DISEÑO DE UN DETECTOR FOTOACÚSTICO DE AGUA EN EL AIRE
70
IEL2-I-04-05 DISEÑO DE UN DETECTOR FOTOACÚSTICO DE AGUA EN EL AIRE MARCELO BAQUERO RUIZ Informe de Proyecto de Grado Mauricio Guerrero Hurtado Asesor de Proyecto UNIVERSIDAD DE LOS ANDES DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA BOGOTÁ AGOSTO DE 2004
Transcript of DISEÑO DE UN DETECTOR FOTOACÚSTICO DE AGUA EN EL AIRE

IEL2-I-04-05
DISEÑO DE UN DETECTOR FOTOACÚSTICO DE AGUA EN EL AIRE
MARCELO BAQUERO RUIZ
Informe de Proyecto de Grado
Mauricio Guerrero Hurtado Asesor de Proyecto
UNIVERSIDAD DE LOS ANDES DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
BOGOTÁ AGOSTO DE 2004

IEL2-I-04-05
1
CONTENIDO
Página INTRODUCCIÓN 3 OBJETIVOS 4 1. MARCO TEÓRICO 5 1.1 LA DETECCIÓN DE GASES 5 1.2 ¿QUÉ ES LA ESPECTROSCOPÍA? 5 1.3 EL EFECTO FOTOACÚSTICO 7 2. ESPECIFICACIÓN DEL PROBLEMA Y DE SU SOLUCIÓN 10 2.1 DETECCIÓN DE LA CONCENTRACIÓN DE AGUA EN EL AIRE 10 2.2 ESPECIFICACIÓN DEL MÉTODO DE DETECCIÓN 10 2.3 ARQUITECTURA DE LA SOLUCIÓN DEL PROBLEMA 14 2.4 DEFINICIÓN DE TAREAS 15 3. DISEÑO DEL SISTEMA 17 3.1 CELDA FOTOACÚSTICA 17 3.2 CIRCUITO DE ALIMENTACIÓN Y MODULACIÓN DE LUZ 20 3.3 CIRCUITO DE TRATAMIENTO DE LA SEÑAL ELÉCTRICA 22 3.4 CONTROLADOR Y VISUALIZACIÓN 24 3.5 MONTAJE DEFINITIVO 29 4. RESULTADOS 30 4.1 PRUEBAS DE LA CELDA FOTOACÚSTICA 30 4.2 PRUEBAS DEL CIRCUITO 33 4.3 PRUEBAS DEL SISTEMA COMPLETO 34 CONCLUSIONES 39 BIBLIOGRAFÍA 40 ANEXOS 42 A.1 MANUAL DE USUARIO A.2 PLANOS DE LA CELDA A.3 PLANOS DEL CIRCUITO A.4 DATASHEET DEL LED A.5 CÓDIGO DEL MICROCONTROLADOR

IEL2-I-04-05
2
LISTA DE FIGURAS
Página Figura 1. Esquema de detección fotoacústica.
11
Figura 2. Espectro de absorción del agua.
13
Figura 3. Arquitectura del sistema.
14
Figura 4. Definición de tareas del sistema.
15
Figura 5. Diseño general del sistema.
17
Figura 6. Resonador de Helmholtz.
17
Figura 7. Filtro pasa-bajas acústico (tipo “cámara de expansión”).
19
Figura 8. Celda fotoacústica.
20
Figura 9. Arquitectura del circuito de alimentación de la fuente lumínica.
21
Figura 10. Esquemático del circuito de alimentación de la fuente lumínica.
21
Figura 11. Arquitectura del bloque de tratamiento de la señal eléctrica.
22
Figura 12. Diagrama del filtro pasa-bandas.
22
Figura 13. Esquemático del bloque de tratamiento de la señal eléctrica.
24
Figura 14. Diagrama de estados del control de proceso.
26
Figura 15. Esquemático del circuito de control y visualización.
28
Figura 16. Esquemático de los circuitos reguladores de tensión.
29
Figura 17. Diagrama de bloques del sistema acústico (para las pruebas).
30
Figura 18. Respuesta en frecuencia del resonador.
31
Figura 19. Prueba de la celda fotoacústica (para variaciones en la concentración de vapor de agua).
35

IEL2-I-04-05
3
INTRODUCCIÓN
La detección de compuestos químicos en el ambiente es un problema de suma importancia en diversas actividades: tanto en la industria como en la investigación y la milicia, entre otras, la presencia de ciertas moléculas en el aire puede implicar peligros para la salud, condiciones desfavorables para procesos químicos y biológicos, e incluso, la presencia de microorganismos indeseados (en salas de operaciones, etcétera). En algunos casos, la presencia de un gas puede dar también información sobre los alrededores: algunas sustancias (como ocurre con ciertos explosivos) liberan moléculas al ambiente y dejan “huellas” que permiten identificarlas sin necesidad de realizar procedimientos peligrosos de monitoreo. Así, la determinación de la concentración de un gas en un lugar específico (fuera del laboratorio) puede aportar una información valiosísima sobre el entorno, que de otra manera sería muy difícil de obtener. Aunque existen muchos métodos de identificación de compuestos químicos, la detección in-situ de gases en el aire (a presión atmosférica y temperatura ambiente) exige ciertos requerimientos difíciles de alcanzar con otros procedimientos tradicionales: en casi todos ellos se requieren sistemas ópticos complejos que, si bien permiten identificar con precisión una grandísima cantidad de compuestos (con un mismo dispositivo), exigen condiciones de laboratorio para poder ser utilizados; el tamaño, el peso, el consumo de energía e incluso la preparación de muestras para ser analizadas hacen de estos sistemas opciones inaceptables para cumplir nuestro objetivo: medir la concentración de un gas específico en el aire. Como en este caso no se quieren determinar “huellas digitales” para identificar otros compuestos, puede construirse un sistema que únicamente responda a la presencia del gas en cuestión. El efecto fotoacústico permite hacer eso: dado que las moléculas de varios compuestos tienen espectros de absorción de radiación electromagnética bien definidos, se puede escoger una frecuencia en la que el gas que se quiere identificar absorba “fuertemente” y los otros constituyentes del aire no. Si se aplica una excitación (lumínica) de esa longitud de onda modulada a cierta frecuencia en el rango audible, la absorción periódica de ondas electromagnéticas por parte del gas produce una onda de presión (sonido) en el aire circundante que puede ser detectado por un micrófono. Como la amplitud de la señal de voltaje del micrófono es proporcional a la de la onda de presión incidente y esta última es proporcional a la concentración del gas buscado (para un correcto diseño, con ciertas restricciones), se puede obtener una señal eléctrica que, trabajada de manera adecuada, brinda información directa sobre la concentración del gas en la muestra de aire considerada. La detección de gases puede realizarse diseñando un sistema electrónico que genere la excitación adecuada y procese la información obtenida a partir de las muestras de aire para llegar a los resultados buscados. Este trabajo enseña que no se requieren equipos especializados para esas tareas: es posible emplear materiales y dispositivos comerciales para dar forma a un detector con las características propuestas.

IEL2-I-04-05
4
OBJETIVOS
El propósito principal del proyecto es construir un dispositivo capaz de medir la concentración de vapor de agua en el aire en condiciones ambientales (de temperatura y presión), ofreciendo la posiblidad de operar fuera del laboratorio de manera independiente (esto es, sin necesidad de otros aparatos para su alimentación o funcionamiento) sin sacrificar la selectividad, sensitividad y reproductibilidad que pueden alcanzarse en ambientes controlados. Para lograrlo, es preciso cumplir los siguientes objetivos: 1. Encontrar el método de identificación de sustancias que mejor se ajuste, realizando una
investigación profunda de las diferentes formas en que se realizan detecciones y analizando las ventajas y desventajas que pueden traer al proyecto.
2. Construir, con base en esos resultados, un prototipo que sea capaz de extraer la información buscada de una muestra de aire y sea acorde con las exigencias de fácil transporte, operación y costo reducido.
3. Diseñar e implementar una parte electrónica que sea capaz de interpretar las señales provenientes de ese dispositivo para poder mostrar los datos buscados, y que sea flexible en su calibración para que sirva de plataforma de manejo y de centro de pruebas para diferentes configuraciones que puedan surgir en el desarrollo.
En este documento se describe el procedimiento seguido para alcanzar las metas planteadas.

IEL2-I-04-05
5
1. MARCO TEÓRICO 1.1 LA DETECCIÓN DE GASES. La detección de la presencia de gases es un problema muy común: tanto en la industria como en la medicina, la biología y la investigación científica, la determinación de la concentración de ciertos gases en el ambiente permite realizar y controlar una gran variedad de procesos químicos e industriales, monitorear el desarrollo de procesos biológicos, observar la calidad del aire, advertir peligros para la salud humana y hasta inferir la presencia de otros materiales en las cercanías del sitio de la medición [3, 7]. Para identificar un gas específico, es necesario encontrar una característica que lo haga único frente a otros similares. Existen muchas maneras de hacerlo: observando propiedades cualitativas visibles como colores y opacidades, olores, etcétera. Pero, ¿qué pasa cuando esa presencia no es tan evidente (como puede ocurrir con gases como el monóxido de carbono), o cuando es necesario cuantificarla? Deben encontrarse particularidades más “objetivas” que puedan ser aprovechadas por dispositivos específicos para lograr esa identificación. Muchos fenómenos físicos y químicos presentan alternativas en este respecto: La afinidad y/o la reactividad con otros compuestos permite mediciones muy selectivas (esto es, que la posibilidad que un gas diferente contribuya con las medidas es muy pequeña), pero presenta problemas de reproductibilidad y grandes variaciones con el cambio de las variables ambientales. En la Universidad se han trabajado sensores de gas usando dióxido de estaño que muestran grandes avances en ese sentido [14] y que prometen unos excelentes resultados para aplicaciones en la agroindustria. De hecho, este ha resultado ser un terreno fértil de investigación motivado por la aparición y desarrollo de nuevas tecnologías como la fabricación de MEMs (Micro Máquinas Eléctricas, por sus siglas en inglés), que han abierto la posibilidad de manipular la materia en las dimensiones que se requieren para este fin (ver [15, 17]). Existen otras alternativas que presentan grandes mejoras en la reproductibilidad, pues involucran fenómenos físicos que no implican reacciones con la muestra; en vez de ello, se aprovecha la forma como interactúa con ciertas radiaciones para poder sacar conclusiones al respecto. Ese es el terreno de la espectroscopía. 1.2 ¿QUÉ ES LA ESPECTROSCOPÍA? La espectroscopía es un término general para la ciencia que estudia las interacciones de diferentes tipos de radiación con la materia [8]. Para el caso de las ondas electromagnéticas, el estudio se basa en la investigación de seis fenómenos diferentes en los que pueden ocurrir interacciones: absorción, fluorescencia, fosforescencia, dispersión, emisión y quemiluminiscencia. A través de los métodos espectrométricos, esto es, de los cálculos realizados con mediciones de intensidad de la radiación en consideración, es posible inferir qué sustancias

IEL2-I-04-05
6
componen una muestra, y de qué manera lo hacen. En general, esto se logra mediante la característica de intensidad contra frecuencia de las ondas electromagnéticas provenientes de la muestra (su espectro), pues la forma en que radiaciones de distintas frecuencias interactúan con la materia es propia de los elementos y compuestos químicos presentes. Existen varias técnicas para obtener ese tipo de información. Algunas de ellas se describen a continuación (para una discusión más amplia al respecto, ver [8]):
- Espectroscopía NMR (Resonancia Magnética Nuclear): Cuando los espines de los protones y neutrones que conforman los núcleos de los átomos no están “emparejados” (no se cancelan mutuamente), el espín total del núcleo (cuyos protones son cargas eléctricas positivas) genera un dipolo magnético sobre el eje del espín. Al someter átomos con estas características (no todos los elementos poseen núcleos de este tipo) a campos magnéticos muy fuertes se logra que sus núcleos tiendan a alinear su momento magnético con el campo externo. Sin embargo, al alinearse, presentan un movimiento de precesión que tiene una frecuencia muy específica dependiendo del átomo en cuestión (llamada frecuencia de Larmor, que tiende a estar en el orden de los MHz). Si en ese estado se envían ondas electromagnéticas de frecuencia igual a la de Larmor (de cierta forma y con cierta disposición), los núcleos pueden absorber esos fotones para pasar a niveles de energía más altos. Esta absorción es característica de ciertos núcleos, así que la ausencia de frecuencias específicas en el espectro de la señal observada que sale de la muestra permite identificar la presencia de un elemento químico particular.
- Espectroscopía de Masa: Cuando partículas cargadas eléctricamente (ionizadas) se mueven a través de campos electrostáticos y magnéticos, experimentan fuerzas que las hacen cambiar su trayectoria (la relación de Lorentz establece que F=q(E+vxB)). Ese movimiento depende también de la masa de la partícula en consideración; así, si se conocen los campos, la trayectoria de las partículas depende únicamente de sus masas (sus cargas se suponen iguales), y dado que ésta es una propiedad muy específica de cada molécula, la cuenta de cuántas partículas siguen una trayectoria determinada permite determinar con gran precisión qué moléculas están presentes en una muestra, y en qué proporción.
- Espectroscopía IR (de Infra-Rojo): La luz interactúa con la materia al nivel atómico y molecular acoplándose a distribuciones de carga oscilantes. Cuando la frecuencia de la radiación electromagnética es igual a la de resonancia de la carga oscilante, el acople llega a ser muy fuerte. En el caso de las ondas infrarrojas, éstas tienden a acoplarse muy eficazmente a las vibraciones que existen en las moléculas, pues las masas y las fuerzas presentes en esa escala actúan como osciladores con frecuencias típicas cercanas a los 45 terahertz. Cuando se hace incidir luz infrarroja en una molécula, los fotones con frecuencia igual a la de la vibración “natural” de sus enlaces son absorbidos. Esto hace que las vibraciones moleculares sean excitadas a niveles energéticos más altos. La espectroscopía con IR emplea este hecho para analizar los espectros de luz recibidos al hacer pasar un rayo infrarrojo por la muestra: la absorción hace que para ciertas longitudes de onda la intensidad recibida sea pequeña comparada con la enviada. Estas “ausencias” de

IEL2-I-04-05
7
componentes permiten determinar la presencia de moléculas con tipos específicos de enlaces químicos (como grupos funcionales en compuestos orgánicos), pues cada uno de ellos tiene frecuencias específicas en las que absorbe energía.
1.3 EL EFECTO FOTOACÚSTICO. La espectroscopía fotoacústica es un tipo especial de espectroscopía de absorción en la que las muestras son iluminadas con luz infrarroja; pero a diferencia de ésta, la detección de sustancias no se realiza analizando el espectro de la luz que sale de la muestra sino observando los efectos que produce la luz al incidir en ella. Este hecho ofrece varias ventajas frente a sistemas más complejos, que aunque permiten realizar mediciones más completas (y a veces más precisas), presentan serios inconvenientes para este proyecto:
- No requiere de fuentes de poder tan grandes como en el caso de la NMR, en la que se necesitan campos magnéticos muy fuertes.
- Los detectores se reducen a simples micrófonos comerciales; no se requieren detectores infrarrojos costosos y complejos como en el caso de la FTIR (Fourier-Transform Infrared Spectroscopy), que necesita condiciones criogénicas.
- No se requiere una parte óptica tan compleja como en el caso de la FTIR y de la CW (Continuous Wave Infrared Spectroscopy), en las que se emplean monocromadores, interferómetros, lentes, espejos y otros dispositivos costosos y de manejo cuidadoso. En realidad, aunque este tipo de sistemas pueden emplearse en conjunto con celdas fotoacústicas para producir espectros de absorción (para dar forma a una “espectroscopía” como tal), no son necesarias para el funcionamiento que se está buscando con el proyecto.
- Las muestras no requieren una preparación especial para su análisis. No se necesitan condiciones de laboratorio para tener una operación correcta.
- El análisis de la señal acústica resultante no requiere de un analizador de espectro ni de un computador; puede llevarse a cabo con un circuito diseñado para ese propósito. Estas características permiten realizar un sistema de detección de gases flexible y de bajo costo, capaz de realizar mediciones “locales” (fuera del laboratorio) y sensitivas en un tiempo muy corto (inferior a un segundo) [3]. La detección fotoacústica se basa en la absorción de energía lumínica por parte de ciertas moléculas y la subsecuente detección de la onda de presión generada por la energía térmica que liberan al retornar a su estado base [2]. La gran eficiencia de la conversión de energía que ocurre en este tipo de procesos hace de esta técnica un método de gran sensibilidad. La siguiente ecuación da cuenta del proceso involucrado:
solventeentorno VTqqMM
MhM
∆→∆→+→∗
∗→+ ν

