DR 3-10.pdf
32
Polipasto de cable Demag DR 3 - 10 sin mando eléctrico 110507 ES / PDF 203 642 44 714 IS 813 42576444.eps 42352044.eps 42349444.eps
-
Upload
pato-puruncajas -
Category
Documents
-
view
342 -
download
44
Transcript of DR 3-10.pdf

Polipasto de cable Demag DR 3 - 10sin mando eléctrico
110507 ES / PDF 203 642 44 714 IS 813
42576444.eps
42352044.eps
42349444.eps

2 2036
4244
.indd
/110
507
Fabricante Demag Cranes & Components GmbHPostfach 67 · D-58286 WetterTeléfono (+ 2335) 92-0 · Telefax (+ 2335) 927676www.demagcranes.com
Rogamos rellene los datos de la tabla siguiente antes de efectuar la primera puesta en servicio. Esto le permitirá disponer de una información de su polipasto de cable Demag DR que le facilitará cualquier clase de consulta que desee hacer posteriormente.
Propietario
Lugar de utilización
Serie
Número de fabricación
Motor de elevación principal nº
Tensión de servicio
Tensión de mando
Frecuencia
Plano eléctrico nº
Otras documentaciones
Instrucciones de servicio
Polip. de cable Demag FDR 3 - FDR 5- FDR 10 (PRO) 214 934 44 720 IS 813
Polip. de cable Demag EKDR 3 - EKDR 5- EKDR 10 (PRO) 214 727 44 720 IS 813
Polip. de cable Demag EZDR 5- EZDR 10 (PRO) 214 963 44 720 IS 813
Polip. de cable Demag FDR 3 - FDR 5- FDR 10 (COM) 214 992 44 720 IS 813
Polip. de cable Demag EKDR 3 - EKDR 5- EKDR 10 (COM 214 918 44 720 IS 813
Polip. de cable Demag EZDR 5- EZDR 10 (COM) 214 967 44 720 IS 813
Dedrive Compact DIC 214 710 44 720 IS 922
CD Dedrive Compact DIC 213 139 44 716 IS 922
Generador de impulsos acoplado 214 374 44 720 IS 919
Motores de serie Z 214 230 44 720 IS 919

32036
4244
.indd
/110
507
La presente documentación contiene informaciones sobre los polipastos de cable sin mando eléctrico. Estas informaciones son válidas para los polipastos DR-Pro, EKDR-Pro, EZDR-Pro, FDR-Pro, EKDR-Com, EZDR-Com, FDR-Com.
Según el tipo de polipasto, el suministro estándar comprende lo siguiente:
- Motor de elevación de 12-/2 polos con microinterruptor térmico y generador de impulsos integrado EG
- Módulos de freno GS y VE - Motor de elevación de 4 polos con microinterruptor térmico y dispositivo de
montaje para generador de impulsos acoplado AG 1 - 3- Módulos de freno GE y VE- Motor de traslación de 4 plos para el carro con microinterruptor térmico- Motor de traslación del carro 8/2 para EKDR- Módulos de freno GE y VE - Placa base en el espacio para la parte eléctrica del polipasto de cable, para la
conexión del motor de elevación y los sensores necesarios- Final de carrera de engranajes SGG- Limitador de sobrecarga MGS; en ejecución para dos ranuras con ZMS
Al efectuar el diseño del equipo eléctrico para el DR sin parte eléctrica se debe observar lo siguiente:Los motores de polos conmutables están diseñados para servicio discontinuo. La base fundamental es la norma FEM 9.683, edición 10/1995.Derivados de dicha norma, en nuestras documentaciones indicamos para los citados motores los valores de factor de marcha y frecuencia de conexiones.Los valores indicados en dichas documentaciones no se deberán rebasar. Para asegurar que no se rebasen los valores, recomendamos incorporar elementos temporizadores que impidan la conexión frecuente o una rápida reconexión del bobinado de dos polos.El valor de ajuste debe ser de al menos de 1 segundo.
Introducción

4 2036
4244
.indd
/110
507
Principio de construcción
42577844.eps
Motón inferior 4/1
Motor de trasl.
Reductor con motor de elevación
Carro monorraíl de altura reducida EKDR
Significado de la denominación / Asignación de tipos
1) Código 01 Preparado para el equipo eléctrico por cuenta del cliente. Código 01 DR con equipo eléctrico interno para utilización en grúa. Caja en el puente de la grúa y botonera de mando DSE-8R o DSE-10R con cable de
mando incluido. Código 02 DR con equipo eléctrico separado para carro solo. Botonera de mando DSE-8R o DSE-10R con cable de mando incluido. Código 03 Como en el caso del código 01, pero con telemando por radio. Código 04 Como en el caso del código 01, pero con telemando por radio. Código 05 DR con interface en paralelo incorporada “in“.
Fig. 1
Ejemplo EKDR
E K DR-Pro 3 - 3,2 4/1 - 6 Z - 6/1 - 400 - 00 - 50 - 30 300 45Ancho de cabeza del carril en mm sólo EZDR
Ancho de víao ancho de ala de la viga en mmo perfi l de viga y tamaño (IPE240)
Máx. velocidad de trasl. del carro en m/min
Frecuencia [Hz]
Código equipo eléctrico 1)
Tensión de servicio [V]
Velocidad de elevación en m/min
Tipo de motor: Z = de rotor cilíndrico
Rec. de gancho en m
Disposición de cable
Capacidad de carga en t
Serie 3; 5; 10
Polipasto de cable Demag
K = carro de altura reducidaZ = carro birraílF = estacionario
E = traslación eléctrica
Balancín de presión
Tapa conregleta de bornes y finalde carrera de engranajes

