ECODRIVE Reguladores DKC01.1/DKC11.1 para sistemas de ...
105
ECODRIVE Reguladores DKC01.1/DKC11.1 para sistemas de accionamiento 2 7 6 7 0 1 3UR\HFWR ’2.(&2’59’.&35-(63•
Transcript of ECODRIVE Reguladores DKC01.1/DKC11.1 para sistemas de ...

ECODRIVEReguladores DKC01.1/DKC11.1 para
sistemas de accionamiento
2 7 6 7 0 1
3UR\HFWR
'2.(&2'59'.& 35-(63•

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
ECODRIVE - reguladores DKC01.1/DKC11.1 para sistemas deaccionamiento
Proyecto
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P
• Archivador 15
• 209-0069-4390-02
Denominación del documento Fecha Notas
209-0069-4390-00 DE/05.96
209-0069-4390-01 DE/06.96
DOK-ECODRV-DKC01/11.1*-PRJ1-DE-P
DOK-ECODRV-DKC01/11.1*-PRJ1-DE-P
Mayo 96
Junio 96
Julio 96
Mayo 97
Primera edición
Corrección
Nueva edición
Corrección
INDRAMAT GmbH, 1996
Queda absolutamente prohibida sin la debida autorización la distribucióny duplicación del presente documento, su utilización con finalidadcomercial, y la divulgación de su contenido. En caso de violación decuanto dicho rige la obligación de indemnización por daños. Se reservantodos los derechos de patente y de modelo de utilización depositados.(DIN 34-1)
INDRAMAT GmbH • Bgm.-Dr.-Nebel-Str. 2 • D-97816 Lohr a. Main
Teléfono 09352/40-0 • Tx 689421 • Fax 09352/40-4885
Dep. ENA (VS, HE)
Con reserva de modificar el contenido de la documentación y de ladisponibilidad al suministro de los productos.
Título
Naturaleza del documento
Tipo de documento
Referencia interna
Modificaciones
Marca registrada
Editor
Vínculo

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
El documento facilita informaciones para:
• el proyecto de la estructura mecánica del armario eléctrico;
• el proyecto del equipo eléctrico que se ha de instalar en el armario;
• la utilización logística de los aparatos;
• la predisposición de los equipos para la puesta en funcionamiento.
"ECODRIVE - sistemas de servoaccionamiento DKC con MKD"
- Datos de selección -
DOK-ECODRV-DKC+MKD****-AUS1-DE-P
para seleccionar la combinación motor - regulador.
"ECODRIVE - servomotores MKD"
- Proyecto -
209-0069-4377-02 DE/03.96
para la descripción detallada de los servomotores y selección de loscables necesarios.
"ECODRIVE - reguladores DKC01.1/DKC11.1 para “sistemas deaccionamiento"
- Descripción del funcionamiento -
DOK-ECODRV-DKC01/11.1-FKB1-DE-P
para la prueba y selección de las funciones.
"Compatibilidad electromagnética de los sistemas de accionamiento y demando”
- Proyecto -
209-0049-4305-02 DE/04.96
para el proyecto y la instalación de los sistemas de accionamiento deconformidad con la compatibilidad electromagnética.
Finalidad del documento
Otros documentos

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Contenido I
Contenido
35(6(17$&,Ï1'(/6,67(0$
1.1 Características de utilización................................................................................................................ 1-1
1.2 Funciones............................................................................................................................................. 1-1
1250$6'(6(*85,'$'3$5$6,67(0$6'($&&,21$0,(172(/e&75,&2
2.1 Generalidades...................................................................................................................................... 2-1
2.2 Protección contra el contacto de componentes eléctricos................................................................... 2-2
2.3 Protección contra las descargas eléctricas mediante baja tensión de seguridad (PELV)............ 2-3
2.4 Protección contra movimientos peligrosos........................................................................................... 2-4
2.5 Protección contra los campos magnéticos y electromagnéticos durante el funcionamiento y lainstalación .................................................................................................................................................. 2-6
2.6 Protección durante el desplazamiento y el montaje............................................................................. 2-7
2.7 Seguridad en la utilización de baterías ................................................................................................ 2-7
6(/(&&,Ï1'(/26&20321(17(6
3.1 Esquema de los componentes necesarios........................................................................................... 3-1
3.2 Modalidad de selección........................................................................................................................ 3-2
3.3 Recogida de los datos necesarios ....................................................................................................... 3-3
5(*8/$'25(6(&2'5,9('.&
4.1 Hardware.............................................................................................................................................. 4-1Vista del aparato.............................................................................................................................. 4-1Diseños acotados y dimensiones máximas..................................................................................... 4-2Datos técnicos ................................................................................................................................. 4-4Código de identificación y placa ...................................................................................................... 4-6
4.2 Firmware .............................................................................................................................................. 4-8
4.3 Esquemas eléctricos............................................................................................................................ 4-9Vista anterior con terminales ........................................................................................................... 4-9Esquemas generales de las conexiones ......................................................................................... 4-9
4.4 Conexión eléctrica al tablero de bornes............................................................................................. 4-15X1 - interfaz serial.......................................................................................................................... 4-15X2 - interfaz de posicionamiento o del motor paso/paso............................................................... 4-17X3 - entradas y salidas analógicas ................................................................................................ 4-25X4 - conexiones del circuito de mando.......................................................................................... 4-30X5, X6, X7 - conexiones del motor ................................................................................................ 4-31X9 - conexiones del circuito intermedio ......................................................................................... 4-31

ECODRIVE DKC01.1/DKC11.1
II Contenido DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
0Ï'8/2%/(('(5683/(0(17$5,2%=0
5.1 Dimensionamiento de los componentes importantes para la energía de retorno................................ 5-1
5.2 Diseño acotado y dimensiones máximas............................................................................................. 5-5
5.3 Datos técnicos...................................................................................................................................... 5-5
5.4 Vista anterior ........................................................................................................................................ 5-6
5.5 Conexión eléctrica................................................................................................................................ 5-6
5.6 Código de identificación y placa........................................................................................................... 5-7
0Ï'8/2&21'(16$'25683/(0(17$5,2&=0
6.1 Dimensionamiento ............................................................................................................................... 6-1
6.2 Diseño acotado y dimensiones máximas............................................................................................. 6-3
6.3 Vista anterior ........................................................................................................................................ 6-4
6.4 Conexión eléctrica................................................................................................................................ 6-4
6.5 Código de identificación y placa........................................................................................................... 6-5
*58326'(5(''&9170
7.1 Recomendaciones para su utilización.................................................................................................. 7-1
7.2 Datos técnicos...................................................................................................................................... 7-1
7.3 Diseños acotados y dimensiones máximas ......................................................................................... 7-2
7.4 Vistas anteriores .................................................................................................................................. 7-2
7.5 Conexión eléctrica................................................................................................................................ 7-3
7.6 Código de identificación....................................................................................................................... 7-4
),/7526'(5('1)'1)(
8.1 Selección.............................................................................................................................................. 8-1
8.2 Diseño acotado y dimensiones máximas............................................................................................. 8-2
8.3 Conexión eléctrica................................................................................................................................ 8-3
8.4 Filtros de red para grupos de red DC24V NTM ................................................................................... 8-4
8.5 Código de identificación....................................................................................................................... 8-5
75$16)250$'25(6'67'/7
9.1 Selección.............................................................................................................................................. 9-1
9.1 .............................................................................................................................................................. 9-1
9.2 Autotransformadores para DKC**.*-040-7-FW .................................................................................... 9-1
9.3 Transformadores para DKC**.*-030-3-FW .......................................................................................... 9-4
9.4 Conexión eléctrica del DKC mediante transformador.......................................................................... 9-6
9.5 Código de identificación....................................................................................................................... 9-7

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Contenido III
352<(&72'(/$50$5,2(/e&75,&2
10.1 Advertencias para la instalación en el armario eléctrico.................................................................. 10-1Potencia disipada........................................................................................................................... 10-1
10.2 Instalación de los grupos de enfriamiento en los armarios eléctricos.............................................. 10-2
&21(;,Ï1'(327(1&,$
11.1 Conexión directa a la red ................................................................................................................. 11-1
11.1 .......................................................................................................................................................... 11-1
11.2 Contactor general/protección........................................................................................................... 11-2
11.2 .......................................................................................................................................................... 11-2Cálculo de la corriente de fase de red........................................................................................... 11-2Selección de la protección Q1 y del contactor general K1 ............................................................ 11-2
11.3 Circuito de mando de la conexión de potencia ................................................................................ 11-4
11.4 Protección contra el contacto indirecto ............................................................................................ 11-5
35(3$5$7,9263$5$/$38(67$(1)81&,21$0,(172 Equipo necesario ........................................................................................................................... 12-1
(67$'2'(680,1,6752'(/26&20321(17(6'(/6,67(0$'($&&,21$0,(172
Embalaje........................................................................................................................................ 13-1Documentos de expedición............................................................................................................ 13-1Identificación de los componentes................................................................................................. 13-1
Ë1',&($1$/Ë7,&2

ECODRIVE DKC01.1/DKC11.1
IV Contenido DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Presentación del sistema 1-1
1 Presentación del sistema
1.1 Características de utilización
El sistema de accionamiento con los reguladores ECODRIVE es lasolución económica y funcional en casi todos los campos de utilización enlos que se requiere la automatización de movimientos de traslación ogiratorios.
Las principales características de este sistema de accionamiento son:valores de potencia excepcionales, funciones globales y relación entreprecio/ servicio favorable.
• Las características técnicas de utilización del producto son:
• aplicación universal;
• costes totales contenidos;
• sistema de regulación digital;
• dinámica elevada;
• reducción de los costes gracias a la conexión directa a la red;
• limitador de carrera software;
• marcación de la posición absoluta o incremental;
• transmisión de la posición absoluta o incremental;
• mando integrado del freno de parada;
• mayor seguridad de funcionamiento;
• posibilidad de configuración de la reacción a las anomalías;
• adaptación automática de los parámetros;
• puesta en funcionamiento fácil.
1.2 Funciones
Las funciones del sistema digital inteligente de accionamiento dependenen primer lugar de la interfaz del controlador, y en segundo lugar, delcampo de empleo de los reguladores ECODRIVE.
El regulador DKC01.1 se utiliza como:
• servoaccionamiento con mando integrado de posicionamiento;
• servoaccionamiento con interfaz analógica de régimen y marcaciónintegrada de la posición efectiva;
• servoaccionamiento con interfaz para el motor paso/paso.
El regulador DKC11.1 representa una solución económica. Se utilizacomo:
servoaccionamiento con interfaz de régimen analógica y marcaciónintegrada de la posición efectiva.

ECODRIVE DKC01.1/DKC11.1
1-2 Presentación del sistema DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Servoaccionamiento con mando integrado deposicionamiento
PLC Regulador DKC01.1 con interfaz dePOSICIONAMIENTO
ServomotorAC MKC
Ficha I/O
Entradas de mando
Salidas de estado
Valor efectivode posición
PC MS-DOS®
ParámetrosDiagnosisDatos defuncionamiento
RS 485
Bloqueos deposicionamientomemorizados
Interpolación fin
Regulación de laposición
Regulación de lavelocidad
Regulación de lacorriente del estatororientada al campo
2° posición 121 posición 22
2 .
.2
4 posición 32
Calculador del accionamiento
M3~
•
FS0200D4.fh7
Interfaz de posiciónde alta resolución
•
RS 232
Seleccióndispositivosbloqueos deposicionamiento
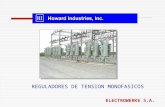
Fig. 1-1: Servoaccionamiento con mando integrado de posicionamiento
• En el regulador pueden memorizarse hasta 32 bloqueos delposicionamiento que se pueden seleccionar mediante entradasparalelas. La realización de un bloqueo de posicionamiento esautomática.
• La adaptación de elementos mecánicos de transmisión, como lasrelaciones del reductor o las constantes de avance, se realizanmediante el accionamiento.
• Todos los valores de posición, velocidad, y aceleración pueden serajustados por movimientos giratorios o de traslación en función de lacinemática de los ejes.
• Para la generación de la referencia dimensional, el sistema utiliza eladecuado procedimiento interno.
• En fase de preparación el eje puede ser accionado mediante lafunción de desplazamiento por impulsos.
• La velocidad de posicionamiento puede ser modificada con el feedrateoverride.
• Para la limitación de la carrera se dispone de las entradas de losinterruptores de tope y de los valores límite de posición identificables.
• El estado del accionamiento puede ser evaluado mediante las salidasde estado.

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Presentación del sistema 1-3
Servoaccionamiento con interfaz analógica de régimen y demarcación integrada de la posición efectiva
M
3~
Regulador DKC01.1 ó DKC11.1 coninterfaz ANALÓGICA
Servomotor ACMKDControlador con regulación de la posición
Kv+W
-X
Interfaz deposición
AD
Valor nominal develocidad,
analógico± 10Voltios
Regla
AD
RS 485
Valor nominalde posición
FS0201D4.fh7
RS 232
PC MS-DOS®
ParámetrosDiagnosisDatos defuncionamiento
Regulación de lavelocidad
Regulación de lacorriente del estatororientada al campo
Calculador delaccionamiento
Interfaz de posiciónde alta resolución
ParámetrosDiagnosisDatos defuncionamiento
Valor efectivode posición
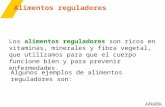
Fig. 1-2: Servoaccionamiento con interfaz analógica de régimen ymarcación integrada de la posición efectiva
• El valor nominal analógico de régimen puede ser establecido avoluntad del usuario.
• Para la emisión del valor efectivo es posible elegir entre posiciónincremental y posición absoluta.
• Una entrada permite poner fuera de servicio al accionamiento,independientemente del valor nominal efectivo, y de pararlo sinderivación, cuando la regulación es activa.

ECODRIVE DKC01.1/DKC11.1
1-4 Presentación del sistema DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Servoaccionamiento con interfaz para el motor paso/paso
M3~
Regulador DKC01.1 coninterfaz del MOTOR PASO/PASO
Controlador con generaciónimpulsos de paso
Interpolatión
adelante
atrás
Interfaz del motorpaso/paso
-Generaciónimpulsos de paso
FS0202D4.fh7
ServomotorAC MKCPC MS-DOS®
ParámetrosDiagnosisDatos defuncionamiento
RS 485
Interpolación fin
Regulación de laposición
Regulación de lavelocidad
Regulación de lacorriente del estatororientada al campo
Calculador del accionamiento
Interfaz de posiciónde alta resolución
RS 232
Valor efectivode posición
~
Fig. 1-3: Servoaccionamiento con interfaz para el motor paso/paso
• El número de pasos para cada giro del rotor puede establecerse avoluntad del usuario entre 16 y 65536.
• La frecuencia máxima de paso no depende de la carga. Gracias alfuncionamiento por regulación de posición, la eventual “omisión” depasos es técnicamente imposible.
• Para el intercambio de señales entre el controlador y el regulador esposible configurar la interfaz del motor paso/paso según tresdefiniciones estándar de las señales:
- señales de cuadratura;- señales adelante/atrás;- señales de paso y de dirección.
• Para la generación de la referencia dimensional, el sistema utiliza unprocedimiento interno específico.
• En la fase de preparación el eje puede ser accionado mediante lafunción de desplazamiento por impulsos.
• La velocidad de posicionamiento puede ser modificada con el feedrateoverride.
• Para la limitación de la carrera se dispone de las entradas de losinterruptores y de los valores límite de posición identificables.

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Normas de seguridad para sistemas de accionamiento eléctrico 2-1
2 Normas de seguridad para sistemas deaccionamiento eléctrico
Las siguientes normas de seguridad deberán leerse antes de la primerapuesta en funcionamiento de la instalación y deben ser rigurosamenterespetadas.
En caso de cesión del aparato también deberán entregarse las siguientesnormas de seguridad.
ATENCIÓN
La utilización impropia de estos aparatos y lainobservancia de las advertencias que se indican eneste documento, pueden ser causa de dañosmateriales, lesiones físicas, o en caso extremos, deaccidentes mortales.
2.1 Generalidades
• INDRAMAT GmbH no se asume ninguna responsabilidad por los dañosderivados de la inobservancia de las advertencias indicadas en este manualde utilización.
• Cuando el idioma de edición de este documento impida su plenacomprensión, antes de la puesta en funcionamiento, se deberá solicitar laedición en la propia lengua madre.
• El funcionamiento regular y seguro de estos aparatos está subordinado acondiciones correctas de transporte, almacenaje, montaje, y de instalaciónasí como a la meticulosidad en la utilización y en el mantenimiento.
• Personal cualificado:• Cualquier tipo de intervención en los aparatos o en la zona que los circunda,
debe ser realizado por personal adecuadamente cualificado. Por cualificadose entiende personal que tenga una suficiente familiaridad con el montaje, lainstalación, y el funcionamiento del producto, así como con todas lasadvertencias y las precauciones indicadas en este documento, y quedisponga además de los necesarios conocimientos o autorizaciones para laactivación, desactivación, conexión a tierra, y marcación de circuitos yaparatos, en conformidad con las disposiciones de la técnica de seguridad.Dicho personal debe, además, poseer el adecuado equipo de seguridad yhaber realizado un curso de primeros auxilios.
• Utilizar exclusivamente los recambios autorizados por el fabricante.• Respetar las normas y las disposiciones de seguridad válidas para la
aplicación específica.• Los aparatos están destinados para la instalación a bordo de máquinas
ubicadas en locales industriales.• Está prohibido iniciar la puesta en funcionamiento hasta que no se haya
comprobado la conformidad de la máquina en la cual han sido instalados losproductos, con las disposiciones y las normas de seguridad nacionales.
Países europeos: Directiva CEE 89/392/CEE (Directiva máquinas).• El funcionamiento está permitido exclusivamente si han sido respetadas las
prescripciones en materia de compatibilidad electromagnética válidas para laaplicación específica.Países europeos: Directiva CEE 89/336/CEE (Directiva sobre lacompatibilidad electromagnética).Para las instrucciones referentes a la correcta instalación en términos decompatibilidad se remite al documento “Compatibilidad electromagnética desistemas de accionamiento AC y de controladores”.

