Cómo funciona y qué debe ofrecer el software para comercio electrónico

ESCUELA UNIVERSITARIA POLITÉCNICA
DE LA ALMUNIA DE DOÑA GODINA (ZARAGOZA)
ANEXOS
DISEÑO ELECTRÓNICO Y SOFTWARE
DE CONTROL PARA BRAZO ROBOTICO DE
6 GRADOS DE LIBERTAD
ELECTRONIC DESIGN AND CONTROL
SOFTWARE ROBOTIC ARM OF 6 DEGREES
OF FREEDOM
424.17.65
Autor:
Director:
Fecha:
José Javier Alonso Montesinos
Javier Esteban Escaño
27/06/2018


DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
INDICES
Autor: José Javier Alonso Montesinos - i –
424.17.65
INDICE DE CONTENIDO
ANEXO 1. (PLANOS) ________________________________________________________________ 1
ANEXO 2. (PRESUPUESTO) ___________________________________________________________ 3
2.1. COSTE COMPONENTES ADQUIRIDOS ________________________________________________ 3
ANEXO 3. (PLIEGO DE CONDICIONES) __________________________________________________ 5
3.1. DEFINICIÓN Y ALCANCE DEL PLIEGO _________________________________________________ 5
3.2. NORMAS, LEYES Y REGLAMENTOS __________________________________________________ 5
ANEXO 4. DOCUMENTACIÓN COMERCIAL ______________________________________________ 6
ANEXO 5. PROGRAMACIÓN EMPLEADA _______________________________________________ 19
INDICE DE ILUSTRACIONES
Ilustración 1 Programación Apk ................................................................ 20
Ilustración 2 Programación prueba potenciómetro ....................................... 21
Ilustración 3 Programación final Bluetooth .................................................. 25
INDICE DE TABLAS
Tabla 1 Coste componentes electrónicos ...................................................... 3
Tabla 2 Coste componentes mecánicos ........................................................ 4


DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
(Planos)
Autor: José Javier Alonso Montesinos - 1 –
424.17.65
ANEXO 1. (PLANOS)
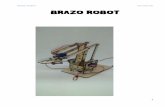
Incluimos un índice detallado de todos los planos mecánicos diseñados que han
sido necesarios para la construcción del brazo robótico.
Planos Brazo Robótico
Ensamblaje General 424.17.65.000
U.F. Base
Ensamblaje Base 424.17.65.100
Soporte Base 424.17.65.101
Tapa Base 424.17.65.102
Acople Base 424.17.65.103
Cover Base 424.17.65.104
Anclaje Servo KPOWER 424.17.65.105
U.F. Hombro
Ensamblaje Hombro 424.17.65.200
Hombro 424.17.65.201
Unión Hombro 424.17.65.202
U.F. Codo
Ensamblaje Codo 424.17.65.300
Codo A 424.17.65.301
Codo B 424.17.65.302
Codo C 424.17.65.303
Codo D 424.17.65.304
Codo E1 424.17.65.305
Codo E2 424.17.65.306
Codo F 424.17.65.307
Anclaje Servo Futaba 424.17.65.308

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
(Planos)
- 2 - Autor: José Javier Alonso Montesinos
424.17.65
U.F. Muñeca
Ensamblaje muñeca 424.17.65.400
Muñeca A 424.17.65.401
Muñeca B 424.17.65.402
Muñeca C 424.17.65.403
Muñeca D 424.17.65.404
Muñeca E 424.17.65.405
Muñeca F 424.17.65.406

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
(Presupuesto)
Autor: José Javier Alonso Montesinos - 3 –
424.17.65
ANEXO 2. (PRESUPUESTO)
2.1. COSTE COMPONENTES ADQUIRIDOS
ELECTRÓNICA
Servomotores Cantidad
Servomotor TowerPro MG995 1 9,8€
Servomotor KPOWER DM4000 1 54,5€
Servomotor Futaba S3003 1 3,5€
Servomotor TowerPro MG90S 3 3,2€
Servomotor HS-55 1 9,5€
Arduino
Arduino Mega 1 11,99€
Módulo bluetooth HC-06 1 5,5€
Cables Conexiones 120 Unidades 1,35€
Total 105,74€
Tabla 1 Coste componentes electrónicos

