
Embedded’s en l’Automòbileia.udg.es/~qsalvi/isp/t9_pdf_2001.pdfInformàtica Sistemes de...
36
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001 Embedded’s en l’Automòbil Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001 Professor: Joaquim Salvi Alumnes: Eugenio Carmona Soriano Dolors Mendoza Hugas Eduard Vilanova Sánchez
Transcript of Embedded’s en l’Automòbileia.udg.es/~qsalvi/isp/t9_pdf_2001.pdfInformàtica Sistemes de...

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Embedded’s en l’Automòbil
Informàtica Sistemes de Producció
Enginyeria Informàtica
2000-2001
Professor: Joaquim Salvi
Alumnes: Eugenio Carmona Soriano Dolors Mendoza Hugas Eduard Vilanova Sánchez
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
PART 1: SISTEMES ELECTRÒNICS A L’AUTOMÒBIL. SENSORS. Cada cop més, el món de l’automoció i el de l’electrònica van més units. Això s’explica pel fet que el número de components electrònics que incorporen els cotxes ha augmentat considerablement durant els últims anys. En aquesta primera part del treball, doncs, veurem alguns d’aquests dispositius electrònics de què disposen molts dels automòbils que actualment podem trobar al mercat. N’analitzarem els seus components i funcionament, habitualment basat en sensors. A les altres dues part del treball, ens centrarem en els busos més utilitzats per comunicar tots aquests dispositius i els microprocessadors utilitzats. Centrant-nos ara en aquesta primera part, podem veure que tots els dispositiu que analitzarem segueixen un esquema similar:
1.- Els sensors capten determinades situacions. 2.- La informació s’envia a una unitat microprocessada. 3.- El microprocessador rep i interpreta aquesta senyal. 4.- Es prenen les mesures necessàries.
Els diferents sistemes que veurem són:
- Airbag. - ABS. - BAS. - Control d’Estabilitat (ESP). - Control de tracció (ASR o TCS). - Sistema de Suspensió Intel·ligent. - Sensor de Pluja. - Sensors d’Aparcament.
L’Airbag Un dels elements de seguretat passiva més popular dels últims anys és l’airbag. Es tracta d’una bossa d’aire que amaga molts components electrònics al darrera, i per tant, resulta interessant analitzar-lo en aquest treball. El seu origen el trobem als Estats Units, on el 1953 es va registrar la primera patent per instal·lar-lo en un cotxe. No obstant, va haver-hi molts problemes ja que el propi sistema provocava ferides greus als conductors. Així, l’evolució fa ser força lenta, i no va ser fins al 1981 que Mercedes el va oferir com a opció. 6 anys més tard va fer el mateix per l’airbag d’acompanyant. En els últims anys, aquest sistema ha evolucionat molt, amb variacions del grau d’inflat depenent de la violència del xoc, detectors de presència d’ocupant i un gran nombre de tipus d’airbags que s’adeqüen a cada tipus de xoc i ocupant. Tot seguit, analitzarem quines parts formen el sistema d’airbag, i com es relacionen entre elles. Com tots sabem, el més visible d’un airbag és la bossa d’aire (d’aquí ve el nom). No obstant, el sistema el formen una sèrie d’elements interconnectats entre ells que descriurem tot seguit. Les parts fonamentals de què consta un sistema d’airbag són: 1- Unitat de Control. 2- Unitat de Contacte. 3- Mòdul o unitat d’Airbag. Unitat de Control La unitat de control normalment està situada en una consola davant de la palanca de canvi. Consta dels següents elements:

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
- Un sensor de col·lisió elèctric, que medeix la desacceleració. - Un sensor de seguretat. - Un microprocessador. - Una unitat d’alimentació, amb memòria autònoma, que emmagatzema la informació. El sensor de col·lisió El sensor de col·lisió és un element que medeix la intensitat de les forces de frenada determinant la desacceleració del vehicle en el sentit longitudinal d’aquest, i que emet un senyal quan la desacceleració arriba a un determinat valor en un temps mínim. Pot anar integrat a la unitat de control o a part. En qualsevol cas, s’utilitzen dos tipus de sensors: - Sensor electromecànic. En els sistemes més simples s’utilitza com a sensor un detector de xoc
electromecànic d’altra precisió, format per un imant (que actua com a massa) i una molla calibrada. Quan la massa de l’imant es desplaça per efecte del xoc, venç la resistència de la molla, tancant un interruptor de làmina elàstica i, conseqüentment, es dispara el sistema.
- Sensor electrònic. En d’altres equips, el sensor treballa per impulsos elèctrics sobre quars , i es troba integrat en un sistema electrònic centralitzat. Això permet integrar en un xip informació sobre l’estructura i proves de xoc del model, que es consultada en milisegons després de l’impacte.
El sensor de seguretat Un interruptor de seguretat de mercuri incorporat a la unitat de control manté interceptat durant el règim de marxa normal els circuits d’ignició de l’airbag. Això fa que només es pugui disparar quan es produeix una desacceleració del cotxe anormalment brusca per les possibilitats de l’automòbil, fixada dins d’uns valors crítics prèviament establerts per tal d’evitar que s’activi els dispositiu davant d’una falsa alarma. Aquest sensor de seguretat es monta de sèrie amb el de col·lisió, i només amb la confirmació del primer podrà, el segon, disparar el sistema. D’aquesta manera hi ha una doble verificació pel que fa al moment d’activar l’airbag. El microprocessador El microprocessador és l’autèntic cervell del sistema, ja que decidirà quan s’activa l’airbag. Es composa d’un conjunt de dispositius semiconductors encapsulats en un únic xip. La seva tasca és avaluar dades i senyals externes, i en funció d’aquestes generar un senyal que es fa arribar al dispositiu d’ignició de l’airbag. El sensor de col·lisió que hem vist anteriorment capta la desacceleració que actua sobre el vehicle i envia un senyal al microprocessador. Aquest, al arribar al llindar establert dels valors, enviarà el senyal elèctric d’ignició als generadors de gas. La unitat de control pot tenir dos llindars d’activació: - Llindar baix. S’estableix tenint en compte les col·lisions lleus. S’activen els tensors del cinturó