ECODRIVE DKC01.1/DKC11.1
2-2 Normas de seguridad para sistemas de accionamiento eléctrico DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
El respeto de los valores límites de la normativa nacional es deresponsabilidad del fabricante de la instalación o de la máquina.
• Los datos técnicos y las condiciones de conexión a la red y de instalación seobtienen de la documentación del producto y deben ser rigurosamenterespetadas.
2.2 Protección contra el contacto de componentes eléctricos
Nota: Sólo para aparatos y componentes del accionamiento contensiones superiores a los 50 Voltios.
Los componentes que presentan una tensión superior a los 50 Voltiospueden ser peligrosos para el personal. Durante el funcionamiento de loscomponentes eléctricos algunas partes están necesariamente sometidasa alta tensión.
PELIGRO
¡Alta tensión!¡Peligro de muerte o de graves lesiones físicas!⇒ En caso de intervención en las instalaciones de alta
tensión, es necesario respetar las normas generales deinstalación y de seguridad.
⇒ Antes del encendido, verificar que el conductor deprotección ha sido conectado a todos los componenteseléctricos según el esquema de conexiones.
⇒ El funcionamiento, incluso para breves intervencionesde medición o de control, está permitido sólo si elconductor de protección ha sido conectado a todos lospuntos de los componentes previstos al objeto.
⇒ Antes de cualquier intervención en los componenteseléctricos que tienen tensiones superiores a 50 Voltios,desconectar el aparato de la red o del alimentador.Cerciorarse de que la alimentación no puede serreactivada.
⇒ Después de la desactivación dejar transcurrir 5 minutosantes de operar en los aparatos, para permitir ladescarga de los condensadores. Antes de iniciar lostrabajos, medir la tensión de los condensadores paraexcluir cualquier peligro en caso de contacto con ellos.
⇒ Con la alimentación activada no tocar las conexioneseléctricas de los componentes.
⇒ Antes de activar el aparato, cubrir adecuadamente laspartes sometidas a tensión para excluir la posibilidad decontacto. Los aparatos pueden ser accionados sólo siposeen las adecuadas protecciones contra descargas.
⇒ Para los sistemas de accionamiento AC no se admite elempleo de dispositivos contra la corriente de avería. Laprotección contra el contacto indirecto se debe realizarde otro modo, por ejemplo, con un dispositivo deprotección contra la sobrecarga de corriente conformecon las normas aplicables.
Países europeos: según EN 50178/1994, párrafo5.3.2.3.
⇒ Para los aparatos a encastre la protección contra elcontacto directo se debe garantizar por medio de unaenvoltura externa, por ejemplo con un armario eléctrico.Países europeos: según EN 50178/1994, párrafo5.3.2.3.

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Normas de seguridad para sistemas de accionamiento eléctrico 2-3
ATENCIÓN
¡Alta corriente dispersa!¡Peligro de muerte o de graves lesiones físicas!⇒ Antes del encendido enlazar con el conductor de
protección en el punto de tierra o poner a tierra elequipo eléctrico, todos los aparatos eléctricos, y losmotores.
⇒ La corriente dispersa supera los 3,5 mA. Losaparatos deben por lo tanto estar conectadospermanentemente a la red de alimentación. Paíseseuropeos (EN 50178/1994, párrafo 5.3.2.3).
⇒ Antes de la puesta en funcionamiento conectarsiempre el conductor de protección, o efectuar laconexión con el cable de tierra, incluso sólo paraeventuales pruebas. En caso contrario puedecrearse alta tensión en la carcasa.
2.3 Protección contra las descargas eléctricas mediantebaja tensión de seguridad (PELV)
Todos los conectores y bornes de los productos INDRAMAT que tienenun valor de tensión comprendido entre 5 y 50 Voltios son componentesde baja tensión de seguridad y están protegidos contra las descargas enconformidad con las siguientes normas.
• norma internacional: IEC 364-4-411.1.5;
• países de la UE: EN 50178/1994, párrafo 5.2.8.1.
ATENCIÓN
¡Alta tensión en caso de conexión errónea!¡Peligro de muerte o de lesiones físicas!⇒ A los conectores y a los bornes con tensiones
comprendidas entre 0 y 50 Voltios puedenconectarse sólo aparatos, componentes eléctricos, ycables de baja tensión de seguridad (PELV=Protective Extra Low Voltage).
⇒ Conectar exclusivamente tensiones y circuitoseléctricos adecuadamente separados de tensionespeligrosas. La separación segura se obtiene, porejemplo, con el empleo de transformadores dedesacoplamiento, con aisladores ópticos seguros, ocon baterías de alimentación.

ECODRIVE DKC01.1/DKC11.1
2-4 Normas de seguridad para sistemas de accionamiento eléctrico DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
2.4 Protección contra movimientos peligrosos
Pueden ocasionarse movimientos peligrosos después de unaccionamiento erróneo de los motores conectados.
Las causas pueden ser de vario tipo:
• cableado erróneo;
• accionamiento incorrecto de los componentes;
• anomalía de los transductores de medición y de señal;
• defectos de los componentes;
• error software.
Estos errores pueden producirse inmediatamente después de laactivación, o bien, durante el funcionamiento después de un lapso detiempo indefinible.
Los dispositivos de control de los componentes del motor excluyen quepuedan producirse anomalías de funcionamiento en los sistemas deaccionamiento conectados, pero respecto a la seguridad del personal, noes lícito confiar únicamente en este hecho. Antes de que los dispositivosde control sean operativos, puede verificarse un movimiento anómalocuyas proporciones dependen del tipo de anomalía y del estado defuncionamiento.

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Normas de seguridad para sistemas de accionamiento eléctrico 2-5
PELIGRO
¡Movimientos peligrosos!¡Peligro de muerte, de graves lesiones físicas o dedaños materiales!⇒ Debido a los motivos citados anteriormente, la
protección del personal debe ser aseguradamediante dispositivos de control o medidasjerárquicamente superiores a la instalación, y serdefinidas por el fabricante según las condicionesespecíficas de la instalación y en base a los análisisde los peligros, y de las anomalías, y en el respetode las normas de seguridad para la mismainstalación.
Prevención de accidentes:
⇒ No detenerse en la zona de movimiento de lamáquina. Medidas posibles para impedir el accesoinvoluntario de personas:- cercado de protección;- enrejado de protección;- cubierta de protección;- relé fotoeléctrico.
⇒ Los cercados y las cubiertas de protección debentener la resistencia suficiente para contrastar lamáxima energía posible de las partes enmovimiento.
⇒ Ubicar el interruptor de parada de emergencia en unlugar de fácil acceso y en las cercanías deloperador. Verificar el funcionamiento normal deldispositivo de emergencia antes de la puesta enfuncionamiento.
⇒ Prever un circuito de desactivación de emergencia outilizar un bloqueo antiencendido seguro para laprotección contra la activación involuntaria debido ala activación de la conexión de potencia del motor.
⇒ Parar los motores antes de entrar en la zonapeligrosa.
⇒ Interrumpir la alimentación del equipo eléctricoactuando en el interruptor general, y asegurarse deque no pueda ser reactivada por:- intervenciones de mantenimiento y de reparación;- intervenciones de limpieza;- antes de largas interrupciones del funcionamiento.
⇒ Evitar el uso de aparatos de alta frecuencia, demandos a distancia, o de aparatos de radio enproximidad de los componentes electrónicos y de lascorrespondientes líneas de alimentación. Si cuantodicho no fuera posible, antes de la primera puesta enfuncionamiento, verificar el sistema y la instalaciónen todas las posibles posiciones de utilización dedichos aparatos. Eventualmente puede sernecesaria una prueba especial de la compatibilidadelectromagnética de la instalación.

ECODRIVE DKC01.1/DKC11.1
2-6 Normas de seguridad para sistemas de accionamiento eléctrico DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
2.5 Protección contra los campos magnéticos yelectromagnéticos durante el funcionamiento y lainstalación
La presencia de campos magnéticos y electromagnéticos cerca deconductores eléctricos y de magnetos permanentes (inducidos) constituyeun serio peligro para las personas con marcapasos, prótesis metálicas yaparatos acústicos.
ATENCIÓN
¡Peligro para la salud de personas con marcapasos,prótesis metálicas y aparatos acústicos cerca deequipos eléctricos¡⇒ Se prohibe el acceso a personas con marcapasos y
prótesis metálicas en las zonas siguientes:− zonas donde estén instaladas o en función
equipos eléctricos;− zonas destinadas al almacenaje, reparación, o
montaje de componentes de motores conmagnetos permanentes.
⇒ En el caso de que personas con marcapasos tenganque necesariamente acceder a dichas zonas,deberán antes solicitar la opinión de un médico.La resistencia a las interferencia de los marcapasoses extremadamente variable, por lo tanto no existenreglas de validez general.
⇒ Antes de acceder a dichas zonas, los portadores deprótesis metálicas, esquirlas metálicas, o deaparatos acústicos deben consultar un médico yapodría verse comprometido su estado de salud.

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Normas de seguridad para sistemas de accionamiento eléctrico 2-7
2.6 Protección durante el desplazamiento y el montaje
El desplazamiento y el montaje incorrecto de determinados componentesdel sistema de accionamiento, pueden, en condiciones desfavorables, sercausa de lesiones.
ATENCIÓN
¡Peligro de lesiones en caso de desplazamientoincorrecto!¡Lesiones físicas producidas por aplastamiento, corte,fractura, impacto!⇒ Observar las normas generales de instalación y de
seguridad para el desplazamiento y el montaje.⇒ Adoptar equipos de montaje y de transporte
adecuados.⇒ Adoptar las medidas adecuadas para evitar que
partes del cuerpo queden enganchadas oaplastadas.
⇒ Utilizar exclusivamente equipos adecuados. Siprescritos, utilizar equipos especiales.
⇒ Si es necesario utilizar el adecuado vestuario deprotección (como por eje. gafas de protección,zapatos de seguridad, guantes).
⇒ No detenerse bajo cargas suspendidas.⇒ Eliminar inmediatamente los líquidos del suelo para
evitar el peligro de deslizamiento.
2.7 Seguridad en la utilización de baterías
Las baterías están formadas por sustancias químicas activas contenidasen una envoltura rígida. La utilización inadecuada de éstas puede ser lacausa de lesiones físicas o de daños materiales.
ATENCIÓN
¡Peligro de lesiones en caso de utilizacióninapropiada!
⇒ No intentar reactivar las baterías descargadasmediante calor u otros medios (peligro de explosióny de contaminación química)
⇒ No recargar las baterías, ya que pueden explotar oliberar las sustancias que se encuentran en ellas.
⇒ No tirar las baterías en el fuego.⇒ No desarmar las baterías.⇒ No dañar los componentes eléctricos montados en
los aparatos.
Advertencia: ¡Protección del ambiente y eliminación de desechos!Según las disposiciones de ley, las bateríascontenidas en el producto se deben considerar comoproducto peligroso para el transporte por tierra, mary aire (peligro de explosión). Eliminar las bateríasviejas separadamente del resto de los desechos.Observar las disposiciones válidas en el país deinstalación de la máquina.

ECODRIVE DKC01.1/DKC11.1
2-8 Normas de seguridad para sistemas de accionamiento eléctrico DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Selección de los componentes 3-1
3 Selección de los componentes
3.1 Esquema de los componentes necesarios
EB0202D4.fh5
Q1
K1
NFD
DST
DKC
NFE
NTM
BZM CZM
MKD
PC
Protección
Grupo de red
Filtro de redpara grupo
de red
Transformador
Filtro de red para conexiónde potencia
Contador general
Regulador
FWA
Firmware
Programa para la puestaen funcionamiento
Drive Top
Módulo bleedersuplementario
Módulo condensadorsuplementariol
Los componentes de color gris son necesarios en cualquier caso.
Tensión de red
DC 24 V
Cable para feedback IKS preensamblado
Cable para feedback IKG preensamblado
Servomotor
Fig. 3-1:Esquema de los componentes necesarios

ECODRIVE DKC01.1/DKC11.1
3-2 Selección de los componentes DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
3.2 Modalidad de selección
⇒ Dimensionar el accionamiento en función de las tareas que tiene quedesempeñar. Actualmente está en fase de preparación un documentoa este respecto.
⇒ Seleccionar la combinación motor-regulador (DKC + MKD) con laayuda del documento "Datos de selección" (ver otros documentos enla pág. 3).
⇒ Registrar los valores obtenidos del dimensionamiento, y de laselección del accionamiento, en el cuadro de la Fig. 3-2.
⇒ Calcular la potencia continua de retorno según las indicacionesfacilitadas en el capítulo 5 y registrarla en el cuadro de la Fig. 3-2.
⇒ Para el DKC01.1-*** y el DKC11.1-*** utilizar el firmware "FWA-ECODRV-ASE-02VRS-MS" (actualmente no es necesaria ningunaselección).
⇒ Para la conexión entre el DKC y el MKD seleccionar los cablespreensamblados con la ayuda del documento "Servomotores MKD -Proyecto" (ver “Otros documentos” en la pág. 3).
⇒ Seleccionar la protección Q1 (ver Cap. 11.2).⇒ Seleccionar el contactor general K1 (ver Cap. 11.2).
⇒ Controlar la tensión nominal de red:• Si para el DKC**.*-040-7 la tensión nominal de red supera el valor
3xAC(380-460)Voltios ± 10%, elegir un transformador DST (ver Cap.9.2).
• Si para el DKC**.*-030-3 la tensión nominal de red supera el valor3xAC230Voltios ± 10%, elegir un transformador DST (ver Cap. 9.3).
⇒ Controlar la tensión de mando DC24V para el DKC. Si no haydisponible una tensión de DC24 Voltios ± 20 %, elegir un apropiadogrupo de red NTM (ver Cap. 7).
⇒ Controlar la tensión DC24V para el freno de parada del motor. Si nohay disponible una tensión de DC24 Voltios ± 10 %, elegir unapropiado grupo de red NTM (ver Cap. 7).
⇒ Controlar la potencia continua de retorno. Si supera el valor de 0,15kW., verificar la aptitud de la solución con módulo bleedersuplementario BZM (ver Cap. 5).
⇒ Controlar la tensión máxima de retorno. Si supera los 5 kW., verificarla aptitud de la solución con DKC**.*-040-7, eventualmente conmódulo bleeder suplementario BZM (ver Cap. 5).
⇒ Si para el DKC**.*-040-7 la potencia continua de retorno es superior a0,1 kW. aprox. y el contenido de energía del sistema de accionamientoes inferior a 200Ws., puede ser conveniente el empleo de un módulocondensador suplementario CZM. Este permite reducir la potenciadisipada por el armario eléctrico del valor correspondiente a lapotencia continua de retorno (ver Cap. 6).
⇒ Verificar la compatibilidad electromagnética. Para respetar los valoreslímite, INDRAMAT aconseja el empleo de filtros de red NFD, NFE (verCap. 8).
Dimensionamiento y seleccióndel servoaccionamiento
Recogida de los datosnecesarios
Selección de los componentesindispensables
Definición de otroscomponentes

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Selección de los componentes 3-3
3.3 Recogida de los datos necesarios
Denominación Símbolo Valores/unidad demedida
Par efectivo con carga máx. MEFF
............................en Nm.
Par de aceleración MACC
........................... en Nm.
Par de trabajo MBEARB
........................... en Nm.
Régimen motor utilizado nNUTZ
......................... en min. -1
Momento de inercia con cargamáx.
JLAST
......................... en kgm.²
Energía giratoria máx. de lamecánica
(parada de emergencia)
WROT,MAX
............................ en Ws.
Potencia continua de retorno PRD
............................ en kW.
Par continuo de inactividad MDN
............................ en Nm.
Par máximo MMAX
............................ en Nm.
Par para servicio de breveduración
MKB
............................ en Nm.
Régimen máx. del motor nMAX
......................... en min. -1
Potencia enlazada necesaria SAN
........................... en kVA.
Tensión nominal de rednecesaria
UN
............................ en V.
Combinación motor - reguladorDKC.................................
MKD................................
Momento de inercia del motor JM
......................... en kgm.²
Corriente absorbida por el DKC IN,DC
0,7 en A.
Corriente absorbida por el frenode parada del motor(si previsto)
IN,HB
............................... en A.
Fig. 3-2: Datos necesarios para la selección de los componentes

ECODRIVE DKC01.1/DKC11.1
3-4 Selección de los componentes DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-1
4 Reguladores ECODRIVE DKC
4.1 Hardware
Vista del aparato
DKC**.*-030-3-FW(ITyp = 30 A)
DKC**.*-040-7-FW(ITyp = 40 A)
Conexión a la red1 x AC 230 Voltios obien3 x AC 230 Voltios
PI0200D4.fh7
Conexión a la redAC (de 380 a 460) Voltios
Conexión circuito intermedioparamódulo bleeder suplementarioBZMo bienmódulo condensadorsuplementario CZMo bienotros DKC
Fig. 4-1: Principales diferencias hardware de los DKC

ECODRIVE DKC01.1/DKC11.1
4-2 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Diseños acotados y dimensiones máximas
MB0201D4.fh7
min. 80 mm
210
258
25
Salida aire deenfriamiento
Entrada aire deenfriamiento
318
S1
343
360
8
Distancia ejes entre los aparatos
X8
X7
X6
H1
X5
X4
X3
X2
X1
min. 80 mm
17
32,565
70
M6 en plancha de montaje
7
7
Fig. 4-2: Diseño acotado y dimensiones máximas DKC01.1-030-3-FW