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
(Presupuesto)
- 4 - Autor: José Javier Alonso Montesinos
424.17.65
IMPRESIÓN 3D / ENSAMBLE MECÁNICO
Filamento Pla 1,75 (1kg) 1 18,99
Tornillo aglomerado
M2,5x16mm
30 1,2€
Tuerca M3 30 0,75€
Tornillo cabeza allen
M3x30mm (DIN 912)
30 1,3€
Tornillo M3x25mm
(DIN EN ISO 7046)
30 0,75€
Tornillo M3x20mm
(DIN EN ISO 7046)
30 075€
Tornillo M3x12mm
(DIN 912)
30 1,3€
TOTAL 25,04€
Tabla 2 Coste componentes mecánicos
TOTAL COMPONENTES COMERCIALES 105,74€ + 25,04 = 130,78€
Contando que es un prototipo educativo con este presupuesto podríamos diseñar este
brazo robótico, sin incluir la impresora 3D que es propia, y la fuente de alimentación
que reutilizamos una fuente ATX de un ordenador antiguo.

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
(Pliego de condiciones)
Autor: José Javier Alonso Montesinos - 5 –
424.17.65
ANEXO 3. (PLIEGO DE CONDICIONES)
3.1. DEFINICIÓN Y ALCANCE DEL PLIEGO
El sistema diseñado durante el proyecto se trata de un manipulador, como tal, el
pliego de condiciones aquí expuesto contiene toda la información para la seguridad y
diseño de dispositivos robóticos.
3.2. NORMAS, LEYES Y REGLAMENTOS
El sistema final deberá cumplir las siguientes normas adaptándose al uso del robot
de uso didáctico.
Norma ISO 10218 no es aplicable a robots no industriales, aunque los principios
de seguridad establecidos pueden ser utilizador para el ámbito del manipulador de
nuestro proyecto. Esta norma la complementaremos con las siguientes que se
mencionan:
- ISO 10218-2, Robots y dispositivos robóticos. Requisitos de seguridad para
robots industriales. Parte 2: Sistemas robot e integración.
- ISO 12100, Seguridad de las máquinas. Conceptos básicos, principios
generales para el diseño.
- ISO 13849-1:2006, Seguridad de las maquinas. Partes de los sistemas de
mando relativas a la seguridad. Parte 1: Principios generales para el diseño.
- ISO 13850, Seguridad de las maquinas: Parada de emergencia. Principios
para el diseño.
- IEC 60204-1, Seguridad de las maquinas. Equipo eléctrico de las maquinas.
Parte 1: Requisitos generales.
- IEC 62061:2005, Seguridad de las maquinas. Seguridad de sistemas de
mando eléctricos, electrónicos y electrónicos programables relativos a la
seguridad.
- Reglamento Electrotécnico de Baja Tensión, Real Decreto 842/2002.

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
- 6 - Autor: José Javier Alonso Montesinos
424.17.65
ANEXO 4. DOCUMENTACIÓN COMERCIAL
En este apartado del anexo vamos a incluir toda a documentación de los
componentes comerciales que hemos necesitado para llevar a cabo el prototipo.
Componentes comerciales:
1. Filamento Pla 1,75 (1kg)
2. Tornillo aglomerado M2,5x16mm
3. Tuerca M3 (DIN439-2)
4. Tornillos cabeza allen (DIN 912)
5. Tornillos (DIN EN ISO 7046)
6. Servomotor TowerPro MG995
7. Servomotor KPOWER DM4000
8. Servomotor Futaba S3003
9. Servomotor TowerPro MG90S
10. Servomotor HS-55
11. Arduino Mega
12. Módulo bluetooth HC-06

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
Autor: José Javier Alonso Montesinos - 7 –
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
- 8 - Autor: José Javier Alonso Montesinos
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
Autor: José Javier Alonso Montesinos - 9 –
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
- 10 - Autor: José Javier Alonso Montesinos
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
Autor: José Javier Alonso Montesinos - 11 –
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
- 12 - Autor: José Javier Alonso Montesinos
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
Autor: José Javier Alonso Montesinos - 13 –
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
- 14 - Autor: José Javier Alonso Montesinos
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
Autor: José Javier Alonso Montesinos - 15 –
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
- 16 - Autor: José Javier Alonso Montesinos
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
Autor: José Javier Alonso Montesinos - 17 –
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Documentación Comercial
- 18 - Autor: José Javier Alonso Montesinos
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Programación empleada
Autor: José Javier Alonso Montesinos - 19 –
424.17.65
ANEXO 5. PROGRAMACIÓN EMPLEADA
En este apartado incluimos toda la programación empleada para el desarrollo del
brazo robótico, incluyendo la prueba del servo, el desarrollo de la programación para la
aplicación, y el programa de Arduino.
Programación Apk

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Programación empleada
- 20 - Autor: José Javier Alonso Montesinos
424.17.65
Ilustración 1 Programación Apk