(sempre i quan el vehicle disposi d’aquest equipament). - Llindar alt. Amb els tensors del cinturó ja activats, s’efectua l’ignició de l’airbag. Unitat d’alimentació La unitat d’alimentació s’encarrega d’emmagatzemar a la seva memòria les possibles avaries del sistema d’airbag i mostrar-les al conductor a través dels testimonis del quadre d’instruments. Si el sistema funciona correctament, el testimoni s’apagarà al cap de 10 segons d’haver posat el contacte; en cas contrari, el testimoni romandrà encès. La unitat d’alimentació s’encarregarà també d’emmagatzemar l’energia residual necessària per tal d’alimentar el disparador en cas que es produeixi una fallada elèctrica en els primers moments de l’impacte.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Unitat de contacte La unitat de contacte rotatori se situa a la part superior de la columna de direcció, prop del volant. La seva finalitat és assegurar el subministrament d’energia elèctrica entre el circuit electrònic de la unitat de control i la càpsula d’ignició del generador de gas. S’ha de tenir en compte que el volant ha de poder girar lliurament sense que es perdi el contacte elèctric. Per aconseguir-ho, s’utilitza un cable en espiral o molla situat a la unitat de contacte. La part superior de la molla gira amb el volant, mentre que l’altre meitat es manté fixa. La unitat de contacte també s’encarrega de subministrar electricitat al clàxon i a d’altres interruptors o sistemes de control que hi pugui haver instal·lats al volant. Mòdul o unitat d’airbag La unitat d’airbag es composa dels següents elements: - Generador de gas o inflador. - Bossa d’aire. - Tapa o coberta. Generador de gas o inflador El generador de gas, fixat sota la bossa d’aire, és un dispositiu pirotècnic que conté un combustible sòlid (suporta el pas del temps) i que està segellat a l’interior d’una cambra de combustible feta d’acer d’alta resistència. Pel que fa al combustible, concretament es tracta de pastilles de nitrur sòdic, disposades radialment a l’interior de la cambra de combustió. En el centre del generador de gas se situa una càpsula d’ignició, que disposa de la seva pròpia càrrega explosiva. Quan es produeix un accident, aquesta càpsula d’ignició rep un impuls elèctric des de la unitat de control i detona la seva càrrega, fet que provoca la combustió de les pastilles de nitrur sòdic. Aquesta combustió genera molt ràpidament la quantitat de nitrogen en estat gasós necessari per inflar l’airbag. En els vehicles més moderns, aquesta quantitat de gas variarà depenent de la intensitat del xoc. Cal dir que l’aire, abans d’arribar a la bossa, serà refrigerat. Si no es fes així, la seva excessiva temperatura podria rebentar la pròpia bossa. La bossa d’aire La bossa d’aire és la que, un cop inflada, forma el coixí pneumàtic que protegeix a l’ocupant en cas de col·lisió. En el moment en què es fabrica el sistema, la bossa es doblega de la forma més compacte possible, i se situa entre la tapa i la part superior del generador de gasos. La bossa està elaborada amb un teixit cosit de nylon o poliamida, i pot estar revestida en el seu interior per una capa de neoprè o silicona per tal de protegir-la, en la mesura del possible, de la calor dels gasos produïts en el generador. Com a curiositat, podem dir que per tal d’evitar que els plecs de la bossa s’enganxin entre ells i poguessin fer que no es desplegués bé, s’hi tiren polvos de talc abans de plegar-la.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
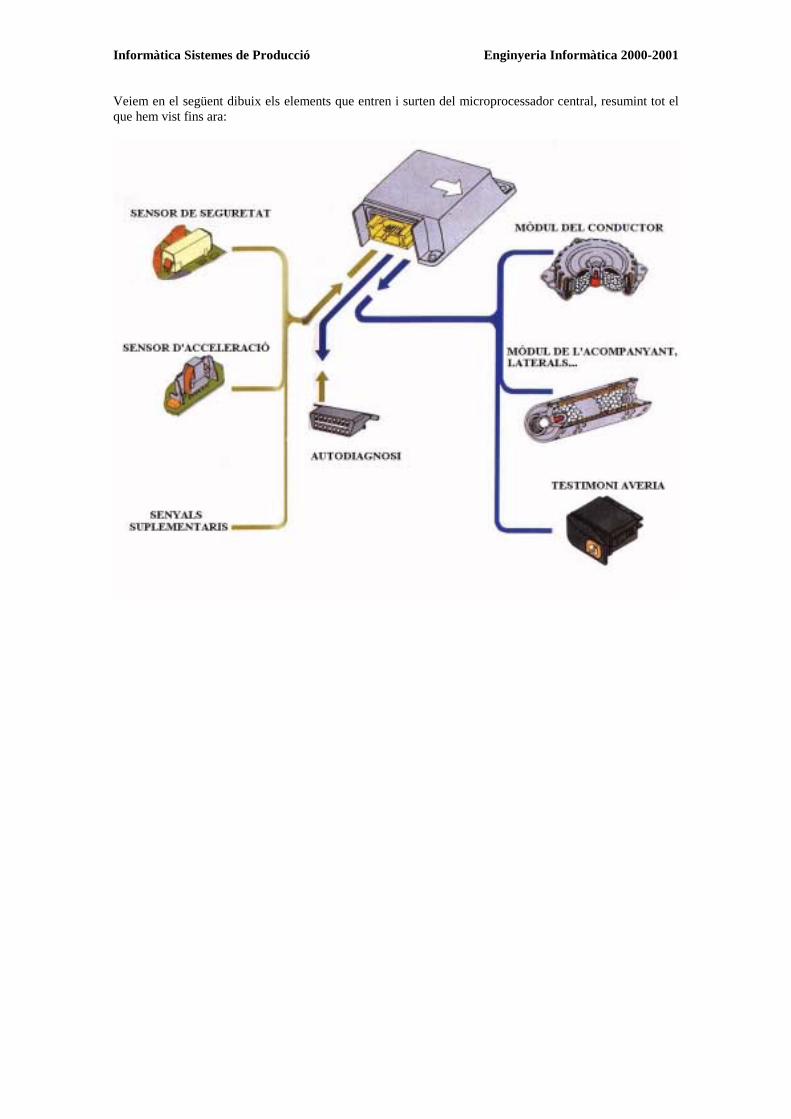
Veiem en el següent dibuix els elements que entren i surten del microprocessador central, resumint tot el que hem vist fins ara:

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Anem a il·lustrar amb el següent gràfic el procés que se segueix:
(1) Es produeix la col·lisió. (2) El sensor de col·lisió la detecta, i després de rebre la confirmació del sensor de seguretat envia el
senyal corresponent cap al microprocessador. (3) El microprocessador rep el senyal, l’interpreta i envia el senyal d’activació cap al generador de gas. (4) El generador de gas, després de rebre el senyal, detona una petita càrrega explosiva sobre el
combustible sòlid. (5) El combustible sòlid es crema, tot alliberant el gas (nitrogen). (6) La bossa s’infla i es desplega. Tipus d’airbags Els diferents components que hem explicat fins ara els podem trobar en diversos tipus d’airbag. Són els següents: Airbag del conductor S’infla més ràpidament que el de l’acompanyant, ja que el conductor té menys espai lliure davant seu. Per aconseguir-ho, la bossa haurà de disposar de recobriments addicionals que li permetin rebre una gran quantitat de nitrogen en poc temps sense rebentar-se. El volum d’aquestes bosses pot variar entre 30 i 45 litres pel mercat europeu i entre 60 i 80 pel mercat dels Estats Units. Això es deu a què l’airbag americà està pensat per ser efectiu fins i tot sense utilitzar el cinturó de seguretat. Airbag de l’acompanyant No s’infla tan ràpidament com la bossa del conductor, però el seu volum és més gran: entre 70 i 90 litres per Europa i entre 130 i 150 pels Estats Units.

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Lateral S’instal·la en el lateral del seien o bé a les portes del cotxe. La seva tasca és protegir el cap i malucs de l’ocupant. El seu volum és de 12 litres i s’acciona en un temps entre 3 i 5 milisegons. En aquest cas, el sensor que l’acciona el trobem col·locat a la porta, i reacciona amb els canvis de pressió en aquesta zona. Els airbags laterals els podem trobar tant pels ocupants de davant com pels de darrera, essent més habituals els primers. Cortina inflable Es tracta d’un airbag que va col·locat a la part interior del marc del cotxe. Protegeix el cap de l’ocupant impedint que es doni un cop contra la finestreta o el marc, i al mateix temps evita que penetrin objectes de l’exterior. S’infla en 25 mil·lèsimes de segon y recobreix el sostre de l’habitacle des de la seva part davantera fins al marc posterior, protegint tant als ocupants de la part davantera com del darrera. ABS, Antilock Brake System L’ABS és un component molt important de la seguretat activa del vehicle, que en l’actualitat trobem incorporat en un elevat percentatge dels vehicles que es venen. Bàsicament es tracta d’un sistema d’ajuda a la frenada que s’encarrega d’evitar que les rodes es bloquegin i patinin. Aquesta ajuda suposa un increment de seguretat important, ja que permet que el conductor tingui en tot moment el control de la direcció del vehicle, fins i tot quan frena bruscament sobre superfícies humides o no asfaltades. A més a més, l’ABS també redueix la distància de frenada. La mesura en què ho fa depèn de les condicions de la carretera:
- entre un 10 i un 15% per carreteres asfaltades en bones condicions. - entre un 25 i un 40 % per carreteres humides o no asfaltades.