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-3
MB0202D4.fh7
min. 80 mm
210
258
1333
3
S1
343
360
8
32,565
70
X6
H1
X5
X4
X3
X2
X1
min. 80 mm
14
X7
X8
X9
7
7Salida aire deenfriamiento
Entrada aire deenfriamiento
Distancia ejes entre los aparatos
M6 en plancha de montaje
Fig. 4-3: Diseño acotado y dimensiones máximas DKC01.1-040-7-FW/DKC11.1-040-7-FW

ECODRIVE DKC01.1/DKC11.1
4-4 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Datos técnicos
Conexión a la red, grupo de potencia
Símbolo
UN
SMAX
IEIN
cos j
PPEAK
PCONT
fS
ITYP
IPEAK
PV
PBM,DKC
PBD,DKC
WMAX,DKC
WZW,DKC
CDKC
UZW
Denominación
Tipo de funcionamiento
Tensión de entrada de red
Potencia máx. enlazada
Corriente de conexión
Factor de potencia
Factor de distorsión de lacorriente de red
Potencia de punta máx. del motor
Potencia continua máx. del motor(con fS = 4 kHz)
Corriente permanente con fS = 4 kHz
Corriente de punta
Potencia disipada,sin disipación del bleeder
Potencia máxima bleeder DKC
Potencia continua bleeder DKC
Energía máx. de retorno DKC
Energía acumulable DKC
Capacidad circuito intermedio DKC
Tensión circuito intermedio
Unidad demedida
V
kVA
A
%
kW
kW
kHz
A
A
W
kW
kW
kWs
Ws
mF
V
DKC01.1-030-3-FW
monofásico
1 x AC 230± 10%
1,8
10
0,6
0,87
2,7
0,9
30
30
100
5 (für 1 s)
0,15
5,0
15
0,15
no transportado al exterior
trifásico
3 x AC 230± 10%
3,2
10
0,68
0,85
4
1,7
12
40
40
180
10 (für 0,5 s)
0,15
5,0
15
0,15
DC 500...800
DKC**.1-040-7-FW
3 x AC(380 ... 480)
4,8 ... 9
9 ... 12
0,75 ... 0,5
0,87 ... 0,85
10 ... 14
3,6 ... 5,0
4 oder 8
± 10%
k
fNFrecuencia de red Hz 50...60
4 oder 8
ICONT A 16
fS = 8 kHz 11ICONT A 12,5
TB0202D4.fh7
1)
1)
1) Para los datos de los sistemas de accionamiento en frecuencias de interrupción de 4 kHz. y 8 kHz. se remite al documento ÓECODRIVE - servoaccionamentosDKC con MKD” - Datos de selección -.
trifásico
Frecuencia de las interrupciones (a escoger)
Corriente permanente con
Corriente homologada
Fig. 4-4: Datos técnicos de conexión a la red y grupo de potencia

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-5
Alimentación de tensión DC24V
UN,DC
Conexión tensión de mandopara DKC
Tensión de entrada
Corriente absorbida
Conexión de tensión para frenode parada
V
DKC01.1-030-3-FW
0,7
± 20%DC 24
DKC**.1-040-7-FW
IN,DCA
UN,HBTensión de entrada V
Ver documentación del MKD
±DC 24
IN,HBA
TB0203D4.fh7
SímboloDenominación Unidad demedida
Corriente absorbida
Fig. 4-5: Datos técnicos de la alimentación de tensión DC24V
Condiciones ambientales y de funcionamiento
Para cada combinación motor - regulador se facilitan loscorrespondientes datos de selección. Ver el documento "ECODRIVE -sistemas de servoaccionamiento DKC con MKD"- Datos de selección - .
Los datos de selección son válidos en las condiciones ambientales y defuncionamiento indicadas. (ver Fig. 4-7) .
En condiciones diversas, el par para servicio de corta duración MKB, sereduce tal como indicado por los diagramas (ver Fig. 4-6). En presenciasimultánea de temperaturas ambiente diversas y de alturas de instalaciónsuperiores, es necesario multiplicar ambos factores de utilización.
DG0200D4.fh7
Carga admitida contemperatura ambiente superior
Fac
tor
de u
tiliz
ació
n
Temperatura ambiente en °C
1000 2000 3000 4000 5000
0,6
0,8
1
0,6
0,8
1
40 45 50 55 00Altura de instalación s.n.m. en m.
Carga admitida con altura deinstalación superior
Fac
tor
de u
tiliz
ació
n
Fig. 4-6: Carga admitida en función de la temperatura ambiente y de la alturade instalación
Temperatura ambiente y alturade instalación

ECODRIVE DKC01.1/DKC11.1
4-6 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Condiciones ambientales y defuncionamiento
Ventilación del grupo de potencia
Temperatura ambiente admitida conlos datos nominales reducidos
DKC01.1-030-3-FW
+55Los valores indicados en los datos de selección paraMDN y MKB se reducen en el intervalo de +45 a +55
°C un 2% por cada °C de más.
Ventilador internoConvección natural
DKC**.1-040-7-FW
TUM,MAX °C
Temperatura ambiente admitidacon los datos nominales
+0...+45TUM °C
Temperatura de almacenamiento yde transporte
-30...+85TL °C
Altura máx. de instalación con losdatos nominales
1000m
Humedad relativa máxima admitida 95%
Humedad absoluta máx. admitida 25g/m3
Grado de contaminación No se admiten impurezas y formación de rocío
Grado de protección IP20 según EN 60529 = DIN VDE 0470-1-1992 (IEC 529-1989)
Peso 4,4m kg
TB0204D4
SímboloDenominación Unidad demedida
Fig. 4-7: Condiciones ambientales y de funcionamiento
Código de identificación y placa
DKC 01.1 - 040 - 7 - FW
Tensión nominal circuito intermedio300 V700 V
Corriente homologada30 A40 A
Versión
Serie
Regulador
TL0200D4.fh7
DKC
0111
1
030040
37
Elementos del código: Ejemblo:
FirmwarePara el funcionamiento del regulador el firmware hade pedir por separado
FW
Fig. 4-8: Código de identificación del DKC

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-7
TS0200D4.fh7
DKC01.1-040-7-FW253158
SN253160-01708
K16/96
A03
Semana de producción
Número de serie Índice de modificación
Código de barras
Tipo di aparato
Número material
Fig. 4-9: Placa del DKC

ECODRIVE DKC01.1/DKC11.1
4-8 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
4.2 Firmware
Las características de funcionamiento de los reguladores ECODRIVE sondefinidas por el firmware instalado en cada uno de los reguladores.
Para los reguladores DKC01.1-***y DKC11.1-*** está disponible el "FWA-ECODRV-ASE-02VRS-MS".
Para el firmware existe una voz de orden a parte; por lo tanto es posibleordenar siempre la misma versión de firmware.
Los firmware son actualizados constantemente para eliminar eventualeserrores, sin modificar su funcionalidad. El nivel de actualización se indicaen el código de identificación.
Cuando se añaden nuevas funciones, el valor de índice de la versiónfirmware, se aumenta. (ver Código de identificación).
FW A-ECODRV-ASE-02 V RS-MS
Versión firmware (de 01 a 99)ej. 02
Tipo de firmware (alfanumérico)ej. ASE
Denominación del productoProducto: ECODRIVE
ClaseProducto (aparato)
Grupo
Firmware
TL0202D4.fh7
FW
A
ECODRV
ASE
02
Elementos del código: Ejemplo:
Naturaleza del firmwareVersión de pruebaEstándar
T
V
Versión del firmware (update)Se facilita el nivel de actualización válidoal momento de la entrega RS
Idioma (para las abreviacionesver INN 09.04, Parte 1)Plurilingüe MS
Fig. 4-10: Código de identificación del firmware ECODRIVE
TS0201D4.fh7
FWA-ECODRV-ASE-02VRS-MS266285
SN266285-06394
K19/96
V01
Semana de producción
Número de serie Versión
Código de barras
Tipo di firmware
Número material
Fig. 4-11: Placa del firmware

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-9
4.3 Esquemas eléctricos
Vista anterior con terminales
0,2...4 mm², AWG 24-10
123
Conexión de tensiónpara freno de parada
Conexión circuito intermedio (noprevisto para DKC01.1-030-3)
Conexión de potencia
Selección bloqueo deposicionamiento
y entradas para interfazmotor paso/paso
Tensión de mandoAsenso regulador
Paradaaccionamiento
Control temperatura motor
Conexión del motor
Conexión de feedback delmotor
SB0200D4.fh7
X1
X2
X3
X4
X5
S1H1
X6
X7
X8
X9
X5:Conector D-Sub de 15 polos (INS 439)
X7, X8, X9:Bornes roscados de acoplamiento
1 Schirm2 S33 S44 0V5 R16 R37 SCL8 SDO
9S110S2110V12R113R314FS15SDI
5678
1234
123
1234
L1L2L3
L+1L+2L-1L-2
A1A2A3
24V0V
TM+TM-
Mando freno de parada
Entrada analógica valor nominal 1234
E1E2
IRED1IRED2Reducción del par
Salidas analógicas5678
AK10V
AK2Schirm
123
24VRF
AH/Start
Salida valorefectivo deposición(incrementalo SSI)
9101112
UA0+UA0-UA1+/Data+UA1-/Data-
13141516
UA2+/CLK+UA2-/CLK-0VM
456
0VBbBb
1234
POS1/SM1+POS2/SM1-POS3/SM2+POS4/SM2-
5678
POS5POS Q1POS Q2POS Q3
9101112
POS Q4POS Q5
0VSchirm
Confirmaciónbloqueo de
posicionamiento
NFNSLIMIT+LIMIT-JOG+JOG-WSPINREFINBWGINPOS0VBlindaje
131415161718192021222324
Carrera en origenInterruptor origen
Microinterruptor de tope
Entradas desplazamientos por impulsos
Punto de cambio de recorridoen el punto de referenciaen movimientoen posición
Preparado para elfuncionamiento
123
RxDTxD
0V
456
RS 485+RS 485-Blindaje
Interfaz serialRS 232
X2
X1 X1
X3 X3
X4 X4
X5
X6 X6
X7
X8
X9
X2
1) No previsto para DKC11.1-040-7-FW
Pulsador de Óreset” anomalías
Visualización diagnosis
Br+Br-
Conexión para blindaje del cablede potencia del motor y del terminal
del conductor de protección
1)1)
X1, X2, X3, X4, X6:Bornes roscados de acoplamiento0,2...2,5 mm², AWG 24-12
Interfaz serialRS 485
Blindaje
BlindajeBlindaje
Fig. 4-12: Vista anterior del DKC con terminales

ECODRIVE DKC01.1/DKC11.1
4-10 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Esquemas generales de las conexiones

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-11
4
5
6
U1
V1
W1
X8
Conexión de tensiónpara freno de parada
RS485-
AP0200fh7
L1
L2L3
PE
Regulador DKC01.1 enmodalidad operativa interfazde POSICIONAMIENTO
X21
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
POS1
POS2
POS3
POS4
POS5
POS Q1
POS Q2
POS Q3
POS Q4
POS Q5
0V
1
2
3
4
5
6
7
8
Salidas analógicas
Feedrate Override
Reducción del par
X3
UA0
UA0
UA1/Data+
UA1/Data-
UA2/CLK+
UA2/CLK-
0V
E1
E2
IRED 1
IRED 2
AK1
0V
AK2
NF
NS
LIMIT+
LIMIT-
JOG+
JOG-
WSP
INREF
INBWG
INPOS
0V X7
A1
A2
A3
24V
M3
Frano de parada
X6
TM+
TM-
PTC
U
U1
V1
W1
1
2
3
4
ServomotorMKD
1
2
3
4
8
7
6
5
X54
2
9
3
10
12
14
7
15
8
1
0V
S3
S1
S4
S2
R1
FS
SCL
SDI
SDO
1
5
3
9
7
10
2
4
6
8
Cable preensambladoIKS 103
VT
BU
RD
BK
GY
PK
BN
GN
Feedbackresolver
1
2
+
X2
X1
WH 0,5 2
BN 0,5 2
X3
1
2
3
GN/YE
5
6
7
8
1
2
+
Señales deentrada de
posicionamiento
Confirmación delas señales de
entrada deposicionamiento
Carrera al punto dereferencia
Interruptor punto dereferencia
Final de carrera
Desplazamientos porimpulsos positivo
Desplazamientos porimpulsos negativo
Punto cambio de recorrido
en el punto de referencia
en movimientoen posición
Conexión circuito intermedio(no previsto para DKC01.1-030-3)
Conexión de potencia
0V
9
10
11
12
13
14
15
16
L1
L2
L3
1
2
3
X9
L+1
L+2
L-1
L-2
TxD
TxD
RxD
0V
RxD
RS485+
X1
RS485-
RS485+Bb
Bb
RF
+24V
X4
0 V
Interfaz serialRS 232
Tensión de mando para DKCAsenso regulador
Señal de puesta en marcha
Referencia cero para tensiónde mando
Preparado para elfuncionamiento
0V
AH/Star
1
2
3
4
5
6
1
2
3
Salida valor efectivode posición
(incremental o SSI)
INS 439
INS 448
TM+TM+
Br
Br
Símbolos: Borne roscado hembra de acoplamiento
Borne roscado macho de acoplamiento
Borne roscadoConector hembra de acoplamiento
Conector macho de acoplamiento
+
+
Interfaz serialRS 485
Cable preensambladoIKG 006
Fig. 4-13: DKC01.1 con interfaz de POSICIONAMIENTO

ECODRIVE DKC01.1/DKC11.1
4-12 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
4
5
6
U1
V1
W1
X8
RS485-
AP0204Fh7
L1
L2L3
PE
X21
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
0V
1
2
3
4
5
6
7
8
X3
UA0
UA0
UA1/Data+
UA1/Data-
UA2/CLK+
UA2/CLK-
0V
E1
E2
IRED 1
IRED 2
AK1
0V
AK2
NF
NS
LIMIT+
LIMIT-
WSP
0V X7
A1
A2
A3
24V
M3
X6
TM+
TM-
PTC
U
U1
V1
W1
1
2
3
4
1
2
3
4
8
7
6
5
X54
2
9
3
10
12
14
7
15
8
1
0V
S3
S1
S4
S2
R1
FS
SCL
SDI
SDO
1
5
3
9
7
10
2
4
6
8VT
BU
RD
BK
GY
PK
BN
GN
1
2
+
X2
X1
WH 0,5 2
BN 0,5 2
X3
1
2
3
GN/YE
5
6
7
8
1
2
+
0V
9
10
11
12
13
14
15
16
L1
L2
L3
1
2
3
X9
L+1
L+2
L-1
L-2
TxD
TxD
RxD
0V
RxD
RS485+
X1
RS485-
RS485+Bb
Bb
RF
+24V
X4
0 V 0V
AH/Start
1
2
3
4
5
6
1
2
3
INS 439
INS 448
TM+TM+
Br-
Br+
+
+
Regulador DKC01.1 enmodalidad operativa interfazde POSICIONAMIENTO
Salidas analógicas
Entrada analógicavalor nominal
Reducción del par
Carrera al punto dereferencia
Interruptor punto dereferencia
Final de carrera
Punto cambio de recorrido
Conexión de potencia
Tensión de mando para DKCAsenso regulador
Señal de puesta en marcha
Referencia cero para tensiónde mando
Preparado para elfuncionamiento
Salida valor efectivode posición
(incremental o SSI)
Conexión de tensiónpara freno de parada
Frano de parada
ServomotorMKD
Cable preensambladoIKS 103
Feedbackresolver
Conexión circuito intermedio(no previsto para DKC01.1-030-3)
Interfaz serialRS 232
Símbolos: Borne roscado hembra de acoplamiento
Borne roscado macho de acoplamiento
Borne roscadoConector hembra de acoplamiento
Conector macho de acoplamiento
Interfaz serialRS 485
Cable preensambladoIKG 006
Fig. 4-14: DKC01.1 con interfaz ANALÓGICA; destino de los terminales

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-13
4
5
6
U1
V1
W1
X8
RS485-
AP0205Fh7
L1
L2L3
PE
1
2
3
4
5
6
7
8
X3
UA0
UA0
UA1/Data+
UA1/Data-
UA2/CLK+
UA2/CLK-
0V
E1
E2
IRED 1
IRED 2
AK1
0V
AK2
X7
A1
A2
A3
24V
M3
X6
TM+
TM-
PTC
U
U1
V1
W1
1
2
3
4
1
2
3
4
8
7
6
5
X54
2
9
3
10
12
14
7
15
8
1
0V
S3
S1
S4
S2
R1
FS
SCL
SDI
SDO
1
5
3
9
7
10
2
4
6
8VT
BU
RD
BK
GY
PK
BN
GN
1
2
+
X2
X1
WH 0,5 2
BN 0,5 2
X3
1
2
3
GN/YE
5
6
7
8
1
2
+
0V
9
10
11
12
13
14
15
16
L1
L2
L3
1
2
3
X9
L+1
L+2
L-1
L-2
TxD
TxD
RxD
0V
RxD
RS485+
X1
RS485-
RS485+Bb
Bb
RF
+24V
X4
0 V 0V
AH/Star
1
2
3
4
5
6
1
2
3
INS 439
INS 448
TM+TM+
Br
Br
+
+
Regulador DKC01.1coninterfaz
ANALÓGICA
Salidas analógicas
Entrada analógicavalor nominal
Reducción del par
Conexión de potencia
Tensión de mando para DKCAsenso regulador
Señal de puesta en marcha
Referencia cero para tensiónde mando
Preparado para elfuncionamiento
Salida valor efectivode posición
(incremental o SSI)
Conexión de tensiónpara freno de parada
Frano de parada
ServomotorMKD
Cable preensambladoIKS 103
Feedbackresolver
Conexión circuito intermedio(no previsto para DKC01.1-030-3)
Interfaz serialRS 232
Símbolos: Borne roscado hembra de acoplamiento
Borne roscado macho de acoplamiento
Borne roscadoConector hembra de acoplamiento
Conector macho de acoplamiento
Interfaz serialRS 485
Cable preensambladoIKG 006
Fig. 4-15: DKC11.1-040-7-FW con interfaz ANALÓGICA

