años. Siendo estudiante de la Uni-versity of Polytechnics in Budapest, Hungría, ayudó a diseñar un biplano de cabina abiertapara dos pasajeros, para un proyecto académico. A diferencia de muchos proyectos estudian-tiles, el prototipo de ala escalonada de Sandor voló perfectamente al primer intento.
George será recordado por su bondad, sabiduría y curiosidad ilimitada en el campo dela cinemática. Sus contribuciones a la ciencia y aplicación de los mecanismos son muchas yquedan patentes en este libro. Su entusiasmo por la vida y la investigación no tienen proba-blemente parangón. George está ahora con el Señor, donde continúa descubriendo los secretosde más allá de la vida.
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 14/111
xiii
ablabala Uni-abiertadian-
po de
chas yproba-
Prefacio
El trabajo original en dos volúmenes, que comprendía el Volumen 1, Mechanism Designs:Analysis and Synthesis, y el Volumen 2, Advanced Mechanism Design: Analysis and Synthe-sis, se desarrolló a lo largo de 15 años, principalmente a partir de la enseñanza, investigacióny práctica de asesoría de los autores, con contribuciones de sus colaboradores y con adapta-ciones de artículos publicados. Este trabajo representaba la culminación de las investigaciones
sobre un método general de análisis y síntesis en cinemática, dinámica y cineto-elastodiná-mica que comenzó con la tesis del Dr. Sandor bajo la dirección del Dr. Freudenstein enColumbia University.
Los temas sobre los que versan esos dos volúmenes fueron seleccionados con la finali-dad, por una parte, de proporcionar al estudiante una base teórica suficiente que le permitieraentender los procedimientos del diseño contemporáneo de las técnicas de mecanismos y, porotra, de desarrollar la habilidad para poner en práctica esas teorías. Otra finalidad fue que loslibros sirvieran como referencia al diseñador profesional y como una fuente de trabajo parael investigador. Con este propósito, el enfoque se centra en el diseño de mecanismos con ayu-da de computadora.
Los autores están agradecidos con muchos colegas que hicieron contribuciones a la pri-mera edición: John Gustafson, Lee Hunt, Tom Carlson, Ray Giese, Bill Dahlof, Tom Chase,Sem Hong Wang, Dr. Sanjay G. Dhandi, Dr. Patrick Starr, Dr. William Carson, Dr. Charles
F. Reinholtz, Dr. Manuel Hemández, Martín Di Girolamo, Xirong Zhuang Yotros.La segunda edición del Volumen 1 se basó en la retroalimentación proveniente de
más de cien instituciones de Estados Unidos y de otros países, incluyendo las propias uni-versidades de los autores. Varios capítulos fueron reorganizados y se agregaron más de 50problemas y ejemplos nuevos. Además, se incluyeron varias páginas a color que ilustranmecanismos tratados en el texto o copias de métodos de diseño de mecanismos generadosen computadora. El Dr. Sridhar Kota, de la University ofMichigan, contribuyó con las ilus-traciones. Otra novedad en esa edición fue un disco para IBM como suplemento a los capítulos3,4,6 y 8. Los iectores podían diseñar, así, eslabonamientos de cuatro barras para tres po-siciones de diseño y luego analizar el mecanismo sintetizado. A su vez, una opción deldiseño completo de una leva ilustraba los conceptos presentados en el capítulo 6. Las prin-cipales contribuciones al desarrollo de los programas se debieron a Chris Huber, Ralph
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 15/111
xiv Prefacio
Peterson, Mike Lucas y el Center for Advanced Manufacturing, Design and Control de laUniversity ofMinnesota.
Los autores agradecen las contribuciones a la segunda edición de sus colegas: Dr. TomChase, John Titus, Dr. Donald Riley, Dr. Albert C. Esterline y Dr. Harold Johnson. Otras per-sonas que participaron fueron Jon Thoreson, Elizabeth Logan, Greg Vetter, Gary Bistram, enel trabajo fotográfico, así como el Dr. Suren Dwivedi.
La tercera edición del Volumen 1 es el resultado de mejoras adicionales al texto. Seagregaron más de 60 nuevos problemas y ejemplos. Muchos de esos problemas se tomaronde la industria, de patentes o soluciones a necesidades prácticas. Varios capítulos han sidomodificados con la idea de simplificar la enseñanza del material. Por ejemplo, en el capítulo 2se agregó un enfoque de bloques constructivos al diseño de mecanismos con base en suge-rencias del Dr. Sridhar Kota de la University ofMichigan. En el capítulo 7, la sección sobretrenes de engranes planetario s se mejoró con la ayuda del Dr. Frank Kelso, profesor adjuntoen la University ofMinnesota. En el capítulo 8, la introducción a la síntesis analítica se mo-dernizó agregando un ejemplo de diseño y revisando el método de números complejos. Elcapítulo 1 contiene nuevos ejemplos de tareas de mecanismos. En resumen, el libro ha sidoconsiderablemente revisado con base en contribuciones de los estudiantes y profesores.
Un cambio importante en la tercera edición es el CD-ROM que incluye más de 90 ani-maciones de mecanismos reales y generados por computadora. El lector advertirá el icono §]al margen de la página, lo que significa que ese mecanismo particular se encuentra en el CD-
ROM. Los autores dan las gracias a James Holroyd, estudiante graduado de la University ofMinnesota por su pericia en la generación de este CD-ROM. Su trabajo se basa en la tesis delicenciatura de Nick Gamble y en los ejemplos de LINCAGES generados por Phil Schlangen.Muchas de las animaciones fueron desarrolladas con el software de LINCAGES. Versionescorregidas y puestas al día (cuando es necesario) de esas animaciones, pueden obtenerse enla página de los sitios Web y FTP de Prentice Hall. Para obtener información de cómo lograracceso a este material, vea la página de catálogo de este libro (versión en inglés) en el sitioWeb (www.prenhall.com).
En adición a los colegas mencionados antes, los autores quisieran dar las gracias porsus contribuciones a esta tercera edición, a las siguientes personas: Dr. Tom Chase de la Uni-versity ofMinnesota, al Dr. Jenny Holte, ahora en la University ofWisconsin, en Plattville,así como a Raed Rizq, David Wulfman, Tim Berg, Jim Warren y Boyang Hong, todos ellosestudiantes de posgrado de la University of Minnesota y a Stephanie Clark por su ayuda en
la realización del manuscrito.
Artbur G. Erdman
George N. Sandor
George N. Sandor añade, para finalizar el prefacio, un poema que preferimos trans-cribir en inglés, pues, en la traducción, que incluimos a continuación del inglés, se pierdenla rima y el ritmo originales. (N. de la revisora).
This book deals with KinematicsSynthetics and Analytics
Written with love ofthe Science
Keeping in mind Student Clients!
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 16/111
Prefacio xv
Making easier to studyMotion of the Linkage Body
How they move in plane and Three DeeMakes it clear and leaming easy!
That's the goal ofthis one writerOther author even brighter!
So, we wish you happy readingMay your study eam high grading!
.90 ani-
§]el CD-
rsity oftesis delangen.
e enlograrel sitio
Este libro, sobre CinemáticaSíntesis y Analítica
Se ha escrito con amor a la Ciencia¡Sin olvidar al estudiante!
Al facilitar el estudiodel movimiento de los eslabonarnientos,
y cómo se mueven en dos y tres dimensiones,¡es más clara y fácil su comprensión!
Éste es el propósito de este autor,(¡el otro autor es aún más brillante!)
[Feliz aprendizaje!, entonces,¡y que el estudio te procure altas calificaciones!
ias porla Uni-ille,
os ellosuda en
Highland, North Carolina, Mayo 9, 1994George N. Sandor
ErdmanSandor
trans-pierden
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 17/111
Capítulo 1
Introducción a la cinemáticay mecanismos
1.1 INTRODUCCIÓN
La matemática, lafisica y la química son las ciencias fundamentales en que se basa la inge-niería. En la mayoría de los casos, la ingeniería implica el análisis de la conversión de energíade alguna fuente hacia una o más salidas, usando uno o más de los principios básicos de esasciencias. La mecánica de sólidos es una de las ramas de la fisica que, entre otras, contieneotras tres ramificaciones principales: la cinemática, que trata del estudio del movimiento re-
lativo; la estática, que es el estudio de fuerzas y momentos, separados del movimiento, y lacinética, que trata de la acción de las fuerzas sobre los cuerpos. La combinación de la cine-mática y la cinética se denomina dinámica. Este texto descríbe la matemática, cinemática ydinámica necesarías para llevar a cabo el diseño de mecanismos.
Un mecanismo es un dispositivo mecánico que tiene el propósito de transferir el movi-miento y/o fuerza de una fuente a una salida. Un eslabonamiento consiste en eslabones (obarras) (véase la tabla 1.1), generalmente considerados rígidos, conectados por juntas (véasela tabla 1.2), como pasadores (o revolutas) o juntas prísmáticas, para formar cadenas (o la-zos) abiertas o cerradas. Tales cadenas cinemáticas, con un eslabón fijo como mínimo, son(1) mecanismos si, por lo menos, otros dos eslabones retienen movilidad, o (2) estructuras,si no hay movilidad alguna. En otras palabras, un mecanismo permite el movimiento relati-vo entre sus eslabones "rígidos"; una estructura, en cambio, no lo permite. Como loseslabonamientos forman mecanismos simples y pueden diseñarse para efectuar tareas com-
plejas, como movimientos no lineales y transmisión de fuerza, recibirán mucha atención eneste libro. Algunos de los procedimientos para el diseño de eslabonamientos presentados aquíson consecuencia de un resurgimiento de la teoría de los mecanismos basada en la disponibi-lidad de computadoras. M~chos de los métodos de diseño se descubríeron antes de la décadade los 60, pero los largos y tecliosos cálculos implicados, impidieron cualquier desarrollo ul-terior en aquella época.
1.2 MOVIMIENTO
Una gran cantidad de mecanismos tienen movimiento, de manera que todos los eslabones semueven en planos paralelos. Este texto se centra en este tipo de movimiento, llamado movi-miento plano o bidimensional. El movimiento plano de cuerpo rígido consiste en rotaciones
1
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 18/111
2 Capítulo 1 Introducción a la cinemática y mecanismos
respecto a ejes perpendiculares al plano del movimiento y en traslaciones en las que todoslos puntos del cuerpo se mueven a lo largo de trayectorias rectas o curvilíneas paralelas y to-das las líneas contenidas en el cuerpo permanecen paralelas a sus orientaciones originales. Encuanto a los mecanismos espaciales, permiten el movimiento en tres dimensiones. Son posiblescombinaciones de rotaciones respecto a un máximo de tres ejes no paralelos y traslaciones enun máximo de tres direcciones diferentes, dependiendo de las restricciones impuestas por lasjuntas entre eslabones (esféricas, helicoidales, cilíndricas, etcétera).
En el análisis de estos mecanismos se supone que todos los eslabones son cuerpos rígidos.En un segundo volumen de este texto (capítulo 5), esta suposición de cuerpo rígido se relaja yse supone entonces que los eslabones tienen propiedades elásticas. Sin embargo, por ahora man-tendremos nuestra hipótesis de cuerpo rígido para los eslabones de los mecanismos.
1.3 EL ESLABONAMIENTO DE CUATRO BARRAS
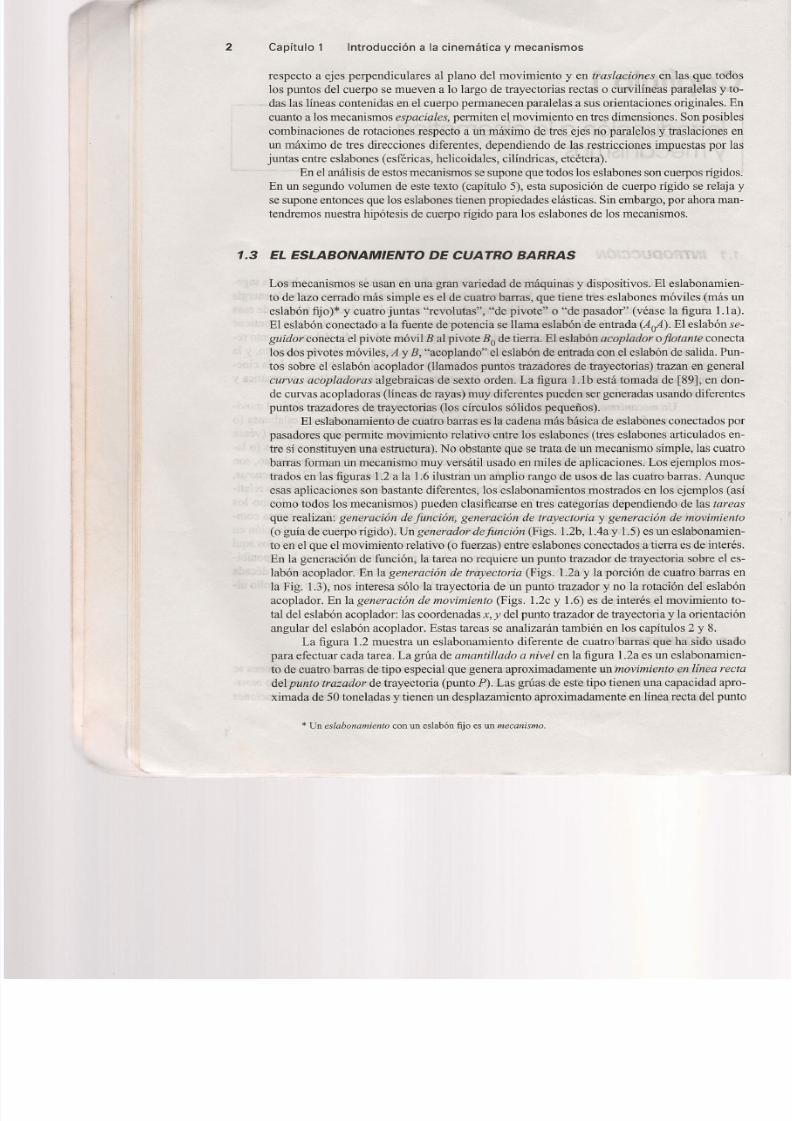
Los mecanismos se usan en una gran variedad de máquinas y dispositivos. El eslabonamien-to de lazo cerrado más simple es el de cuatro barras, que tiene tres eslabones móviles (más uneslabón fijo)* y cuatro juntas "revolutas", "de pivote" o "de pasador" (véase la figura 1.1a).El eslabón conectado a la fuente de potencia se llama eslabón de entrada (AoA). El eslabón se-guidor conecta el pivote móvil B al pivote Bo de tierra. El eslabón acoplador oflotante conecta
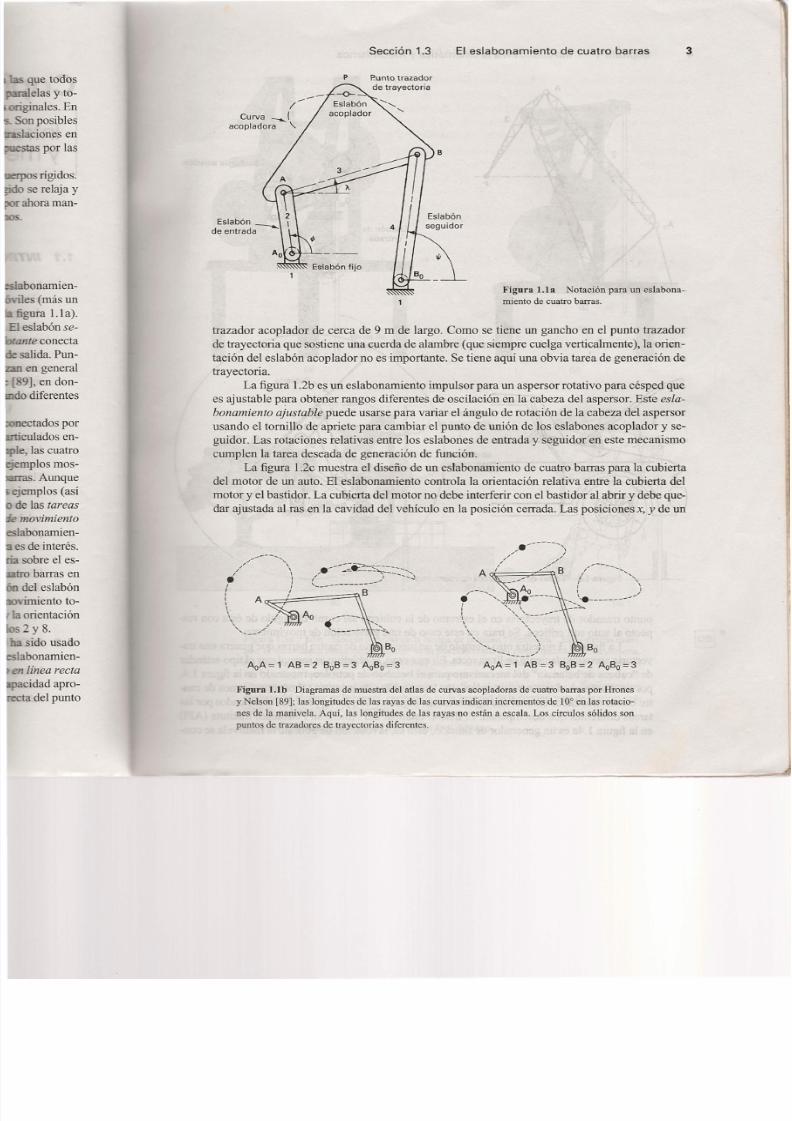
los dos pivote s móviles, A y B, "acoplando" el eslabón de entrada con el eslabón de salida. Pun-tos sobre el eslabón acoplador (llamados puntos trazadores de trayectorias) trazan en generalcurvas acopladoras algebraicas de sexto orden. La figura 1.1b está tomada de [89], en don-de curvas acopladoras (líneas de rayas) muy diferentes pueden ser generadas usando diferentespuntos trazadores de trayectorias (los CÍrculos sólidos pequeños).
El eslabonamiento de cuatro barras es la cadena más básica de eslabones conectados porpasadores que permite movimiento relativo entre los eslabones (tres eslabones articulados en-tre sí constituyen una estructura). No obstante que se trata de un mecanismo simple, las cuatrobarras forman un mecanismo muy versátil usado en miles de aplicaciones. Los ejemplos mos-trados en las figuras 1.2 a la 1.6 ilustran un amplio rango de usos de las cuatro barras. Aunqueesas aplicaciones son bastante diferentes, los eslabonamientos mostrados en los ejemplos (asícomo todos los mecanismos) pueden clasificarse en tres categorías dependiendo de las tareasque realizan: generación de función, generación de trayectoria y generación de movimiento
(o guía de cuerpo rígido). Un generador de funcion (Figs. l.2b, l.4a y 1.5) es un eslabonamien-to en el que el movimiento relativo (o fuerzas) entre eslabones conectados a tierra es de interés.En la generación de función, la tarea no requiere un punto trazador de trayectoria sobre el es-labón acoplador. En la generación de trayectoria (Figs. 1.2a y la porción de cuatro barras enla Fig. 1.3), nos interesa sólo la trayectoria de un punto trazador y no la rotación del eslabónacoplador. En la generación de movimiento (Figs. 1.2c y 1.6) es de interés el movimiento to-tal del eslabón acoplador: las coordenadas x, y del punto trazador de trayectoria y la orientaciónangular del eslabón acoplador. Estas tareas se analizarán también en los capítulos 2 y 8.
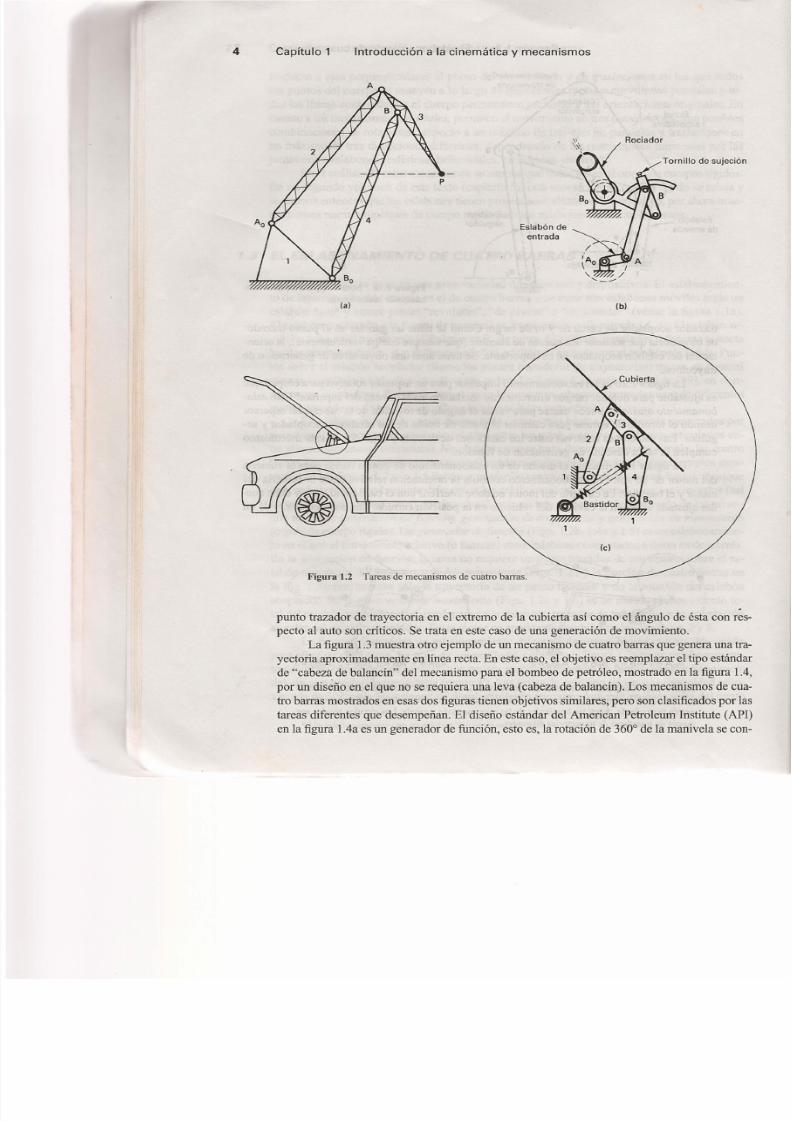
La figura 1.2 muestra un eslabonamiento diferente de cuatro barras que ha sido usadopara efectuar cada tarea. La grúa de amantillado a nivel en la figura l.2a es un eslabonamien-to de cuatro barras de tipo especial que genera aproximadamente un movimiento en línea rectadel punto trazador de trayectoria (punto P). Las grúas de este tipo tienen una capacidad apro-ximada de 50 toneladas y tienen un desplazamiento aproximadamente en línea recta del punto
* Un eslabonamiento con un eslabón fijo es un mecanismo.
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 19/111
e todosy to-
les. Enosiblesones enpor las
rígidos.relaja yra man-
-(más un
l .La).
bón se-conecta
da. Pun-generalen don-rentes
Sección 1.3 El eslabonamiento de cuatro barras 3
p
/--
Curva - . . . . 1acopladora \.
Figura 1.1a Notación para un eslabona-o
miento de cuatro barras,
trazador acoplador de cerca de 9 m de largo. Como se tiene un gancho en el punto trazadorde trayectoria que sostiene una cuerda de alambre (que siempre cuelga verticalmente), la orien-
tación del eslabón acoplador no es importante. Se tiene aquí una obvia tarea de generación detrayectoria.
La figura l.2b es un eslabonamiento impulsor para un aspersor rotativo para césped quees ajustable para obtener rangos diferentes de oscilación en la cabeza del aspersor. Este esla-bonamiento ajustable puede usarse para variar el ángulo de rotación de la cabeza del aspersorusando el tomill'o de apriete para cambiar el punto de unión de los eslabones acoplador y se-guidor. Las rotaciones relativas entre los eslabones de entrada y seguidor en este mecanismocumplen la tarea deseada de generación de función.
La figura l.2c muestra el diseño de un eslabonamiento de cuatro barras para la cubiertadel motor de un auto. El eslabonamiento controla la orientación relativa entre la cubierta delmotor y el bastidor. La cubierta del motor no debe interferir con el bastidor al abrir y debe que-dar ajustada al ras en la cavidad del vehículo en la posición cerrada. Las posiciones x, y de un
"" . . • "" '--- . .. .. • • •, - ,/ '/ '. \
I 'I I
I I
~ Ao:::.;=,' ~\ ', .\,
" , /
----"
(~~~:~.~~)--:::::::::.~ < & - = - ' \\
1
1
••••..---- .
I 'I "
I '
I '\ I
" -... -- --- --_/-_ ':: : .. • . . .
/ . •.-- . . . • . .. • .. - ,III\
\,\
". . . • . .. .• . .. . • . . . . . ... • . _ - - - - _ . •. /
AoA = 1 AB = 2 BoB = 3 AoBo = 3 AoA = 1 AB = 3 BoB = 2 AoBo = 3
Figura 1.1b Diagramas de muestra del atlas de curvas acopladoras de cuatro barras por Hrones
y Nelson [89]; las longitudes de las rayas de las curvas indican incrementos de 10° en las rotacio-
nes de la manivela. Aquí, las longitudes de las rayas no están a escala. Los círculos sólidos sonpuntos de trazadores de trayectorias diferentes,
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 20/111
4 Capítulo 1 Introducción a la cinemática y mecanismos
(a)
' N P - ~ ! C
Figura 1.2 Tareas de mecanismos de cuatro barras.
\' R .\~\ . ociador
Eslabón deentrada
Tornillo de sujeción
(b)
(C)
punto trazador de trayectoria en el extremo de la cubierta así como el ángulo de ésta con res-pecto al auto son críticos. Se trata en este caso de una generación de movimiento.
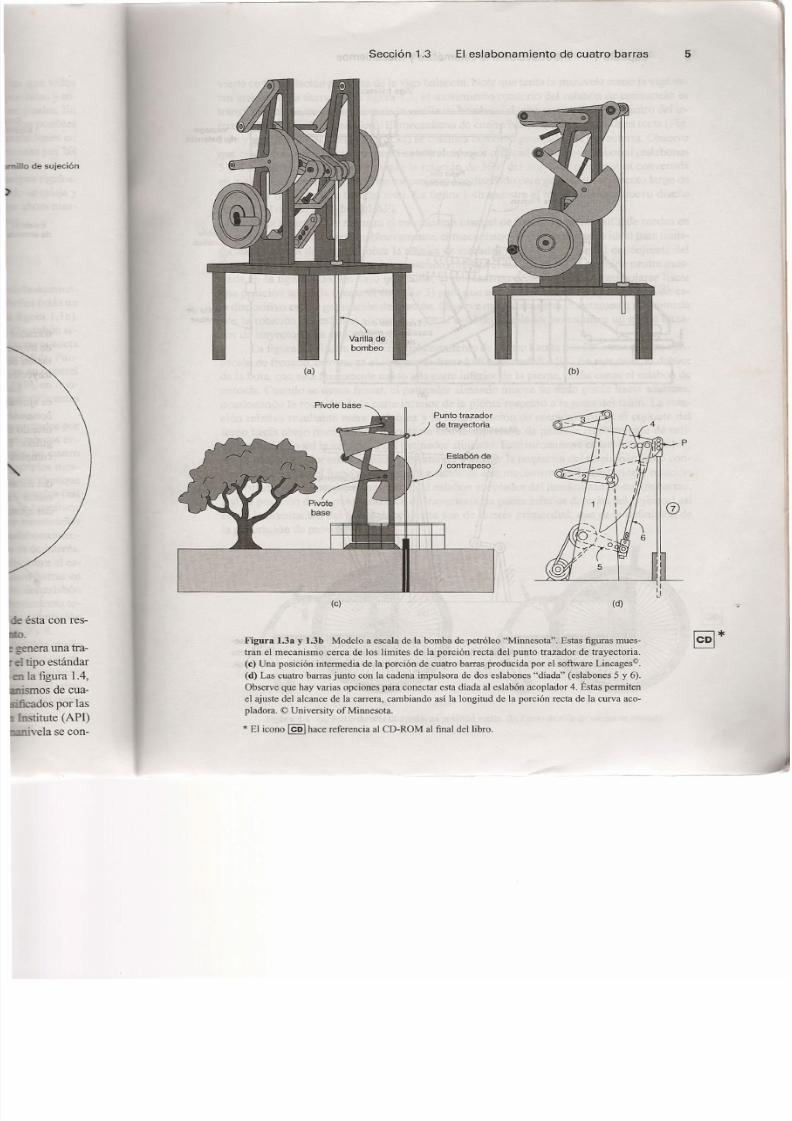
La figura 1.3 muestra otro ejemplo de un mecanismo de cuatro barras que genera una tra-yectoria aproximadamente en línea recta. En este caso, el objetivo es reemplazar el tipo estándarde "cabeza de balancín" del mecanismo para el bombeo de petróleo, mostrado en la figura 1.4,
por un diseño en el que no se requiera una leva (cabeza de balancín). Los mecanismos de cua-tro barras mostrados en esas dos figuras tienen objetivos similares, pero son clasificados por las
tareas diferentes que desempeñan. El diseño estándar del American Petroleum Institute (API)en la figura l.4a es un generador de función, esto es, la rotación de 3600de la manivela se con-
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 21/111
sujeción
ra una tra-o estándarfigura 1.4,de cua-
dos por las
tute (API)ela se con-
Sección 1.3 El eslabonamiento de cuatro barras
Varilla debombeo
(a) (b)
Pivote basePunto trazador
,Jde trayectoria
(e ) (d)
Figura 1.3a y 1.3b Modelo a escala de la bomba de petróleo "Minnesota". Estas figuras mues-
tran el mecanismo cerca de los límites de la porción recta del punto trazador de trayectoria.
(e) Una posición intermedia de la porción de cuatro barras producida por el software Lincages'P.
(d) Las cuatro barras junto con la cadena impulsora de dos eslabones "díada" (eslabones 5 y 6).
Observe que bay varias opciones para conectar esta diada al eslabón acoplador 4. Éstas permiten
el ajuste del alcance de la carrera, cambiando así la longitud de la porción recta de la curva aco-
pladora. © University of Minnesota,
* El icono ~ hace referencia al CD-ROM al final del libro .
5
P
§]*
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 22/111
6 Capítulo 1 Int roducci ón a la ci nemática y mecanismos
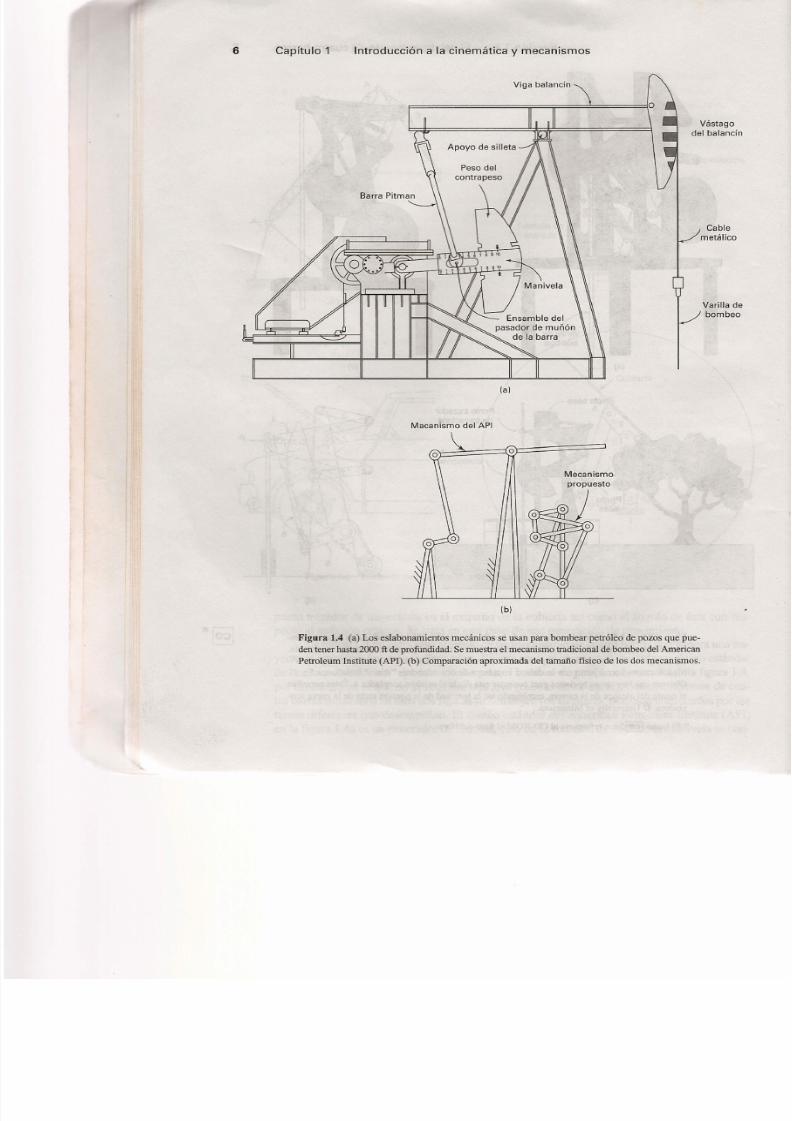
Viga balancín
(a)
Macanismo del API
o
(b)
Vástagodel balancín
Cablemetálico
Varilla debombeo
Figura 1.4 (a) Los eslabonamientos mecánicos se usan para bombear petróleo de pozos que pue-den tener hasta 2000 ft de profundidad. Se muestra el mecanismo tradicional de bombeo del American
Petroleum Institute (API). (b) Comparación aproximada del tamaño fisico de los dos mecanismos.
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 23/111
Vástagol balancín
Cablemetálico
Vari lla debombeo
Sección 1.3 El eslabonamiento de cuatro barras
vierte en la oscilación prescrita de la viga balancín. Note que tanto la manivela como la viga es-tán articuladas a tierra. En la figura 1.3, el movimiento rotatorio del eslabón de contrapeso estransferido a una traslación pura de la varilla de bombeo (el tubo que se extiende dentro del te-rreno hasta el nivel del petróleo). El mecanismo de cuatro barras que genera la línea recta (Fig.1.3c y eslabones 1 al 4 en la Fig. 1.3d) se clasifica como un generador de trayectoria. Observeque este mecanismo de cuatro barras es impulsado por otra cadena de dos eslabones (eslabones5 y 6 en la Fig. l.3d), de manera que la rotación de 36 00 del impulsor principal es convertida
en movimiento en línea recta. Este mecanismo fue diseñado para generar un segmento largo delínea recta respecto a su tamaño total. La figura l.4b muestra el tamaño de este nuevo diseñorespecto al diseño estándar del API.
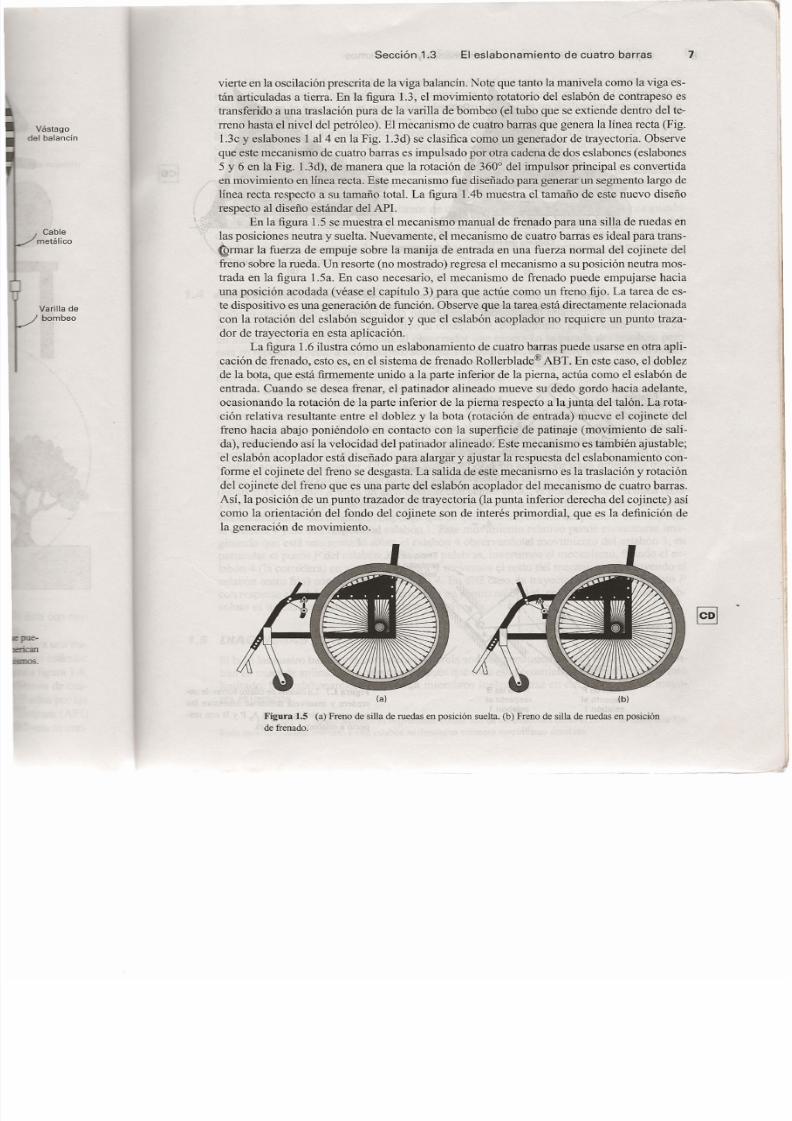
En la figura 1.5 se muestra el mecanismo manual de frenado para una silla de ruedas enlas posiciones neutra y suelta. Nuevamente, el mecanismo de cuatro barras es ideal para trans-@rmar la fuerza de empuje sobre la manija de entrada en una fuerza normal del cojinete delfreno sobre la rueda. Un resorte (no mostrado) regresa el mecanismo a su posición neutra mos-trada en la figura 1.5a. En caso necesario, el mecanismo de frenado puede empujarse haciauna posición acodada (véase el capítulo 3) para que actúe como un freno fijo. La tarea de es-te dispositivo es una generación de función. Observe que la tarea está directamente relacionadacon la rotación del eslabón seguidor y que el eslabón acoplador no requiere un punto traza-dar de trayectoria en esta aplicación.
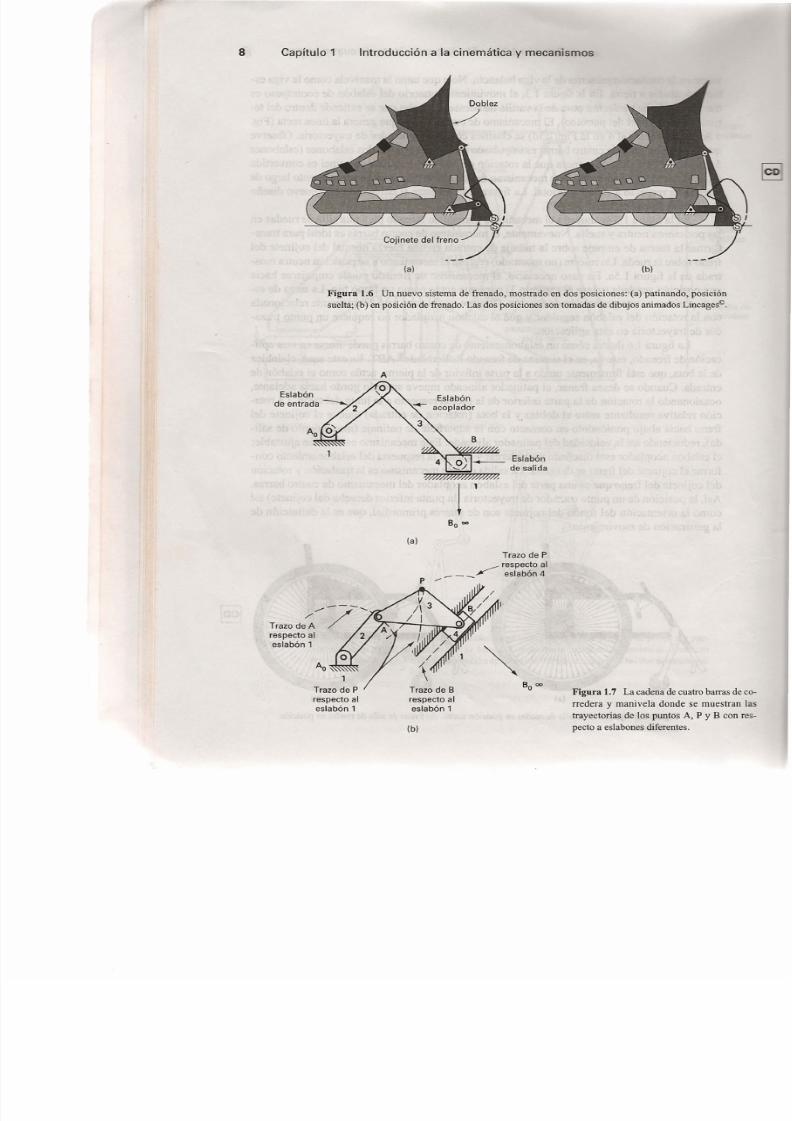
La figura 1.6 ilustra cómo un eslabonamiento de cuatro barras puede usarse en otra apli-
cación de frenado, esto es, en el sistema de frenado Rollerblade'P ABT. En este caso, el doblezde la bota, que está firmemente unido a la parte inferior de la pierna, actúa como el eslabón deentrada. Cuando se desea frenar, el patinador alineado mueve su dedo gordo hacia adelante,ocasionando la rotación de la parte inferior de la pierna respecto a la junta del talón. La rota-ción relativa resultante entre el doblez y la bota (rotación de entrada) mueve el cojinete delfreno hacia abajo poniéndolo en contacto con la superficie de patinaje (movimiento de sali-da), reduciendo así la velocidad del patinador alineado. Este mecanismo es también ajustable;el eslabón acoplador está diseñado para alargar y ajustar la respuesta del eslabonamiento con-forme el cojinete del freno se desgasta. La salida de este mecanismo es la traslación y rotacióndel cojinete del freno que es una parte del eslabón acoplador del mecanismo de cuatro barras.Así, la posición de un punto trazador de trayectoria (la punta inferior derecha del cojinete) asícomo la orientación del fondo del cojinete son de interés primordial, que es la definición dela generación de movimiento.
(a) (b)
Figura 1.5 (a) Freno de silla de ruedas en posición suelta. (b) Freno de silla de ruedas en posiciónde frenado.
7
§]
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 24/111
8 Capítulo 1 Introducción a la cinemática y mecanismos
(a)
~
(b)
Figura 1.6 Un nuevo sistema de frenado, mostrado en dos posiciones: (a) patinando, posición
suelta; (b) en posición de frenado. Las dos posiciones son tomadas de dibujos animados Lincagesf'.
A
Eslabónacoplador
B
1Bo ea
(a)
Trazo de Prespecto al
___ ~ eslabón 4/
1
Trazo de Prespecto aleslabón 1
- ,(b)
B O ea
Figura 1.7 La cadena de cuatro barras de co-
rredera y manivela donde se muestran las
trayectorias de los puntos A, P YB con res-pecto a eslabones diferentes.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 25/111
iónO .