Aquesta reducció de la distància de frenada s’explica pel fet que una roda en moviment produeix més fricció amb el terra que no una roda patinant. Això fa que el vehicle s’aturi abans si disposa d’un sistema de frenada que eviti que les rodes patinin. L’únic cas en què això no es compleix és quan es condueix sobre neu tova, ja que quan la roda patina acumula neu davant seu i fa que el vehicle s’aturi abans. És per això que alguns vehicles disposen d’un botó per desactivar l’ABS. Cal recordar que l’ABS només entrarà en acció quan es produeixin frenades brusques. La resta del temps es mantindrà inactiu, sense cap repercussió durant la conducció. Un aspecte molt important a tenir en compte és que l’ABS ha estat dissenyat com un sistema amb fallada segura o failsafe. Això significa que si, per qualsevol motiu, hi hagués un mal funcionament, el sistema es desactivaria i es passaria a frenada manual. Components Els components bàsics dels sistemes ABS són: - Sensors de velocitat per les rodes. - Mòdul de Control. - Sistema hidràulic de frenada. Sensor de velocitat per les rodes Aquests sensors els veiem bàsicament com una càpsula. Tenen un nucli magnètic, envoltat per una bobina. Quan la roda gira el camp magnètic s’inverteix, i indueix voltatge de corrent altern a les bobines de la càpsula. El voltatge induït sobre la càpsula serà directament proporcional a la velocitat de la roda. Així, a mesura que la velocitat augmenti, la freqüència i l’amplitud del sensor de velocitat de la roda s’incrementa. El senyal proporcionat per aquest sensor serà enviat al mòdul de control, on el valor de corrent altern es converteix en un senyal digital i s’interpreta.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Aquests sensors els podem trobar, depenent dels fabricants, muntats a diferents llocs:
- A l’eix de les rodes. - Al suport dels frens. - A l’eix de transmissió. - Prop del diferencial.
Mòdul de Control Es tracta d’un microprocessador que, segons l’entrada proporcionada pels sensors que acabem de veure, regula la pressió hidràulica durant la frenada per tal d’evitar el bloqueig de les rodes. El podrem trobar com a un mòdul separat o bé integrat amb altres mòduls electrònics del cotxe. Trobarem explicat amb més detall com actua a l’apartat de funcionament. Sistema de gestió de frenada Aquest sistema, després de rebre les ordres corresponents del mòdul de control, actua hidràulicament sobre els frens. Connexions Per interconnectar els diferents elements que integren el sistema d’ABS podem trobar diversos cablejats: - Cable sèrie del tipus 2. Disposa d’una velocitat de transmissió de 10.400 bps i opera a 7 volts. - Cable UART. Velocitat de transmissió de 8192 bps operant a 5 volts. Funcionament Tots els sistemes ABS saben quan les rodes patinen a través de la monitorització de la desacceleració relativa de les rodes durant la frenada. Si una de les rodes comença a desaccelerar més ràpid que les altres, és senyal que la roda està començant a patinar i ens trobem en perill de bloquejar-se. En aquest moment, el sistema d’antibloqueig respon reduint momentàniament la pressió hidràulica del fre sobre la roda o rodes afectades. Per aconseguir-ho s’utilitzen unes vàlvules que, electrònicament, treuen i afegeixen pressió als frens en intervals de temps molt petit. Això produeix un efecte de tremolor que el conductor pot notar en el pedal de fre durant la frenada. Aquesta acció provoca que disminueixi la càrrega de frenada sobre la roda afectada, i li permet recuperar la tracció i evitar el seu bloqueig . Un cop la roda afectada manté el mateix ritme de desacceleració que la resta, l’ABS deixa d’actuar i tornar al mode passiu. Com hem vist, el que fa l’ABS és equivalent a prémer i deixar anar el fre repetidament. No obstant, aquests sistemes ho fan a una velocitat de 12 vegades per segon (aproximadament). La impossibilitat de fer això per una persona, i menys en situació de risc, fa necessaris aquesta mena de sistemes. Alguns ABS, disposen d’un sistema complementari anomenat EBD. Es tracta d’un sistema electrònic de distribució de força de frenada entre els dos eixos del vehicle en funció de la càrrega. Per aconseguir-ho, es val dels mateixos elements que l’ABS (unitat de control, unitat hidràulica i sensors de velocitat). Configuracions Tots els sistemes d’ABS coneixen la desacceleració de la roda a través d’uns sensors. Depenent del nombre d’aquests sensors, podem trobar diferents configuracions: - Quatre canals. El vehicle disposa de 4 sensors, un per a cada roda. D’aquesta manera, el processador
central coneixerà en tot moment l’acceleració o desacceleració de cada roda, de forma independent.

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
- Tres canals. El vehicle té un sensor per cadascuna de les rodes davantera, però només un de comú per les dues rodes del darrera, muntat en el diferencial o a la transmissió. Amb aquesta configuració s’estalvia el cost d’un sensor addicional, i es redueix la complexitat del sistema fent que les dues rodes del darrera es controlin simultàniament.
- Un canal. El vehicle disposa únicament d’un sensor dedicat a monitoritzar les variacions de velocitat
de les rodes del darrera. Aquest sistema és molt més senzill i econòmic que els anteriors, però evidentment no es mostra tan eficaç. S’utilitza majoritàriament en vehicles de càrrega, on el pes que porten pot provocar pèrdues de tracció.
A la següent il·lustració podem veure un exemple d’un sistema ABS de l’empresa Bosch. Es tracta d’un sistema de 3 canals, és a dir, utilitza 3 sensors: dos per les rodes del davant i només un per les del darrera.