ECODRIVE DKC01.1/DKC11.1
4-14 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
4
5
6
U1
V1
W1
X8
RS485-
AP0203F5
L1
L2L3
PE
X21
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
SM1+
SM1
SM2+
SM2
0V
1
2
3
4
5
6
7
8
X3
UA0
UA0UA1/Data+
UA1/Data-UA2/CLK+
UA2/CLK-0V
E1
E2
IRED 1
IRED 2
AK1
0V
AK2
NF
NS
LIMIT+
LIMIT-
JOG+
JOG-
WSP
INREF
INBWG
INPOS
0V X7
A1
A2
A3
24V
M3
X6
TM+
TM-
PTC
U
U1
V1
W1
1
2
3
4
1
2
3
4
8
7
6
5
X54
2
9
3
10
12
14
7
15
8
1
0V
S3
S1
S4
S2
R1
FS
SCL
SDI
SDO
1
5
3
9
7
10
2
4
6
8VT
BU
RD
BK
GY
PK
BN
GN
1
2
+
X2
X1
WH 0,5 2
BN 0,5 2
X3
1
2
3
GN/YE
5
6
7
8
1
2
+
0V
9
10
11
12
13
14
15
16
L1
L2
L3
1
2
3
X9
L+1
L+2
L-1
L-2
TxD
TxD
RxD
0V
RxD
RS485+
X1
RS485-
RS485+Bb
Bb
RF
+24V
X4
0 V 0V
AH/Star
1
2
3
4
5
6
1
2
3
INS 439
INS 448
TM+TM+
Br
Br
+
+
Conexión de tensiónpara freno de parada
Regulador DKC01.1 enmodalidad operativa interfaz
MOTOR PASO/PASO
Salidas analógicas
Feedrate Override
Reducción del par
Frano de parada
ServomotorMKD
Cable preensambladoIKS 103
FeedbackresolverCarrera al punto de
referenciaInterruptor punto de
referencia
Final de carrera
Desplazamientos porimpulsos positivo
Desplazamientos porimpulsos negativo
Punto cambio de recorrido
en el punto de referencia
en movimientoen posición
Conexión circuito intermedio(no previsto para DKC01.1-030-3)
Conexión de potencia
Interfaz serialRS 232
Tensión de mando para DKCAsenso regulador
Señal de puesta en marcha
Referencia cero para tensiónde mando
Preparado para elfuncionamiento
Salida valor efectivode posición
(incremental o SSI)
Símbolos: Borne roscado hembra de acoplamiento
Borne roscado macho de acoplamiento
Borne roscadoConector hembra de acoplamiento
Conector macho de acoplamiento
Interfaz serialRS 485
Cable preensambladoIKG 006
Fig. 4-16: DKC01.1 con interfaz del MOTOR PASO/PASO

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-15
4.4 Conexión eléctrica al tablero de bornes
A continuación se describen las conexiones eléctricas primero por grupos,según los números del tablero de bornes (ej. X1, X2, etc.), ysucesivamente en base a sus funciones.
X1 - interfaz serialLa interfaz serial se utiliza, en general, para programar, definir valoresvariables, y efectuar el diagnostico a la hora de poner la máquina enfuncionamiento y en caso de operaciones de mantenimiento.
El terminal puede utilizarse para una interfaz RS 232 o bien RS 485.
La interfaz RS 232 es necesaria para programar, definir valores variables,y efectuar el diagnostico a la hora de poner la máquina en funcionamientoy en caso de operaciones de mantenimiento.
Además, sirve para programar las direcciones de accionamientonecesarias para el funcionamiento mediante la RS 485.
Con la interfaz RS 232 es posible definir los valores característicos de unsólo accionamiento a la vez, con la ayuda del programa de puesta enfuncionamiento DriveTop.
DKC
Cable: IKS 101
AP0224D4.fh7
TxD
RxD
GND
DTR
DSR
RTS
CTS
3
2
5
4
6
7
8
DKC
1) Conectar el blindaje externo lado PC a la masa del aparato
max. 15 m
1)
TxD
RxD
GND
DTR
DSR
RTS
CTS
2
3
7
20
6
4
5
max. 15 m
1)
TxD
RxD
0 V
2
1
3
6
5
4
X1
PC con conectorD-SUB de 9 polos
TxD
RxD
0 V
2
1
3
6
5
4
X1
Cable: IKS 102
PC con conectorD-SUB de 25 polos
Fig. 4-17: Conexión de un PC al DKC con la interfaz RS 232
Interfaz RS 232

ECODRIVE DKC01.1/DKC11.1
4-16 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
La interfaz RS 485 es necesaria para programar, definir valores variables,y efectuar el diagnostico a la hora de poner la máquina en funcionamientoy en caso de operaciones de mantenimiento.
La interfaz RS 485 permite:
• la realización de un bus serial con un máximo de 32 áreas de usuarioconectadas mediante una línea bifilar (semi-duplex);
• la transmisión hasta una distancia máxima de 1000 m.;
• velocidad de transmisión de 9600/19200 Baudios;
• la realización de una unidad central de visualización en PC.
Con la RS 485 es posible activar varios DKC con el programa DriveTopsin cambiar la conexión del cable de la interfaz.
AP0225D4.fh7
DKC
X1
6 5 4
PC
RS 232
RS 485
Impedancia terminal
120 Ohm / 0,6 W
X1
DKC
RS
485+
RS
485-
RS
485+
RS
485-
6 5 4
1) Último DKC de la serie con impedancia terminal
1)
Fig. 4-18: Conexión de un PC a varios DKC por medio de la interfaz RS 485
Interfaz RS 485

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-17
X2 - interfaz de posicionamiento o del motor paso/paso
Advertencia: No previsto para DKC11.1-040-FW.
Al terminal X2/(13-24) se conectan los cables de las entradas de mando yde las señalizaciones de estado necesarias tanto para la interfaz dePOSICIONAMIENTO, como para la interfaz del motor paso/paso.
La función se asigna al terminal X2/(1-12) cuando se definen los valoresvariables de la modalidad de funcionamiento durante la puesta enfuncionamiento:
• en presencia de la interfaz de POSICIONAMIENTO, se seleccionanlos bloqueos de posicionamiento;
• en presencia de la interfaz del motor paso/paso; por medio de estetablero de bornes las señales son transmitidas al controlador del motorpaso/paso.
Entradas de mando y señalizaciones de estado de la interfazde posicionamiento y del motor paso/paso
AP0223D4.fh7
13
14
15
16
17
18
19
20
21
22
23
24
NF
NS
LIMIT+
LIMIT-
JOG+
JOG-
WSP
INREF
INBWG
INPOS
0V
0,5 mm2
max. 20 m
0,5 mm2
HIGH
6 k 3 10 k
2 k 10 n
min.HIGH
LOW
Resistencia de entrada
0 Vext
Interruptor punto de referencia
Selección carrera en origenHIGH
X2
Entradas:
max.Tensión de entrada16 V
8 V
30 V
-0,5 V
ca. 8 kOhm
Fig. 4-19: Entradas para la carrera al punto de referencia
Entradas de mando para lacarrera al punto de referencia

ECODRIVE DKC01.1/DKC11.1
4-18 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
AP0222D4.fh7
0,5 mm2
max. 20 m
0,5 mm2
Desplazamiento por impulsos positivo
HIGH
0 Vext
Desplazamiento por impulsos negativo
13
14
15
16
17
18
19
20
21
22
23
24
NF
NS
LIMIT+
LIMIT-
JOG+
JOG-
WSP
INREF
INBWG
INPOS
0V
X2
6 k 3 10 k
2 k 10 n
min.HIGH
LOW
max.16 V
8 V
30 V
-0,5 V
ca. 8 kOhm
HIGH
Resistencia de entrada
Entradas:
Tensión de entrada
Fig. 4-20: Entradas para el desplazamiento por impulsos
AP0221D4.fh7
0,5 mm2
max. 20 m
0,5 mm2
HIGH
0 Vext
6k3 10k
2k 10n
min.HIGH
LOW
max.16 V
8 V
30 V
-0,5 V
ca. 8 kOhm
13
14
15
16
17
18
19
20
21
22
23
24
NF
NS
LIMIT+
LIMIT-
JOG+
JOG-
WSP
INREF
INBWG
INPOS
0V
X2
HIGH
Microinterruptor de tope positivo
Resistencia de entrada
Entradas:
Tensión de entrada
Microinterruptor de tope negativo
Fig. 4-21: Microinterruptor de tope
Entradas de mando para eldesplazamiento mediante
impulsos
Entradas de mando para lalimitación de la carrera

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-19
AP0220D4.fh7
Punto de cambio de
en el punto de referencia
0,5 mm2
max. 20 m
10 k1 n
24 V
0 Vext
en movimientoen posición
(Uext.)
min.HIGH
LOW
Corriente de salida
Salidas:
max.Tensión de salida16 V
1 V
U
0 V80 mA
ext.
out
Tiempo de subida/caída ca. µ5 s
Protección contra lassobrecargas
Con Iout > 300 mA. las salidasconmutan en LOW
13
14
15
16
17
18
19
20
21
22
23
24
NF
NS
LIMIT+
LIMIT-
JOG+
JOG-
WSP
INREF
INBWG
INPOS
0V
X2
Fig. 4-22: Señalizaciones de estado
Señalizaciones de estado

ECODRIVE DKC01.1/DKC11.1
4-20 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Interfaz de posicionamiento
AP0217D4
POS1
POS2
POS3
POS4
POS5
POS Q1
POS Q2
POS Q3
POS Q4
POS Q5
0V
max. 20 m
0,5 mm2
I/O
dig.
PLC
5V1 4k7 10k
2k 10n
0 Vext
1
2
3
4
5
6
7
8
9
10
11
12
X2
min.HIGH
LOW
max.16 V
8 V
30 V
-0,5 V
ca. 5 kOhm
10k1n
24 V
(Uext.)
min.HIGH
LOW
max.16 V
1 V
U
0 V80 mA
ext.
out
ca. 5 µs
+5 V
200
6k3 10k
2k 10n
POS1POS2POS3POS4
POS5
Corriente de salida
Salidas:Tensión de salida
Tiempo de subida/caída
Protección contra lassobrecargas
Con Iout > 300 mA. las salidasconmutan en LOW
Salidas:Tensión de salida
Resistencia de entrada
Fig. 4-23: Conexión de las señales de posicionamiento y de las salidas para suconfirmación
Señales de posicionamiento ysalidas para su confirmación

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-21
Advertencia: En presencia de una señal LOW en las entradas de POS1 a POS 4 de la Fig. 4-23, la tensión en dichas entradases de 5 Voltios. Esto puede determinar, en el caso queesté conectado con un PLC, la reacción de los LEDs decontrol de las salidas. Para impedir que esto se produzca,es necesario interponer un diodo de bloqueo tal como seaconseja en la Fig. 4-24.
SP0201D4.fh7
4k7 10k5V1Diodo de bloqueo
1N4148
+24 V
Salida PLCEntradas DKCTerminal: X2/1, X2/2; X2/3; X2/4
POS1...POS4
+5 V
2k 10n
200
Fig. 4-24: Conexión del diodo de bloqueo

ECODRIVE DKC01.1/DKC11.1
4-22 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Interfaz del motor paso/paso
SV0200D4.fh7
SM 1
SM 2
SM 1
SM 2
SM 2
SM 1
Rotación hacia la derechaRotación hacia la izquierdat1 t1
t2
t3tL
t2 ³ 5,6 µs
t3 ³ 5,6 µstL ³ 2,8 µs
t1 ³ 1,4 µs
1: Señales de cuadratura
Rotación hacia la derechaRotación hacia la izquierda
Rotación hacia la derechaRotación hacia la izquierda
2: Señales adelante/atrás
3: Señales de paso y de dirección
Fig. 4-25: Tipos de mando mediante la interfaz del motor paso/paso
• 1 lógico es reconocido en presencia de una diferencia positiva detensión de SM+ a SM-.
• 0 lógico es reconocido en presencia de una diferencia negativa detensión de SM+ a SM-.
• Para aumentar la seguridad contra las interferencias, el intervalo de ladiferencia debe ser por lo menos de 2,5 Voltios. La seguridad contra lainterferencias aumenta proporcionalmente al intervalo de la diferenciade tensión.
Tipos de mando mediante lainterfaz del motor paso/paso
Mando con señales diferenciales

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-23
AP0219D4.fh7
Controlador
0 Vext
Canal +
max. 20 m
0V
1
2
3
4
5
6
7
8
9
10
11
12
SM1+
SM1-
SM2+
SM2-
X2
min.
Frecuencia
Entradas:
max.Tensiones de entrada
0 V 30 V
max. 175 kHz
+
-
2k
4k
+15 V+5 V
+15 V+5 V
200
200
2k
2k 2k
50k
22p
SM+
SM-
Canal +
Canal -
Canal -
Fig. 4-26: Mando con señales diferenciales

ECODRIVE DKC01.1/DKC11.1
4-24 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
El dimensionamiento de las resistencias pull-up (resistencias 2k4 en laFig. 4-27) depende de la carga admitida (corriente, potencia disipadas) delas salidas open colector.
Advertencia: El mando de las interfaces de los motores paso/pasomediante señales diferenciales es más adecuado que elmando de un canal, en cuanto las señales diferencialesgarantizan, en general, una mayor seguridad contra lasinterferencias respecto a las señales referidas al cero.
AP0218D4.fh7
0 V
2k4
2k4
2k4
0V
1
2
3
4
5
6
7
8
9
10
11
12
SM1+
SM1-
SM2+
SM2-
X2
min.
Uext DC +24 V
max.0 V 30 V
max. 175 kHz
+
-
2k
4k
+15 V+5 V
+15 V+5 V
200
200
2k
2k 2k
50k
22p
SM+
SM-
Controlador
Frecuencia
Entradas:Tensiones de entrada
Fig. 4-27: Mando con salidas open colector
Mando de un canal mediante lassalidas open colector npn (NPN)

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-25
X3 - entradas y salidas analógicasAl terminal X3/(1-8) se conectan las entradas y las salidas para elfuncionamiento de la interfaz analógica:
• reducción del par;
• valor nominal indicado;
• salidas de diagnosis;
• función de override para el mando de posicionamiento.
El terminal X3/(9-16) facilita la posición efectiva o como valor incrementalemitido en paralelo, o como valor serial absoluto.
Interfaz analógica
AP0213D4.fh7
0,5 mm2
0,5 mm2
max. 20 m
CNC
0 Vext
E1
E2
IRED 1
IRED 2
AK1
0V
AK2
1
2
3
4
5
6
7
8
X3
20k
20k
20k
20k
ADC 12 bit-
+
min.Tensión de entrada entre E1-E2 entre E1-0VM; E2-0VM
Corriente de entrada: E1; E2
Entradas:
max.±10 V
0,5 mA
±10 V
±15 V±15 V
Resistencia de entrada ca. 20 kOhm
Deriva de entrada 18 µV/°C
Convertidor AD 12 bit
Resolución/bit 4,8 mV
Fig. 4-28: Entrada analógica del valor nominal
Entrada analógica deI valornominal para la regulación del
régimen o del par y para lafunción de override para la
regulación del régimen o del pary para la función de override

ECODRIVE DKC01.1/DKC11.1
4-26 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
E1
E2
IRED 1
IRED 2
AK1
0V
AK2
AP0214D4.fh7
0,5 mm2
0,5 mm2
max. 20 m
20k
20k
20k
20k
ADC 12-
+
0 Vext
+10V
0VM
1
2
3
4
5
6
7
8
min. max.
±10 V
0,5 mA
X3
±10 V
±15 V±15 V
ca. 20 kOhm
18 µV/°C
4,8 mV
bit
Tensión de entrada entre IRED1-IRED2 entre IRED1-0V; IRED2-0V
Corriente de entrada: E1; E2
Entradas:
Resistencia de entrada
Deriva de entrada
Convertidor AD 12 bit
Resolución/bit
Fig. 4-29: Conexión de la reducción analógica del par
AP0212D4.fh7
ej. osciloscopio
CH1 CH2
min.AK1-0V; AK2-0V
Salida:
max.Tensión de salida
-10 V +10 V
Convertidor AD 8 bit
Resolución/bit 78 mV
5
6
7
8
AK1
0V
AK2
X3
Fig. 4-30: Destino de los terminales de las salidas de diagnosis
Reducción del par
Salidas de diagnosis

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-27
360° eléctricos = un ciclo
t1
UA1
UA0
UA2
Impulsosrectangularesmirando el ejemotor y rotaciónen sentidohorario
SV0201D4.fh7t1 < 50 ns
t1
Fig. 4-31: Señales para la emisión del valor efectivo de posición incremental
AP0216D4.fh7
max. 40 m
CNC
Interfaz deposición
- incremental -
0 Vext
0,14 mm2
0V
UA2UA2
UA1
UA1
UA0
UA0
13
14
15
16
9
10
11
12
min.
HIGH
LOW
Corriente de salida
Salidas diferenciales RS422 compatibles:
max.Tensión de salida
2,5 V0,8 V0 V
out
Protección contra lassobrecargas
Las salidas no deben ser cortocircuitadas.¡Peligro de avería!
5 V
max. |20| mA
Frecuencia de salida max. 504 kHz
X3
Fig. 4-32: Emisión del valor efectivo de posición incremental
Valor efectivo de posición,incremental Valor efectivo de
posición,