52036
4244
.indd
/110
507
Ejemplo Cpdad. de carga 5 tTipo de carga „media” según tablaVelocidad de elev. principal 6 m/minVelocidad de elev. de precisión 1 m/minDisposición de cable 4/1Recorrido de gancho medio 3 mCiclos/hora 20Tiempo de trabajo/día 8 horasEl promedio diario de marcha se estima o se calcula como sigue:
El tamaño apropiado del polipasto es determinado por el tipo de carga, promedio de marcha, carga a elevar y disposición del cable.
Cpd
ad. c
arga
Tiempo de marcha
Tiempo de marcha
Cpd
ad. c
arga
Tiempo de marcha
Tiempo de marcha
Carga muerta muy grande
Carga parcial pequeñaCarga muerta pequeña
Carga parcial pequeñaCarga parcial mediaCarga muerta media
Carga muerta grande
Cpd
ad. c
arga
4 carga muy pesadaPolipastos sometidos regularmente a solicitaciones en las proximidades de la solicitación máxima.
3 carga pesadaPolipastos sometidos con frecuencia a la solici-tación máxima y corrientemente a solicitaciones medias.
2 carga mediaPolipastos sometidos con bastante frecuencia a la solicitación máxima y corrientemente a solicitaciones medias.
El tipo de carga(en la mayoría de los casos estimado) se puede determinar según el esquema siguiente:
1 carga ligeraPolipastos sometidos sólo excepcionalmente a la solicitación máxima y corrientemente a solicitaciones muy bajas.
Criterios de elección
1. ¿Cuáles son las condiciones de servicio?2. ¿A cuánto asciende la carga máxima?3. ¿A qué altura se debe elevar la carga?4. ¿A qué velocidad se debe elevar la carga?
5. ¿Es necesario manejar las cargas con alta precisión?
6. ¿Se debe desplazar la carga también en sentido horizontal?
7. ¿Qué tipo de mando se desea en el polipasto?
Tabla de elección
Para el tipo de carga media y un promedio diario de marcha de 2,66 horas, en la tabla se indica el grupo 2 m. Para una capacidad de carga de 5 t y con una dispo-sición de cable de 4/1, en la tabla se indica el tamaño DR 5 - 5.
El tiempo de marcha y el tipo de carga determinan el grupo.Tipo de carga Promedio diario de marcha en horas
1 ligera 4-8 8-16 más de 16
2 media 2-4 4-8 8-16
3 pesada 1-2 2-4 4-8
4 muy pesada 0,5-1 1-2 2-4
Grupo de mecanismo según FEM 2 m 3 m 4 m
ISO M 5 M 6 M 7
DR-Pro F-/EKDR 3 - F-/EK-/EZDR 5, 10
Serie Grupo de mecmo.FEM/ISO
Capacidad de carga
Rec. de gancho
Velocidad de elevación m/min Capacidad de carga
Rec. de gancho
Velocidad de elevación m/min
t m V1 V2 V3 3) t m V1 V2 V3 3)Disposición de cable 2/1 Disposición de cable 4/1
F-/EK-/EZ-DR 3
2 m/M 5 1,612; 20 12/2 18/3 1 - 25 4)
3,26; 10 6/1 9/1,5 0,5-12,5 4)3 m/M 6 1,25 2,5
4 m/M 7 1 2Disposición de cable 2/1 Disposición de cable 4/1
F-/EK-/EZ-DR 5
2 m/M 5 2,512; 20 12/2 18/3 1-25 4)
56; 10 6/1 9/1,5 0,5-12,5 4)3 m/M 6 2 4
4 m/M 7 1,6 3,2Disposición de cable 4/2
2 m/M 5 2,59,9 12/2 18/3 1-25 4)3 m/M 6 2
4 m/M 7 1,6Disposición de cable 2/1 Disposición de cable 4/1
F-/EK-/EZ-DR 10
2 m/M 5 512; 20; 40 10/1,7 1-18 3) 4) 1-25 4)
106; 10; 20 5/0,8 1-9 3) 4) 0,5-12,5 4)3 m/M 6 4 8
4 m/M 7 3,2 6,3Disposición de cable 4/2 Disposición de cable 6/1 5)
2 m/M 5 55,8; 11,35;
25,210/1,7 1-18 3) 4) 1-25 4)
166,7; 13,3 2,7/0,4 0,7-6 -3 m/M 6 4 12,5
4 m/M 7 3,2 10
1) Vida útil del reductor, 20 % sobre el valor según FEM.2) Disposición de cable 4/2 sólo con DR 5 y DR 10, 6/1 sólo con DR 10.3) Con Prohub las cargas hasta un tercio de su valor nominal se pueden transportar a una velocidad de 1,5 por el valor nominal.
4) con 400 V, 87 Hz con conexión en triángulo 5) Disposición de cable 6/1 sólo con EZDR 10.
T de mcha. / día =2 · rec. gancho medio · ciclos / h · tpo. trabajo / día
=60 · velocidad de elevación
T de mcha. / día =2 · 3 · 20 · 8
= 2,66 horas60 · 6
Cpd
ad. c
arga
Grupo de me-canismo según FEM/ISO 1)
2 m/M 5 3 m/M 6 4 m/M 7 2 m/M 5 3 m/M 6 4 m/M 7 2 m/M 5 3 m/M7 4 m/M 7
Disp. de cable 2/1, 4/2 2) 4/1 6/1 2)
Serie Capacidad de carga en t
DR 3 1,6 1,25 1 3,2 2,5 2 - - -
DR 5 2,5 2 1,6 5 4 3,2 - - -
DR 10 5 4 3,2 10 8 6,3 16 12,5 -

6 2036
4244
.indd
/110
507
Serie Grupo de mecmo.seg. FEM/ISO
Capacidad de carga
Rec. de gancho Vel. de elevación m/min
t m V1
4/1
F-/EKDR 3
1 Am/M 4
2
6; 10 4,5/0,82,5
3,2
F-/EK-/EZDR 54
6; 10 4,5/0,85
F-/EK-/EZDR 10
6,3
6; 10 4/0,78
10
Ejemplo Cpdad. de carga 5 tTipo de carga „media” según tablaVelocidad de elev. principal 4,5 m/minVelocidad de elev. de precisión 0,8 m/minDisposición de cable 4/1Recorrido de gancho medio 3 mCiclos/hora 10Tiempo de trabajo/día 8 horasEl promedio diario de marcha se estima o se calcula como sigue:
El tamaño apropiado del polipasto es determinado por el tipo de carga, promedio de marcha, carga a elevar y disposición del cable.
Cpd
ad. c
arga
Tiempo de marcha
Tiempo de marcha
Cpd
ad. c
arga
Tiempo de marcha
Tiempo de marcha
Carga muerta muy grande
Carga parcial pequeñaCarga muerta pequeña
Carga parcial pequeñaCarga parcial mediaCarga muerta media
Carga muerta grande
Cpd
ad. c
arga
4 carga muy pesadaPolipastos sometidos regularmente a solicitaciones en las proximidades de la solicitación máxima
3 carga pesadaPolipastos sometidos con frecuencia a la solici-tación máxima y corrientemente a solicitaciones medias.
2 carga mediaPolipastos sometidos con bastante frecuencia a la solicitación máxima y corrientemente a solicitaciones medias.
El tipo de carga(en la mayoría de los casos estimado) se puede determinar según el esquema siguiente:
1 carga ligeraPolipastos sometidos sólo excepcionalmente a la solicitación máxima y corrientemente a solicitaciones muy bajas.
1. ¿Cuáles son las condiciones de servicio?2. ¿A cuánto asciende la carga máxima?3. ¿A qué altura se debe elevar la carga?4. ¿A qué velocidad se debe elevar la carga?
5. ¿Es necesario manejar las cargas con alta precisión?
6. ¿Se debe desplazar la carga también en sentido horizontal?
7. ¿Qué tipo de mando se desea en el polipasto?
Para el tipo de carga media y un promedio diario de marcha de 1,7 horas, en la tabla se indica el grupo 1 Am. Para una capacidad de carga de 5 t y con una dis-posición de cable de 4/1, en la tabla se indica el tamaño DR 5 - 5.
DR-Pro F-/EKDR 3 - F-/EK-/EZDR 5, 10
T de mcha. / día =2 · rec. gancho medio · ciclos / h · tpo. trabajo / día
=60 · velocidad de elevación
T de mcha. / día =2 · 3 · 10 · 8
= 1,7 horas60 · 4,5
Cpd
ad. c
arga
Tabla de elección
Grupo de mecmo. según FEM/ISO 1 Am/M 4
Disp. de cable 4/1
Serie Capacidad de carga en t
DR 3 3,2
DR 5 5
DR 10 10
El tiempo de marcha y el tipo de carga determinan el grupo
Tipo de carga Promedio diario de marcha en horas
1 ligera 2-4
2 media 1-2
3 pesada 0,5-1
4 muy pesada hasta 0,5
Grupo de mecanismo segúnFEM 1 Am
ISO M 4