BAS Es tracta d’un complement de l’ABS i les seves sigles signifiquen Sistema d’Ajuda a la Frenada (Brake Assist System). El sistema BAS reconeix situacions de perill, moment en què s’activa i incrementa la força de frenada fins arribar al màxim. D’aquesta manera s’aconsegueix reduir de forma significativa la distància de frenada en situacions d’emergència. Aquest sistema es va crear després que Mercedes Benz fes força estudis sobre el comportament del conductors en situacions d’emergència en les que s’ha de frenar fins a parar el cotxe. Es va detectar que en aquests casos el 90% dels conductors es mostraven dubitatius a l’hora de frenar, i quan finalment es decidien a prémer el pedal, no ho feien amb la força suficient. Tenint en compte, BAS intervé quan el conductor reacciona ràpidament però de forma dubitativa sobre el pedal de fre en una situació d’emergència. El sistema monitoritza la velocitat amb què es posa i es treu el peu del pedal per saber quan es requereix una frenada d’emergència. El microprocessador rep aquest valor i el de la velocitat actual del vehicle i els compara amb altres valors de mostra que hi ha emmagatzemats a la memòria del sistema. Si el microprocessador decideix que existeix situació d’emergència, BAS actua de forma immediata sobre els frens. El sistema ABS evitarà que els frens es bloquegin.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
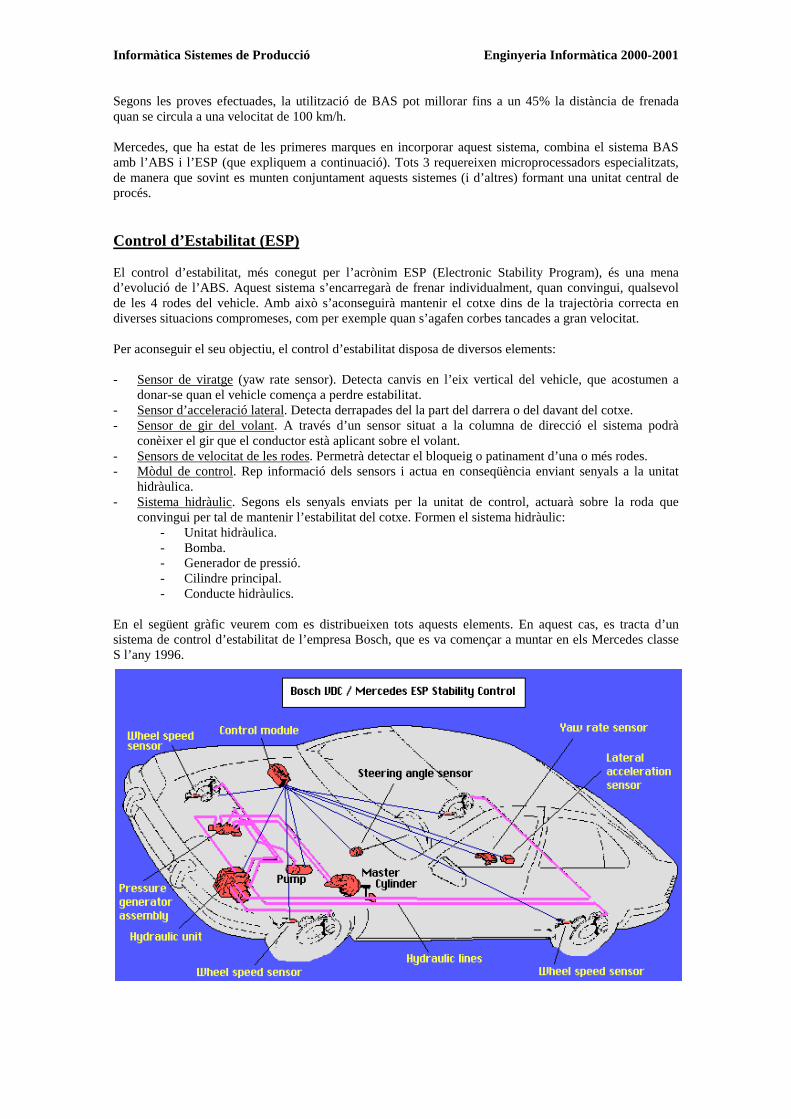
Segons les proves efectuades, la utilització de BAS pot millorar fins a un 45% la distància de frenada quan se circula a una velocitat de 100 km/h. Mercedes, que ha estat de les primeres marques en incorporar aquest sistema, combina el sistema BAS amb l’ABS i l’ESP (que expliquem a continuació). Tots 3 requereixen microprocessadors especialitzats, de manera que sovint es munten conjuntament aquests sistemes (i d’altres) formant una unitat central de procés. Control d’Estabilitat (ESP) El control d’estabilitat, més conegut per l’acrònim ESP (Electronic Stability Program), és una mena d’evolució de l’ABS. Aquest sistema s’encarregarà de frenar individualment, quan convingui, qualsevol de les 4 rodes del vehicle. Amb això s’aconseguirà mantenir el cotxe dins de la trajectòria correcta en diverses situacions compromeses, com per exemple quan s’agafen corbes tancades a gran velocitat. Per aconseguir el seu objectiu, el control d’estabilitat disposa de diversos elements: - Sensor de viratge (yaw rate sensor). Detecta canvis en l’eix vertical del vehicle, que acostumen a
donar-se quan el vehicle comença a perdre estabilitat. - Sensor d’acceleració lateral. Detecta derrapades del la part del darrera o del davant del cotxe. - Sensor de gir del volant. A través d’un sensor situat a la columna de direcció el sistema podrà
conèixer el gir que el conductor està aplicant sobre el volant. - Sensors de velocitat de les rodes. Permetrà detectar el bloqueig o patinament d’una o més rodes. - Mòdul de control. Rep informació dels sensors i actua en conseqüència enviant senyals a la unitat
hidràulica. - Sistema hidràulic. Segons els senyals enviats per la unitat de control, actuarà sobre la roda que
convingui per tal de mantenir l’estabilitat del cotxe. Formen el sistema hidràulic: - Unitat hidràulica. - Bomba. - Generador de pressió. - Cilindre principal. - Conducte hidràulics.
En el següent gràfic veurem com es distribueixen tots aquests elements. En aquest cas, es tracta d’un sistema de control d’estabilitat de l’empresa Bosch, que es va començar a muntar en els Mercedes classe S l’any 1996.

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Veiem ara, algun exemple representatiu de com funciona aquest sistema. Considerem un vehicle que entra en una corba.
Automàticament, gràcies als diferents sensors de què esdisposa, s’estableix la direcció que el cotxe hauria de seguirdins de la corba.
En aquest gràfic podem veure com la part deldarrera del vehicle es desplaça cap a l’interior dela corba, produint-se el que en anglès s’anomenaUndersteer. El sistema detectarà aquest viratge, i per corregir-lo actuarà sobre la roda davantera interior.
En aquest cas es produeix l’efecte contrari, ja que la part del darrera del vehicle es desplaça cal a l’exterior de la corba (Oversteer). L’ESP frenarà la roda davantera exterior per tal de corregir la trajectòria del vehicle

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
En aquest cas, per condicions deficient de la carretera, el cotxe es desplaça tot ellcap a l’exterior de la corba, de forma paral·lela a la carretera. Això és detectat pelsistema a través del sensor de viratge i del sensor d’acceleració lateral. Per corregir-ho, el sistema d’estabilitat actua sobre les dues rodes de davant, aplicant-hi repetidament petites frenades.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
ASR (Anti Slip Regulation) o TCS (Traction Control System) Aquest tipus de sistemes detecten, mitjançant la informació que rep dels sensors de les rodes, si s’ha produït una pèrdua d’adherència a alguna de les rodes motrius. A partir d’això, s’intenta evitar que aquesta patini, per la qual cosa hi ha diferents solucions (depenent del fabricant):
- Actuar sobre el motor, reduint-ne la potència. - Actuar sobre els frens. - Actuar sobre el diferencial, bloquejant-lo mitjançant pressió hidràulica. - Actuar sobre el motor o els frens depenent de la situació.
L’última opció és la més avançada, i també la que més èxit està tenint en aquests moments. És per això que, pel treball, ens centrarem en aquest tipus. Respecte als altres tipus de sistemes ASR, aporta els avantatges següents: - Millor estabilitat de marxa. - Major capacitat de maniobra. - Temps de reacció més curts. - Menor sobrecàrrega dels sistemes de frens (respecte als sistemes ASR que només actuen sobre els
frens). - Possibilitat de solucionar un ventall de situacions més ampli. Anem a veure com funciona. L’ASR, que el trobarem normalment integrat dins del mòdul ABS, serà capaç de detectar en quin moment patinen les rodes motrius. Quan això passa, s’envia un senyal al mòdul de control del motor, indicant-li la reducció de potència que ha de realitzar per tal que les rodes motrius recuperin l’adherència i deixin de patinar. Aquesta reducció de potència la realitza el mòdul de control del motor, desconnectant els injectors fins a aconseguir la potència més apropiada en funció de la situació recollida per la unitat. La finalitat de tot aquest procés serà corregir el patinament de les rodes motrius. De manera conjunta a la regulació de la potència del motor, en circumstàncies de diferent adherència de l’eix motriu (com podria ser una roda sobre el gel i una altra sobre l’asfalt) i baixa velocitat, el sistema realitza una intervenció sobre els frens de la roda que patina, enviant la potència de motor a la roda que té adherència. El sensor de pluja El netejaparabrises és un d’aquells elements que ha anat millorant de mica en mica, sempre amb el mateix principi de funcionament: una tira de goma de secció rectangular presiona el vidre i desplaça l’aigua. Ha millorat amb la possibilitat d’escombrar a diferent velocitats, de tenir una intermitència fixa o variable. En qualsevol cas, però, ajustar aquesta freqüència era sempre una tasca del conductor. Per tal d’alliberar el conductor d’aquesta tasca molts dels nous vehicles de gamma alta incorporen l’anomenat netejaparabrises automàtic. L’element principal del netejaparabrises automàtic és el sensor de pluja, un dispositiu basat en el principi físic de la refracció i reflexió de la llum. Quan un raig de llum canvia el medi que està travessant, poden passar 3 coses:
- Travessa el medi sense canviar de direcció. Només es dona quan el raig incideix perpendicularment.