IEL2-I-04-05
8
Cuando se hacen incidir fotones de una longitud de onda específica (υ) sobre las moléculas en cuestión, se pueden excitar sus modos vibracionales y/o rotacionales: en este proceso de absorción, se excitan las moléculas a niveles de energía más altos (M*). Al retornar al estado base “M” (después de transcurrir cierto tiempo “τ”), liberan cierta cantidad de calor (q) que, por medio de la capacidad calorífica, produce un aumento en la temperatura del solvente circundante (∆Tentorno), y consecuentemente, dependiendo de su coeficiente de expansión térmica, una expansión volumétrica del solvente (∆Vsolvente). Si la excitación se realiza periódicamente, los cambios de volumen generan cambios periódicos en la presión del medio (que dependerán del coeficiente de compresibilidad isotérmica del solvente), que para el caso del aire constituyen una onda de sonido que puede detectarse con un micrófono [6]. Las ondas de presión generadas en este proceso están descritas por la siguiente ecuación [5]:
It
Kt
Kptc ea )()1( 2
22
2
2
2 ∂∂
−∂∂
=∇−∂∂
donde p es la onda de presión fotoinducida por la intensidad de la excitación lumínica (I), c es la velocidad del sonido en el solvente, Ka es un coeficiente relacionado con la absorción lumínica y Ke es un término que describe el fenómeno de “electrostricción” , que consiste en la constricción del solvente en la región con alto campo eléctrico cuando la energía electromagnética pasa a través de ese dieléctrico. En este caso, es necesario que el término de electrostricción sea lo más pequeño posible para que la onda de presión dependa únicamente de la absorción y brinde información confiable sobre concentraciones. Tal como se menciona en [3, 5], esto se puede lograr aumentando el ancho del pulso de excitación y/o el tiempo que tarda el sonido en recorrer el diámetro del volumen excitado de la celda. Este hecho se tendrá muy en cuenta en el diseño de la fuente de poder de la excitación lumínica, pues entre más ancho es el pulso, mejores resultados pueden obtenerse. Sin olvidar las implicaciones y los requerimientos que impone en el sistema, podemos descartar el término de electrostricción de la ecuación. Teniendo en cuenta que
pa C
AK β=
donde A es el coeficiente de absorción del solvente [5], β es su coeficiente térmico de expansión (°C-1), y Cp es la capacidad calorífica molar del mismo (J°C-1g-1), y realizando algunas aproximaciones, se llega a la siguiente expresión para la amplitud de la onda de presión resultante del efecto fotoacústico [5, 6]:
))((o
th
p VH
CP
ραβ
=∆

IEL2-I-04-05
9
donde α es la compresibilidad isotérmica del solvente (Pa-1), ρ su densidad (g/ml), Hth es la cantidad de energía absorbida (J) y Vo, el volumen excitado (ml). La ecuación implica que el cambio de presión es el producto de las propiedades termodinámicas del solvente y la densidad de energía absorbida. Cuando la intensidad de la excitación es lo suficientemente pequeña para que no exista saturación del estado alto de transición, y varía lentamente (en comparación con el tiempo que demora la transferencia de la energía absorbida a calor) [7], esta última ecuación puede relacionarse con la concentración del gas “absorbente” a través de la ley de Beer-Lambert [3,8]
alNPPPPH alNth 000 )10ln()101()( ⋅≈−=−∝ −
(siendo la aproximación válida para valores pequeños del exponente) donde P0 es la potencia de la luz incidente, P es la potencia no absorbida, a es la constante de absorbitividad (que puede ser determinada experimentalmente), N es la concentración de la sustancia absorbente y l, la longitud del trayecto a través del solvente. La proporcionalidad entre la energía absorbida (Hth) y la potencia absorbida (Po-P) puede establecerse a través de un tiempo “efectivo” de absorción de la potencia. Como la amplitud de la onda de presión es proporcional a la cantidad de energía absorbida, si se mantienen constantes las propiedades termodinámicas del medio, se llega a que
NP ∝∆ Teniendo en cuenta que en los micrófonos la amplitud del voltaje de salida es proporcional a la señal de presión (sonido) [5, 9] (a una frecuencia fija, como en este caso), se tiene que, para concentraciones de gas pequeñas (con las que sea válida la linealización de la ley de Beer-Lambert)
NVpp ∝ Así, para un diseño apropiado de celda fotoacústica, la amplitud del voltaje de salida del micrófono (Vpp) es directamente proporcional a la concentración del gas en el solvente en cuestión. Este resultado es la principal herramienta utilizada para desarrollar el detector de gas con este método.

IEL2-I-04-05
10
2. ESPECIFICACIÓN DEL PROBLEMA Y DE SU SOLUCIÓN
2.1 DETECCIÓN DE LA CONCENTRACIÓN DE AGUA EN EL AIRE. El efecto fotoacústico brinda la posibilidad de detectar una gran cantidad de gases en el ambiente, así que ¿por qué sólo restringirse a la detección de agua? Tal y como puede verse en las ecuaciones que describen el fenómeno, la detección de gases en condiciones ambientales obedece básicamente a la densidad de energía que es absorbida por la muestra (pues las variables termodinámicas del aire se mantienen iguales para todos los casos de detección en la celda). Esta absorción depende de la longitud de onda con que se ilumine (lo que permite identificar la presencia de un gas específico si se escoge una frecuencia en la que únicamente éste absorba energía), de la intensidad de la luz incidente (de acuerdo a la ley de Beer-Lambert) y de la capacidad de hacer que esa luz actúe en un volumen pequeño: todo esto se traduce en una mayor amplitud de la onda de presión fotoinducida, y consecuentemente, en un mayor voltaje a la salida de la celda. Así, si la intensidad de la luz que se emplea es lo suficientemente alta, no hay motivo por el que el cambio de la longitud de onda de la fuente lumínica no permita identificar otros gases diferentes: El diseño de la celda hace que la detección de un gas específico solo dependa de la longitud de onda de la fuente que se esté utilizando, por lo que el sensor puede ser modificado fácilmente para detectar uno diferente [11, 16]. Todo se reduce a enontrar una fuente de luz que emita en una frecuencia en la que la absorción sea específica del gas en cuestión. La elección de detección de agua tiene tres propósitos: (1) demostrar el funcionamiento de un sistema de detección de gases flexible, pues el comportamiento para otros compuestos es el mismo que para el agua; (2) aprovechar ciertas ventajas técnicas que brinda la banda de absorción tomada del agua, como lo son la disponibilidad de una fuente lumínica más potente y la presencia de ese gas en el aire común, que evita complicaciones en la demostración del funcionamiento de la celda; y (3), la importancia que para diversos procesos químicos y biológicos representa el conocimiento de la concentración de agua en el ambiente. En este último aspecto, es importante tener en cuenta que la humedad (junto a la temperatura) es una de las variables ambientales de mayor importancia, por lo que su determinación es indispensable en un grandísimo número de circunstancias: desde el confort humano hasta el comportamiento de los sensores bioquímicos, esta aproximación diferente a su detección puede ofrecer una alternativa a tener en cuenta cuando se busca una gran sensitividad (logrando ppm, partes por millón) y una facilidad de operación fuera del laboratorio. 2.2 ESPECIFICACIÓN DEL MÉTODO DE DETECCIÓN.

IEL2-I-04-05
11
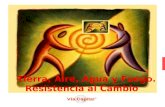
Teniendo en cuenta lo planteado por Barbieri en su trabajo [1], la celda que se utilizará en este trabajo emplea la resonancia de Helmholtz para detectar y amplificar la onda de sonido generada por la absorción periódica de luz. Este diseño presenta varias ventajas frente a otras disposiciones tradicionales: es simple, y a diferencia de las cavidades cilíndricas, no requiere de la excitación de los modos acústicos de la celda [1, 4]. Esto evita la necesidad de disposiciones precisas de la fuente lumínica - pues no se necesita controlar la divergencia del rayo ni la trayectoria que sigue dentro de la cavidad - y de las altas frecuencias de modulación propias de ese tipo de excitaciones, características que se traducen en una mayor flexibilidad en la elección de la fuente lumínica (no se necesita un láser) y una mayor simplicidad en su modulación, en la posible eliminación de los elementos ópticos adicionales que se puedan requerir para controlar la forma y disposición de la luz incidente (como espejos, lentes, etcétera), y en una elección más sencilla del transductor acústico-eléctrico; en pocas palabras, permiten que el diseño del sistema sea más sencillo y que se puedan obtener las particularidades buscadas. Además, con la inclusión de una cavidad adicional, se puede construir un filtro pasabajas que aisla el sistema de ruidos externos y aumenta la relación señal/ruido, ampliando así el límite inferior de detección del dispositivo y dando una ventaja adicional frente a otras configuraciones. El principio de funcionamiento es el siguiente [1, Fig. 1]: La luz modulada (en amplitud) a una frecuencia específica (f) se hace incidir en la primera cámara (el filtro), de tal manera que se “fotoinduce” una onda de presión en ella (que depende de la concentración). Esta onda entra al canal que comunica las dos cavidades y fuerza oscilaciones de presión en la segunda cámara, que actúa como resonador de Helmholtz (que debe estar diseñado para resonar a la frecuencia de modulación f, pues debe responder al sonido fotoinducido y no al ruido externo). Por último, este sonido filtrado y amplificado incide en el micrófono (que se debe encontrar dentro de la cavidad) y permite la detección del gas en cuestión. Así, dado que la onda de presión es generada dentro de la primera cavidad, el filtro pasabajas no afecta su generación: únicamente filtra el ruido proveniente del exterior. Además, como la resonancia no depende de la excitación de los modos acústicos de la cavidad, la luz proveniente de la fuente puede presentar una gran divergencia sin comprometer el funcionamiento.
Fig. 1 Con base en las ecuaciones planteadas en el Marco Teórico, se puede hacer un estimativo del voltaje obtenido en los terminales del micrófono para diferentes valores de energía absorbida: en condiciones normales de temperatura y presión el aire, se tiene que Cp= 1010

IEL2-I-04-05
12
J°K-1kg-1 y ρ = 1.21 kg/m3; asumiendo que en ese caso el aire se comporta como un gas ideal, puede demostrarse [10] que α =1/P (donde P es la presión, en Pa) y β=1/T (T es la temperatura, en °K); además, asumiendo el volumen de excitación lo más grande posible (como el volumen de toda la cavidad que actúa de filtro pasabajas, V0 = 7.068*10-6m3, que se explica más adelante), se obtiene
thth H
TP
mH
mkg
KkgJT
PP 76.115)10068.7
)()21.1)(1010(
( 36
3
=⋅
°
=∆ −
Puede verse claramente que las variaciones de la señal de sonido con la presión y la temperatura son bajas en condiciones normales, pero que pueden alterar significativamente los resultados si llegan a alejarse mucho de ellas; además, las variables ambientales pueden producir variaciones en la absorbancia [7] que inciden directamente en la energía absorbida. De todas formas, estos problemas son despreciables en condiciones normales de operación y pueden eliminarse completamente realizando recalibraciones periódicas. Teniendo en cuenta que la sensitividad típica de un micrófono electret es de –53 dBV (2.2mV/Pa) a 1000Hz, que el resonador de Helmholtz amplifica la onda de presión en un factor de 100 (según el teórico que se explica más adelante), y reemplazando con P=71765 Pa (en Bogotá) y T=300°K, es de esperarse que el voltaje a la salida del micrófono (en voltios) sea
thth HHV ⋅=⋅= − )2.6092()300
71765)(76.115)(100)(102.2( 3
Si se tiene en cuenta que el sistema eléctrico opera con señales del orden de milivotios, ¡la detección sólo requiere de la absorción de unos cuántos microjulios de energía electromagnética! Este cálculo se realizó asumiendo la utilización de un micrófono de tipo electret; esta elección no es arbitraria, pues presenta una de las mejores sensitividades y disponibilidades del mercado. Según [9], la sensitividad - definida como el voltaje que produce en el micrófono la incidencia de una onda de presión de un Pascal - del tipo “condensador” (como lo es el electret) es solo superada por la del tipo “carbón” y se adapta mejor a las dimensiones de la celda fotoacústica. Se tiene así que el efecto fotoacústico permite identificar la absorción de haces de diferentes longitudes de onda a través de la amplitud de la señal de voltaje saliente del micrófono, pues ésta es proporcional a la absorbancia (en valores pequeños) de la muestra en consideración. Si se realiza un barrido en frecuencia de la luz, es posible construir su espectro de absorción, y por medio de este, se puede inferir la composición de la muestra. Sin embargo, este proyecto requiere detectar un único gas. ¿Qué pasaría si se pudiera encontrar una banda estrecha de frecuencias en la que sólo el gas en cuestión absorbiera radiación? Si se excitara la muestra con luz con ese contenido de frecuencias, el efecto fotoacústico sólo se debería a la presencia del gas buscado y se podría deducir su concentración directamente del voltaje obtenido en el micrófono. Esto permite dejar de lado la necesidad de obtener espectros “completos”, con lo que se puede prescindir de los barridos en frecuencia de la luz incidente y todo lo que ello implica:

IEL2-I-04-05
13
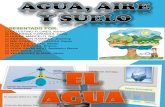
tanto las rejillas de difracción, los interferómetros y los láseres sintonizables salen de los requierimientos y permiten reducir los costos, el tamaño, y la necesidad de equipamiento de laboratorio para manejarlos. La detección del gas requiere entonces encontrar una fuente de luz que emita radiación electromagnética en una banda muy estrecha alrededor de una frecuencia de absorción fuerte y conocida del gas en cuestión. Para el caso del agua, existe una banda de absorción estrecha alrededor de 1.9 µm que no es común a otros componentes del aire [11, Fig. 2]; para otros gases pueden buscarse bandas específicas en libros especializados y bases de datos en Internet (son de fácil acceso).
Fig. 2 Teniendo la longitud de onda que debe tener la luz incidente para identificar agua, ahora es preciso elegir el tipo de fuente. Para obtener una banda estrecha, existen básicamente dos posibilidades: (1) emitir luz con esa característica, cosa que se puede lograr con láseres o LEDs, o (2) emitir luz con un contenido de frecuencias grande y luego filtrarlo para que incida sobre la muestra únicamente la banda de interés. Esta última opción tiene varias posibilidades de realización pero presenta serias desventajas por las pérdidas de potencia en las que se incurre al emplear dispositivos ópticos (es necesario recordar que la amplitud del sonido depende de la potencia de la excitación); además, en caso de emplearlos, los filtros pasabandas ópticos son costosos y frágiles, y su banda de paso es generalmente muy ancha para evitar la excitación de otros gases en la muestra [para ver una lista de precios, ir a http://www.barr-associates-uk.com/Available%20Filters%20List.htm]; las rejillas de difracción requieren arreglos muy precisos para poder seleccionar longitudes de onda específicas y se vuelven intolerables en operaciones fuera del laboratorio. Adicionalmente, dado que las fuentes infrarrojas se basan en la radiación de cuerpo negro, las altas temperaturas con las que funcionan son difíciles de aislar y la modulación debe realizarse con dispositivos externos (como hélices), pues no es posible calentar y enfriar los filamentos con una rapidez suficiente. La mejor alternativa es el empleo de láseres, pues su luz coherente es muy potente y muy “pura” (tiene un contenido de frecuencias muy bajo). En la gran mayoría de trabajos de detección fotoacústica se emplean por estos motivos [1, 2, 3, 4, 7] (para ver diferentes resultados de detección fotoacústica de gases con láseres, ver [3]). Sin embargo, no todos los láseres se acomodan a nuestras exigencias: los de CO, CO2, HeNe y QCL (láseres de

IEL2-I-04-05
14
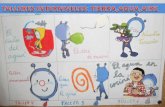
cascada cuántica) requieren unidades de control grandes que no permiten dar la flexibilidad de transporte buscada para el sistema. Para láseres pequeños, es necesario considerar un tipo especial: los LD (diodos láser, por su sigla en inglés). Estos presentan todas las características buscadas en la fuente de luz (a excepción de los fabricados con sales de plomo, que requieren condiciones de operación criogénicas): potencias de emisión del orden de mW (milivatios), luz de gran pureza y funcionamiento fuera del laboratorio. Además, permiten una modulación eléctrica en la alimentación, cosa que representa una reducción adicional en la complejidad del sistema y elimina la necesidad de partes móviles que pueden introducir ruidos mecánicos y mostrar inconvenientes en operaciones de campo. El problema: las longitudes de onda necesarias para la absorción en el infrarrojo no son comerciales, por lo que los LDs buscados deben mandarse a fabricar. El resultado: U$ 2000 por unidad. Es acá donde entran a considerarse los LEDs infrarrojos. Aunque no existen disponibilidades comerciales significativas, el precio es una fracción del de los láseres. ¿Lo que se sacrifica? Principalmente potencia, pureza y directividad. De todas formas, existen configuraciones que permiten emisiones colimadas (con rayos prácticamente paralelos) del orden de milivatios y con anchos de banda lo suficientemente pequeños para no excitar gases diferentes al buscado. Esto los convierte en la opción a tener en cuenta para el sistema y es la justificación de su utilización en el proyecto. 2.3 ARQUITECTURA DE LA SOLUCIÓN DEL PROBLEMA. El sistema tiene como entrada una muestra de aire del ambiente, y como salida, datos sobre la concentración del gas buscado (vapor de agua). Para lograr este objetivo, se requiere de varios procesos que pueden ubicarse en un diagrama de Pirbhai-Hatley para definir una arquitectura general del sistema:
Fig. 3 Con esta se busca organizar la solución del problema asignando las funcionalidades generales que deben ser trabajadas para lograr la forma de operación buscada.