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Programación empleada
Autor: José Javier Alonso Montesinos - 21 –
424.17.65
Programación Arduino prueba potenciómetro
Ilustración 2 Programación prueba potenciómetro

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Programación empleada
- 22 - Autor: José Javier Alonso Montesinos
424.17.65
Programación Arduino aplicación bluetooth final

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Programación empleada
Autor: José Javier Alonso Montesinos - 23 –
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Programación empleada
- 24 - Autor: José Javier Alonso Montesinos
424.17.65

DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
Programación empleada
Autor: José Javier Alonso Montesinos - 25 –
424.17.65
Ilustración 3 Programación final Bluetooth


DISEÑO ELECTRÓNICO Y SOFTWARE DE CONTROL PARA
BRAZO ROBOTICO DE 6 GRADOS DE LIBERTAD
424.17.65
Relación de documentos
(_) Memoria ............................................ 60 páginas
(X) Anexos ............................................. 25 páginas
Planos ............................................. 26 páginas
La Almunia, a 27 de Junio de 2018
Firmado: José Javier Alonso Montesinos

Unidad Funcional Pinza15424.17.65.400424.17.65.400Unidad Funcional Muñeca14424.17.65.300424.17.65.300Unidad Funcional Codo13424.17.65.200424.17.65.200Unidad Funcional Hombro12424.17.68.100424.17.68.100Unidad Funcional Base11
MATERIAL/OBSERVACIONESNº PLANO / ABRE. NORMADENOMINACIÓN Y CARACTERISTICASCTDADMARCA
Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALA
Observaciones de plano
Coment:
Observaciones GeneralesProyecto:Palabras clave:Empresa:Estado del proyecto:Versión:
ESCUELA UNIVERSITARIA POLITECNICALa Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
Formato:Plano nº: de: JJ.Alonso
07/06/2018
UNE/DIN-ISO
1:2 ENSAMBLAJE FINALBRAZO ROBOTICO
A3
EuplaEn curso
V8
424.17.65.000424.17.65Ensamblaje_Final.idw
BRAZO ROBOTICO
1 1
1
2
3
4
5

Acero, suaveDIN 439-2Tuerca M3412AceroDIN 7051Tornillo 2,9 x13811PLA424.17.65.105Anclaje servo KPOWER DM4000410Servo KPOWER DM4000 Servo KPOWER DM40029AceroDIN 912Tornillo M3x20 48Servo MG995 Servo Tower Pro MG99517Acero, suaveDIN 912Tornillo M3x1616Acero, suaveDIN 912Tornillo M3x1245PLA424.17.65.104Cover Base14PLA424.1765.103Acople Base13PLA424.17.65.102Tapa Base12PLA424.17.65.101Soporte Base11
MATERIAL/OBSERVACIONESNº PLANO / ABRE. NORMADENOMINACIÓN Y CARACTERISTICASCTDADMARCA
Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALA
Observaciones de plano
Coment:
Observaciones GeneralesProyecto:Palabras clave:Empresa:Estado del proyecto:Versión:
ESCUELA UNIVERSITARIA POLITECNICALa Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
Formato:Plano nº: de: JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:2 UNIDAD FUNCIONAL BASEENSAMBLAJE BASE
A3
EuplaEn curso
V5
424.17.65.100424.17.65Ensamblaje_Base_100.idw
BRAZO ROBOTICO
1 1
9 10
6
11
4
3
1
2
5
128
7

ESCALA 1:2
Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALA
Observaciones de plano
Coment:
Observaciones GeneralesProyecto:Palabras clave:Empresa:Estado del proyecto:Versión:
ESCUELA UNIVERSITARIA POLITECNICALa Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
Formato:Plano nº: de: JJ.Alonso
22/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL BASESOPORTE BASE
A3
BRAZO ROBOTICOBRAZO ROBOTICO
EUPLAEn curso
V3
424.17.65.101424.17.65Soporte_base_101.idw
BRAZO ROBOTICO
1 1
*Plano TFG previo 426.16.34.101
5
70
9,97 17,97
80
19,07
3325,21 23,05
Ø3
8,27
31,73
19,07
Ø3
Ø3
58 5
140
10
Ø140
Ø150
26
Ø5.5
78