ECODRIVE DKC01.1/DKC11.1
4-28 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
AP0201Fh7
+5V
Z0
Ua
Ua
X 3 C N C
RS-422DIN 66 259, Parte 3
Z0 = 120 Ω
Receptores de potencia diferencial aconsejadosAM 26 LS 32MC 3486SN 75 ALS 193SN 75 ALS 195
Fig. 4-33: Conexión aconsejada para la entrada
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
G23 G22 G21 G20 G19 G18 G17 G16 G15 G14 G13 G12 G11 G10 G9 G8 G7 G6 G5 G4 G3 G2 G1 G0
25
PFB 0 111
Tiempociclo
tm-T/2
T
Datos1 2
G23 G221
Tp
G23 G22 G0 PFB
tm
T
m
tv
SV0202D4.fh7
Resoluciones para 4096 rotaciones Resolución para 1 rotación
1 2 2524
Tp
Tiempociclo
Datos
G0 = bit más bajo en el código GrayG23 = bit más alto en el código Graym = información paralela memorizadaT = tiempo ciclo máx. 10 µs min. 1 µsTm = tiempo monoflop 25 µsTp = pausa tiempo ciclo 25 µstv = tiempo de retardo para el primer ciclo máx. 540 ns., para todos los demás máx. 360 ns.PFB = Power Failure Bit (no se utiliza y está siempre a nivel lógico LOW)
Fig. 4-34: Diagrama de los impulsos para la emisión del valor efectivo absolutode posición (formato SSI)
Conexión aconsejada para laentrada del mando en programa
Emisión del valor efectivo deposición en formato SSI

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-29
Data+
Data-
CLK+
CLK-
0V
AP0215D4.fh7
0,5 mm2
max. 20 m
CNC
0 Vext
X3
min.
HIGH
LOW
max.
2,5 V0,8 V0 V
out
5 V
max. |20| mA
min.
HIGH
LOW
Entradas diferenciales RS422 compatibles:
max.
2 V0,8 V0 V
Frecuencia (100-1000) kHz
5 V
12 kOhm
13
14
15
16
9
10
11
12Interfaz deposición
- incremental -
Corriente de salida
Salidas diferenciales RS422 compatibles:
Tensión de salida
Protección contra lassobrecargas
Las salidas no deben ser cortocircuitadas.¡Peligro de avería!
Frecuencia de salida
Tensión de entrada
Fig. 4-35: Emisión de los valores efectivos absolutos de posición en formato SSI
Valor efectivo absoluto deposición, en formato SSI

ECODRIVE DKC01.1/DKC11.1
4-30 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
X4 - conexiones del circuito de mando
AP0211D4.fh7
4
5
6Bb
Bb
RF
+24V
0 V
Preparado para elfuncionamiento
Asenso reguladorConexión tensión de mando para DKC
AH/Start
1
2
3Parada/puesta en marcha accionamiento
Referencia cero para tensión de mando
X4
6 k 3 10 k
2 k 10 n
min.HIGH
LOW
Resistencia de entrada
Entradas:
max.Tensión de entrada16 V
8 V
30 V
-0,5 V
ca. 8 kOhm
Fig. 4-36: Conexiones de las entradas de mando, de la tensión de mando, y delcontacto de “preparado para el funcionamiento”

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Reguladores ECODRIVE DKC 4-31
X5, X6, X7 - conexiones del motor
Para el destino de los terminales del motor se remite al esquema generalde conexiones en la Fig. 4-13.
Para más información ver el documento "ECODRIVE - servomotoresMKD" - Proyecto-.
X9 - conexiones del circuito intermedio
Advertencia: no previsto para DKC01.1-030-3-FW.
Terminal para la conexión de:
un módulo bleeder suplementario BZM01.1
- o bien -
un módulo condensador suplementario CZM01.1
- o bien -
un regulador DKC
La longitud máxima del cable es de 1,0 m. (cable torcido) con una secciónmínima de 2,5 mm.
2
.
AP0206D4.fh7
Conexión circuito intermediopara DKC 01.1-040-7-FWpara DKC 11.1-040-7-FW
L+1
L+2
L-1
L-2
1
2
3
4
Tensión del circuito intermedio entre L+ y L-: DC (de 500 a 800) Voltios
X9
Fig. 4-37: Conexión del circuito intermedio

ECODRIVE DKC01.1/DKC11.1
4-32 Reguladores ECODRIVE DKC DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Módulo bleeder suplementario BZM 5-1
5 Módulo bleeder suplementario BZM
5.1 Dimensionamiento de los componentes importantes parala energía de retorno
Para cualquier sistema compensado es necesario verificar que el bleeder(reostato de frenada) es capaz de absorber suficientemente la:
• potencia continua de retorno;
• potencia máxima de retorno;
• energía de retorno
producidas por el sistema.
Si la potencia y la energía de retorno producidas por el sistema mecánicosuperan la capacidad de absorción del bleeder del aparato, es posible enel caso del DKC**.*-040-7-FW aumentar dicha capacidad con lasconfiguraciones hardware descritas a continuación.
• Un regulador y un módulo bleeder suplementario conectadosmediante el circuito intermedio (1 DKC+BZM).
• Varios reguladores conectados mediante el circuito intermedio (hasta6 DKC).
• Varios reguladores y un módulo bleeder suplementario conectadosmediante el circuito intermedio (hasta 6 DKC+BZM).

ECODRIVE DKC01.1/DKC11.1
5-2 Módulo bleeder suplementario BZM DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
1. Potencia continua de retorno
3 3 35'
%''.& %'%=0
≤ +
3: :
W5'
527 327
=
=∑ ∑
:
- -
Q ]527
/$67
187= '(&
0
=+
⋅ ⋅⋅
⋅
π
: P J K ]327 /$67 $%
⋅ ⋅ ⋅
2. Potencia máxima de retorno
3 3 356
%0'.& %0%=0
≤ +
3
56
! YHUORVGDWRVGHVHOHFFLRQSDUDVHUYRDFFLRQDPLHQWRV
3. Energía de retorno (una frenada con PARADA DE EMERGENCIA)
: : : :3270$; 5270$; 0$;'.& 0$;%=0
≤
:0$;'.& ! YHUOD)LJ 'DWRV7p FQLFRVGHO'.&
:0$;%=0 ! YHUOD)LJ 'DWRV7p FQLFRVGHO%=0
PRD : Potencia continua de retorno de la mecánica durante elservicio continuo, expresada en kW.
PBD, DKC : Potencia continua de retorno que el regulador es capaz dedirigir durante el servicio continuo, expresada en kW.
PBD, BZM : Potencia continua de retorno que el módulo bleedersuplementario es capaz de dirigir durante el servicio continuo,expresada en kW.
PRS : Potencia máxima de retorno, expresada en kW.WROT : Energía giratoria en Ws.WPOT : Energía potencial en Ws.WROT, MAX : Energía giratoria máx. en caso de parada de emergencia,
expresada en Ws.WPOT, MAX : Energía potencial máx. en caso de parada de emergencia,
expresada en Ws.tZ : Tiempo ciclo en s.JLAST : Momento de inercia en carga en kgm.²JM : Momento de inercia del motor en kgm.²mLAST: Masa de carga en kg.WMAX, BZM : Energía acumulable en el BZM, expresada en kWs.WMAX, DKC : Energía acumulable en el DKC, expresada en kWs.g: Aceleración de gravedad, 9,81 ms.²h: Altura de descenso en m.nNUTZ : Régimen motor utilizado, expresado en min.-1
zAB: Número de descensos por ciclo.zDEC: Número de frenados por ciclo.
Fig. 5-1: Verificación de las condiciones para la potencia y la energía deretorno con un DKC con BZM conectados mediante el circuitointermedio
1 DKC + BZM

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Módulo bleeder suplementario BZM 5-3
1. Potencia continua de retorno
3 35'
%''.&
∑ ∑≤
3: :
W5'
]
527 327=
∑ ∑
:
- -
Q ]527
/$67
187= '(&
0
=+
⋅ ⋅⋅
⋅
π
: P J K ]327 /$67 $%
⋅ ⋅ ⋅
2. Potencia máxima de retorno
3 356
%0'.&
∑ ≤
3
56
! YHUORVGDWRVGHVHOHFFLRQSDUDVHUYRDFFLRQDPLHQWRV
3. Energía de retorno (una frenada con PARADA DE EMERGENCIA
: : :3270$; 5270$; 0$;'.&
∑ ∑ ∑≤
:0$;'.& ! YHUOD)LJ 'DWRV7p FQLFRVGHO'.&
PRD : Potencia continua de retorno de la mecánica durante elservicio continuo, expresada en kW.
PBD, DKC : Potencia continua de retorno que el regulador es capaz dedirigir durante el servicio continuo, expresada en kW.
PRS : Potencia máxima de retorno en kW.WROT : Energía giratoria en Ws.WPOT : Energía potencial en Ws.WROT, MAX : Energía giratoria máx. en caso de parada de emergencia,
expresada en Ws.WPOT, MAX : Energía potencial máx. en caso de parada de emergencia,
expresada en Ws.tZ : Tiempo ciclo en s.JLAST : Momento de inercia en carga en kgm.²JM : Momento de inercia del motor en kgm.²mLAST: Masa de carga en kg.WMAX, BZM : Energía acumulable en el BZM, expresada en kWs.WMAX, DKC : Energía acumulable en el DKC, expresada en kWs.g: 9,81 ms.²h: Altura de descenso en m. o en maniobras de frenadonNUTZ : Régimen motor utilizado, expresado en min.-1
zAB: Número de descensos por ciclozDEC: Número de frenados por ciclo
Fig. 5-2: Verificaciones de las condiciones para la potencia y la energía deretorno con varios DKC conectados mediante el circuito intermedio
sino a 6 DKC

ECODRIVE DKC01.1/DKC11.1
5-4 Módulo bleeder suplementario BZM DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
1. Potencia continua de retorno
3 3 35'
%''.& %'%=0
∑ ∑ ∑≤ +
3: :
W5'
527 327
=
=∑ ∑
:
- -
Q ]527
/$67
187= '(&
0
=+
⋅ ⋅⋅
⋅
π
: P J K ]327 /$67 $%
⋅ ⋅ ⋅
2. Potencia máxima de retorno
3 3 356
%0'.& %0%=0
∑ ≤ +
3
56
! YHUORVGDWRVGHVHOHFFLRQSDUDVHURDFFLRQDPLHQWRV
3. Energía de retorno (una frenada con PARADA DEEMERGENCIA)
: : : :3270$; 5270$; 0$;'.& 0$;%=0
∑ ∑ ∑ ∑≤
:0$;'.& ! YHUOD)LJ 'DWRV7p FQLFRVGHO'.&
:0$;%=0 ! YHUOD)LJ 'DWRV7p FQLFRVGHO%=0
PRD : Potencia continua de retorno de la mecánica durante elservicio continuo, expresada en kW.
PBD, DKC : Potencia continua de retorno que el regulador es capaz dedirigir durante el servicio continuo, expresada en kW.
PRS : Potencia máxima de retorno en kW.WROT : Energía giratoria en Ws.WPOT : Energía potencial en Ws.WROT, MAX : Energía giratoria máx. en caso de parada de emergencia,
expresada en Ws.WPOT, MAX : Energía potencial máx. en caso de parada de emergencia,
expresada en WstZ : Tiempo ciclo en s.JLAST : Momento de inercia en carga en kgm.²JM : Momento de inercia del motor en kgm.²mLAST: Masa de carga en kg.WMAX, BZM : Energía acumulable en el BZM, expresada en kWs.WMAX, DKC : Energía acumulable en el DKC, expresada en kWsg: 9,81 ms.².h: Altura de descenso en m. o en maniobras de frenadonNUTZ : Régimen motor utilizado, expresado en min.-1
zAB: Número de descensos por ciclozDEC: Número de frenados por ciclo
Fig. 5-3: Verificación de las condiciones para la potencia y la energía de retornocon varios DKC y un BZM conectados mediante el circuito intermedio
hasta 6 DKC + BZM

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Módulo bleeder suplementario BZM 5-5
5.2 Diseño acotado y dimensiones máximas
ECODRIVE
DIGITALAC-SERVOBLEEDER
109-
0963
-390
1-01
X9L+1L+2L-1L-2
X4
H1H2
S1RESET
MB0200D4
min. 80 mm
210
1333
3
343
360
8
32,5
65
70Distancia ejes entre los aparatos
14
7
7
233
min. 80 mm
Fig. 5-4: Dimensiones del módulo bleeder suplementario BZM01.1
5.3 Datos técnicos
SímboloDenominaciónUnidad de
medidaPotencia continua del bleeder(potencia continua de retornoen caso de frenado en lossistemas de accionamiento)
1PBD,BZM kW
Valor
Potencia máxima del bleeder(potencia máxima de retorno)
40(ciclo 1 s. activ., 40 s. no activ.)
PBM,BZM kW
Energía máx. de retorno 40WMAX,BZM kWs
Tensión de mando entreX4/1 y X4/4
DC 24 ±20%UN,BZM V
Corriente absorbida por laconexión 24 Voltios
90IN,BZM mA
TB0205D
Fig. 5-5: Datos técnicos del BZM

ECODRIVE DKC01.1/DKC11.1
5-6 Módulo bleeder suplementario BZM DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
5.4 Vista anterior
Conexión circuito intermedio
Tensión de mando
FA0202D4.fh7
1234
123
frei+24 V
frei
X4
X9
ECODRIVE
DIGITALAC-SERVOBLEEDER
109-
0963
-390
1-01
X9L+1L+2L-1L-2
X4
H1H2
S1RESET
456
0VBbBb Preparado para el funcionamiento
X4
H1 = LED verde • Luz fija: funcionamiento normal del bleeder suplementario • Luz intermitente: tensión del circuito intermedio < 50 Voltios
H2 = LED rojo • Luz intermitente: bleeder suplementario sobrecargado; el contacto Bb se abre
S1 = pulsador de Óreset”
X4: borne roscado de acoplamiento de 0,2 a 2,5 mm2, AWG 24-12, rígido o flexible, flexible con o sin casquillos terminales
X9: borne roscado de acoplamiento de 0,2 a 4 mm2², AWG 24-10, rígido o flexible
+
+
Fig. 5-6: Vista anterior del módulo bleeder suplementario BZM01.1 conterminales
5.5 Conexión eléctrica
SB0201.fh7
BZM01.1X4
1
2
3
4
5
6
+24 V
0 V
Bb
DC 24 V ± 20%
Preparado para elfuncionamiento
DKC**.*-040-7-FW
máx. 1 m.,torsión, máx. 4 mm2²
Conexión circuitointermedio
libre
L+1
L+2
L-1
L-2 X9 L+1
L+2
L-1
L-2
max. DC 24 V/1 A
++ ++
X9
Conexión tensiónde mando
libre
Fig. 5-7: Destino de los terminales del módulo bleeder suplementario BZM01.1

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Módulo bleeder suplementario BZM 5-7
5.6 Código de identificación y placa
BZM 01.1 - 01 - 07
Tensión nominal circuito intermedio700 V
Potencia nominal1,0 kW
Versión
Serie
Módulo bleeder suplementario
TL0203D4.fh7
BZM
01
1
01
07
Elementos del código: Ejemplo:
Fig. 5-8: Código de identificación
TS0202D4.fh7
BZM01.1-01-07260066
SN260067-00314
K21/96
B04
Semana de producción
Número de serie Índice de modificación
Código de barras
Tipo di aparato
Número material
Fig. 5-9: Placa

ECODRIVE DKC01.1/DKC11.1
5-8 Módulo bleeder suplementario BZM DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Módulo condensador suplementario CZM 6-1
6 Módulo condensador suplementario CZM
6.1 Dimensionamiento
Advertencia: Utilizable sólo para el DKC01.1-040-7-FW y el DKC11.1-040-7-FW.
Cuando se frena el accionamiento la energía giratoria de la mecánica selibera bajo forma de energía de retorno en el circuito intermedio del DKC.Dicha energía puede:
• ser eliminada por el bleeder integrado en el DKC o por el bleedersuplementario bajo forma de calor disipado
- o bien -
• ser acumulada bajo forma de energía en el DKC conectado a unmódulo condensador suplementario y ser reutilizada por los ciclos deaceleración sucesivos. De esta forma se reduce la potencia disipadadel armario eléctrico y el consumo de energía.
Para obtener resultados positivos, evitando al mismo tiempo disipacionesinútiles en el armario eléctrico, es válido cuanto sigue:
: :527 =:'.&&=0
≤
Fig. 6-1: Condiciones para evitar disipaciones derivadas de la energía deretorno
:
- -
Q527
/$67
187=
0
=+
⋅ ⋅⋅
π
WROT : Energía giratoria de la aplicación en Ws.nNUTZ : Régimen útil máx. en min.-1
JLAST : Momento de inercia a cargo de la aplicación en kgm.²JM : Momento de inercia del motor
Fig. 6-2: Cálculo de la energía giratoria
:& &
8 8=:'.&&=0
'.& &=0
%
=:
= + ⋅ ⋅ −
WZW, DKC+CZM: Energía acumulable en el DKC con CZM en Ws.CCZM : Capacidad del CZM en mF., (valor = 1,0 mF.)CDKC : Capacidad del circuito intermedio del DKC en mF., (valore = 0,15
mF.)UB : Umbral de respuesta del bleeder del DKC en Voltios (valor = 820)UZW: Tensión nominal (circuito intermedio) en Voltios (UZW = √2 • 0,98 UN)UN: Tensión de red (valor efectivo) en Voltios
Fig. 6-3: Calculo de la energía acumulable con CZM01.1
Cálculo de la energía giratoriade la aplicación
Energía acumulable en el DKCcon CZM01.1 conectado