IEL2-I-04-05
15
2.4 DEFINICIÓN DE TAREAS. La asignación de tareas se realiza de acuerdo a las funciones buscadas en la arquitectura del sistema; en cierto modo, vuelve más específico el llevarlas a cabo. Para ello, se subdividen los diferentes procesos en “pasos” y se define un “recorrido” para que la información sea extraída en forma adecuada; las diferentes tareas definen qué se debe hacer y cuándo para cumplir la funcionalidad buscada. El cómo debe hacerse depende de la complejidad de la tarea y de sus requerimientos (este punto se trabajará en la sección de “Diseño”). Estas son las tareas que deben realizarse en el sistema:
Fig. 4 - Generación y modulación de luz: Para lograr el efecto fotoacústico y detectar un gas
específico, es necesario emitir una onda electromagnética de ancho de banda pequeño (en el que se sepa que la absorción solo es debida al gas en cuestión) y modularla en amplitud (“prenderla y apagarla”) a una frecuencia audible.
- Generación de la señal fotoacústica: La absorción de la luz modulada debe realizarse en un ambiente sellado de variables termodinámicas fijas para producir ondas de presión de amplitud proporcional a la concentración del gas buscado (ver Marco Teórico).
- Acondicionamiento de la señal acústica: Para evitar ruidos indeseados y amplificar la onda de presión producida por la absorción de la luz modulada, debe hacerse un tratamiento de la señal acústica.
- Transducción acústica-eléctrica: El sonido debe ser transducido a una señal eléctrica para hacer el procesamiento de la información. Aunque ya en esta etapa debe haberse trabajado la señal acústica, la sensitividad de esta tarea (del micrófono) debe ser alta para lograr mayores voltajes con amplitudes de presión más pequeñas [9]. Esta característica lo hace ser uno de los procesos que mayor impacto tiene en el desempeño del sistema.
- Acondicionamiento de la señal eléctrica: Debe hacerse una preamplificación y filtraje de la señal proveniente del transductor para reducir aún más la probabilidad de incurrir en errores debido a ruidos y/o sonidos indeseados que vengan del bloque de procesamiento de

IEL2-I-04-05
16
entrada. Además, la señal debe ser modificada para que pueda ser entendida y trabajada en el cálculo de la concentración; la mejor manera de hacerlo es extrayendo su valor RMS, pues éste es proporcional a la amplitud.
- Traducción de voltaje a concentración: A partir de la relación encontrada entre voltaje y concentración, se generan los valores de concentración de gas correspondientes a los voltajes digitalizados del acondicionador eléctrico. Esta tarea debe realizarse de acuerdo a los datos de calibración puestos por el usuario en la interfaz.
- Dar formatos de salida: Los valores determinados de concentración se trabajan para poder ser enviados al LCD.
- Control de Proceso: Da el orden necesario de ejecución de las tareas, activándolas cuando se necesitan y permitiendo que la traducción se haga siguiendo el proceso establecido con esta “división”.
- Captura de datos y señalización de estado: permiten que el usuario configure y sepa que está pasando con el sistema en cualquier momento que lo desee.
- Alimentación: Debe suministrar las diferentes tensiones y corrientes requeridas por el sistema sin presentar caídas ni picos que puedan alterar su normal funcionamiento.

IEL2-I-04-05
17
3. DISEÑO DEL SISTEMA
A partir de las tareas propuestas puede plantearse un diseño general de bajo nivel que cumple la funcionalidad buscada para el sistema. En él se pueden identificar componentes específicos que dan forma a un dispositivo completo:
Fig. 5 Aunque en algunos casos aparecen integradas varias tareas en un solo componente y en otros una sola tarea se desarrolla con varios componentes, el diseño mostrado es el resultado del análisis de varios planteamientos: Este es el que, en términos generales, ofrece un menor tamaño y una mayor flexibilidad de costos, pruebas, calibración y transporte.
3.1 CELDA FOTOACÚSTICA. Como se mencionó anteriormente, el método de detección se basa en el empleo de la resonancia de Helmholtz: mediante un correcto diseño de la cámara que actúa como resonador (que puede ser considerado como un filtro pasabandas de segundo orden acoplado a un amplificador), pueden escogerse una frecuencia de resonancia y un factor de calidad específicos para ella. Si se hace que la frecuencia de modulación de la luz incidente tenga el valor de la resonancia de la celda, el sonido fotoinducido será seleccionado y amplificado, llevando a una detección más fácil y fiel en el micrófono (que debe estar dentro del resonador para aprovechar este hecho). El resonador de Helmholtz consiste en una cavidad rígida que encierra un volumen “V” y se comunica con el medio externo a través de una pequeña abertura de radio “a” y longitud “l” [Fig. 6].
Fig. 6

IEL2-I-04-05
18
De acuerdo a [9], si se asume que la única pérdida de energía es la que resulta de la radiación del sonido hacia el exterior de la cavidad, la ecuación diferencial que describe el desplazamiento (x) del gas presente en la abertura (de sección transversal “S”) de un resonador de este tipo cuando incide en ella una onda de presión armónica de amplitud P y frecuencia angular ω es
tjSPexV
ScdtdxSck
dtxdSl ωρ
πρ
ρ =++22
022
02
2
0 2'
donde ρ0 es la densidad del gas en equilibrio, c es la velocidad de propagación del sonido, k es el número de onda, V es el volumen encerrado por la cavidad (sin importar la forma que tenga, aunque en este caso se trabaje con uno cilíndrico) y l’ depende de la forma de la abertura y cumple la desigualdad (ver [9])
allal 7.1'2.1 +≤≤+
Este sistema lineal de segundo orden tiene una frecuencia de resonancia (f0) y un factor de calidad (Q) dados por
VlScf'20 π
= 3
3)'(2S
VlQ π=
Como se quiere diseñar un resonador con especificaciones determinadas, se despejan l' y V en función de la frecuencia de resonancia (f0) y del factor de calidad (Q): reemplazando para f0=1 KHz, Q=100 (la escogencia de estos valores se realizó con base en los resultados obtenidos en [1]) y c= 360 m/s, y asumiendo un orificio de diametro igual a 1/4", se obtiene
3510182.1 mV −⋅= mml ]0.5,4.3[∈ (l'=8.8mm) Asumiendo una profundidad (h) de 25mm, el volumen de la cavidad (cilíndrica) del resonador requiere un diámetro (d) de 24.5mm. Al igual que con el agujero de la constricción, se aproximan los valores de los parámetros a valores más fáciles de realizar durante la construcción. Para ello, se toman las siguientes dimensiones:
l=5 mm h=25 mm d=24 mm El resonador construido a partir de ellas tiene, teóricamente (reemplazando en las ecuaciones correspondientes), las siguientes características:
Hzf ]0.1021,1.940[0 ∈ ]7.125,0.98[∈Q De acuerdo a [9], la onda de presión es proporcional a la de desplazamiento. Por ese motivo, puede demostrarse que la amplificación de la onda de presión en la frecuencia de resonancia equivale a Q, y la cavidad debe estar en capacidad de hacer que la onda de

IEL2-I-04-05
19
presión dentro de ella tenga una amplitud aproximadamente 100 veces mayor a la de la onda de sonido incidente en la abertura. Cuando se entra a tener en cuenta la forma de la cavidad, aparecen otras frecuencias de resonancia del sistema. Sin embargo, éstas son mucho más grandes que la fundamental, pues resultan de la formación de patrones de ondas estacionarias dentro del volumen encerrado en vez de a movimientos oscilatorios de la masa de gas de la abertura [9]. Esta característica permite descartar los efectos que puedan llegar a tener los armónicos en la detección y es una razón de peso para considerar este tipo de dispositivos en el proyecto. En lo que se refiere al filtro pasabajas, se emplea uno de tipo “cámara de expansión” inmediatamente antes de la abertura del resonador [Fig. 7]. Tal y como se sugiere en [1], este arreglo permite reducir el ruido externo que puede insidir en la celda (aumentando así la relación señal/ruido) sin sacrificar eficiencia en la detección, pues la señal de sonido fotoinducida se genera dentro de la cavidad del filtro y no es atenuada. El filtro tiene la siguiente forma:
Fig. 7 donde S1 es el área transversal del tubo de salida (que en este caso es igual a la de la abertura del resonador), S2 es el área transversal de la expansión y L, su longitud. En este caso es preciso atenuar todo el sonido que llega del exterior de la cámara, por lo que se elige una frecuencia de corte pequeña. Teniendo en cuenta que la atenuación del sonido (definida como la razón entre la amplitud de las ondas de presión entrante y saliente) cumple la siguiente relación (ver [9])
2
1
2 )(1
1
cSfLS π
α+
=
(c es la velocidad del sonido), para una cámara cilíndrica de diámetro igual a 30 mm y longitud 10 mm se tiene una frecuencia de corte aproximada (cuando la atenuación llega a 0.5) de 513.4 Hz. El tubo de entrada al filtro es el soporte en el que se encuentra la fuente de luz; esta disposición elimina la necesidad de una parte óptica adicional (con lentes, ventanas o espejos), y permite que la luz infrarroja proveniente del LED incida directamente en la cavidad del filtro para que se produzca la onda de sonido que excita al resonador y permite la detección de agua. Al unir el el soporte, el filtro y el resonador, se obtiene la celda completa que se muestra a continuación (y anexa, para una mayor claridad). En la tapa de sellamiento del resonador (que está conformado por el tubo del medio y la cavidad cilíndrica vista a la derecha) se

IEL2-I-04-05
20
aprecia un pequeño micrófono electret [1, 9]. Este es el dispositivo que sirve como transductor y convierte la señal de sonido en una señal de voltaje.
Fig. 8 Las aberturas que se ven en el tubo de entrada y en la tapa de sellamiento son las terminales del flujo, esto es, por donde se hace entrar y salir el aire de la cavidad. Como se explica en [4], el gas de la celda puede salir por estos canales en vez de contribuir a la señal de presión, afectando el comportamiento del sistema. Sin embargo, el empleo del resonador de Helmholtz ayuda a reducir estas desviaciones con sus características de resonancia, por lo que un correcto maquinado debe impedir una desviación pronunciada del esperado teórico. 3.2 CIRCUITO DE ALIMENTACIÓN Y MODULACIÓN DE LUZ. La modulación de la fuente lumínica se realiza generalmente con una pequeña pantalla giratoria que deja pasar o no luz con una frecuencia controlada y preestablecida. Sin embargo, en el caso de los LEDs, puede realizarse con su misma fuente de alimentación alternando la entrega de corriente necesaria para su operación con “cortes” (consiguiendo así una modulación con una frecuencia y un ciclo de trabajo específicos). Los LEDs tienen una variación casi lineal de la potencia de salida con la corriente suministrada [13], por lo que su circuito manejador debe suministrar corrientes constantes durante cierto tiempo, corrientes nulas durante otro tiempo, y repetir este ciclo indefinidamente. De la característica de potencia-corriente del Led 18 de la compañía Boselec (que se utilizará debido a su banda estrecha alrededor de 1.9 µm), puede verse que para obtener 1 mW de potencia promedio en la luz saliente deben utilizarse pulsos de 0.5 A con un ciclo útil de trabajo del 50% (hecho que además ayuda a eliminar el problema de electrostricción, como se vio en el Marco Teórico). Aunque teóricamente pueden emplearse potencias más bajas, este valor coincide con el orden de magnitud empleado por varios grupos que han trabajado en este tema (ver [1]). La fuente de alimentación modulada consiste entonces en una fuente de corriente que produce pulsos de 0.5 A con la frecuencia de resonancia de la celda fotoacústica (aproximadamente 1000 Hz) y con un ciclo útil del 50%. La arquitectura general del circuito es la siguiente:

IEL2-I-04-05
21
Fig. 9 Como la fuente debe ser capaz de entregar corrientes de valores grandes, se emplea la configuración sugerida por [12] para fuentes de corriente controladas por voltaje y se conecta a su entrada un circuito astable que genera pulsos rectangulares de voltaje con las características buscadas en frecuencia y ciclo útil. Con esto se consiguen pulsos de corriente en la sección de la “carga” que no dependen de la caída de potencial que ésta presente (excepto si es lo suficientemente grande como para producir una saturación del transistor o del amplificador operacional). El principio de funcionamiento es el siguiente: la conexión con realimentación negativa del amplificador operacional asegura que el voltaje aplicado en su entrada no inversora sea “puesto” en el emisor del transistor; así, se hace fluir una corriente hacia el emisor del pnp con un valor determinado por la diferencia entre el voltaje de alimentación positivo y el puesto en el pin no inversor (que puede ser manejado a gusto). Como la corriente de la base es pequeña, la corriente proveniente del emisor se fuerza hacia la carga conectada al colector. El control por medio de voltaje se aprovecha con una conexión a un circuito oscilador sencillo con frecuencia ajustable cercana a 1000Hz (por medio de R25, para permitir calibraciones en el montaje definitivo) y ciclo de trabajo del 50%. Éste es fácilmente realizable a partir de un 555 (ver [12]), y permite obtener una alternación de 5V y 0V: como la alimentación de la fuente de corriente está a 5V, se obtienen corrientes nulas en los ciclos altos de la oscilación y corrientes de 0.5 A (si se elige una resistencia de 10Ω) en los bajos. El circuito de alimentación y modulación es el siguiente:
Fig. 10 Es preciso garantizar que la corriente de base sea inferior a la máxima que el operacional pueda aceptar; este hecho motiva el empleo del transistor pnp de potencia tipo Darlington (el TIP 127) en la fuente de corriente.

IEL2-I-04-05
22
3.3 AMPLIFICACIÓN, FILTRAJE DE LA SEÑAL ELÉCTRICA Y CONVERSIÓN A VOLTAJE RMS. Es un circuito conformado por un preamplificador, un filtro activo (que permite eliminar el ruido eléctrico y aumentar la selectividad de la señal fotoinducida), un conversor del valor RMS de una señal periódica a DC y un amplificador de ese voltaje (pues los circuitos integrados “true RMS” comerciales solo entregan resultados hasta 200mV). Como la amplitud de la señal eléctrica es proporcional al valor rms, se obtiene a su salida un valor DC de la amplitud de la señal del micrófono (que a su vez da un valor proporcional a la concentración del gas buscado) que puede ser digitalizado para realizar el procesamiento correspondiente. La arquitectura general del bloque es la siguiente:
Fig. 11 - Preamplificador: Consiste en un amplificador de instrumentación (AD620) conectado de
la manera sugerida en su datasheet (de Analog Devices) para disminución de interferencia electromagnética. Sus entradas diferenciales se conectan a la referencia del sistema y a la salida del micrófono; la amplificación se selecciona con el valor de resistencia puesto entre los pines 1 y 8 (por medio de un potenciómetro tipo trimmer), y permite tener valores de ganancia entre 1 y 1000, suficiente para trabajar la señal proveniente de la celda fotoacústica (teniendo en cuenta que no se pueden sobrepasar 200mVrms a la entrada del circuito conversor). El empleo de un amplificador de este tipo se realiza con el objetivo de obtener un rechazo en modo común elevado para evitar que posibles ruidos en la referencia afecten el comportamiento del sistema.
- Filtraje: Para aumentar la razón señal/ruido del sistema y “refinar” la señal eléctrica producida por el efecto fotoacústico y el micrófono (además de reducir el efecto de interferencias indeseadas que puedan presentarse), se adiciona un filtro pasabandas activo de segundo orden con frecuencia de resonancia “f0” de 1KHz (de acuerdo a los diseños de la celda y del modulador) y factor de calidad “Q” de valor 2π después de la etapa de preamplificación.
Fig. 12

IEL2-I-04-05
23
De acuerdo a la topología sugerida en [12, Fig. 12] para filtros de banda angosta, se escoge una ganancia de 1 y un valor de capacitancias (C) de 0.1µF. Con estos valores, se despejan R1, R2 y R3 de las siguientes ecuaciones:
Ω=Ω≈Ω=⇒=−
== kRRkRRRfCQ
QR
fCQ
R 20,130,102,)2()12(
,)2( 32113
022
01 ππ
Estos son los valores que se adicionan al circuito. Para permitir ajustes en el montaje definitivo, R3 se reemplaza por una resistencia de 15kΩ conectada en serie con un potenciómetro trimmer de 10kΩ; con esta disposición se pueden realizar calibraciones de la frecuencia de resonancia según la respuesta real del resonador de la celda.
- Conversión RMS a DC: Para poder generar una señal provechosa a la salida del bloque, es necesario extraer la amplitud (que es proporcional al valor RMS) de la señal eléctrica. Esto se logra con el circuito integrado AD636 de Analog Devices: empleando la configuración estándar con post-filtraje sugerido en el “datasheet” del dispositivo, se obtiene a su salida una señal DC con bajo riple, tiempo de estabilización (del 1%) de aproximadamente 115 ms (empleando un condensador ponderante de 1µF y un condensador de filtro de 4.7 µF) y valor de tensión equivalente al valor RMS de la señal que sale de la etapa de filtraje. - Amplificación de la señal DC: Empleando la misma configuración utilizada en la etapa de preamplificación, se conectan las entradas diferenciales a la referencia (tierra) y al valor DC obtenido con la conversión. Con esto se consigue realizar una amplificación de ganancia ajustable entre 1 y 1000 para ser entregada al conversor análogo-digital. Esta información permite deducir la amplitud de la onda de presión presente en el resonador, y consecuentemente, permite calcular la concentración de agua en el aire que se encuentra dentro de la celda. El esquemático del circuito completo de tratamiento de la señal eléctrica se muestra a continuación [Fig. 13]. En él pueden observarse las conexiones descritas anteriormente, así como algunos condensadores adicionales que sirven de filtro para la alimentación entregada a los diferentes sub-bloques (VCC_CIRCLE se refiere a –5V y VCC_ARROW, a 5V). También pueden observarse algunos componentes antes de la preamplificación; éstos hacen la función de alimentación y acople al micrófono electret, que es estándar a todas las conexiones con este tipo de micrófonos.