Sección 1.5 Diagramas cinemáticos
§J
El mecanismo de cuatro barras tiene algunas configuraciones especiales cuando uno omás eslabones son de longitud infinita. El mecanismo de corredera y manivela (o manivela ydeslizador) en la figura 1.7 es una cadena de cuatro barras con un deslizador reemplazandoun eslabón de salida infinitamente largo. Nótese que el eslabón (y su pivote revoluta) de lon-gitud infinita puede ser simplemente reemplazado por un bloque deslizador y una junta decorredera. El eslabonamiento de cuatro barras y el de corredera manivela tienen ambos cua-tro eslabones y ambos son considerados cadenas de cuatro barras.
El motor de combustión interna se construye con base en el mecanismo de deslizadory manivela; la manivela es el eslabón 2, la biela es el acoplador (eslabón 3) y el pistón es eldeslizador (eslabón 4).
Existen otras formas de mecanismos de cuatro barras en los que un deslizador es guiadosobre un eslabón móvil en vez de sobre uno fijo. Esos mecanismos se llaman inversiones delde manivela y deslizador, producidos cuando otro eslabón (la manivela, el acoplador o el des-lizador) es el fijo. La sección 3.1 muestra algunas aplicaciones de inversiones del mecanismode manivela y deslizador.
1.4 ,MOVIMIENTO RELATIVO
Todo el movimiento observado en la naturaleza es movimiento relativo; es decir, el movi-miento del cuerpo observado es relativo al observador. Por ejemplo, un pasajero sentado enun autobús se mueve relativamente al observador que espera en la parada del autobús, pero
está en reposo respecto a otro pasajero sentado. Por otra parte, el pasajero que camina a lo lar-go del corredor del autobús está en movimiento relativo al pasajero sentado así como enmovimiento relativo respecto al observador en la parada.
Al estudio del movimiento o cinemática se le ha llamado la ciencia del movimiento re-lativo. El diseño y análisis de maquinaria y mecanismos depende de la habilidad del proyectistaen visualizar el movimiento relativo de los componentes de la maquinaria. Un objetivo prin-cipal de este capítulo es familiarizar al lector con el movimiento generado por una variedad demecanismos eslabonados y prepararlo así para temas de análisis y síntesis basados en este co-nocimiento básico. La figura. 1.7b muestra un eslabonamiento de corredera y manivela con uneslabón acoplador triangular ABP. Cada punto del eslabón acoplador traza diferentes trayec-torias, llamadas curvas acopladoras (refiérase nuevamente a la Fig. 1.1b) con respecto a tierra(eslabón 1). El punto A traza un arco circular con centro en A o' el punto B viaja en línea rectay el punto P traza una curva más compleja. Todas esas curvas acopladoras son parte del movi-miento absoluto* del eslabón 3. Suponga que se quiere la trayectoria del punto P con respecto
al eslabón 4 y no con respecto al eslabón l. Este movimiento relativo puede encontrarse ima-ginando que está uno sentado sobre el eslabón 4 observando el movimiento del eslabón 3, enparticular el punto P del eslabón 3. En otras palabras, invertimos el mecanismo, fijando el es-labón 4 (la corredera) en vez del eslabón 1 y movemos el resto del mecanismo (incluyendo eleslabón antes fijo) con respecto al eslabón 4. En este caso, la trayectoria relativa del punto P
con respecto al eslabón 4 es un arco circular con centro en B. Así, entonces, el movimiento ab-soluto es un caso especial de movimiento relativo.
1.5 DIAGRAMAS CINEMÁ TICOS
Si bien las cuatro barras y la corredera-manivela son eslabonamientos muy útiles y se encuen-tran en miles de aplicaciones, veremos después que esos eslabonarnientos tienen un rendimientolimitado. Los eslabonamiento s con más miembros suelen usarse en circunstancias de mayo-res exigencias.
* En el análisis de mecanismos es conveniente definir uno de los eslabones como el marco de referencia fijo.
Todo movimiento con respecto a este eslabón se denomina entonces movimiento absoluto.
9
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 26/111
10 Capítulo 1 Introducción a la cinemática y mecanismos
Marco
dela
ventana
Ranura
Rodillo
Brazo operador
Calza
Antepecho
(a)
Calza
(Corredera)
(6)
Disco en la ranura (Corredera)
Antepecho
Engranaje de tornillo sin fin
lb)
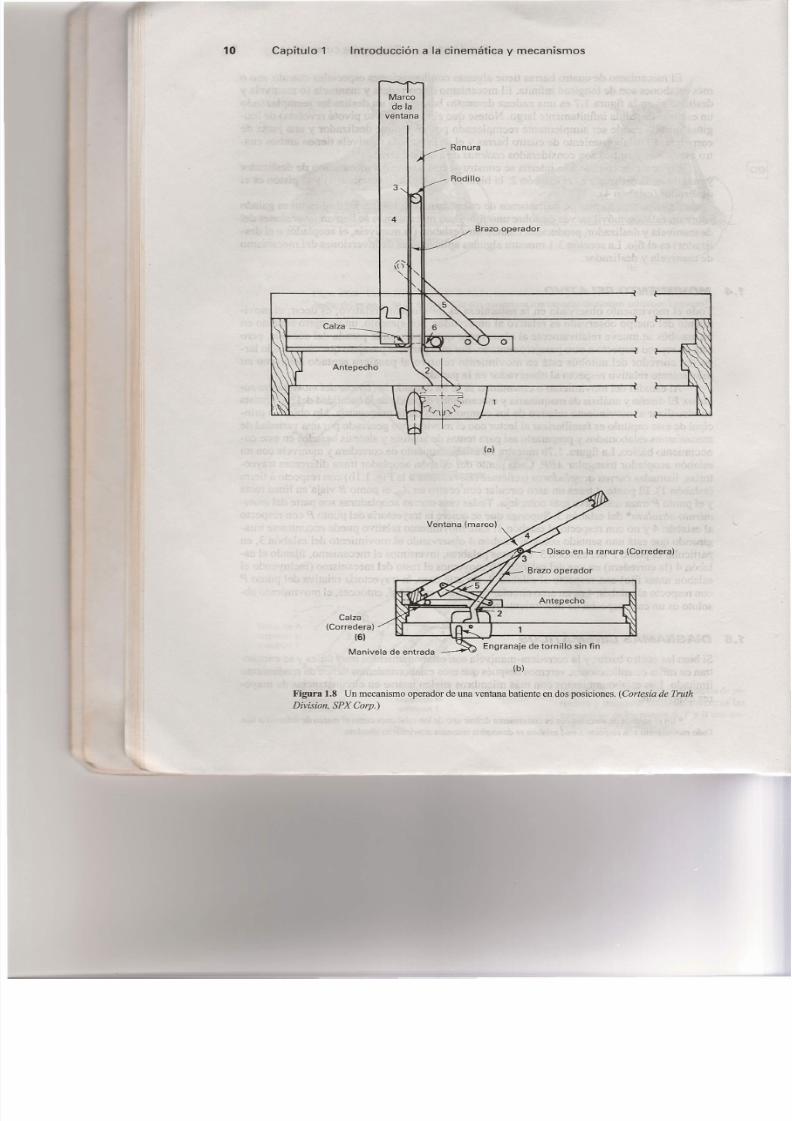
Figura 1.8 U n m ec ani smo o perado r de una vent ana bat ie nte en do s po sici o nes . (C orte sia de Truth
Div ision, SP X Co rp .)
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 27/111
Sección 1.5 Diagramas cinemáticos 11
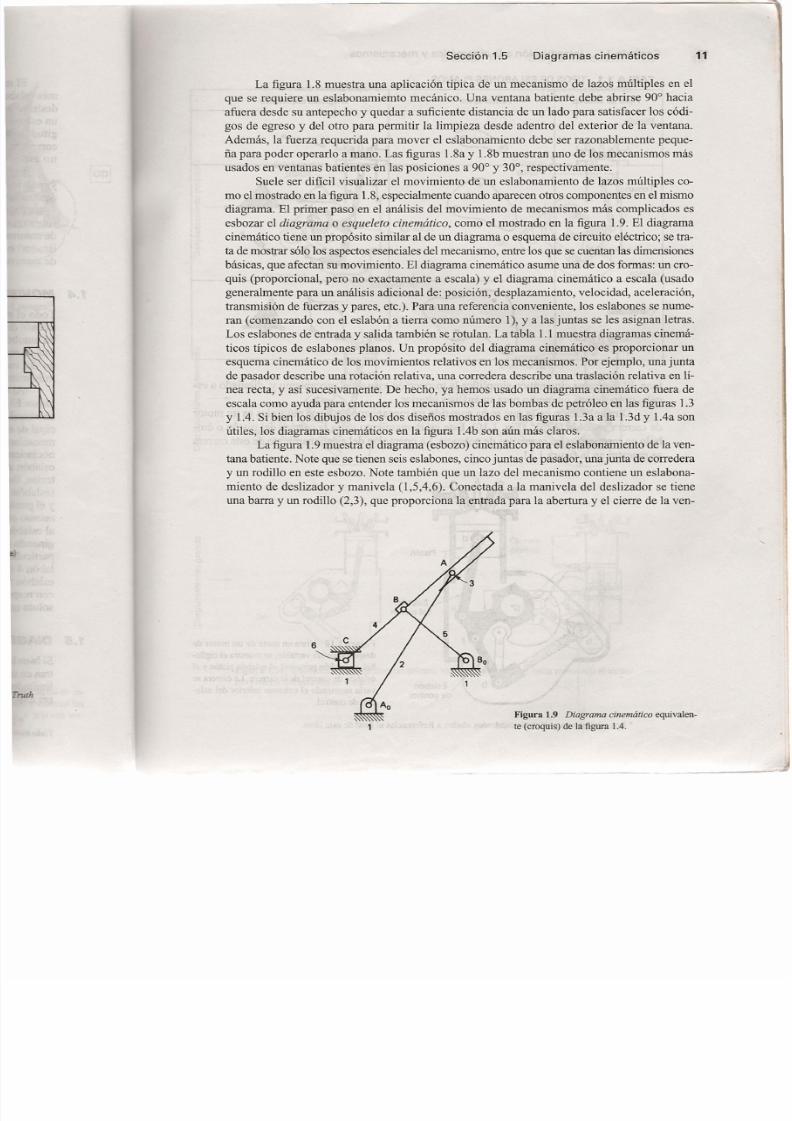
La figura 1.8 muestra una aplicación típica de un mecanismo de lazos múltiples en elque se requiere un eslabonamiemto mecánico. Una ventana batiente debe abrirse 90° haciaafuera desde su antepecho y quedar a suficiente distancia de un lado para satisfacer los códi-gos de egreso y del otro para permitir la limpieza desde adentro del exterior de la ventana.
Además, la fuerza requerida para mover el eslabonamiento debe ser razonablemente peque-ña para poder operarlo a mano. Las figuras 1.8a y 1.8b muestran uno de los mecanismos másusados en ventanas batientes en las posiciones a 90° y 30°, respectivamente.
Suele ser dificil visual izar el movimiento de un eslabonamiento de lazos múltiples co-mo el mostrado en la figura 1.8, especialmente cuando aparecen otros componentes en el mismodiagrama. El primer paso en el análisis del movimiento de mecanismos más complicados es
esbozar el diagrama o esqueleto cinemática, como el mostrado en la figura 1.9. El diagramacinemático tiene un propósito similar al de un diagrama o esquema de circuito eléctrico; se tra-ta de mostrar sólo los aspectos esenciales del mecanismo, entre los que se cuentan las dimensiones
básicas, que afectan su movimiento. El diagrama cinemático asume una de dos formas: un cro-quis (proporcional, pero no exactamente a escala) y el diagrama cinemático a escala (usadogeneralmente para un análisis adicional de: posición, desplazamiento, velocidad, aceleración,transmisión de fuerzas y pares, etc.). Para una referencia conveniente, los eslabones se nume-ran (comenzando con el eslabón a tierra como número 1), y a las juntas se les asignan letras.Los eslabones de entrada y salida también se rotulan. La tabla 1.1 muestra diagrarnas cinemá-ticos típicos de eslabones planos. Un propósito del diagrama cinemático es proporcionar un
esquema cinemático de los movimientos relativos en los mecanismos. Por ejemplo, unajuntade pasador describe una rotación relativa, una corredera describe una traslación relativa en lí-nea recta, y así sucesivamente. De hecho, ya hemos usado un diagrama cinemático fuera deescala como ayuda para entender los mecanismos de las bombas de petróleo en las figuras 1.3y lA. Si bien los dibujos de los dos diseños mostrados en las figuras 1.3a a la 1.3d y 1.4a sonútiles, los diagrarnas cinemáticos en la figura 1.4b son aún más claros.
La figura 1.9 muestra el diagrama (esbozo) cinemático para el eslabonamiento de la ven-tana batiente. Note que se tienen seis eslabones, cinco juntas de pasador, una junta de correderay un rodillo en este esbozo. Note también que un lazo del mecanismo contiene un eslabona-miento de deslizador y manivela (1,5,4,6). Conectada a la manivela del deslizador se tieneuna barra y un rodillo (2,3), que proporciona la entrada para la abertura y el cierre de la ven-
6
Figura 1.9 Diagrama cinemático equivalen-te (croquis) de la figura 1.4.
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 28/111
12 Capítulo 1
TABLA 1.1 TIPOS DE ESLABONES PLANOS
Introducción a la cinemática y mecanismos
Tipos de eslabón Forma típica Diagrama esquelético
Binario
?3 ~
Temario
D
Cuaternario
e:--L./
~
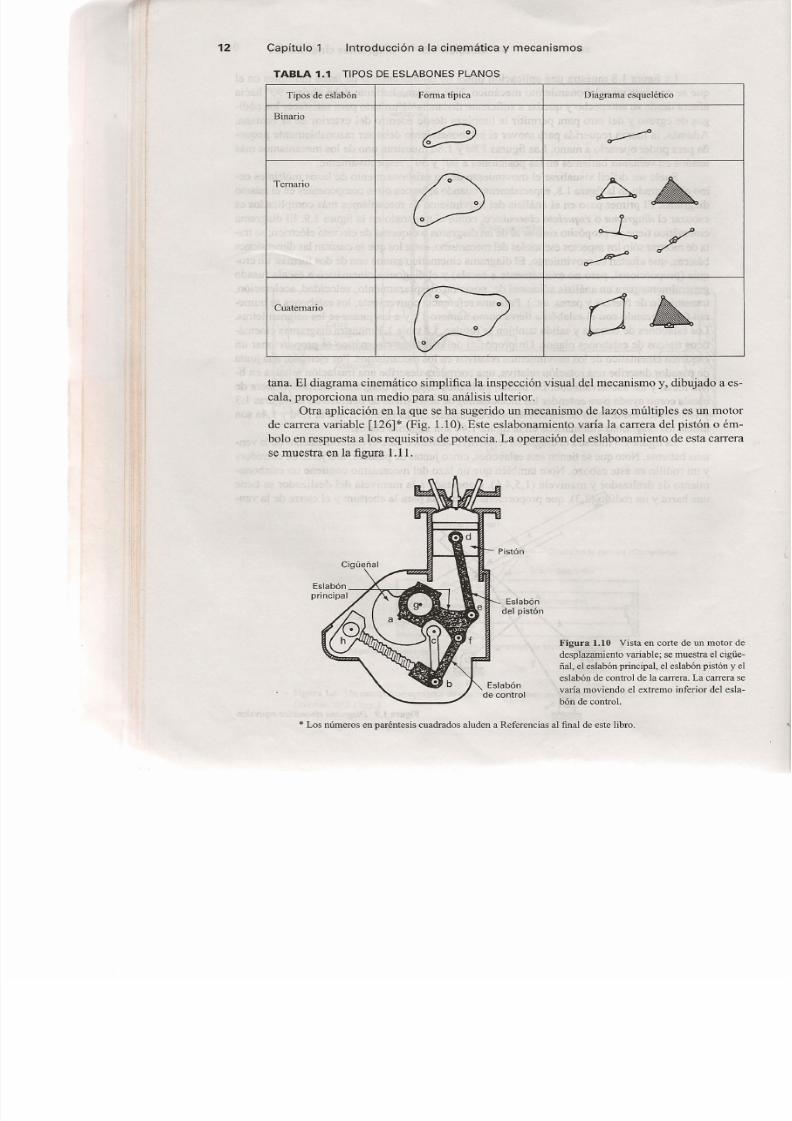
atana. El diagrama cinemático simplifica la inspección visual del mecanismo y, dibujado a es-cala, proporciona un medio para su análisis ulterior.
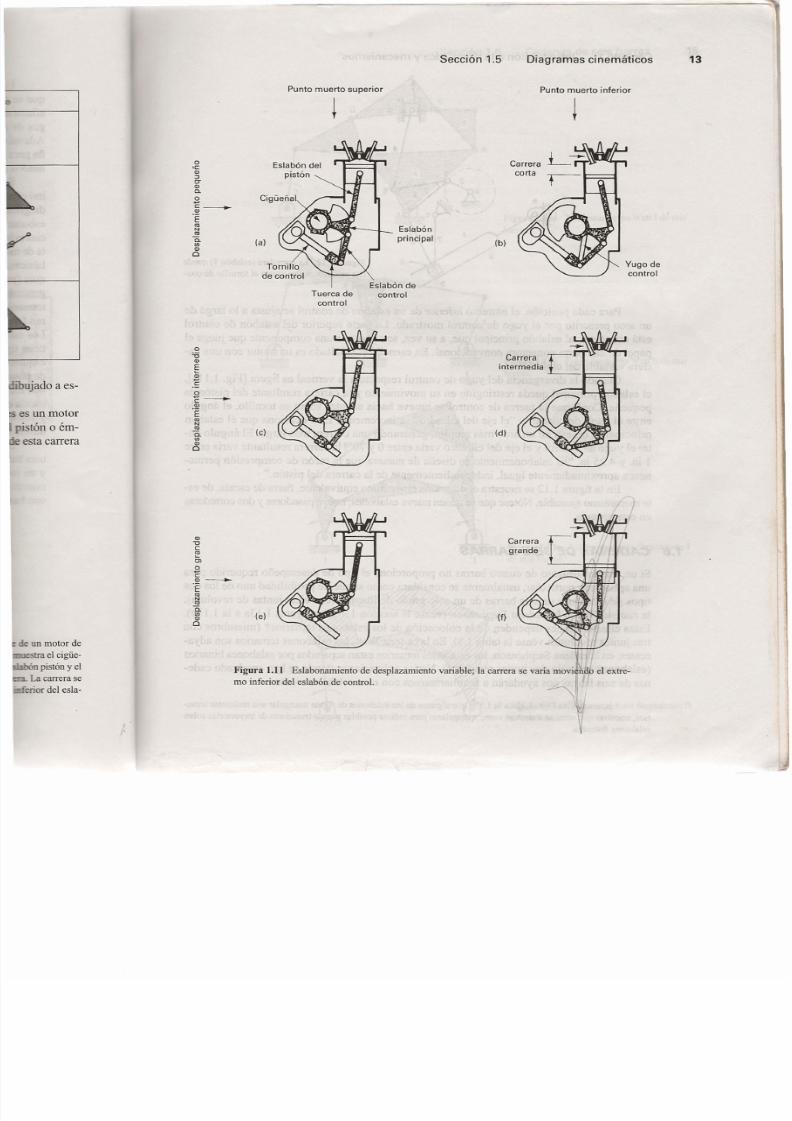
Otra aplicación en la que se ha sugerido un mecanismo de lazos múltiples es un motorde carrera variable [126]* (Fig. 1.10). Este eslabonamiento varía la carrera del pistón o ém-bolo en respuesta a los requisitos de potencia. La operación del eslabonamiento de esta carrerase muestra en la figura 1.11.
Eslabóndel pistón
Figura 1.10 Vista en corte de un motor de
desplazamiento variable; se muestra el cigüe-
ñal, el eslabón principal, el eslabón pistón y el
eslabón de control de la carrera. La carrera se
varía moviendo el ext remo inferior del esla-
bón de control.
* Los números en paréntesis cuadrados aluden a Referencias al final de este libro.
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 29/111
oleQ)
:JCTQ)C.
O
c _
Q)
·E
' "N'".
' "DO
.9
"OQ)
EID
.~Bc-O l
· E
' "N.sC.enOl
O
Q)
"O
e
~el
BeQ-
·E
'"N'" .e nOl
O
n motor de
a el cigüe-
pistón y el
carrera se
r del esla-
Sección 1.5 Diagramas cinemáticos 13
Punto muerto superior Punto muerto inferior
¡ ¡
Eslabón
principal(b)
Eslabón del
pistón
Carrera
corta
(a)
Yugo de
control
Tuerca de
control
Eslabón de
control
(e) (d)
(e) (f)
Carrera
grande
fFigura 1.11 Eslabonamiento de desplazamiento variable; la carrera se varia movieh.clP el extre-
mo inferior del eslabón de control. ~ I
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 30/111
14 Capítulo 1 cción a la cinemática y mecanismos
5
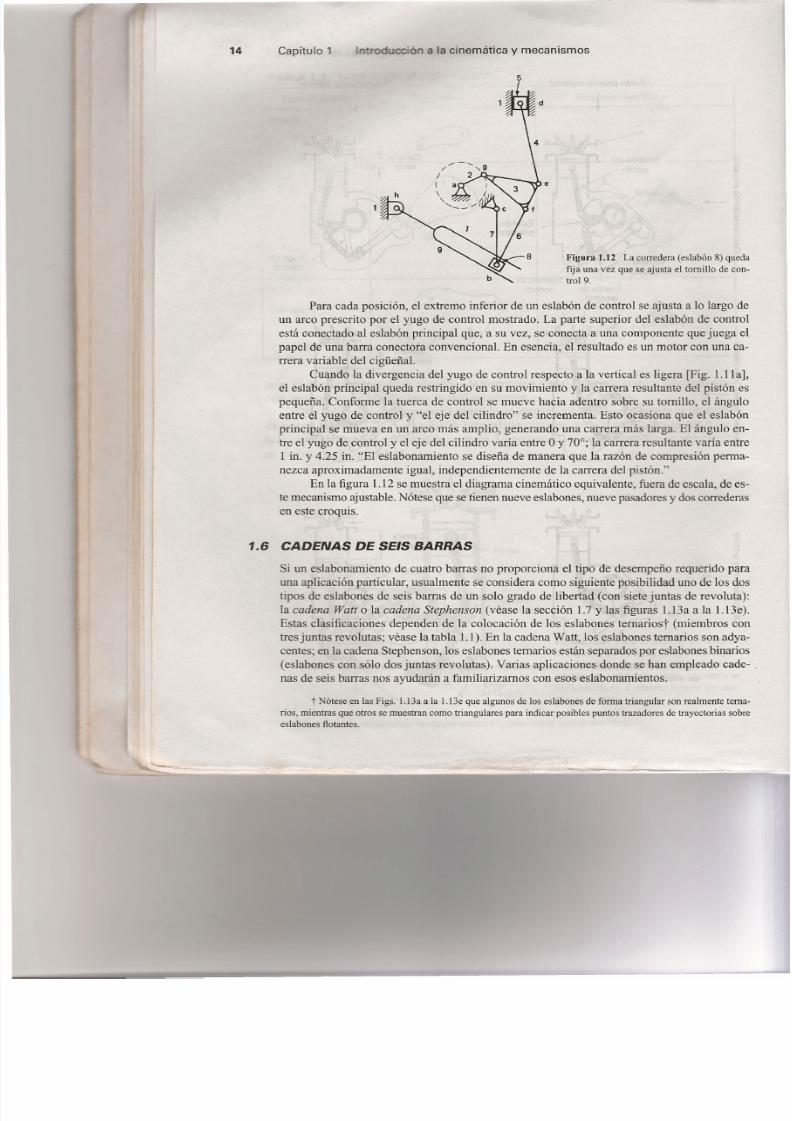
Figura 1.12 La corredera (eslabón 8) queda
fija una vez que se ajusta el tornillo de con-
trol9.
e
Para cada posición, el extremo inferior de un eslabón de control se ajusta a 1 0 largo deun arco prescrito por el yugo de control mostrado. La parte superior del eslabón de controlestá conectado al eslabón principal que, a su vez, se conecta a una componente que juega elpapel de una barra conectora convencional. En esencia, el resultado es un motor con una ca-
rrera variable del cigüeñal.Cuando la divergencia del yugo de control respecto a la vertical es ligera [Fig. 1.11a],
el eslabón principal queda restringido en su movimiento y la carrera resultante del pistón espequeña. Conforme la tuerca de control se mueve hacia adentro sobre su tornillo, el ánguloentre el yugo de control y "el eje del cilindro" se incrementa. Esto ocasiona que el eslabónprincipal se mueva en un arco más amplio, generando una carrera más larga. El ángulo en-tre el yugo de control y el eje del cilindro varía entre Oy 70°; la carrera resultante varía entre1 in. Y4.25 in. "El eslabonamiento se diseña de manera que la razón de compresión perma-nezca aproximadamente igual, independientemente de la carrera del pistón."
En la figura 1.12 se muestra el diagrama cinemático equivalente, fuera de escala, de es-te mecanismo ajustable. Nótese que se tienen nueve eslabones, nueve pasadores y dos correderasen este croquis.
1.6 CADENAS DE SEIS BARRAS
Si un eslabonamiento de cuatro barras no proporciona el tipo de desempeño requerido parauna aplicación particular, usualmente se considera como siguiente posibilidad uno de los dostipos de eslabones de seis barras de un solo grado de libertad (con siete juntas de revoluta):la cadena Watt o la cadena Stephenson (véase la sección 1.7 y las figuras 1.13a a la 1.l3e).Estas clasificaciones dependen de la colocación de los eslabones ternarios] (miembros contres juntas revolutas; véase la tabla 1.1). En la cadena Watt, los eslabones temarios son adya-centes; en la cadena Stephenson, los eslabones temarios están separados por eslabones binarios(eslabones con sólo dos juntas revolutas). Varias aplicaciones donde se han empleado cade- ,nas de seis barras nos ayudarán a familiarizamos con esos eslabonarnientos.
t Nótese en las Figs. 1.13a a la l.13e que algunos de los eslabones de forma triangular son realmente tema-
ríos, mientras que otros se muestran como triangulares para indicar posibles puntos trazadores de trayectorias sobreeslabones flotantes.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 31/111
ón 8) queda
llo de con-
largo dede controle juega eln una ca-
. 1.11 a],
pistón esel ángulo
el eslabónngulo en-aria entren perma-
la, de es-correderas
rido parade los dosrevoluta):la l.13e).bros conson adya-s binariosdo cade-
Sección 1.6 Cadenas de seis barras
R
Figura l.13a Eslabonamiento Watt 1 de seis
barras.
Figura l.13b Eslabonamiento Watt TIde seis
barras .
Figura l.13c Eslabonamiento Stephenson I
de seis barras.
Figura 1.13d Eslabonamiento Stephenson IIde seis barras.
15

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 32/111
16 Capítulo 1 Introducción a la cinemática y mecanismos
Figura l.13e EslabonamientoStephensonIIIde seis barras.
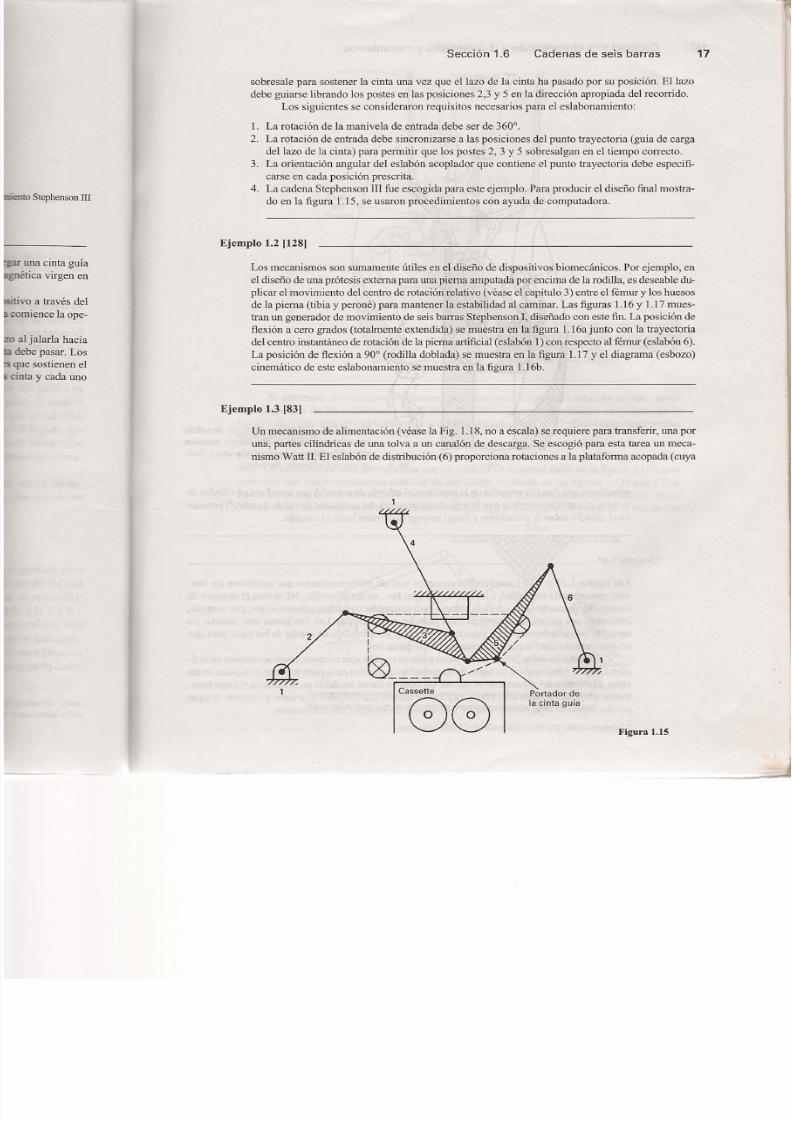
Ejemplo 1.1 [48]
En la fabricación de cartuchos de cinta para cassettes, es necesario a veces cargar una cinta guiacontenida en el cassette ensamblado sobre un dispositivo que enrolla cinta magnética virgen enel cassette. Se busca un eslabonamiento mecánico para cargar la cinta guía.
La figura 1.14 muestra la posición del cassette, la cinta guía y el disposit ivo a través delcual la cinta debe cargarse en el tiempo que se desea que el eslabonamiento guia comience la ope-ración. La línea de rayas es la configuración final de la cinta guía cargada.
La cinta se desenrolla desde ambos lados del cassette formando un lazo al jalarla hacia
afuera. Los números 1 al 5 indican las posiciones sucesivas por las que la cinta debe pasar. Loscírculos marcados con una cruz en las posiciones 2, 3 y 5 (Fig. 1 '14) son postes que sostienen ellazo de la cinta. Esos postes están inicialmente por debajo de la cubierta de la cinta y cada uno
F3-----I---~ --/'I /I /I /I ¡
I //I /
I Lazo de la I ¡/
I cinta gu~.a ¡/I ¡I /K/\ 2 ¡'<::t.______ 1 /
Figura 1.14
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 33/111
Sección 1.6 Cadenas de seis barras
rn
sobresale para sostener la cinta una vez que el lazo de la cinta ha pasado por su posición. El lazodebe guiarse librando los postes en las posiciones 2,3 y 5 en la dirección apropiada del recorrido.
Los siguientes se consideraron requisitos necesarios para el eslabonamiento:
1. La rotación de la manivela de entrada debe ser de 360°.2. La rotación de entrada debe sincronizarse a las posiciones del punto trayectoria (guía de cargadel lazo de la cinta) para permitir que los postes 2, 3 Y 5 sobresalgan en el tiempo correcto.
3. La orientación angular del eslabón acoplador que contiene el punto trayectoria debe especifi-
carse en cada posición prescrita.4. La cadena Stephenson III fue escogida para este ejemplo. Para producir el diseño final mostra-do en la figura 1.15, se usaron procedimientos con ayuda de computadora.
Ejemplo 1.2 [128]
cinta guíavirgen en
Los mecanismos son sumamente útiles en el diseño de dispositivos biomecánicos. Por ejemplo, enel diseño de una prótesis externa para una pierna amputada por encima de la rodilla, es deseable du-plicar el movimiento del centro de rotación relativo (véase el capítulo 3) entre el fémur y los huesosde la pierna (tibia y peroné) para mantener la estabilidad al caminar. Las figuras 1.16 y 1.17 mues-tran un generador de movimiento de seis barras Stephenson 1, diseñado con este fin. La posición def1exión a cero grados (totalmente extendida) se muestra en la figura 1.16a junto con la trayectoriadel centro instantáneo de rotación de la pierna artificial (eslabón 1) con respecto al fémur (eslabón 6).
La posición de f1exión a 90° (rodilla doblada) se muestra en la figura 1.17 y el diagrama (esbozo)cinemático de este eslabonamiento se muestra en la figura 1.16b.
través delce la ope-
arla hacia
pasar. Losnen ely cada uno
Ejemplo 1.3 [83]
Un mecanismo de alimentación (véase la Fig. 1.18, no a escala) se requiere para transferir, una por
una, partes cilindricas de una tolva aun canalón de descarga. Se escogió para esta tarea un meca-nismo Watt n. El eslabón de distribución (6) proporciona rotaciones a la plataforma acopada (cuya
I
II
( g } - = = - =C a s s e t t e P o r t a d o r d e
la cinta guía
88 Figura 1.15
17

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 34/111
8 Capítulo 1 Introducción a la cinemática y mecanismos
o· Flexión de
la rodilla
Figura 1.16 Mecanismo protésico de rodilla
con eslabonamiento~rras; posición
extendida. (Biomechanics Laboratory, Uni-
versity of California, Berke/ey.)a) lb)
rotación es una función prescrita de la rotación del eslabón de entrada) que transfiere un cilindro dela tolva al canalón, mientras que la trayectoria prescrita del acoplador de salida (punto P) posicio-
na el cilindro sobre la plataforma y luego empuja el cilindro hacia el canalón.
Ejemplo 1.4*
Las figuras 1.19 y 1.20 muestran dos ejemplos más de eslabonamientos que satisfacen los mis-mos requisitos de tarea dual. Las TAH lndustries Inc., de Robbinsville, NJ, tenían el objetivo de
desarrollar un mecanismo operado a mano para ensamblar cartuchos adhesivo s que, por ejemplo,contienen una epoxia de dos partes (una parte en cada cámara). Las dos tareas son: insertar lastapas de los cartuchos en éstos usando un émbolo y girar la placa de sostén de las tapas para queno interf iera durante la carga y descarga de los cartuchos.
El cartucho doble rellenado se coloca primero en el bloque receptor, como se muestra en la fi-gura 1.19a. A continuación, las tapas de los cartuchos se insertan en la parte superior de la placa de lastapas. El objetivo del mecanismo es insertar las tapas en forma confiable en el cartucho y luego retro-
traerse a la posición mostrada en la figura 1.19a de manera que el siguiente cartucho y conjunto de tapas
puedan colocarse en el bloque receptor y en la placa de las tapas, respectivamente.
* Proporcionado por Peter Gruendeman, TAH lndustries.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 35/111
Sección 1.6 Cadenas de seis barras 19
Figura 1.17 Mecanismo protésico de rodilla
con eslabonamiento de seis barras; posición
fiexionada. (Biomechanics Laboratory, Uni-
versity ofCalifornia, Berkeley.)
Ajustepor
fricción
Se presentan dos soluciones diferentes para esta tarea. La primera solución usa una corre-dera como uno de los eslabones (Figs. 1.19a a la 1.19c). La segunda solución se muestra en la
figura 1.20. ¿Qué tipo de mecanismos de seis barras se han usado aquí? ¿Qué tareas desempeñan
esos mecanismos?o de rodilla
; posiciónory, Uni- Respuesta La figura 1.19c muestra un diagrama cinemático fuera de escala de la primera solu-
ción. La corredera ha sido reemplazada por un eslabón de longitud finita en la figura 1.19d paracomparar éste con el mecanismo estándar de seis barras mostrado en las figuras 1.13a a la l.13e.
Puede verse que éste es un mecanismo Watt T I de seis barras y generador de doble función. El es-
labón 4 es la entrada, mientras que el émbolo (eslabón 2) y la placa de tapas (eslabón 6) son las dos
Tol,va
los mis-etivo deejemplo,tar las
para que ' 1analónde descargan la fi-
aca de lasego retro-
de tapas
Figura 1.18
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 36/111
20 Capítulo 1
2áquina cargadora de tapas
Introducción a la cinemática y mecanismos
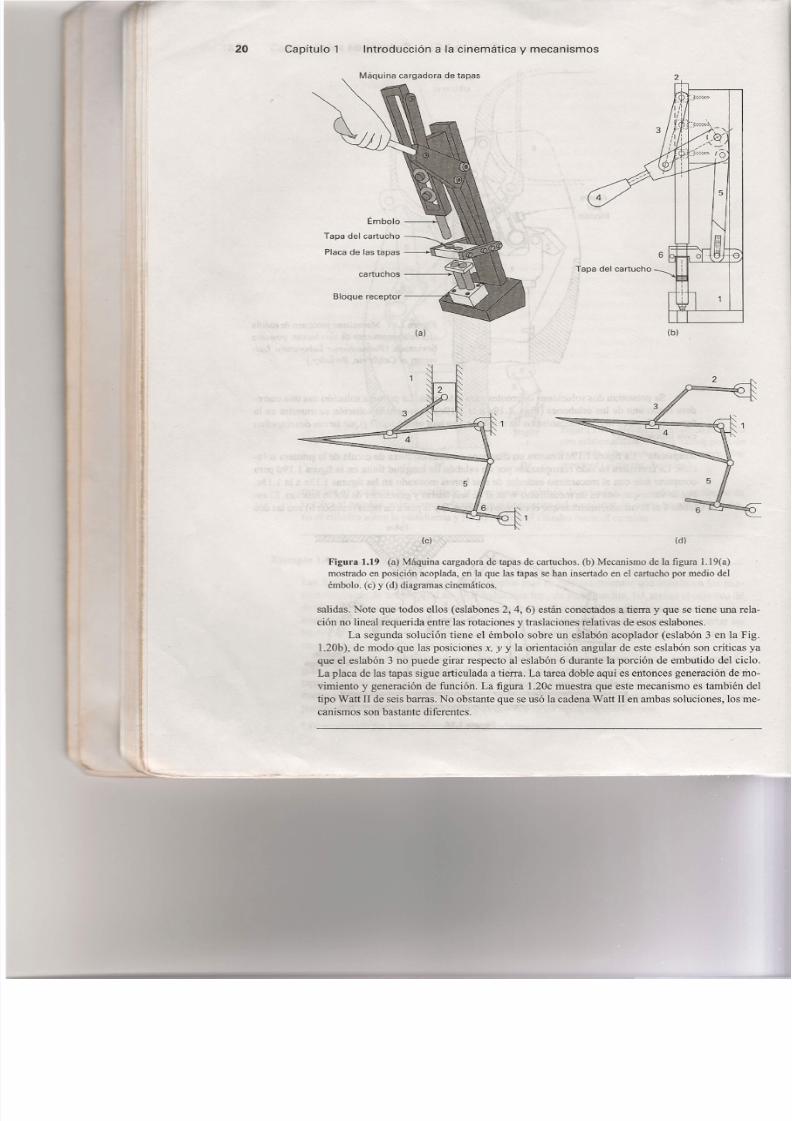
Figura 1.19 (a) Máquina cargadora de tapas de cartuchos. (b) Mecanismo de la figura 1.19(a)
mostrado en posición acoplada, en la que las tapas se han insertado en el cartucho por medio del
émbolo. (e) y (d) diagramas cinemáticos.
salidas. Note que todos ellos (eslabones 2, 4, 6) están conectados a tierra y que se tiene una rela-
ción no lineal requerida entre las rotaciones y traslaciones relativas de esos eslabones.La segunda solución tiene el émbolo sobre un eslabón acoplador (eslabón 3 en la Fig.
1.20b), de modo que las posiciones x, y y la orientación angular de este eslabón son críticas yaque el eslabón 3 no puede girar respecto al eslabón 6 durante la porción de embutido del ciclo.La placa de las tapas sigue articulada a tierra. La tarea doble aquí es entonces generación de mo-
vimiento y generación de función. La figura 1.20c muestra que este mecanismo es también del
tipo Watt r r de seis barras. No obstante que se usó la cadena Watt II en ambas soluciones, los me-
canismos son bastante diferentes.
Tapa del cartucho
Placa de las tapas
cartuchos ~\IIl
Bloque receptor ~
(el
4
(al
5
f fi I
6~®HeTapa del cartucho
(bl
(dl
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 37/111
5
Sección 1.7 Grados de libertad
5
2: o :
5
: 0 : 6
3
ne una rela-
3 en la Fig.críticas yao del ciclo.ión de mo-
también del, los me-
2OJI0 6
: 0:
3
(a)
(b)
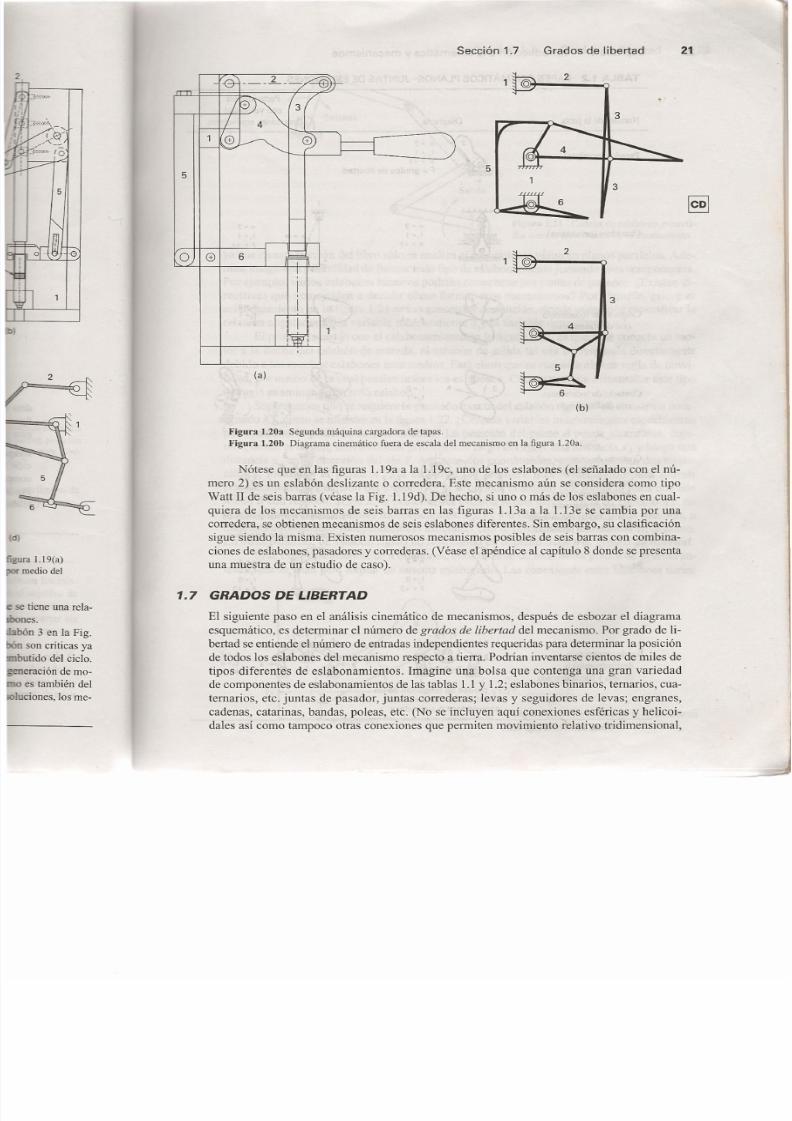
Figura 1.20a Segunda máquina cargadora de tapas.Figura 1.20b Diagrama cinemático fuera de escala del mecanismo en la figura l.20a.