- Travessa el medi canviant de direcció (refracció). Es produeix quan l’angle d’incidència és inferior als 90º.
- Es reflexa, com si hagués incidit en un mirall (reflexió). Es produeix per determinats angles d’incidència, que dependran de cada medi.
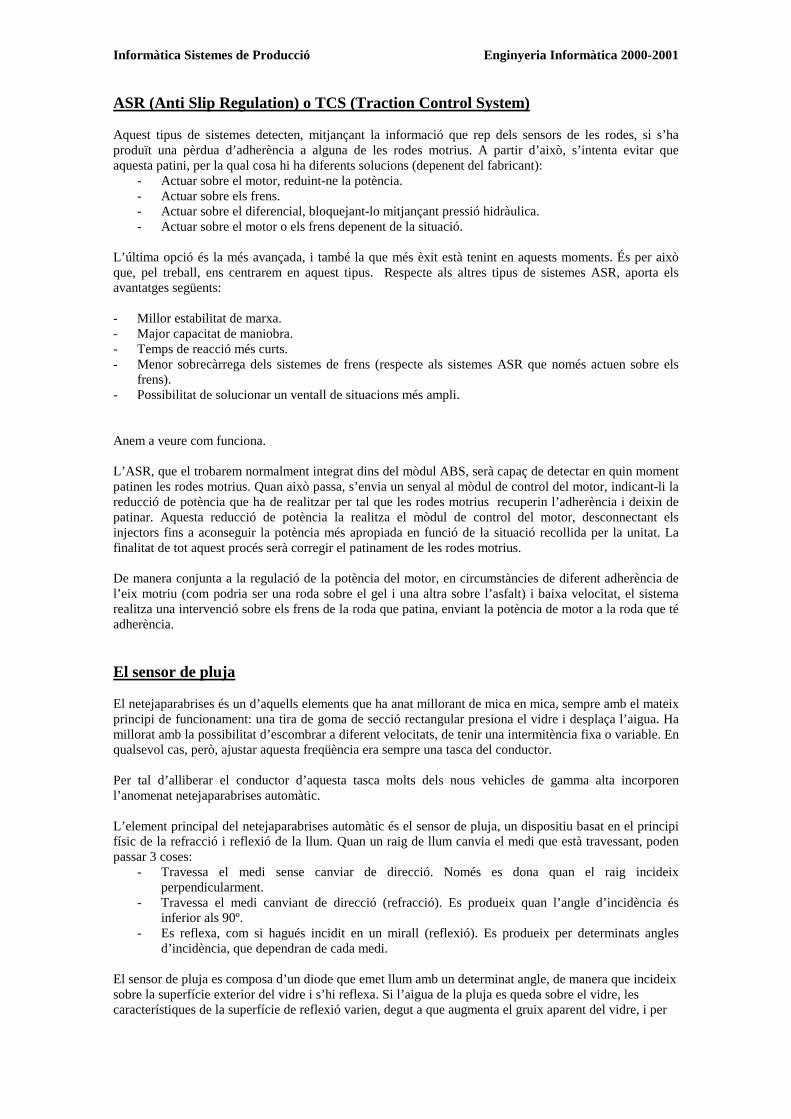
El sensor de pluja es composa d’un diode que emet llum amb un determinat angle, de manera que incideix sobre la superfície exterior del vidre i s’hi reflexa. Si l’aigua de la pluja es queda sobre el vidre, les característiques de la superfície de reflexió varien, degut a que augmenta el gruix aparent del vidre, i per
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
tant només una part del feix de llum és reflexat. Com més aigua hi hagi a la zona, més petita serà la reflexió. El feix de llum reflexat es recull en un diode sensible a la llum. En funció de l llum rebuda, deixarà passar més o menys corrent. D’aquesta manera, i gràcies a un microxip, s’estima la quantitat d’aigua que hi ha a la zona estudiada, que s’agafa com una mostra representativa de tot el parabrises. I en funció de l’aigua detectada, el microxip enviarà les ordres corresponents per fer funcionar el netejaparabrises amb major o menor velocitat o, fins i tot, tancar les finestres i el sostre solar (si n’hi ha). El sistema també pot controlar altres aspectes que condicionen el netejaparabrises:
- Velocitat del cotxe: a més velocitat del cotxe, major velocitat del netejaparabrises. - Nit/Dia: a la nit, i per la mateixa quantitat d’aigua, els netejaparabrises hauran de funcionar a
major velocitat. Per aconseguir-ho, s’utilitzen sensors de llum ambiental. Veiem gràficament els elements necessaris per automatitzar el netejaparabrises:
Sistema de Suspensió Intel·ligent A l’hora d’escollir uns amortidors per u cotxe, sempre hi ha hagut un compromís entre confort i prestacions. Així, un amortidor pot ser massa dur, per tal d’obtenir el màxim rendiment del vehicle, o massa tou, amb la finalitat d’aconseguir un major confort. Per tal de solucionar aquest problema s’han desenvolupat els anomenats sistemes de suspensió intel·ligent o adaptable, que per la seva dependència de l’electrònica hem decidit incloure en aquest treball. Aquests sistemes consten d’una unitat electrònica de control, amortidors de duresa variable mitjançant electrovàlvules i un conjunt de sensors. Aquests sensors informen de:
- velocitat del vehicle. - posició del volant. - acceleració del vehicle. - alçada de la carrosseria.