IEL2-I-04-05
24
Fig. 13 3.4 CONTROLADOR Y VISUALIZACIÓN. Debe ocuparse de traducir los datos digitales de voltaje RMS a la concentración del vapor de agua de acuerdo a la calibración realizada por el usuario (con la interfaz del sistema), y debe entregárselos a la unidad de manejo del display de cristal líquido para poder hacer accesible el resultado a los usuarios. Como el voltaje DC obtenido del tratamiento de la señal eléctrica varía de manera lineal con la concentración del gas en cuestión (en el rango de operación establecido), debe realizarse un programa de traducción que incluye la ejecución de ciertas operaciones aritméticas (sumas, multiplicaciones, restas y divisiones). La evaluación de la viabilidad de diferentes alternativas para su implementación (microcontroladores, DSPs, PCs, etcétera) favoreció la elección del microcontrolador PIC-16F877A por varias razones:
- Es barato y fácil de conseguir. El software para la compilación de los códigos en assembler es de libre acceso y los programadores están disponibles en el laboratorio.
- Su tamaño lo hace ideal para la aplicación que se está buscando. Para hacer mediciones fuera del laboratorio es injustificable emplear un PC o conectar una tarjeta de DSP cuando pueden ser evitados.
- Tiene incorporado un conversor análogo-digital de 10 bits que se adapta a las exigencias de la solución: la ley de Beer-Lambert impone la restricción de tener que emplear concentraciones de gas pequeñas para poder hacer la correspondencia lineal con los voltajes

IEL2-I-04-05
25
producidos en el micrófono; este hecho impone un límite superior de aproximadamente 10000 ppm para el dispositivo (ver [1, 2, 7]). Por otra parte, aunque teóricamente el efecto fotoacústico permite detecciones de concentraciones del orden de ppb, en este caso (para aplicaciones prácticas) no será necesario bajar de 1 ppm. Aunque este límite es difícil de alcanzar (ver [1]), define un rango útil de 1 ppm-10 000 ppm. Teniendo en cuenta que, en general, precisiones de 10 ppm son útiles para aplicaciones de propósito general, un conversor Análogo-Digital de 10 bits (con 1024 pasos) es el más conveniente para la implementación. Como el ADC está en el mismo circuito integrado, se descarta la necesidad de comprar y conectar un circuito integrado de esas características al controlador. Esto permite que las conversiones se realicen a través de instrucciones, ahorrando posibles fallas por mayor número de componentes y dando la posibilidad de evaluar su comportamiento a través de simulaciones en computador.
- Tiene una memoria E2PROM que permite guardar permanentemente (sin necesidad de tener una fuente de poder conectada) los datos calculados de las calibraciones y evita tener que rehacerlas cada vez que se enciende el sistema.
- Dado que los cálculos no requieren de una alta velocidad para ser realizados, no se justifica el paralelismo de los DSPs; eligiendo una aritmética de punto fijo, pueden hacerse cálculos de gran precisión en un dispositivo pequeño y de fácil manejo.
- Por ser de amplia utilización, el estándar PIC de Microchip hace posible realizar interconexiones sencillas con otro tipo de dispositivos (como, por ejemplo, con manejadores de LCD). Estas características permiten incorporar en un único dispositivo algunas tareas que de otra manera requerirían circuitos adicionales. Esta disminución de complejidad del “hardware” se traduce en un mayor trabajo de “software”, hecho que es muy ventajoso si se tiene en cuenta que es más fácil de modificar y permite realizar simulaciones más completas desde un computador. El microcontrolador permite entonces realizar el control de las tareas del sistema completo (cumpliendo la labor de “Control de Proceso”), activando los diferentes procesos en el momento en que son requeridos y realizando aquellos para los que es apto (como la conversión análoga-digital, la captura de datos del teclado, los cálculos aritméticos, etcétera) según un procedimiento específico que puede representarse mediante el siguiente diagrama de estados [Fig. 14]:

IEL2-I-04-05
26
Fig. 14 Los estados mostrados se describen a continuación: 1. Configuración inicial del controlador: Para poder obtener la funcionalidad buscada, es
necesario realizar una configuración inicial que indique cuál entrada del “chip” se va a tomar como entrada del ADC, cuál va a funcionar como su referencia, qué puertos se van a trabajar como entradas digitales, cuáles como salidas y qué características va a tener el timer (teniendo en cuenta que se emplea un cristal de 4MHz).
2. Lectura de los datos de la memoria no volátil: se leen los datos calculados en la anterior calibración para pendiente, ordenada al origen y voltaje empleado en la referencia del ADC. Los dos primeros son números de punto fijo de 3 bytes, organizados de la siguiente manera: 2 bytes para parte entera y 1 para parte decimal; con esto se busca realizar cálculos que arrojen resultados precisos entre 0 y 9999 (los decimales se descartan en la visualización pero se trabajan durante todo el tiempo para evitar errores de redondeo significativos). El “voltaje de referencia” es un número de un byte que especifica los valores que se aplican a las entradas de un conversor digital-análogo (el DAC0830 de National Semiconductor) cuya salida es el voltaje de referencia del conversor análogo-digital del PIC; esta característica se emplea en las rutinas de auto-amplificación de voltaje y auto-rango, como se explicará en seguida.
3. Realización de la rutina de autorrango, en la que se hace la conversión análoga-digital del voltaje. Para no perder resolución con valores de voltaje pequeños, se revisa si el valor de la conversión es inferior a la mitad del máximo. En caso que así sea, se divide el “voltaje de referencia” por 2 para amplificar el voltaje al doble y ganar una cifra significativa en el bit menos significativo. Se revisa de nuevo y se repite el procedimiento en caso que el voltaje sea inferior a la mitad. Con este procedimiento se pueden mantener resoluciones de 10 bits para 3 rangos diferentes, ganando precisión cuando los voltajes pequeños lo necesiten y ahorrándola cuando sean grandes y no valga la pena aumentar la complejidad de los cálculos.
4. Cálculo de la concentración a partir del valor de voltaje obtenido: Con los datos de pendiente y ordenada al origen leídos de la memoria (o recién recalibrados) se realiza el cálculo de la concentración haciendo n=m*v+b (debe tenerse en cuenta que cada variable es un número de punto fijo de 3 bytes). Este procedimiento se basa en los

IEL2-I-04-05
27
resultados obtenidos en el Marco Teórico (el voltaje varía de forma lineal con valores pequeños de concentración).
5. Envío de los datos al adaptador de LCD para poder ser mostrados: Comenzando con la conversión del resultado de concentración a BCD, se realiza una conversión de dígitos a secuencias de “encendidos y apagados” de sus segmentos correspondientes en el LCD y una rutina de envío serial de acuerdo a las especificaciones del circuito integrado AY0438 (de Microchip) para poder visualizar la concentración calculada.
6. Revisión del teclado que sirve de interfaz con el usuario para ver si hay una solicitud de calibración (si el botón “B” está oprimido). En caso que haya, se debe seguir al siguiente paso (7); si no, debe volverse al punto 3 para que las traducciones voltaje-concentración se repitan y se refresquen continuamente durante la operación del dispositivo.
7. Adquisición del primer dato de concentración: Con el empleo de un manejador de teclado de 4x4 (el circuito integrado 74C922) se obtiene el valor binario de la tecla oprimida y una línea de “dato válido” que se mantiene activa hasta que no se suelte. Cada vez que hay un “dato válido”, se mueven las entradas anteriores una posición a la izquierda; si se sobrepasa el límite de 4 dígitos, se descarta el más significativo y se introduce el nuevo por la derecha. Una vez se oprime “Enter” (la tecla “A”), se realiza la conversión del valor BCD introducido al formato binario, punto-fijo, de 3 bytes.
8. Amplificación del voltaje hasta lograr un valor de conversión acorde a la concentración obtenida en el paso anterior (7): Con el objetivo de evitar la complejidad en la calibración de hardware y de no realizar cálculos que carezcan de sentido por la falta de exactitud de los operandos (pues no tiene sentido comparar una concentración de diez bits con un voltaje de uno), se divide la referencia del ADC por 2 (amplificando el valor del voltaje por ese mismo factor) hasta tener como mínimo una distancia de 3 bits entre los bits más significativos de estas dos variables. Una vez realizada la “auto-amplificación”, se realiza la conversión definitiva del voltaje correspondiente a la concentración tecleada por el usuario.
9. Adquisición del segundo dato de concentración y de su correspondiente voltaje: Se toma el segundo dato de concentración de la misma forma que el primero, y empleando la referencia de voltaje obtenida en el punto anterior, se realiza la conversión del voltaje análogo correspondiente a la concentración ingresada.
10. Calcular la nueva pendiente y la nueva ordenada al origen. Con la información obtenida en los tres estados anteriores (7, 8 y 9), se calculan los parámetros de la ecuación de la recta (pendiente y ordenada al origen) que pasa por las dos parejas ordenadas de (concentración, voltaje).
11. Los datos de pendiente (m), ordenada al origen (b) y voltaje de referencia se guardan en la memoria E2PROM para que estén disponibles en operaciones posteriores y se vuelve a (3).
Este es el programa básico que sigue el microcontrolador. En el código completo (que se encuentra en la sección de “Anexos”) puede observarse la implementación de esta rutina en

IEL2-I-04-05
28
el assembler correspondiente (debidamente comentada), así como algunas adicionales que dan indicaciones al usuario, otras que evitan el ingreso de datos inconsistentes y algunas que protegen al sistema de posibles errores que puedan presentarse durante la ejecución del programa. Como se mencionó en la descripción de los estados, el adaptador de salida es un circuito manejador de LCD: el AY0438 de Microchip, que solo necesita un condensador de 33pF para producir las señales de control de la pantalla. Éste recibe serialmente valores binarios para encender (con 1) o apagar (con 0) cualquiera de 32 segmentos de una pantalla de cristal líquido (LCD) arbitraria: guardando los datos en sus registros de corrimiento, envía una señal desfasada en 180° con respecto a la señal común aplicada al “backplate” para los “encendidos” y una en fase para los “apagados”. Mediante una conexión y un formateo correctos (ver datasheets del AY0438 y del LCD od4010), pueden encenderse los segmentos de un display de 4 dígitos de tal manera que muestren los resultados obtenidos en el microcontrolador. La subrutina “Lcd” del código del PIC muestra la forma en que se realizaron las conversiones para lograr tal fin. A continuación se presenta el esqumático del circuito correspondiente al bloque completo [Fig. 15]. Las conexiones son las sugeridas para los diferentes dispositivos (PIC, DAC, manejador de teclado y manejador de LCD) en sus respectivos “datasheets” y las asignadas según los puertos elegidos para el programa del microcontrolador (ver sección de “Anexos”). Al igual que en el bloque de tratamiento de la señal eléctrica, VCC_ARROW se refiere a la fuente de 5V y VCC_CIRCLE, a la de –5V. Los amplificadores operacionales sirven para hacer que el voltaje de referencia del ADC tenga un valor de 4V cuando se entrega al DAC la palabra “10000000” (aunque es arbitrario, se adoptó para facilitar las pruebas).
Fig. 15

IEL2-I-04-05
29
3.5 MONTAJE DEFINITIVO. El montaje completo incluye los tres bloques descritos y las fuentes de alimentación. Estas consisten en circuitos reguladores de 5V y –5V capaces de entregar 1.0A con una regulación típica en la carga de 4 mV (ver datasheets de los circuitos integrados LM7805 y LM7905). Para mejorar el desempeño y reducir el riple que pueda presentarse, se adicionan condensadores de 470 µF a la entrada y a la salida de los integrados de regulación. Los condensadores de 0.1 µF ayudan a filtrar la señal con un tiempo de respuesta menor.
Fig. 16 Para evitar ruidos que puedan surgir de los pulsos de corriente entregados a la fuente lumínica, se instalan dos circuitos idénticos: uno que regula y alimenta al modulador lumínico (a través de los nodos +5V y –5V), y otro que entrega potencia al resto de bloques del circuito (a través de los nodos VCC_ARROW y VCC_CIRCLE). Con esto se pretenden aislar la generación y la recepción de las señales de la celda fotoacústica para no incurrir en errores por interferencias o ruidos en las fuentes. A partir de los esquemáticos se realiza el ruteo de las pistas del circuito completo y se obtienen la disposición de elementos y las máscaras para PCB mostradas en la sección de “Anexos”.

IEL2-I-04-05
30
4. RESULTADOS 4.1 PRUEBAS DE LA CELDA FOTOACÚSTICA. Las pruebas de la celda incluyen la determinación de la frecuencia de resonancia, el factor de calidad (Q) y el funcionamiento cualitativo del filtro pasabajas (pues es difícil producir sonidos de una frecuencia determinada dentro de la cavidad sellada). Para caracterizar la respuesta en frecuencia, se realizó un barrido entre 100Hz y 2KHz, y se observó el valor pico-pico de la señal de voltaje proveniente del micrófono (se realizó una pequeña amplificación para poder distinguir mejor la señal del ruido) producido por una excitación senoidal de 1 Vpp en el parlante. Como el comportamiento de los parlantes y los micrófonos varía con la frecuencia, fue necesario realizar una caracterización inicial del sistema generador de señales – parlante – micrófono para poder deducir la respuesta de la celda a partir de los resultados obtenidos con el sistema generador de señales – parlante – celda – micrófono. Para lograrlo, se realizó el siguiente procedimiento [Fig. 17]: Asumiendo que cada uno de los componentes del sistema es lineal, la salida (que en este caso es la señal de voltaje amplificada vista en el osciloscopio) es el resultado de la multiplicación (en el dominio de la frecuencia, “jω”) de la transformada de la entrada con las funciones de transferencia de cada uno de los subsistemas. Como la idea es hallar la magnitud de la función de transferencia de la celda (C) para una excitación senoidal (E), si se tiene la salida para el sistema que no incluye la celda (S1), la magnitud de la función de transferencia de la celda fotoacústica equivale a la de la salida del sistema que la incluye (S2) dividida por la del sistema que no la incluye (pues la entrada es igual en ambos casos).
Fig. 17
Así, la magnitud de la respuesta de la celda en función de la frecuencia es proporcional a la división de los valores pico-pico obtenidos en las mediciones con y sin cavidad acústica. Este resultado permite evaluar los resultados obtenidos en el laboratorio para poder analizar las características buscadas:

IEL2-I-04-05
31
Frec. (Hz)
Sis. Libre (V)
S1 Sis.+Cav. (V)
S2 Resp. Cav.
S2/S1 Resp. Norm
100 0.040 0.000 0.000 0.000 200 0.128 0.184 1.438 0.103 300 0.400 0.680 1.700 0.122 400 2.180 2.980 1.367 0.098 500 1.100 1.950 1.773 0.127 600 0.750 1.910 2.547 0.182 700 0.620 2.800 4.516 0.323 720 0.620 3.220 5.194 0.371 740 0.580 3.490 6.017 0.430 760 0.560 4.020 7.179 0.513 780 0.540 5.050 9.352 0.669 f res -> 803 0.510 7.130 13.980 1.000 820 0.510 4.850 9.510 0.680 840 0.520 3.660 7.038 0.503 860 0.540 3.450 6.389 0.457 880 0.560 3.330 5.946 0.425 900 0.620 3.200 5.161 0.369 1000 0.580 1.600 2.759 0.197 1100 0.580 1.120 1.931 0.138 1200 0.560 0.672 1.200 0.086 1300 0.560 0.580 1.036 0.074 1400 0.580 0.528 0.910 0.065 1500 0.580 0.512 0.883 0.063 1600 0.560 0.480 0.857 0.061 1700 0.680 0.584 0.859 0.061 1800 0.780 0.616 0.790 0.056 1900 0.860 0.720 0.837 0.060
Característica Amp. vs. F (Fig. 18)
0.000
0.200
0.400
0.600
0.800
1.000
1.200
0 500 1000 1500 2000
Frecuencia (Hz)
Res
pues
ta N
orm
aliz
ada

IEL2-I-04-05
32
La gráfica [Fig. 18] corresponde a los resultados normalizados (en los que todas las respuestas se dividen por la mayor amplitud obtenida) y muestra claramente que el resonador se comporta como un sistema de segundo orden con una frecuencia de resonancia y un ancho de banda bien definidos. La frecuencia de resonancia se midió en 803.0±1 Hz. El factor de calidad se calcula como la razón de la frecuencia de la resonancia con el ancho de banda a 3dB [1, 18], esto es, a la diferencia entre las frecuencias para las que la respuesta normalizada tiene el valor 0.707: Qaprox. = f0/(fH-fL) = 803/(815-785) = 26.8 Aunque los resultados no son idénticos a los esperados según los cálculos teóricos del diseño, sí deben permitir una detección (de acuerdo a los resultados obtenidos en [1, 4]). Las discrepancias prácticas y teóricas tienen una gran posiblidad de fuentes. En realidad, comienzan desde el mismo modelo matemático del problema, pues como se mencionó, las únicas pérdidas de energía que se asumieron en la deducción de la ecuación que lo describe son las resultantes de la radiación de sonido; en realidad, existen disipaciones mecánicas (como interacciones con las paredes del resonador) que reducen el factor de calidad y hacen que el sistema sea menos selectivo en frecuencia. El desplazamiento de la frecuencia de resonancia obedece en gran medida al valor asumido para la velocidad del sonido en el aire; si éste fuera 320 m/s (por ejemplo) en el momento de realizar las mediciones, el mismo diseño habría arrojado como resultado 1000Hz*(320/360)=889Hz. En realidad, el resultado obtenido es muy bueno si se tiene en cuenta que el error comparativo es
%7.19%1001000
|8031000|% =⋅
−=E
valor que es comprensible si se tienen en cuenta la gran cantidad de errores aleatorios que pueden ocurrir en la fabricación y operación del resonador real. El maquinado también tiene una influencia importante, pues las precisiones obtenidas con los tornos ofrecen ciertas tolerancias que pueden afectar el comportamiento en forma considerable. Observemos cómo cambiaría el valor de Q para pequeños errores en la elaboración de la celda: del cálculo diferencial se tiene que
dVVQdS
SQdQ
VSdS
SVd
SVdV
VQdS
SQdQdQ
223'
'23)'()'(3''3'
' 3
3
5
3
3 +−=+−=∂∂
+∂∂
+∂∂
= ll
lll
ll
lπππ
Así, para cambios pequeños en las dimensiones, los diferenciales se pueden reemplazar por “deltas” y puede observarse la desviación a la que conducen. Teniendo en cuenta las medidas tomadas en el diseño, para un valor de 100 en Q (aproximadamente) se requerían l’=5*10-3m, S=3.167*10-5m2 y V=1.131*10-5m3; asumiendo que l’ hubiera quedado 1 mm más corto, “S” 1.076*10-5m2 más grande (lo que corresponde a un aumento de 1 mm en el radio) y “V” 2.494*10-6m3 más grande (que puede suceder si la profundidad de la cavidad aumenta 1 mm y su radio 1 mm) se obtiene que