72036
4244
.indd
/110
507

8 2036
4244
.indd
/110
507
Datos de accionamientos de elevación de polos conmutables, DR 3 - DR 5 - DR 10El dimensionado corresponde a las normas VDE y a las reglas de cálculo FEM, establecidas de acuerdo con las exigencias que los aparatos de elevación han de satisfacer en el servicio.
1) Estos fusibles protegen al mismo tiempo el motor de traslación del carro.2) En el cálculo de las longitudes de los cables se ha considerado una impedancia de bucle de 200 mΩ.
Secciones y fusibles necesarios para los cables de alimentaciónElevación principal/precisión F6
Serie DR 3 Nº de polos
Refer. P % FM n Conex./h Corriente nominal IN y de arranque IA con 50 Hz
cos cos
400 V φN φA
Tam. de motor kW 1/min IN (A) IA (A)
ZBR 100 C 12/2 - B050
12V1
0,55 20 430 240 4,6 7 0,53 0,72
2 3,4 40 2800 120 8,5 40 0,78 0,88
ZBR 100 D 12/2 - B050
12V2
0,8 20 410 240 5,7 9 0,55 0,75
2 5,3 40 2780 120 11 55 0,88 0,85
Serie DR 3 Fusibles (de retardo) con 50 Hz 1) Cables de alimentación con una caída de tensión ∆U de 5 % y una corriente de arranque IA con 50 Hz 2)
400 V 400 V (∆U 20 V)
Tam. de motor A mm² m
ZBR 100 C 12/2 20 1,5 25
ZBR 100 D 12/2 25 1,5 19
Serie DR 5 Nº de polos
Refer. P % FM n Conex./h Corriente nominal IN y de arranque IA con 50 Hz
cos cos
400 V φN φA
Tam. de motor kW 1/min IN (A) IA (A)
ZBR 100 D 12/2 - B050
12V1
0,8 20 410 240 5,7 9 0,55 0,75
2 5,3 40 2780 120 11 55 0,88 0,85
ZBR 132D 12/2 - B140
12V2
1,4 20 400 240 9,6 15 0,54 0,68
2 8,9 40 2870 120 18 120 0,89 0,85
Serie DR 5 Fusibles (de retardo) con 50 Hz 1) Cables de alimentación con una caída de tensión ∆U de 5 % y unacorriente de arranque IA con 50 Hz 2)
400 V 400 V (∆U 20 V)
Tam. de motor A mm² m
ZBR 100 D 12/2 25 1,5 19
ZBR 132 D 12/2 50 2,5 15
Serie DR 10 Nº de polos
Refer. P % FM n Conex./h Corriente nominal IN y de arranque IA con 50 Hz
cos cos
400 V φN φA
Tam. de motor kW 1/min IN (A) IA (A)
ZBR 132D 12/2 - B140
12V1
1,4 20 400 240 9,6 15 0,54 0,68
2 8,9 40 2870 120 18 120 0,89 0,85
Serie DR 10 Fusibles (de retardo) con 50 Hz 1) Cables de alimentación con una caída de tensión ∆U de 5 % y unacorriente de arranque IA con 50 Hz 2)
400 V 400 V (∆U 20 V)
Tam. de motor A mm² m
ZBR 132 D 12/2 50 2,5 15

92036
4244
.indd
/110
507
Datos de accion. de traslación del carro con convertidor DR 3, DR 5, DR 10 - 2/1 - 4/1 - 4/2
Serie DR 3-10 Nº de polos % FM PotenciaP
Corriente con 220 V
cos φ ncon 50 Hz
Tipo de convertidor recomendado
Tam. de motor kW I (A) 1/min Dedrive Compact
ZBA 71 B4 - B003 4 60 0,37 2,6 0,54 1375 DIC-4-004-E
Datos de accion. de traslación del carro con convertidor, EZDR 10 -Pro 6/1Serie DR 3-10 Nº de polos % FM Potencia
PCorriente con 220 V
cos φ ncon 50 Hz
Tipo de convertidor recomendado
Tam. de motor kW I (A) 1/min Dedrive Compact
ZBA 90 A4 - B007 4 60 1,1 5,1 0,74 1400 DIC-4-007-E
ZBR 100 C 2/12, 400 V, longitud requerida 25 mEjemplo para calcular la sección de los conductores cuando su longitud es mayor que la indicada en la tabla:
Datos de accionamientos de traslación del carro, DR 3 - DR 5 - DR 10
Los accionamientos de traslación para el carro del „DR sin mando eléctrico“ están diseñados para servicio con un convertidor de frecuencia Demag para operar con 120 Hz. Recomendamos la utilización del convertidor de frecuencia Demag Dedrive Compact DIC. El amplio margen de tensión de entrada del Dedrive Compact permite utilizar el „DR sin mando eléctrico“ con tensiones de red de 380...480 V y frecuencias de 50...60 Hz. Con la tensión de 380 voltios la frecuencia máxima se tiene que reducir en 5 Hz.
sección conocida · longitud requerida=
2,5 · 25= 4 mm²
longitud de cable conocida 16
Datos de accion. de traslación del carro de polos conmutables, EKDR 3 y 5Velocidad de traslación del carro 6 / 24 m/min con 50 Hz
Datos del accion. de traslación del carro de polos conmutables, EKDR 10Velocidad de traslación del carro 6 / 24 m/min con 50 Hz
Serie DR 3 y 5
Nº de polos
P % FM n MN Corriente nom. IN con 50 Hz
cos IA / IN MA / MN MH JMot A Peso
380 - 400 V
Tam. de motor kW 1/min Nm IN (A) φN Nm Nm kgm² · 10-3 h-1 kg
ZBF 71 A 8/2 - B0038 0,09
40675 1,25 0,76 0,61 1,60 2,7
2,5 6,90620
12,22 0,34 2785 1,15 1,00 0,73 3,50 2,6 500
Serie DR 10 Nº de polos
P % FM n MN Corriente nom. IN con 50 Hz
cos IA / IN MA / MN MH JMot A Peso
380 - 400 V
Tam. de motor kW 1/min Nm IN (A) φN Nm Nm kgm² · 10-3 h-1 kg
ZBF 80 A 8/2 - B0208 0,13
40630 1,95
1,450,64 1,20 2,1 3,5
12,75620
19,52 0,50 2790 1,70 0,73 4,50 2,6 4,0 500

10 2036
4244
.indd
/110
507
Serie DR 3 Nº de polos Referencia Clasif. FEM % FM PotenciaP
Corrientecon 220 V
cos φ ncon 50 Hz
Tipo de convertidor recomendado
Tam. de motor kW I (A) 1/min Dedrive Compact
ZBR 100 B 4 - B050
4 V3
2m
60 4,2 16,9 0,85 1350
DIC-4-017
ZBR 100 B 4 - B050 3m DIC-4-014
ZBR 100 B 4 - B050 4m DIC-4-014
Serie DR 3 Fusibles (de retardo) con 50 Hz 1) Cables de alimentación con una caída de tensión ∆U de 5 % 2)400 V 400 V (∆U 20 V)
Tipo de convertidor A mm² m
DIC-4-017 16 1,5 58
DIC-4-014 16 1,5 70
Serie DR 10 Fusibles (de retardo) con 50 Hz 1) Cables de alimentación con una caída de tensión ∆U de 5 % 2)
400 V 400 V (∆U 20 V)
Tipo de convertidor A mm² m
DIC-4-040 50 6,0 97
DIC-4-032 35 4,0 80
DIC-4-025 35 2,5 65
Serie DR 5 Nº de polos Referencia Clasif. FEM % FM PotenciaP
Corrientecon 220 V
cos φ ncon 50 Hz
Tipo de convertidor recomendado
Tam. de motor kW I (A) 1/min Dedrive Compact
ZBR 132 B 4 - B140
4 V3
2m
60
8,3 29,0 0,87 1420 DIC-4-025
ZBR 112 A 4 - B140 3m5,3 18,7 0,84 1430
DIC-4-025
ZBR 112 A 4 - B140 4m DIC-4-017
Serie DR 10 Nº de polos Referencia Clasif. FEM % FM PotenciaP
Corrientecon 220 V
cos φ ncon 50 Hz
Tipo de convertidor recomendado
Tam. de motor kW I (A) 1/min Dedrive Compact
ZBR 132 C 4 - B140
4
V2
2m
60
10,9 40 0,83 1420 DIC-4-040
ZBR 132 B 4 - B140 3m8,3 29 0,87 1420
DIC-4-032
ZBR 132 B 4 - B140 4m DIC-4-025
ZBR 132 C 4 - B140
V3
2m 50 13,3 49 0,84 1410 DIC-4-040
ZBR 132 C 4 - B140 3m60 10,9 40 0,83 1420
DIC-4-040
ZBR 132 C 4 - B140 4m DIC-4-032
Serie DR 5 Fusibles (de retardo) con 50 Hz 1) Cables de alimentación con una caída de tensión ∆U de 5 % 2)
400 V 400 V (∆U 20 V)
Tipo de convertidor A mm² m
DIC-4-025 35 2,5 65
DIC-4-017 16 1,5 58
1) Estos fusibles protegen al mismo tiempo el motor de traslación del carro.2) En el cálculo de las longitudes de los cables se ha considerado una impedancia de bucle de 200 mΩ.
Datos de accionam. de elevación con convertidor de frecuencia, DR 3, DR 5, DR 10El dimensionado corresponde a las normas VDE y a las reglas de cálculo FEM, establecidas de acuerdo con las exigencias que los aparatos de elevación han de satisfacer en el servicio.
Los accionamientos de elevación para el „DR sin mando eléctrico“ están diseñados para servicio con un convertidor de frecuencia Demag y para operar con 87 Hz. Recomendamos la utilización del convertidor de frecuencia Demag Dedrive Compact DIC. El amplio margen de tensión de entrada del Dedrive Compact permite utilizar el „DR sin mando eléctrico“ con tensiones de red de 380...480 V y frecuencias de 50...60 Hz. Con la tensión de 380 voltios la frecuencia máxima se tiene que reducir en 5 Hz.
Los datos del motor indicados se refieren a 220 V, 50 Hz con conexión en triángulo. Los motores de elevación están diseñados para una tensión de servicio máx. de 500 V. Tensiones mayores a solicitud.