Segons les dades rebudes, la unitat envia senyals a les electrovàlvules, situades en els amortidors, de manera que canvien les seves característiques de duresa immediatament, segons la situació de marxa actual i la prevista.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Quan la electrovàlvula està oberta, permet el pas de l’oli de l’amortidor per un canal addicional, aconseguint una suspensió més tova. Al tancar-se, tanca el pas addicional d’oli, de manera que la suspensió es fa més dura. Deixant de banda aquestes particularitats, el principi de funcionament de l’amortidor és el mateix dels convencionals. En molts d’aquests sistemes, el conductor pot seleccionar la posició més dura (esportiva) constantment o deixar el sistema en mode automàtic. Sensors d’aparcament Aquest sistema de moment només el trobem disponible a vehicles de gamma alta, i es tracta d’un sistema per conèixer la proximitat del vehicle del darrera a l’hora d’aparcar. Aquest sistema pot arribar a ser força útil per evitar petits xocs amb bicicletes, motos, vehicles o altres objectes que hi puguin haver en els llocs on aparquem S’utilitza un conjunt de sensors (normalment 4) situats a la part del darrera del cotxe. Amb aquests sensors, s’aconsegueix un camp de visió amb una amplada que va des de la carretera fins al maleter i que arriba fins a 1,5 metres de distància. Quan el cotxe es mou en marxa enrera a menys de 5 km/h, els sensors envien senyals als mòdul de control electrònic per tal d’establir la posició de possibles objectes situats a poca distància de la part del darrera del cotxe. El mòdul de control, mitjançant una triangulació, determina la distància de l’objecte i avisa al conductor a través de senyals acústiques i visuals. El temps que transcorrerà entre la detecció de l’objecte i l’avís al conductor serà proper als 300 milisegons. Pel que fa als avisos al conductor, aquests podran variar depenent del fabricant del sistema. Per exemplificar-ho, agafarem com a exemple el sistema de Cadillac. Anem-ho a veure: 1.- El conductor posa la marxa enrera. Un LED visible pel conductor parpelleja un cop. 2.- Es detecta un objecte a menys de 1,5 metres del paraxocs del darrera. S’encén un LED de color taronja. S’emet una senyal acústica. 3.- La distància cap a l’objecte es va reduint. S’encén un segon LED de color taronja. Es mantenen els dos encesos. 4.- L’objecte es troba a una distància entre 1 i 0,5 metres. S’encén un tercer LED, ara de color vermell. Es mantenen tots tres encesos. S’emet contínuament una senyal acústica de dos tons. 5.- L’objecte es troba a menys de 0,5 metres. Els tres LEDS comencen a parpellejar. La senyal acústica continua. El sistema de Cadillac incorpora també un sistema d’autodiagnosi. Quan detecta un bloqueig dels sensor (per exemple després d’una nevada) s’encén un LED de color vermell de forma intermitent. D’aquesta manera, el conductor se’n podrà adonar i solucionar el problema.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
PART 2: BUSOS. Tecnologia del multiplexat : el cablejat elèctric del futur El propòsit del multiplexat és substituir el nombrós cable que composa una instal·lació elèctrica de l’automòbil per un sistema molt més econòmic, simple i infal·lible. Això és possible gràcies a la informàtica i a l’arquitectura dels ordinadors que són la clau pel desenvolupament de les connexions a través d’un sistema multiplexat. L’electrònica juga un paper molt important en l’automòbil; aquest paper augmentarà cada cop més perquè el número de dispositius electrònics que incorpora un vehicle s’incrementa dia a dia. Les avantatges de la introducció de l’electrònica en l’automòbil ha permès la substitució d’un bon nombre de sistemes mecànics fent possible la introducció de sistemes de control més complexes, complets i precisos. A mesura que es van utilitzant elements d’aquests tipus, sorgeixin, tant per part de fabricants, subministradors o usuaris, noves demandes per unitats de control electrònic. Unitats de control electrònic i problemes amb els cables Inicialment, molts dels fabricants de components i equips electrònics per l’automòbil, dissenyaven i distribuïen les Unitats de Control Electrònic com elements autònoms. Cada unitat d’aquest tipus es cableja independentment del joc de sensors i actuadors que té associat, no existint cap tipus de connexió entre unitats. Per altra banda, s’ha comprovat que la causa principal de fallides en l’electrònica de l’automòbil té el seu origen en el cablejat entre unitats de control, sensors i actuadors : les estadístiques parlen de més d’un 50% d’avaries d’aquest tipus. La clau d’aquest fet no està en la qualitat del cablejat sinó en l’elevat nombre de connexions que fan que la fiabilitat total es ressenteixi. La solució que es proposa és una reducció i millor distribució del cablejat. D’aquesta manera també es reduirà el temps de muntatge, millorarà la fiabilitat dels sistemes electrònics, facilitarà el manteniment i tot el que això comporta. Aquest sistema complet que integra i comunica unitats de control amb sensors i actuadors d’una manera més eficient i fiable es coneix com a bus digital de comunicacions tipus multiplexat. Aquest sistema permet la transferència d’informació entre unitats de control i permet incorporar requisits per treballar en temps real, aconseguint temps de resposta de l’ordre de varis milisegons. Aquest és el millor medi per la interconnexió dels diferents elements electrònics d’un automòbil. En definitiva, els bussos multiplexats són sistemes de comunicacions digitals de baix cost on els elements connectats comparteixen una mateixa línia (bus) per on intercanvien dades i senyals de control. Avantatges del multiplexat El sistema del multiplexat requereix d’un protocol de comunicació o llenguatge. Les normes de transmissió creades fins ara es bases en Bussos de comunicació classificats en tres nivells o categories segons el grau necessari de fiabilitat, rapidesa i complexitat.
1. Primer nivell � agrupa les funcions d’il·luminació, tancament de portes o vidres. 2. Segon nivell � equips d’instrumentació i indicadors.
3. Tercer nivell � funcions de control en temps real de dispositius com poden ser gestió
electrònica del motor, alimentació, encesa, antibloqueig de frens o suspensió activa.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
La incorporació en un automòbil del sistema de Bus multiplexat provoca les següents avantatges: � Evita la instal·lació redundant de sensors. Els valors mesurats per alguns sensors, com pot ser la temperatura, poden ser compartits per vàries unitats de control a través del Bus. D’aquesta manera la instal·lació múltiple de sensors és innecessària. Els sensors i actuadors es cablegen a la unitat de control més pròxima, accedint a ells la resta d’unitats a través del Bus. Amb aquest pas ja s’ha estalviat cablejat. � Possibilita la coordinació i cooperació entre unitats de control. S’eviten els problemes d’operar en diferents unitats de control i generar conflictes d’operacions entre elles quan actuen sobre un mateix paràmetre de funcionament. � Facilita la feina de diagnòstic : un dispositiu extern es pot connectar al Bus i amb una lògica adequada es pot obtenir de manera simple i immediata tot tipus d’informació sobre l’estat de funcionament del vehicle. Aquest aspecte és útil tant pel manteniment com pel control de la qualitat. A més a més, alguns test de diagnòstic poden anar incorporats en una unitat de control interna al vehicle mostrant els resultats al conductor mitjançant indicadors. La idea bàsica d’aquest sistema és que amb un sol cable, sigui possible enviar i rebre senyals digitals (impulsos elèctrics) capaços d’activar a distància un actuador. La diferència principal entre la disposició dels cables en un vehicle amb cablejat tradicional i un altra amb sistema multiplexat, és la reducció de cables abaratint costos i disminuint les possibilitats d’avaries elèctriques. Aplicacions del sistema multiplexat Les aplicacions actuals i futures dels Bussos multiplexats són molt diverses; es pot arribar a afirmar que qualsevol element electrònic de l’automòbil és susceptible de ser connectat a un sistema multiplexat. La configuració típica d’un vehicle multiplexat pot consistir en una unitat central dotada d’un display i de teclat que faci les vegades de consola del vehicle. En aquesta unitat central, es connectarien diferents Bussos amb unes característiques de velocitat d’acord amb els requisits de temps real dels elements connectats. Per exemple, els elements electrònics de confort i carrosseria aniran connectats a Bussos de menor velocitat, mentre que els elements que afecten directament a la conducció (tracció i seguretat), així com els d’informació i comunicació aniran connectats a Bussos d’alta velocitat perquè els temps de resposta són més exigents. Tecnologies bàsiques de multiplexat El multiplexat de dades en automòbils va ser introduït per primera vegada per General Motors l’any 1979 aplicat als sistemes de gestió de motor. Des d’aquesta data, s’han desenvolupat molts protocols propis dins de la indústria de l’automòbil. Des del primer moment de la seva creació va ser necessari crear els protocols de comunicació. D’aquests protocols inicials que van començar sent un esforç de marques concretes han arribat a convertir-se en estàndards industrials. Aquestes tecnologies representen els estàndards bàsics de multiplexat amb més acceptació entre els fabricants i amb més possibilitats d’aplicació futura. Entre aquestes tecnologies cal destacar : CAN, VAN i SAE-J1850. BUS CAN Segons la norma internacional (ISO11898) Controller Area Network (CAN) va ser inicialment desenvolupat per l’empresa Bosch a mitjans de l’any 80 per l’aplicació en automòbils per reduir cablejat en els automòbils. En la zona del motor, es produeixen una gran quantitat d’interferències electromagnètiques degudes a l’encesa i al funcionament de la dinamo. És per aquest motiu que es dóna molta importància a aconseguir un bon nivell de seguretat en la transmissió. Avui en dia, gairebé no hi ha cap fabricant de cotxes que no incorpori CAN als vehicles que fabrica. Els motius d’això són perquè és un
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
bus que destaca per la seva immunitat a les interferències elèctriques i una gran fiabilitat en la detecció d’errors. Aquest sistema s’ha propagat de manera ràpida en nombroses aplicacions industrials, degut al seu cost raonable, el fàcil ús i la seguretat de funcionament sota difícils condicions elèctriques. Alguna de les utilitzacions que té són les següents:
- els materials tèxtils són produïts amb màquines controlades per CAN - periòdics i llibres són impresos, plegats i enquadernats per màquines connectades amb CAN - les xarxes CAN són instal·lades en transbordadors, trens, metres i aeroports. - ...