Nótese que en las figuras 1.19a a la 1.19c, uno de los eslabones (el señalado con el nú-mero 2) es un eslabón deslizante o corredera. Este mecanismo aún se considera como tipoWatt II de seis barras (véase la Fig. 1.l9d). De hecho, si uno o más de los eslabones en cual-quiera de los mecanismos de seis barras en las figuras 1.13a a la 1.Be se cambia por unacorredera, se obtienen mecanismos de seis eslabones diferentes. Sin embargo, su clasificación
sigue siendo la misma. Existen numerosos mecanismos posibles de seis barras con combina-ciones de eslabones, pasadores y correderas. (Véase el apéndice al capítulo 8 donde se presentauna muestra de un estudio de caso).
1.7 GRADOS DE LIBERTAD
El siguiente paso en el análisis cinemático de mecanismos, después de esbozar el diagramaesquemático, es determinar el número de grados de libertad del mecanismo. Por grado de li-bertad se entiende el número de entradas independientes requeridas para determinar la posiciónde todos los eslabones del mecanismo respecto a tierra. Podrían inventarse cientos de miles detipos diferentes de eslabonamientos. Imagine una bolsa que contenga una gran variedadde componentes de eslabonarnientos de las tablas 1.1 y 1.2; eslabones binarios, temarios, cua-ternarios, etc. juntas de pasador, juntas correderas; levas y seguidores de levas; engranes,
cadenas, catarinas, bandas, poleas, etc. (No se incluyen aquí conexiones esféricas y helicoi-dales así como tampoco otras conexiones que permiten movimiento relativo tridimensional,
21
§]
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 38/111
Capítulo 1 Introducción a la cinemática y mecanismos2
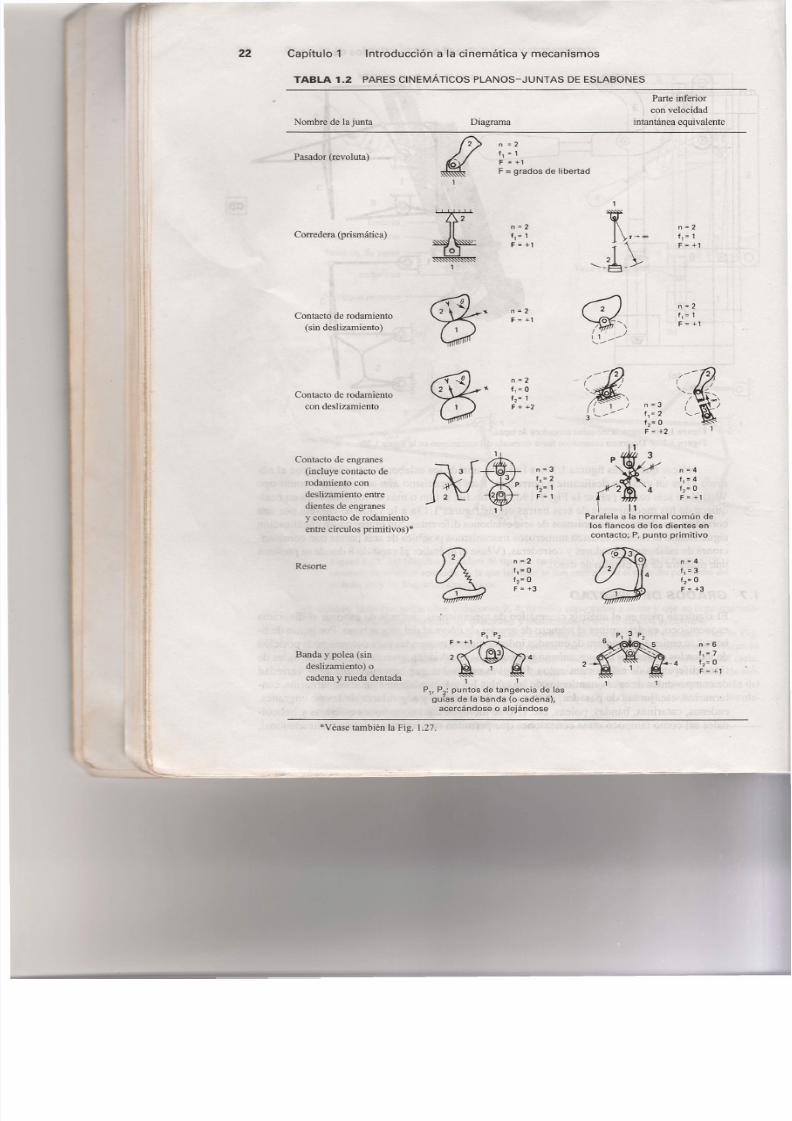
TABLA 1.2 PARES CINEMÁTICOS PLANOS-JUNTAS DE ESLABONES
Parte inferior
con velocidad
intantánea equivalenteombre de lajunta Diagrama
Pasador (revoluta) ¡¡ = 21, = 1
F = +1
F = grados de libertad
J: n = 2
~r--n=2
Corredera (prismática) 1,= 1 1, = 1
F = +1
,--i\F = +1
~'~~',,~"$
~
c ¡ ; n=2
Contacto de rodamiento2 .• n = 2
1,= 1F = +1
(sin deslizamiento) 1/ \ F = +1
I J11 --_/
~~
/ - ¡ ¿= 2 -,,- }
( / I /
Contacto de rodamiento2 .• 1,= O
\~ , 1 )
\ /
1,= 1 ' ; ; ~~\
con deslizamiento , F = +2 n=3
I~I _/
1,' 2,-- ,--1,= O
1F = +2
$ontacto de engranes
Ntp 3
(incluye contacto de n=3
(n~.
n=4
rodamiento con 1,= 2 1, = 4
deslizamiento entre1,= 1 1,= O
F = , F = +'dientes de engranes \ 1 1y contacto de rodamiento Paralela a la normal común de
entre círculos primitivos)* los flancos de los dientes en
contacto; P, punto primitivo
~ ~
Resorten=2 ,- o
n=41,= O
2 -4
1, = 31,= O 1,= O
F = +31 . ' F = +3
M-P,3;'5
/ "0" O"~
"', ... 42 - 1
x 1 ' 1
F f f l ' l P'P
2
2 03 4
- , -"1 "
Pl' P2 : puntos de tangencia de lasguías de la banda (o cadena).acercándose o alejándose
n=61, = 71,= OF = +1
Banda y polea (sin
deslizamiento) o
cadena y rueda dentada
'Véase también la Fig, 1.27,
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 39/111
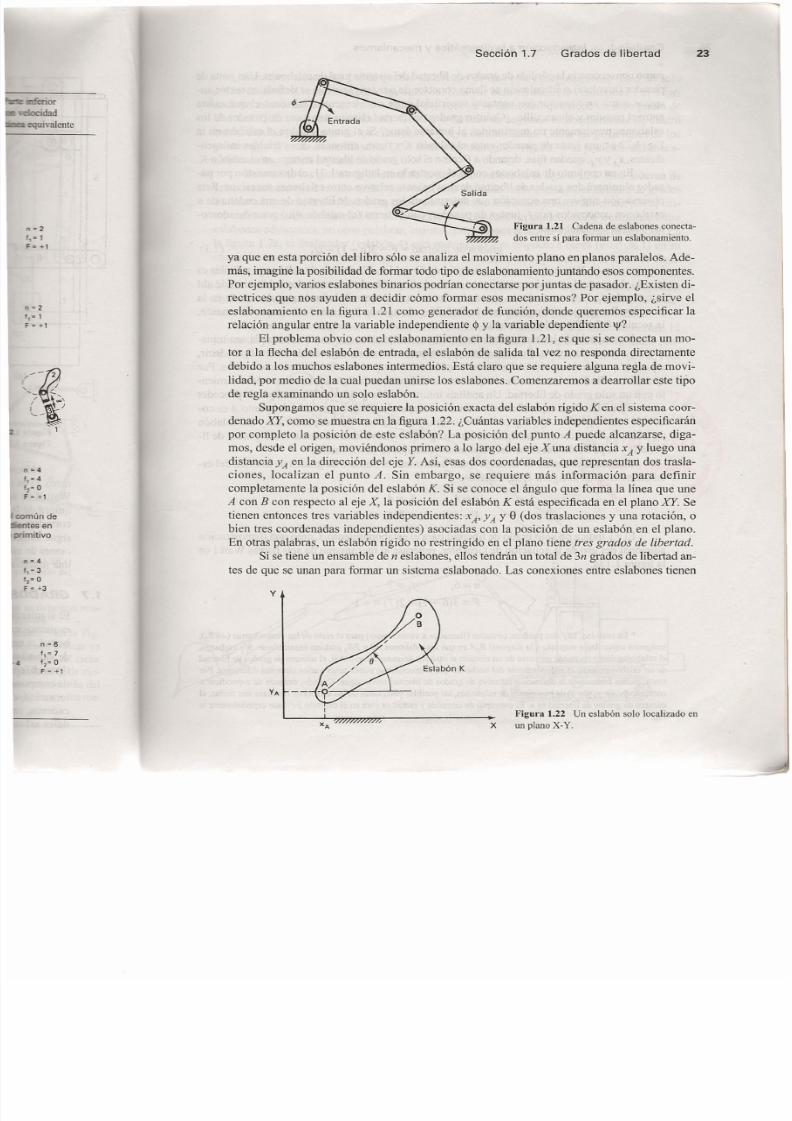
Sección 1.7 Grados de libertad
Figura 1.21 Cadena de eslabones conecta-
dos entre sí para formar un eslabonamiento.2
1
+1
2
1
+1
ya que en esta porción del libro sólo se analiza el movimiento plano en planos paralelos. Ade-más, imagine la posibilidad de formar todo tipo de eslabonamiento juntando esos componentes.Por ejemplo, varios eslabones binarios podrían conectarse por juntas de pasador. ¿Existen di-rectrices que nos ayuden a decidir cómo formar esos mecanismos? Por ejemplo, ¿sirve eleslabonamiento en la figura 1.21 como generador de función, donde queremos especificar larelación angular entre la variable independiente < 1 > y la variable dependiente ",?
El problema obvio con el eslabonamiento en la figura 1.21, es que si se conecta un mo-
tor a la flecha del eslabón de entrada, el eslabón de salida tal vez no responda directamentedebido a los muchos eslabones intermedios. Está claro que se requiere alguna regla de movi-lidad, por medio de la cual puedan unirse los eslabones. Comenzaremos a dearrollar este tipode regla examinando un solo eslabón.
Supongamos que se requiere la posición exacta del eslabón rígido K en el sistema coor-denado XY, como se muestra en la figura 1.22. ¿Cuántas variables independientes especificaránpor completo la posición de este eslabón? La posición del punto A puede alcanzarse, diga-mos, desde el origen, moviéndonos primero a lo largo del eje X una distancia xA y luego unadistancia YA en la dirección del eje Y. Así, esas dos coordenadas, que representan dos trasla-ciones, localizan el punto A. Sin embargo, se requiere más información para definircompletamente la posición del eslabón K. Si se conoce el ángulo que forma la línea que uneA con B con respecto al eje X, la posición del eslabón K está especificada en el plano XY. Setienen entonces tres variables independientes: xA, YA y e (dos traslaciones y una rotación, obien tres coordenadas independientes) asociadas con la posición de un eslabón en el plano.En otras palabras, un eslabón rígido no restringido en el plano tiene tres grados de libertad.
Si se tiene un ensamble de n eslabones, ellos tendrán un total de 3n grados de libertad an-tes de que se unan para formar un sistema eslabonado. Las conexiones entre eslabones tienen
; ) 2/¡-; ; ,
~-t1
4
o+1
deen
ivo
3o
+3y
Figura 1.22 Un eslabón solo localizado enX un plano X-Y.
n=6
1, = 7f2= O
F = +1
YA ~--
XA
23
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 40/111
Capítulo 1 Introducción a la cinemática y mecanismos4
como consecuencia la pérdida de grados de libertad del sistema total de eslabones. Una junta depasador (revoluta) o articulación se llama conector de par inferior; éste se definía en textos an-tiguos como un conectar con contacto superficial entre sus elementos, tal como el que existe
entre el pasador y el casquillo. ¿Cuántos grados de libertad elimina una junta de pasador de loseslabones previamente no restringidos al juntarse éstos? Si el punto A sobre el eslabón en laFig. 1.22 es una junta de pasador entre el eslabón K y tierra, entonces, dos variables indepen-dientes, xA y YA' quedan fijas, dejando a e como el solo grado de libertad restante en el eslabón K.
En un conjunto de eslabones como el mostrado en la figura 1.21, cada conexión por pa-sador eliminará dos grados de libertad de movimiento relativo entre eslabones sucesivos. Esta
observación sugiere una ecuación que determinará los grados de libertad de una cadena de n
eslabones conectados porfi juntas de pasador, con la tierra (el eslabón fijo) considerado co-mo uno de los eslabones: .
grados de libertad = F = 3(n - 1) - 2ft (1.1)
La ecuación (1.1) se conoce como ecuación de Gruebler. El número de eslabones móviles es(n - 1). La junta de pasador permite un grado de libertad relativo entre dos eslabones, de ahíla notaciónj]. Esta ecuación es una de las ecuaciones de movilidad más popular usada en lapráctica. Para otras versiones, véase la Ref. 76 Yel capítulo 8 de este libro (específicamente,la sección 8.3, "Tipos de síntesis").
La mayoría de las tareas de los mecanismos requieren que una sola entrada sea trans-
mitida a una sola salida. Por esto, los mecanismos de un solo grado de libertad, es decir,aquellos que tienen un movimiento restringido, son los tipos más frecuentemente usados. Porejemplo, es fácil ver intuitivamente que las cuatro barras en la figura 1.1a es un eslabonamien-to con un solo grado de libertad. Un análisis intuitivo sobre grados de libertad puede procedercomo sigue. Una vez especificada la variable independiente q > , la posición del punto A es co-nocida con respecto aA a y Ba; como las longitudes de la base del acoplador AB y del eslabónde salida BaR son conocidas, BoAB es un triángulo sin movilidad adicional (cero grados de li-bertad) y la posición del resto del eslabonamiento queda determinada. *
Usando la ecuación de Gruebler para determinar el número de grados de libertad del es-labonamiento en la figura 1.1a, tenemos
n=4, fl =4
F=3(4-1)-2(4)=+1
El +1 indica un solo grado de libertad para el eslabonamiento. Como una demostraciónadicional del uso de la ecuación de Gruebler, refiérase al mecanismo de seis barras Watt 1 enla figura 1.l3a.
n=6, f =7
F=3(6-1)-2(7)=+1
• En realidad, hay dos posibles circuitos (llamados a veces ramas) para el resto de las cuatro barras (ABBo)'
imágenes especulares respecto a la diagonal BoA en que los eslabones AB y BBo podrían ensamblarse. Sin embargo,
el eslabonamiento no puede moverse de un circuito al otro sin desensamblarse. Así, el número de grados de libertad
de un eslabonamiento es independiente del hecho de que el mecanismo pueda tener varios circuitos diferentes. Por"
tanto, podría formularse la definición intuitiva de grados de libertad como sigue: Cuando, después de especificar n
coordenadas (x, y, y/o fJ ) de posiciones de eslabones, las posibles posiciones de los eslabones restantes son finitas, el
número de grados de libertad es n. El concepto de circuitos y ramas se verá en el capítulo 3 (véase especialmente la
Fig.3.14).
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 41/111
Sección 1.7 Grados de libertad 25
a junta detextos an-
e existeor de losn en laindepen-
K.n por pa-
os. Estaena de ndo co-
(1.1)
Intuitivamente, uno puede quedar satisfecho de que este eslabonamiento tiene un sologrado de libertad como lo predice la ecuación. Una vez ensamblados, los eslabones 1 a14 for-man un eslabonamiento de cuatro barras del cual ya se demostró que tiene un solo grado delibertad. Observe que los eslabones 4,3,5 Y 6 forman un segundo eslabonamiento de cuatrobarras con las posiciones de los eslabones 3 y 4 ya determinadas. Como las posiciones de lospuntos Q y R están determinadas, QSR forma un triángulo "rígido" y la posición del meca-nismo entero queda especificada.
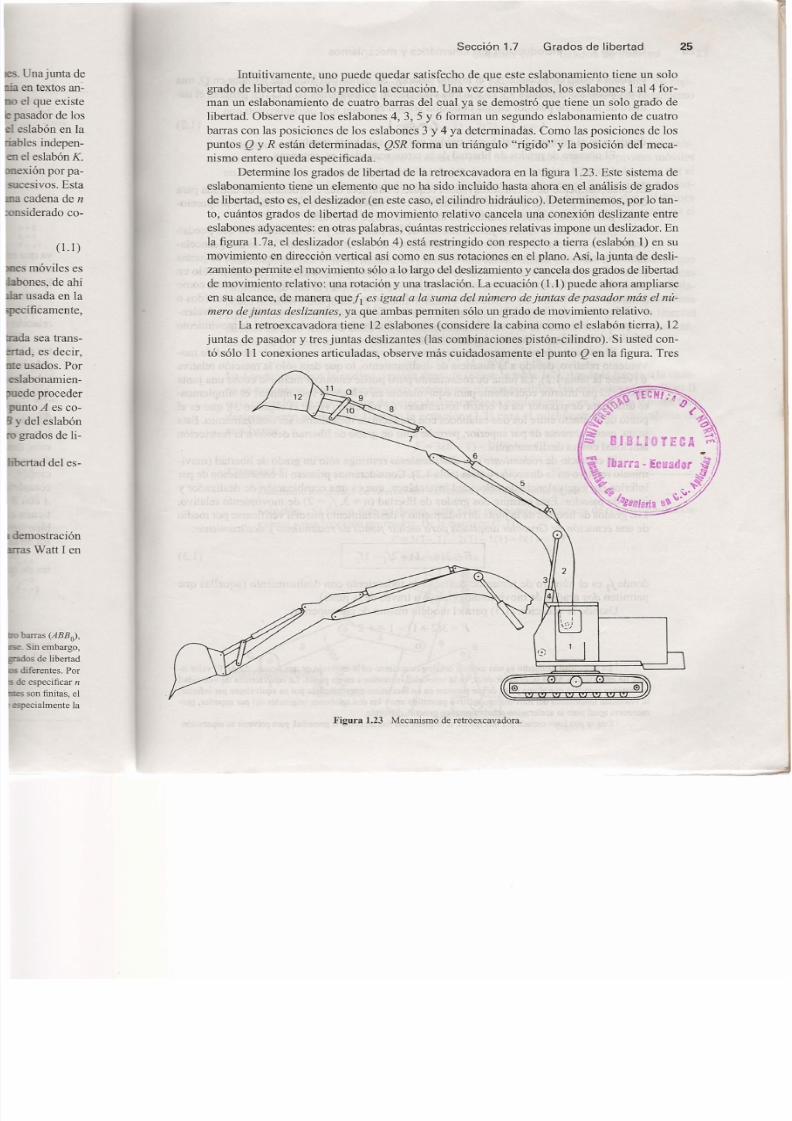
Determine los grados de libertad de la retroexcavadora en la figura 1.23. Este sistema deeslabonamiento tiene un elemento que no ha sido incluido hasta ahora en el análisis de gradosde libertad, esto es, el deslizador (en este caso, el cilindro hidráulico). Determinemos, por lo tan-to, cuántos grados de libertad de movimiento relativo cancela una conexión deslizante entreeslabones adyacentes: en otras palabras, cuántas restricciones relativas impone un deslizador. Enla figura l.7a, el deslizador (eslabón 4) está restringido con respecto a tierra (eslabón 1) en sumovimiento en dirección vertical así como en sus rotaciones en el plano. Así, la junta de desli-zamiento permite elmovimiento sólo a lo largo del deslizamiento y cancela dos grados de libertadde movimiento relativo: una rotación y una traslación. La ecuación (1.1) puede ahora ampliarseen su alcance, de manera quefi es igual a la suma del número de juntas de pasador más el nú-mero de juntas deslizantes, ya que ambas permiten sólo un grado de movimiento relativo.
La retroexcavadora tiene 12 eslabones (considere la cabina como el eslabón tierra), 12juntas de pasador y tres juntas deslizantes (las combinaciones pistón-cilindro). Si usted con-
tó sólo 11 conexiones articuladas, observe más cuidadosamente el punto Q en la figura. Tres
les es, de ahiada en lacamente,
ea trans-
es decir,os. Pornamien-procederA es co-eslabónos de li-
s C ABBo ),
embargo,
de libertad
tes. Por
cificar n
finitas, el
lmente la
d del es-
stración1en
@ 1:2 ,,(.~ , 8 1 2 '2 , ' 1 e n :
'3
Figura 1.23 Mecanismo de retroexcavadora.
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 42/111
26 Capítulo 1 Introducción a la cinemática y mecanismos
eslabones están conectados por el mismo pasador. Se tienen dos juntas de pasador en Q, unaconectando los eslabones 9 y 10 Yla otra conectando los eslabones 10 Y 11. En general, el nú-mero de juntas de pasador en una conexión común es
11=m - 1 (l.2)
donde m es el número de eslabones unidos por una sola junta revoluta.El número de grados de libertad de la retroexcavadora es, entonces,
F= 3(12 -1) - 2(15) =+ 3El eslabonamiento de la retroexcavadora requiere entonces tres coordenadas de entrada paradeterminar la posición de todos sus eslabones con respecto a la cabina. Éstas son proporcio-nadas por los tres cilindros hidráulicos unidos a lo largo del brazo.
¿Existen otros tipos de juntas además de los pasadores y los deslizado res que puedanusarse para conectar los miembros de mecanismos en movimiento plano? Si es así, ¿cancela-rán todos ellos dos grados de libertad? En la tabla 1.2 se muestran otros cinco tipos de juntasplanas. En tanto que las juntas de pasadores y deslizantes (pares inferiores) permiten sólo ungrado de libertad de movimiento relativo, las juntas de pares superiores (juntas definidas cornojuntas que tienen sólo contacto puntual o lineal) pueden permitir un número superior (dos otres) de grados de libertad de movimiento relativo. Cada una tiene un par inferior equivalen-te, que consiste en tantos pares inferiores como el número de grados de libertad de movimientorelativo permitido por la junta de par superior.
El contacto de rodamiento sin deslizamiento permite sólo un grado de libertad de mo-vimiento relativo, debido a la ausencia de deslizamiento, lo que deja sólo la rotación relativae (véase la tabla 1.2). La junta de rodamiento puro puede entonces incluirse corno una juntatipo11.El par inferior equivalente para equivalencia en velocidad instantánea+ es simplemen-te una junta de pasador en el centro instantáneo de rotación (véase el capítulo 3), que es elpunto de contacto entre los dos eslabones con contacto de rodamiento sin deslizamiento. Estajunta, esencialmente de par superior, permite sólo un grado de libertad debido a la restricciónadicional contra deslizamientol.
El contacto de rodamiento con deslizamiento restringe sólo un grado de libertad (movi-miento relativo en la dirección y en la tabla 1.2). Consideremos primero la combinación de parinferior por equivalencia de velocidad instantánea, que es una combinación de deslizador yjunta de pasador. Ésta permite dos grados de libertad (n = 3,f i = 2) de movimiento relativo.Los grados de libertad de la junta de rodamiento y deslizamiento pueden verificarse por medio
de una ecuación de Gruebler ampliada para incluir juntas de rodamiento y deslizamiento:
I F= 3(n -1) - 21 1 -1J; (1.3)
donde J ; es el número de juntas de contacto de rodamiento con deslizamiento (aquellas quepermiten dos grados de movimiento relativo a través de la junta).
Usando la ecuación (1.3) para el modelo mismo de par superior,
F=3(2-l)-1 =+2
t La velocidad promedio es una medida del desplazamiento en el intervalo en que ocurre, tssltst, El valor lí-mite de ésta cuando /' ,. t ~ O, es decir dsldt, es la velocidad instantánea en un punto. La equivalencia de velocidadinstantánea significa que si una junta de par superior en un mecanismo se reemplaza por su equivalente par inferior,
la velocidad instantánea del movimiento relativo permitido enh·e los dos eslabones originales del par superior, per-
manecerá igual pero la aceleración relativa será, en general, diferente.t Ésta es una junta cerrada por una fuerza: se requiere una fuerza, como la gravedad, para prevenir su separación.
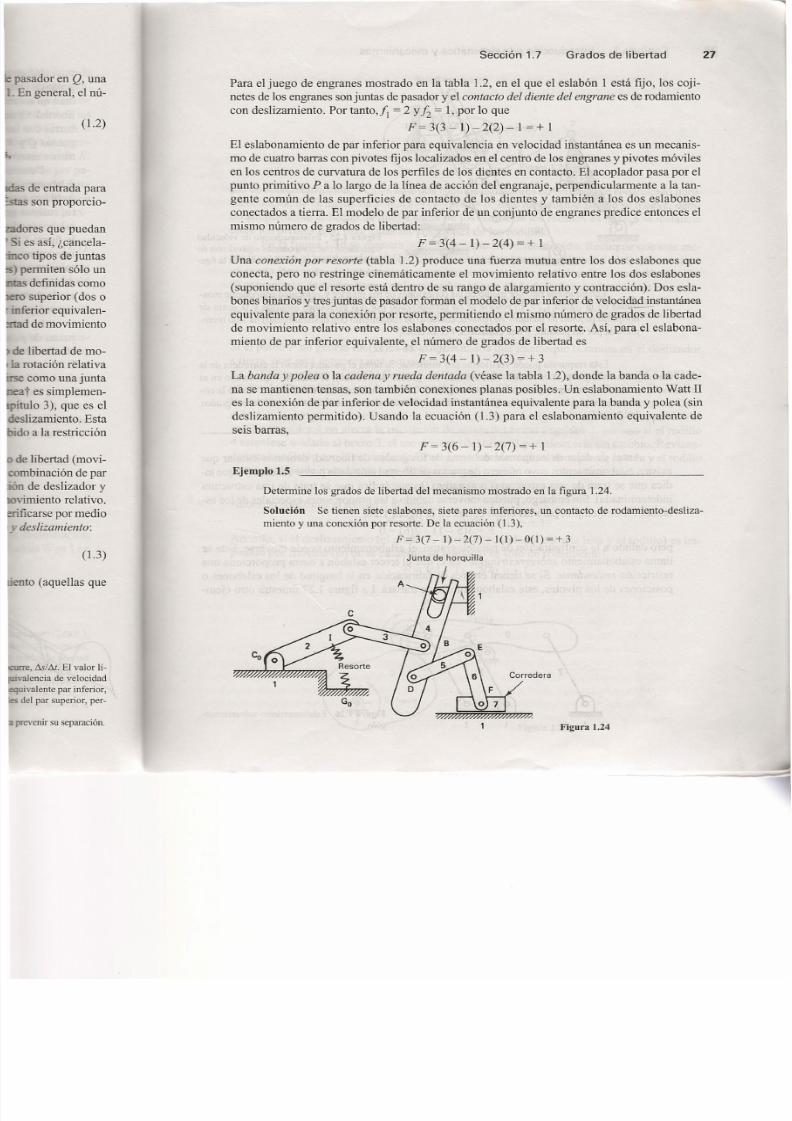
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 43/111
Sección 1.7 Grados de libertad 27
or en Q, unaneral, el nú-
(1.2)
Para el juego de engranes mostrado en la tabla 1.2, en el que el eslabón 1 está fijo, los coji-netes de los engranes son juntas de pasador y el contacto del diente del engrane es de rodamientocon deslizamiento. Por tanto.j', = 2 Yfi = 1, por lo que
F= 3(3 - 1) - 2(2) - 1=+ 1
El eslabonamiento de par inferior para equivalencia en velocidad instantánea es un mecanis-mo de cuatro barras con pivotes fijos localizados en el centro de los engranes y pivote s móvilesen los centros de curvatura de los perfiles de los dientes en contacto. El acoplador pasa por elpunto primitivo P a lo largo de la línea de acción del engranaje, perpendicularmente a la tan-gente común de las superficies de contacto de los dientes y también a los dos eslabonesconectados a tierra. El modelo de par inferior de un conjunto de engranes predice entonces elmismo número de grados de libertad:
F=3(4-1)-2(4)=+1
Una conexión por resorte (tabla 1.2) produce una fuerza mutua entre los dos eslabones queconecta, pero no restringe cinemáticamente el movimiento relativo entre los dos eslabones(suponiendo que el resorte está dentro de su rango de alargamiento y contracción). Dos esla-bones binarios y tres juntas de pasador forman el modelo de par inferior de velocidad instantáneaequivalente para la conexión por resorte, permitiendo el mismo número de gradoSde libertadde movimiento relativo entre los eslabones conectados por el resorte. Así, para el eslabona-miento de par inferior equivalente, el número de grados de libertad es
F= 3(4 -1) - 2(3) =+ 3La banda y polea o la cadena y rueda dentada (véase la tabla 1.2), donde la banda o la cade-na se mantienen tensas, son también conexiones planas posibles. Un eslabonamiento Watt IIes la conexión de par inferior de velocidad instantánea equivalente para la banda y polea (sindeslizamiento permitido). Usando la ecuación (1.3) para el eslabonamiento equivalente deseis barras,
entrada paraproporcio-
s que puedanasí, ¿cancela-pos de juntasiten sólo uninidas comoperior (dos oor equivalen-e movimiento
ertad de mo-ción relativao una juntas simplemen-3), que es eliento. Estala restricción
F=3(6-1)-2(7) =+ 1bertad (movi-nación de pardeslizador y
nto relativo.por medio
zamiento:
Ejemplo 1.5
Determine los grados de libertad del mecanismo mostrado en la figura 1.24.
Solución Se tienen siete eslabones, siete pares inferiores, un contacto de rodamiento-desliza-miento y una conexión por resorte. De la ecuación (1.3),
F =3(7 - 1) - 2(7) - 1(1) - 0(1) =+ 3(1.3) Junta de horquilla
C o
Figura 1.24
ls /!J .t. El valor lí-
cia de velocidade par inferior,
par superior, per-

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 44/111
Capítulo 1 Introducción a la cinemática y mecanismos8
8
Figura 1.25 Eslabonamiento de velocidad
equivalente con componentes equivalentes de
par inferior, en comparación con el de la figu-ra 1.24.
Verifiquemos esto por medio de las conexiones de par inferior y velocidad equivalente mos-tradas en la figura 1.25. El resorte se ha reemplazado por dos eslabones bina.rios y lajunta de
horquilla (o junta de pasador en ranura, contacto de rodamiento con deslizamiento) ha sido reem-
plazada por un pasador y una corredera. Por lo tanto,
F=3(10-1)-2(12)=+3
Esta respuesta puede verificarse por intuición. Si tanto el pasador como la corredera de lajunta en el punto A están fijos (cancelando dos grados de libertad), el eslabón 4 queda fijo en elplano. Sin embargo, la corredera-manivela (DEF) tiene aún libertad de movimiento. Como la co-rredera-manivela tiene sólo un grado de libertad, el mecanismo entero tiene un total de tres gradosde libertad.
Antes de dejar de ocupamos del tema de los grados de libertad, debemos señalar queexisten eslabonamientos cuyo número de grados de libertad calculado puede ser cero (lo que in-dica que se trata de una estructura) o negativo (lo que indica que se trata de una estructuraindeterminada). Sin embargo, pueden moverse debido a las proporciones especiales de los es-labones. Por ejemplo, para las cinco barras en la figura 1.26,
F= 3(5 -1) - 2(6) =Opero debido a la configuración de paralelogramo, el eslabonamiento puede moverse. Éste sellama eslabonamiento sobrerrestringido, en el que el tercer eslabón a tierra proporciona unarestricción redundante. Si se tienen errores de fabricación en la longitud de los eslabones oposiciones de los pivotes, este eslabonamiento se trabará. La figura 1.27 muestra otro ejem-
Figura 1.26 Eslabonamiento sobrerrestrin-gido.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 45/111
velocidad
alentes de
l de la figu-
dera de lafijo en el
mo la co-es grados
lar queo que in-structurae los es-
. Éste seona unabones oro ejem-
rerrestrin-
Sección 1.7 Grados de libertad 29
Rodamiento puro
Figura 1.27
plo de sobrerrestricción. Vemos aquí dos rodillos estiradores en contacto de rodamiento puro.La ecuación de Gruebler da F = 3(3 - 1) - 2(3) = O.Este mecanismo simple se mueve, debi-do simplemente al hecho de que la suma de los radios de los rodillos es igual a la distanciaentre los pivotes fijos para todas las posiciones de los rodillos.
En la figura 1.3d se muestra otro mecanismo sobrerrestringido. Recuerde que este me-canismo para el bombeo de petróleo consiste en cuatro barras (eslabones 1 al 4) que contieneun punto P trazador de trayectoria que genera una trayectoria aproximadamente de línea recta.El mecanismo de cuatro barras es impulsado por una díada 5, 6, formándose así un mecanis-mo de seis barras (que hemos visto que tiene un solo grado de libertad). Este eslabonamientode seis barras está conectado a un deslizador a tierra por el eslabón 7. Tenemos entonces,
F = 3(7 - 1) - 2(9) = O
Si el punto P no genera una linea recta aproximada que interseque la ranura en el deslizador
a tierra, éste será entonces una estructura.Existen casos en que la fórmula de Gruebler da un número aparentemente excesivo de
grados de libertad. Esto puede implicar un grado de libertad pasivo o redundante y no altera'la restricción entre los movimientos de salida respecto a los de entrada de un mecanismo. Con-sidere, por ejemplo, el mecanismo de leva y seguidor en la figura 1.28. Aquí, la rotación delrodillo seguidor 4 no afecta la oscilación de salida del brazo seguidor 3. Incluso si el rodillo4 estuviese soldado al brazo 3, el movimiento del brazo 3 permanecería sin cambio. Revisan-do esta condición con la ecuación de Gruebler y considerando el contacto de la leva y el rodillocomo del tipo de rodamiento con deslizamiento,
F=3(4-1)-2(3)-I(I)=+2
Ahora, si soldamos el rodillo 4 al brazo 3,
F = 3(3 - 1) - 2(2) - 1(1) = + 1
Además, si el deslizamiento (el grado de libertad redundante entre la leva y el rodillo) es im-pedido por fricción (en otras palabras, su contacto es sólo de rodamiento),
F=3(4-1)-2(4)=+1
4
Figura 1.28
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 46/111
Capítulo 1 Introducción a la cinemática y mecanismos0
El lector puede verificar que el mecanismo de la ventana batiente en las figuras lA y 1.5 con-tiene un grado de libertad pasivo similar.
1.8 ANÁLISIS VERSUS SíNTESIS
Los procesos de dibujar diagramas cinemáticos y determinar grados de libertad de mecanis-
mos más complejos, son los primeros pasos en el proceso de análisis y síntesis cinemática.En el análisis cinemática se investiga un mecanismo particular dado con base en la geome-tría del mecanismo y posiblemente otras características conocidas del mismo (velocidad angularde entrada, aceleración angular, etc.). Por otra parte, la síntesis cinemática es el proceso dediseñar un mecanismo para desempeñar una tarea deseada. Aquí, tanto el tipo (tipo de sínte-sis) como las dimensiones (síntesis dimensional) del nuevo mecanismo pueden ser parte dela síntesis cinemática (véanse los capítulos 2 y 8).
Los fundamentos descritos en este capítulo son más importantes en las etapas inicialesdel análisis o de la síntesis. La capacidad de visualizar el movimiento relativo, de entenderpor qué un mecanismo está diseñado de cierta menera y la capacidad de mejorar un diseñodeterminado, son características de un ingeniero bien versado en cinemática. Si bien parte deesta habilidad se evidencia en forma de una creatividad interna, otra gran parte de ella es unahabilidad aprendida que puede mejorarse con la práctica. El capítulo 2 ayudará a poner el di-
seño de mecanismos en perspectiva: ese capítulo describe la estructura o metodología deldiseño, incluido el análisis y síntesis cinemáticos. Sin embargo, antes de esto, veamos un es-tudio de caso sobre el diseño de mecanismos.
1.9 EJEMPLO DE DISEÑO DE UN MECANISMO: TRANSMISiÓN
DE VELOCIDAD VARIABLE [27]
En el capítulo 1 se han visto algunos procedimientos para el diseño de mecanismos. Veamosbrevemente cómo se resuelve un problema real usando algunos de esos procedimientos. Laexperiencia que se obtenga con este estudio de caso puede ayudar a motivar al estudiante enel aprendizaje de procedimientos así como a desarrollar cierta intuición sobre el proceso deldiseño de mecanismos (que se verá más ampliamente en el capítulo 2).
El ejemplo escogido es el rediseño de un mecanismo de control para una transmisiónpor banda en V de velocidad variable, similar al de la figura 1.29. El primer diseño (Fig. 1.30)hacía uso de la inercia de contrapesos en forma de levas sometidas a la fuerza centrífuga de unapolea de dos piezas en rotación, para cambiar la posición axial de la mitad móvil de la polea,de la polea motriz de la transmisión por banda en V. La fuerza de inercia cambiaba la posi-ción axial de la mitad de la polea y la distancia de la banda desde la línea de centros de lapolea. El nuevo concepto usa mecanismos de deslizador y manivela (Figs. 1.31 a la 1.36),lográndose un diseño muy mejorado.
La velocidad angular relativa entre las flechas de entrada y salida conectadas por ban-das en V es inversamente proporcional a los radios entre la línea de centros de las flechasmotriz y de salida y la banda. Se obtiene una velocidad variable al cambiar esos radios (comose muestra en las Figs. 1.31 a la 1.36). La figura 1.31 (tomada de una aplicación de patente)
ilustra la dificultad inicial de interpretar dibujos técnicos de maquinaria. Los diagramas cine-máticos son de gran ayuda para distinguir los eslabones de los miembros estructurales. Observe
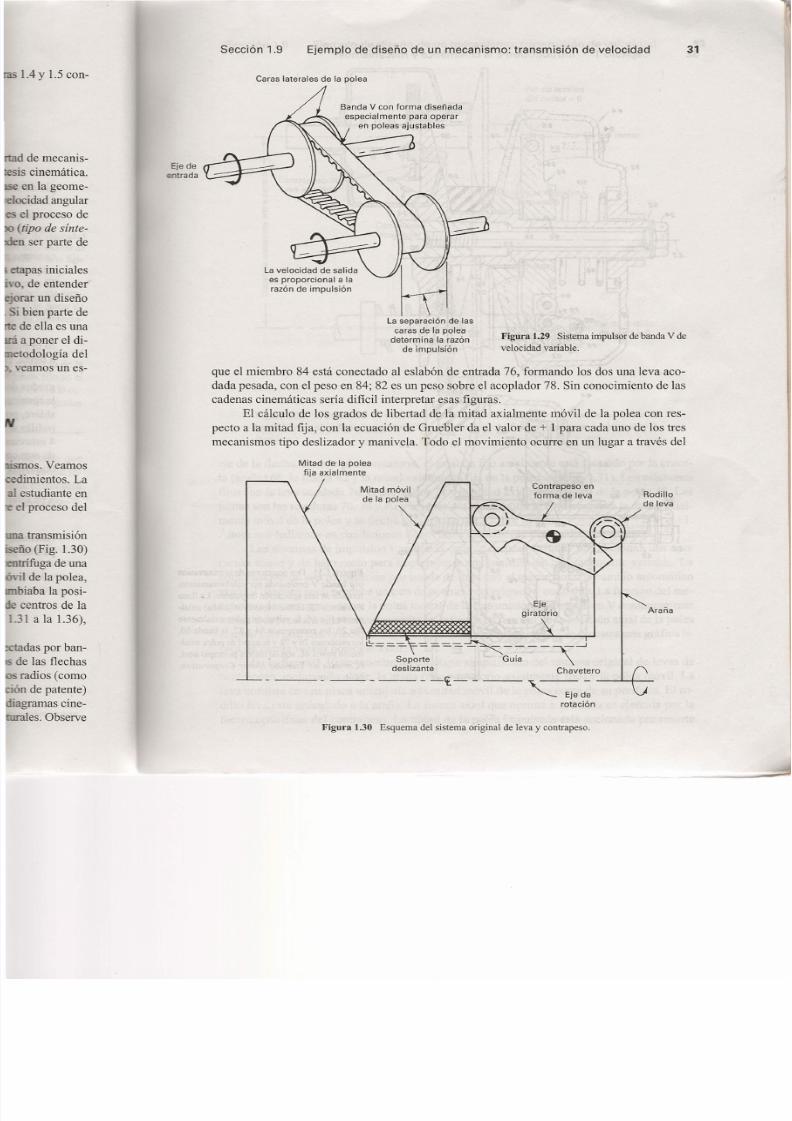
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 47/111
Y 1.5 con-
mecanis-
.la geome-d angular
roceso dede sinte-r parte de
E je de
entrada
inicialesentenderun diseñon parte della es unaner el di-
logía delos un es-
nsmisiónig. 1.30)ga de unala polea,a la posi-tros de lala 1.36),
por ban-s flechass (comopatente)mas cine-
. Observe
Sección 1.9 Ejemplo de diseño de un mecanismo: transmisión de velocidad
Caras laterales de la polea
Banda V con forma diseñadaespecialmente para operaren poleas a ju sta b les
Figura 1.29 Sistema impulsor de banda V de
velocidad variable.
que el miembro 84 está conectado al eslabón de entrada 76, formando los dos una leva aco-dada pesada, con el peso en 84; 82 es un peso sobre el acoplador 78. Sin conocimiento de lascadenas cinemáticas sería dificil interpretar esas figuras.
El cálculo de los grados de libertad de la mitad axialmente móvil de la polea con res-pecto a la mitad fija, con la ecuación de Gruebler da el valor de + 1para cada uno de los tresmecanismos tipo deslizador y manivela. Todo el movimiento ocurre en un lugar a través del
Mitad de la poleafija axialmente
Contrapeso enforma de leva Rodillo
de leva
Mitad móvilde la polea
E je
giratorio Araña
&===\ ====~- - - - , - ~Soporte Guía \deslizante Chavetero
--------- -<t.- - --- ~ Ej ed~
rotación
Figura 1.30 Esquema del sistema original de leva y contrapeso.