112036
4244
.indd
/110
507
Los ajustes de los parámetros necesarios se pueden tomar de la tabla siguiente. Para los accionamientos de elevación se necesita en el motor una señal retroalimentada de un generador de impulsos. Recomendamos el generador de impulsos acoplado Demag AG 2 unido al módulo de extensión EM-ENC-02 para el convertidor de frecuencia Demag Dedrive Compact.Una vez que se hayan introducido los valores asignados al motor, es imprescindible realizar una identificación de los parámetros.Los datos que se indican para los motores son recomendaciones para conseguir una óptima identificación del mo-tor respectivo y con ello un óptimo modo de operación de los motores. Los valores recomendados pueden diferir de los grabados en la placa de tipo de los motores. (Datos grabados en los motores, véase nota de pie 4)
Ajuste de parámetros para el recomendado convertidor de frecuencia Dedrive Compact DIC
Para más detalles sobre la puesta en marcha, las múltiples posibilidades del modo de activación, las diversas y especiales funciones del mecanismo de elevación y la elección de componentes complementarios para el Dedrive Compact DIC, véase las instrucciones de servicio 214 710 44 y 214 718 44. Se tienen que observar las condiciones ambientales admisibles.
1) Con la tensión de 380 voltios la frecuencia máxima se tiene que reducir en 5 Hz2) Referido a la velocidad de elevación nominal. Entre paréntesis: fmáx si se utiliza la función Prohub-para aumentar la capacidad en el margen de carga par-
cial. Otras informaciones más detalladas véase documentación para proyectos Dedrive Compact 214 718 44.3) Parametrización si se utiliza la función Prohub. 4) Datos grabados en el motor: ZBA 71 B 4 60% U = 220V I = 2,6A n = 1375min-1 pares de polos = 2 cos phi = 0,54 f = 50Hz P = 0,37kW ZBA 90 A 4 60% U = 220V I = 5,1A n = 1400min-1 pares de polos = 2 cos phi = 0,74 f = 50Hz P = 1,1kW ZBR 100 B 4 60% U = 220V I = 16,9 A n = 1350min-1 pares de polos = 2 cos phi = 0,85 f = 50Hz P = 4,2kW ZBR 112 A 4 60% U = 220V I = 18,7 A n = 1430min-1 pares de polos = 2 cos phi = 0,84 f = 50Hz P = 5,3kW ZBR 132 B 4 60% U = 220V I = 29,0A n = 1420min-1 pares de polos = 2 cos phi = 0,87 f = 50Hz P = 8,3kW ZBR 132 C 4 50% U = 220V I = 49,0A n = 1410min-1 pares de polos = 2 cos phi = 0,84 f = 50Hz P = 13,3kW ZBR 132 C 4 60% U = 220V I = 40,0A n = 1420min-1 pares de polos = 2 cos phi = 0,83 f = 50Hz P = 10,9kW
Nr. Name Einheit ZBA 4) ZBR 4)71 B4 90 A4 100 B4 112 A4 132 B4 132 C4
030 Confi guración - 410 210
370 Tensión de dimensionado V 220 220
371 Corriente de dimensionado A 2,6 5,1 12,4 14,9 26,5 34,0
372 Velocidad de dimensionado 1/min 1375 1400 1400 1440 1435 1440
373 Parejas de polos - 2 2
374 Cosinus Phi de dimensionado - 0,54 0,74 0,79 0,83 0,85 0,84
375 Frecuencia de dimensionado Hz 50 50
376 Potencia mecánica de dimen-sionado kW 0,4 1,1 3,0 4,0 7,5 9,5
417 Lím. desconx. de frecuencia Hz 250 100 (140)
418 Frecuencia mínima Hz 5 8
419 Frecuencia máxima1) Hz 120 84 (133) 2) 85 (133) 2) 86 (133) 2)
420 Aceleración Hz/s 25 42 42,5 43
421 Deceleración Hz/s 50 42 42,5 43
490 Modo de servicio generador 1 - 0 4
491 Imp. por vuelta generador 1 - - según el tipo de generador utilizado
721 Amplifi cac. regulador de vel. - 3 10
722 Tpo. de reajuste regulador de vel. ms 200 100
850 Modo de servicio (Prohub) - 1-On 3)
851 Liberación debilit. de campo - 6-On 3)
852 Inicio debilit. de campo % - 166 3)
853 Valor de corrección elevación % - 15 3)
854 Valor de corrección descenso % - 10 3)
855 Inicio de medición Hz - 80,0 3)
856 Factor debilit. de campo - 0,50 3)

12 2036
4244
.indd
/110
507
1
23
4
12
34
56
EG
J K
PE
PE
PE
PE
PE
5
12V
EA
1AB
1BG
DN
E
LX
52
Kre
uz1
Kre
uz2 P
E3
21
PE
32
18
76
54
32
1P
E2
1
SG
SS
GG
67
811
129
10
ThH
ThH
Brg
Brg
BrH
BrH
SG
SS
GS
PE
SG
G1
SG
G8
SG
G7
SG
G6
SG
G5
SG
G4
SG
G3
SG
G2
X16
1P
EX
483
X48
2X
418
PE
X16
3X
162
X48
X16
X5
X53
PE
X9
X11
12 p
ol. H
UB
2 po
l. H
UB
UV
WU
VW
PE
A
BC
DE
FG
HI
Placa de conexiones con regleta de bornes para DR con motor de elevación de 2-/12 polos
42354944.epsFig. 2
Per
fil o
meg
a de
280
mm
de
larg
o
Ele
vaci
ón 2
pol
os
Ele
vaci
ón12
pol
os
Int.
conm
.1In
t. co
nm.2

132036
4244
.indd
/110
507
1 Perfil omega2 Conexión motor de elevación, 12 polos3 Conexión motor de elevación, 2 polos4 Generador de impulsos integrado EG5 Conductor de prot. PE6 Interruptor térmico motor de elevación7 Contacto aflojamiento del freno motor de elevación8 Freno motor de elevación9 Seguro contra sobrecarga electromecánico SGS10 Final de carrera de engranajes SGG11 Desconexión general traslación del carro12 Desconexión previa traslación del carro (v2 → v1)
A Bornes de conexión X11 (motor de elevación, 12 polos)B Bornes de conexión X9 (motor de elevación, 2 polos)C Bornes de conexión X10 (señales de motor de elevación)D Bornes de onexión X53 (SGS)E Conductor de prot. PEF Bornes de conexión X5 (SGG)G Bornes de conexiones X16 (descox. final)H Bornes de conexión X48 (desconx. previa)I Conductor de prot. PEJ Conductor de prot. PEK Conductor de prot. PEL Conexión X52 (generador de impulsos integrado motor de elevación)
Conexiones por parte del cliente
Conexiones de fábrica
En todos los bornes se podrán conexionar conductores con una sección de hasta 4 mm² Cu, excepto en la elevación de 2 polos y el PE, estas conexio-nes podrán tener una sección de 16 mm² Cu.