IEL2-I-04-05
33
94.69))10494.2(10131.12
1)10076.1(10167.32
3)10(10523(100 6
55
53
3−=⋅
⋅⋅+⋅
⋅⋅−−
⋅⋅⋅≈∆ −
−−
−−
−Q
¡El valor del factor de calidad cambia drásticamente! Si a este hecho se suman los efectos de las pérdidas de energía, los resultados prácticos son justificables. En lo que respecta al filtro pasabajas, se hicieron mediciones de ruido producido por el flujo continuo de vapor a través de la cavidad. Como la ebullición emite sonidos desiguales y aleatorios, era de esperar que se observaran picos de voltaje en los terminales del micrófono; de hecho, eso fue lo que se vió cuando se hizo entrar el vapor a la celda por la abertura que llega al resonador. Sin embargo, al conectar la fuente de vapor por el lado del filtro, se observó que el cambio de la señal eléctrica producida por el micrófono era despreciable y que la atenuación del ruido de la ebullición era lo suficientemente grande para desecharlo. 4.2 PRUEBAS DEL CIRCUITO. La comprobación del funcionamiento del circuito incluye tres partes: (1) evaluación del funcionamiento de la fuente de poder del LED; (2) evaluación del subsistema de tratamiento de la señal eléctrica; y (3) verificación del funcionamiento del microcontrolador, incluyendo manejador de teclado, manejador de LCD y conversor digital-análogo. Como el programa del microcontrolador se encarga de hacer los ajustes necesarios de amplificación y recalcula los parámetros de las traducciones voltaje-concentración cada vez que se realiza una nueva calibración, no es necesario tener en cuenta los valores exactos de ganancias a lo largo del sistema (por eso se tiene un código tan complejo): lo único que se requiere es que la señal DC que reciba en su conversor análogo-digital muestre cambios “visibles” para variaciones en la amplitud de las señales de 803Hz, esto es, que sean comparables a su mínima referencia permitida (4V/32=0.125V). Esto se puede lograr observando la magnitud de la señal recibida de la celda, ajustando la ganancia de la preamplificación para que se entreguen señales del orden de centivoltios a su salida, y corriendo la rutina de calibración (oprimiendo la tecla “B” del teclado, tal y como se muestra en el “Manual de Usuario” de la sección de Anexos).
- En lo que se refiere a la fuente de alimentación del LED, se observó con un osciloscopio la caída de potencial que se producía al conectar una carga arbitraria. La característica de la señal estableció que los pulsos tenían las propiedades buscadas en forma, frecuencia (ajustada con el potenciómetro R25) y ciclo de trabajo, pero no siempre en magnitud de corriente. Esto se debe, como se mencionó en la sección de Diseño, a que una caída de potencial muy grande en la carga puede saturar el transistor o el operacional e impedir que la corriente alcance el valor para el que la fuente fue diseñada (en este caso, 500 mA). Al realizar las pruebas con el LED infrarrojo, se obtuvieron pulsos cuadrados de 803.0±1 Hz con un valor RMS de 150 mA (picos de 210 mA, aproximadamente).

IEL2-I-04-05
34
Según los datos dados por el fabricante (ver [13]), esta corriente corresponde a una potencia radiante de 0.5 mW, valor que es adecuada para el funcionamiento correcto del sistema.
- Para la parte de tratamiento de la señal eléctrica se aplicó una señal senoidal (con el generador de señales) a los pines de conexión del micrófono y se observó el comportamiento de los diferentes sub-bloques al variar su amplitud y su frecuencia: tanto la preamplificación como el filtraje, la conversión RMS a DC y la amplificación final mostraron los resultados buscados. El ajuste de la banda de paso para 803 Hz se realizó modificando el valor de la resistencia “trimmer”; esta variación implicó la pérdida de la ganancia unitaria, pero fue fácilmente compensada aumentando el factor de la etapa de preamplificación.
- Aunque las simulaciones en MPLAB habían mostrado que el programa cumplía los requisitos definidos de acuerdo a los estados propuestos (ver sección de “Diseño del Sistema”), el bloque del microcontrolador requirió un poco más de trabajo pues debió verificarse “montado” en el circuito. Dado que el código es muy largo, fue necesario hacer programas más pequeños a partir de rutinas empleadas en el principal para comprobar que los diferentes circuitos integrados tuvieran el comportamiento esperado y que las conexiones se hubieran realizado correctamente, pues existen muchas pistas (sobre todo en la conexión con el LCD) que pueden conducir a “cortos” o fallas. Como primer paso, se comprobó el funcionamiento del microcontrolador y del conversor digital-análogo con la rutina de “autoamplificación” de voltaje: por medio de una conexión de dip-switches (al puerto D del PIC), se introducía un valor de concentración; luego se daba un voltaje análogo y se observaba el resultado de la conversión en un arreglo de LEDs (conectados al puerto C). El correcto funcionamiento se verificaba observando el bit más significativo de los LEDs: debía estar como máximo a tres posiciones respecto al bit más significativo introducido en los dip-switches. Luego se prosiguió con la comprobación del funcionamiento del teclado y de los códigos de aritmética de punto fijo: empleando la rutina de calibración, se observaba el valor del byte “medio” resultante de introducir un número de cuatro dígitos con el teclado. Así, si se pulsaba 3165 A(enter), debían obtenerse en el puerto C sus ocho bits menos significativos (no decimales), esto es, “01011101”; con 1219 A, “11000011”, etcétera. Una vez confirmado, se pudo tener certeza del correcto funcionamiento del PIC (incluyendo su ADC y sus puertos) del DAC (y las conexiones con los amplificadores operacionales), del manejador de teclado, y de algunas líneas del código, incluyendo la configuración inicial del microcontrolador y las rutinas de adquisición de datos, de conversión BCD a binario, de autoamplificación y de autorango. Para verificar el funcionamiento del LCD, se grabó el programa completo en el microcontrolador. Aunque en este paso se tuvieron que realizar algunas modificaciones al código, las correctas visualizaciones para diferentes calibraciones y amplitudes de voltaje aplicado indicaron el fin de las pruebas y la obtención del comportamiento deseado para el circuito del sistema. 4.3 PRUEBAS DEL SISTEMA COMPLETO.

IEL2-I-04-05
35
Después de realizar la conexión de la celda y el circuito, se encendió la fuente de poder y se observó que no ocurría cambio alguno en el dato de “concentración” (todavía descalibrado) arrojado por el LCD, hecho que implicaba que no estaban ocurriendo cambios sensibles en la señal DC entregada al microcontrolador. Esto motivó una revisión con osciloscopio de la etapa de tratamiento de la señal eléctrica, que permitió establecer que la señal proveniente del micrófono no podía distinguirse del ruido presente en el sistema, y que éste era demasiado grande comparado con lo que se había visto cuando se habían conectado otras cargas (principalmente LEDs comunes) al circuito de alimentación del LED. Verificando el circuito de modulación se observó que el LED infrarrojo era el responsable, pues las fuentes externas de voltaje no eran capaces de regular correctamente la tensión que entregaban al sistema para picos de corriente tan grandes y, aunque el diseño se realizó teniendo en cuenta que un problema similar podría ocurrir, los reguladores internos no lograban corregir completamente esa falla. Ese problema se corrigió empleando fuentes (externas) de voltaje diferentes, y se redujo la amplitud del ruido de 4 mV a 1 mV. Sin embargo, la señal eléctrica del micrófono no logró superar ese umbral, y el efecto fotoacústico siguió sin mostrar resultados. ¿Qué podía estar ocurriendo? En ese momento, existían dos posibles problemas: (1) que la señal de alimentación del LED no estuviera bien generada, pues el osciloscopio mostraba que en los ciclos bajos la caída de potencial no llegaba a 0V (lo que implicaba que en esos estados se hacía circular corriente, produciendo una radiación que podía afectar el comportamiento del sistema); y (2), que no existiera la suficiente humedad en el aire para producir una lectura en el dispositivo. Para solucionar el primer inconveniente, se modificó el circuito y se redujo la alimentación positiva de la fuente de corriente a 3.5V; como los pulsos de voltaje del 555 seguían teniendo valores de 0V y 5V, en sus ciclos altos se logró hacer que el transistor entrara a corte, anulando la corriente de colector e impidiendo que circulara a través de la carga; en los bajos, se mantuvo casi intacto el valor de corriente entregada. Como no se obtuvieron mejores resultados, se decidió tomar en consideración la concentración de agua en el ambiente y se trasladó el equipo de pruebas al laboratorio de Química General. Empleando el siguiente arreglo
Fig. 19 se introdujo a la celda un flujo de aire con alto contenido de vapor. Esto se hizo con el objetivo de evitar dudas sobre la presencia de agua gaseosa en la unidad de detección y así,

IEL2-I-04-05
36
poder descartar la posibilidad de estar realizando “mediciones sin muestra”. Los resultados: iguales. No era posible distinguir una señal que diera indicios sobre el efecto fotoacústico (de todas formas, este montaje sirvió para observar la funcionalidad del filtro pasabajas, como se mencionó en la sección de “Pruebas de la celda fotoacústica”). Ahora surgía otra posibilidad: ¿sería posible que el LED estuviera tan lejos de la primera cámara de la celda como para que toda la radiación se absorbiera en el tubo y la señal fotoinducida fuera atenuada por el filtro pasabajas? Para evitarla, se redujo la longitud del tubo de tal manera que el lente del LED quedara justo en la entrada de la primera cámara e incidiera directamente en ella. Al nuevo dispositivo se le repitió la prueba del vapor, sin obtener con ello resultados positivos. Quedaba un único punto por probar antes de revisar la teoría: ¿realmente estaba funcionando el LED? Aunque parezca sencillo este es un problema complejo, pues uno de los principales motivos por los que se escogió el método de detección fotoacústica es el de no necesitar detectores infrarrojos (que para esta longitud de onda resultan costosos, complejos de manejar y muy difíciles de conseguir). Como la caída de potencial en los terminales del dispositivo exhibía un comportamiento aparentemente “normal” (existían caídas para presencias de corrientes y potenciales nulos para cortes), el primer paso fue escribir a la compañía Boselec (de donde se adquirió el LED) para pedir información al respecto; desafortunadamente, la única solución sugerida era comprar el detector IR correspondiente (cuyo trámite es lento). Buscando otras alternativas, se recolectó información sobre dispositivos que operan en el espectro infrarrojo: los fotodiodos son fáciles de conseguir pero son sensibles hasta radiaciones de 1000 nm; los rollos y papeles fotográficos responden hasta longitudes de onda de ese mismo valor; los espectrofotómetros del departamento de Química detectan haces de hasta 900 nm. Los espectroscopios FTIR realizan cálculos con un rayo láser de referencia que hace imposible cualquier intento de montaje del LED en el aparato (pues no hay manera de hacer que el láser tenga en cuenta la presencia del LED). El mismo hecho que ayudó a la selección del método hizo de este punto algo de difícil realización: las longitudes de onda que se usan son tan específicas a estas aplicaciones que su disponibilidad comercial y su facilidad de trabajo son muy reducidos. Revisando la bibliografía, se observó que aunque no había una configuración como la propuesta en este proyecto (empleando un LED y una celda fotoacústica con resonancia de Helmholtz), sí se ha comprobado experimentalmente la obtención del efecto fotoacústico empleando LEDs infrarrojos en cavidades cilíndricas ([4]) y con resonadores de Helmholtz excitados por láseres de cascada cuántica (QCL) ([1]); de hecho, el montaje de este proyecto está basado en sugerencias hechas por el grupo responsable de ese último trabajo. De los datos obtenidos en [1] con una cavidad con Q=24, frecuencia de resonancia en 1.3 KHz y empleando un láser QCL de 10 mW se pueden ver respuestas de hasta 200 mV en el micrófono. Si se tiene en cuenta que esa radiación presenta una gran divergencia y que el método de detección no requiere enfocar el haz, no hay motivo para creer que la utilización de un LED (que evita pérdidas de potencia por no necesitar lentes adicionales) no pueda proveer la intensidad necesaria para generar la onda fotoacústica. En [2] se obtienen señales de 5 mV de amplitud para absorbancias de 0.9/cm (empleando soluciones acuosas en una

IEL2-I-04-05
37
configuración diferente); en [5], amplitudes de 6 mV utilizando absorbancias 0.0039/cm en agua y lámparas de Xenón; en [4], se observan respuestas del orden de 1 mV para la excitación de propano con un LED infrarrojo de 7 µW de potencia. Esos resultados permiten ofrecer las siguientes explicaciones a la falta de detección de la señal de sonido en este trabajo:
- Aunque la potencia entregada por el LED debería ser suficiente según las características de potencia-corriente dadas por el fabricante (ver sección de Anexos), existe la posibilidad que no se esté entregando la suficiente energía al sistema para lograr amplitudes detectables de la onda de presión. Es necesario realizar mediciones precisas sobre la potencia entregada por el LED y determinar las longitudes de onda presentes en la radiación. Como se mencionó, esto resulta difícil cuando no se cuenta con el equipamiento especializado para trabajar en el espectro infrarrojo mediano, pues los dispositivos disponibles (así como los comunes) no son sensibles a esas frecuencias. En caso de encontrar fallas en su operación, podría reemplazarse con uno diferente o aumentarse la cantidad de corriente entregada en los pulsos para realizar nuevamente las pruebas.
- El ruido puede estar escondiendo el límite de detección, pues existe la posibilidad que la onda de presión se esté generando pero que la señal eléctrica sea muy débil para lograr cambios distinguibles entre el ruido presente en la entrada a la unidad de tratamiento eléctrico. Las pruebas con vapor se realizaron con el propósito de observar que la concentración no fuera lo suficientemente baja como para evitar las detecciones, así que la responsabilidad recae en el valor de selección y amplificación del resonador de Helmholtz y en la habilidad de la etapa de preamplificación para descubrir la señal. Aunque se empleó un amplificador de instrumentación con ese propósito, en todos los artículos investigados se emplean amplificadores tipo “lock-in” que son capaces de realizar amplificaciones con base en una referencia (amplifican únicamente la señal que tenga las características de esa referencia). Esa configuración agrega complejidad al sistema, pues requiere diseñar e implementar el circuito correspondiente (además de generar una referencia adecuada, que en muchos casos requiere de detectores infrarrojos), pero puede ser una buena idea si el funcionamiento del LED es adecuado y no se obtienen los resultados buscados. En lo que respecta al resonador, los resultados de [1] hacen poco probable que esté dando problemas al sistema: el diseño se hizo de acuerdo a las sugerencias de ese documento y las características del dispositivo “real” son mejores que en ese caso. Sin embargo, puede construirse una nueva celda con mejores tolerancias y mayores factores de calidad para lograr amplificaciones más elevadas y filtrajes más selectivos.
- La dependencia de la detección en variables ambientales permiten considerarlas como posibles responsables en la generación de una onda fotoacústica demasiado pequeña. Aunque los cálculos realizados en la sección de “Especificación del problema y de su solución” predicen la detección en condiciones normales de temperatura y presión en Bogotá, es posible que se requieran algunas modificaciones para aumentar las posibilidades de obtener señales sonoras adecuadas. De acuerdo a las ecuaciones, tanto el aumento de la

IEL2-I-04-05
38
presión como la disminución de la temperatura pueden brindar una ventaja al aumentar la amplitud de la onda de presión correspondiente; esto ayudaría en las pruebas pero sería perjudicial en la complejidad del sistema, pues la adición de compresores o refrigeradores aumentaría el número de partes, el tamaño y el consumo de energía del conjunto. Estos ítems ofrecen puntos de partida necesarios para futuras investigaciones en el tema.

IEL2-I-04-05
39
CONCLUSIONES La realización del proyecto mostró la posibilidad de hacer aproximaciones sencillas y flexibles al problema de detección de gases: no se necesitan aparatos ni herramientas especializadas y costosas para lograrlo (y que en la mayoría de los casos pueden brindar más información que la buscada, como ocurre con los espectroscopios); se requiere una investigación seria del problema y la evaluación cuidadosa de las alternativas que han brindado diferentes fenómenos físicos en el desarrollo de la identificación de compuestos. En este caso, las restricciones planteadas (transportabilidad, facilidad de uso y bajo costo) llevaron a la elección del fenómeno fotoacústico como el “medio” para detectar la presencia de agua en el aire. Aprovechando la experiencia de varios grupos de investigación a nivel mundial en ese tema, se planteó una solución que se acomodaba a los objetivos perseguidos y que dio la posibilidad de dar forma y desarrollar un dispositivo completo que cumpliera con esos propósitos. El diseño y la fabricación de los diferentes subsistemas y componentes exigió el planteamiento de soluciones originales para los problemas que iban apareciendo y motivó el desarrollo de la celda fotoacústica con resonancia de Helmholtz excitada con LEDs infrarrojos. Esta disposición permite eliminar completamente cualquier aparato óptico adicional y otorga al sistema la posibilidad de hacer mediciones de concentración de otros gases con el mismo dispositivo (cambiando el LED por uno que emita radiación en alguna banda de absorción fuerte y característica del gas en cuestión). Como existe una alta posibilidad que la onda fotoinducida sea diferente para distintos LEDs y gases, se construyó un circuito que minimiza al máximo los esfuerzos de calibración (a través de rutinas como la “autoamplificación de voltaje”) para que se adapte a diferentes configuraciones y otorgue la flexibilidad que se estaba buscando. Esto lo convierte en una plataforma de prueba utilizable en futuros proyectos relacionados con el tema, y en otros que pretendan minimizar al máximo la complejidad en la adquisición de datos con sistemas electrónicos. El sistema completo no mostró los resultados esperados. Aunque los cálculos teóricos y los resultados obtenidos por los diferentes trabajos consultados permitían tener una gran confianza en su funcionamiento, no logró detectarse una señal fotoacústica con certeza. Sin embargo, las diferentes pruebas arrojaron posibles mejoras que pueden llevar a una operación exitosa sin realizar cambios notorios y empleando la información y los dispositivos construidos para este proyecto. En definitiva, se abrieron las puertas (con un gran camino recorrido) para lograr implementar un método diferente (y confiable) de detección de gases por fuera del laboratorio.