31
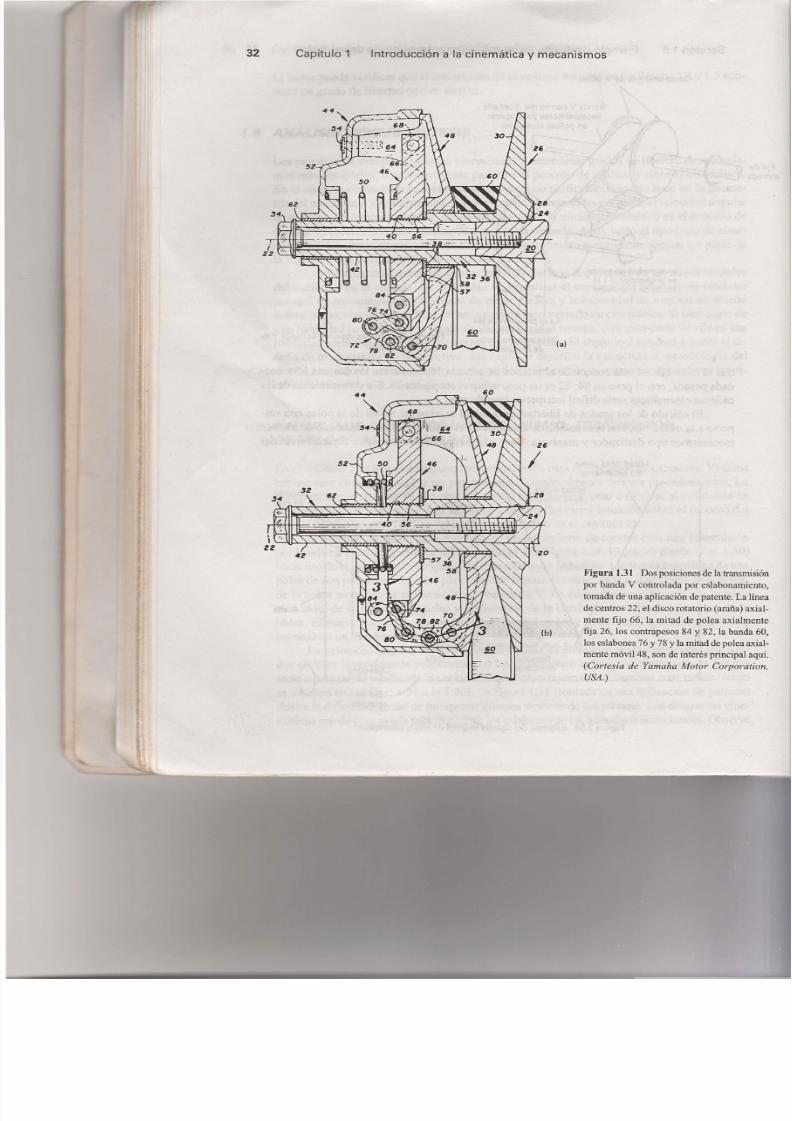
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 48/111
Figura 1.31 Dos posiciones de la transmisión
por banda V controlada por eslabonamiento,
tomada de una aplicación de patente. La línea
de centros 22, el disco rotatorio (araña) axial-
mente fijo 66, la mitad de polea axialmente
fija 26, los contrapesos 84 y 82, la banda 60,los eslabones 76 y 78 Yla mitad de polea axial-
mente móvil 48, son de interés principal aquí.
(Cortesía de Yamaha Motor Corporation,
USA.)
32 Capítulo 1 Introducción a la cinemática y mecanismos
2~~~. ~(i~. '-~1~~~~~
(a)
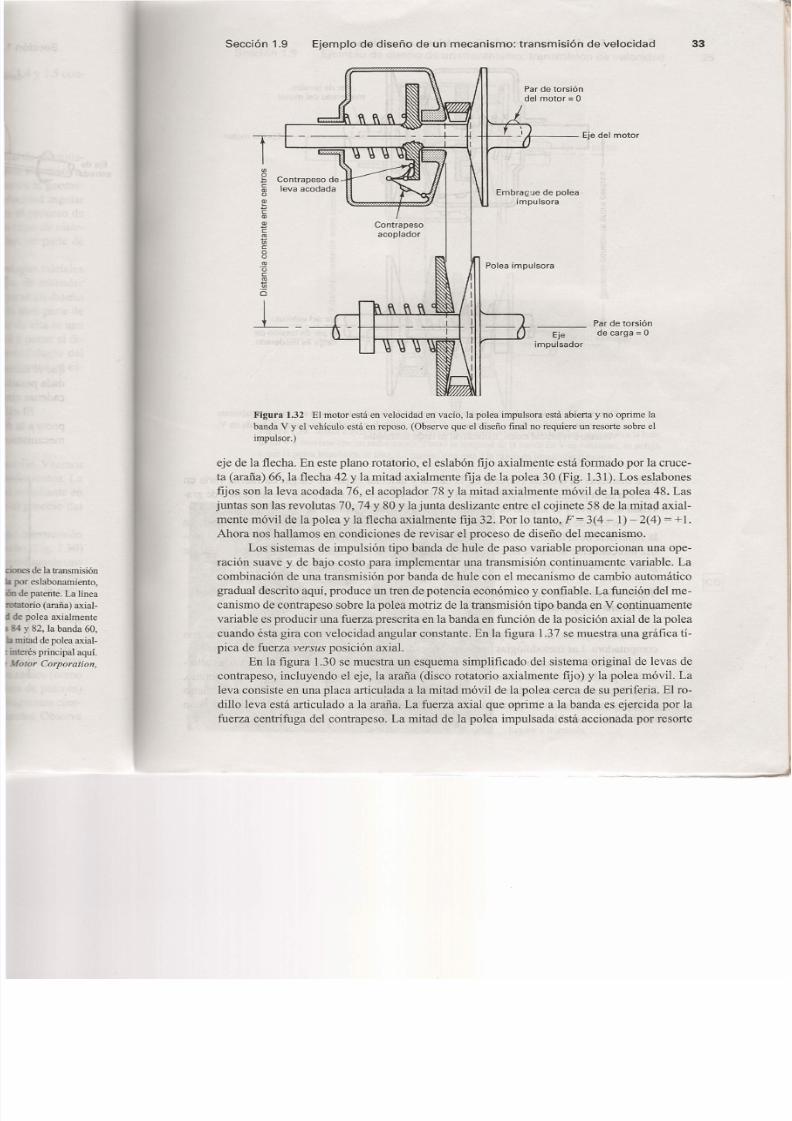
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 49/111
e la t ransmisión
labonamiento,. La línea
(araña) axial-
a axialmente
2, la banda 60,de polea axial-
principal aquí.
Corporation,
Sección 1.9 Ejemplo de diseño de un mecanismo: transmisión de velocidad 33
Par de torsióndel motor = O
Á Eje del motor
VI
g Contrapeso de: ¡ ¡ leva acodada< . >
~< : :
' "'"e~VI< : :oo
'"(3< : :
'"í(5
Embrague de poleaimpulsara
Polea impulsara
L Par de torsiónEje de carga = O
impulsador
Figura 1.32 El motor está en velocidad en vacío, la polea impulsara está abierta y no oprime la
banda V y el vehículo está en reposo. (Observe que el diseño final no requiere un resor te sobre el
impulsor.)
eje de la flecha. En este plano rotatorio, el eslabón fijo axialrnente está formado por la cruce-ta (araña) 66, la flecha 42 y la mitad axialrnente fija de la polea 30 (Fig. 1.31). Los eslabonesfijos son la leva acodada 76, el acoplador 78 y la mitad axialmente móvil de la polea 48. Lasjuntas son las revolutas 70, 74 Y80 Yla junta deslizante entre el cojinete 58 de la mitad axial-mente móvil de la polea y la flecha axialrnente fija 32. Por lo tanto, F =3(4- 1) - 2(4) =+1.
Ahora nos hallamos en condiciones de revisar el proceso de diseño del mecanismo.Los sistemas de impulsión tipo banda de hule de paso variable proporcionan una ope-
ración suave y de bajo costo para implementar una transmisión continuamente variable. Lacombinación de una transmisión por banda de hule con el mecanismo de cambio automático
gradual descrito aquí, produce un tren de potencia económico y confiable. La función del me-canismo de contrapeso sobre la polea motriz de la transmisión tipo banda en V continuamentevariable es producir una fuerza prescrita en la banda en función de la posición axial de la poleacuando ésta gira con velocidad angular constante. En la figura 1.37 se muestra una gráfica tí-pica de fuerza versus posición axial.
En la figura 1.30 se muestra un esquema simplificado del sistema original de levas decontrapeso, incluyendo el eje, la araña (disco rotatorio axialrnente fijo) y la polea móvil. La
leva consiste en una placa articulada a la mitad móvil de la polea cerca de su periferia. El ro-
dillo leva está articulado a la araña. La fuerza axial que oprime a la banda es ejercida por lafuerza centrifuga del contrapeso. La mitad de la polea impulsada está accionada por resorte
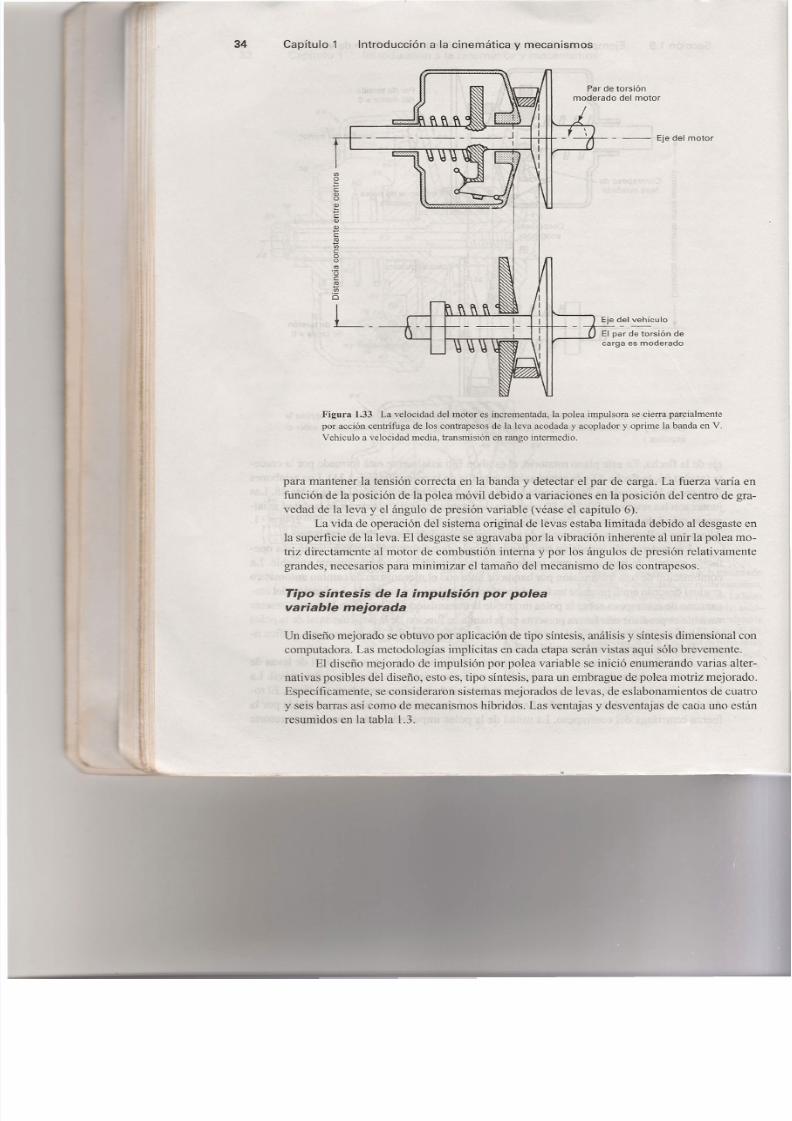
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 50/111
Figura 1.33 La velocidad del motor es incrementada, la polea impulsora se cierra parcialmente
por acción centrífuga de los contrapesos de la leva acodada y acoplador y oprime la banda en V.
Vehículo a velocidad media, transmisión en rango intermedio.
34 Capítulo 1 Introducción a la cinemática y mecanismos
- --- Eje del motor
!IJ
geIDu
eEID
~eJ 9!IJeOuc o
'(3
e
J 9!IJ
e s
L_
para mantener la tensión correcta en la banda y detectar el par de carga. La fuerza varía enfunción de la posición de la polea móvil debido a variaciones en la posición del centro de gra-vedad de la leva y el ángulo de presión variable (véase el capítulo 6).
La vida de operación del sistema original de levas estaba limitada debido al desgaste en
la superficie de la leva. El desgaste se agravaba por la vibración inherente al unir la polea mo-triz directamente al motor de combustión interna y por los ángulos de presión relativamentegrandes, necesarios para minimizar el tamaño del mecanismo de los contrapesos.
Tipo síntesis de la impulsión por polea
variable mejorada
Un diseño mejorado se obtuvo por aplicación de tipo síntesis, análisis y síntesis dimensional concomputadora. Las metodologías implícitas en cada etapa serán vistas aquí sólo brevemente.
El diseño mejorado de impulsión por polea variable se inició enumerando varias alter-nativas posibles del diseño, esto es, tipo síntesis, para un embrague de polea motriz mejorado.Específicamente, se consideraron sistemas mejorados de levas, de eslabonamientos de cuatroy seis barras así como de mecanismos híbridos. Las ventajas y desventajas de cacia uno estánresumidos en la tabla 1.3.
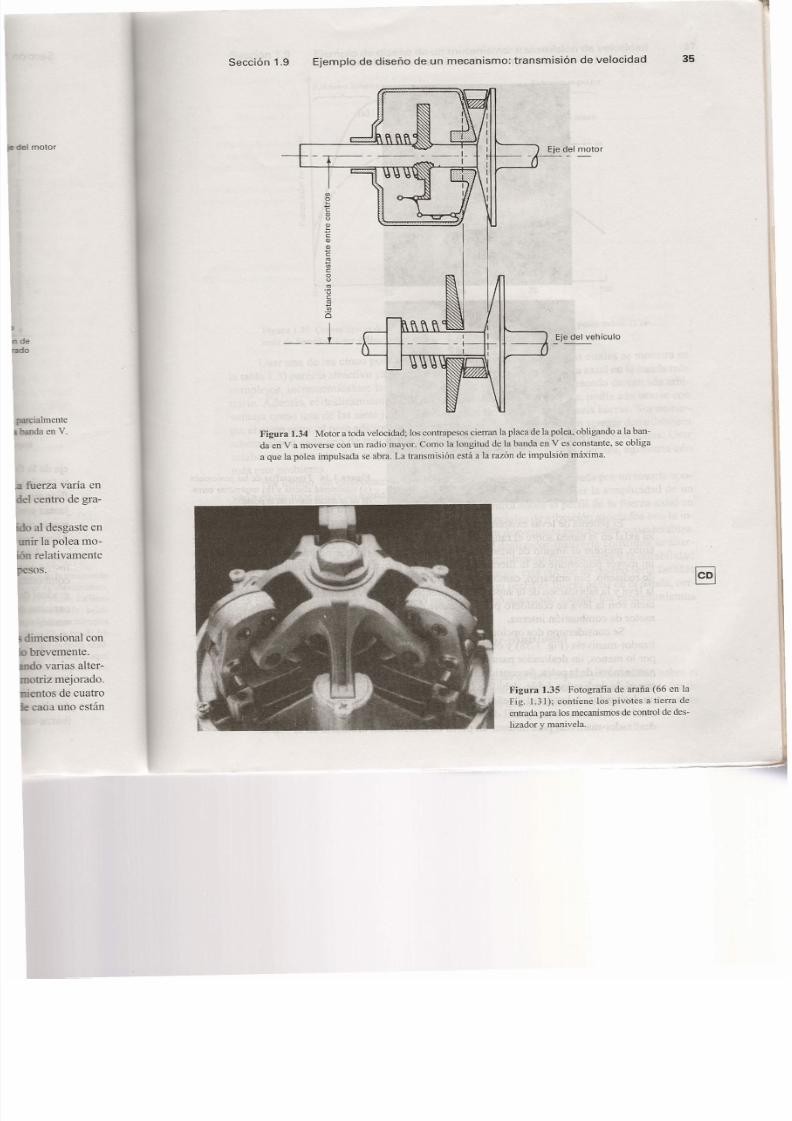
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 51/111
otor
rnente
a en V.
rza varía enentro de gra-
s.
nsional conevemente.varias alter-iz mejorado.tos de cuatrocia uno están
Sección 1.9 Ejemplo de diseño de un mecanismo: transmisión de velocidad
(/)
eeIDu
~eID
ID
e~(/)
eOu
'"üe
'"íO
Eje del vehículo
Figura 1.34 Motor a toda velocidad; los contrapesos cierran la placa de la polea, obligando a la ban-
da en V a moverse con un radio mayor. Como la longitud de la banda en V es constante, se obliga
a que la polea impulsada se abra. La transmisión está a la razón de impulsión máxima.
Figura 1.35 Fotografia de araña (66 en la
Fig. 1.31); contiene los pivotes a tierra de
entrada para los mecanismos de control de des-
lizador y manivela.
35
§]

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 52/111
Capítulo 16 Introducción a la cinemática y mecanismos
(a)
Figura 1.36 Fotografías de las posiciones
(a) totalmente abierta y (b) totalmente cerra-
da de la mitad móvil de la polea.
(b)
El sistema de levas existente era atractivo, ya que permitía un control preciso de la fuer-za axial en la banda sobre el rango total de cambio gradual de la polea-embrague motriz. Portanto, mejorar el ángulo de presión del sistema de levas (lo que permitiría la transmisión deun mayor porcentaje de la fuerza de la leva para mover la polea) se consideró una opciónde rediseño. Sin embargo, cambiar el ángulo de presión requeriria incrementar el tamaño dela leva y la fabricación de la superficie de precisión de la leva resultaría cara. Además, el con-tacto con la leva se consideró poco deseable debido a la acusada vibración asociada con elmotor de combustión interna.
Se consideraron dos opciones de diseño de cadenas de cuatro eslabones: uno de tipo des-lizador-manivela (Fig. 1.38) y otro de deslizador doble (tabla 1.3). Ambas opciones incluían,por lo menos, un deslizador para usar la acción inherente de deslizamiento de la mitad axial-mente móvil de la polea. Se consideró que era un diseño más atractivo el de deslizador-manivelaque el de deslizador doble, debido a la mayor durabilidad de su manivela articulada que la deun deslizador. Además, el diseño de manivela parecía ofrecer más flexibilidad para la fuerzaaxial en la banda versus perfil de posición. Sin embargo, parecía difícil dimensionar el tipodeslizador-manivela para obtener un perfil de fuerza axial arbitrario en la banda.
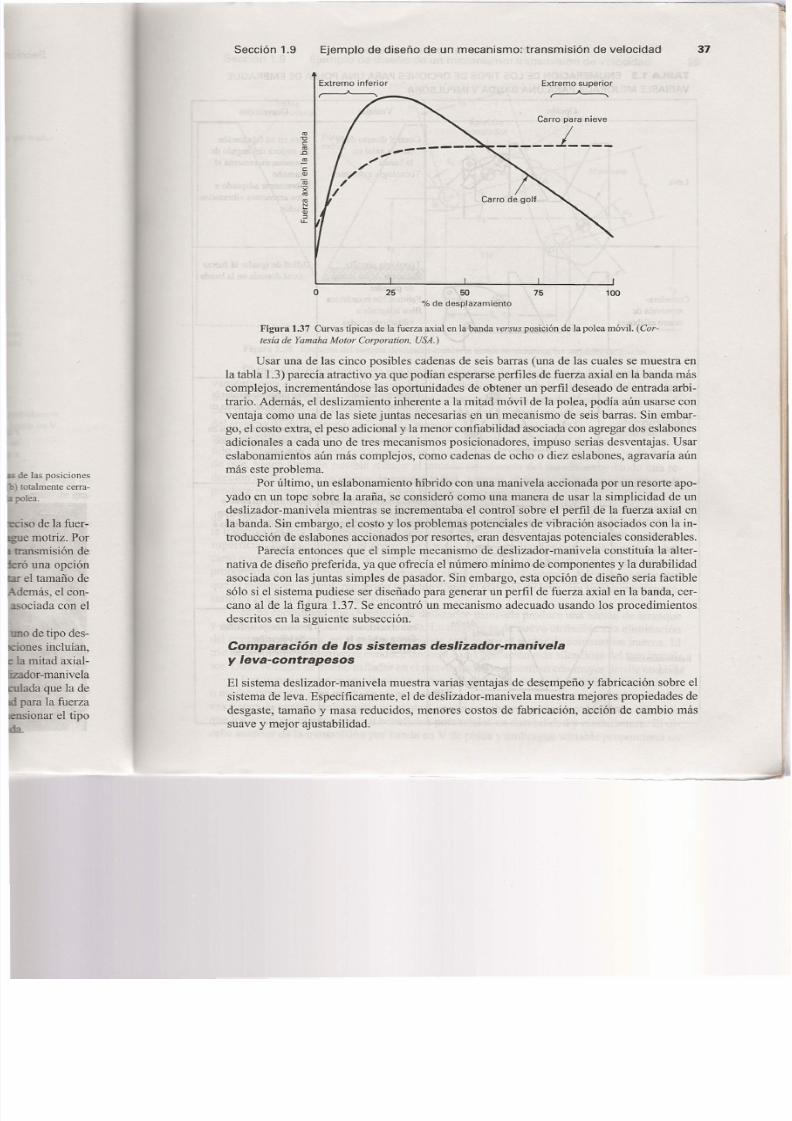
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 53/111
Sección 1.9 Ejemplo de diseño de un mecanismo: transmisión de velocidad 37
'""' "n.!!!
eQ)
'"x'"'"~Q)
: : Ju .. .
Extremo superior,.---A---..
, , ~ " " - - - - - - -
"'I
Carro para nieve
_____J _
o 25 50% de desplazamiento
75 100
Figura 1.37 Curvas típicas de la fuerza axial en la banda versus posición de la polea móvil. (Cor-
tesía de Yamaha Motor Corporation, USA.)
de la fuer-
otriz. Pormisión deopción
tamaño deel con-
da con el
Usar una de las cinco posibles cadenas de seis barras (una de las cuales se muestra enla tabla 1.3) parecía atractivo ya que podían esperarse perfiles de fuerza axial en la banda máscomplejos, incrementándose las oportunidades de obtener un perfil deseado de entrada arbi-trario. Además, el deslizamiento inherente a la mitad móvil de la polea, podía aún usarse conventaja como una de las siete juntas necesarias en un mecanismo de seis barras. Sin embar-go, el costo extra, el peso adicional y la menor confiabilidad asociada con agregar dos eslabonesadicionales a cada uno de tres mecanismos posicionadores, impuso serias desventajas. Usareslabonamientos aún más complejos, como cadenas de ocho o diez eslabones, agravaría aúnmás este problema.
Por último, un eslabonamiento híbrido con una manivela accionada por un resorte apo-yado en un tope sobre la araña, se consideró como una manera de usar la simplicidad de undeslizador-manivela mientras se incrementaba el control sobre el perfil de la fuerza axial cnla banda. Sin embargo, el costo y los problemas potenciales de vibración asociados con la in-
troducción de eslabones accionados por resortes, eran desventajas potenciales considerables.Parecía entonces que el simple mecanismo de deslizador-manivela constituía la alter-
nativa de diseño preferida, ya que ofrecía el número mínimo de componentes y la durabilidadasociada con las juntas simples.de pasador. Sin embargo, esta opción de diseño sería factiblesólo si el sistema pudiese ser diseñado para generar un perfil de fuerza axial en la banda, cer-cano al de la figura 1.37. Se encontró un mecanismo adecuado usando los procedimientosdescritos en la siguiente subsección.
tipo des-incluían,ad axial--rnanivelaque la dela fuerza
el tipo
Comparación de los sistemas deslizador-manivela
y leva-contrapesos
El sistema deslizador-rnanivela muestra varias ventajas de desempeño y fabricación sobre elsistema de leva. Específicamente, el de deslizador-manivela muestra mejores propiedades de
desgaste, tamaño y masa reducidos, menores costos de fabricación, acción de cambio mássuave y mejor ajustabilidad.
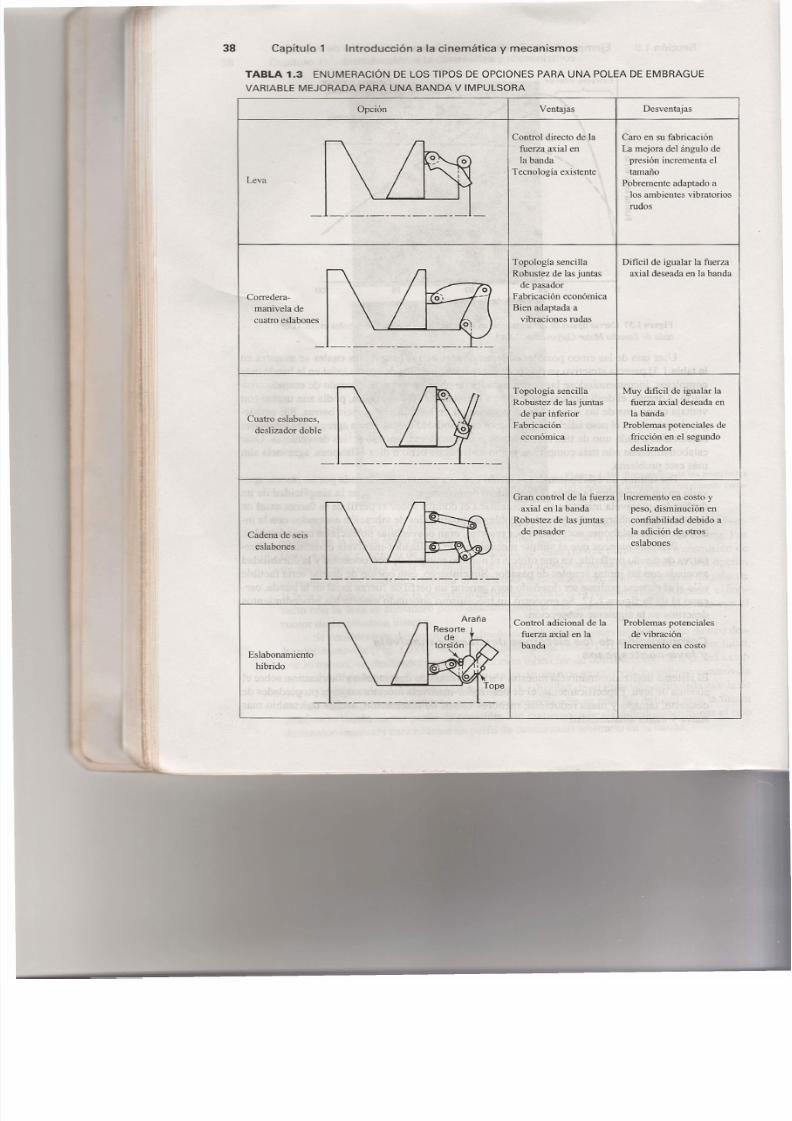
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 54/111
38 Capítulo 1 Introducción a la cinemática y mecanismos
TABLA 1.3 ENUMERACiÓN DE LOS TIPOS DE OPCIONES PARA UNA POLEA DE EMBRAGUE
VARIABLE MEJORADA PARA UNA BANDA V IMPULSORA
Leva
Corredera-
manivela de
cuatro eslabones
Cuatro eslabones,
deslizador doble
Cadena de seiseslabones
Eslabonamiento
híbrido
Opción Ventajas Desventajas
Caro en su fabricación
La mejora del ángulo de
presión incrementa el
tamaño
Pobremente adaptado a
los ambientes vibratorios
rudos
Dificil de igualar la fuerza
axial deseada en la banda
Muy dificil de igualar la
fuerza axial deseada en
la banda
Problemas potenciales de
fricción en el segundo
deslizador
Incremento en costo y
peso, disminución enconfiabilidad debido a
la adición de otros
eslabones
Problemas potenciales
de vibración
Incremento en costo
Control directo de la
fuerza ax ial en
la banda
Tecnología existente
Topología sencilla
Robustez de las juntas
de pasador
Fabricación económica
Bien adaptada a
vibraciones rudas
Topología sencilla
Robustez de las juntas
de par inferior
Fabricación
económica
Gran control de la fuerza
axial en la banda
Robustez de las juntas
de pasador
Control adicional de la
fuerza axial en la
banda
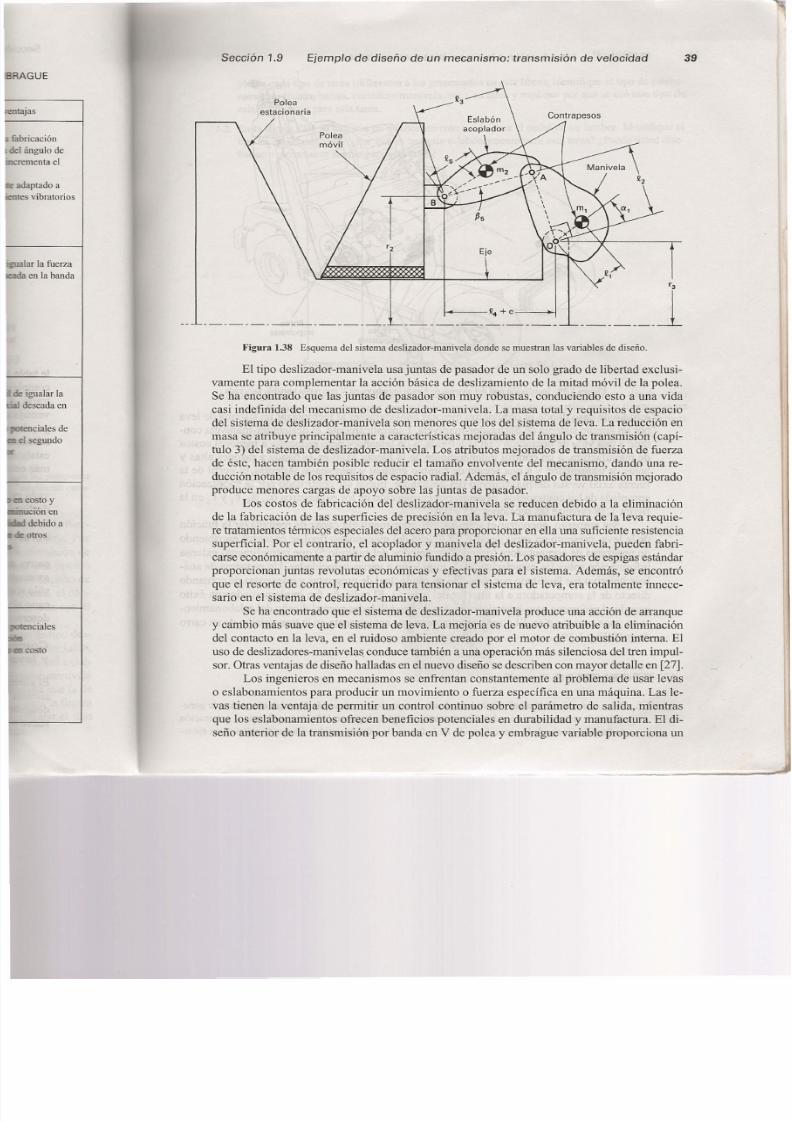
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 55/111
la fuerza
la banda
les
Sección 1.9 Ejemplo de diseño de un mecanismo: transmisión de velocidad 39
Poleaestacionaria
l. ~4+C .1 __Figura 1.38 Esquema del sistema deslizador-manivela donde se muestran las variables de diseño.
El tipo deslizador-manivela usa juntas de pasador de un solo grado de libertad exclusi-vamente para complementar la acción básica de deslizamiento de la mitad móvil de la polea.Se ha encontrado que las juntas de pasador son muy robustas, conduciendo esto a una vidacasi indefinida del mecanismo de deslizador-manivela. La masa total y requisitos de espaciodel sistema de deslizador-manivela son menores que los del sistema de leva. La reducción enmasa se atribuye principalmente a características mejoradas del ángulo de transmisión (capí-tulo 3) del sistema de deslizador-manivela. Los atributos mejorados de transmisión de fuerzade éste, hacen también posible reducir el tamaño envolvente del mecanismo, dando una re-ducción notable de los requisitos de espacio radial. Además, el ángulo de transmisión mejoradoproduce menores cargas de apoyo sobre las juntas de pasador.
Los costos de fabrícación del deslizador-manivela se reducen debido a la eliminaciónde la fabricación de las superficies de precisión en la leva. La manufactura de la leva requie-
re tratamientos térmicos especiales del acero para proporcionar en ella una suficiente resistenciasuperficial. Por el contrario, el acoplador y manivela del deslizador-manivela, pueden fabri-carse económicamente a partir de aluminio fundido a presión. Los pasadores de espigas estándarproporcionan juntas revolutas económicas y efectivas para el sistema. Además, se encontróque el resorte de control, requerido para tensionar el sistema de leva, era totalmente innece-sario en el sistema de deslizador-manivela.
Se ha encontrado que el sistema de deslizador-manivela produce una acción de arranquey cambio más suave que el sistema de leva. La mejoría es de nuevo atribuible a la eliminacióndel contacto en la leva, en el ruidoso ambiente creado por el motor de combustión interna. Eluso de deslizadores-manivelas conduce también a una operación más silenciosa del tren impul-sor. Otras ventajas de diseño halladas en el nuevo diseño se describen con mayor detalle en [27].
Los ingenieros en mecanismos se enfrentan constantemente al problema de usar levaso eslabonamiento s para producir un movimiento o fuerza específica en una máquina. Las le-vas tienen la ventaja de permitir un control continuo sobre el parámetro de salida, mientrasque los eslabonamientos ofrecen beneficios potenciales en durabilidad y manufactura. El di-seño anterior de la transmisión por banda en V de polea y embrague variable proporciona un
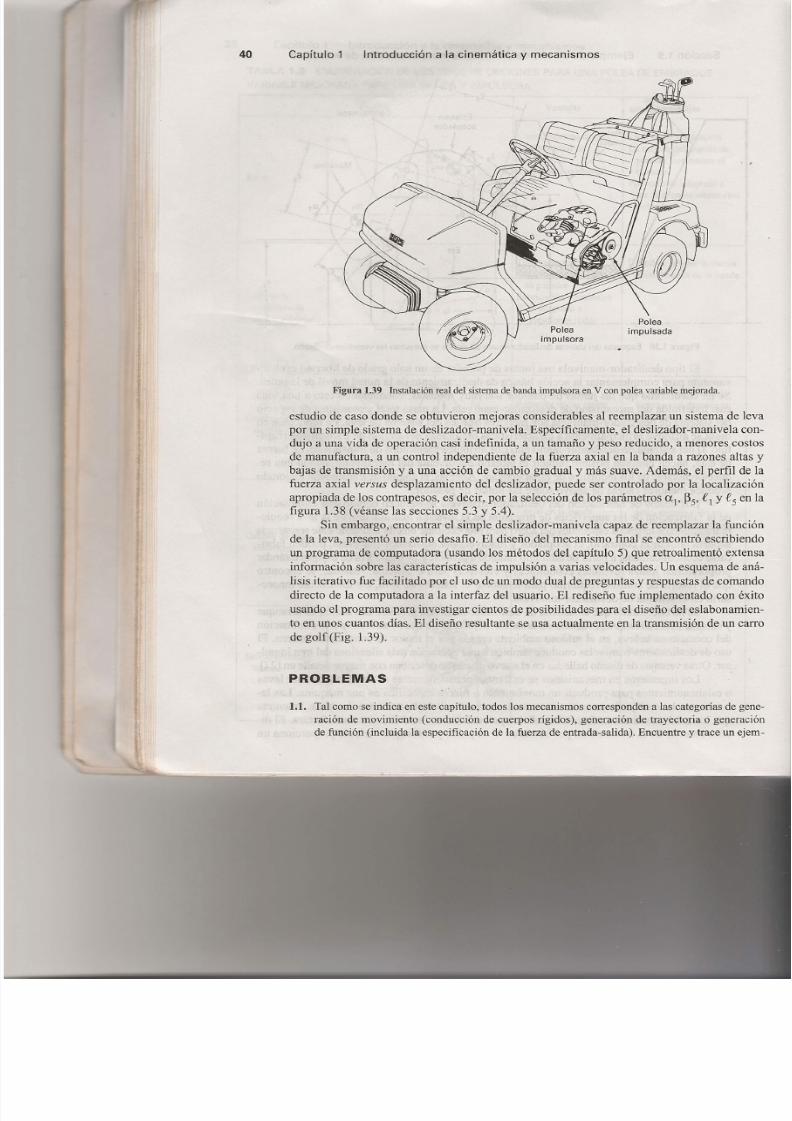
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 56/111
40 Capítulo 1 Introducción a la cinemática y mecanismos
~ -~Figura 1.39 Instalación real del sistema de banda impulsora en V con polea variable mejorada.
estudio de caso donde se obtuvieron mejoras considerables al reemplazar un sistema de levapor un simple sistema de deslizador-manivela. Especificamente, el deslizador-rnanivela con-dujo a una vida de operación casi indefinida, a un tamaño y peso reducido, a menores costosde manufactura, a un control independiente de la fuerza axial en la banda a razones altas ybajas de transmisión y a una acción de cambio gradual y más suave. Además, el perfil de lafuerza axial versus desplazamiento del deslizador, puede ser controlado por la localizaciónapropiada de los contrapesos, es decir, por la selección de los parámetros al' ~5' e 1y e 5 en lafigura 1.38 (véanse las secciones 5.3 y 5.4).
Sin embargo, encontrar el simple deslizador-manivela capaz de reemplazar la funciónde la leva, presentó un serio desafio. El diseño del mecanismo final se encontró escribiendoun programa de computadora (usando los métodos del capítulo 5) que retroalimentó extensainformación sobre las características de impulsión a varias velocidades. Un esquema de aná-lisis iterativo fue facilitado por el uso de un modo dual de preguntas y respuestas de comandodirecto de la computadora a la interfaz del usuario. El rediseño fue implementado con éxitousando el programa para investigar cientos de posibilidades para el diseño del eslabonamien-to en unos cuantos días. El diseño resultante se usa actualmente en la transmisión de un carrode golf (Fig. 1.39).
PROBLEMAS
1.1. Tal como s e indicaen este capítulo, todos los mecanismos corresponden a las categorías de gene-ración de movimiento (conducción de cuerpos rígidos), generación de trayectoria o generaciónde función (incluida la especificación de la fuerza de entrada-salida). Encuentre y trace un ejern-
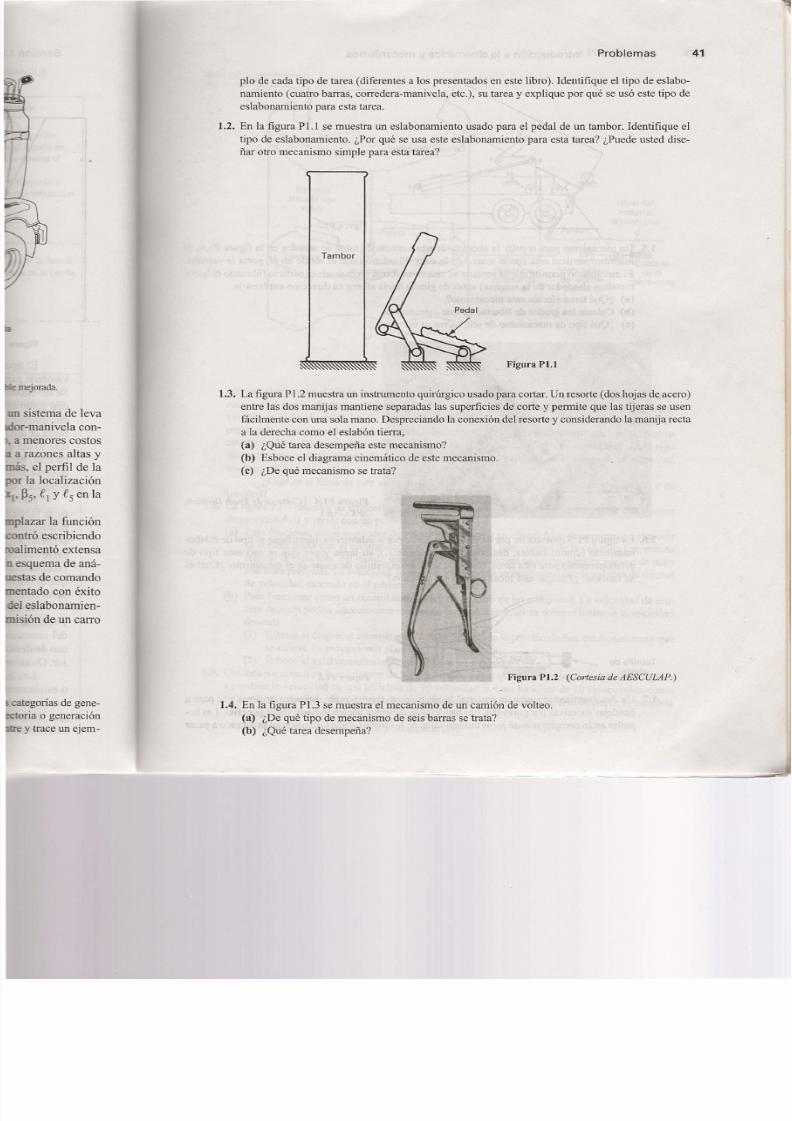
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 57/111
rada.
ema de levaa con-
nores costosones altas yperfil de lalocalización.e l y .e s en la
la función
escribiendoentó extensaema de aná-de comandoo con éxitobonamien-de un carro
rías de gene-o generación
race un ejem-
Problemas 41
plo de cada tipo de tarea (diferentes a los presentados en este libro). Identifique el tipo de eslabo-namiento (cuatro barras, corredera-manivela, etc.), su tarea y explique por qué se usó este tipo de
eslabonamiento para esta tarea.
1.2. En la figura Pl.l se muestra un eslabonamiento usado para el pedal de un tambor. Identifique el
tipo de eslabonamiento. ¿Por qué se usa este eslabonamiento para esta tarea? ¿Puede usted dise-ñar otro mecanismo simple para esta tarea?
Tambor
Figura Pl.1
1.3. La figura Pl.2 muestra un instrumento quirúrgico usado para cortar. Un resorte (dos hojas de acero)entre las dos manijas mantiene separadas las superficies de corte y permite que las tijeras se usenfácilmente con una sola mano. Despreciando la conexión del resorte y considerando la manija rectaa la derecha como el eslabón tierra,
(a) ¿Qué tarea desempeña este mecanismo?(b) Esboce el diagrama cinemático de este mecanismo.(e) ¿De qué mecanismo se trata?
Figura P1.2 (Cortesía de AESCULAP.)
1.4. En la figura Pl.3 se muestra el mecanismo de un camión de volteo.(a) ¿De qué tipo de mecanismo de seis barras se trata?
(b) ¿Qué tarea desempeña?
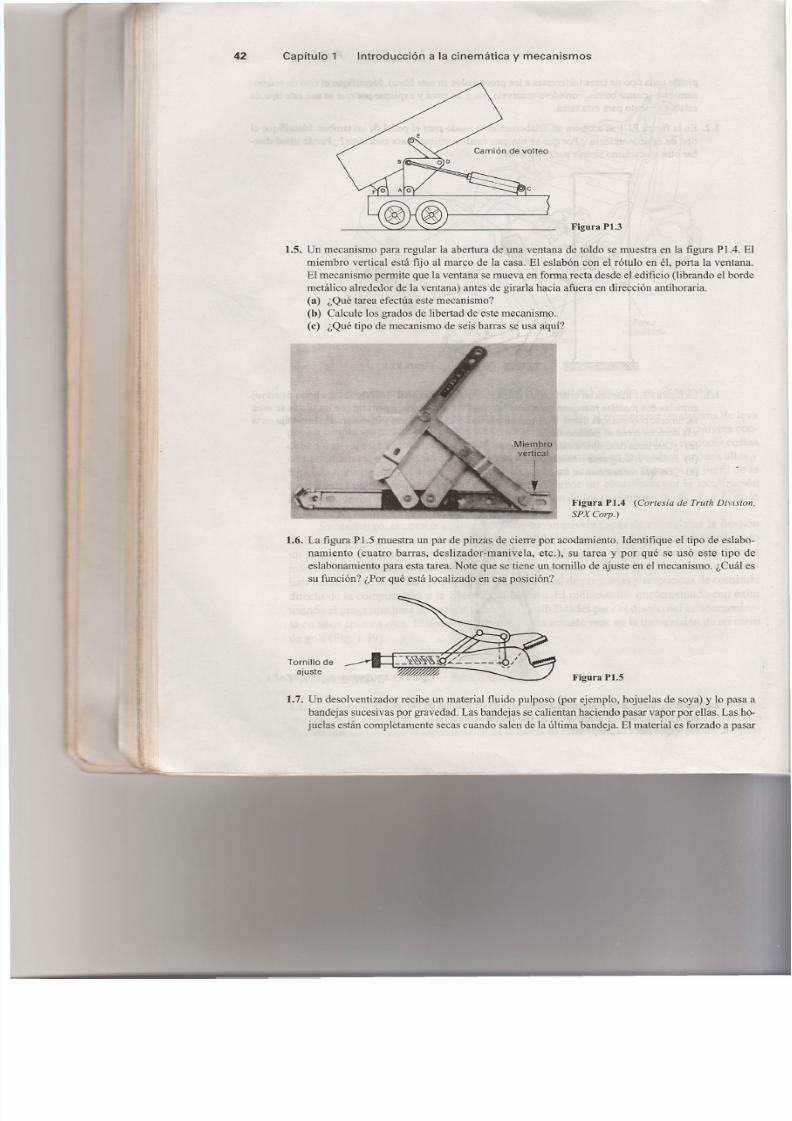
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 58/111
Tornillo de
ajusteFigura P1.5
42 Capítulo 1 Introducción a la cinemática y mecanismos
Camión de volteo
Figura P1.3
1.5. Un mecanismo para regular la abertura de una ventana de toldo se muestra en la figura P1.4. Elmiembro vertical está fijo al marco de la casa. El eslabón con el rótulo en él, porta la ventana.El mecanismo permite que la ventana se mueva en forma recta desde el edificio (librando el bordemetálico alrededor de la ventana) antes de girarla hacia afuera en dirección antihoraria.(a) ¿Qué tarea efectúa este mecanismo?(b) Calcule los grados de libertad de este mecanismo.(e) ¿Qué tipo de mecanismo de seis barras se usa aquí?