ECODRIVE DKC01.1/DKC11.1
6-2 Módulo condensador suplementario CZM DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
DKC01.1-40-7 con servomotor MKD 071 B con los siguientes datos:
Denominación Valor
Momento de inercia del rotor del MKD 071B
JM = 0,00087 kgm.²
Régimen útil máx. del motor nNUTZ = 3200 min.-1
Momento de inercia en carga de laaplicación
JLAST = 0,00261 kgm.²
Tiempo ciclo tZ =0,8 s.
Tensión de red UN = 400 Voltios
Fig. 6-4: Datos técnicos del ejemplo de aplicación DKC01.1 con MKD
tz
t1 t2 t3
nP
R
WROT
PRD =WROT
tzDG0202D4.fh7
t
t1 = tiempo de aceleración en s.t2 = tiempo de retardo en s.t3 = tiempo de parada en s.tZ = tiempo ciclo en s.WROT = energía rotatoria en Ws.n = régimen en min.-1
PRS = potencia máxima de retorno en kW.PRD = valor medio de la potencia de retorno
de un ciclo en W. (potencia continua de retorno)
Fig. 6-5: Cálculo de la potencia de retorno durante el ciclo de trabajo
resulta:
WROT = 195 Ws.
WZW, DKC+CZM = 209 Ws.
Por lo tanto se cumple la condición WROT ≤ WZW, DKC+CZM. Si la mismaenergía fuese eliminada por el bleeder, del tiempo ciclo se obtendría unapotencia continua de retorno de 243 Watios, que se traduciría en potenciadisipada en el armario eléctrico.
Ejemplo de aplicación

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Módulo condensador suplementario CZM 6-3
6.2 Diseño acotado y dimensiones máximas
ECODRIVE
DIGITALAC-SERVOCAPACITOR
109-
0963
-390
1-01
X9L+1L+2L-1L-2
MB0203D4.fh7
min. 80 mm
210
1333
3
343
360
8
32,5
65
70
14
7
7
233
min. 80 mm
Distancia ejes entre los aparatos
Fig. 6-6: Dimensiones del módulo condensador suplementario CZM01.1

ECODRIVE DKC01.1/DKC11.1
6-4 Módulo condensador suplementario CZM DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
6.3 Vista anterior
Conexión circuito intermedio
FA0203D4.fh7
X9: borne roscado de acoplamiento de 0,2 a 4 mm.², AWG 24-10
1234
X9
ECODRIVE
DIGITALAC-SERVOCAPACITOR
109-
0963
-390
1-01
X9L+1L+2L-1L-2
+
+
Fig. 6-7: Vista anterior del módulo condensador suplementario CZM01.1
6.4 Conexión eléctrica
SB0202Fh7
CZM01.1 DKC01.1-040-7-FWDKC11.1-040-7-FW
L+1
L+2
L-1
L-2
X9
máx. 1 m.,torsión, 2,5 mm2
L+1
L+2
L-1
L-2
X9
Conexión circuitointermedio
++ ++
Fig. 6-8: Conexión del módulo condensador suplementario CZM01.1

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Módulo condensador suplementario CZM 6-5
6.5 Código de identificación y placa
CZM 01.1 - 01 - 07
700 V
1,0 mF
TL0204D4.fh7
CZM
01
1
01
07Tensión nominal circuito intermedio
Capacidad nominal
Versión
Serie
Módulo condensador suplementario
Elementos del código: Ejemplo:
Fig. 6-9: Código de identificación
TS0203D4.fh7
CZM01.1-01-07260068
SN260100-01061
K21/96
A01
Semana de producción
Número de serie Índice de modificación
Código de barras
Tipo di aparato
Número material
Fig. 6-10: Placa

ECODRIVE DKC01.1/DKC11.1
6-6 Módulo condensador suplementario CZM DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Grupos de red DC24V NTM 7-1
7 Grupos de red DC24V NTM
7.1 Recomendaciones para su utilización
Si no se dispone de una tensión de mando externa DC24V, INDRAMATaconseja el empleo de grupos de red NTM.
• Los grupos de red constan de protección contra las sobrecargas detensión, con dispositivo automático de desactivación. Después de laintervención del dispositivo automático, es posible volver a lasregulares condiciones de funcionamiento, desactivándolo por un breveperiodo de tiempo, y volviendo a accionar los grupos de red.
• En general, la corriente de activación de los grupos de red es limitada.Aún así, si se desactiva y se vuelve a activar el grupo en una arco detiempo de 10 s., la limitación de la corriente de entrada puede nofuncionar.
• Los grupos de red NTM01.1-024-004 y NTM01.1-024-006 permitenmedir, mediante la líneas de los sensores, la tensión aplicada sobre lacarga. En caso de caída de tensión, el grupo de red aumenta porconsecuencia la tensión de salida.
Para los grupos de red DC24V NTM, INDRAMAT aconseja el empleo de uninterruptor automático de 10 A. con característica de resorte C.
Para suprimir radiointerferencias utilizar el filtro de red NFE01.1-250-006.
7.2 Datos técnicos
NTM01.1-024-002
2,1
50
0,61 (1,2)
32 (16)
NTM01.1-024-004
3,8
100
1,2 (2,2)
32 (16)
NTM01.1-024-006
5,5
150
1,9 (3,2)
32 (16)
Potencia de salidaa la temperatura ambiente de 45 °C
lEIN:
Estándar: AC de 170 a 265Cambiando un puente de conexión: AC de 85 a 132
Símbolo
POUT
Denominación
Corriente nominal de la salida 24 Voltiosa temperatura ambiente de 45 °C
Corriente de entrada con 230 (115) Voltios
Corriente de conexión con 230 (115)Voltios en la línea de alimentación dered a la inserción. Por lo tantodimensionar al inicio el dispositivo deprotección.
Unidad demedida
V
IN A
UNTensión de entrada V
IIN A
A
NFE01.1-250-006(filtro supresor de radiointerferencias aconsejado para respetar
los valores límite de compatibilidad electromagnética)
Filtro supresor de radiointerferencias
TB0201D4
Fig. 7-1: Datos técnicos de los grupos de red DC24V NTM
Características
Protección Q2
Eliminación deradiointeferencias

ECODRIVE DKC01.1/DKC11.1
7-2 Grupos de red DC24V NTM DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
7.3 Diseños acotados y dimensiones máximas
MB0204D4.fh7
21,9
Grupo de redNTM01.1-024-..
32,1
30,4
B
CA1A
D
Tipo grupo de redINDRAMAT
NTM01.1-024-002NTM01.1-024-004NTM01.1-024-006
A
173202212
A1
168,7197,7207,7
B
1009797
C
455170
D
172020
A Bloqueo de conexión
B Barra colectora DIN 50
Cuadro de las dimensiones
AB
C
C
C > 20 mm.distancia para ventilación
Fig. 7-2: Diseño acotado de los grupos de red DC24V NTM
7.4 Vistas anteriores
FA0201D4.fh7
LED verde = tensión desalida presente
Potenciómetro para laregulación fina de la tensiónde salida
Pin para la conmutación dela tensión de entrada 1)
L
N
1) Pin no conectados = tensión de entrada AC (200-240) Voltios Pin conectados tensión de entrada AC (100-120) Voltios
Tensión deentrada
1)
DC 24 V V+Referencia
cero V.-
Tensiónde salida
Tierra FG
Fig. 7-3: Vista anterior y denominación de los terminales del grupo de redNTM01.1-024-002

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Grupos de red DC24V NTM 7-3
FA0200D4.fh7
V+
V-
FG
L
N
Entrada sensor S+ 2)
A
B
Regulación de latensión de entradamediante puente deconexión 1)
1) A/B no conectados, tensión de entrada AC (170-265) Voltios A/B conectados mediante puente de conexión, tensión de entrada AC (85-132) Voltios2) V+/S+ e V-/S- están conectados mediante puente de conexión. Remover los puentes sólo en caso de utilización de las entradas de los sensores
1)
LED verde = tensión desalida presente
Potenciómetro para laregulación fina de la tensiónde salida
Tensión deentrada
DC 24 V V+Referencia
cero V.-
Tensiónde salida
Tierra Entrada sensor S- 2)
Fig. 7-4: Vista anterior y denominación de los terminales de los grupos de redNTM01.1-024-004, NTM01.1-024-006
7.5 Conexión eléctrica
Para regla general, utilizar los grupos de red NTM con el filtro de redNFE01.1-230-006.
AP0202D4.fh7
NFE01.1-230-006
L
N NTM ...
L
N
+DC 24 VP
N
E
P'
N'
V+
V- 0 V
Grupo de redFiltro supresor de radiointerferencias
PE
Fig. 7-5: Conexión del grupo de red equipado con filtro de red
Advertencia: Si se utilizan las entradas de los sensores, remover lospuentes de conexión V+/S+ y V-/S-.
Advertencia: El terminal 0 V, en el lado secundario de los grupos dered de 24 Voltios, debe estar siempre conectado con elpunto central de referencia de masa en el armarioeléctrico (ver Cap. 8.3).

ECODRIVE DKC01.1/DKC11.1
7-4 Grupos de red DC24V NTM DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
AP0227D4.fh7
NTM
Entrada DC 24 Voltios
V+
V-
S+
S-
Carga
Retorcer el cabledel sensor
Grupo de red
Fig. 7-6: Conexión de los cables de los sensores para NTM01.1-024-004 yNTM01.1-024-006
7.6 Código de identificación
NTM 01.1 - 024 - 02
Corriente nominal de salida2,1 A4,2 A6,3 A
Tensión nominal de salidaDC 24 V
Versión
Serie
Grupo de red
TL0205D4.fh7
NTM
01
1
024
020406
Elementos del código: Ejemplo:
Fig. 7-7: Código de identificación

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Filtros de red NFD / NFE 8-1
8 Filtros de red NFD / NFE
8.1 Selección
Los filtros indicados a continuación están destinados a la conexión depotencia de los reguladores DKC.
Para los datos del filtro de supresión de radiointerferencias para el grupode red DC24V NTM ver el capítulo 8.4.
Tensiónmáxima de la
redde 50 a 60 Hz.
UN
Corrientenominalde red
INetz
(1)
Númerode lasfases
Tipo de filtro
(grado deprotección
IP10)
Terminales Cable deconexión
Potenciadisipadaaprox.
Peso
en V. en A. mm.2 AWG mm.2 AWG en W. en kg.
AC 480 V. +10% 7,5 3 NFD 02.1-460-008
6 AWG 10 ----- ----- 8,7 1,5
AC 480 V. +10% 16 3 NFD 02.1-480-016
6 AWG 10 1,34 16 9 1,7
AC 480 V. +10% 30 3 NFD 02.1-480-030
10 AWG 6 5,37 10 14 1,8
AC 480 V. +10% 55 3 NFD 02.1-480-055
10 AWG 6 6 13,5 20 3,1
AC 480 V. +10% 75 3 NFD 02.1-480-075
25 AWG 3 ----- ----- 20 4
AC 480 V. +10% 130 3 NFD 02.1-480-130
50 AWG 1/0 ----- ----- 40 7,5
AC 480 V. +10% 180 3 NFD 02.1-480-180
95 AWG 4/0 ----- ----- 61 11
AC 230 V. +10% 7,5 1 NFE 02.1-230-008
6 AWG 10 ----- ----- 7,2 1,1
(1) = corriente permanente máxima de red con una temperatura ambiente de 45 °C
Fig. 8-1: Datos técnicos de los filtros di red disponibles
Frecuencia defuncionamiento
de DC a 60 Hz. a 40 °C
Potencia disipada medida 2 ó 3 x R I2
Nenn DC
Temperatura de -25 a + 85 °C
Sobrecarga 1,5 INenn 1 min./hora
Saturación Con corriente nominal de 2,5 - 3 veces superiorreducción de 6 dB
Tensión de prueba L/N -> PE y L -> PE: 2800 VDC 2 s a 25 °C
L -> PE y L -> L: 2125 VDC 2 s a 25 °C
Reducción decorriente consobrecarga detemperatura
, , = −1
( Θ)
Grado de protección IP 10
Fig. 8-2: Condiciones ambientales y de funcionamiento
Datos técnicos

ECODRIVE DKC01.1/DKC11.1
8-2 Filtros de red NFD / NFE DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
8.2 Diseño acotado y dimensiones máximas
NFD 02.1-480-075NFD 02.1-480-130
NFD 02.1-480-016NFD 02.1-480-030NFD 02.1-480-055
Line
NFD 02. 1 - 480 ...-16
NFE 02.1-230-008NFD 02.1-480-008
ABCDEFGHJKLMO
-21015
0,75604010409060805,3-
305142±0,8
55275±0,8
290306,5300
1+0,1-9-
M5
...-030
335150±1
60305320356,5400
1+0,1-9-
M5
...-055
329185±1
80300314556,55001,5-
12-
M6
...-075
32922080
300314556,5-
1,5---
M6
...-130
429±1,5240
110±0,8400±1,2
414806,5-
1,5---
M10
...-180
438±1,5240
110±0,8400±1,2
414506,5500
2-
15-
M10
Tolerancia
±1±1,5±0,6±1
±0,5±0,3±0,2±15±0,2
-±1-- M01XXX1P.fh5
NFD 02.1-480-180
Cota
F
G
HD
J
LM
B
K
CE
LHL
Load
NFE 02.1-230-008NFD 02.1-480-008
Fig. 8-3: Diseño acotado y dimensiones máximas de los filtros de redNFD, NFE

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Filtros de red NFD / NFE 8-3
El filtro se debe montar preferentemente en la chapa de montaje o en elarmario eléctrico en el que está alojado el DKC.
PELIGRO
¡Componentes sometidos a tensión (superior a los50 Voltios)!¡Descarga eléctrica en caso de contacto!⇒ Antes de la puesta en funcionamiento es obligatorio
realizar la conexión fija con la tierra del conductor deprotección al filtro, y a la puesta a tierra de esteúltimo.
⇒ ¡Antes de manipular cables de conexión y terminalesno aislados, desconectar de la red o interrumpir laalimentación del filtro y de los servicios conectados.Posteriormente esperar el tiempo necesario paraque se descargue la tensión residual. Solamentedespués se podrán realizar los trabajos en el cablede conexión o en el filtro.
⇒ A causa del elevado valor de la corriente dispersadel filtro, se prohibe hacer funcionar a este último sinhaber antes accionado el conductor de protección
⇒ Por lo tanto, el funcionamiento del filtro se admiteexclusivamente si ha sido enlazado un conductor deprotección que tenga una sección de ³10 mm.2.
⇒ Remover la pintura presente en los puntos demontaje del filtro.
⇒ Utilizar tornillos galvanizados o de estaño conarandela dentada plana.
8.3 Conexión eléctrica
Para el montaje y la instalación de los filtros de red seguir lasrecomendaciones del documento:
"Compatibilidad electromagnética de sistemas de accionamiento y demando "
- Proyecto -.
AP0240D4.fh7
Q10
Q2
NTM
Q1
K1
L1N
PE
Punto de masacentral en elarmarioeléctrico
1 x AC 230 V+10% -15%
(50-60 Hz)
Q1: protección alimentación de potenciaQ10: interruptor generalQ2: protección tensión de mandoK1: Contactor general
Filtro de red NFE
1) La utilización de grupos de red (NTM) temporizados requiere antes la aplicación de un filtro de red NFE 01.1-230-006.
2) Instalar preferentemente en la plancha de montaje del DKC.
Conexión tensión demando para DKC X4
Enlace a la redX8
=
LINE
LOAD
L1NPE
L1'N'
PE'
Filtro di redNFE01.1
Conexióna tierra X8
V+ V-
N L
1)
2)
Fig. 8-4: Conexión monofásica del filtro de red NFE02.1-230-008
Advertencias para el montaje

ECODRIVE DKC01.1/DKC11.1
8-4 Filtros de red NFD / NFE DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
AP0241D4.fh7
Q10
L1L2L3
PE
3 x AC(50-60 Hz)
Q2Q1
K1
LINE
LOAD
2)
NTM
L1L2L3E
L1'L2'L3'E'
1)=
V+ V-
N L
3)
Punto de masacentral
Q1: protección alimentación de potenciaQ10: interruptor generalQ2: protección tensión de mandoK1: Contactor general
Filtro de red NFE
1) La utilización de grupos de red (NTM) temporizados requiere antes la aplicación de un filtro de red NFE 01.1-230-006.2) Tensión enlazada AC 230 Voltios (+10% -15%) (50-60 Hz.)3) Instalar preferentemente en la plancha de montaje del DKC.
Conexión tensión demando para DKC X4
Enlace a la redX8
Filtro di redNFE01.1
Conexióna tierra X8
Fig. 8-5: Conexión trifásica del filtro de red NFD01.1 o bien NFD02.1
8.4 Filtros de red para grupos de red DC24V NTM
En caso de empleo del grupo de red NTM, utilizar el filtro de redNFE01.1-250-006 para suprimir las radiointerferencias.
MB0206D4
44
43,2
21
54
12,4
11,2
32,2
R5
ø5,1
15
9
0,4
19
15
Fig. 8-6: Diseño acotado del filtro de red NFE01.1-250-006
AP0228D4.fh7
NFE01.1-250-006P
N
P'
N'
E
L1
N
PE
Lado red Lado aparato
Fig. 8-7: Destino de los terminales del filtro de red NFE01.1-250-006

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Filtros de red NFD / NFE 8-5
Para la conexión del filtro de red se deben utilizar conectores hembraplanos 6.3-1 a norma DIN 462 545.
8.5 Código de identificación
NFE 01.1 - 230 - 008
Corriente homologada en A.
Tensión nominal en V. (de fase a fase)230
Versión
Serie
Filtro de red1 fase3 fase
TL0206D4.fh7
NFENFD
01
1
230
008
Elementos del código: Ejemplo:
Fig. 8-8: Código de identificación