IEL2-I-04-05
40
BIBLIOGRAFÍA [1] Gas detection with quantum cascade lasers: An adapted photoacoustic sensor based on Helmholtz resonance. Stefano Barbieri, et al. Review of Scientific Instruments, Volumen 73, número 6, pp 2458-2461. Junio de 2002. [2] Laser photoacoustic spectroscopy: A versatile absorption-spectroscopy technique. Nancy S. Foster, et al. Febrero de 1999. [3] Photoacoustic spectroscopy in trace gas monitoring. Franz J.M. Harren, et al. Encyclopedia of Analytical Chemestry (2000), pp 2203-2226. [4] Miniaturization and integration of photoacoustic detection with a microfabricated chemical reactor system. Samara L. Firebaugh, et al. Journal of Microelectromechanical Systems, Vol. 10, No. 2, pp 232-236. Junio de 2001. [5] Tunable UV visible photoacoustic detection analysis of the sensitivity and selectivity provided by a xenon flash lamp. Tom Autrey, et al. Analytica Chimica Acta 434 (2001) 217-222. [6] Time-resolved photothermal methods: accesing time-resolved thermodynamics of photoinduced processes in chemistry and biology. Thomas Gensch y Cristiano Viappiani. Photochem. Photobiol. Sci., 2003, 2, 699-721. [7] Miniaturization and integration of photoacoustic detection. Samara L. Firebaugh. Massachussets Institute of Technology, Mayo de 2001. Trabajo de grado (doctorado en Ingeniería Eléctrica y Ciencias de Computación). [8] Principles of Instrumental Analysis. Douglas A. Skoog, et al. pp 299-429. 5a edición, 1998. [9] Fundamentals of Acoustics. Lawrence E Kinsler, et al. 2a edición, 1962. [10] Termodinámica. Virgil M. Faires. pp 654-671. 1962. [11] Application in gas sensors [en línea]. http://www.roithner-laser.com/All_Datasheets/ MID_IR/application.pdf. [12] Amplificadores operacionales y circuitos integrados lineales. Robert F. Coughlin y Frederick F. Driscoll. 5a edición, 1999.

IEL2-I-04-05
41
[13] LED18-10 Datasheet [en línea]. http//www.boselec.com/products/documents/ IRLEDs7-26-02.pdf [14] Method of C2H4 detection in humid atmospheres using a nanoparticular SnO2 sensor. Mauricio Guerrero, et al. Junio de 2002. [15] Chemical species gas sensors [en línea]. Gary W. Hunter. http://www.grc.nasa.gov/ WWW/chemsensors/ [16] Application of nid-infrared LED and photodiodes in gas sensors [en línea]. Nikolay Stoyanov. http://www.ibsg-st-petersburg.com/About_Us/applicat.htm [17] Nanotubes make miniature gas sensors [en línea]. Belle Dumé. http://physicsweb. org/article/news/7/7/8 [18] Electric circuits fundamentals. Sergio Franco. pp 444-451, 576-595. 1995

IEL2-I-04-05
42
ANEXOS

IEL2-I-04-05
A.1 MANUAL DE OPERACIÓN DEL SISTEMA El sistema consta de dos bloques (un circuito y una celda fotoacústica) en los que pueden ubicarse las siguientes conexiones:
El circuito necesita una fuente de voltaje que entregue tensiones de 9V a 15V y -15V a -9V. Una vez encendida la alimentación, el sistema empieza su funcionamiento y repite las mediciones de concentración hasta cuando sea desconectado. Estas se calculan empleando la información obtenida en la última calibración (no es necesario recalibrar el aparato cada vez que se enciende). Los datos son visualizados en la pantalla de cristal líquido en las unidades con las que se ingresaron los datos en esa última ocasión; en general, dado que es de común uso, es preferible emplear la escala de ppm (partes por millón) pues el rango de detección esperado cubre unidades enteras entre 1 ppm y 9999 ppm. Sin embargo, pueden emplearse otras graduaciones cuando se considere necesario; solo basta con llamar una nueva rutina y digitar los valores de concentración presentes en la celda cuando sean solicitados. La calibración se basa en el hecho que para bajas concentraciones de gas (agua), el voltaje entregado por el micrófono varía de manera lineal; por ello, se pide que se introduzcan los valores de dos concentraciones (distintas) que se sepa que están contenidas en la celda. La rutina es la siguiente:
1. Se conecta el teclado de matriz (4x4) en el socket asignado en el circuito. 2. Se oprime el botón “B”. Deberá visualizarse la palabra “CAL” durante 2 seg en el
LCD.

IEL2-I-04-05
3. Cuando haya aparecido la orden “n1”, deberá introducirse el valor de la concentración de gas presente en ese momento en la celda. Esto se logra tecleando los números (que pueden observarse en la pantalla) y oprimiendo “A” para finalizar (el dato no se procesa hasta que no se oprima “A”, por lo que puede modificarse el valor entregado digitándolo nuevamente antes de hacerlo).
4. En este momento podrá leerse “n2” en el LCD. Esto indica que debe ingresarse el segundo dato de concentración (que DEBE ser diferente al primero). Una vez se haya modificado la composición del gas en la celda, se teclea el dato correspondiente y se oprime “A”. Esto finaliza la rutina de calibración (puede retirarse el teclado).
En adelante, cada vez que se encienda el sistema se utilizarán los valores generados con este procedimiento (hasta que no se realice otro). En caso de ocurrir errores (como datos inconsistentes o señales demasiado pequeñas saliendo de la celda fotoacústica), aparecerá la palabra “Err” en el LCD. Cuando esto suceda, se descartarán los valores calculados y se seguirá trabajando con los anteriores. Cuando las señales de voltaje sean muy pequeñas, es posible que la rutina de autoamplificación no sea capaz de distinguirlas. En ese caso, deberá disminuirse el valor de la resistencia (trimmer) de la etapa de preamplificación (R4) con un destornillador pequeño. Una vez hecho esto, se debe repetir la rutina de calibración de la manera explicada (si vuelve a leerse “Err” en la pantalla, deberá disminuirse en mayor medida la resistencia y repetirse el procedimiento). En caso que los cálculos de concentración sobrepasen el valor de 9999, se saturará la visualización en ese número. Es preciso tener en cuenta que ese es el máximo valor que puede obtenerse, por lo que en caso de presentar inconvenientes deberán realizarse calibraciones con escalas de magnitudes más pequeñas.

IEL2-I-04-05
A.2 PLANOS DE LA CELDA FOTOACÚSTICA.

IEL2-I-04-05
A.3 PLANOS DEL CIRCUITO Parte inferior del circuito impreso.

IEL2-I-04-05
Parte superior del circuito impreso.

IEL2-I-04-05
Posición de los elementos en el circuito.

IEL2-I-04-05
A.4 DATASHEET DEL LED.

IEL2-I-04-05

IEL2-I-04-05
A.5 CODIGO DEL PROGRAMA EJECUTADO POR EL MICROCONTROLADOR. ; MARCELO BAQUERO, UNIVERSIDAD DE LOS ANDES (CÓDIGO 199911928) ; Programa del controlador del sistema de detección de gases (compilado con el programa MPLAB de Microchip) #INCLUDE <p16f877a.inc> ; Registros de uso específico de la referencia de microcontrolador elegida __CONFIG _CP_OFF & _WDT_OFF & _XT_OSC & _LVP_OFF; ;_CP_OFF for Code Protection off, _WDT_ON for Watchdog Timer off, ;_BODEN_ON for Brown-Out Reset On, _PWRTE_ON for Power-Up Timer Enable ;On, _RC_OSC for RC oscillator selected, _WRT_ENABLE_ON for Flash Program ;Memory Write On, _LVP_ON for Low Voltage In-Circuit Serial Programming On, ;_DEBUG_OFF for In-Circuit Debugging Mode off, and _CPD_OFF for Data EE ;Memory Code Protection off.
;-------------------------------------------------------------------------------------------------------------------------------- ; ----------------DECLARACIÓN DE LAS VARIABLES EMPLEADAS EN EL PROGRAMA----------------
; Variables empleadas en las operaciones aritméticas. CBLOCK 20h ; Variables empleadas en la suma de dos números de 3 Bytes SUM1H ; (se emplean las direcciones a partir de 20h) SUM1M SUM1L SUM2H SUM2M SUM2L ENDC CBLOCK 20h ; Variables empleadas en la resta de dos números de 3 Bytes REST1H REST1M REST1L REST2H REST2M REST2L ENDC CBLOCK 20h ; Header de multiplicación (se usan registros desde el 32h). Product:6 ;Input: Multipland:3 ; Multiplier - 3 bytes (compartido con Product) BitCount:1 ; Multiplicand - 3 bytes (no modificado) ENDC ; Temporal: Bitcount ; Output: Product - 6 bytes
Multiplier EQU Product+3 ;3 bytes compartidos con los 3 menos significativos de "Product" (+3..5). CBLOCK 20h ; Header de división (se usan registros desde el 20h). nratorH ; numerador: nratorH nratorM nratorL nratorM ; denominador: denomH denomM denomL nratorL ; resultado: RES_DIVH RES_DIVM RES_DIVL (para DivDec) denomH ; nratorH nratorM nratorL (para Div24) denomM ; residuo: remainH remainM remainL denomL remainH remainM remainL shiftH shiftM shiftL BCount RES_DIVH RES_DIVM RES_DIVL ENDC ; Variables empleadas por el programa en sí (datos sobre ordenadas y abscisas).

IEL2-I-04-05
CBLOCK 30h ; Primera pareja ordenada de datos. n1H ; Tienen el siguiente formato: n1M ; H | M | L n1L ; MSBy | LSBy | Decimales v1H v1M v1L ENDC CBLOCK 36h ; Segunda pareja ordenada de datos. n2H ; Tienen el mismo formato que en el primer caso. n2M n2L v2H v2M v2L ENDC CBLOCK 3Dh ; Parámetros de la ecuación de la recta: mH ; mH:mM:mL => pendiente mM ; bH:bM:bL => ordenada al origen mL ; En ambos casos se tienen números de punto fijo de 3 bytes, bH ; siendo el último (L) la parte decimal. bM bL Vref ; Voltaje de referencia positivo: ajustado por la autocamplificación (almacenado en 10h de la EEPROM). vH ; Valores de voltaje provenientes de la conversión. vM vL nH ; Valores de concentración calculados por el programa. nM nL temp1 ; Registros de almacenamiento temporal. tempH tempM tempL temp1H ; Variables temporales. temp1M temp1L temp2H ; Variables temporales. temp2M temp2L ENDC #define CLK PORTD,0 ; Definiciones empleadas en el envío de la concentración calculada al LCD #define DATAIN PORTD,1 #define LOAD PORTD,2 #define UPDATELCD PORTD,7 CBLOCK 55h MSD THRDSD SCNDSD LSD count temp ENDC
;-------------------------------------------------------------------------------------------------------------------------------- ; ----------------------------PROGRAMA PRINCIPAL DEL CONTROLADOR------------------------------------
ORG 00h INICIO: GOTO PPAL; ORG 400h PPAL: NOP config: BCF STATUS,6 ; Estableciendo banco de registros numero 0 BCF STATUS,5 MOVLW B'10000001' ; Configuración de ADCON0 MOVWF ADCON0 ; Fosc/64, canal 0 (AN0), conversión detenida, conversor activado BSF STATUS,5 ; Banco 1

IEL2-I-04-05
MOVLW B'11000101' ; Configuración de ADCON1 MOVWF ADCON1 ; Justificado a la derecha, Fosc/64, 2 canales análogos (AN1-AN0, AN3=Vref+). BCF OPTION_REG,5 ; Configuración del Timer 0: modo contador (se incrementa en 1 con cada ciclo de instrucción). MOVLW B'10000001' ; Configuración de la transmisión serial: 2400 baudios. MOVWF SPBRG ; La transmisión se inicia al grabar un byte en TXREG y se espera a que TXSTA 1 pase a 1. BCF TXSTA,6 ; 8 bits BSF TXSTA,5 ; Transmisión habilitada BCF TXSTA,4 ; Modo asíncrono BCF TXSTA,2 ; Velocidad baja MOVLW 0x00 ; Puerto B: salida (para la conversión D/A de Vref). MOVWF TRISB BCF OPTION_REG,7 ; Se habilitan los pull-ups del puerto B. MOVLW B'11111000' ; Puerto D: Bits 0,1,2 son salidas (para manejo de LCD); 5 inputs para manejo de teclado. MOVWF TRISD BCF STATUS,5 ; Banco 0 CLRF INTCON ; Deshabilitación de interrupciones BSF RCSTA,7 ; Configuración de recepción serial: 2400 baudios, conexión DEShabilitada. BCF RCSTA,6 ; 8 bits BSF RCSTA,4 ; Recepción continua habilitada BCF RCSTA,3 ; Para una recepción se espera a que PIR1 5 pase a 1 y se toma el dato de RCREG leer: MOVLW 00h ; Se leen "m", "b", y "Vref" de la EEPROM (estos son los valores resultantes de la MOVWF temp1 ; anterior calibración). CALL Leer_eeprom MOVWF mH; MOVLW 01h MOVWF temp1 CALL Leer_eeprom MOVWF mM; MOVLW 02h MOVWF temp1 CALL Leer_eeprom MOVWF mL; MOVLW 03h MOVWF temp1 CALL Leer_eeprom MOVWF bH; MOVLW 04h MOVWF temp1 CALL Leer_eeprom MOVWF bM; MOVLW 05h MOVWF temp1 CALL Leer_eeprom MOVWF bL; MOVLW 10h MOVWF temp1 CALL Leer_eeprom MOVWF Vref; MOVWF PORTB conv: CALL Auto_rango ; Se realiza la conversión A/D del voltaje. Calculo: MOVFW mH ; Se realiza el cálculo de la concentración: n=m*v+b MOVWF Multipland ; Pasar valores de pendiente a registros de multiplicación. MOVFW mM MOVWF Multipland+1 MOVFW mL MOVWF Multipland+2 MOVFW vH ; Pasar valores de abscisa (v1) a registros de multiplicación. MOVWF Multiplier MOVFW vM MOVWF Multiplier+1 MOVFW vL MOVWF Multiplier+2 CALL Mult24 MOVFW Product+2 ; Pasar valores de m*v a registros de suma. MOVWF tempH

IEL2-I-04-05
MOVFW Product+3 MOVWF tempM MOVFW Product+4 MOVWF tempL MOVFW tempH MOVWF SUM1H MOVFW tempM MOVWF SUM1M MOVFW tempL MOVWF SUM1L MOVFW bH ; Pasar valores de b a registros de suma. MOVWF SUM2H MOVFW bM MOVWF SUM2M MOVFW bL MOVWF SUM2L CALL Sum24 ; Realizar m*v+b MOVFW SUM1H ; Se almacena el valor de la concentración (n) en los registros correspondientes. MOVWF nH MOVFW SUM1M MOVWF nM MOVFW SUM1L MOVWF nL result: CLRF nratorH ; Se envían los datos a la pantalla de cristal líquido. MOVFW nH ; Se pasa el resultado a formato BCD (un dígito por byte, se ignoran los decimales). MOVWF nratorM MOVFW nM MOVWF nratorL CLRF denomH CLRF denomM MOVLW D'10' MOVWF denomL CALL Div24 MOVFW remainL ; Se obtienen las unidades. MOVWF LSD CALL Div24 ; Como el resultado queda grabado en nratorX, se realiza otra división para MOVFW remainL ; determinar las decenas. MOVWF SCNDSD CALL Div24 ; Como el resultado queda grabado en nratorX, se realiza otra división para MOVFW remainL ; determinar las centenas. MOVWF THRDSD CALL Div24 ; Por último, se determinan las unidades de mil. MOVFW remainL MOVWF MSD MOVFW nratorL ; Se revisa que no exista overflow (si la concentración es mayor a 9999 ppm). ADDWF nratorM,W ADDWF nratorH,W BTFSC STATUS,Z GOTO display MOVLW D'9' ; En caso que así suceda, se satura el valor en el máximo (9999 ppm). MOVWF LSD MOVWF SCNDSD MOVWF THRDSD MOVWF MSD display: CALL Lcd calibrar: BTFSS PORTD,7 ; Se revisa si existe una solicitud de calibración. GOTO conv ; En caso que no la haya, se repite la rutina con un nuevo valor digital del voltaje. CALL Wait50ms ; Se esperan 50ms para que se estabilice la señal. MOVFW PORTD ; Se toma el valor presente en el puerto. ANDLW B'01111000' ; Se verifica si es o no una solicitud de calibración. MOVWF temp MOVLW B'01011000' SUBWF temp,0 BTFSS STATUS,Z GOTO conv ; Si no lo es, se repite el procedimiento. De lo contrario, se sigue con la calibración. CALL disp_CAL ; Se muestra la palabra "CAL" en el display para avisar al usuario que ha