Miembro
vertical
Figura P1.4 (Cortesía de Truth Division,
SPXCOlp.)
1.6. La figura P 1.5 muestra un par de pinzas de cierre por acodamiento. Identifique el tipo de eslabo-namiento (cuatro barras, deslizador-manivela, etc.), su tarea y por qué se usó este tipo deeslabonamiento para esta tarea. Note que se tiene un tornillo de ajuste en el mecanismo. ¿Cuál es
su función? ¿Por qué está localizado en esa posición?
1.7. Un desolventizador recibe un material fluido pulposo (por ejemplo, hojuelas de soya) y lo pasa a
bandejas sucesivas por gravedad. Las bandejas se calientan haciendo pasar vapor por ellas. Las ho-juelas están completamente secas cuando salen de la última bandeja. El material es forzado a pasar
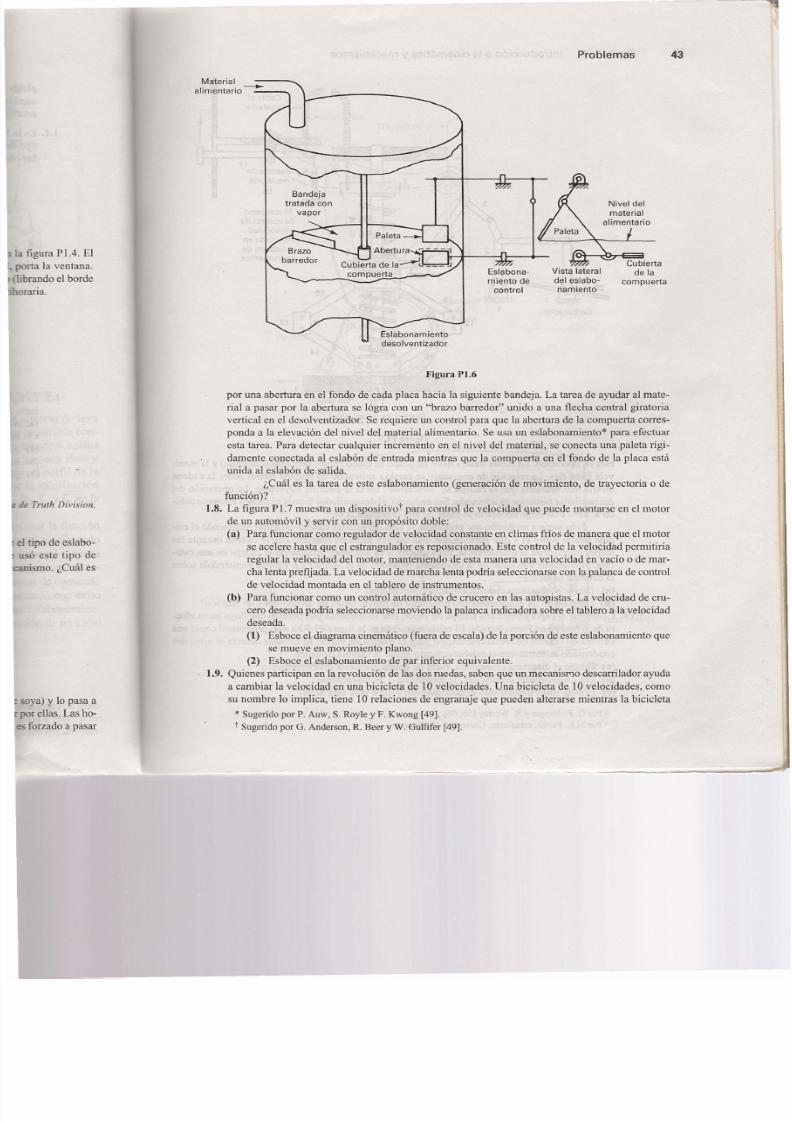
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 59/111
Problemas 43
Material
alimentario ---
ura P1.4. El
la ventana.
do el borde
'lVista lateral
del eslabo-
namiento
Cubierta
dela
compuerta
Bandeja
tratada con
vapor
h Division,
Figura P1.6
por una abertura en el fondo de cada placa hacia la siguiente bandeja. La tarea de ayudar al mate-
rial a pasar por la abertura se logra con un "brazo barredor" unido a una flecha central giratoriavertical en el desolventizador. Se requiere un control para que la abertura de la compuerta corres-ponda a la elevación del nivel del material alimentario. Se usa un eslabonamiento* para efectuar
esta tarea. Para detectar cualquier incremento en el nivel del material, se conecta una paleta rígi-
damente conectada al eslabón de entrada mientras que la compuerta en el fondo de la placa estáunida al eslabón de salida.
¿Cuál es la tarea de este eslabonamiento (generación de movimiento, de trayectoria o defunción)?
1.8. La figura P1.7 muestra un dispositivo" para control de velocidad que puede montarse en el motor
de un automóvil y servir con un propósito doble:
(a) Para funcionar como regulador de velocidad constante en climas fríos de manera que el motorse acelere hasta que el estrangulador es reposicionado. Este control de la velocidad permitiría
regular la velocidad del motor, manteniendo de esta manera una velocidad en vacío o de mar-
cha lenta prefijada. La velocidad de marcha lenta podría seleccionarse con la palanca de control
de velocidad montada en el tablero de instrumentos.
(b) Para funcionar como un control automático de crucero en las autopistas. La velocidad de cru-
cero deseada podría seleccionarse moviendo la palanca indicadora sobre el tablero a la velocidad
deseada.(1) Esboce el diagrama cinemático (fuera de escala) de la porción de este eslabonamiento que
se mueve en movimiento plano.
(2) Esboce el eslabonamiento de par inferior equivalente.1.9. Quienes participan en la revolución de las dos ruedas, saben que un mecanismo descarrilador ayuda
a cambiar la velocidad en una bicicleta de 10 velocidades. Una bicicleta de 10 velocidades, como
su nombre lo implica, tiene 10 relaciones de engranaje que pueden alterarse mientras la bicicleta
* Sugerido por P. Auw, S. Royle y F. Kwong [49].t Sugerido por G. Anderson, R. Beer y W. Gullifer [49].
o de eslabo-
este tipo de
no. ¿Cuál es
) y lo pasa a
ellas. Las ho-do a pasar
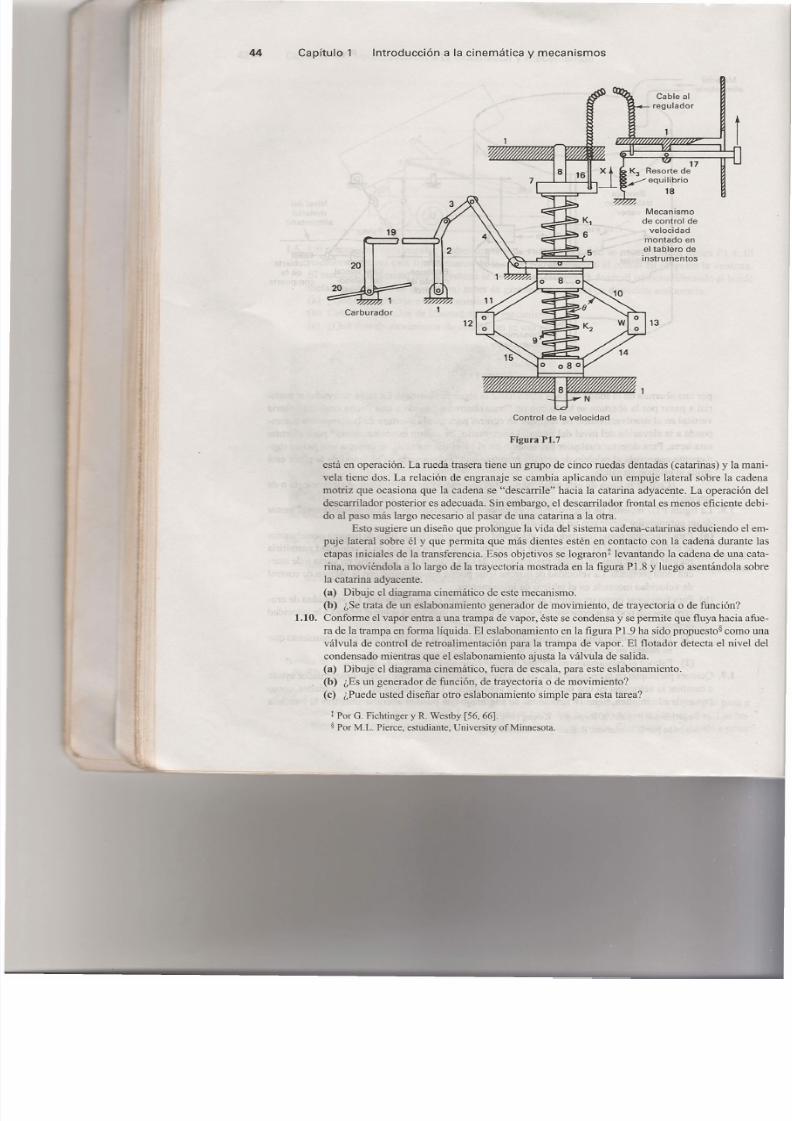
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 60/111
44 Capítulo 1 Introducción a la cinemática y mecanismos
Cable alregulador
t
Mecanismode control develocidadmontado enel tablero deinstrumentos
13
Control de la velocidad
Figura P1.7
está en operación. La rueda trasera tiene un grupo de cinco ruedas dentadas (catarinas) y la mani-
vela tiene dos. La relación de engranaje se cambia aplicando un empuje lateral sobre la cadena
motriz que ocasiona que la cadena se "descarrile" hacia la catarina adyacente. La operación deldescarrilador posterior es adecuada. Sin embargo, el descarrilador frontal es menos eficiente debi-do al paso más largo necesario al pasar de una catarina a la otra.
Esto sugiere un diseño que prolongue la vida del sistema cadena-catarinas reduciendo el em-
puje lateral sobre él y que permita que más dientes estén en contacto con la cadena durante las
etapas iniciales de la transferencia. Esos objetivos se lograronl levantando la cadena de una cata-rina, moviéndola a lo largo de la trayectoria mostrada en la figura P1.8 y luego asentándola sobre
la catarina adyacente.
(a) Dibuje el diagrama cinemática de este mecanismo.
(b) ¿Se trata de un eslabonamiento generador de movimiento, de trayectoria o de función?
1.10. Conforme el vapor entra a una trampa de vapor, éste se condensa y se permite que fluya hacia afue-
ra de la trampa en forma líquida. El eslabonamiento en la figura P1.9 ha sido propuesto! como unaválvula de control de retroalimentación para la trampa de vapor. El flotador detecta el nivel del
condensado mientras que el eslabonamiento ajusta la válvula de salida.
(a) Dibuje el diagrama cinemática, fuera de escala, para este eslabonamiento.
(b) ¿Es un generador de función, de trayectoria o de movimiento?
(e) ¿Puede usted diseñar otro eslabonamiento simple para esta tarea?
t Por G. Fichtinger y R. Westby [56, 66].§ Por M.L. Pierce, estudiante, University ofMinnesota.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 61/111
Problemas 45
Descarrilador
Resorte
Trayectoria _{ "I II I
Catarina I
grande
Cadena ~J
\ ,\
Acoplador
función?
fluya hacia afue-! como una
cta el nivel del
Salida del
condensado
- -Cable de
control Figura PL8
iendo el em-
a durante lasena de una cata-entándola sobre
nas) y la mani-
sobre la cadenaa operación dels eficiente debi-
Entrada
del vapor
Figura P1.9
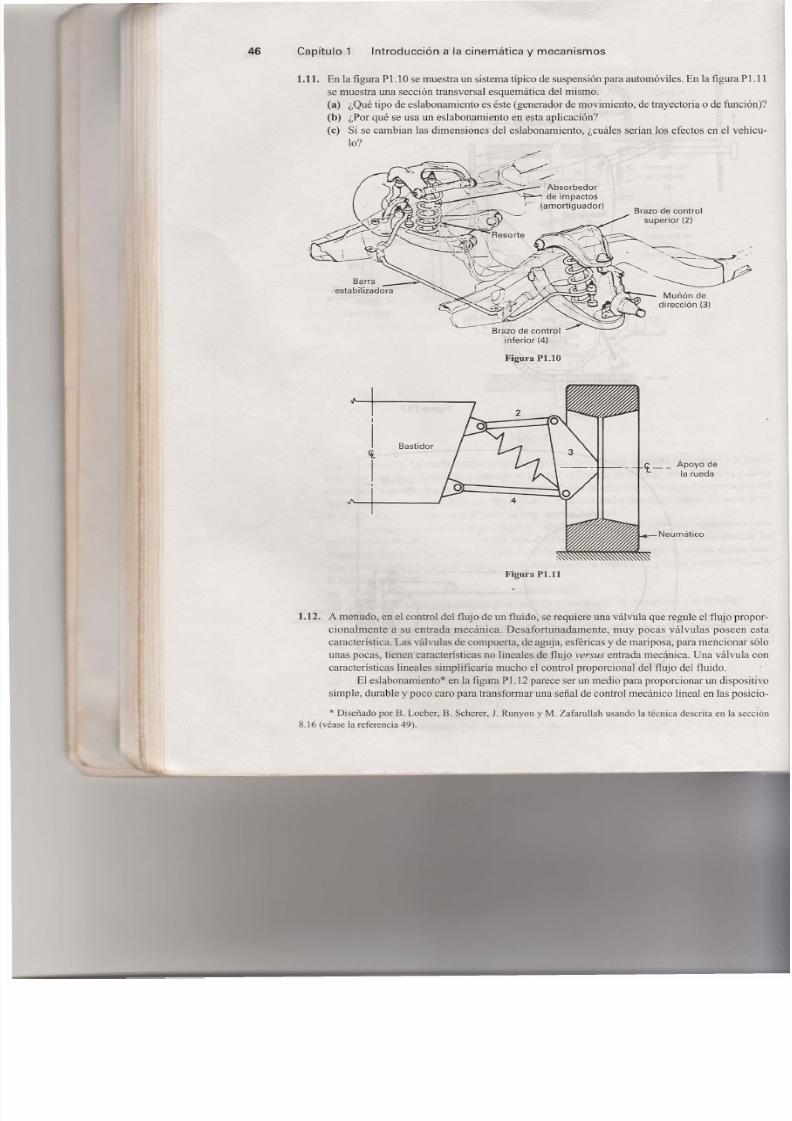
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 62/111
46 Capítulo 1 Introducción a la cinemática y mecanismos
1.11. En la figura Pl.I0 se muestra un sistema típico de suspensión para automóviles. En la figura Pl.ll
se muestra una sección transversal esquemática del mismo.(a) ¿Qué tipo de eslabonamiento es éste (generador de movimiento, de trayectoria o de función)?
(b) ¿Por qué se usa un eslabonamiento en esta aplicación?
(e) Si se cambian las dimensiones del eslabonamiento, ¿cuáles serían los efectos en el vehícu-lo?
Brazo de controlsuperior (2)
Barraestabilizadora
~Muñón dedirección (3)
Figura P1.10
Apoyo dela rueda
Neumático
Figura P1.11
1.12. A menudo, en el control del flujo de un fluido, se requiere una válvula que regule elflujo propor-
cionalmente a su entrada mecánica. Desafortunadamente, muy pocas válvulas poseen estacaracterística. Las válvulas de compuerta, de aguja, esféricas y de mariposa, para mencionar sólo
unas pocas, tienen características no lineales de flujo versus entrada mecánica. Una válvula con
características lineales simplificaría mucho el control proporcional del flujo del fluido.
El eslabonarniento* en la figura P 1.12 parece ser un medio para proporcionar un dispositivo
simple, durable y poco caro para transformar una señal de control mecánico lineal en las posicio-
* Diseñado por B. Loeber, B. Scherer, J. Runyon y M. Zafarullah usando la técnica descrita en la sección8.16 (véase la referencia 49).
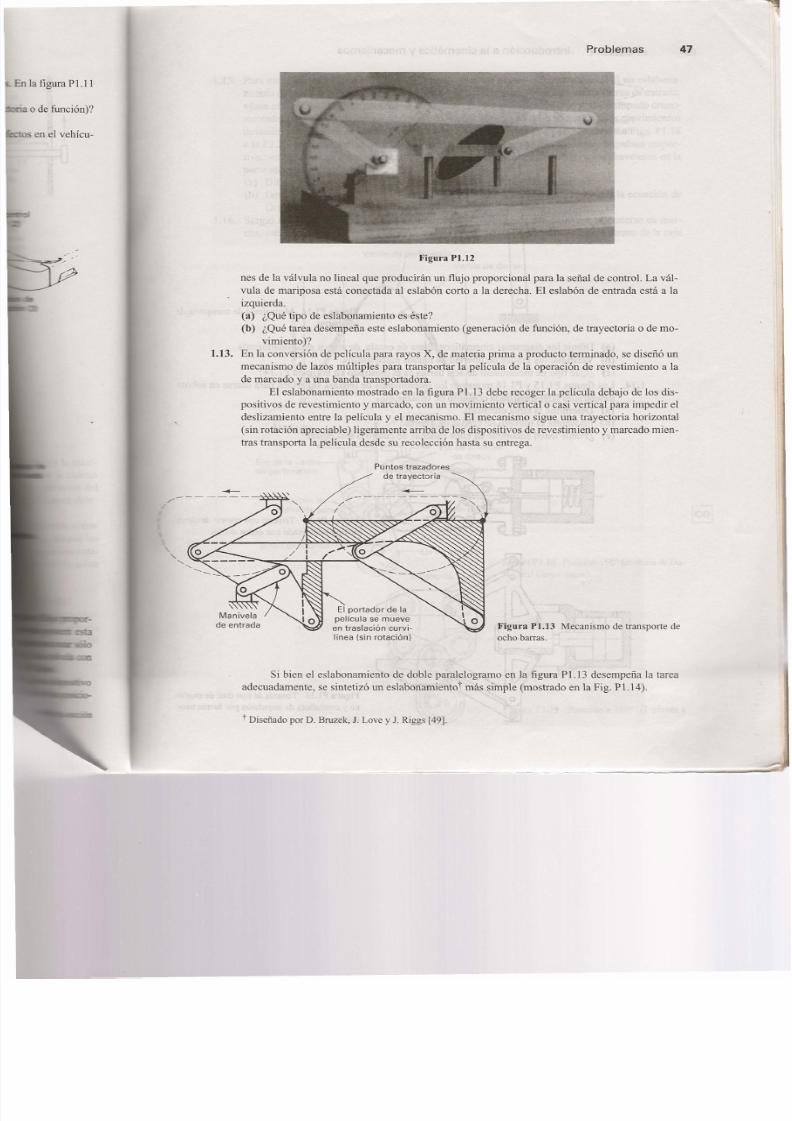
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 63/111
Problemas 47
n el vehícu-
figura PUl
de función)?
Figura PU2
nes de la válvula no lineal que producirán un flujo proporcional para la señal de control. La vál-
vula de mariposa está conectada al eslabón corto a la derecha. El eslabón de entrada está a laizquierda.
(a) ¿Qué tipo de eslabonamiento es éste?(b) ¿Qué tarea desempeña este eslabonamiento (generación de fu nci ón , de trayectoria o de mo-
vimiento )?
1.13. En la conversión de película para rayos X, de materia prima a producto terminado, se diseñó unmecanismo de lazos múltiples para transportar la película de la operación de revestimiento a la
de marcado ya una banda transportadora.El eslabonamiento mostrado en la figura P1.l3 debe recoger la película debajo de los dis-
positivos de revestimiento y marcado, con un movimiento vertical o casi vertical para impedir eldeslizamiento entre la película y el mecanismo. El mecanismo sigue una trayectoria horizontal
(sin rotación apreciable) ligeramente arriba de los dispositivos de revestimiento y marcado mien-
tras transporta la película desde su recolección hasta su entrega.
Puntos trazadores
de trayectoria
- - - -. • . . ...---------- •• • • • • . •
/ ----1'/ "-I /,,", Y/ \
El portador de la
película se mueve
en traslación curvi-
línea (sin rotación)
Figura Pl.13 Mecanismo de transporte deocho barras.
Si bien el eslabonamiento de doble paralelogramo en la figura P1.l3 desempeña la tareaadecuadamente, se sintetizó un eslabonamiento! más simple (mostrado en la Fig. P1.l4).
t Diseñado por D. Bruzek, J. Love y J. Riggs [49].

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 64/111
48 Capítulo 1 Introducción a la cinemática y mecanismos
Figura P1.16 Tenazas de tipo dual de engra-
ney
cremallera de impulsión por fuente neu-mática.
- - - --------
"~-----
Punto trazadorde trayectoria
~Figura P1.14 Mecanismo de transporte de
seis barras.
o
(a) Dibuje los cliagramas cinemáticos, fuera de escala, de ambos eslabonamientos.
(b) Verifique los grados de libertad de ambos mecanismos.(e) ¿Qué tipo de mecanismo de seis barras es el mostrado en la figura P1.l4?
1.14. Las figuras P1.l5 y P1.16 muestran los mecanismos de tenazas sugeridos para usarse en robots
industriales [29]. Para cada conjunto de tenazas,
(a) Determine la tarea efectuada.(b) Encuentre el número de grados de libertad.
(e) ¿Puede usted encontrar en ellos cadenas de cuatro o seis barras?
Figura P1.15 Tenazas con resorte de carga
de tipo eslabonado con dedos dobles.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 65/111
de
bots
e carga
de engra-te neu-
Problemas 49
1.15. Para estampar caracteres en tarjetas de crédito y de otro tipo, se ha diseñado [10] un eslabona-miento de lazos múltiples que exhibe una alta ventaja mecánica (fuerza de salida/fuerza de entrada;
véase el capítulo 3). Se requieren por separado superficies de perforación y de estampado crono-
metradas para que la tarjeta no se desplace durante el proceso de estampado. (Los movimientos
deseados se muestran en la Fig. P1.17.) El eslabonamiento de estampado (véanse las Figs. PU8a la PI.20) hace uso de un arreglo mediador con el cual dos varillas oscilantes impulsan respec-
tivamente punzones y dados, siempre que los mediadores sean insertados en los chaveteros en laparte superior de las varillas.
(a) Dibuje el diagrama cinemático, fuera de escala, de este eslabonamiento.(b) Determine los grados de l ibertad de este eslabonamiento por intuición y con la ecuación de
Gruebler.
1.16. Surgió la idea de diseñar y construir un mecanismo dentro de una caja que, al ponerse en mar-
cha, sacaría un dedo fuera de ella, se detendría él mismo y el dedo volveria hacia dentro de la caja
Varilla de perforación
Varilla de dados
Bc:
' "E' "N' "a.<J )
Q)
o
Figura P1.170 1800 3600
Mediador
sujeción
Eslabón impulsor
Pasador A
l :J \\\ Eje de entrada
Excéntrico
Figura PI.18 Posicióna 900 (cortesía de Da-
ta Card Corporation).
G
Figura P1.19 Posición a 1800 (G,
pivote atierra).
§]
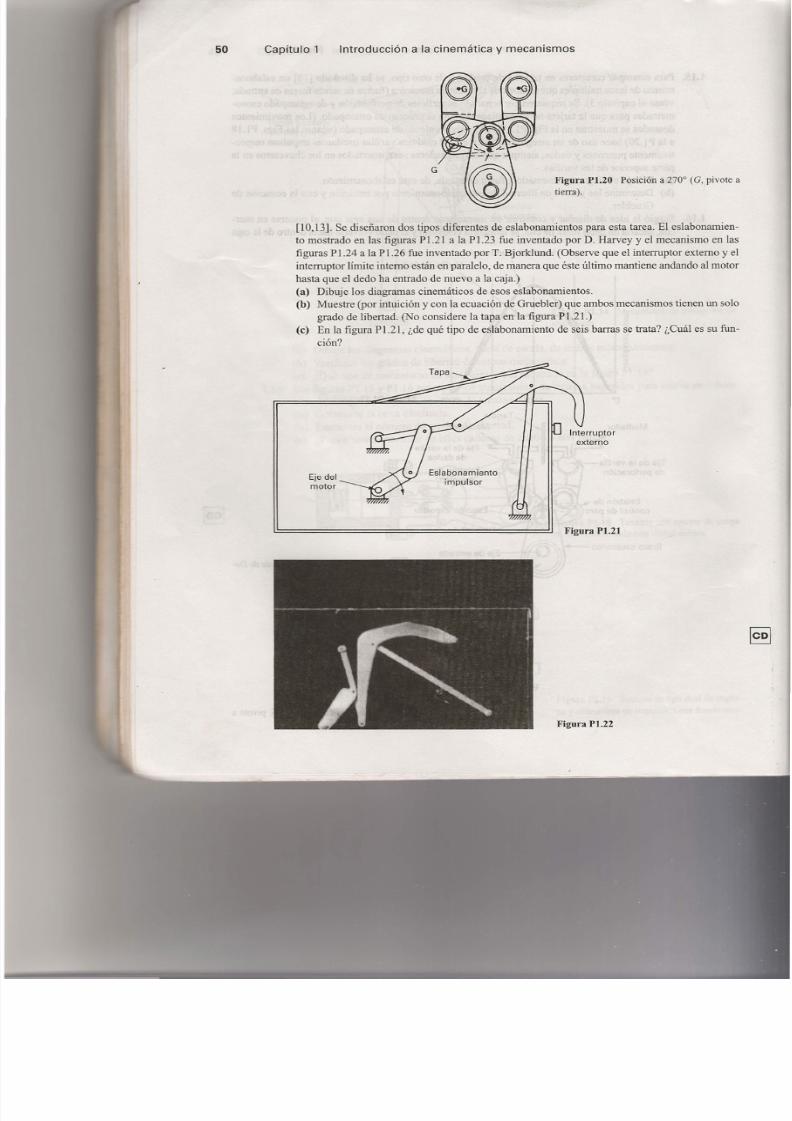
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 66/111
50 Capítulo 1 Introducción a la cinemática y mecanismos
G
Figura P1.20 Posición a 2700 (G, pivote atierra).
[10,13]. Se diseñaron dos tipos diferentes de eslabonamientos para esta tarea. El eslabonamien-to mostrado en las figuras P1.21 a la P1.23 fue inventado por D. Harvey y el mecanismo en lasfiguras P1.24 a la P 1.26 fue inventado por T. Bjorklund. (Observe que el interruptor externo y elinterruptor l ímite interno están en paralelo, de manera que éste último mantiene andando al motor
hasta que el dedo ha entrado de nuevo a la caja.)(a) Dibuje los diagramas cinemáticos de esos eslabonamientos.(b) Muestre (por intuición y con la ecuación de Gruebler) que ambos mecanismos tienen un solo
grado de libertad. (No considere la tapa en la figura P1.21.)(e) En la figura P1.21, ¿de qué tipo de eslabonamiento de seis barras se trata? ¿Cuál es su fun-
ción?
Figura P1.21
Eje del
motor
Eslabonamiento
impulsor
§]
Figura P1.22
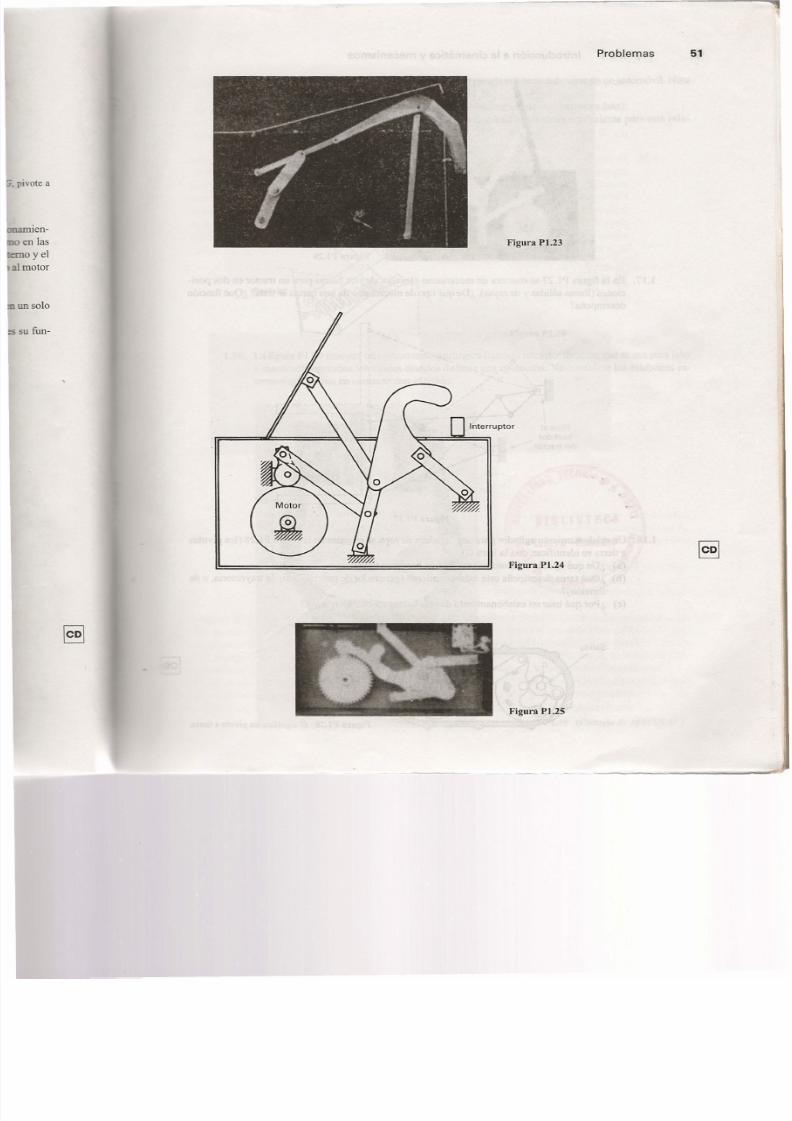
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 67/111
Problemas 51
Figura P1.23
§]Figura P1.24
§J
Figura P1.25
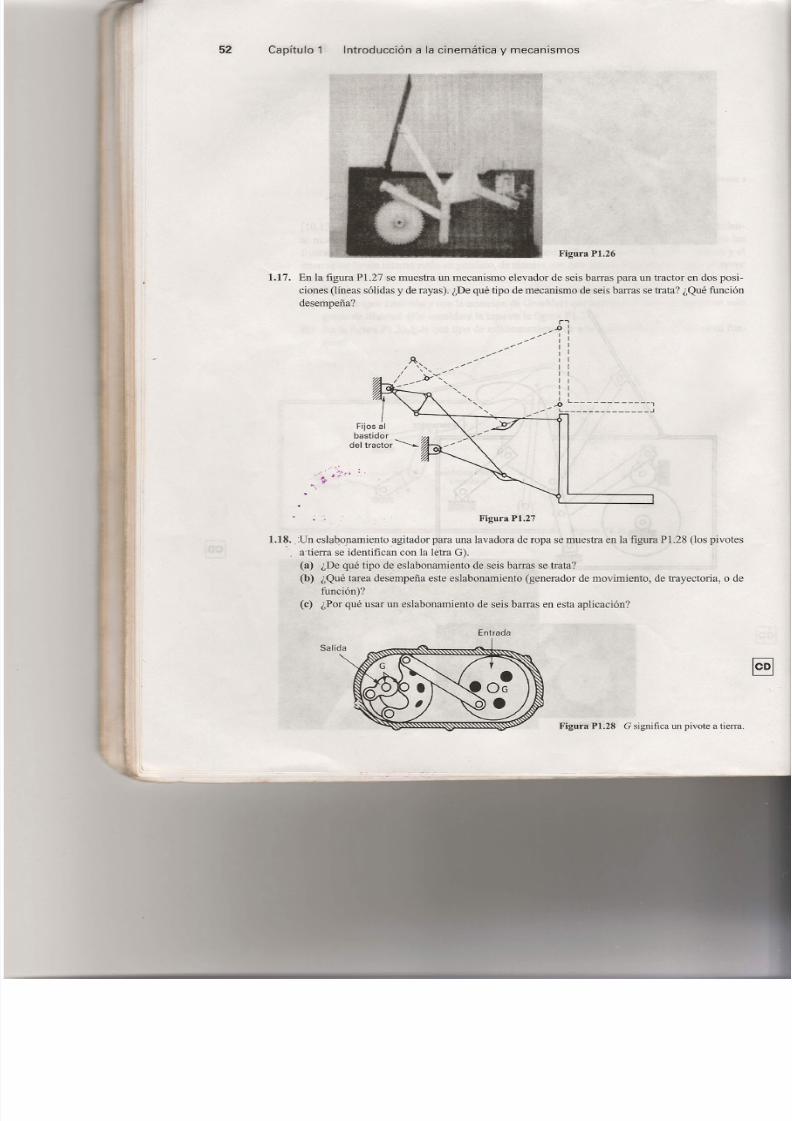
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 68/111
52 Capítulo 1 Introducción a la cinemática y mecanismos
Figura P1.26
1.17. En la figura P1.27 se muestra un mecanismo elevador de seis barras para un tractor en dos posi-ciones (líneas sólidas y de rayas). ¿De qué tipo de mecanismo de seis barras se trata? ¿Qué funcióndesempeña?
A -/ <;
/1 \........
~""""
"
r
•. .. --~~~~~~ :
......... I
-> I
»> I
I
I
II
I.o ------------,
_ - L ~
lijos al
bastidor %del tractor ------.... /
~ #'; ..•~. .
Figura P1.27
1.18 .. .Un eslabonamiento agitador para una lavadora de ropa se muestra en la figura P 1.28 (los pivotes-. atierra se identificán con la letra G).
(a) ¿De qué tipo de. eslabonamiento de seis barras se trata?
(b) ¿Qué tarea desempeña este eslabonamiento (generador de movimiento, de trayectoria, o defunción)?
(e) ¿Por qué usar un eslabonamiento de seis barras en esta aplicación?
Entrada
Salida
§]
Figura Pl.28 G significa un pivote a tierra.
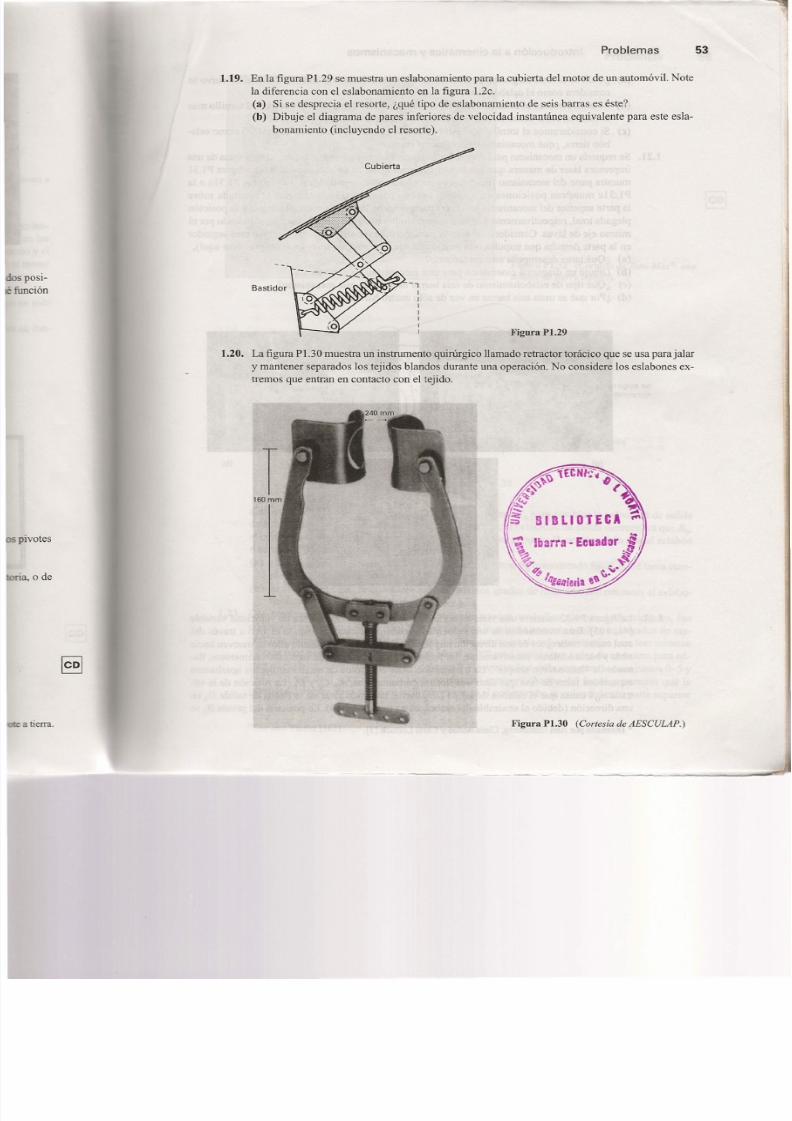
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 69/111
Problemas 53
1.19. En la figura P1.29 se muestra un eslabonamiento para la cubierta del motor de un automóvil. Note
la diferencia con el eslabonamiento en la figura l.2c.(a) Si se desprecia el resorte, ¿qué tipo de eslabonamiento de seis barras es éste?
(b) Dibuje el diagrama de pares inferiores de velocidad instantánea equivalente para este esla-bonamiento (incluyendo el resorte) .
i- _" 'IK\.~..l._ ,~ ~ I
I
I
II
I
I Figura P1.29
1.20. La figura Pl.30 muestra un instrumento quirúrgico llamado retractor torácico que se usa para jalary mantener separados los tejidos blandos durante una operación. No considere los eslabones ex-tremos que entran en contacto con el tejido.
§]
rra. Figura P1.30 (Cortesía de AESCULAP.)

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 70/111
Capítulo 1 Introducción a la cinemática y mecanismos4
(a) ¿Cuál es el total de grados de libertad de este mecanismo si el miembro izquierdo curvo seconsidera como el eslabón tierra?
(b) Si consideramos el eslabón curvo en el lado izquierdo como eslabón tierra y el tomillo masel eslabón corto como un solo eslabón, ¿qué mecanismo de seis barras resulta?
(e) Si consideramos el tomillo y el eslabón corto (que forma una T con el tomillo) como esla-bón tierra, ¿qué mecanismo de seis barras resulta?
1.21. Se requería un mecanismo para doblar cartas automáticamente, en tres partes, al salir éstas de unaimpresora láser de manera que quedaran listas para meterlas en sobres postales. La figura P1.31muestra parte del mecanismo final" que es impulsado por un eje de levas. Las figuras P1.31a a laPI.3Ic muestran posiciones en donde la hoja de papel ha sido justamente alimentada sobrela parte superíor del mecanismo, la tercera parte derecha levantada sobre el pliegue y la posición
plegada total, respectivamente. Un mecanismo similar pliega la parte izquierda, impulsado por elmismo eje de levas. Considerando sólo la parte derecha (observe que hay también otro seguidor
en la parte derecha que impulsa otra función de este mecanismo, que puede despreciarse aquí),(a) ¿Qué tarea desempeña este mecanismo?(b) Dibuje un diagrama cinemático para este mecanismo fuera de escala.(e) ¿Qué tipo de eslabonamiento de seis barras es parte de este mecanismo?(d) ¿Por qué se usan seis barras en vez de sólo cuatro barras?
Figura P1.31
1.22. La figura P1.32 muestra una vista en corte de una transmisión Zero-Max de velocidad variable[41,103]. Esta transmisión da una velocidad variable continua cambiando el arco a través delcual cuatro embragues de una dirección impulsan la flecha de salida cuando ellos se mueven haciaatrás y hacia adelante sucesivamente. La figura PI.33 muestra uno de esos eslabonamientos, lla-mado de "laminación simple". La transmisión tiene conjuntos de eslabonamientos igualmente
espaciados fuera de fase que usan tres flechas comunes fijas, Ao , eoy Do' La rotación de la en-trada AoA causa que el eslabón de salida DD o oscile, haciendo girar así la flecha de salida Do en
una dirección (debido al ensamble del embrague en una dirección). La posición del pivote Eo se
* Diseñado por Ann Guttisberg, Chris Anton y Chris Lentsch [3].
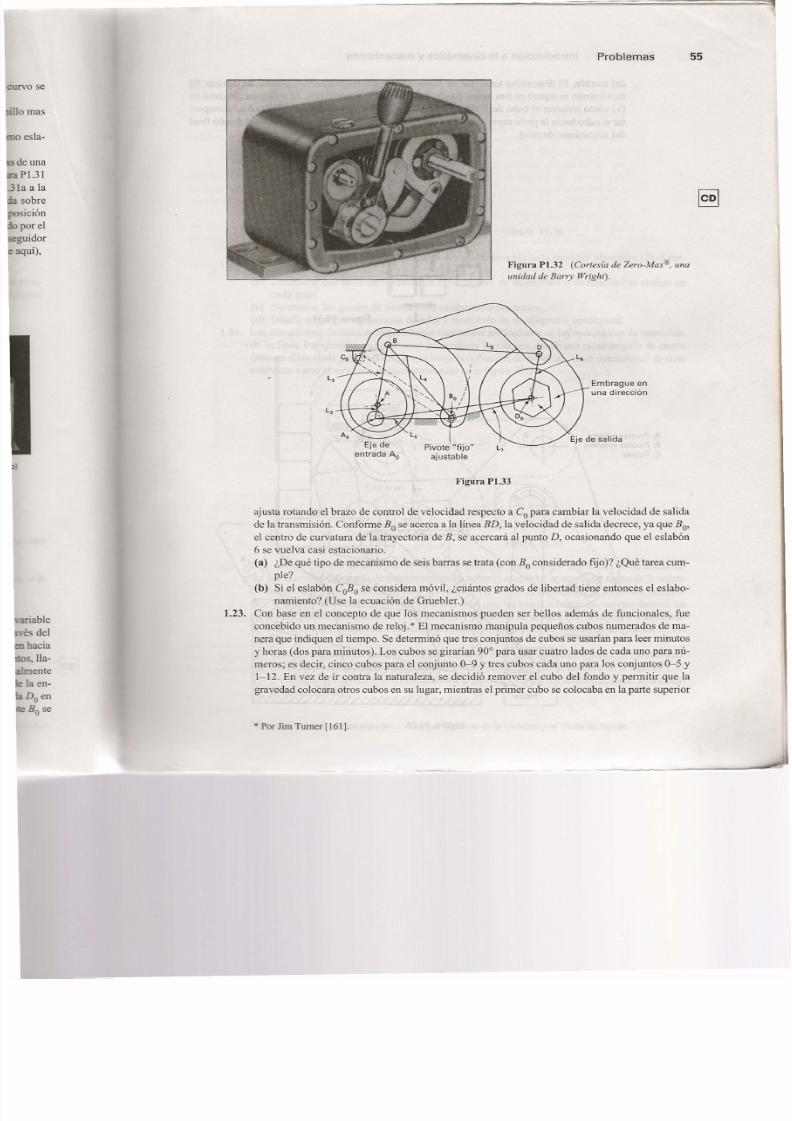
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 71/111
Problemas 55
Figura P1.32 (Cortesía de Zero-Max®, una
unidad de Barry Wright).
se
L3Embrague en
una dirección
L2~
Pivote "fijo"
ajustable
Figura P1.33
bledel
cia
lla-
en-
ense
ajusta rotando el brazo de control de velocidad respecto a Co para cambiar la velocidad de salida
de la transmisión. Conforme Ba se acerca a la línea BD , la velocidad de salida decrece, ya que Ba ,
el centro de curvatura de la trayectoria de B, se acercará al punto D, ocasionando que el eslabón6 se vuelva casi estacionario.