ECODRIVE DKC01.1/DKC11.1
8-6 Filtros de red NFD / NFE DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Transformadores DST / DLT 9-1
9 Transformadores DST / DLT
9.1 Selección
La utilización de transformadores sólo es necesaria si la tensión de red noestá dentro de los límites de tensión nominal admitidos del aparato DKC.
Para adaptar la tensión de red a la tensión nominal del aparato, en casode red conectada a tierra, es necesario el uso de autotransformadores:
• para el DKC**.*-040-7-FW/DKC11.1-040-7-FW: autotransformadoresaptos a un campo de tensión de salida ;
• para el DKC**.*-030-3-FW: autotransformadores dimensionados parauna tensión de salida .
Para adaptar la tensión en caso de red no conectada a tierra esnecesario, generalmente, el empleo de transformadores de separación,para evitar sobrecargas de tensión entre el conductor externo y la tierra.
• para el DKC**.*-040-7-FW este documento no ofrece una gama deproductos entre los cuales seleccionar los transformadores deseparación adecuados (en caso de necesidad solicitar ladocumentación);
• para el DKC**.*-030-3-FW la selección del transformador deseparación se puede realizar según lo indicado en la Fig. 9-4.
9.2 Autotransformadores para DKC**.*-040-7-FW
Seleccionar el autotransformador en función de la tensión de red y de lanecesidad de potencia de la instalación.
Para realizar la selección se procede como sigue:
⇒ En función del campo de tensión nominal de red necesario indicado enel diagrama de la Fig. 9-1, determinar el grupo de clasificación yobtener la correspondiente relación de transformación "i".
⇒ Calcular la tensión efectiva de salida del transformador utilizando latensión nominal de red indicada, y de la relación de transformación "i".
⇒ Verificar los datos del accionamiento. La tensión de salida deltransformador influencia los datos del accionamiento; ver eldocumento "ECODRIVE - sistemas de servoaccionamiento DKC conMKD"- Datos de selección -.
⇒ Escoger el autotransformador trifásico, en función de la potenciaconectada solicitada.
Redes a tierra
Redes no a tierra

ECODRIVE DKC01.1/DKC11.1
9-2 Transformadores DST / DLT DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
0
380
460
200DG0203D4.fh7 Tensión de entrada del transformador en V.
Ten
sión
de
salid
a de
l tra
nsfo
rmad
or e
n V
.
480
i = 1,26 i = 1,50
240220 500 520 540 560 580 600 620 640 660 680
i = 0,52
700
i = 1,08
AC(200...240)V AC(480...500)V
AC(480...580)V
AC(570...690)V
DST**/*/240-460 DST**/*/500-460
DST**/*/580-460
DST**/*/690-460
Fig. 9-1: Clasificación en grupos de los autotransformadores trifásicos

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Transformadores DST / DLT 9-3
MB0207D4.fh7
Autotransformadores DST con tensión secundaria o de salida de CA (de 380 a 460) Voltios
U2
U1N
V2
V1
W2
W1
a
b
1) Interruptor térmico carga máx.: DC 24V/1A; AC 230V/1A
1)
GC
EF
A
HÆ
B
GmbH D 97816 Lohr a. M.
TypePrim.
Sec.
S
DST 20/S/580 - 480480 580 V
380 460 V 30 25 A
20 kVA YNa0
4/S/240-460
7,5/S/240-460
12,5/S/240-460
25/S/240-46050/S/240-460
4/S/580-460
7,5/S/580-460
12,5/S/580-460
25/S/580-46050/S/580-460
4/S/500-460
7,5/S/500-46012,5/S/500-460
25/S/500-460
50/S/500-460
4/S/690-460
7,5/S/690-460
12,5/S/690-460
25/S/690-460
50/S/690-460
A
240
335
360480
580
240
240
300360
420
180205
240
300
335
240
300
335
420480
C
150
175
190195
265
130
140
155190
215
105130
140
155
175
140
155
175
205222
B
260
365
395500
540
260
260
325395
450
190210
260
325
365
260
325
365
450500
F
170
230
250356
400
170
170
210250
280
125145
170
210
230
170
210
230
280356
E
110
160
170-----
270
110
110
140170
190
8095
110
140
160
110
140
160
190-----
G
120
145
160158
215
100
110
125160
155
7595
110
125
145
110
125
145
145185
HÆ
11
11
1113
18
11
11
1111
14
77
11
11
11
11
11
11
1413
24,5
55
70
135195
18
22
37
7295
8,5
1322
36
53
22
37
57
88178
10
10
10
3570
4
4
10
1035
4
410
16
35
10
10
10
1635
120
225
310
500750
140
260
375
6251000
160
260440
750
1050
140
225
375
500750
DenominaciónDST... Peso en
kg.
Potenciadisipada
en W.
Dimensiones en mm.Relaciónde
transformación
0.52
1.26
1.08
1.5
Versión vertical para montaje en soportes: DST...../S
Esquema eléctrico
Potenciaenlazadaen kVA.
AC (200...240) V ±10%
AC (480...580) V ±10%
AC (480...500) V ±10%
AC (570...690) V ±10%
4
7,5
12,5
2550
4
7,5
12,5
2550
4
7,5
12,525
50
4
7,5
12,5
25
50
Tensión de entrada:
1993Bj.
50/60 Hzf40/BT
Placa (ejemplo)
Secciónmáx.
conexiónen mm.²
Tensión de entrada:
Tensión de entrada:
Tensión de entrada:
Fig. 9-2: Autotransformadores DST para DKC01.1-40-7-FW/DKC11.1-40-7-FWpara adaptación de la tensión de red

ECODRIVE DKC01.1/DKC11.1
9-4 Transformadores DST / DLT DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
9.3 Transformadores para DKC**.*-030-3-FW
MB0208D4:FH/
U4U3U2
U1
N
V4V3V2
V1
W4W3W2
W1
440V415V380V
220V
C1
B1 G
1
A
EFD
HGC
EF
A
D
H
B
a
b
400V
230V
Type:
Prim.:
Sec.:
S
DST 2,5/S/380/415/440-220
380-400/415/440 V
220-230V
2,5 kV A f 50/60 Hz
Bj. 1993
YNa0 T 40/B
A
150150180180180205205240240240240240240240240300300300300300300335335335360360360360360360360420
B1
170170205205205235235270270270270270270270270340340340340340340380380380400400400400400400400460
B
165165190190190210210260260260260260260260260325325325325325325365365365395395395395395395395450
C
7590
105115115120120120120140140150150155155140155165180195195195195195190190190205205190205215
C1
8095
100100110110110135135155155165165170170165180195205220220225225225215215215230230215230210
D
125125125150150150170200200200200200200200200250250250250250250280280280300300300300300300300350
E
70708080809595110110110110110110110110140140140140140140160160160170170170170170170170190
F
100100125125125145145170170170170170170170170210210210210210210230230230250250250250250250250280
G1
154154185185185209209240240240240240240240240310310310310310310350350350370370370370370370370420
H
667777711111111111111111111111111111111111111111111111114
46
8,51010
11,511,518182121
24,524,52626
30,536425053536565656868688080708092
G
557075858585859090110110120120125125110125135150165165160160160160160160175175160175165
0,5/ · /380/415/440-2200,5/ /380/460/500-2201,0/ /380/415/440-2201,0/ /380/460/500-2201,5/ /380/415/440-2201,5/ /380/460/500-2202,0/ /380/415/440-2202,0/ /380/460/500-2202,5/ /380/415/440-2202,5/ /380/460/500-2203,5/ /380/415/440-2203,5/ /380/460/500-2204,0/ /380/415/440-2204,0/ /380/460/500-2205,0/ /380/415/440-2205,0/ /380/460/500-2207,5/ /380/415/440-2207,5/ /380/460/500-22010/ /380/415/440-22010/ /380/460/500-220
12,5/ /380/415-22012,5/ /440/460-22012,5/ /500/525-22015/ /380/415-22015/ /440/460-22015/ /500/525-22018/ /380/415-22018/ /440/460-22018/ /500/525-22020/ /380/415-22020/ /440/460-22020/ /500/525-220
···················
···
·········
4444444444
10101010101010101010101010161616161616161616
304045555575809095110125130140150160180200230245250260270285290305310330350375380395430
ÆÆ
1)
Æ
Autotransformadores DST con tensión secundaria o de salida de CA (de 380 a 460) Voltios
1) Interruptor térmico carga máx.: DC 24V/1A; AC 230V/1A
DenominaciónDST...
Peso enkg.
Potenciadisipada
en W.
Dimensiones en mm.
Versión vertical para montaje en soportes: DST...../S
Esquema eléctricoPlaca (ejemplo)
Secciónmáx.
conexiónen mm.²
Versión horizontal para montaje a pared: tipo DST.../L
• = L, versión horizontal• = S, versión vertical
Fig. 9-3: Autotransformadores trifásicos para el DKC01.1-030-3-FW para laconexión a redes > 230 Voltios

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Transformadores DST / DLT 9-5
A
180180205205240240240240300300300300335335360360360360420420
B1
205205235235270270270270340340340340380380400400400400
B
190190210210260260260260325325325325365365395395395395450450
C
105105130130140140150150140140165165175175190190205205245275
C1
100100120120155155165165165165195195210210215215230230
D
150150170170200200200200250250250250280280300300300300350400
E
80809595110110110110140140140140160160170170170170190190
F
125125145145170170170170210210210210230230250250250250280280
G1
185185209209240240240240310310310310350350370370370370
777711111111111111111111111111111616
G
75759595110110120120110110135135145145160160175175195225
0,5/ /380/415/440-2200,5/ /380/460/500-2201,0/ /380/415/440-2201,0/ /380/460/500-2201,5/ /380/415/440-2201,5/ /380/460/500-2202,0/ /380/415/440-2202,0/ /380/460/500-2202,5/ /380/415/440-2202,5/ /380/460/500-2204,0/ /380/415/440-2204,0/ /380/460/500-2205,0/ /380/415/440-2205,0/ /380/460/500-2207,5/ /380/415/440-2207,5/ /380/460/500-22010/ /380/415/440-22010/ /380/460/500-220
15/ /380-22020/ /380-220·
···················
MB0209D4
4444444444
10101010101010101635
6570
120140155165180195220235240265300350375395500510600800
C1
B1
G1
A
EFD
HøG
B
C
EF
A
D
Hø
Type:
Prim.:
Sec.:
S
DL T 2,5/S/380/415/440-220
380-400/415/440 V
220-230V
2,5 kV A f 50/60 Hz
Bj. 1993
Yyn0 T 40/B
2U11U1, 1V1, 1W1
415 V
380 V. V
a
b
2V1
2W1
2N1
1U11U21U31V11V21V31W11W21W3
440 V
220 V. V
1U2, 1V2, 1W2
1U3, 1V3, 1W32U1, 2V1, 2W1
.
8,58,513132121
24,524,530,530,54242555570708585
122152
Hø
1)
Autotransformadores DST con tensión secundaria o de salida de CA (de 380 a 460) Voltios
1) Interruptor térmico carga máx.: DC 24V/1A; AC 230V/1A
DenominaciónDST...
Pesoenkg.
Potenciadisipada
en W.
Dimensiones en mm.
Versión vertical para montaje en soportes: DST...../S
Esquema eléctricoPlaca (ejemplo)
Secciónmáx.
conexiónen mm2²
Versión horizontal para montaje a pared: tipo DST.../L
• = L, versión horizontal• = S, versión vertical
Fig. 9-4: Transformadores de separación trifásicos para DKC01.1-030-3-FW parala conexión a redes > 230 Voltios (redes no a tierra)

ECODRIVE DKC01.1/DKC11.1
9-6 Transformadores DST / DLT DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
9.4 Conexión eléctrica del DKC mediante transformador
AP0234D4.fh7NFD
Conexiondepotenziapara otrosDKC
DKC
PEL1L2L3
PEL1L2L3
Q1K1
3 x AC50...60 Hz
Conexion de potenzia en X8:
3 x AC 380...480 V para DKC 01.1-040-7-FW
3 x AC 230 V bei DKC 01.1-030--3-FW3 x AC 380...480 V DKC 11.1-040-7-FW
E'L1'L2'L3'
X8 L1 L2 L3
1 2 3
DST
Filtro de red
para
Fig. 9-5: Conexión a la red mediante autotransformador trifásico
AP0235D4.fh7
DKC01.1-030-3
1 x AC 230 V DKC 01.1-030-3-FW
PEL1
N
PEL1
N
1 x AC50...60 Hz
Q1 K1
PEL1'
N'
X8 L1 L2 L3
1 2 3
NFE
Conexiondepotenziapara otrosDKC
Conexion de potenzia en X8:
para
Filtro de red
Fig. 9-6: Conexión directa a la red monofásica mediante autotransformador

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Transformadores DST / DLT 9-7
9.5 Código de identificación
DST 20,00/S/380,415-220-YYNO
Tensión nominal di salida (de fase a fase)AC 230 V
Tensión nominal de salida (de fase a fase)AC 380 V; AC 415 V
Forma de construcciónMontaje horizontalMontaje vertical
Potencia nominal en kVA.20 kVA
GrupoAutotransformador trifásicoTransformador de separación trifásico
TL0201D4
DST
DLT
20,00
L
S
380,415
220
Elementos del código: Ejemplo:
Grupo de acoplamientoYYNO YYNO
Fig. 9-7: Código de identificación de los transformadores

ECODRIVE DKC01.1/DKC11.1
9-8 Transformadores DST / DLT DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Proyecto del armario eléctrico 10-1
10 Proyecto del armario eléctrico
10.1 Advertencias para la instalación en el armario eléctrico
A excepción de los motores, todos los componentes de los sistemas deaccionamiento ECODRIVE están destinados para la instalación en unarmario eléctrico. El proyecto del armario eléctrico debe basarse en losdatos técnicos de los componentes del accionamiento.
Potencia disipadaLa potencia disipada está determinada por el amperaje y por la potenciacontinua de retorno. La potencia disipada efectiva depende, cada vez, delciclo de carga para el cual ha sido dimensionado el servomotor adoptado.
Normalmente la corriente máxima que atraviesa el regulador es lacorriente permanente de inactividad IdN del servomotor.
⇒ Obtener mediante la documentación del motor, la corrientepermanente de inactividad (ver "ECODRIVE - servomotores MKD" -Proyecto -).
⇒ Con la IdN del motor obtener del diagrama de la Fig. 10-1 la potenciadisipada PV, DKC dependiente de la corriente.
⇒ Multiplicar por el factor 0,8 la potencia continua de retornodeterminada en base al cuadro de la Fig. 3-2 para convertirla enpotencia disipada en el DKC PV, Bleeder dependiente del bleeder.
⇒ Sumar las dos potencias disipadas (PV,DKC e PV,Bleeder). Utilizar elresultado obtenido (PV,ges) para proyectar el armario eléctrico.
Corriente permanente de inactividad del motor Idn in A.
020406080
100120140160180200
4 8 12 16
Pot
enci
a di
sipa
da P
v in
W.
DG0201D4.fh7
Fig. 10-1: Determinación de la potencia disipada en el armario eléctrico
Determinación de la potenciadisipada

ECODRIVE DKC01.1/DKC11.1
10-2 Proyecto del armario eléctrico DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
10.2 Instalación de los grupos de enfriamiento en los armarioseléctricos
Los grupos de enfriamiento, si son utilizados e instaladosinadecuadamente, pueden provocar la formación de rocío y decondensación. con el consecuente daño para los componentes delaccionamiento alojados en el armario eléctrico.
El aire caliente y húmedo que penetra en el armario eléctrico, determinaal enfriarse, la formación de rocío en los componentes del accionamientoque están instalados.
Si el grupo no está bien colocado en el interior del armario eléctrico, lacondensación, siempre presente en los grupos de enfriamiento, puedegotear en los componentes del accionamiento o ser pulverizada en suinterior junto con el flujo de aire frío.
Uso correcto de los grupos de enfriamiento:
• Con los grupos de enfriamiento es necesario utilizar exclusivamentearmarios eléctricos con perfecta estanqueidad, para excluir de estamanera que el aire caliente y húmedo procedente del exterior puedadeterminar la formación de rocío.
• En caso de funcionamiento de los armarios eléctricos con la puertasabiertas (puesta en funcionamiento, mantenimiento, etc.) es necesariogarantizar que después del cierre de las puertas, los componentes delaccionamiento no alcancen nunca temperaturas inferiores a las delaire. En caso contrario se formará rocío. El grupo de enfriamientodebe por lo tanto permanecer en funcionamiento incluso cuando sedesactiva la instalación para mantener en el mismo nivel latemperatura del aire en el interior del armario eléctrico y la de loscomponentes del accionamiento.
• Regular los grupos de enfriamiento de regulación fija de latemperatura en el valor de 40 °C. ¡La temperatura no debe estarnunca por debajo de dicho valor!
• Regular los grupos de enfriamiento a regulación variable de latemperatura, de forma que la temperatura interna del armario no seainferior a la temperatura del aire externa. ¡Establecer la limitación detemperatura en 40 °C!
Disponer siempre los grupos de enfriamiento de manera que lacondensación no pueda gotear en el interior de los componentes delaccionamiento instalados en el armario. El armario eléctrico para losgrupos que se encuentran instalados en el techo, debe cumplir condeterminados requisitos de construcción.
La configuración del armario eléctrico debe impedir que el ventiladorpueda pulverizar sobre los componentes del accionamiento lacondensación acumulada en las pausas de funcionamiento.
• La condensación producida por el grupo de enfriamiento no debe enningún caso gotear sobre los componentes del accionamiento.
• Regular correctamente la temperatura de los grupos de enfriamiento.
Formación de rocío
Condensación
Como evitar la formación derocío
Como evitar gotas ypulverizaciones de agua
Resumen