14 2036
4244
.indd
/110
507
L
1
23
4
12
34
56
EG
J K
PE
PE
PE
PE
PE
5
12V
EA
1AB
1BG
DN
E
X52
Kre
uz1
Kre
uz2 P
E3
21
PE
32
18
76
54
32
1P
E2
1
SG
SS
GG
67
811
129
10
ThH
ThH
Brg
Brg
BrH
BrH
SG
SS
GS
PE
SG
G1
SG
G8
SG
G7
SG
G6
SG
G5
SG
G4
SG
G3
SG
G2
X16
1P
EX
483
X48
2X
418
PE
X16
3X
162
X48
X16
X5
X53
PE
X9
X11
12 p
ol. H
UB
2 po
l. H
UB
UV
WU
VW
PE
A
BC
DE
FG
HI
Placa de conexiones con regleta de bornes para DR con motor de elevación de 4 polos y servicio con convertidor de elevación
42356144.epsFig. 3
Per
fil o
meg
a de
280
mm
de
larg
o
Ele
vaci
ón 2
pol
os
Ele
vaci
ón12
pol
os
Int.
conm
.1In
t. co
nm.2

152036
4244
.indd
/110
507
En el DR con motor de elevación de 4 polos la conexión se efectúa directamente en la caja de bornes del motor
1 Perfil omega2 -3 -4 -5 Conductor de protección PE6 -7 -8 -9 Seguro contra sobrecarga electromecánico SGS10 Final de carrera de engranajes SGG11 Desconexión general traslación del carro12 Desconexión previa traslación del carro (v2 → v1)
A Bornes de conexión X11 (motor de elevación, 12 polos) 1)B Bornes de conexión X9 (motor de elevación, 2 polos) 1)C Bornes de conexión X10 (señales de motor de elevación) 1)D Bornes de onexión X53 (SGS)E Conductor de prot. PEF Bornes de conexión X5 (SGG)G Bornes de conexión X16 (descox. final)H Bornes de conexión X48 (desconx. previa)I Conductor de prot. PEJ Conductor de prot. PEK Conductor de prot. PEL Conexión X52 (generador de impulsos integrado, motor de elevación) 1)
Conexiones por parte del cliente
Conexiones de fábrica
En todos los bornes se deben conexionar conductores con una sección de hasta 4 mm² Cu, excepto en la elevación de 2 polos y el PE, estas conexiones podrán tener una sección de hasta 16 mm² Cu.
1) Estas piezas no se utilizan en la variante del motor de 4 polos.

16 2036
4244
.indd
/110
507
4
2
3
1
2
3
1
1
3
2
Entrada de cable
42355044.eps
1 Entrada cable redondo M25 1)2 Entrada cable redondo M20 1)3 Prensaestopas para pasacables hasta un máx. de 12,5 mm4 Entrada cable redondo M25
42355344.eps
42355144.eps
42355244.eps
Entrada de cable caperuza DR 3, DR 5, DR 10
Entrada de cable DR 3 Entrada de cable DR 5
Entrada de cable DR 10
1) Los prensaestopas tienen que estar provistos de una rosca larga (aprox. 15 mm). p. ej. prensaestopas Schlemmer-Tec, Nº de fabricante 5307620 (M20 x 1,5) prensaestopas Schlemmer-Tec, Nº de fabricante 5307125 (M25 x 1,5)
Fig. 4