(a) ¿De qué tipo de mecanismo de seis barras se trata (con Bo considerado fijo)? ¿Qué tarea cum-ple?
(b) Si el eslabón CoBo se considera móvil, ¿cuántos grados de libertad tiene entonces el eslabo-namiento? (Use la ecuación de Gruebler.)
1.23. Con base en el concepto de que los mecanismos pueden ser bellos además de funcionales, fueconcebido un mecanismo de reloj. * El mecanismo manipula pequeños cubos numerados de ma-nera que indiquen el tiempo. Se determinó que tres conjuntos de cubos se usarían para leer minutos
y horas (dos para minutos). Los cubos se girarían 900 para usar cuatro lados de cada uno para nú-meros; es decir, cinco cubos para el conjunto 0-9 y tres cubos cada uno para los conjuntos 0-5 y1-12. En vez de ir contra la naturaleza, se decidió remover el cubo del fondo y permitir que la
gravedad colocara otros cubos en su lugar, mientras el primer cubo se colocaba en la parte superior
* Por Jim Turner [161].
§]
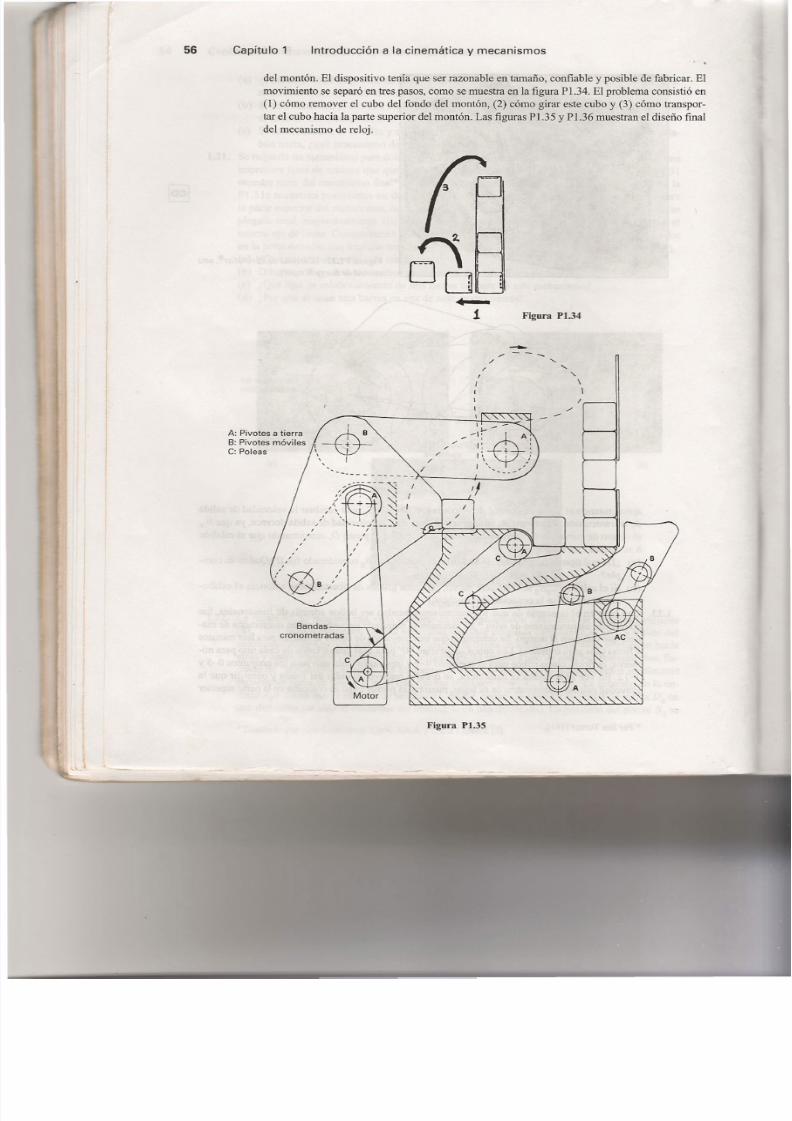
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 72/111
Capítulo 16 Introducción a la cinemática y mecanismos ..del montón. El dispositivo tenía que ser razonable en tamaño, confiable y posible de fabricar. Elmovimiento se separó en tres pasos, como se muestra en la figura P 1.34. El problema consistió en(1) cómo remover el cubo del fondo del montón, (2) cómo girar este cubo y (3) cómo transpor-
tar el cubo hacia la parte superior del montón. Las figuras Pl.35 y Pl.36 muestran el diseño fmaldel mecanismo de reloj.
2 .
0('\.01011 Figura P134
- -<,
/
I
I
<,
- ,\
\
./
A: Pivotes a tierra
B: Pivotes móviles
C: Poleas\,'4
; ~ m / - - - ; - - ~ -/\ it¡]t) ~
,,/ \ .. I I ~
-- •• J _ o : \ :/
,,,/,
,}
08//
~\¿)L /,
Motor
Figura PL35
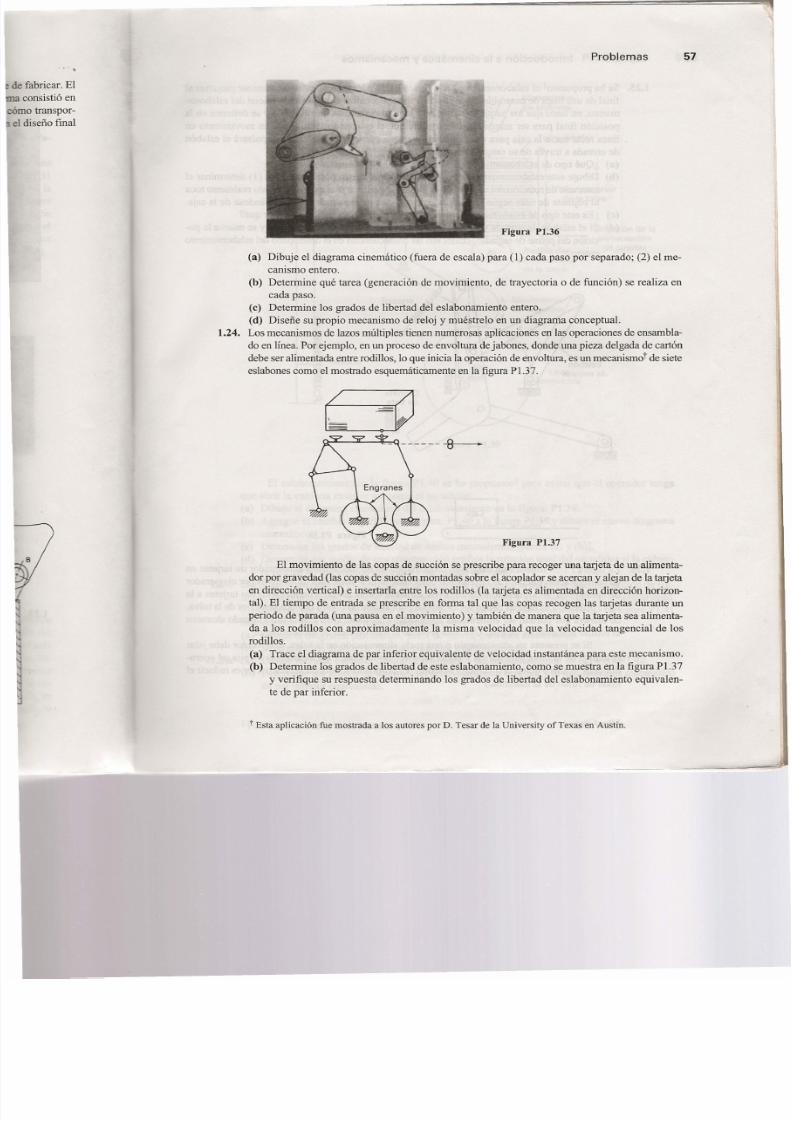
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 73/111
Problemas 57., .
icar. El
sistió enanspor-ño [mal
Figura P1.36
(a) Dibuje el diagrama cinemática (fuera de escala) para (1) cada paso por separado; (2) el me-canismo entero.
(b) Determine qué tarea (generación de movimiento, de trayectoria o de función) se realiza en
cada paso.(e) Determine los grados de libertad del eslabonamiento entero.(d) Diseñe su propio mecanismo de reloj y muéstrelo en un diagrama conceptual.
1.24. Los mecanismos de lazos múltiples tienen numerosas aplicaciones en las operaciones de ensambla-
do en línea. Por ejemplo, en un proceso de envoltura de jabones, donde una pieza delgada de cartón
debe ser alimentada entre rodillos, lo que inicia la operación de envoltura, es un mecanismol de sieteeslabones como el mostrado esquemáticamente en la figura P1.37.
é ~B
Figura P1.37
El movimiento de las copas de succión se prescribe para recoger una tarjeta de un alimenta-
dor por gravedad (las copas de succión montadas sobre el acoplador se acercan y alejan de la tarjetaen dirección vertical) e insertarla entre los rodillos (la tarjeta es alimentada en dirección horizon-
tal). El tiempo de entrada se prescribe en forma tal que las copas recogen las tarjetas durante unperiodo de parada (una pausa en el movimiento) y también de manera que la tarjeta sea alimenta-
da a los rodillos con aproximadamente la misma velocidad que la velocidad tangencial de losrodillos.
(a) Trace el diagrama de par inferior equivalente de velocidad instantánea para este mecanismo.(b) Determine los grados de libertad de este eslabonamiento, como se muestra en la figura P1.37
y verifique su respuesta determinando los grados de libertad del eslabonamiento equivalen-te de par inferior.
t Esta aplicación fue mostrada a los autores por D. Tesar de la University ofTexas en Austin.
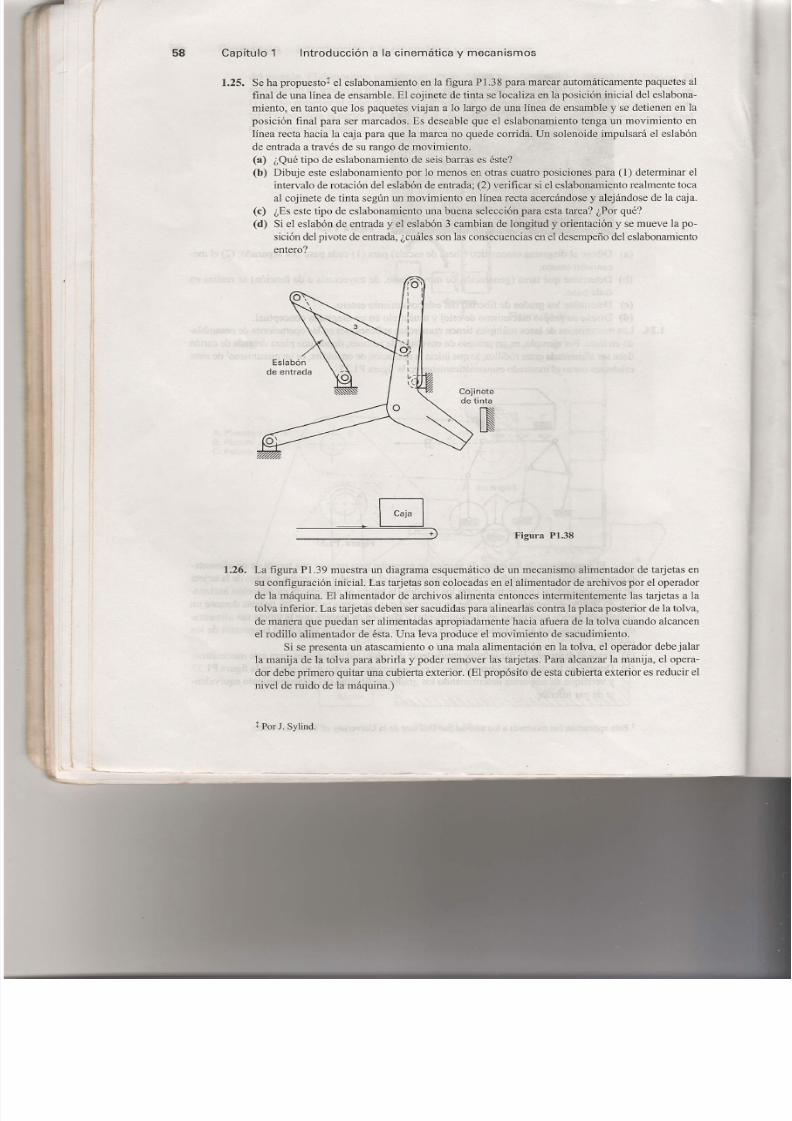
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 74/111
1.25. Se ha propuesto- el eslabonamiento en la figura PL38 para marcar automáticamente paquetes alfinal de una línea de ensamble. El cojinete de tínta se localiza en la posición inicial del eslabona-miento, en tanto que los paquetes viajan a lo largo de una línea de ensamble y se detienen en la
posición final para ser marcados. Es deseable que el eslabonamiento tenga un movimiento enlínea recta hacia la caja para que la marca no quede corrida. Un solenoide impulsará el eslabón
de entrada a través de su rango de movimiento.(a) ¿Qué tipo de eslabonamiento de seis barras es éste?
(b) Dibuje este eslabonamiento por lo menos en otras cuatro posiciones para (1) determinar elíntervalo de rotación del eslabón de entrada; (2) verificar si el eslabonamiento realmente tocaal cojínete de tinta según un movimiento en línea recta acercándose y alejándose de la caja.
(e) ¿Es este tipo de eslabonamiento una buena selección para esta tarea? ¿Por qué?
(d) Si el eslabón de entrada y el eslabón 3 cambian de longitud y orientación y se mueve la po-
sición del pivote de entrada, ¿cuáles son las consecuencias en el desempeño del eslabonamiento
entero?
Capítulo 1 Introducción a la cinemática y mecanismos8
[)!f < Cojinete
de tinta
=====!:
B+ ) Figura P1.38
1.26. La figura PL39 muestra un diagrama esquemático de un mecanismo alimentador de tarjetas ensu configuración inicial. Las tarjetas son colocadas en el alimentador de archivos por el operador
de la máquina. El alimentador de archivos alimenta entonces intermitentemente las tarjetas a latolva inferior. Las tarjetas deben ser sacudidas para alinearlas contra la placa posterior de la tolva,
de manera que puedan ser alimentadas apropiadamente hacia afuera de la tolva cuando alcancenel rodillo alimentador de ésta. Una leva produce el movimiento de sacudimiento.
Si se presenta un atascamiento o una mala alimentación en la tolva, el operador debe jalarla manija de la tolva para abrirla y poder remover las tarjetas. Para alcanzar la manija, el opera-
dor debe primero quitar una cubierta exterior. (El propósito de esta cubierta exterior es reducir elnivel de ruido de la máquina.)
t Por J. Sylind.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 75/111
El eslabonamiento en la figura P1.40 se ha propuestos para evitar que el operador tengaque abrir la cubierta exterior así como el sacudidor.
(a) Dibuje el diagrama cinemática del eslabonamiento en la figura. P1.39.
(b) Agregue el cambio sugerido en la figura. P1.40 a la figura P1.39 y dibuje el nuevo diagramacinemático.
(e) Determine los grados de libertad de ambos mecanismos [partes (a) y (b)].
(d) Determine por medio de una construcción gráfica la rotación total del sacudidor si la cubier-
ta se gira 90° en sentido contrario a las agujas del reloj.
1.27. Las grúas y aparatos de excavación de doble pluma se usan en la industria de construcción de edi-
ficios. Su popularidad se debe a su versatilidad, movilidad y alta capacidad de levantamiento .Típicamente, esta clase de equipo se activa por medio de cilindros hidráulicos. La figura P1.41
muestra una grúa típica de pluma articulada [149].
(a) Dibuje el diagrama cinemática, fuera de escala, para este mecanismo.(b) Determine los grados de libertad para este eslabonamiento.
1.28. (a) Dibuje fuera de escala el diagrama cinemática del eslabonamiento en la figura Pl.42.
(b) Determine los grados de libertad del eslabonamiento original y el del diagrama cinemática
de par inferior equivalente.
etes al
slabona-en en laiento eneslabón
nar elnte tocae la caja.
e la po-miento
tarjetas en
operadortas a la
e la tolva,
alcancen
Cubierta
exterior
~Tope
~
Resorte
Problemas 59
~~v Alimentador
~ de archivos
Manija del
sacudidor - íolva inferior
Placa posterior
de latolva
Movimiento
del sacudidor
Dirección de la
alimentación
de tarjetaso ,
Rodillo de
alimentación
de la tolva
Movimiento
del seguidor
~Leva
excéntrica
Figura Pl.39
§ Por R.E. Baker de la IBM, Rochester, MN.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 76/111
60 Capítulo 1 Introducción a la cinemática y mecanismos
Sacudidor
(Salida)
oFigura P1.40
Cilindro de la
pluma articulada
Pluma
principal
Cilindro hidráulico
de doble acción(" Arriba" abre las
'~lv1.J.l. \ tenazas;." Abajo"
las cierra)
Figura P1.41
Figura P1.42
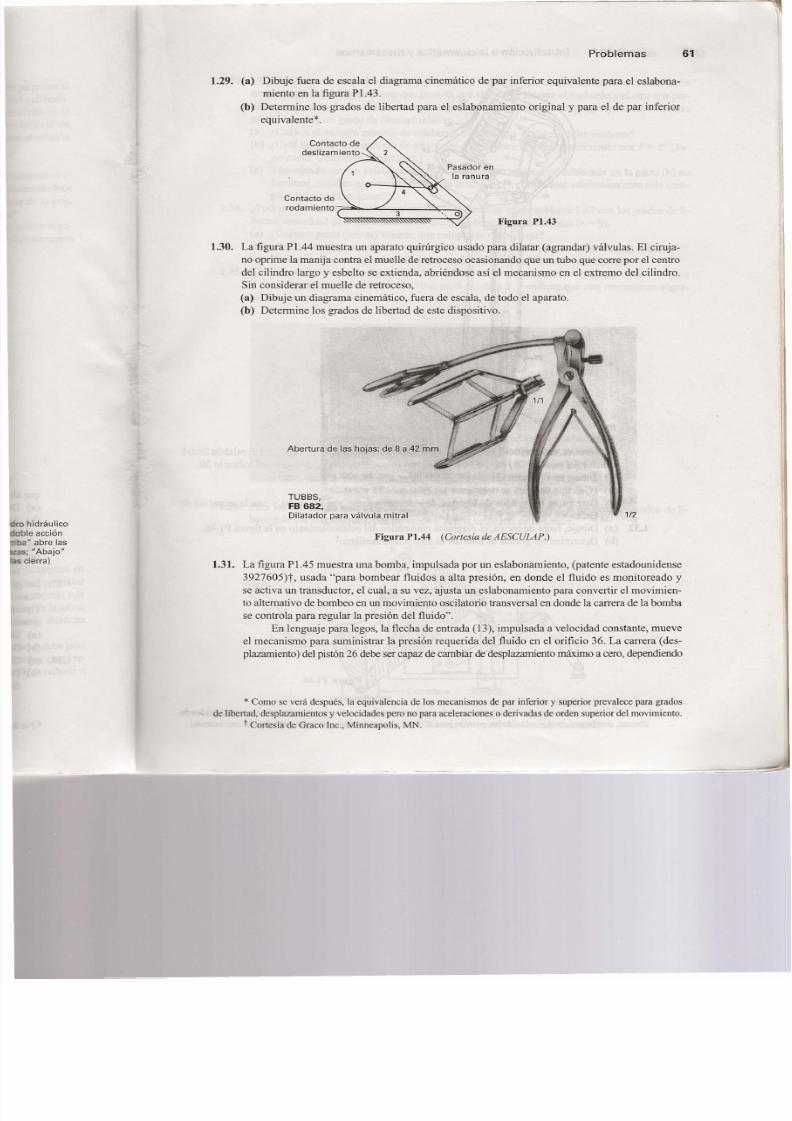
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 77/111
~
Problemas 61
1.29. (a) Dibuje fuera de escala el diagrama cinemático de par inferior equivalente para el eslabona-miento en la figura P1.43.
(b) Determine los grados de libertad para el eslabonamiento original y para el de par inferior
equivalente* .
Contacto de
rodamiento~ ..< _ '-"
Pasador en
la ranura
Figura P1.43
1.30. La figura P1.44 muestra un aparato quirúrgico usado para dilatar (agrandar) válvulas. El ciruja-
no oprime la manija contra el muelle de retroceso ocasionando que un tubo que corre por el centro
del cilindro largo y esbelto se extienda, abriéndose así el mecanismo en el extremo del cilindro.Sin considerar el muelle de retroceso,
(a) Dibuje un diagrama cinemático, fuera de escala, de todo el aparato.(b) Determine los grados de libertad de este dispositivo.
Abertura de las hojas: de 8 a 42 mm
TUBBS,FB 682,Dilatador para válvula mitral 1/2
Figura P1.44 (Cortesía de AESCULAP.)
1.31. La figura P 1.45 muestra una bomba, impulsada por un eslabonamiento, (patente estadounidense
3927605)t, usada "para bombear fluidos a alta presión, en donde el fluido es monitoreado yse activa un transductor, el cual, a su vez, ajusta un eslabonamiento para convertir el movimien-
to alternativo de bombeo en un movimiento oscilatorio transversal en donde la carrera de la bombase controla para regular la presión del fluido".
En lenguaje para legos, la flecha de entrada (13), impulsada a velocidad constante, mueveel mecanismo para suministrar la presión requerida del fluido en el orificio 36. La carrera (des-plazamiento) del pistón 26 debe ser capaz de cambiar de desplazamiento máximo a cero, dependiendo
* Como se verá después, la equivalencia de los mecanismos de par inferior y superior prevalece para grados
de libertad, desplazamientosy velocidades pero no para aceleraciones o derivadas deorden superior del movimiento.t Cortesía de Gracolnc., Minneapolis, MN.
- -
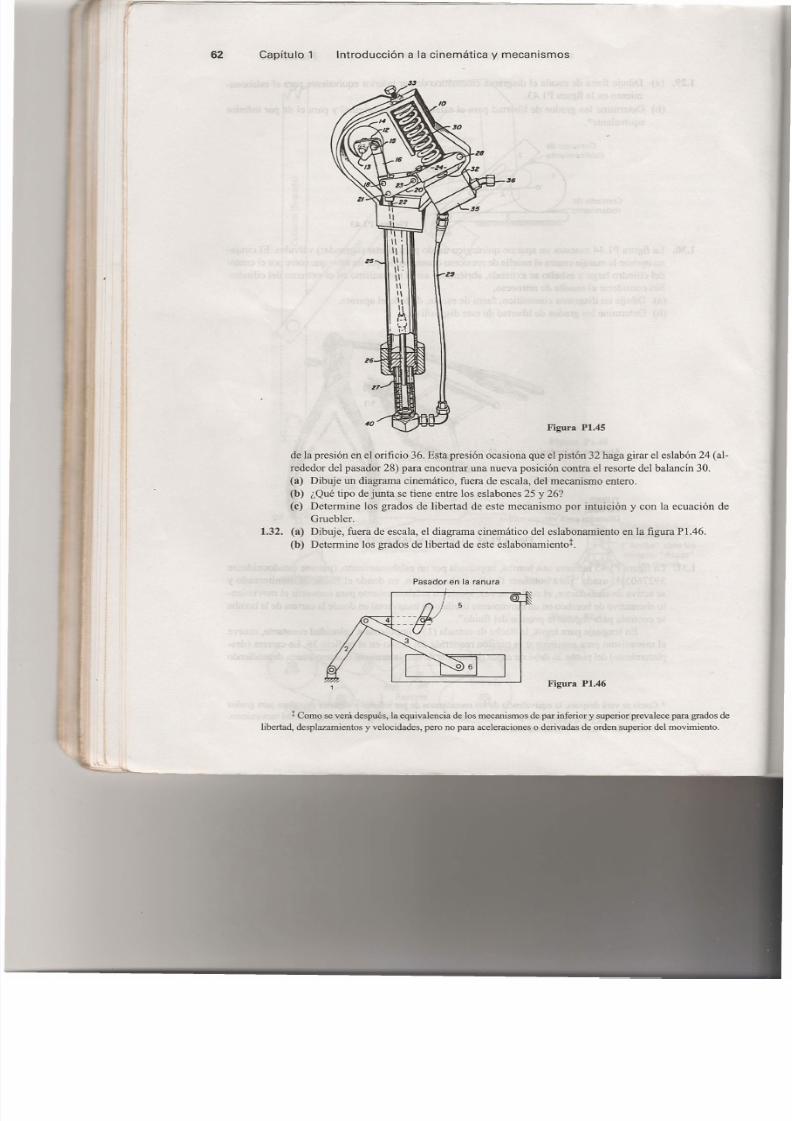
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 78/111
t
62 Capítulo 1 Introducción a la cinemática y mecanismos
~;'6
29
26
40 Figura P1.45
de la presión en el orificio 36. Esta presión ocasiona que el pistón 32 haga girar el eslabón 24 (al-
rededor del pasador 28) para encontrar una nueva posición contra el resorte del balancín 30.
(a) Dibuje un diagrama cinemático, fuera de escala, del mecanismo entero.(b) ¿Qué tipo de junta se tiene entre los eslabones 25 y 26?
(e) Determine los grados de libertad de este mecanismo por intuición y con la ecuación deGruebler.
1.32. (a) Dibuje, fuera de escala, el diagrama cinemático del eslabonamiento en la figura P1.46.
(b) Determine los grados de libertad de este eslabonamientot.
Pasador en la ranura
Figura P1.46
t Como se verá después, la equivalencia de los mecanismos de par inferior y superior prevalece para grados delibertad, desplazamientos y velocidades, pero no para aceleraciones o derivadas de orden superior del movimiento.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 79/111
Problemas 63
1.33. Va a diseñarse un cargador trasero para unirse a tractores tipo oruga.! El eslabonamiento debe
tener dos grados de libertad: uno que permita que el sistema levante el cucharón y el otro que per-
mita que el cucharón se vuelque mientras el primero se mantiene fijo. Suponga que todas las juntas
permitirán sólo un grado de libertad relativo.
(a) ¿Cuál es el número minirno de eslabones binarios que su diseño debe contener?
(b) ¿Cuál es el número minirno de eslabones que produciría un eslabonamiento con F= 2? [Su-
gerencia: Considere la parte (a).](e) Suponiendo que un eslabonamiento con el número mínimo de eslabones en la parte (b) no
funcione, ¿cuál es el número minirno de eslabones en el siguiente eslabonamiento más com-
plicado que sí funcionará?
1.34. ¿Podría construirse un eslabonamiento de 10 eslabones en el problema 1.33 con los grados de li-
bertad deseados? Si el eslabonamiento escogido tiene nueve eslabones (n =9),
(a) ¿Cuántos pares (juntas) tendrán que comprarse o diseñarse?
(b) ¿Cuál es el número máximo de elementos conectados que pueden tenerse en un eslabón?
(e) ¿Cuántos eslabones puede tener el número máximo de elementos conectados?1.35. El eslabonamiento en la figura P1.47 se diseñó como generador de función (y =-x + 2, para
1 $ ; x$ ; 4), usando los métodos descritos en el capítulo 8. Verifique que este mecanismo engra-
nado tiene un solo grado de libertad.
ón 24 (al-ín 30.
~{J~~ • . . .
t-
'I~
Figura P1.47
1.36. Para los eslabonamientos en las figuras P1.48 a la P1.57, determine el número de grados de li-
bertad de los mecanismos, por intuición y con la ecuación de Gruebler..46.
Figura P1.48
para grados deimiento. § Esta pregunta se usa por cortesía de Wm. Carson, University of Missouri, Columbia .
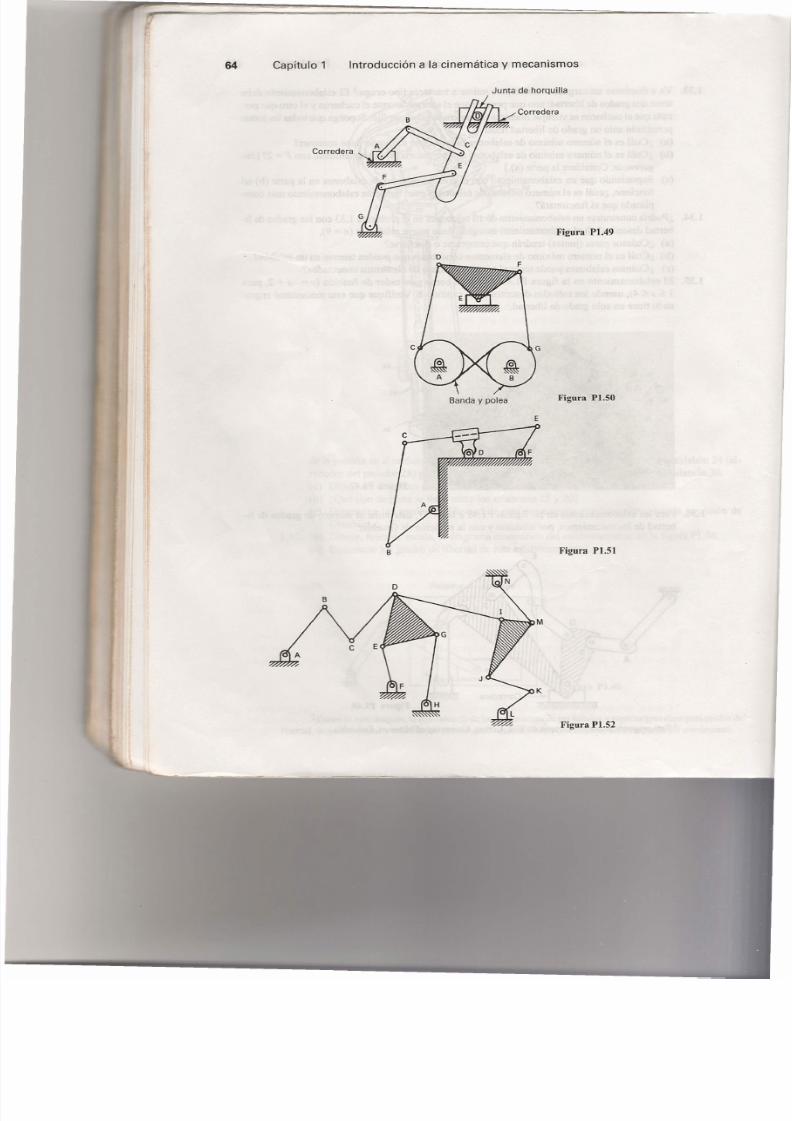
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 80/111
64 Capítulo 1 Introducción a la cinemática y mecanismos
Junta de horquilla
Corredera
Figura P1.49
Corredera
o
Banda y polea Figura P1.50
E
B Figura P1.51
~
DN
M
K
L
~ Figura P1.52
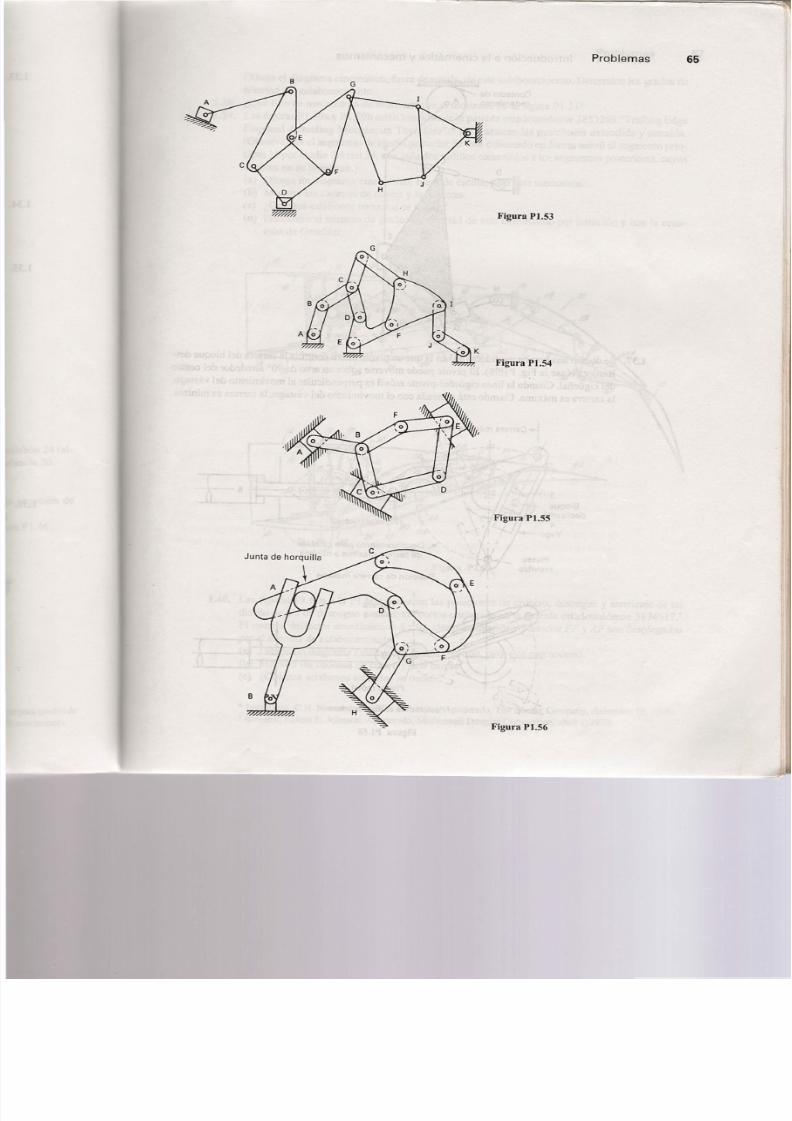
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 81/111
B
~
'o} K
~
Problemas 65
Figura P1.53
Figura Pl.54
Figura P1.55
Figura Pl.56
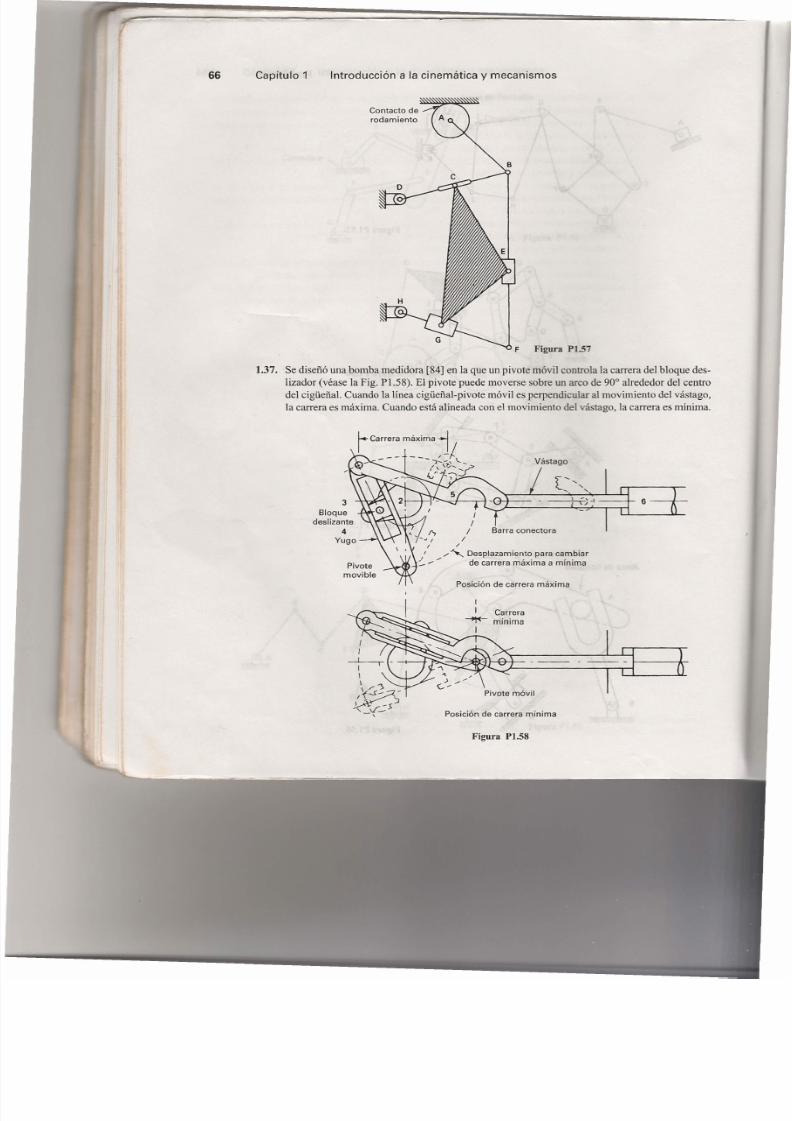
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 82/111
66 Capítulo 1 Introducción a la cinemática y mecanismos
Contacto de
rodamiento
F Figura Pl.S7
1.37. Se diseñó una bomba medidora [84] en la que un pivote móvil controla la carrera del bloque des-lizador (véase la Fig. P1.58). El pivote puede moverse sobre un arco de 90° alrededor del centrodel cigüeñal. Cuando la línea cigüeñal-pivote móvil es perpendicular al movimiento del vástago,
la carrera es máxima. Cuando está alíneada con el movimiento del vástago, la carrera es mínima.
r-,\ -'-1-~ .. • .
I
//
I
/
....."'- Desplazamiento para cambiar
de carrera máxima a mínimaPivote
movible
Posición de carrera máxima
I
I Carrera
~- mínima
I
Posición de carrera mínima
Figura Pl.S8

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 83/111
' 1
Problemas 67
Dibuje el diagrama cinemático, fuera de escala, de este eslabonamiento. Determine los grados de
libertad del eslabonamiento.1.38. ¿Qué tipo de mecanismo de seis barras es el mostrado en la figura P 1.51?
1.39. Las figuras Pl.59a y Pl.59b están tomadas de la patente estadounidense 3853289 "Trailing Edge
Flap and Actuating Mechanism Therefore". * Se muestran las posiciones extendida y retraída.(Observe que el segmento de alerón posterior 52 está conectado en forma móvil al segmento prin-
cipal34 por medio del riel 54, que guía dos rodillos conectados a los segmentos posteriores, cuyosdetalles no se muestran.)
(a) Dibuje un diagrama cinemático, fuera de escala, para este mecanismo.(b) Muestre las cadenas de cuatro y seis barras.
(e) ¿Cuántos eslabones temario s se tienen?
(d) Encuentre el número de grados de libertad de este mecanismo por intuición y con la ecua-
ción de Gruebler.
ue des-el centro
vástago,
mínima.
f-:"':-~':.:"'::'-'
(b)
)1 .
Figura P1.59
1.40. Las figuras P1.60a a la P1.60c muestran las posiciones de crucero, despegue y aterr izaje de un
diseño de ala de despegue y aterrizaje cortos contenido en la patente estadounidense 3874617.t
El sistema deflector aerodinámico S y los alerones anterior y posterior FF y AF son desplegados
por el sistema de eslabonamiento.(a) Dibuje un diagrama cinemático, fuera de escala, para este mecanismo.
(b) Muestre las cadenas de cuatro y seis barras.
(e) ¿Cuántos eslabones temario s se tienen?
* Inventores, C.H. Nevermann y Ellis 1. Roscow; Apoderado, The Boeing Company, dic iembre lO, 1974.
t Inventor, Robert E. Johnson; Apoderado, McDonnell Douglas Corporation, abril 1, 1975.
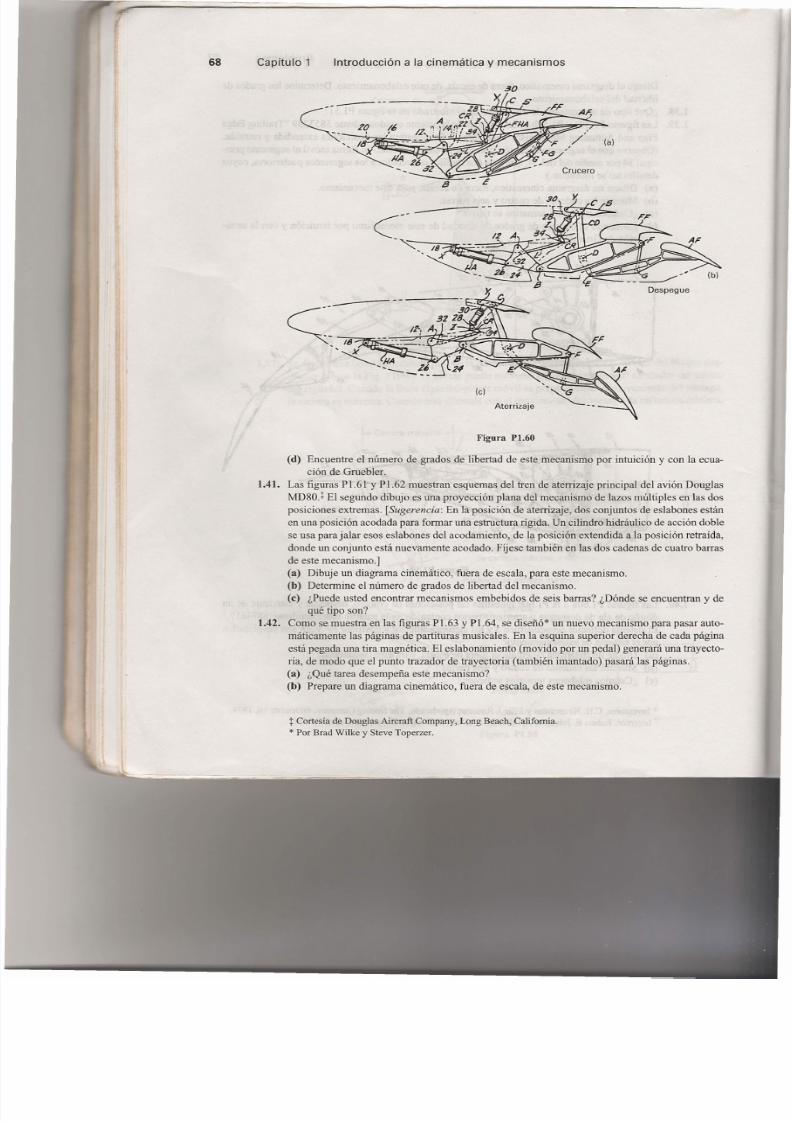
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 84/111
¿
Capítulo 1 Introducción a la cinemática y mecanismos8
(a)
8
--e ~---:-_0""', 18~.