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Proyecto del armario eléctrico 10-3
erróneocorrecto
Grupo de enfriamiento
Armario eléctrico
caliente frío
Conductodel aire
Aparatoselectrónicos
EB0200D4
Grupo de enfriamiento
caliente frío
Aparatoselectrónicos
Armario eléctrico
Fig. 10-2: Disposición del grupo de enfriamiento en el techo del armarioeléctrico
EB0201D4
Entrada aire
Salida aire
erróneocorrecto
Grupo deenfriamiento
Armario eléctrico
Conductodel aire
Aparatoselectrónicos
Aparatoselectrónicos
Armario eléctrico
Grupo deenfriamiento
Entrada aire
Fig. 10-3: Disposición del grupo de enfriamiento en la pared anterior del armarioeléctrico

ECODRIVE DKC01.1/DKC11.1
10-4 Proyecto del armario eléctrico DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Conexión de potencia 11-1
11 Conexión de potencia
11.1 Conexión directa a la red
Estos reguladores pueden ser enlazados directamente a las redestrifásicas a tierra 3 x AC de 380 a 480 Voltios, +10 %. Para la línea dealimentación son necesarios únicamente una protección Q1, un contactorgeneral K1, y generalmente, un filtro de red.
Si la tensión de red no se ajusta en el campo admitido para la tensión deentrada, la adaptación de la tensión se confiará a un autotransformador,dimensionado también por un determinado campo de tensión (ver Cap. 9-1).
Este regulador puede conectarse directamente a las redes trifásicas atierra 3 x AC 230 Voltios, ±10 %. Es posible efectuar para los valores depotencia una conexión monofásica 1 x AC 230 Voltios.
Para la línea de alimentación son necesarios únicamente una protecciónQ1, un contactor general K1 y normalmente, un filtro de red.
Si la tensión de red no se ajusta al campo admitido para la tensión deentrada, la adaptación de la tensión se regula mediante unautransformador, o si la red presenta características específicas, con untransformador de separación (ver Cap. 9-1).
AP0232D4PE
L1L2L33 x AC
50...60 HzPE
L1L2L3
Q1 K1
DKC01.1-030-3DKC01.1-040-7DKC11.1-040-7
E'
L1'
L2'
L3'
X8 L1 L2 L3
1 2 3
Conexióndepotenziapara otrosDKC
Filtro de red NFD
Fig. 11-1: Conexión directa a la red, trifásica
X8
AP0233D4.fh7
L1 L2 L3
1 2 3
DKC01.1-030-3
PE
L1
N
PE
L1
NQ1 K1
1 x AC50...60 Hz
PE'
L1'
N'
PE
L1
N
Conexióndepotenziapara otrosDKC
Filtro de red NFD
Fig. 11-2: Conexión directa a la red, monofásica
DKC01.1-040-7-FWDKC11.1-040-7-FW
DKC01.1-030-3-FW

ECODRIVE DKC01.1/DKC11.1
11-2 Conexión de potencia DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
11.2 Contactor general/protección
Para facilitar la selección del contactor general adecuado y del dispositivode protección de la conexión de potencia, existe un cuadro de selección(ver Fig. 11-5).
Cálculo de la corriente de fase de redPara poder seleccionar el contactor general y el dispositivo de protecciónde la conexión de potencia adecuados, es necesario calcular antes lacorriente de fase de red IN.
La corriente de fase de red IN se obtiene de la potencia aparente S.
Recabar la potencia aparente de las listas de selección de loscomponentes del accionamiento, o calcularla con la fórmula de la Fig. 11-3. En caso de utilizar más de un regulador, sumar cada valor de potenciaaparente.
60 Q
N$1
()) 0,77(/
⋅ ⋅ ⋅π
SAN: Potencia enlazada en VA.MEFF: Par efectivo en Nm.nMITTEL: Régimen medio en min.-1
k: k = 1,35 con UNETZ = 400 V.k = 2,0 con UNETZ = 480 V.
UNETZ: Tensión de red
Fig. 11-3: Cálculo de la potencia enlazada
Conexión monofásica: ,681
$1
1
Conexión trifásica: ,6
81
$1
1
⋅
IN: Corriente de fase de red en A.SAN: Potencia enlazada en VA.UN: Tensión entre las fases de la red en V.
Fig. 11-4: Cálculo de la corriente de fase de red
Selección de la protección Q1 y del contactor general K1
La protección debe ser dimensionada para una corriente 1,5 vecessuperior a la corriente de red efectiva IN.
Esta puede constar de:
• un interruptor automático (interruptor de potencia) o bien
• un interruptor de potencia o bien
• fusibles.
Protección Q1

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Conexión de potencia 11-3
El contactor general debe se ha de seleccionar en función de la corrientede fase de red y de la tensión nominal de red.
La corriente nominal del contactor general debe ser 1,5 veces superior ala corriente de fase de red efectiva.
Para una tensión nominal de red de 3 x 400 Voltios, 50 Hz. se aconseja elempleo de los contactores generales indicados en el cuadro de selecciónen función de la corriente de fase IN.
Los tipos de la marca Siemens indicados en el cuadro de selección sonfacilitados como ejemplo. Se admite el empleo de productos equivalentesde otros fabricantes.
Protección aconsejada Contactor aconsejado
Corrientede fase
Seccióndel
conductor
(1)
Interruptorautomático
(caracter. deresorte C)
Interruptor de potencia Fusibles(clase de
funcionamientogl)
(para UN = 3 x 400 V.50 Hz.)
INen A. mm.2
Corrienteen A.
N(3)
TipoSiemens
Valorestablecido
en A.
N(3)
Corrienteen A.
N(3)
TipoSiemens
Corrientenom. defuncio-
namiento (2)
N(3)
hasta8,7
1,0 10 5 3VU1300- .ML00
10 12 10 4 3TF41 (4) 12 7
hasta 11 1,5 16 7 3VU1300- .MM00
16 19 16 6 3TF42 (4) 16 10
hasta 15 2,5 20 9 3VU1300- .MP00
20 24 20 9 3TF43 (4) 22 13
hasta 21 4,0 32 15 3VU1300- .MP00
25 30 32 14 3TF44 (4) 32 19
(1) Los valores se refieren a cables multipolares con aislamiento en PVC colocados en tubos de protección y en cunículos paracables a la temperatura ambiente de 45 °C (según EN 60204-1/1992).
(2) El amperaje ha sido definido para el funcionamiento con AC 3 para una tensión de red de AC 400 Voltios, 50 Hz.
(3) N = número máximo de sistemas de accionamiento que se pueden conectar respetando la corriente de introducción. En casode conectar un número de sistemas superiores al indicado, se deberá seleccionar un dispositivo de protección y un contactorgeneral con amperaje superior.
(4) Utilizar el limitador de sobrecarga de tensión tipo 3TX7402-3D.
Fig. 11-5: Cuadro de selección para la protección Q1 y el contactor general K1
Contactor general K1
Cuadro de selección

ECODRIVE DKC01.1/DKC11.1
11-4 Conexión de potencia DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
11.3 Circuito de mando de la conexión de potencia
EI circuito de mando aconsejado por INDRAMAT ilustra únicamente elprincipio de funcionamiento.
La selección del tipo de mando y su efecto dependen de la cantidad defunciones y de la acción de la instalación o de la máquina en su conjunto.Por lo tanto dicha selección es tarea del fabricante de la instalación o dela máquina.
La señalización de preparado para el funcionamiento es facilitada por elcontacto de un relé (contacto n.a.). Cuando el contacto Bb se cierra esposible conectar la potencia de la instalación. El contacto por lo tanto esutilizado como condición para el encendido del contactor general. (ver laFig. 11-6).
Advertencia: Cuando se desactiva la alimentación, la bobina delcontactor genera sobrecargas de tensión que puedencausar una avería prematura en el contacto Bb. Paraatenuar dichas sobrecargas utilizar un limitador desobrecarga de tensión con grupo de diodos.
No se admite el uso de varistores como conexión de protección. Losvaristores están sujetos a envejecimiento y aumentan sus corrientes debloqueo, lo que puede determinar el daño prematuro de los componentesy de los aparato conectados.
El contacto Bb se abre:
• en ausencia de tensión de mando del DKC;
• en caso de anomalía en el accionamiento.
AP0237F5.fh7
K1
Microinterruptorde tope
Parada deemergencia
Desactivaciónpotencia
Activaciónpotencia
0V
Contactorgeneral
Asensoregulador
PLC
K1
Tensión de mando externa + DC 24 Voltios
2)XAsenso regulador
en DKC
X 4 - Tablero de bornes en DKC
Señalización deanomalía delcontrolador
1)
X
X
Contacto depreparado para elfuncionamiento
en el DKC
Bb3)
K1 K4
K4
Contactorauxiliar
4)
1) Conexión en serie de los contactos Bb de otros DKC y del BZM2) Asenso regulador para otros DKC en el mismo contador general3) Potencia de conexión DC 24 V./1 A.4) Utilizar un limitador de sobretensiones con grupo de diodos.
Fig. 11-6: Circuito de mando general del DKC
Contacto de señalización depreparado para el
funcionamiento Bb
Estados de encendido

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Conexión de potencia 11-5
11.4 Protección contra el contacto indirecto
A causa de las fuertes corrientes capacitivas dispersas medianteaislamiento del cables en la línea de alimentación de red, no es posibleinstalar un interruptor de seguridad para corrientes de avería (según DINVDE 0160, párrafo 6.5).
La protección contra el contacto indirecto debe ser asegurada medianteotro modo.
Los componentes del sistema de accionamiento están dotados de unacarcasa aislada. La protección contra el contacto indirecto se puede, porlo tanto, obtener con la puesta a tierra del neutro.

ECODRIVE DKC01.1/DKC11.1
11-6 Conexión de potencia DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Preparativos para la puesta en funcionamiento 12-1
12 Preparativos para la puesta en funcionamiento
Equipo necesarioPara la puesta en funcionamiento del sistema de accionamientoECODRIVE es necesario el siguiente equipo:
• Instrumentos de medición;
• un ordenador (PC);
• cable de conexión (PC - DKC);
• transductor del valor nominal.
Para poder medir, en las salidas analógicas, los valores de par decorriente y de régimen facilitados bajo forma de señales analógicas, sonnecesarios los siguientes instrumentos de medición:
• un multímetro para la medición de la tensión (suficiente para la puestaen funcionamiento de serie);
• un osciloscopio o un registrador (necesario sólo para registrar elavance de las señales durante la puesta en funcionamiento delprototipo).
El PC sirve para programar, definir los valores variables y diagnosticardurante la puesta en funcionamiento y para las intervenciones demantenimiento:
Requisitos hardware:
• IBM compatible;
• microprocesador 80386-SX (mejor si 80486);
• por lo menos 4 MB RAM (mejor si 8 MB);
• disco fijo con al menos 2,5 MB de espacio disponible;
• driver para floppy de 3,5" con capacidad de 1,44 MB;
• una interfaz serial RS232 en el PC (COM 1 ó COM 2);
• monitor EGA o con resolución superior;
• ratón u otro puntador compatible.
Requisitos software:
• sistema operativo DOS 5.0 ó superior;
• Windows 3.1 ó superior;
• programa para la puesta en funcionamiento DriveTop (floppy incluidoen la dotación del ECODRIVE).
Para la conexión de un PC con conector D-SUB de 9 polos utilizar uncable tipo IKS101.
Para la conexión de un PC con conector D-SUB de 25 polos utilizar uncable tipo IKS102.
Para el destino de los pins del cable ver la Fig. 4-17.
Instrumentos de medición
Ordenador personal (PC)
Cable de conexión (PC - DKC)

ECODRIVE DKC01.1/DKC11.1
12-2 Preparativos para la puesta en funcionamiento DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Para poner en movimiento el accionamiento es necesario suministrar unvalor nominal mediante la interfaz correspondiente (de posicionamientoanalógico o del motor paso/paso).
Para realizar las pruebas es posible suministrar un valor nominal derégimen mediante la interfaz analógica con la ayuda de un transductor devalor nominal.
Con dicha finalidad, es necesario conmutar el ECODRIVE enfuncionamiento con la interfaz de posicionamiento o la interfaz del motorpaso/paso en la modalidad operativa principal “Regulación del régimencon valor nominal analógico”
La figura siguiente indica la conexión sugerida para el transductor delvalor nominal.
1
2
3
4
10k
V
13k
DC (-10...+10)V
+15 V
-15 V
E1
E2
IRED1
IRED2
1
2
3
4
24V
RF
AH/Start
0VM
Asenso regulador
Parada/puesta en marchaaccionamiento
AP0242D4
X3
X4
DKCTransductor del valor nominal
Valor nominal conmutación dirección
Entradaanalógicavalornominal
Fig. 12-1: Circuito sugerido para la conexión del transductor del valor nominalcon la interfaz analógica.
Transductor del valor nominal

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Estado de suministro de los componentes del sistema de accionamiento 13-1
13 Estado de suministro de los componentes delsistema de accionamiento
Embalaje La modalidad de embalaje depende del tipo de pedido. Un embalajepuede contener un sólo componente o más de uno. Los accesorios estánfijados al aparato.
El material de embalaje será retirado gratuitamente por INDRAMAT. Loscostes derivados del retorno del embalaje corren a cargo del cliente.
La etiqueta con los códigos de barra aplicada en el embalaje permite laidentificación de los componentes contenidos en el embalaje, y el pedido.
Tipo de aparato
Nombre delcliente
Númerocategórico
Cantidad
No. de pedido delcliente
Número de seriecodificado del
aparato
Número depedido
Tipo de firmware
BP0200D4.fh7
Fig. 13-1: Etiqueta de los códigos de barra en el embalaje
Documentos de expediciónEn uno de los embalajes de suministro está aplicado un sobre quecontiene el boletín de entrega por duplicado. No están previstos otrosdocumentos de expedición a menos que no se hayan decidido acuerdosespeciales al momento de formular el pedido.
En el boletín de entrega o en la carta de porte se indica el número total depaquetes.
Identificación de los componentesCada componente del accionamiento consta de la adecuadadenominación.
Todos los aparatos, incluso el motor, tienen aplicada una placa.
Entorno a los cables preensamblados hay una placa (marca del cable) enla que se indican la denominación y la longitud (la denominación del cablepropiamente dicho, sin conector, se encuentra impreso en la vaina).
Para los accesorios que se suministran en paquetes, la identificación estáimpresa en el paquete mismo o sobre una etiqueta adjunta.
Embalajes
Material de embalaje
Etiqueta del embalaje

ECODRIVE DKC01.1/DKC11.1
13-2 Estado de suministro de los componentes del sistema de accionamiento DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas

ECODRIVE DKC01.1/DKC11.1
DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97 Índice analítico 14-1
14 Índice analítico
&
&DSDFLGDGGHOFLUFXLWRLQWHUPHGLRÂ6-1&DUUHUDDOSXQWRGHUHIHUHQFLDÂ4-17&LUFXLWRGHPDQGRÂ11-4&RQH[LyQGHSRWHQFLDÂ11-1&RQH[LyQPRQRIiVLFDGHOILOWURGHUHGÂ8-
3&RQH[LyQWULIiVLFDGHOILOWURGHUHGÂ8-4&RQH[LRQHVGHOFLUFXLWRLQWHUPHGLRÂ4-31&RQWDFWRUJHQHUDO.Â11-3
'
'HVSOD]DPLHQWRDLPSXOVRVÂ4-18'RFXPHQWRVGHH[SHGLFLyQÂ13-1
(
(PEDODMHÂ13-1(QHUJtDDFXPXODEOHÂ6-1(QHUJtDGHUHWRUQRÂ5-1(QHUJtDJLUDWRULDÂ6-1(QWUDGDDQDOyJLFDGHOYDORUQRPLQDOÂ4-25(WLTXHWDGHHPEDODMHÂ13-1
)
)RUPDFLyQGHURFtRÂ10-2
,
,QVWUXPHQWRVGHPHGLFLyQÂ12-1,QWHUID]$1$/Ï*,&$Â4-124-25,QWHUID]GH326,&,21$0,(172Â4-11,QWHUID]GHO027253$623$62Â4-14,QWHUID]GHOPRWRUSDVRSDVRÂ4-22,QWHUID]56Â4-15,QWHUID]56Â4-16
/
/LPLWDFLyQGHODFDUUHUDÂ4-18
0
0DQGRGHXQFDQDOÂ4-24
3
3DUÂ4-26
3RWHQFLDFRQWLQXDGHUHWRUQRÂ5-15-25-35-4
3RWHQFLDGLVLSDGDÂ10-13RWHQFLDPi[LPDGHUHWRUQRÂ5-13UHSDUDGRSDUDHOIXQFLRQDPLHQWR%EÂ11-
43URWHFFLyQ4Â11-23URWHFFLyQ4Â7-1
5
5HGHVDWLHUUDÂ9-15HGHVQRDWLHUUDÂ9-1
6
6DOLGDVGHGLDJQRVLVÂ4-266HxDOHVGHSRVLFLRQDPLHQWRÂ4-206HxDOHVGLIHUHQFLDOHVÂ4-226HxDOL]DFLRQHVGHHVWDGRÂ4-19
7
7HUPLQDOHV´?EÂ4-97UDQVGXFWRUGHOYDORUQRPLQDOÂ12-27UDQVIRUPDGRUHVÂ9-1
9
9DORUHIHFWLYRDEVROXWRGHSRVLFLyQHQIRUPDWR66,Â4-29
9DORUHIHFWLYRGHSRVLFLyQLQFUHPHQWDOÂ4-27

ECODRIVE DKC01.1/DKC11.1
14-2 Índice analítico DOK-ECODRV-DKC01/11.1*-PRJ1-ES-P • 05.97
Notas