172036
4244
.indd
/110
507
PE
V1W1
BD2 BD1
1234567
+-
~~
GS
M3~
2L1 2L31L11L2 1L3
VERD WHBU
~~
2L2
TB
1
TB
21S
2
1S1
~
X1
RD
U V W
U1
V2W2
U2
PE
BD2 BD1
1234567
+-
~~~
GS
2L1 2L2 2L31L1 1L2 1L3
1V1W
2V2W
M3~
VE
RD WHBU
UU U U
2U
1U
X1
RD
TB
1
TB
21S
2
1S
1
L+ L-
Esquemas de conexiones básicos
Accionamiento de elevación con convertidor de frecuencia
Accionamiento de elevación de polos conmutables
Esquemas de conexiones motor de elevación
42356044.eps
42355944.eps
Con
trol d
e fre
no
Int.
térm
ico
Platina en DR
Vel. baja Vel. alta
Giro a la izda.
Giro a la derecha
¡Bloqueo de reco-nexión mín. 250 ms!
Armario eléctrico
Con
trol d
e fre
no
Int.
térm
ico
Motor
Cuadro de bornes del motor
Convertidor de frecuencia, elevación
Armario eléctrico
Fig. 5
Motor
¡Bloqueo de reco-nexión mín. 250 ms!

18 2036
4244
.indd
/110
507
PE
1L1 1L2 1L3
1U1V
1W
2U2V
2W
M3~
X1
BD2 BD1
1234567
+-
~~
GE
2L1 2L2
VERD BU
2L3
WH
U
TB
1
TB
2
RD
X1
PE
U1 V1 W1BD2 BD1
1234567
+-
~~
GE
M3~
2L1 2L21L1 1L2 1L3
VERD BU
~~
2L3
WH
U
TB
1
TB
2
RD
T2T1 T3
L- L+
Int.
térm
ico
Fren
o
Regleta de bornes del motor
Motor
Armario eléctrico
Accionam. traslación del carro con convertidor de frecuencia
Esquema de conexiones motor de traslación del carro
42355844.epsFig. 6
Generador de impulsos integrado EG
Contacto aflojam. de freno
Sondas térmicas motor de elev. y trasl. del carro
Véase instrucciones de servicio generador de impulsos, motores, serie Z“, nº de ref. 214 374 44
Véase “Instrucciones de motores de la serie Z”, nº de ref. 214 230 44
Véase “Instrucciones de motores de la serie Z”, nº de ref. 214 230 44
Accionam. traslación del carro con motor de polos conmutables
42713144.epsFig. 7
Int.
térm
ico
Fren
o
Motor
Armario eléctrico
Regleta de bornes del motor

192036
4244
.indd
/110
507
Módulo control de freno
Para el control de los frenos de disco Demag B003 a B680 con electroimanes de corriente continua, se tienen diversos módulos disponibles.Todos los módulos se pueden instalar también en el armario eléctrico.La bobina del freno se debe proteger entonces con un varistor (nº de ref. 260 898 84) contra las puntas de tensión que se producen en la desconexión.Todos los rectificadores se equipan de serie con una protección contra sobreten-sión por varistores en la entrada de la tensión alterna y en la conexión para el contacto de conmutación.Todos los rectificadores de freno están diseñados para admitir una tensión alterna máx. de 500 V. Con los rectificadores GE (traslación del carro) y GS (elevación) es posible, en función del circuito previsto, una desconexión del freno por el circuito de corriente alterna o por el de corriente continua.Los tiempos de aplicación del freno dependen en gran medida de su modo de desconexión.Para el DR sin mando eléctrico se requiere una desconexión por el lado de corriente continua, utilizando un módulo VE.
Servicio con convertidor de frecuenciaSi los motores freno de rotor cilíndrico ZB se utilizan con convertidores, la alimentación y el control del freno se tienen que realizar por separado.
Módulos para el control del freno
• Rectificador de freno GE (excitación normal) El rectificador de freno GE es estándar y está previsto para el accionamiento
de traslación del carro del DR. Este módulo GE consta básicamente de una rectificación de media onda con un circuito de marcha libre integrado.
• Rectificador de freno GS (excitación rápida) El rectificador de freno GS es estándar y está previsto para los motores ZBR
de los accionamientos de elevación del DR. El módulo GS contiene un rectificador conmutable que es sobreexcitado
durante 0,3s para aflojar el freno y seguidamente alimentado con la tensión de mantenimiento por la rectificación de media onda (factor de sobreexcitación de 2,5 veces con una conexión trifásica).
¡Atención! ¡Si se utiliza con un motor de polos conmutables, la alimentación de tensión para el módulo GS tiene que efectuarse siempre por separado!
En la desconexión con módulos GS y VE, es decir la conmutación con sobreex-citación, para garantizar la función correcta se requiere un mínimo de 250 ms entre la desconexión y la reconexión.
• Relé de tensión VE (conmutación rápida en función de la tensión) El relé de corriente VE se puede combinar con los rectificadores de freno GE,
GS y GP. El relé de tensión VE se tiene que utilizar sólo con la alimentación del freno por separado.
Este módulo se utiliza preferentemente en motores con convertidor de frecuen-cia. Se utiliza para lograr una rápida desmagnetización del freno y mínimos tiempos de aplicación del mismo, sin requerir cables ni aparatos adicionales para su desconexión a través del circuito de corriente continua. El relé de ten-sión VE mide la tensión de alimentación del freno. Al desconectar el motor, este relé abre el contacto del circuito de corriente continua.

20 2036
4244
.indd
/110
507
Final de carrera de engranajes SGG
42589444.eps
Conexión de SGG/regleta de bornes
SGG Contactos de conmutación
1
1 1
2 2
2
3 3
4 4
4
7 7
8 8
3
5 5
6 6
Fig. 7
Husillo de ajuste „Ajuste individual“
Husillo de ajuste „Ajuste en bloque“
Para el ajuste del final de carrera de engranajes se necesita una llave allen de 4 mm.
Ajuste de los contactos de modo individual:
Antes de ajustar el punto de desconexión, se tiene que asegurar que las conexio-nes de contactos bajo tensión estén debidamente protegidas y no se pueda produ-cir ningún contacto fortuito con dichas conexiones.
¡Obsérve el recorrido de inercia!
Cada contacto está asignado a un disco de levas que se puede ajustar sin esca-lonamiento. Los discos de levas se pueden ajustar de forma independiente por medio del husillo de „Ajuste individual“.
Si el husillo de „Ajuste individual“ se gira a la derecha, el giro del disco de levas se efectúa en el mismo sentido. El punto de conmutación se desplaza hacia arriba en función del recorrido del gancho.Si se gira a la izquierda, el punto de conmutación se desplaza hacia abajo.Los discos de levas estándar están realizados de tal forma que se dispone de un recorrido útil máximo y de un recorrido de inercia.
El final de carrera está unido de forma fija con el mando por medio del cable del conector para el sistema. Para ajustar el contacto, el respectivo husillo de ajuste blanco se tiene que girar lo necesario hasta que el actuador abra el contacto.La apertura o cierre de nuevo del contacto se produce al rebasar el recorrido de inercia
Este ajuste se efectúa girando el husillo de „Ajuste en bloque“. En este caso, los discos de levas se ajustan de forma conjunta, sin alterarse el ajuste relativo de los contactos individuales. Si el husillo de „Ajuste en bloque“ se gira a la derecha, el giro del disco de levas se realiza en el mismo sentido.
¡Desplazar el polipasto a los puntos de desconexión y controlar los mismos!
Ajuste de los contactos en bloque:
Principio de funcionamiento
Ajuste
Instrucciones de ajuste para el SGG

212036
4244
.indd
/110
507
Rel. de transmisión:
Contactos de conmutación:
Tipo de contactos:
Disco de leva:
Precisión repetitiva del punto de conmutación:
Conexión eléctrica:
Características técnicas:Normas que se cumplen
Temperatura ambienteGrado de protecciónClase de aislamientoHomologaciones
Características técnicas de loselementos de contacto:Separación forzosa según la tensión de servicio nominal Ui
Corriente constante térmica Ith
Categoría de uso según VDE 0660:
Vida útil mecánica en ciclos
Señalización de bornesHomologacionesCarga de corriente para la conexión enchufable
Dimensiones exteriores:Longitud hasta la tapa de engranajesDimensiones de la carcasaAltura total