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALA
Observaciones de plano
Coment:
Observaciones GeneralesProyecto:Palabras clave:Empresa:Estado del proyecto:Versión:
ESCUELA UNIVERSITARIA POLITECNICALa Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
Formato:Plano nº: de: JJ.Alonso
06/04/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL BASETAPA BASE
A3
BRAZO ROBOTICOBRAZO ROBOTICO
EUPLAEn curso
V6
424.17.65.102424.17.65Tapa_Base_102.idw
BRAZO ROBOTICO
1 1
35,5
6,35
150
49,1
10,1
12
75
3
14,05
5
15
5
139,6
4,82,3
5,5 3

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ. ALONSO
07/04/2018
UNE/DIN-ISO
1:1 Unidad Funcional BaseAcople Base
424.17.65.103424.17.65Acople_Base_103.idw
BRAZO ROBOTICO
6
55
5
9,75
R2,5
M3
11,4
27,5

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:2 UNIDAD FUNCIONAL BASECOVER BASE
424.17.65.104424.17.65Cover_Base_104.idw
BRAZO ROBOTICO
139,6
55,6R2,8
82,6
6,6
20
5,7510
78
39
5,6
3
R4
4231,5
2
2
2,5

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
2:1 UNIDAD FUNCIONAL BASEANCLAJE_SERVO_KPOWER
424.17.65.105424.17.65Anclaje_Servo_KPOWER_105.idw
BRAZO ROBOTICO
287
2,4

AceroDIN EN ISO 7051Tornillo M2,2x6,528Servo Futaba Acople Servo Futaba S300317AceroDIN EN ISO 7046Tornillo M3x1246Acople KPOWERDM4000 Acople Servo KPOWERDM400025Acero, suaveDIN 439-2Tuerca M384Acero, suaveDIN 912Tornillo M3x1243PLA424.17.65.202Union Hombro12PLA424.17.65.201Hombro21
MATERIAL/OBSERVACIONESNº PLANO / ABRE. NORMADENOMINACIÓN Y CARACTERISTICASCTDADMARCA
Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALA
Observaciones de plano
Coment:
Observaciones GeneralesProyecto:Palabras clave:Empresa:Estado del proyecto:Versión:
ESCUELA UNIVERSITARIA POLITECNICALa Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
Formato:Plano nº: de: JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL HOMBROENSAMBLAJE HOMBRO
A3
EuplaEn curso
V5
424.17.65.200424.17.65Ensamblaje_Hombro_200.idw
BRAZO ROBOTICO
1 1
3
4
2
6
7 8
1
5

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:2 UNIDAD FUNCIONAL HOMBROHOMBRO
44.17.65.201424.17.65HOMBRO_201.idw
BRAZO ROBOTICO
R18
10,6
55
R25
19,5
R23
55
60
8
75
3,470

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL HOMBROUNION HOMBRO
44.17.65.202424.17.65UNION_HOMBRO_202.idw
BRAZO ROBOTICO
40 49
24
24 3,5
16
7
R8
4,5

AceroDIN EN ISO 7051Tornillo M2,2 x 6,5 213Servo MG90S Servo Towerpro MG90S112AceroDIN EN ISO 7051Tornillo M2,2 x 9,5 411PLA424.17.65.308Anclaje Servo Futaba S3003210Futaba S3003 Servo motor Futaba S300319Acero bricomatadoehs 1410J67Tornillo aglomerado M2,5 x16 168PLA424.17.65.307Codo F17PLA424.17.65.305Codo E116PLA424.17.65.306Codo E215PLA424.17.65.304Codo D24PLA424.17.65.302Codo B13PLA424.17.65.303Codo C22PLA424.17.68.301Codo A11
MATERIAL/OBSERVACIONESNº PLANO / ABRE. NORMADENOMINACIÓN Y CARACTERISTICASCTDADMARCA
Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALA
Observaciones de plano
Coment:
Observaciones GeneralesProyecto:Palabras clave:Empresa:Estado del proyecto:Versión:
ESCUELA UNIVERSITARIA POLITECNICALa Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
Formato:Plano nº: de: JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL CODOENSAMBLAJE CODO
A3
EuplaEn curso
V4
424.17.65.300424.17.65Ensamblaje_Codo_300.idw
BRAZO ROBOTICO
1 1
1
3
11
10
9
2 4
5
6
7
8
12
13

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL CODOCODO A
424.7.65.301424.17.65Codo_A_301.idw
BRAZO ROBOTICO
72,5
R3
46.8
25 30,8
2
42
20
6 5,5
2.9
1015 1012
16,5 49 3,5
2,5
R3

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL CODOCODO B
424.17.65.302424.17.65Codo_B_302.idw
BRAZO ROBOTICO
10
7
236 25
2,5
15 10
13,5
72
41
8,2 8,2
33,3 7,75
R3

