Ejemplo Resuelto Comp Ens Adores LGR
3
ts 2% ≤ 4 3 Mp ≤ 0,25 e ss ≤ 0, 2 G(s)= K (s + 1)(s + 4)(s + 10) Mp ≤ 0,25 ⇒ ζ =0, 40 ts 2% ≤ 4 3 ⇒ 4 ζωn ≤ 4 3 ζω n ≥ ⇒ ω n =6, 86 s = -3 ± 6, 86j φ z - φ p = -180 o 0 o - (106, 3 o + 81, 71 o + 44, 42 o )= -232, 38 o = -180 o
Transcript of Ejemplo Resuelto Comp Ens Adores LGR

1 Ejemplos Resueltos
1.1. Diseño de Compensadores y Controladores (LGR)
Ejemplo
Para un sistema de control de retroalimentación simple cuya función de transferencia a lazo abierto es la que
se muestra en la ec. 1.1 se requiere diseñar un compensador tal que el sistema a lazo cerrado cumpla con los
requerimientos que se detallan a continuación.
ts2% ≤ 43 Mp ≤ 0,25 ess ≤ 0, 2 (escalón unitario)
G(s) =K
(s + 1)(s + 4)(s + 10)(1.1)
Solución
Se debe veri�car si los polos dominantes del sistema que cumplan con los requerimientos señalados ante-
riormente pertenecen o no al Lugar Geométrico de las Raíces. Para ello se ubican los polos y se utiliza la
condición de ángulo tal como sigue.
Polos Dominantes Deseados (PDD)
Mp ≤ 0,25 ⇒ ζ = 0, 40ts2% ≤ 4
3 ⇒ 4ζωn
≤ 43
ζωn ≥3 ⇒ ωn = 6, 86
De allí que los PDD se encuentran ubicados en s = −3± 6, 86j. Utilizando la condición de ángulo se veri�ca
si dichos polos pertenecen o no al LGR.
∑φz −
∑φp = −180o
0o − (106, 3o + 81, 71o + 44, 42o) = −232, 38o 6= −180o
Esto indica que los PDD no pertenecen al LGR, por lo que será necesario añadir un compensador en adelanto
que logré la modi�cación del LGR de forma tal que los PDD pertenezcan a él, para lo cual se calcula el ángulo
necesario.
1

1 Ejemplos Resueltos
φ = −180o + 232, 38o = 52, 38o ≈ 52o
Se utiliza el método según el cual, se coloca el cero del adelanto tal que proporcione un ángulo de 90o y se
calcula el polo tal que la diferencia en ángulo cumpla con lo requerido, con lo cual puede calcularse a su vez
la ubicación del polo.
φz − φp = 52o ⇒ φp = 90o − 52o = 38o
sp = −(
3 +(
6, 86tan (38o)
))= −11, 78
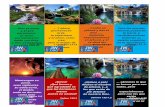
Se esboza el LGR para comprobar que con este diseño se logre que los PDD se encuentren en las ramas
dominantes del LGR. A continuación se muestra en la �g. 1.1 un esbozo del LGR considerando el diseño
previo.
Figura 1.1: Esbozo LGR Primer Diseño
Como se puede observar la rama dominante del lugar geométrico será aquella que se encuentra el polo en
s = 1 y el cero en s = −3, por lo que los PDD no serán dominantes. Esto quiere decir que este diseño no
puede ser realizado utilizando este método.
Utilizando el método de la bisectriz se ubican el cero y el polo del adelanto calculando los ángulos en forma
analítica quedando la función de transferencia del adelanto como sigue.
GAD(s) = Kc(s + 4, 36)(s + 15, 38)
En este caso, como el cero del adelanto se encuentra un poco más allá de s = −4, los PDD se encontrarán
en las ramas dominantes del LGR. Se ver�ca el valor del ángulo añadido por el cero y el polo y se calcula el
valor de la ganancia Kc utilizando la condición de módulo.
2

1.1 Diseño de Compensadores y Controladores (LGR)
φz − φp|PDD = o
Kc(s + 4, 36)
(s + 1)(s + 4)(s + 10) (s + 15, 38)
∣∣∣∣PDD
= 1
Kc(6, 99)
(7, 15)(6, 93)(9, 80)(14, 07)= 1 ⇒ Kc = 976, 51
Diseñado por completo el compensador por adelanto se calcula el error al escalón unitario para veri�car si se
cumple con la condición impuesta. Para ello se calculará primero el coe�ciente estático de error de posición
Kp y luego el error.
Kp = lıms→0
976, 51 (s + 4, 36)(s + 1)(s + 4)(s + 10) (s + 15, 38)
= 6, 92
ess =1
1 + 6, 92= 0, 12
De allí que se comprobó que el compensador diseñado cumple con los requerimientos solicitados, tanto en
respuesta transitoria como en permanente.
3