i = 205 con ajuste en bloque de todos los discos de levas, diseñado para un mínimo de >1x106 ciclos
4
Contacto inversor, cont. de ruptura rápida, cont. de apertura de separación forzosa, material de contactos: plata/plata
Leva de acciona. con 15°
Aprox. +/-15 mm en el gancho, en el caso más desfavorable con disposición de 2/1 y recorrido de gancho de 12 m. De las 47 vueltas del árbol motriz y con i = 205 resulta aquí un ángulo de ajuste de 79,71° en el árbol de levas.
Regleta de bornes de enchufe directo en la platina de circuitos.
EN 60204-1 IEC 947-5-1 EN 60947-T5-1EN 60529 EN50013 IEC 536Servicio continuo -40 °C hasta +80 °CIP 54Clase IICE y CSA
VDE 0660 parte 200 del 7/92250 VAC y 24/80 VDC6 AAC-15, 230 VAC/1,5 A
DC-13, 60 VDC/0,5 A10 x 106 ciclossegún EN 50013CE-UL/CSA6 A / 85 °C 250 VAC
aprox. 165 mmaprox. 91 x 72 mmaprox. 95 mm
Datos técnicos

22 2036
4244
.indd
/110
507
Limitador de carga
Limitador de sobrecarga electromecánico SGS
42355444.eps
Pulsador de posicionado
Regleta elástica, 2 polos
Terminal de casquillo y conector plano 6,3-2.1
Fig. 8
El limitador de sobrecarga SGS se ajusta según la ejecución a la carga nominal del DR y va instalado ya en el polipasto DR. A fin de evitar la oscilación del sistema debido a la desconexión y la reconexión, el contacto SGS se tiene que evaluar de modo adicional.
En la aplicación estándar recomendamos utilizar el evaluador de contactos MKA 2. Esta aparato evita, por el filtrado de la señal, una liberación anticipada del movimiento de elevación y de las oscilaciones relacionadas con el mismo. Este aparato se tiene disponible para tres márgenes de tensión de mando y se sumi-nistra sobre pedido.
En unión del SGS se puede utilizar sólo la función de “Limitación de sobrecarga”.
SGS Limitador de carga
Tensión de entrada: 24 V, 9600 HzSeñal de salida: Carga límite contacto de apertura -X53Poder de ruptura: 4A/230 VAC; 1A/24VDCTemperatura ambiente: -30° C hasta +80° CGrado de protección: IP 67Posición de montaje: discrecional

232036
4244
.indd
/110
507
41873344.eps
1 2 3 4 A2
A1 13 14 23 24
Dematik fiO.K CLK
46953144
gn br/ws ge
MKA-2
MGS
Placa frontal MKA-2
45,0 113,0
7140995644.eps
Posiciones de los puentes
1) ¡Puentes para recepción de grúa.¡Retirar los puentes después de la recepción!
1)
Dimensiones MKA-2
Placa frontal/esquema de conexiones/dimensiones MKA-2
Pos. 2limitación de sobrecarga
Seguro contra sobrecargapos. 1 (no con SGS)
Fig. 9
Evaluador de contactos Dematik® MKA-2Nº de ref.: para tensión de mando 220...240 V, 50/60 Hz 469 531 44 110...120 V, 50/60 Hz 469 532 44 42...48 V, 50/60 Hz 469 533 44 24 V, 50/60 Hz 469 534 44
Tensiones diferentes en ejecuciones epeciales:Contactos posibles: 2 contactos de cierrePresión de ruptura nominal: 230 V; 5 A AC11, 4 A corriente nominal de cortocircuito condicionadaMargen tensión de servicio: 90 hasta 100 % del valor nominal Consumo nominal: máx. 4 VAMargen de temperatura ambiente: -20° C hasta +70° CModo de servicio: apropiado para servicio continuoGrado de protección: IP 40 según DIN 40 050Conexión de conductores: máx. 2 x 2,5 mm², con terminales de autorretenciónPosición de montaje: discrecionalFijación: Fijación rápida para perfil soporte de 35 mmPeso: 390 g

24 2036
4244
.indd
/110
507
L1,L2,L3 PE
F2
K3 K4
M2
M3
L4
S1 S2
S2 S1
24
23U1
S3 S3
K4 K3
K3 K4
L5
A1
U1
A2 2 3
Dematik MKA-2
SGS
SGS1 SGS2
21 22
Esquema básico
Dematik® SGS/MKA-2 como limitador de sobrecarga
DenominacionesB1 = Limitador SGSF2 = Fusible „motor elevación principal“K3 = Contactor „elevación principal“K4 = Contactor „descenso principal“M2 = Motor de elevación principalS1/S2 = Pulsadores elevación/descensoS3 = Final de emergencia elevación/descensoU1 = Evaluador de contactos Dematik® MKA-2
Fig. 10
Mar
rón
Am
arill
o
Elevación Descenso
Puente en la posición 2= limitación de sobrecarga(véase pág. 23, fig. 9)
42356644.eps
El limitador SGS se introduce en la posición SGS de la placa de circuitos (SGS 1, SGS 2, PE). Las conexiones de bornes salientes se unen al evaluador de contactos MKA-2. Borne DR de SGS 1 en borne 2 de MKA 2 y borne DR de SGS 2 en borne 3 de MKA. El puente detrás de la placa frontal del MKA-2 se debe establecer en la posición 2, es decir entre el pin central y el que está más bajo.(Véase también la descripción de Limitadores de carga MGS/MKA-2 (206 691 44). En la combinación SGS & MKA el sistema opera sólo como “Limitador de sobre-carga”. Utilizar sólo los contactos 23-24 del MKA.
Función: SGS / MKA-2 como limitador de sobrecarga

252036
4244
.indd
/110
507
Seguro contra sobrecarga ZMS, FGB-2, FWL
42355544.eps
Apantallado sobre la cubierta exterior
Cálculo y ajuste punto de desconexión por sobrecarga
Descripción detallada: véase documentación 206 882 44
Ejemplo de cálculo para limitación de sobrecarga FWL
Ejemplo:DR 10-Pro, 8 t en 4/1ZMS = 1,25tA/B = 0,5
Polipasto de cable A/BDR 3 y 10 0,5DR 5 0,64
Pol. de cable
FEM Carga nominal [t] ZMS 2/1 4/1 6/1 4/2 LF [x10-3]
2/1 4/1 6/1 Pa-lancaA/B
4/2 Pa-lancaA/B
Carga nom. [t]
Valor S1 hasta S7
Valor S1 hasta S7
Valor S1 hasta S7
Valor S1 hasta S7
2/1 4/1 6/1 4/2
DR 3
2m 1,6 3,2
- 0,5 - 0,625
75 1101001 75 1101001
- - - -
1,0596
- -3m 1,25 2,5 60 0011110 60 0011110 2,2222
4m 1 2 49 1000110 49 1000110 4,3403
DR 5
2m 2,5 5
- 0,64
2,5
0,5 1,25
75 1101001 75 1101001
- -
115 1110011 1,0596
-
2,2222
3m 2 4 2 61 1011110 61 1011110 93 1011101 2,0696 4,3403
4m 1,6 3,2 1,6 50 0100110 50 0100110 75 1001011 4,0422 8,4771
DR 10
2m 5 10 16
0,5
5
0,5 1,25
115 1100111 115 1100111 122 0101111 115 1100111 0,2778 0,2289 0,2778
3m 4 8 12,5 4 93 1011101 93 1011101 115 1100111 93 1011101 0,5425 0,4800 0,5425
4m 3,2 6,3 10 3,2 75 1101001 74 0101001 78 0111001 75 1101001 1,0596 1,1109 0,9375 1,0596
ZMSFGB-2 con elemento de inserción de PVC
Fig. 11
Valor conm. FWL =carga nom. · A/B · 110
+ 5 =8t · 0,5 · 110
+ 5 = 93ramales cable · carga nom. ZMS 4 · 1,25t

26 2036
4244
.indd
/110
507
Módulo totalizador de solicitaciones FWL
La vida de los mecanismos de elevación o polipastos depende decisivamente de la elección correcta del grupo de mecanismo, o sea de la estimación correcta del tiempo de marcha y del espectro de cargas. No obstante, durante la larga vida útil es posible una modificación posterior de las condiciones de utilización, lo cual puede tener como consecuencia una vida útil más corta o más larga. Así, por ejemplo, en una grúa de producción el cambio de trabajo de uno a dos turnos significa una doble utilización diaria y conlleva, por tanto, un desgaste más rápido de los diferentes mecanismos.Dado que los mecanismos de elevación se diseñan según las reglas de resisten-cia funcional para un periodo fijo, se tiene que contar con fallos cuando se llegue a la vida útil teórica calculada.El FWL capta de forma segura, durante largo tiempo y a prueba de fallos de tensión todas las solicitaciones del polipasto durante el servicio. El totalizador de solicitaciones indica la vida útil consumida.Por ello, es posible en todo momento obtener las informaciones sobre las condi-ciones de utilización y la vida útil teórica restante.