Abans d’entrar a aprofundir en el protocol podríem dir que el protocol CAN està considerat com un sistema basat en comandes; es pot entendre com una extensió d’un sistema centralitzat, on múltiples nodes controladors treballen sobra una xarxa comuna i cada un obliga al comportament de l’altre gràcies a una llista d’ordres. Característiques principals de l’estàndard
• El bus Can és un bus de comunicació asíncron sèrie que especifica 3 capes : capa física, capa de transferència, capa objecte
• La capa física utilitza transmissió diferencial amb parells trenats. • El control d’accés al bus es realitza pel mètode de bit dominant i bit recessiu. Així quan dos
dispositius es disposen a fer del bus alhora, ho aconseguirà el que tingui l’identificador de més prioritat. Això implica que tots els nodes han d’estar constantment motoritzant el bus.
• Els missatges són curts, de fins a 8 bits. • Utilitza una suma CRC de redundància, com a mètode de detecció d’errors. • El missatges no duen una adreça de manera implícita; cada missatge du un identificador que
serveis per dir la prioritat del missatge al bus, i també com a identificador del contingut del missatge.
• Quan es detecta un error en una trama, pot ser comunicat abans que s’acabi la transmissió i no requereix una trama addicional; a més a més, l’error pot ser detectat i comunicat per qualsevol estació
• Hi ha mètodes efectius per aïllar estacions que funcionen malament al bus. • La velocitat és de fins a 1 Mbit/s.
Estructura de capes
1. CAPA OBJECTE � ofereix els serveis a les capes superiors i s’encarrega de decidir quins missatges ha de passar entres les dues capes que comunica. S’encarrega del filtrat de missatges, de la manipulació d’aquests i del seu estat.
2. CAPA DE TRANSFERÈNCIA � nucli del protocol CAN. S’encarrega de presentar els
missatges rebuts a la capa objecte per a ser transmesos. Es responsabilitza de la sincronització, de l’entramat, de l’arbitratge, ... Les seves funcions principals són la detecció i senyalització d’errors, la validació de missatges, controlar la velocitat de transferència, ...
3. CAPA FÍSICA � és la capa que defineix com són transmesos els senyals. És la capa
corresponent al nivell del senyal i representació a nivell de bit. També defineix tot el referent al medi de transmissió. En el cas del protocol CAN el medi de transmissió és la fibra òptica i s’aconsegueix una velocitat de transferència de 1Mb/s.
Per complir la norma ISO, els dispositius han de ser capaços de treballar a 1 Mbit/s per distàncies de fins a 40 metres per disminuir linealment fins a 125Kbits/s en distàncies fins a 500 metres.

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Trames El protocol CAN especifica 4 tipus de trames:
♦ Trama de dades
Aquesta trama és la més comuna i està composada pels següents camps:
- Inici de trama � quan el bus està lliure, o després de finalitzar una trama, l’estat és recessiu; llavors amb un sol bit es marca l’inici d’una trama.
- Camp d’arbitratge � serveix per identificar el missatge i per determinar la prioritat per quan
dos missatges lluiten per accedir al bus. També s’inclou un bit anomenat RTR el funcionament del qual s’explica més endavant. Bàsicament és un bit per diferenciar una trama de dades i una trama de sol·licitud de dades.
- Camp de control � té 4 bits que serveixen per marcar la longitud del camp de dades (DLC –
Data Length Code). Inclou dos bits reservat per futures ampliacions.
- Camp de dades � sempre serà d’una longitud sencera de bytes, entre zero i 8 bytes són admesos, segons el que marqui el DLC.
- Camp CRC � s’inclou la seqüència CRC de la trama més un bit final per indicar el final
d’aquesta trama. En aquest protocol s’utilitza el següent polinomi per calcular el CRC: x15 + x14 + x10 + x8 + x7 + x4 + x3 + 1
- Acknowledge � si una estació rep el missatge correctament generarà un primer bit per
confirmar la trama i un segon bit per indicar el final del camp de confirmació o acknowledge.
- Final de trama � format per 7 bits.
♦ Trama remota Aquesta trama es fa servir per indicar-li a un node que comenci a enviar trames de dades. El format de la trama remota és igual que el de la trama de dades, explicat amb anterioritat; l’única diferència que hi ha és la següent:
- No hi haurà camp de dades. - El bit RTR estarà a 1 � en el cas de la trama de dades aquest bit sempre estarà a 0. Amb
això s’aconsegueix que si una estació A sol·licita d’una estació B una dada justament en el moment que l’estació B vol donar una dada al bus, l’estació B tindrà prioritat perquè tindrà el bit RTR a 0. L’objectiu d’aquest muntatge es que sempre té prioritat el fet que una estació vulgui entregar al bus una dada.