"
~:---,~-~
.~~ :~ -.. _ ..A
(e )
Aterrizaje
Figura P1.60
(d) Encuentre el número de grados de libertad de este mecanismo por intuición y con la ecua-ción de Gruebler.
1.41. Las figuras PI.61 y Pl.62 muestran esquemas del tren de aterrizaje principal del avión Douglas
MD80.t El segundo dibujo es una proyección plana del mecanismo de lazos múltiples en las dosposiciones extremas. [Sugerencia: En la posición de aterrizaje, dos conjuntos de eslabones estánen una posición acodada para formar una estructura rígida. Un cilindro hidráulico de acción doble
se usa para jalar esos eslabones del acodamiento, de la posición extendida a la posición retraída,donde un conjunto está nuevamente acodado. Fíjese también en las dos cadenas de cuatro barras
de este mecanismo.]
(a) Dibuje un diagrama cinemático, fuera de escala, para este mecanismo.(b) Determine el número de grados de libertad del mecanismo.
(e) ¿Puede usted encontrar mecanismos embebidos de seis barras? ¿Dónde se encuentran y dequé tipo son?
1.42. Como se muestra en las figuras P1.63 y P1.64, se diseñó" un nuevo mecanismo para pasar auto-máticamente las páginas de partituras musicales. En la esquina superior derecha de cada página
está pegada una tira magnética. El eslabonamiento (movido por un pedal) generará una trayecto-ria, de modo que el punto trazador de trayectoria (también imantado) pasará las páginas.(a) ¿Qué tarea desempeña este mecanismo?
(b) Prepare un diagrama cinemático, fuera de escala, de este mecanismo.
t Cortesía de Douglas Aircraft Company, Long Beach, California.* Por Brad Wilke y Steve Toperzer.
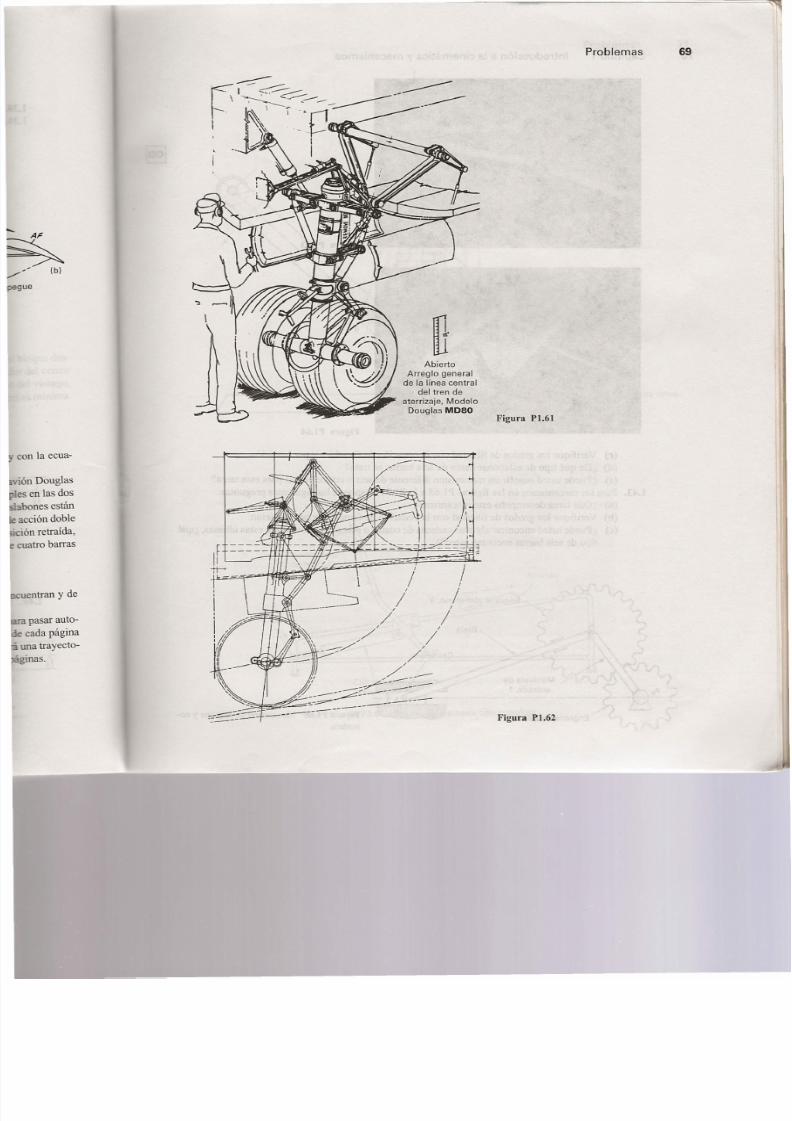
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 85/111
"roblemas 69 ,
Figura P1.62
E
(b)
Abierto
Arreglo general
de la linea central
del tren de
aterrizaje, Modelo
Douglas MD80
Figura P1.61
ar auto-
página
trayecto-
,
I
///
" ,/l' /// /--------
; 5 ~~~~" ~ - - - - - - ~: : - - - - - - - - - - -<:-=,;:-~-
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
1
///'
, /',~\\ ~/
-----:/
la ecua-
glas
las dos
están
n doble
retraída,o barras

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 86/111
, . , -- - -
Capítulo 1 Introducción a la cinemática y mecanismos0
Figura Pl.63
§]
Figura P1.64
(e) Verifique los grados de libertad con la ecuación de Gruebler y por intuición.(d) ¿De qué tipo de eslabonamiento de seis barras se trata?(e) ¿Puede usted sugerir un mecanismo diferente de seis o cuatro barras para esta tarea?
1.43. Para los mecanismos en las figuras P1.65 a la P1.71, responda las siguientes preguntas:(a) ¿Qué tarea desempeña este mecanismo?(b) Verifique los grados de libertad con la ecuación de Gruebler y por intuición.
(e) ¿Puede usted encontrar algunas cadenas de cuatro o seis eslabones? (para estas últimas, ¿quétipo de seis barras encontró usted?)
Engrane planetario, 3
Biela
Corredera
----_~
Figura P1.65 Mecanismo de engrane y co-
rredera.Engrane de salida, 4
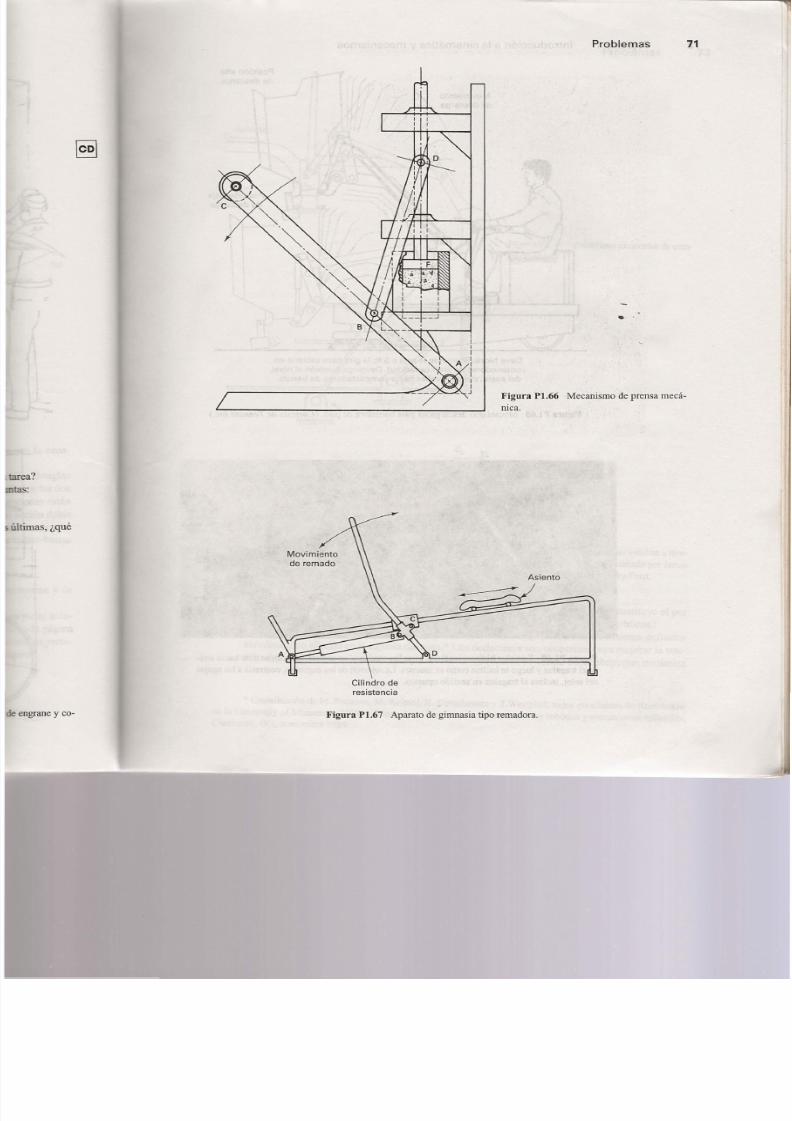
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 87/111
Problemas 71
§]
. •
Figura P1.66 Mecanismo de prensa mecá-
nica.
¿qué
Movimiento
de remado
Asiento
------=:::-
Cilindro de
resistencia
ne y co- Figura P1.67 Aparato de gimnasia tipo remadora.
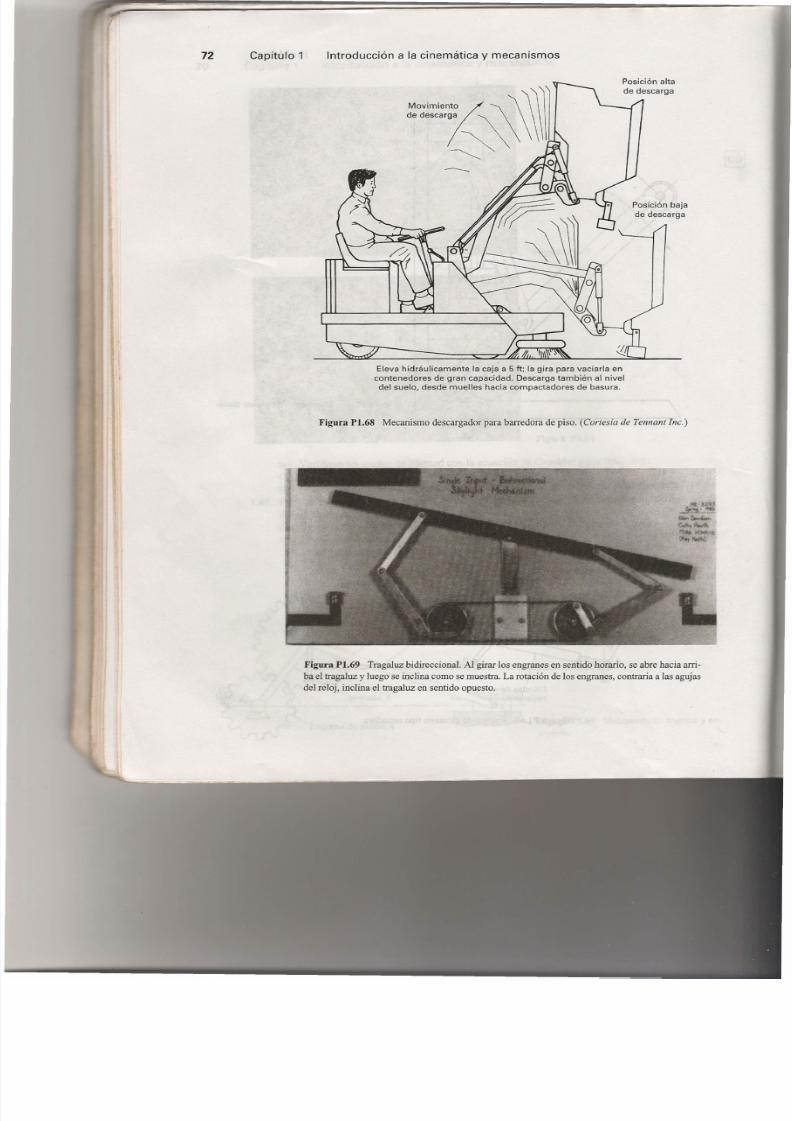
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 88/111
72 Capítulo 1 Introducción a la cinemática y mecanismos
Posición alta
de descarga
~o::~,;(~1~j!
Posición baja
de descarga
Eleva hidráulicamente la caja a 5 ft; la gira para vaciarla en
contenedores de gran capacidad. Descarga también al nivel
del suelo, desde muelles hacia compactadores de basura.
Figura P1.68 Mecanismo descargador para barredora de piso. (Cortesía de Tennant Inc.¡
Figura P1.69 Tragaluz bidireccional. Al girar los engranes en sentido horario, se abre hacia arri-
ba el tragaluz y luego se ineJina como se muestra. La rotación de los engranes, contraria a las agujas
del reloj, ineJina el tragaluz en sentido opuesto.
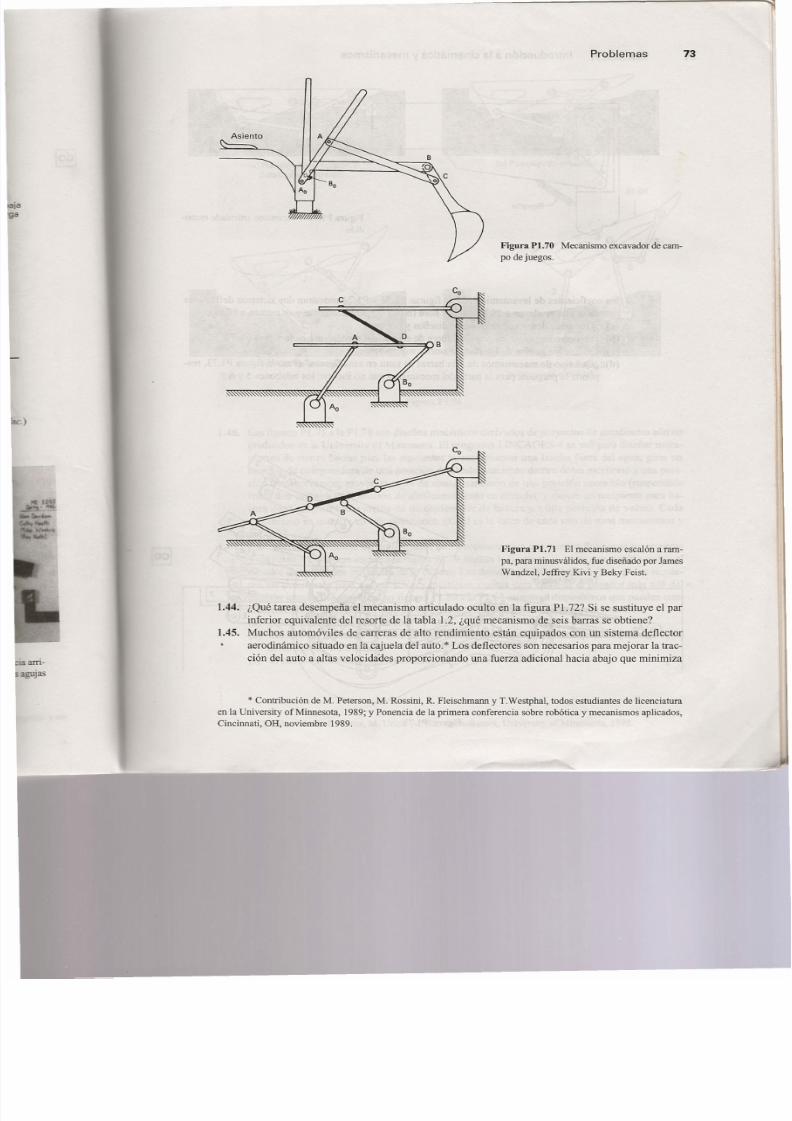
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 89/111
,Problemas 73
Asiento
Figura Pl. 70 Mecanismo excavador de cam-
po de juegos.
e
z ' ! ;Os
~
Figura Pl.71 El mecanismo escalón a ram-
pa, para minusválidos, fue diseñado por James
Wandzel, Jeffrey Kivi y Beky Feist.
1.44. ¿Qué tarea desempeña el mecanismo articulado oculto en la figura P1.72? Si se sustituye el parinferior equivalente del resorte de la tabla 1.2, ¿qué mecanismo de seis barras se obtiene?
1.45. Muchos automóviles de carreras de alto rendimiento están equipados con un sistema deflector
aerodinámico situado en la cajuela del auto. * Los deflectores son necesarios para mejorar la trac-ción del auto a altas velocidades proporcionando una fuerza adicional hacia abajo que minimiza
* Contribución de M. Peterson, M. Rossini, R. Fleischmann y T.Westphal, todos estudiantes de licenciatura
en la University ofMinnesota, 1989; y Ponencia de la primera conferencia sobre robótica y mecanismos aplicados,
Cincinnati, OH, noviembre 1989.
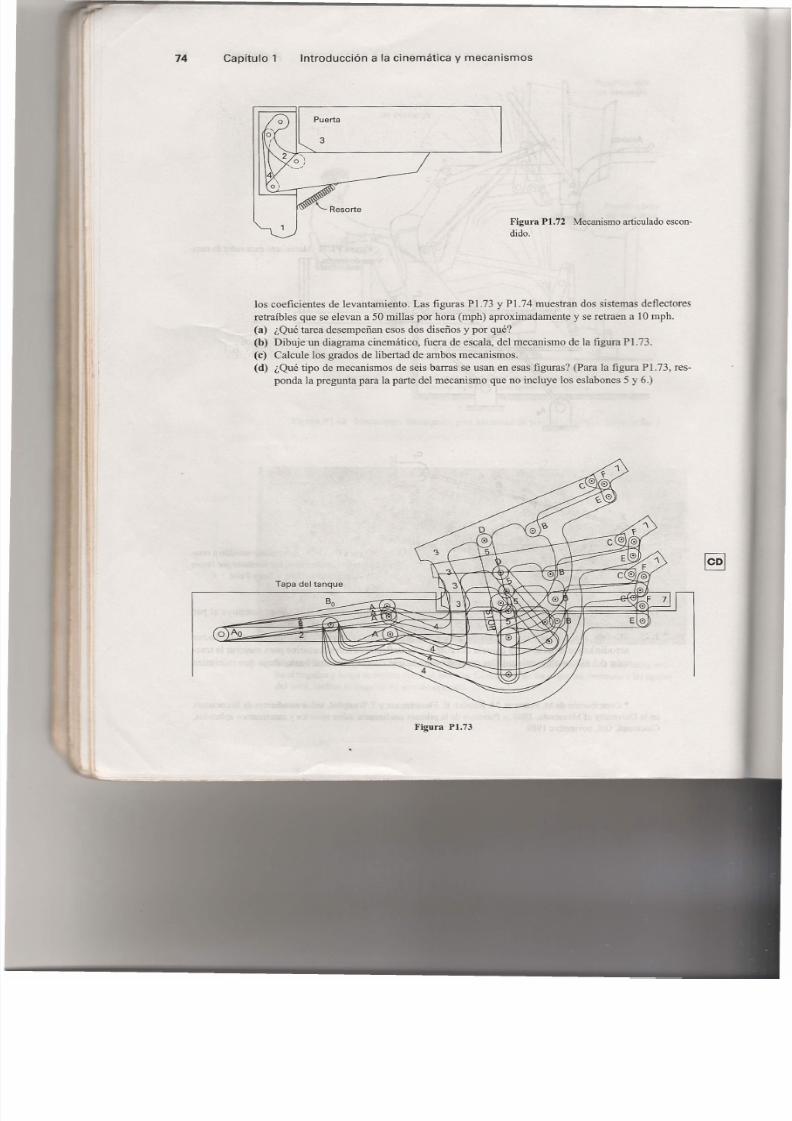
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 90/111
74 Capítulo 1 Introducción a la cinemática y mecanismos
Figura P1.72 Mecanismo articulado escon-dido.
los coeficientes de levantamiento. Las figuras Pl.73 y P1.74 muestran dos sistemas deflectores
retraíbles que se elevan a 50 millas por hora (mph) aproximadamente y se retraen a 10 mph.
(a) ¿Qué tarea desempeñan esos dos diseños y por qué?(b) Dibuje un diagrama cinemático, fuera de escala, del mecanismo de la figura P1.73.
(e) Calcule los grados de libertad de ambos mecanismos.(d) ¿Qué tipo de mecanismos de seis barras se usan en esas figuras? (Para la figura Pl.73, res-ponda la pregunta para la parte del mecanismo que no incluye los eslabones 5 y 6.)
§]
Tapa del tanque
OlA¡)
Figura P1.73
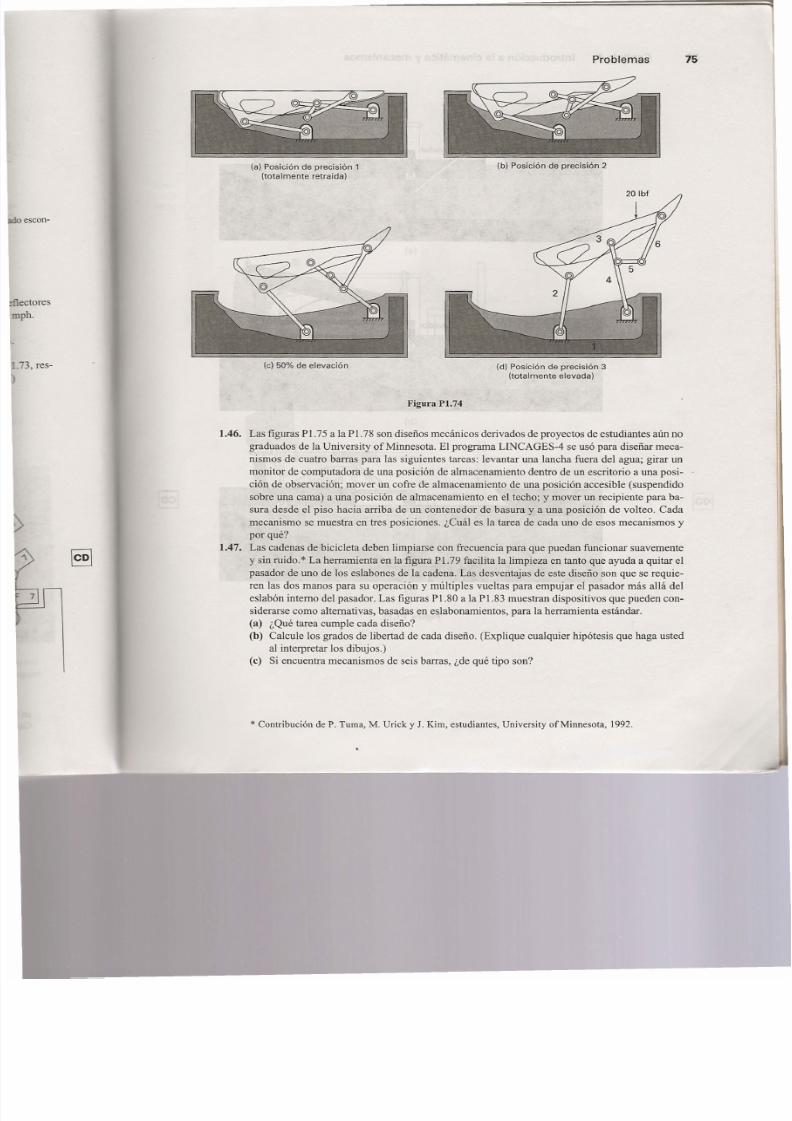
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 91/111
1.46. Las figuras P1.75 a la Pl.78 son diseños mecánicos derivados de proyectos de estudiantes aún no
graduados de la University ofMinnesota. El programa LINCAGES-4 se usó para diseñar meca-nismos de cuatro barras para las siguientes tareas: levantar una lancha fuera del agua; girar UDmonitor de computadora de una posición de almacenamiento dentro de un escritorio a una posi-
ción de observación; mover un cofre de almacenamiento de una posición accesible (suspendidosobre una cama) a una posición de almacenamiento en el techo; y mover un recipiente para ba-sura desde el piso hacia arriba de un contenedor de basura y a una posición de volteo. Cadamecanismo se muestra en tres posiciones. ¿Cuál es la tarea de cada uno de esos mecanismos y
por qué?1.47. Las cadenas de bicicleta deben limpiarse con frecuencia para que puedan funcionar suavementey sin ruido. '" La herramienta en la figura P1.79 facilita la limpieza en tanto que ayuda a quitar elpasador de uno de los eslabones de la cadena. Las desventajas de este diseño son que se requie-ren las dos manos para su operación y múltiples vueltas para empujar el pasador más allá deleslabón interno del pasador. Las figuras P1.80 a la P1.83 muestran dispositivos que pueden con-
siderarse como alternativas, basadas en eslabonamientos, para la herramienta estándar.(a) ¿Qué tarea cumple cada diseño?(b) Calcule los grados de libertad de cada diseño. (Explique cualquier hipótesis que haga usted
al interpretar los dibujos.)(e) Si encuentra mecanismos de seis barras, ¿de qué tipo son?
(a) Posición de precisión 1
(totalmente retraída)
n-
(e) 50% de elevación
§]
Problemas 75
(b) Posición de precisión 2
(d) Posición de precisión 3(totalmente elevada)
Figura P1.74
* Contribución de P. Turna, M. Urick y J. Kim, estudiantes, University ofMinnesota, 1992.
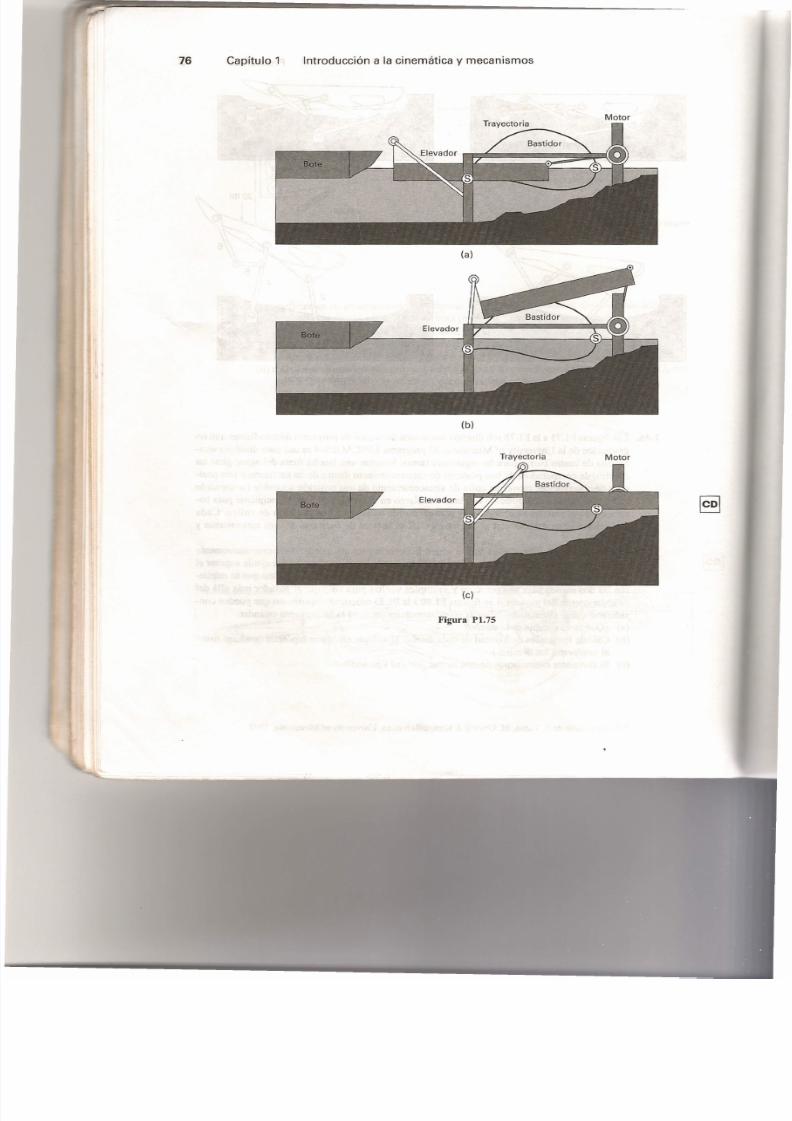
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 92/111
Capítulo 1 Introducción a la cinemática y mecanismos
§]
76
Motor
(a)
(b)
Trayectoria Motor
(e )
Figura Pl.7S
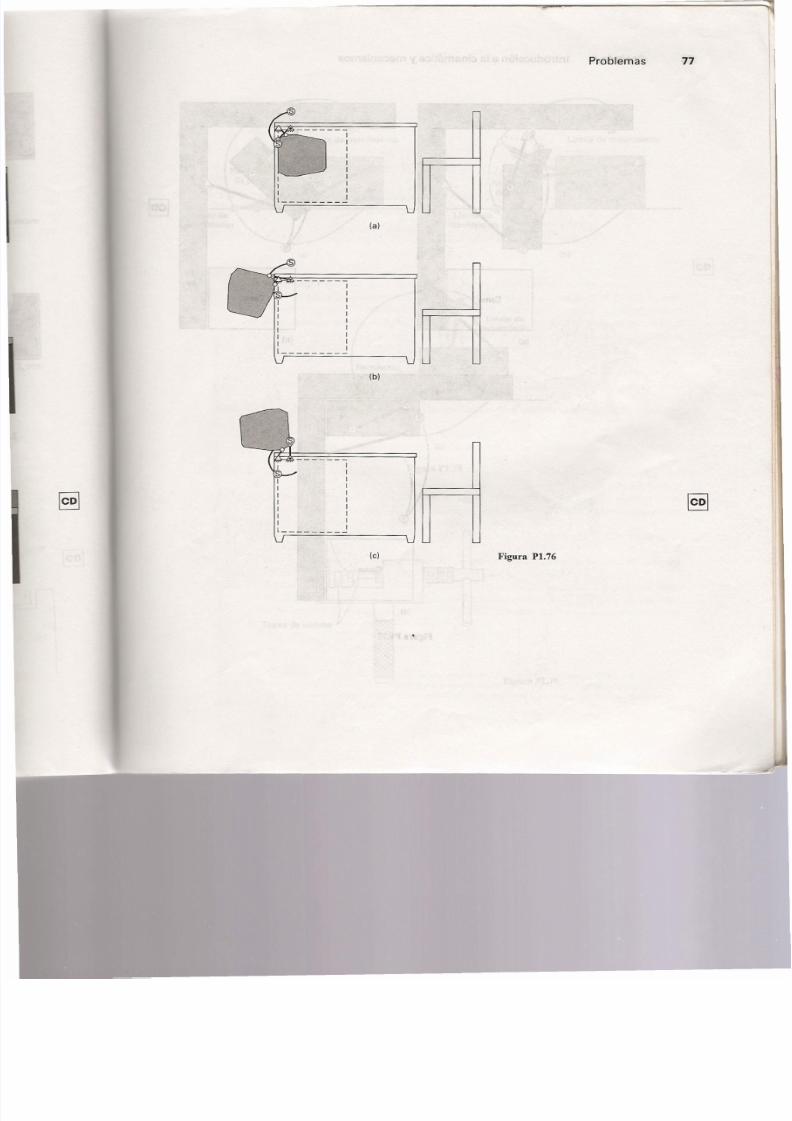
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 93/111
L
(
-I
I
I
II
I
:I
I
(
(
~
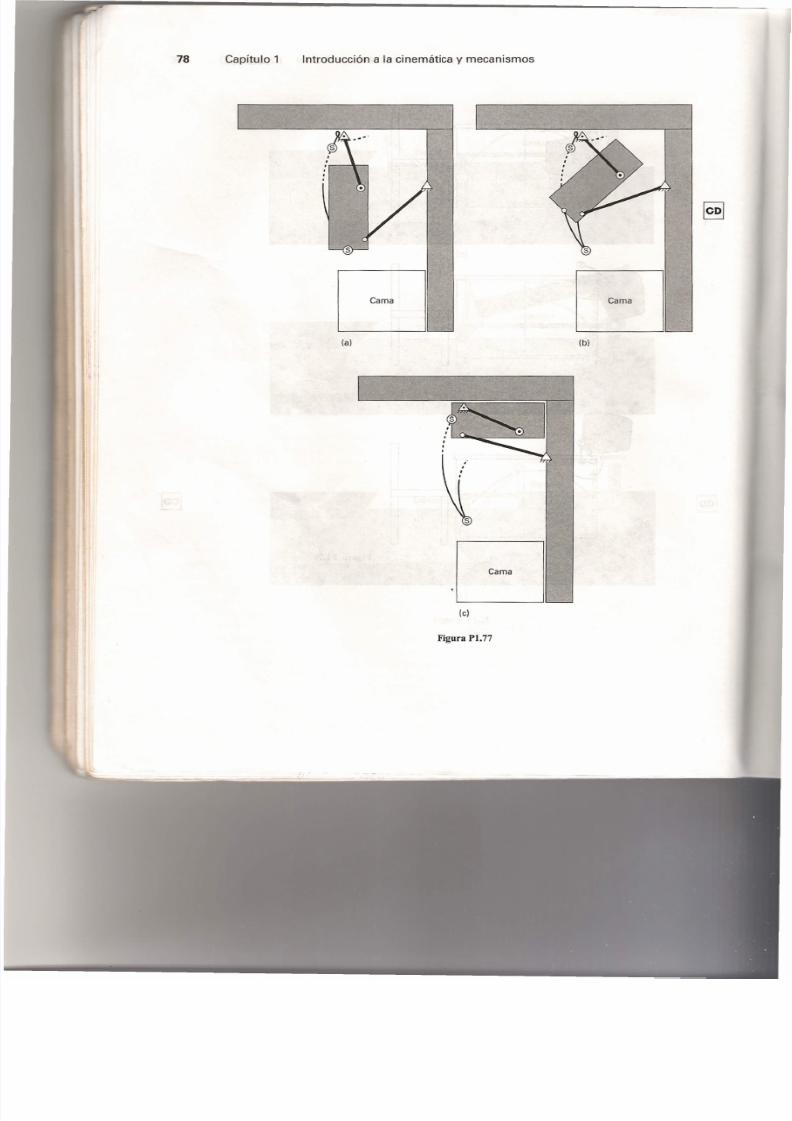
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 94/111
U
[(
(
S
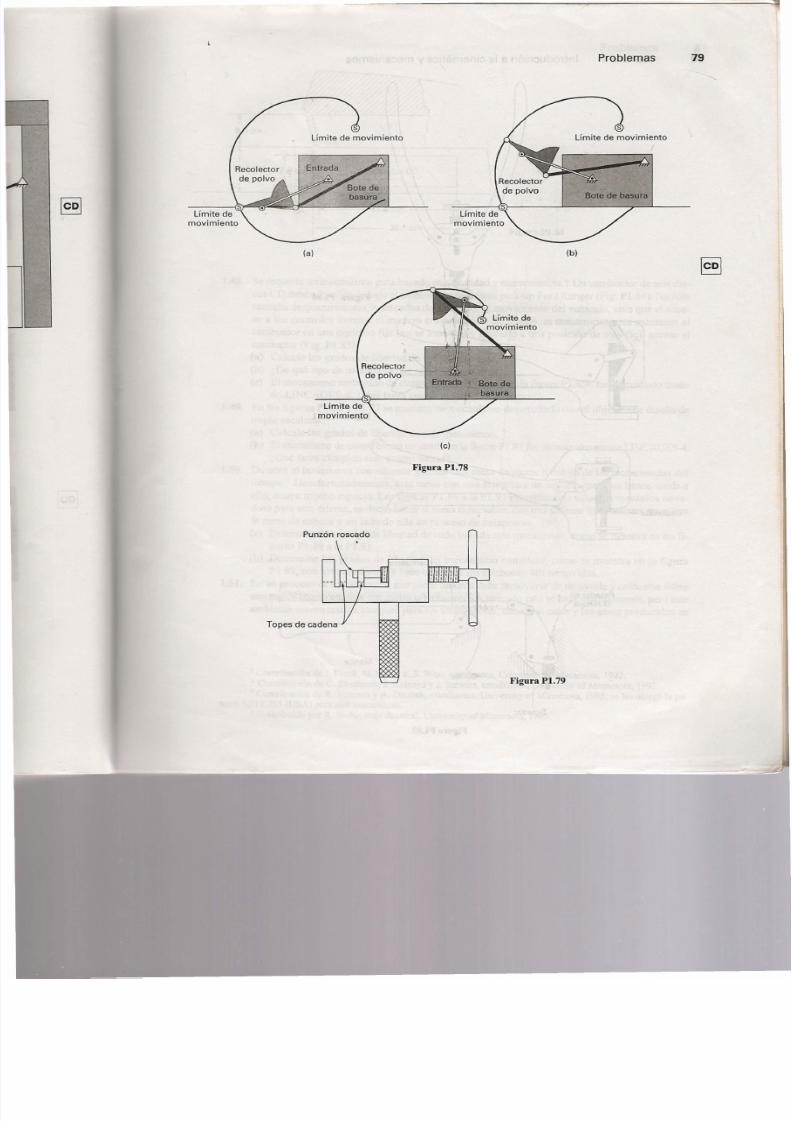
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 95/111
:§
Límite de movimiento
§]
(a)
Punzón rascado
Problemas 79
:§
Límite de movimiento
(b)
En t rad a ~ B o te de
~ - basura
(e)
Figura Pl.78
= ,
§]
Figura P1.79
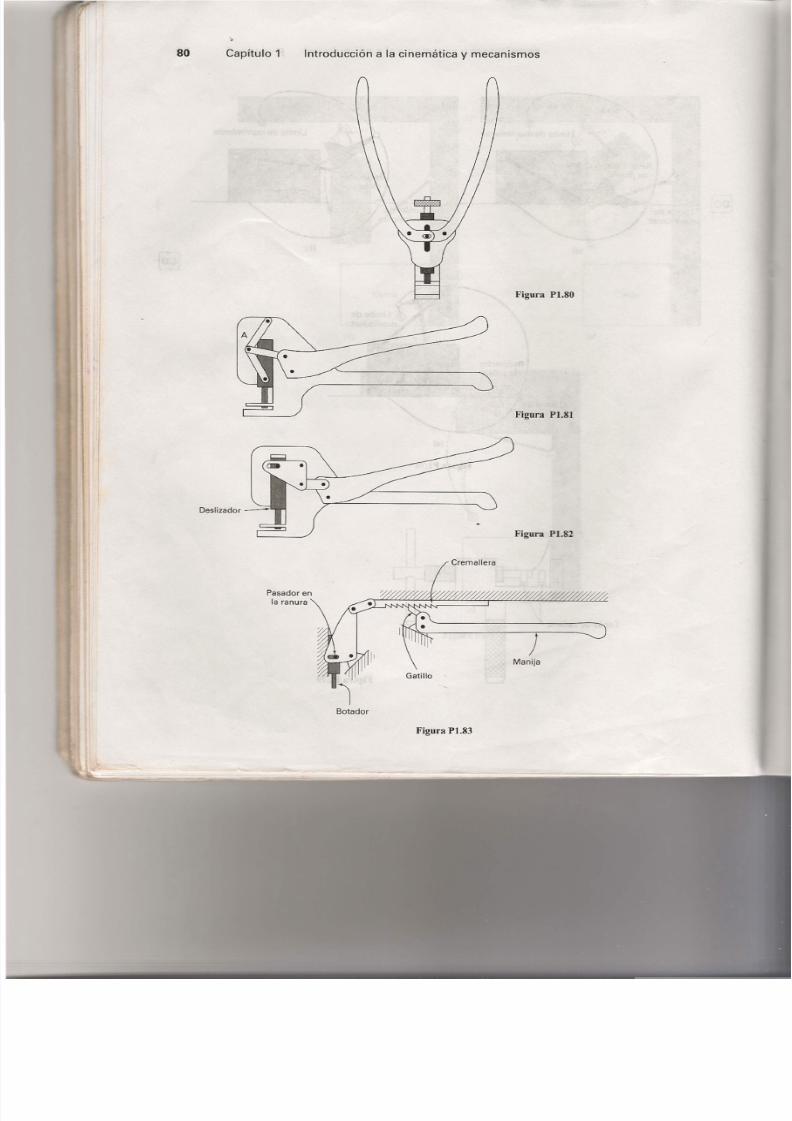
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 96/111
~
80 Capítulo 1 Introducción a la cinemática y mecanismos
Figura P1.80
Figura Pl.81
Figura P1.82
Cremallera
Pasador en
la ranura~ ~ ~
)Manija
Botador
Figura P1.83
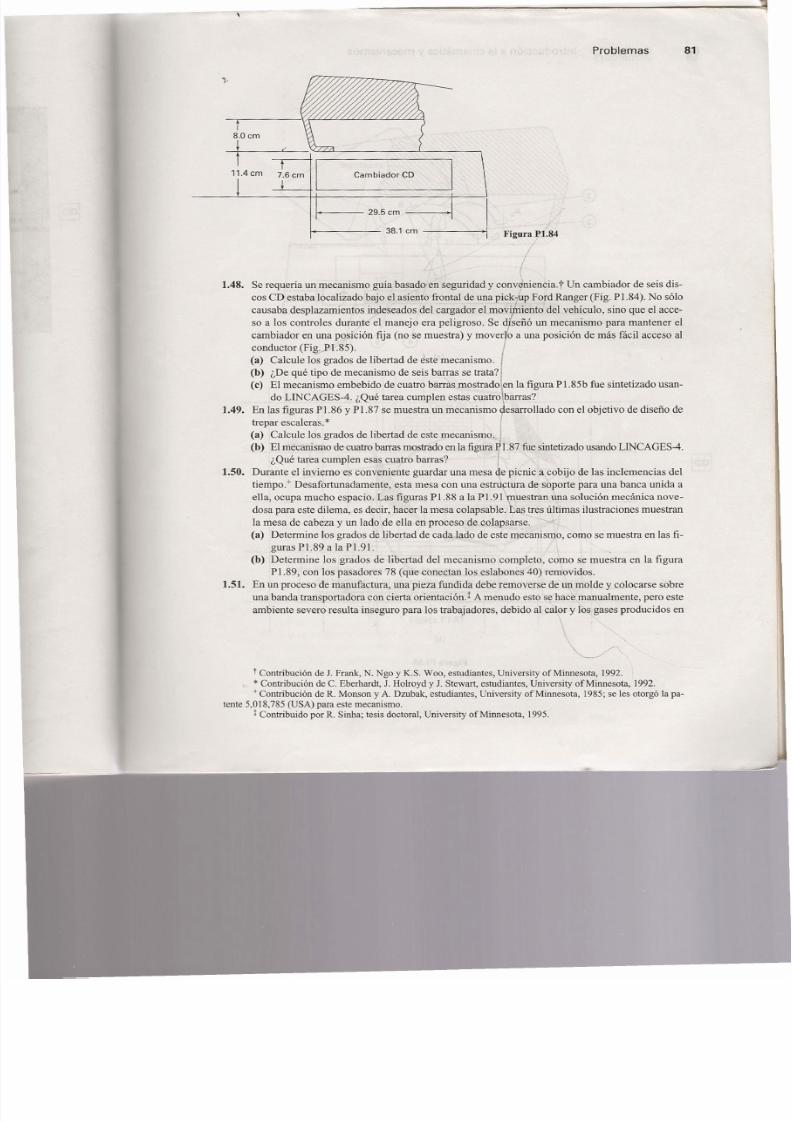
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 97/111
- - - - - - - - - - - - - - - - - - - - - - - - - - ~
Problemas 81
f8.0 cm
~ é ve/! !-f .