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL CODOCODO C
424.17.65.303424.17.65Codo_C_303.idw
BRAZO ROBOTICO
15 25
2
51,4
6 3
R6
2010
R2
6
12
29,4

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
2:1 UNIDAD FUNCIONAL CODOCODO D
424.17.65.304424.17.65Codo_D_304.idw
BRAZO ROBOTICO
25,75
7.4
R4
19
2
316
12

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL CODOCODO D
424.17.65.305424.17.65Codo_E1_305.idw
BRAZO ROBOTICO
8
26 12,2
2
11,9
6,5
3
7,4
32,7
12,65
6,3
16,3

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL CODOCODO E2
424.17.65.306424.17.65Codo_E2_306.idw
BRAZO ROBOTICO
2
2
8
32,7
26 3
6,3
6,9
12,2
6,5
3,25
16,3

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL CODOCODO F
424.17.65.307424.17.65Codo_F_307.idw
BRAZO ROBOTICO
251,5
32,722,7
53,3 R8
2,54,5
12
6,5
124,5

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
2:1 UNIDAD FUNCIONAL CODOANCLAJE SERVO FUTABA
424.17.65.308424.17.65Anclaje_Servo_Futaba_308.idw
BRAZO ROBOTICO
620
2,42
10

Acople servo Tower Pro MG90S210Servo MG90S Servo Tower Pro MG90S29AceroDIN EN ISO 7051Tornillo M2,2 x 6,568Acero bricomatadoehs 1410J67Tornillo aglomerado M2,5x1667PLA424.17.65.406Muñeca F16PLA424.17.65.405Muñeca E15PLA424.17.65.404Muñeca D14PLA424.17.65.403Muñeca C13PLA424.7.65.402Muñeca B12PLA424.17.65.401Muñeca A11
MATERIAL/OBSERVACIONESNº PLANO / ABRE. NORMADENOMINACIÓN Y CARACTERISTICASCTDADMARCA
Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALA
Observaciones de plano
Coment:
Observaciones GeneralesProyecto:Palabras clave:Empresa:Estado del proyecto:Versión:
ESCUELA UNIVERSITARIA POLITECNICALa Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
Formato:Plano nº: de: JJ.Alonso
31/05/2018
UNE/DIN-ISO
2:1 UNIDAD FUNCIONAL MUÑECAENSAMBLAJE MUÑECA
A3
EuplaEn curso
V1
424.17.65.400424.17.65Ensamblaje_Muñeca_400.idw
BRAZO ROBOTICO
1 1
13
2
5
64
7
8
9
10

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL MUÑECAMUÑECA A
424.17.65.401424.17.65Muñeca_A_401.idw
BRAZO ROBOTICO
39
3
256,5 12
,5
36
1,5
3,5 11,5 3
8
2
6
1,5

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
2:1 UNIDAD FUNCIONAL MUÑECAMUÑECA B
424.17.65.402424.17.65Muñeca_B_402.idw
BRAZO ROBOTICO
24,9
2,45
40,6
11,33
R64,1
7
R3
2
R6
17,5
3,2
6
12
62,7
4,6
R12,45 3,9
12,45

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL MUÑECAMUÑECA C
424.17.65.403424.17.65Muñeca_C_403.idw
BRAZO ROBOTICO
24,9
2,45
6,4
12
R3
6
7,455
1,7
14
10
6
11,3
7,2 5
2,45
6
R6
33,2
8,2
2,9

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
1:1 UNIDAD FUNCIONAL MUÑECAMUÑECA D
424.17.65.404424.17.65Muñeca_D_404.idw
BRAZO ROBOTICO
2
34
28
12
25
6,5
35,5
3
6,5
10,5
1,5
12,5
R6
R3,5
3,5
3
R8
15,5
2,5

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
2:1 UNIDAD FUNCIONAL MUÑECAMUÑECA E
424.17.65.405424.17.65Muñeca_E_405.idw
BRAZO ROBOTICO
24,9
31,6
28
8,25
R612
3 6
2,45
R12,45
2,49

Dibujado
Idem.s.normasComprobado
Fecha Nombre
ESCALAESCUELA UNIVERSITARIA POLITECNICA
La Almunia de Dª Godina -ZARAGOZA-Nº P.: Nº O.: Nom.Ar.:
JJ.Alonso
31/05/2018
UNE/DIN-ISO
2:1 UNIDAD FUNCIONAL MUÑECAMUÑECA F
424.17.65.406424.17.65Muñeca_F_406.idw
BRAZO ROBOTICO
6
31,65
4,9
24,9
12 2,45
R12,45
8
3
13,2
6
R6