IEL2-I-04-05
; iniciado la calibración. MOVLW D'24' ; Se carga el nombre de la variable a recibir (n1) en tempH:tempM (para que aparezca en MOVWF tempH ; la interfaz). MOVLW D'1' MOVWF tempM CALL Tomar_datos ; Tomar los datos introducidos por el teclado (devuelve en temp1H:temp1M:temp1L MOVFW temp1H ; el número binario del valor tecleado) MOVWF n1H ; Se almacenan los datos en los registros correspondientes (n1H:n1M:n1L). MOVFW temp1M MOVWF n1M CLRF n1L CALL Vref_CAL ; Se autocalibra la amplificación de voltaje dependiendo del dato recibido en "n1". BTFSC STATUS,2 ; Si la rutina devuelve el flag Z en 1, ha ocurrido un error y debe terminarse GOTO Error_CAL ; el programa. MOVFW Vref ; Vref se almacena en la dirección 10h de la EEPROM. MOVWF temp1L MOVLW 10h MOVWF temp1H CALL Grabar conv1: CALL ADC ; Se toma el dato de voltaje y se convierte a "digital". MOVFW ADRESH MOVWF v1H BSF STATUS,5 ; Banco 1. MOVFW ADRESL BCF STATUS,5 ; Banco 0. MOVWF v1M CLRF v1L MOVLW D'24' ; Cargar el nombre de la variable a recibir (n2) en tempH:tempM. MOVWF tempH MOVLW D'2' MOVWF tempM CALL Tomar_datos ; Tomar los datos introducidos por el teclado (devuelve en temp1H:temp1M MOVFW temp1H ; el número binario del valor tecleado) MOVWF n2H ; Se almacenan los datos en los registros correspondientes (n2H:n2M:n2L). MOVFW temp1M MOVWF n2M CLRF n2L conv2: CALL ADC ; Se toma el dato de voltaje correspondiente a esa concentración (n2) y se convierte MOVFW ADRESH ; a "digital". MOVWF v2H BSF STATUS,5 ; Banco 1. MOVFW ADRESL BCF STATUS,5 ; Banco 0. MOVWF v2M CLRF v2L noDiv_0: MOVFW v2L ; Debe probarse que v1 no sea igual a v2 (no se podría calcular m) SUBWF v1L,0 BTFSS STATUS,2 ; Si v1L-v2L es 0, se verifican M y H; si no, se sigue con la rutina. GOTO recta MOVFW v2M SUBWF v1M,0 BTFSS STATUS,2 ; Si v1M-v2M es 0, se verifica H; si no, se sigue con la rutina. GOTO recta MOVFW v2H SUBWF v1H,0 BTFSS STATUS,2 ; Si v1H-v2H es 0, significa que v1=v2: debe suspenderse la rutina. GOTO Error_CAL recta: MOVFW n1H ; Se empieza calculando la pendiente: debe realizarse la operación (n1-n2)/(v1-v2) MOVWF REST1H ; Se realiza la resta de ordenadas MOVFW n1M MOVWF REST1M MOVFW n1L MOVWF REST1L MOVFW n2H MOVWF REST2H

IEL2-I-04-05
MOVFW n2M MOVWF REST2M MOVFW n2L MOVWF REST2L CALL Rest24 BTFSC STATUS,0 ; Si el resultado es negativo, se debe cambiar el orden de la resta. GOTO orden1 MOVFW n2H MOVWF REST1H MOVFW n2M MOVWF REST1M MOVFW n2L MOVWF REST1L MOVFW n1H MOVWF REST2H MOVFW n1M MOVWF REST2M MOVFW n1L MOVWF REST2L CALL Rest24 GOTO orden2 orden1: MOVFW REST1H ; Se guarda el resultado en los registros temporales. MOVWF temp1H MOVFW REST1M MOVWF temp1M MOVFW REST1L MOVWF temp1L MOVFW v1H ; Se realiza la resta de abscisas MOVWF REST1H MOVFW v1M MOVWF REST1M MOVFW v1L MOVWF REST1L MOVFW v2H MOVWF REST2H MOVFW v2M MOVWF REST2M MOVFW v2L MOVWF REST2L CALL Rest24 GOTO pend orden2: MOVFW REST1H ; Se guarda el resultado de la resta de ordenadas en los registros temporales. MOVWF temp1H MOVFW REST1M MOVWF temp1M MOVFW REST1L MOVWF temp1L MOVFW v2H ; Se realiza la resta de abscisas MOVWF REST1H MOVFW v2M MOVWF REST1M MOVFW v2L MOVWF REST1L MOVFW v1H MOVWF REST2H MOVFW v1M MOVWF REST2M MOVFW v1L MOVWF REST2L CALL Rest24 pend: MOVFW REST1H ; Se guarda el resultado en los registros del denominador (para la división). MOVWF denomH MOVFW REST1M MOVWF denomM MOVFW REST1L MOVWF denomL

IEL2-I-04-05
MOVFW temp1H ; Se pasa la diferencia de las ordenadas al "numerador" de la división. MOVWF nratorH MOVFW temp1M MOVWF nratorM MOVFW temp1L MOVWF nratorL CALL DivDec ; Se realiza la división de (n1-n2)/(v1-v2) MOVFW RES_DIVH ; Se guarda el valor calculado de la pendiente (m=(n1-n2)/(v1-v2)) en los registros correspondientes. MOVWF mH MOVFW RES_DIVM MOVWF mM MOVFW RES_DIVL MOVWF mL ord: MOVFW mH ; Se realiza el cálculo de la ordenada al origen: se hace b=n1-m*v1: MOVWF Multipland ; Pasar valores de pendiente a registros de multiplicación. MOVFW mM MOVWF Multipland+1 MOVFW mL MOVWF Multipland+2 MOVFW v1H ; Pasar valores de abscisa (v1) a registros de multiplicación. MOVWF Multiplier MOVFW v1M MOVWF Multiplier+1 MOVFW v1L MOVWF Multiplier+2 CALL Mult24 MOVFW Product+2 ; Pasar valores de m*v1 a registros de resta. MOVWF temp1H MOVFW Product+3 MOVWF temp1M MOVFW Product+4 MOVWF temp1L MOVFW temp1H MOVWF REST2H MOVFW temp1M MOVWF REST2M MOVFW temp1L MOVWF REST2L MOVFW n1H ; Pasar valores de n1 a registros de resta. MOVWF REST1H MOVFW n1M MOVWF REST1M MOVFW n1L MOVWF REST1L CALL Rest24 MOVFW REST1H ; Se almacena el valor de la ordenada al origen (b) en los registros correspondientes MOVWF bH MOVFW REST1M MOVWF bM MOVFW REST1L MOVWF bL almace: MOVFW mH ; Se graban los valores de m y b en la EEPROM. MOVWF temp1L ; mH se almacena en la dirección 00h MOVLW 00h MOVWF temp1H CALL Grabar MOVFW mM ; mM se almacena en la dirección 01h MOVWF temp1L MOVLW 01h MOVWF temp1H CALL Grabar MOVFW mL ; mL se almacena en la dirección 02h MOVWF temp1L MOVLW 02h MOVWF temp1H CALL Grabar MOVFW bH ; bH se almacena en la dirección 03h

IEL2-I-04-05
MOVWF temp1L MOVLW 03h MOVWF temp1H CALL Grabar MOVFW bM ; bM se almacena en la dirección 04h MOVWF temp1L MOVLW 04h MOVWF temp1H CALL Grabar MOVFW bL ; bL se almacena en la dirección 05h MOVWF temp1L MOVLW 05h MOVWF temp1H CALL Grabar GOTO conv ; Se vuelve a la rutina principal para tomar un nuevo valor de voltaje. Error_CAL: CALL disp_ERROR ; Error en la calibración: debe ser abortada y reiniciada por el usuario. GOTO conv ; Se repite la rutina con un nuevo valor digital del voltaje.
;------------------------------------------------------------------------------------------------------------------------------------------ ; ------------------------ RUTINAS EMPLEADAS POR EL PROGRAMA PRINCIPAL -----------------------------------
Leer_eeprom: ; Rutina que devuelve el dato (en W) con dirección "temp1" en la EEPROM ; (tomada del data-sheet de la familia PIC16F87X de Microchip). MOVFW temp1 ; Data Memory BSF STATUS,6 ; BCF STATUS,5 ; Bank 2 MOVWF EEADR ; Address to read BSF STATUS,5 ; Bank 3 BCF EECON1,7 ; Point to Data memory BSF EECON1,0 ; EE Read BCF STATUS,5 ; Bank 2 MOVF EEDATA,W ; W = EEDATA BCF STATUS,6 ; BCF STATUS,5 ; Bank 0 RETURN ;-------------------------------------------------------------------- Auto_rango: ; Rutina que realiza un "autorango" para los datos de voltaje obtenidos de la conversión A/D; ; El autorango permite tener una mayor precisión a concentraciones bajas. MOVFW Vref ; Se toma el valor de calibración del voltaje de referencia (para saber desde MOVWF tempH ; qué referencia modificar el rango). MOVWF PORTB MOVLW 0xFF ; Se espera un cierto tiempo (para que la conversion D/A del voltaje de referencia MOVWF TMR0 ; se estabilice). CALL delay CALL ADC ; Se toma el dato de voltaje y se convierte a "digital". MOVFW ADRESH MOVWF vH BSF STATUS,5 ; Banco 1. MOVFW ADRESL BCF STATUS,5 ; Banco 0. MOVWF vM CLRF vL MOVLW B'00000010' ; Se observa si el voltaje está por encima de la mitad del máximo posible. SUBWF vH,0 BTFSC STATUS,0 GOTO fin_rango BCF STATUS,0 ; Se limpia el carry (para evitar problemas). RRF tempH,1 ; Dividir el voltaje de referencia en 2 (divide el rango en 2) MOVFW tempH ; Enviar datos al puerto B (en el que debe estar el conversor D/A). MOVWF PORTB MOVLW 0xFF ; Se espera un cierto tiempo (para que la conversion D/A del voltaje de referencia MOVWF TMR0 ; se estabilice).

IEL2-I-04-05
CALL delay CALL ADC ; Se toma el dato de voltaje y se convierte a "digital". MOVFW ADRESH MOVWF vH BSF STATUS,5 ; Banco 1. MOVFW ADRESL BCF STATUS,5 ; Banco 0. MOVWF vM CLRF vL BCF STATUS,0 ; Se limpia el carry (para evitar problemas). RRF vH,1 ; Se divide el dato de voltaje entre 2 RRF vM,1 RRF vL,1 MOVLW B'00000001' ; Se observa si el voltaje está por encima de la cuarta parte del máximo posible. SUBWF vH,0 BTFSC STATUS,0 GOTO fin_rango BCF STATUS,0 ; Se limpia el carry (para evitar problemas). RRF tempH,1 MOVFW tempH ; Enviar datos al puerto B (en el que debe estar el conversor D/A). MOVWF PORTB MOVLW 0xFF ; Se espera un cierto tiempo (para que la conversion D/A del voltaje de referencia MOVWF TMR0 ; se estabilice). CALL delay CALL ADC ; Se toma el dato de voltaje y se convierte a "digital". MOVFW ADRESH MOVWF vH BSF STATUS,5 ; Banco 1. MOVFW ADRESL BCF STATUS,5 ; Banco 0. MOVWF vM CLRF vL BCF STATUS,0 ; Se limpia el carry (para evitar problemas). RRF vH,1 ; Se divide el dato de voltaje entre 4 RRF vM,1 RRF vL,1 BCF STATUS,0 RRF vH,1 RRF vM,1 RRF vL,1 fin_rango: RETURN ;-------------------------------------------------------------------- ADC: ; Rutina que toma un dato de la entrada análoga seleccionada por ADCON0 realiza ; la conversión Análoga digital y almacena el resultado en ADRESH y ADRESL MOVLW 0xFF ; Se programa un tiempo de adquisición de 25 us MOVWF TMR0 ; Se realiza la precarga del contador. MOVLW 0x19 SUBWF TMR0,1 CALL delay ; Esperando por un tiempo de adquisición BSF ADCON0,2 ; Inicio de conversión BTFSC ADCON0,2 ; Espera fin de conversión GOTO $-1 RETURN ;-------------------------------------------------------------------- delay: ; Rutina de delay programable por software. MOVLW 0x03 SUBWF TMR0,0 BTFSC STATUS,0 GOTO delay RETURN

IEL2-I-04-05
;-------------------------------------------------------------------- Wait50ms: MOVLW D'200' ; Rutina que realiza una espera de 50 ms (aproximadamente). MOVWF tempL aca: MOVLW 05h ; Se programa un tiempo de espera de 250 us MOVWF TMR0 ; Se realiza la precarga del contador. CALL delay DECFSZ tempL GOTO aca RETURN ;-------------------------------------------------------------------- Sum24: ; Rutina que suma dos números (SUM1X y SUM2X) de 3 bytes y guarda el resultado en SUM1X. MOVFW SUM2L ; Suma de Bytes menos significativos ADDWF SUM1L,1 MOVFW SUM2M ; Suma de Bytes medios SKPNC INCFSZ SUM2M,0 ADDWF SUM1M,1 MOVFW SUM2H ; Bytes más significativos SKPNC INCFSZ SUM2H,0 ADDWF SUM1H,1 RETURN ;-------------------------------------------------------------------- Rest24: ; Rutina que realiza la resta de dos números de 3 Bytes: ; Se resta REST2 de REST1 y se almacena en REST1 MOVF REST2L,0 ; Resta entre los Bytes menos significativos. SUBWF REST1L MOVF REST2M,0 ; Resta de Bytes medios BTFSS STATUS,0 INCFSZ REST2M,0 SUBWF REST1M MOVF REST2H,0 ; Resta de Bytes más significativos BTFSS STATUS,0 INCFSZ REST2H,0 SUBWF REST1H RETURN ;-------------------------------------------------------------------- Mult24: ; Rutina de multiplicación (tomada de http://www.piclist.com/techref/microchip/math/mul/24x24b-tk.htm) ; Toma los números almacenados en Multiplier,Multiplier+1,Multiplier+2, los multiplica con Multipland, ; Multipland+1,Multipland+2 y almacena el resultado en Product (+0,1,2,..,5). ; En todos los casos, el Byte más significativo es el +0, y el menos, el de mayor offset (+2, en el caso ; de multipland y multiplier; +5 en el caso de product). CLRF Product ; clear destination CLRF Product+1 CLRF Product+2 MOVLW D'24' MOVWF BitCount ; number of bits RRF Product+3,F ; shift out to carry RRF Product+4,F ; next multiplier bit RRF Product+5,F ADD_LOOP_24x24: BTFSS STATUS,0 ; if carry is set we must add multipland to the product GOTO SKIP_LOOP_24x24 ; nope, skip this bit

IEL2-I-04-05
MOVF Multipland+2,W ; get LSB of multiplicand ADDWF Product+2,F ; add it to the lsb of the product MOVF Multipland+1,W ; middle byte BTFSC STATUS,0 ; check carry for overflow INCFSZ Multipland+1,W ; if carry set we add one to the source ADDWF Product+1,F ; and add it (if not zero, in that case mulitpland = 0xff->0x00 ) MOVF Multipland,W ; MSB byte BTFSC STATUS,0 ; check carry INCFSZ Multipland,W ADDWF Product,F ; handle overflow SKIP_LOOP_24x24: ; note carry contains most significant bit of addition here ; shift in carry and shift out; next multiplier bit, starting from less significant bit. RRF Product,F RRF Product+1,F RRF Product+2,F RRF Product+3,F RRF Product+4,F RRF Product+5,F DECFSZ BitCount,F GOTO ADD_LOOP_24x24 RETURN ;-------------------------------------------------------------------- Div24: nop ; Rutina de división (tomada de http://www.piclist.com/techref/microchip/math/div/24by24tn.htm). divizn movlw .24 ; MATH ROUTINES movwf BCount ; 24 / 24 Div --> 24 movf nratorH,w ; TONY NIXON's Algorithm movwf shiftH movf nratorM,w movwf shiftM movf nratorL,w movwf shiftL clrf nratorH clrf nratorM clrf nratorL clrf remainH clrf remainM clrf remainL dloop bcf STATUS,0 rlf shiftL,f rlf shiftM,f rlf shiftH,f rlf remainL,f rlf remainM,f rlf remainH,f movf denomH,w subwf remainH,w btfss STATUS,2 ; Flag "Z" goto nochk ; movf denomM,w subwf remainM,w btfss STATUS,2 goto nochk ; movf denomL,w subwf remainL,w nochk btfss STATUS,0 goto nogo ; movf denomL,w subwf remainL,f btfss STATUS,0 decf remainM,f

IEL2-I-04-05
movf remainM,w xorlw 0xff btfsc STATUS,2 decf remainH,f movf denomM,w subwf remainM,f btfss STATUS,0 decf remainH,f movf denomH,w subwf remainH,f bsf STATUS,0 nogo: rlf nratorL,f rlf nratorM,f rlf nratorH,f decfsz BCount,f goto dloop ; return ;-------------------------------------------------------------------- DivDec: ; Rutina que divide 2 números de 3 bytes (nratorX y denomX) en los que el byte menos significativo ; representa una parte decimal (punto fijo), y los almacena en RES_DIVX (con el mismo formato). ; El siguiente es el formato usado: ; H | M | L ; MSBy | LSBy | Decimales CALL Div24 MOVF nratorL,0 ; Procedimiento para el cálculo de decimales. MOVWF RES_DIVM ; (se almacenan en el byte menos significativo) MOVF nratorM,0 MOVWF RES_DIVH MOVF remainL,0 MOVWF nratorM MOVF remainM,0 MOVWF nratorH CALL Div24 ; se divide el residuo (*256) con el divisor. MOVF nratorL,0 ; se adicionan los decimales al resultado. MOVWF RES_DIVL RETURN ;-------------------------------------------------------------------- Grabar: ; Rutina que guarda los datos que se encuentran en el registro EEDATA en la EEPROM ; (tomada del data-sheet de la familia PIC16F87X de Microchip). ; Al entrar a la rutina, deben estar almacenados los valores de EEADR en temp1H y ; EEDATA en temp1L. BSF STATUS,6 ;Bank 3 BSF STATUS,5 BTFSC EECON1,1 ;Wait for write to complete. GOTO $-1 BCF STATUS,6 ;Bank 0 BCF STATUS,5 MOVF temp1H,0 ;Data Memory BSF STATUS,6 ;Bank 2 MOVWF EEADR ;Address to write BCF STATUS,6 ;Bank 0 BCF STATUS,5 MOVF temp1L,0 ;Data Memory Value BSF STATUS,6 ;Bank 2 MOVWF EEDATA ;to write BSF STATUS,5 ;Bank 3 BCF EECON1,7 ;Point to DATA memory BSF EECON1,2 ;Enable writes BTFSC INTCON,7 GOTO int_act ;Si las interrupciones están activadas, deben volver a prenderse.