.
Cambiador CD
~~
Figura F1.84
/
/
1.48. Se requería un mecanismo guía basado en seguridad y conveniencia. t Un cambiador de seis dís-cos CD estaba localizado bajo el asiento frontal de una PiC~k-UPord Ranger (Fig. Pl.84). No sólocausaba desplazamientos indeseados del cargador el movi iento del vehículo, sino que el acce-
so a los controles durante el manejo era peligroso. Se dise ñó un mecanismo para mantener el
cambiador en una posición fija (no se muestra) y moverlo a una posición de más fácil acceso alconductor (Figy1.85).
(a) Calcule los grados de libertad de este mecanismo.(b) ¿De qué tipo de mecanismo de seis barras se trata?(e) El mecanismo embebido de cuatro barr'as mostradoln la figura P1.85b fue sintetizado usan-
do LINCAGES-4. ¿Qué tarea cumplen estas cuatro barras?1.49. En las figuras P1.86 y P1.87 se muestra un mecanismo. esarrollado con el objetivo de díseño de
trepar escaleras. *(a) Calcule los grados de libertad de este mecanismo.(b) El mecanismo de cuatro barras mostrado en la figura 111.87fue sintetizado usando LINCAGES-4.
¿Qué tarea cumplen esas cuatro barras?1.50. Durante el invierno es conveniente guardar una mesa de picnic a cobijo de las inclemencias del
tiempo." Desafortunadamente, esta mesa con una estructura de soporte para una banca unida a
ella, ocupa mucho espacio. Las figuras P 1.88 a la Pl.91 \nuestran una solución mecánica nove-dosa para este dílema, es decir, hacer la mesa colapsable. has tres últimas ilustraciones muestran
la mesa de cabeza y un lado de ella en proceso de colapsarse. -(a) Determine los grados de libertad de cada lado de este mecanismo, como se muestra en las fi-
guras P1.89 a la P1.91.
(b) Determine los grados de libertad del mecanismo completo, como se muestra en la figuraP1.89, con los pasadores 78 (que conectan los eslabones 40) removidos.
1.51. En un proceso de manufactura, una pieza fundida debe removerse de un molde y colocarse sobre
una banda transportadora con cierta orientación. t A menudo esto se hace manualmente, pero esteambiente severo resulta inseguro para los trabajadores, debido al calor y los gases producidos en
t Contribución de J. Frank, N. Ngo y K.S. Woo, estudiantes, University ofMinnesota, 1992.* Contribución de C. Eberhardt, J. Holroyd y J. Stewart, estudiantes, Universi ty ofMinnesota, 1992.+ Contribución de R. Monson yA. Dzubak, estudiantes, University ofMinnesota, 1985; se les otorgó la pa-
tente 5,018,785 (USA) para este mecanismo.t Contribuido por R. Sinha; tesis doctoral, University ofMinnesota, 1995.

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 98/111
S
(
-II
II
I
II
II
.
I
III
II
II
I
I .
I
I
II
II
III
I
-I
I
III
II
I
II
-II,
(
Z

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 99/111
~
Problemas 83
Figura Pl.86
Nota: El dibujo muestra dos de cuatro piernas en lados opuestos
del bastidor. Las otras dos piernas entran en contacto con
la escalera justo antes que éstas.
Figura P1.87

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 100/111
84 Capítulo 1 Introducción a la cinemática y mecanismos
•
Figura P1.90
Figura P1.88
52
•
,~"
,--
•
26 Figura P1.89
52
<,
,--1 I• . ,1
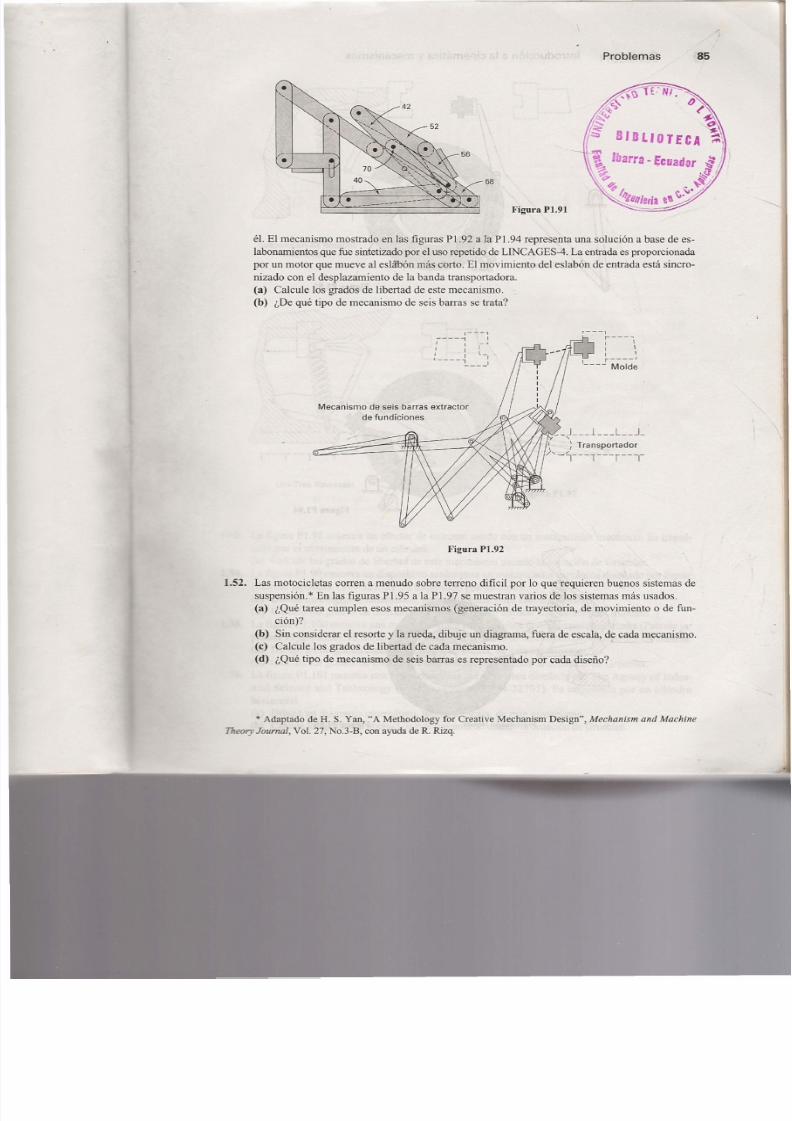
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 101/111
•",
Figura P1.91
,~-I I ..J
68
Problemas 85
él. El mecanismo mostrado en las figuras PI.92 a la PI.94 representa una solución a base de es-labonamientos que fue sintetizado por el uso repetido de LINCAGES-4. La entrada es proporcionada
por un motor que mueve al eslábón más corto. El movimiento del eslabón de entrada está sincro-nizado con el desplazamiento de la banda transportadora.(a) Calcule los grados de libertad de este mecanismo.(b) ¿De qué tipo de mecanismo de seis barras se trata?
----~--=JI I I
I I i,
I I Il , I
Mecanismo de seis barras extractorde fundiciones
r---I
r---- ....I I
I I
I I
I r----
---- Molde
__J---L--L--L
~ ; Transportador/ ' - ~- - - l - - - r - - l -
Figura P1.92
1.. 52 .. Las motocicletas corren a menudo sobre terreno dificil por lo que requieren buenos sistemas de
suspensión.* En las figuras P1.95 a la P1.97 se muestran varios de los sistemas más usados.(a) ¿Qué tarea cumplen esos mecanismos (generación de trayectoria, de movimiento o de fun-
ción)?
(b) Sin considerar el resorte y la rueda, dibuje un diagrama, fuera de escala, de cada mecanismo.(e) Calcule los grados de libertad de cada mecanismo. .
(d) ¿Qué tipo de mecanismo de seis barras es representado por cada diseño?
* Adaptado de H. S. Yan, "A Methodology for Creat ive Mechanism Design", Mechanism and Machine
Theory Joumal, Vol. 27, No.3-B, con ayuda de R. Rizq .
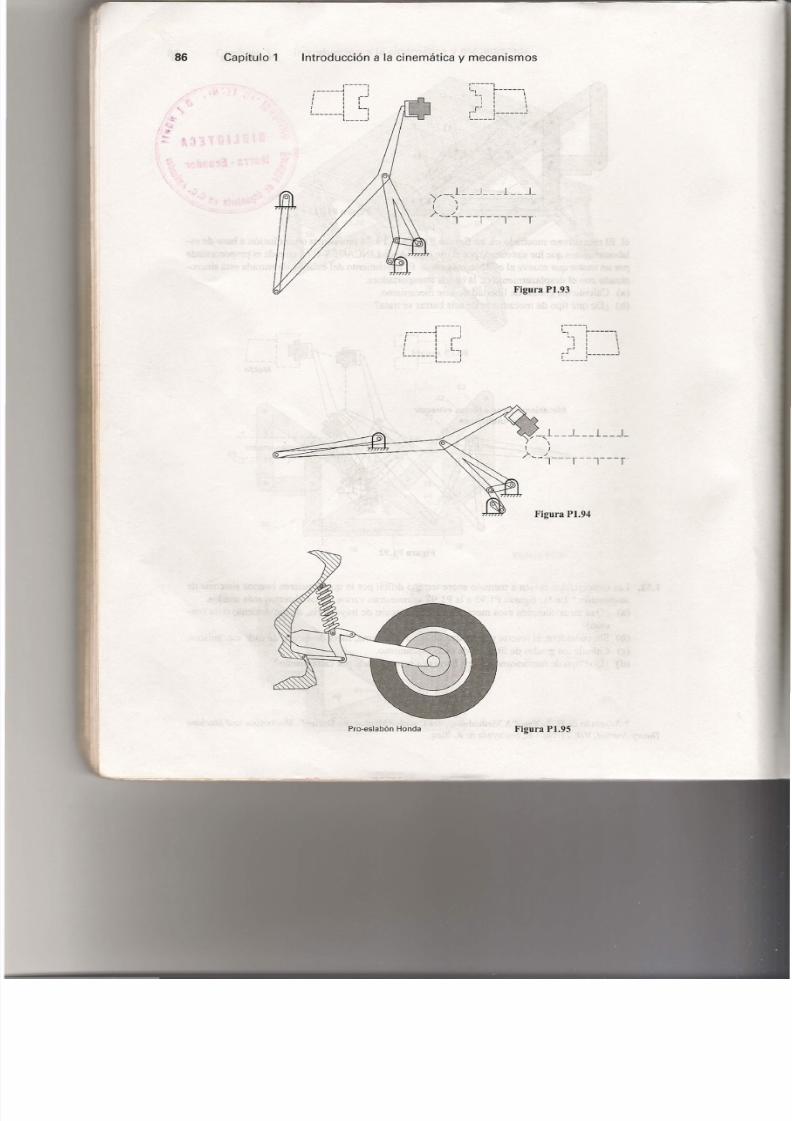
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 102/111
'-----1
,.-----~ II I II 1 1--
I I I
L - - - - - - L _ _ .
L,----~-----"I•._, 1
I I I
I I Irol 1 ,
[~ J------ ¿
Capítulo 1 Introducción a la cinemática y mecanismos6
,-----,• . . . - - - _ _ -- 1 J
: 1 1--1
I I I
L - - - - - - L _ _ .
,----1
LL~ r - - - - - \l I \
c-~~_j-- ----J
Figura P1.93
y--.~__ L_J_
I I
/--l---r--T--r
,.--.L_ L__\
I I
""--l---r--T--r-O
Figura P1.94
Pro-eslabón Honda Figura P1.95
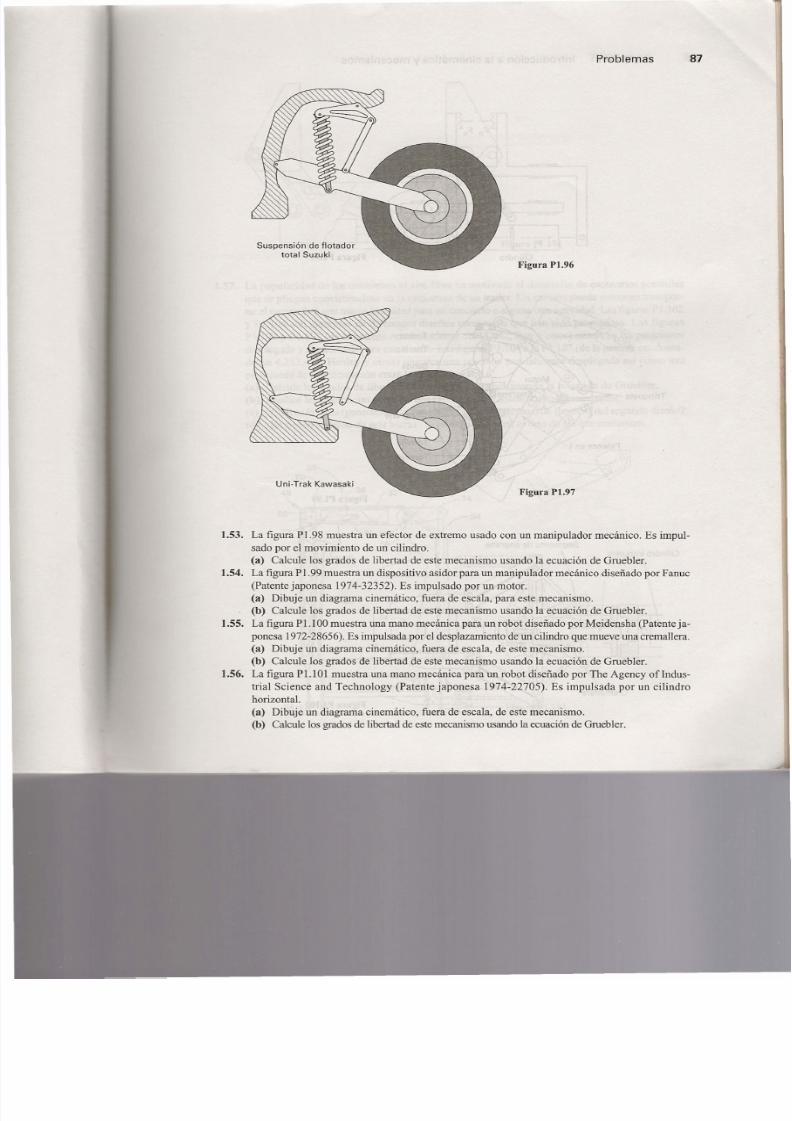
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 103/111
Problemas 87
Suspensión de flotador
total Suzuki
Figura P1.96
Uni-Trak KawasakiFigura P1.97
1.53. La figura P1.98 muestra un efector de extremo usado con un manipulador mecánico. Es impul-sado por el movimiento de un cilindro.
(a) Calcule los grados de libertad de este mecanismo usando la ecuación de Gruebler.
1.54. La figura P 1.99 muestra un dispositivo asidor para un manipulador mecánico diseñado por Fanuc(Patente japonesa 1974-32352). Es impulsado por un motor.(a) Dibuje un diagrama cinemático, fuera de escala, para este mecanismo.(b) Calcule los grados de libertad de este mecanismo usando la ecuación de Gruebler.
1.55. La figura Pl.1 00 muestra una mano mecánica para un robot diseñado por Meidensha (Patente ja-
ponesa 1972-28656). Es impulsada por el desplazamiento de un cilindro que mueve una cremallera.(a) Dibuje un diagrama cinemático, fuera de escala, de este mecanismo.
(b) Calcule los grados de libertad de este mecanismo usando la ecuación de Gruebler.1.56. La figura P 1.1O1 muestra una mano mecánica para un robot diseñado por The Agency of Indus-
trial Science and Technology (Patente japonesa 1974-22705). Es impulsada por un cilindrohorizontal.
(a) Dibuje un diagrama cinemática, fuera de escala, de este mecanismo.(b) Calcule los grados de libertad de este mecanismo usando la ecuación de Gruebler.
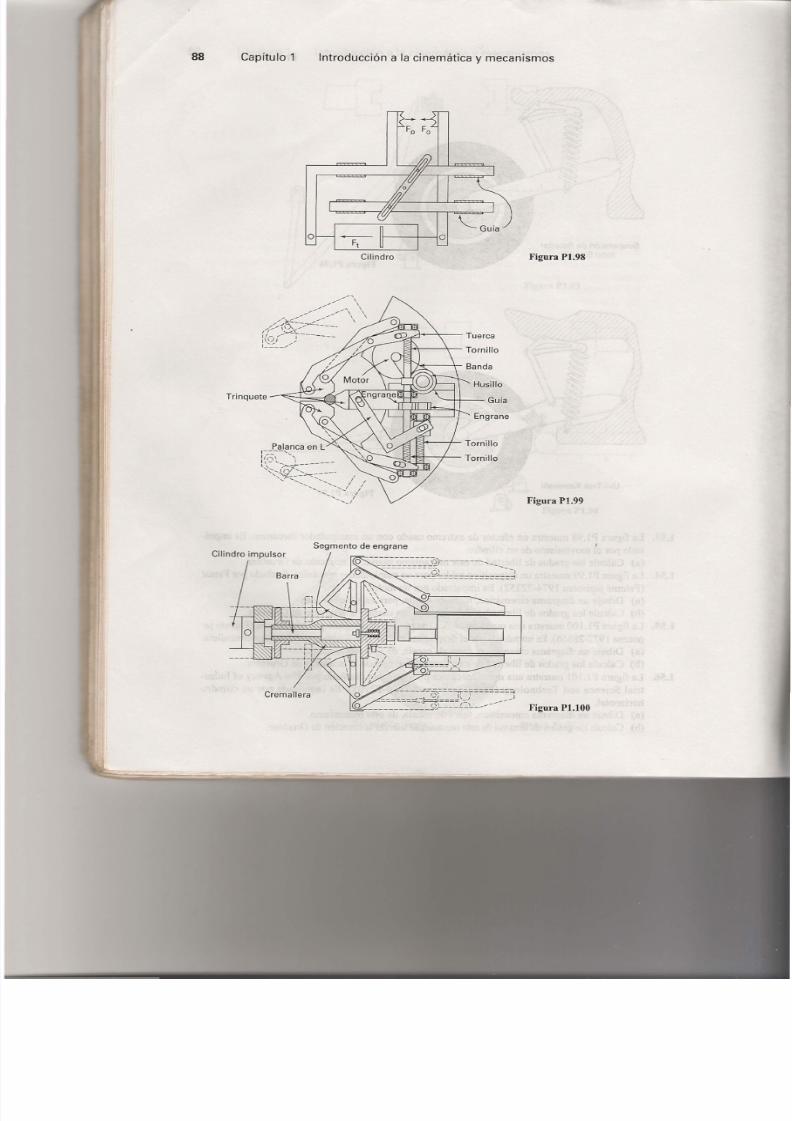
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 104/111
88 Capítulo 1 Introducción a la cinemática y mecanismos
11 I lo
Figura P1.98
o
/ / / - < : : : ; \ ,(/(>~6:..-/"" ¿ ::: - \ \1 ( 0 , . . - - - - - - 1 " - - - - -1 ... . . . . ... . ••---_/
~ \ Tuerca
§.\ \ Tornillo
Banda
Husillo
Trinquete~ '- I I Guía
Engrane
Palanca en Lr-".-.....-',11( ..•• ' ••.
t \ - " ' ; ...J--------''",::...!.!l.-~~:----..........................:<,,'
" I< _1
~. / Tornillo
~~.I€! / Tornillo
Figura P1.99
Segmento de engrane
- ~ ~ ~ ~ ~ ~ ~ ~ ~ : : ~ : : : : : : : : : : : : : ~
L = : : J
Cremallera - - - - J =~~~==~=f =======~~ 1 , I __
- '= = = = = = " " - - ¡ ~ - ; . : ' . : ' . :' i' :' - - - - Figura Pl.I00-------------
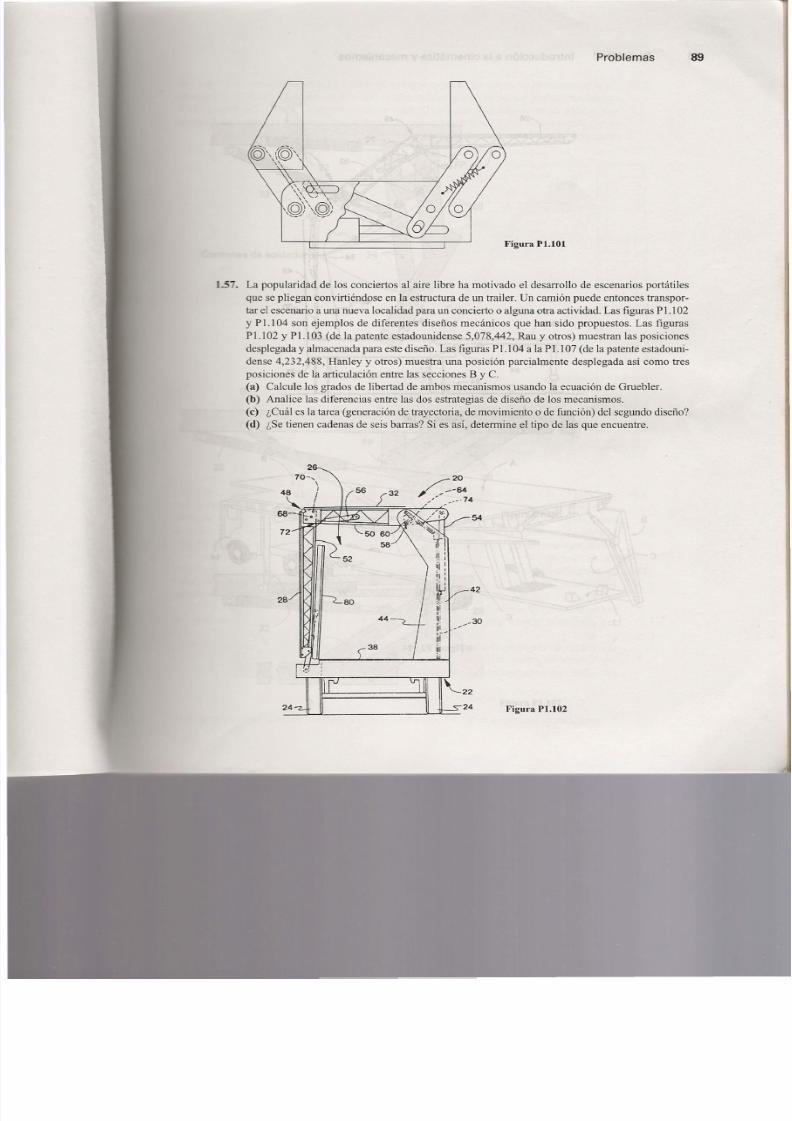
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 105/111
Problemas 89
Figura P1.101
1.57. La popularidad de los conciertos al aire libre ha motivado el desarrollo de escenarios portátilesque se pliegan convirtiéndose en la estructura de un trailer. Un camión puede entonces transpor-tar el escenario a una nueva localidad para un concierto o alguna otra actividad. Las figuras Pl.102y P 1.104 son ejemplos de diferentes diseños mecánicos que han sido propuestos. Las figurasPl.l02 y Pl.l03 (de la patente estadounidense 5,078,442, Rau y otros) muestran las posiciones
desplegada y almacenada para este diseño. Las figuras P 1.104 a la P 1.107 (de la patente estadouni-dense 4,232,488, Hanley y otros) muestra una posición parcialmente desplegada así como tresposiciones de la articulación entre las secciones B y C.(a) Calcule los grados de libertad de ambos mecanismos usando la ecuación de Gruebler.(b) Analice las diferencias entre las dos estrategias de diseño de los mecanismos.(e) ¿Cuál es la tarea (generación de trayectoria, de movimiento o de función) del segundo diseño?(d) ¿Se tienen cadenas de seis barras? Si es así, determine el tipo de las que encuentre.
54
42
Ijl
¡¡ ¡
¡ ¡i
ir" 1-
/30/
"--22
24
Figura P1.102
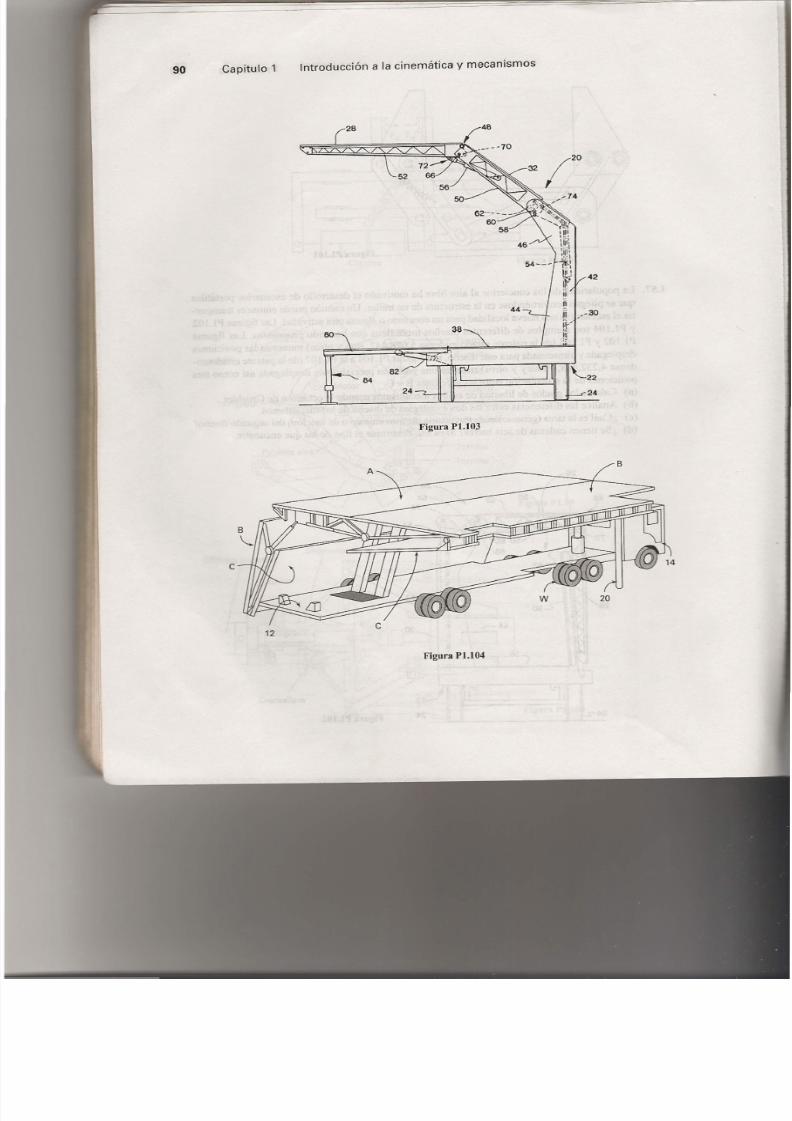
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 106/111
90 Capítulo 1 Introducción a la cinemática Y mecanismos
26
6056
42
",30
60
62 '--22
24
64
24
Figura P1.103
B
e
e12
Figura P1.104
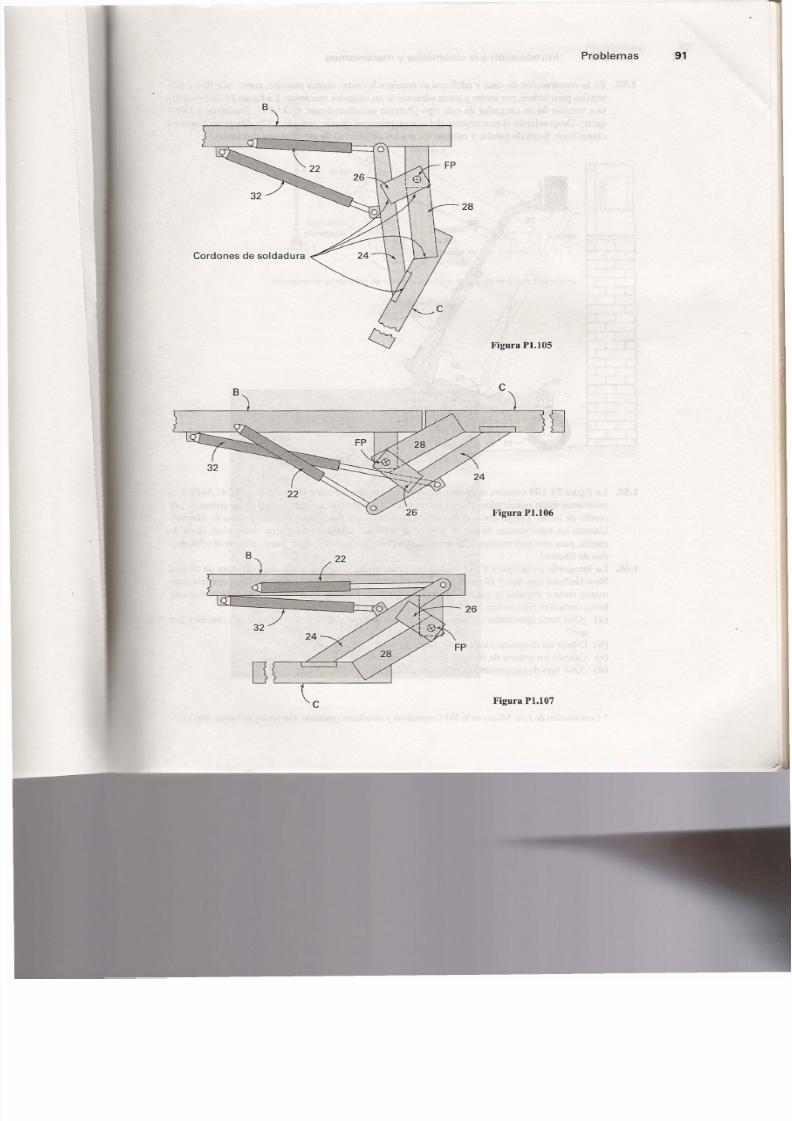
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 107/111
B
3228
Cordones de soldadura
Figura P1.l0S
BC
) ~--5J )[]
Figura P1.106
B _ 22
/""
O
~26
32/.> ( '~/
24
//AFP
O\
CFigura Pl.107
Problemas 91
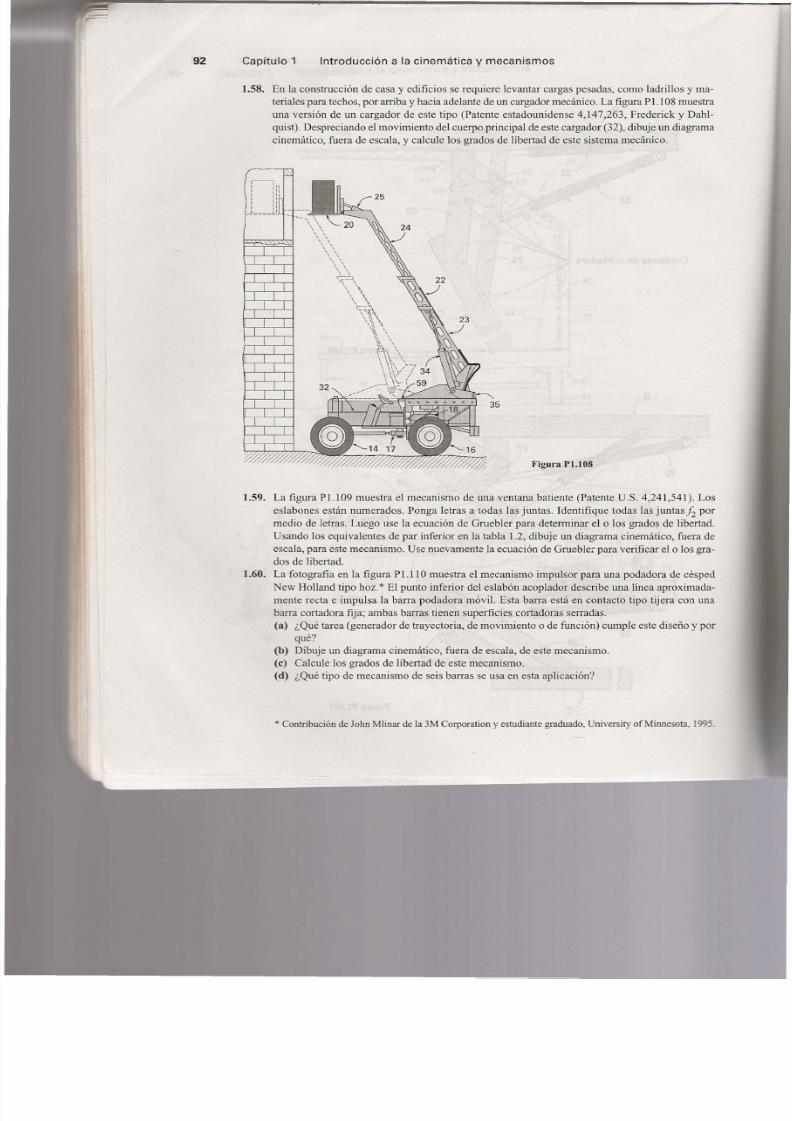
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 108/111
92 Capítulo 1 Introducción a la cinemática y mecanismos
1.58. En la construcción de casa y edificios se requiere levantar cargas pesadas, como ladrillos y ma-teriales para techos, por arriba y hacia adelante de un cargador mecánico. La figura Pl.108 muestra
una versión de un cargador de este tipo (patente estadounidense 4,147,263, Frederick y Dahl-quist). Despreciando el movimiento del cuerpo principal de este cargador (32), dibuje un diagramacinemático, fuera de escala, y calcule los grados de libertad de este sistema mecánico.
Figura P1.108
35
1.59. La figura Pl.109 muestra el mecanismo de una ventana batiente (Patente U.S. 4,241,541). Loseslabones están numerados. Ponga letras a todas las juntas. Identifique todas las juntas 1 2 pormedio de letras. Luego use la ecuación de Gruebler para determinar el o los grados de libertad.
Usando los equivalentes de par inferior en la tabla 1.2, dibuje un diagrama cinemático, fuera deescala, para este mecanismo. Use nuevamente la ecuación de Gruebler para verificar el o los gra-dos de libertad.
1.60. La fotografia en la figura Pl.ll0 muestra el mecanismo impulsor para una podadora de césped
New Holland tipo hoz.* El punto inferior del eslabón acoplador describe una línea aproximada-mente recta e impulsa la barra podadora móvil. Esta barra está en contacto tipo tijera con una
barra cortadora fija; ambas barras tienen superficies cortadoras serradas.(a) ¿Qué tarea (generador de trayectoria, de movimiento o de función) cumple este diseño y por
qué?(b) Dibuje un diagrama cinemático, fuera de escala, de este mecanismo.(e) Calcule los grados de libertad de este mecanismo.(d) ¿Qué tipo de mecanismo de seis barras se usa en esta aplicación?
* Contribución de John Mlinar de la 3M Corporation y estudiante graduado, University ofMinnesota, 1995_
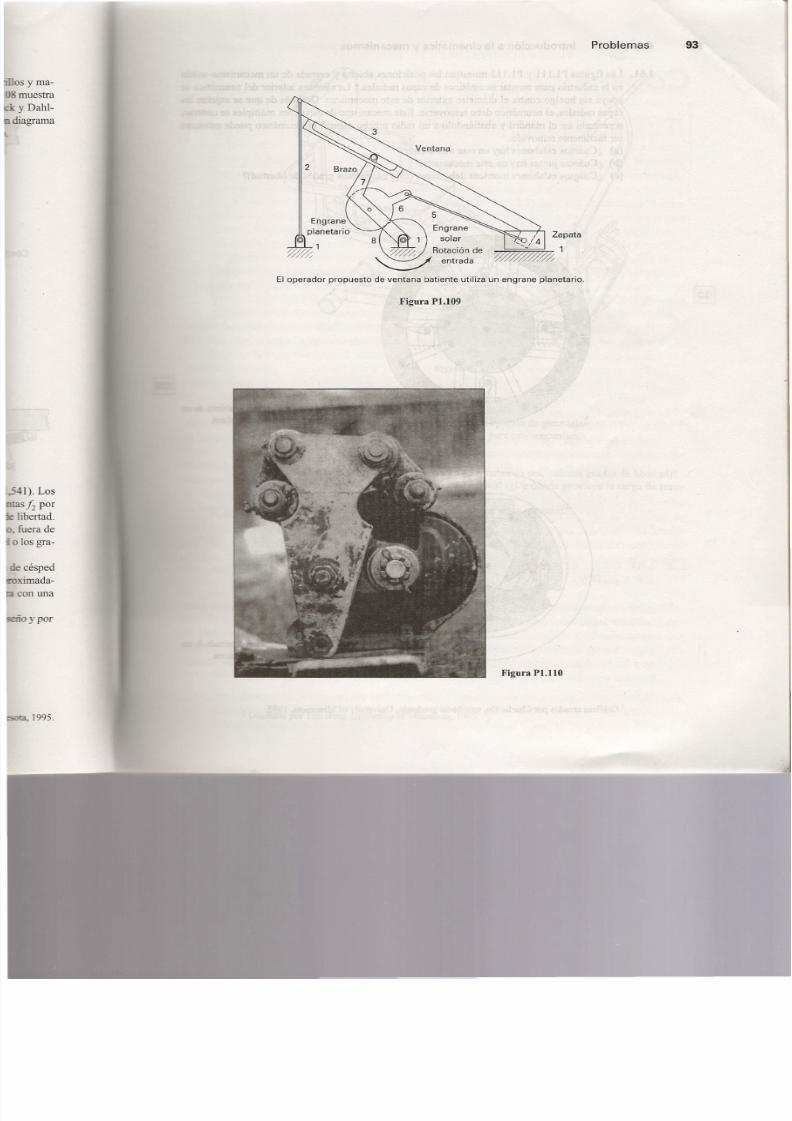
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 109/111
ma-trahl-
ma
Figura Pl.l09
Figura PUlO
Problemas 93

7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 110/111
94 Capítulo 1 Introducción a la cinemática y mecanismos
1.61. Las figuras P1.111 y Pl.1l2 muestran las posiciones abierta y cerrada de un mecanismo usado
en la industria para montar neumáticos de capas radiales. t La abertura interior del neumático seapoya sin huelgo contra el diámetro exterior de este mecanismo. Después de que se sujetan lascapas radiales, el neumático debe removerse. Este mecanismo de eslabones múltiples se contrae,
separando así el mandril y abatiéndolo a un radio mucho menor. El neumático puede entoncesser fácilmente removido.(a) ¿Cuántos eslabones hay en este mecanismo?
(b) ¿Cuántas juntas hay en este mecanismo?
(e) ¿Cuántos eslabones motrices debe haber (esto es, cuántos grados de libertad)?
§]
Figura P1.111 Configuración abierta de un
mecanismo contractor de neumáticos.
Figura P1.112 Configuración cerrada de unmecanismo contractor de neumáticos.
t Gráficas creadas por Charlie Ho, estudiante graduado, University ofMinnesota, 1995.
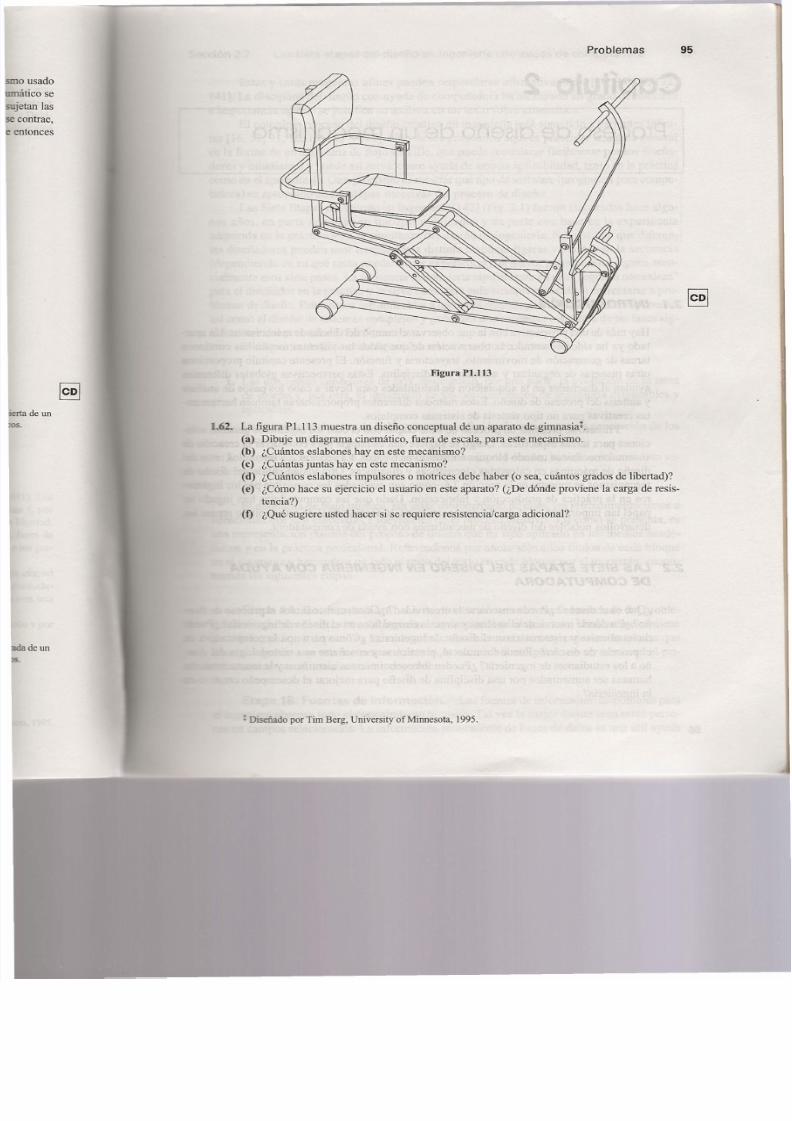
7/22/2019 Diseño de Mecanismos Análisis y Síntesis (George Sandor Cap 1)
http://slidepdf.com/reader/full/diseno-de-mecanismos-analisis-y-sintesis-george-sandor-cap-1 111/111
§]
Problemas 95
adose
las
ces
Figura P1.113
§]
un
1.62. La figura Pl.l13 muestra un diseño conceptual de un aparato de gimnasial.
(a) Dibuje un diagrama cinemático, fuera de escala, para este mecanismo.(b) ¿Cuántos eslabones hay en este mecanismo?(e) ¿Cuántas juntas hay en este mecanismo?(d) ¿Cuántos eslabones impulsores o motrices debe haber (o sea, cuántos grados de libertad)?
(e) ¿Cómo hace su ejercicio el usuario en este aparato? (¿De dónde proviene la carga de resis-tencia?)
(f) ¿Qué sugiere usted hacer si se requiere resistencia/carga adicional?







![Diseño de Mecanismos - Analisis y Sintesis [Erdman & Sandor - 3ED].pdf](https://static.fdocumento.com/doc/165x107/563db885550346aa9a946d36/diseno-de-mecanismos-analisis-y-sintesis-erdman-sandor-3edpdf.jpg)