El totalizador de solicitaciones mide la carga levantada y el tiempo que permanece conectado el motor de elevación.La carga medida se compara con la capacidad de carga nominal y se calcula una carga relativa. Dado que el desgaste de las piezas móviles del polipasto aumenta de forma no proporcional a medida que se incrementa la carga, la evaluación de la carga relativa se efectúa del modo apropiado. Mediante esta evaluación y operan-do con la mitad de la carga nominal, el polipasto genera sólo (1/2)3 = 1/8 del valor del espectro de cargas (valor LK) del que alcanza operando con la carga nominal. Con ¼ de la carga nominal el valor LK es de forma análoga (1/4)3 = 1/64, etc.El tiempo de operación del polipasto equivale a la suma de los tiempos para el movimiento de elevación y descenso. Dado que el desgaste es proporcional al tiempo de operación, el valor medido entra en el valor LK de modo proporcional al tiempo. Por consiguiente, al tiempo de operación doble con la misma carga le corresponde un valor LK doble.El totalizador de solicitaciones acumula las solicitaciones medidas del polipasto de forma continua para todas las cargas e intervalos de conexión. Por ello, el valor LK visualizado corresponde así a la suma de las solicitaciones habidas en un momento dado. Al contrario que en el contador de horas de servicio, no se mide el tiempo de operación puro del polipasto, sino que se capta y evalúa, según su incidencia, la carga que ha transportado que es mucho más importante para el desgaste del polipasto.El contador del módulo totalizador está calibrado de tal forma que la solicitación del captador con la carga nominal en el grupo de mecanismo 1 Bm se cuenta como valor LK y se incrementa en +1 por cada segundo.Por este motivo, el totalizador de solicitaciones es un instrumento eficaz para el control del polipasto.El usuario tiene la posibilidad de obtener de forma sencilla y mediante los protoco-los continuos del valor LK visualizado, sobre todo en relación con las medidas de conservación, datos importantes para planificar de modo favorable las operacio-nes de mantenimiento preventivo y efectuar reparaciones.Basándose en los valores LK de los protocolos, es posible también analizar la utilización de los polipastos a fin de planificar del modo adecuado medidas de ampliación o racionalización. La combinación con un contador de horas de servicio permite probar en cualquier momento el tipo de carga y la clase de tiempo de marcha según FEM.
Utilización prevista
Funcionamiento

272036
4244
.indd
/110
507
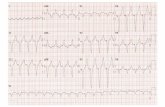
Cálculo de la vida útil consumida (SWP)
Con el totalizador de solicitaciones FWL se puede calcular la vida útil consumida hasta un momento dado y la correspondiente reserva de utilización restante, el espectro de cargas (LK).
En la medición la carga nominal del ZMS se toma como carga nominal de referencia. El FWL cuenta así los segundos con carga máxima del ZMS. En caso de que el ZMS (con carga nominal del polipasto) no sea sometido a su propia carga nominal, el valor visualizado se tiene que corregir aún con un factor. Este factor de corrección se debe anotar sólo una vez en el libro de controles de la grúa al efectuar la puesta en marcha. El cálculo teórico de la la vida útil teórica S en horas (según FEM 9.755) se realiza con la fórmula siguiente:
S = vida útil en horas de operación con carga máximaLK = estado del contador FWLLF = factor de espectro de solicitaciones
Ejemplo: DR 3 3mContador LK = 10014LF = 0,5425 x 106
S = LK × LF
Horas con carga máxima S = 10014 x 0,0005425 = 5,43 horas
L1, L2, L3, PE
F1
K2
M3
M1
K3K1
K1
K2
U113
14
K2 K3
S3
K3
S3
K3
U123
24
S3
K2
S3
U3A1 1 2 3
A2 4 5 7
S2 S1
U2
ZMSB1
U1
A1
A2 2 31
FWL
16
10
P1
K2 K3L4
L5
S1
S4
FGB-2
6
DenominacionesB1 = Captador dinamométrico F1 = Fusible „motor de elevación“K1 = Contactor „elevación/descenso de precisión“K2 = Contactor „elevación principal“K3 = Contactor „descenso principal“M1 = Motor de principal/de precisiónP1 = Contador de horas de servicioS1/S2 = Pulsadores elevación / descensoS3 = Final de emergencia elevación/descensoS4 = Final desconx. previa elevación principalU1 = Evaluador de frecuencias/totalizador de solicitaciones, sobrecargaU2 = Generador de frecuencia FGB-2U3 = Mando del polipasto (entre otros 250 ms de
bloqueo de reconexión)
FGB-2/FWL como seguro contra sobrecarga y totalizador de solicitaciones para polipastos con motor de polos conmutablesMicroint. 8 EIN = seguro contra sobrecarga
42356544.eps
verd
e
apan
t.bl
anco
mar
rón
verd
eap
ant.
mar
rón
blan
coam
ar.
de precisión principalElevación Descenso Elevación DescensoFig. 12

28 2036
4244
.indd
/110
507
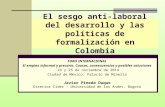
Final de carrera traslación carro
Interruptor de posición XCK - MR
42355444.eps
Posiciones de cruce de conexiones con disposiciones de contactos
Tipo XCK-MR54D1
con tope de giro
Características:Carcasa: Cinc de fundición a presiónGrado de protección: IP66Vida útil mecánica 2 mill. ciclos de conexiónVelocidad de accionamiento: máximo 90 m/min
Momento de accionamiento mínimo: 0,5 Nm
Apertura forzosa: 0,75 Nm
Entrada cable de potencia: 3 x M20
Datos operativos asignados: AC-15: 240 V; 3 A DC-13: 125 V; 0,55 A
Conexión/sección: Borne plano con arandela M3,5/máximo 2 x 1,5mm²Conexión/sección conductor de prot.: Borne plano con arandela M3,5/máximo 1,5 mm²
Protección contra cortocircuitos: Fusible 10 A, gG (gL)
Tipo de contactos: sin ruptura brusca, apertura forzosa de los contactos 21-22
Bloque de cont. „A“
Conector de retención positiva 6,3 mm
Conector, 3 polos
Conector, 3 polos
Conector -X16
cond. 1 en pin 1cond. 2 en pin 2cond. 3 en pin 3
cond. 4 en pin 1cond. 5 en pin 2cond. 6 en pin 3
Conector -X48
Interruptor de posiciónconmutando de forma escalonada2 veces con tope de giro
retirado 5 mm sin casquillo
Bloque de cont. „B“
Prensaestopas M20 con rosca larga (aprox. 15 mm)
Conexión del cable en el interruptor
+180° +90° 0° -180°-90°
A11 A12B21 B22B11 B12
Fig. 13

292036
4244
.indd
/110
507
Paquetes opcionales
DR-PRO y DR-COMPaquete 1
Paquete 1.1 1.2Convertidor DIC-4-004 DIC-4-007
537 713 84 537 715 84Resistencia de frenado 120 ohmios 0,4 KW
- 537 732 84
Resistencia de frenado 220 ohmios 0,2 KW
537 730 84 -
Pedir aparte el cable entre el motor del carro y el convertidor, p. ej. 4 x 1,5 + 2 x (2x0,5), nº de ref.: 719 096 45
Final de carrera
trasl. carro
EKDR 3 - 10 con fi jación mecánica 719 074 45
EZDR 5 - 10 con fi jación mecánica 719 174 45
Paquete 3.1 3.2 3.3 3.4 3.5 3.6Polip. de cable DR 3 DR 5, 10 DR 3 DR 5, 10 DR 3 DR 5, 10
ZMS 1)0,625 t 1,25 t 0,625 t 1,25 t 0,625 t 1,25 t
491 390 44 491 391 44 491 390 44 491 391 44 491 390 44 491 391 44FGB-2 (bornes) 469 674 44
FWL469 669 44 469 668 44 469 667 44
42-48 V 110-120 V 220-240 V
Pedir aparte el cable LIYCY 3 X 0,5 mm² entre el FGB-2 y el FWL, nº de ref.: 464 495 44
Convertidor de frecuencia para carro
Final de carrera traslación carroDR-PRO y DR-COMPaquete 2Selección sobre lógica instalada en fábrica
Limitación de sobrecarga serie Fsólo para DR-PROPaquete 3Selección sobre lógica instalada en fábrica
La parametrización del convertidor se puede realizar bien con una unidad de manejo (véase tabla 1) o un módulo de interface y el sotfware de parametrización “Parcom Compact” (véase tabla 2).
Unidad de manejo KP 500 537 722 84
Accesorios para parametrización
Módulo de interface KP232 537 769 84Módulo RS 232 CM - 232 537 723 84Cable de datos PC 1,8 m 537 237 84Software de parametrización Parcom Compact 537 752 84
Tabla 1
Tabla 2
1) En DR 5 y DR 10 ZMS se incluye en el precio base en ejecución para dos ranuras

30 2036
4244
.indd
/110
507
Notas

312036
4244
.indd
/110
507
Notas

Demag Cranes & Components GmbHPostfach 67 · D-58286 WetterTeléfono (+ 2335) 92-0 · Telefax (+ 2335) 927676www.demagcranes.de
Prin
ted
in G
erm
any
La reproducción total o parcial sólo se permite con la autorización de Demag Cranes & Components GmbH, 58286 Wetter (Alemania). Salvo errores de imprenta, omisiones y modiificaciones.