IEL2-I-04-05
MOVLW 55h ; MOVWF EECON2 ;Write 55h MOVLW 0AAh ; MOVWF EECON2 ;Write AAh BSF EECON1,1 ;Set WR bit to begin write BCF EECON1,2 ;Disable writes BCF STATUS,6 ;Bank 0 BCF STATUS,5 RETURN int_act: BCF INTCON,7 ;Disable INTs. MOVLW 55h ; MOVWF EECON2 ;Write 55h MOVLW 0AAh ; MOVWF EECON2 ;Write AAh BSF EECON1,1 ;Set WR bit to begin write BSF INTCON,7 ;Enable INTs. BCF EECON1,2 ;Disable writes BCF STATUS,6 ;Bank 0 BCF STATUS,5 RETURN ;-------------------------------------------------------------------- Lcd: ; Rutina que envía los datos de concentración al controlador de LCD para que sean ; mostrados al usuario (adaptado del datasheet del circuito integrado AY0438 de Microchip). bcf LOAD ;make sure load is disabled movf LSD,w ;get least significant value movwf temp call DecodeValue ;decode the value call Send8 ;serially output the seg values movf SCNDSD,w ;get 2nd significant digit movwf temp call DecodeValue ;decode it call Send8 ;serially output it movf THRDSD,w ;get 3rd significant digit movwf temp call DecodeValue ;decode it call Send8 movf MSD,w ;get Most significant value movwf temp call DecodeValue ;decode it call Send8 ;serially send it bsf LOAD ;toggle the LOAD line to enable the latches bcf LOAD return Send8: ;Send8, sends the 8 bits in the W register movwf temp ;save in temp movlw .8 ;init count movwf count ;to 8 sendloop: bcf DATAIN ;make sure DATAIN is low rrf temp ;rotate value through carry btfsc STATUS,C ;if bit clear then skip bsf DATAIN ;else set data bit bsf CLK ;toggle clock bcf CLK ; / decfsz count ;see if 8 done goto sendloop ;no then do all return ;else return DecodeValue: movlw D'0' subwf temp,w btfsc STATUS,Z retlw B'11111100' ; Decodificar para 0 movlw D'1' subwf temp,w btfsc STATUS,Z retlw B'01100000' ; Decodificar para 1 movlw D'2'

IEL2-I-04-05
subwf temp,w btfsc STATUS,Z retlw B'11011010' ; Decodificar para 2 movlw D'3' subwf temp,w btfsc STATUS,Z retlw B'11110010' ; Decodificar para 3 movlw D'4' subwf temp,w btfsc STATUS,Z retlw B'01100110' ; Decodificar para 4 movlw D'5' subwf temp,w btfsc STATUS,Z retlw B'10110110' ; Decodificar para 5 movlw D'6' subwf temp,w btfsc STATUS,Z retlw B'10111110' ; Decodificar para 6 movlw D'7' subwf temp,w btfsc STATUS,Z retlw B'11100000' ; Decodificar para 7 movlw D'8' subwf temp,w btfsc STATUS,Z retlw B'11111110' ; Decodificar para 8 movlw D'9' subwf temp,w btfsc STATUS,Z retlw B'11110110' ; Decodificar para 9 movlw D'20' subwf temp,w btfsc STATUS,Z retlw B'11101110' ; Decodificar para "A" movlw D'21' subwf temp,w btfsc STATUS,Z retlw B'10011100' ; Decodificar para "C" movlw D'22' subwf temp,w btfsc STATUS,Z retlw B'10011110' ; Decodificar para "E" movlw D'23' subwf temp,w btfsc STATUS,Z retlw B'00011100' ; Decodificar para "L" movlw D'24' subwf temp,w btfsc STATUS,Z retlw B'00101010' ; Decodificar para "n" movlw D'25' subwf temp,w btfsc STATUS,Z retlw B'00001010' ; Decodificar para "r" retlw B'00000000' ; Decodificar para "vacío". ;-------------------------------------------------------------------- disp_CAL: ; Mostrar la palabra "CAL" por algunos segundos. MOVLW D'26' MOVWF MSD MOVLW D'21' ; Se mostrará | | C | A | L | MOVWF THRDSD MOVLW D'20' MOVWF SCNDSD MOVLW D'23' MOVWF LSD CALL Lcd MOVLW D'40' ; durante 40*(50ms)= 2seg MOVWF temp espera1: CALL Wait50ms

IEL2-I-04-05
DECFSZ temp GOTO espera1 RETURN ;-------------------------------------------------------------------- disp_ERROR: ; Mostrar la palabra "Err" por algunos segundos. MOVLW D'26' MOVWF MSD MOVLW D'22' ; Se mostrará | | E | r | r | MOVWF THRDSD MOVLW D'25' MOVWF SCNDSD MOVLW D'25' MOVWF LSD CALL Lcd MOVLW D'40' ; durante 40*(50ms)= 2seg MOVWF temp espera2: CALL Wait50ms DECFSZ temp GOTO espera2 RETURN ;-------------------------------------------------------------------- Vref_CAL:; Rutina que realiza la autocalibración (selecciona la amplificación) de la señal de voltaje. MOVLW B'10000000' ; Variables temporales empleadas en la rutina. MOVWF temp1H CLRF temp1M ; MSB de n1. CLRF temp1L ; MSB de v1. MOVLW D'5' ; Número de modificaciones de Vref (cuantas veces puede dividirse la referencia por 2). MOVWF temp2H MOVLW B'10000000' ; Se "inicializa" el valor de Vref para comenzar a hacer el barrido. MOVWF Vref MOVFW Vref ; Se envía Vref al puerto B (para su conversión D/A). MOVWF PORTB MOVLW 0xFF ; Se espera un cierto tiempo (para que la conversion D/A se estabilice). MOVWF TMR0 CALL delay BCF STATUS,0 ; Se limpia el carry para hacer máscaras de con un solo '1'. MOVLW D'8' ; Se empieza recorriendo n1 desde el bit más significativo. MOVWF BCount MSBn1H: MOVFW temp1H ; Se ubica el MSB de n1: se mira en qué lugar coincide la máscara (temp1H) con ANDWF n1H,0 ; el resultado de "temp1H and n1H". SUBWF temp1H,0 BTFSC STATUS,2 GOTO n_H BCF STATUS,0 ; Se limpia el carry para no introducir más '1's a las máscaras. RRF temp1H,1 DECFSZ BCount GOTO MSBn1H MOVLW B'10000000' MOVWF temp1H MOVLW D'8' ; Si se llega acá, es porque n1H es cero. Debe procederse a mirar n1M MOVWF BCount MSBn1M: MOVFW temp1H ; Se ubica el MSB de n1: se mira en qué lugar coincide la máscara (temp1H) con ANDWF n1M,0 ; el resultado de "temp1H and n1M". SUBWF temp1H,0 BTFSC STATUS,2 GOTO n_M BCF STATUS,0 ; Se limpia el carry para hacer máscaras con un solo '1'. RRF temp1H,1 DECFSZ BCount GOTO MSBn1M GOTO MSBn1 n_H: MOVLW D'8' ; Si sale de la subrutina vH, debe sumarse 7 a BCount para saber el MSB. ADDWF BCount,1 n_M: DECF BCount,1 ; Si sale de la subrutina vM, debe restarse 1 a BCount para saber el MSB. MSBn1: MOVFW BCount ; Se guarda el valor del MSB de n1.

IEL2-I-04-05
MOVWF temp1M conver: CALL ADC ; Se toma el dato de voltaje y se convierte a "digital". MOVFW ADRESH MOVWF v1H BSF STATUS,5 ; Banco 1. MOVFW ADRESL BCF STATUS,5 ; Banco 0. MOVWF v1M CLRF v1L MOVLW B'10000000' MOVWF temp1H MOVLW D'8' ; Se ubica el MSB de v1: se mira en qué lugar coincide la máscara (temp1H) con MOVWF BCount ; el resultado de "temp1H and v1H". MSBv1H: MOVFW temp1H ANDWF v1H,0 SUBWF temp1H,0 BTFSC STATUS,2 GOTO v_H BCF STATUS,0 ; Se limpia el carry para no introducir más '1's a las máscaras. RRF temp1H,1 DECFSZ BCount GOTO MSBv1H MOVLW B'10000000' MOVWF temp1H MOVLW D'8' ; Si se llega acá, es porque v1H es cero. Debe procederse a mirar v1M MOVWF BCount MSBv1M: MOVFW temp1H ; Se ubica el MSB de v1: se mira en qué lugar coincide la máscara (temp1H) con ANDWF v1M,0 ; el resultado de "temp1H and v1M". SUBWF temp1H,0 BTFSC STATUS,2 GOTO v_M BCF STATUS,0 ; Se limpia el carry para hacer máscaras con un solo '1'. RRF temp1H,1 DECFSZ BCount GOTO MSBv1M GOTO MSBv1 v_H: MOVLW D'8' ; Si sale de la subrutina vH, debe sumarse 7 a BCount para saber el MSB. ADDWF BCount,1 v_M: DECF BCount,1 ; Si sale de la subrutina vM, debe restarse 1 a BCount para saber el MSB. MSBv1: MOVFW BCount ; Se guarda el valor del MSB de v1. MOVWF temp1L MOVLW D'03' ; Se verifica si el MSB de v1 está a 3 posiciones o menos del de n1. ADDWF temp1L,0 SUBWF temp1M,0 BTFSC STATUS,2 ; En caso que el MSB de v1 esté 3 posiciones por debajo del de n1. GOTO FIN_BIEN BTFSS STATUS,0 ; En caso que el MSB de v1 esté a menos de 3 posiciones por debajo del de n1. GOTO FIN_BIEN BCF STATUS,0 ; Se limpia el carry para no introducir más '1's a las máscaras. RRF Vref,1 ; Se divide Vref por 2 (amplifica la señal de voltaje por 2). MOVFW Vref ; Enviar datos al puerto B (en el que debe estar el conversor D/A). MOVWF PORTB MOVLW 0xFF ; Se espera un cierto tiempo (para que la conversion D/A se estabilice). MOVWF TMR0 CALL delay DECFSZ temp2H GOTO conver ; Si no se ha excedido el máximo de divisiones, se vuelve a una nueva conversión GOTO FIN_MAL ; y se repite el procedimiento. FIN_BIEN: MOVLW 00h ; Si la rutina termina bien, se deja el flag Z en 0. ADDLW 0Fh RETURN FIN_MAL: MOVLW 00h ; Si la rutina termina mal, se hace Z=1 (para indicar error). ANDLW 00h RETURN

IEL2-I-04-05
;-------------------------------------------------------------------- Tomar_datos:; Rutina que toma 4 datos del teclado (mostrándolos por un LCD, para comprensión del usuario) ; y los convierte en un número binario. MOVLW D'26' ; Mostrar la palabra "x" hasta que se presione un botón del teclado (en MOVWF MSD ; este caso, n1). MOVLW D'26' ; Se mostrará | | |temp1|temp2| MOVWF THRDSD MOVFW tempH MOVWF SCNDSD MOVFW tempM MOVWF LSD CALL Lcd CALL Un_dato ; Se toma el primer dato del teclado (la rutina Tomar_dato devuelve el MOVLW D'11' ; resultado en temp). Si se introduce un número mayor que 11, se SUBWF temp,W ; asume como 0. BTFSC STATUS,Z ; Si el valor no es "Cal", se puede proseguir con la toma de datos. GOTO disp_CAL ; En caso contrario, se vuelve a iniciar la rutina. MOVLW D'10' ; SUBWF temp,W BTFSC STATUS,Z ; Si el valor no es "enter", se puede proseguir con la toma de datos. GOTO Tomar_datos ; En caso contrario, se vuelve a iniciar la toma de datos. MOVLW D'26' ; Se mostrará | | | |dígito| MOVWF SCNDSD MOVFW temp MOVWF LSD CALL Lcd ciclo: CALL Un_dato ; Otros dígitos. MOVLW D'11' ; SUBWF temp,W BTFSC STATUS,Z ; Si el valor no es "Cal", se puede proseguir con la toma de datos. GOTO disp_CAL ; En caso contrario, se vuelve a iniciar la rutina. MOVLW D'10' ; SUBWF temp,W BTFSC STATUS,Z ; Si el valor no es "enter", se puede proseguir con la toma de datos. GOTO Bcd_Bin ; En caso contrario, se ha terminado la rutina y se pasa a la conversión. MOVFW THRDSD ; Se mostrará |dígito|dígito|dígito|dígito| MOVWF MSD MOVFW SCNDSD MOVWF THRDSD MOVFW LSD MOVWF SCNDSD MOVFW temp MOVWF LSD CALL Lcd GOTO ciclo Bcd_Bin: MOVLW D'10' ; Si se ha introducido un número mayor que 11, se asume como 0. SUBWF LSD,W BTFSC STATUS,C CLRF LSD MOVLW D'10' ; Si se ha introducido un número mayor que 11, se asume como 0. SUBWF SCNDSD,W BTFSC STATUS,C CLRF SCNDSD MOVLW D'10' ; Si se ha introducido un número mayor que 11, se asume como 0. SUBWF THRDSD,W BTFSC STATUS,C CLRF THRDSD MOVLW D'10' ; Si se ha introducido un número mayor que 11, se asume como 0. SUBWF MSD,W BTFSC STATUS,C CLRF MSD MOVLW D'0' ; Se realiza el cálculo de las unidades de mil: MOVWF Multipland ; Pasar valores de MSD a registros de multiplicación. MOVLW D'0' MOVWF Multipland+1

IEL2-I-04-05
MOVFW MSD MOVWF Multipland+2 MOVLW 00h ; Multiplicar por 1000 (03E8h). MOVWF Multiplier MOVLW 03h MOVWF Multiplier+1 MOVLW 0E8h MOVWF Multiplier+2 CALL Mult24 MOVFW Product+3 ; Pasar valores de 1000*MSD a registros temporales. MOVWF tempH MOVFW Product+4 MOVWF tempM MOVFW Product+5 MOVWF tempL MOVLW D'0' ; Se realiza el cálculo de las centenas:
MOVWF Multipland ; Pasar valores de THRDSD a registros de multiplicación. MOVLW D'0' MOVWF Multipland+1 MOVFW THRDSD MOVWF Multipland+2 MOVLW 00h ; Multiplicar por 100 (64h). MOVWF Multiplier MOVLW 00h MOVWF Multiplier+1 MOVLW 64h MOVWF Multiplier+2 CALL Mult24 MOVFW Product+3 ; Hacer 1000*MSD + 100*THRDSD y guardar el resultado en registros temporales. MOVWF SUM1H MOVFW Product+4 MOVWF SUM1M MOVFW Product+5 MOVWF SUM1L MOVFW tempH MOVWF SUM2H MOVFW tempM MOVWF SUM2M MOVFW tempL MOVWF SUM2L CALL Sum24 MOVFW SUM1H MOVWF tempH MOVFW SUM1M MOVWF tempM MOVFW SUM1L MOVWF tempL MOVLW D'0' ; Se realiza el cálculo de las decenas: MOVWF Multipland ; Pasar valores de SCNDSD a registros de multiplicación. MOVLW D'0' MOVWF Multipland+1 MOVFW SCNDSD MOVWF Multipland+2 MOVLW 00h ; Multiplicar por 10 (0Ah). MOVWF Multiplier MOVLW 00h MOVWF Multiplier+1 MOVLW 0Ah MOVWF Multiplier+2 CALL Mult24 MOVFW Product+3 ; Hacer (1000*MSD + 100*THRDSD) + 10*SCNDSD y guardar el resultado en registros temporales. MOVWF SUM1H MOVFW Product+4 MOVWF SUM1M MOVFW Product+5 MOVWF SUM1L MOVFW tempH

IEL2-I-04-05
MOVWF SUM2H MOVFW tempM MOVWF SUM2M MOVFW tempL MOVWF SUM2L CALL Sum24 MOVFW D'0' ; Hacer ((1000*MSD + 100*THRDSD) + 10*SCNDSD) + LSD y guardar el resultado en los registros "datos". MOVWF SUM2H MOVFW D'0' MOVWF SUM2M MOVFW LSD MOVWF SUM2L CALL Sum24 MOVFW SUM1M MOVWF temp1H MOVFW SUM1L MOVWF temp1M CLRF temp1L RETURN ;-------------------------------------------------------------------- Un_dato:; Rutina que toma un dato del teclado conectado al microcontrolador por el puerto D. BTFSS PORTD,7 ; Se espera a que haya un dato válido. GOTO $-1 CALL Wait50ms ; Se esperan 50ms para que se estabilice la señal. MOVFW PORTD ; Se toma el valor presente en el puerto. ANDLW B'01111000' MOVWF temp ; Se organiza y se guarda en "temp". BCF STATUS,C RRF temp,1 RRF temp,1 RRF temp,1 BTFSC PORTD,7 ; Se espera a que se suelte el botón. GOTO $-1 CALL Wait50ms CALL Wait50ms RETURN END