♦ Trama d’error Les trames d’error són enviades per qualsevol node que detecti un error encara que no sigui el node al que va dirigit el missatge. Quan el transmissor detecta una trama d’error torna a enviar les dades. El format d’aquesta trama és el següent: està formada per dos camps més un delimitador de 8 bits. El primer camp és de 6 bits amb nivell 1 i el segon amb 6 bits amb nivell 0.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
♦ Trama de saturació Aquestes trames tenen l’objectiu d’indicar que el receptor està ocupat i no pot rebre cap altra trama. Tècnica del multicast En un bus CAN és segueix l’estratègia següent : totes les estacions estan contínuament motoritzant el bus; quan llegeixen un missatge que porta un identificador per al que estan programades, llavors accepten el missatge. En el bus CAN, els missatges no porten l’adreça de cap estació, sinó un identificador del missatge. Són les estacions, les encarregades d’acceptar o no el missatge. Tècnica de l’arbitratge Aquesta tècnica serveix per indicar una mena d’acord per saber qui pot utilitzar el bus per a tasques de transmissió de dades. Si s’aconsegueix una bona tècnica d’arbitratge, llavors es pot arribar a optimitzar la utilització del bus. En primer lloc, qualsevol controlador CAN pot iniciar una transmissió quan el bus té un estat inactiu. En aquest moment d’iniciar la transmissió, es pot donar el cas que més d’un controlador ho faci a l’hora. Aquest cas és el que provoca conflictes i fa que entri en joc la tècnica de l’arbitratge. L’arbitratge es fa durant la transmissió del camp d’arbitratge de la trama de dades. Quan s’ha enviat tot el camp només quedarà un node transmetent pel bus. Si un node detecta un missatge de trama de dada amb el bit d’arbitratge amb més prioritat que el que ell està transmetent, immediatament, deixa de transmetre i passa a ser node receptor en espera d’enviar el missatge en una altra ocasió. En aquest protocol i amb aquesta tècnica d’arbitratge, existeix la limitació que mai dos nodes puguin enviar missatges amb el mateix camp d’arbitratge; aquesta situació provocaria conflictes destructius. D’aquesta manera no hi ha destrucció de paquets ni retards per esperes de torn; això fa que augmenti l’eficiència limitant la velocitat exclusivament a la capacitat del bus. Estàndard CAN vs Extended CAN Als inicis del protocol CAN es defineix un identificador de 11 bits. Més tard, degut a la demana dels usuaris, es presenta una extensió del protocol que permet identificadors de 29 bits. Aquesta versió del protocol s’anomena Extended CAN. Per diferencia si s’està utilitzant l’estàndard o l’estès, en el camp del control hi ha un bit reservat per diferenciar els dos formats. Els estàndards s’anomenen de la següent manera:
- 2.0 A � només treballa amb identificadors de 11 bits. - 2.0 B � pot treballar amb identificadors de 11 i de 29 bits. - 2.0 B actiu � envia i rep els dos tipus de trames. La majoria dels xips del mercat treballen
amb aquest estàndard. - 2.0 B passiu � només treballa amb identificadors de 11 bits; les trames esteses les elimina i
no li provoquen cap mena de conflicte.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Implementacions Els dispositius CAN estan generalment format per dos blocs : un d’ells és el controlador del protocol i el segon és una memòria buffer separat en dos segments, un de control i un altre de dades a les que accedeix un microcontrolador. El segment de control, el microcontrolador escriu comandes i llegeix registres d’estat. En el de dades, el microcontrolador obté el contingut del missatge. El tipus de buffer utilitzat dóna lloc a dues implementacions diferents:
1. BASIC CAN � el dispositiu té un buffer doble de recepció i un de transmissió, així com registres de màscara que permeten filtrar identificadors per si es dóna el cas que s’ha d’interrompre altres tasques per gestionar l’arribada de nous missatges. Aquest model disposa d’una cua de missatges tipus FIFO on els missatges no surten per prioritat del missatge sinó per ordre d’arribada a la cua.
2. FULL CAN � pot gestionar a l’hora varis objectes CN i altres funcions addicionals com filtrat
de missatges, alliberant la càrrega sobre el microcontroladors. Es permet l’accés a la cua de missatges pendents per part del programadors; amb aquest model és possible evitar que un missatge de menys prioritat passi per davant d’un de més prioritat.
FUNCIONS ELÈCTRIQUES I ELECTRÒNIQUES QUE PONEN FUNCIONAR EN UN SISTEMA CONECTAT A BUS MULTIPLEXAT
Amperímetre Antena automàtica Antirobatori Obertura sense claus Autoràdio Tancaments automàtics Cinturons de seguretat Climatització Neteja vidres Control de llums interiors Control de tracció Control de transmissió Control electrònic del motor Desbloqueig remot de l’obertura i tancament del maleter Desbloqueig remot de la tapa del dipòsit de gasolina Llums d’avís Entrada il·luminada
Mirall retrovisor Miralls automàtics Fars automàtics Frens Frens antibloqueig Grup d’instruments Indicadors de canvi de direcció Intermitents Líquid del parabrises Llums del vehicles Llums exteriors Termòmetre i brúixola Ordenador de a bord Indicador de porta o maleter oberts Reglatge de les làmpares Sistema antivaho pel mirall Sistema antivaho per la finestra posterior Suspensió pneumàtics Finestres automàtiques
Conclusió final Com a conclusió final, podríem dir que CAN es pot entendre com un bus d’alta velocitat i baix nivell d’errors que s’ha introduït en la indústria de l’automòbil i camions europeus, però amb un elevat cost d’implementació.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
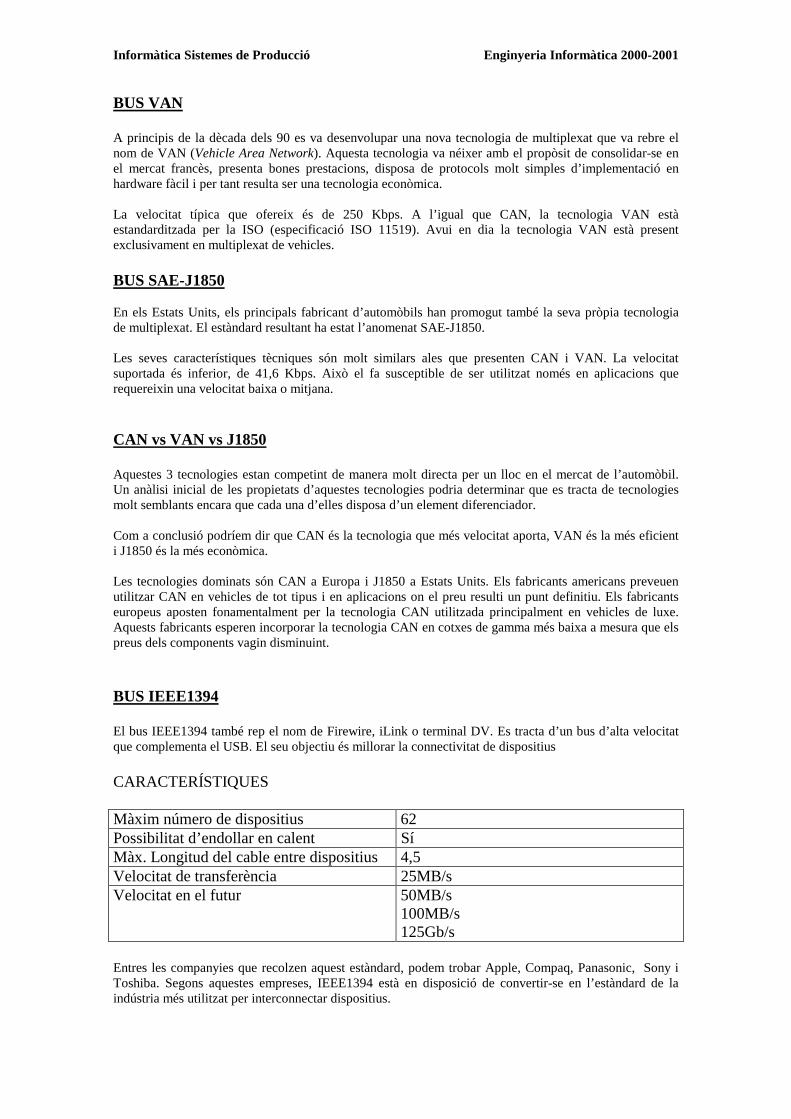
BUS VAN A principis de la dècada dels 90 es va desenvolupar una nova tecnologia de multiplexat que va rebre el nom de VAN (Vehicle Area Network). Aquesta tecnologia va néixer amb el propòsit de consolidar-se en el mercat francès, presenta bones prestacions, disposa de protocols molt simples d’implementació en hardware fàcil i per tant resulta ser una tecnologia econòmica. La velocitat típica que ofereix és de 250 Kbps. A l’igual que CAN, la tecnologia VAN està estandarditzada per la ISO (especificació ISO 11519). Avui en dia la tecnologia VAN està present exclusivament en multiplexat de vehicles. BUS SAE-J1850 En els Estats Units, els principals fabricant d’automòbils han promogut també la seva pròpia tecnologia de multiplexat. El estàndard resultant ha estat l’anomenat SAE-J1850. Les seves característiques tècniques són molt similars ales que presenten CAN i VAN. La velocitat suportada és inferior, de 41,6 Kbps. Això el fa susceptible de ser utilitzat només en aplicacions que requereixin una velocitat baixa o mitjana. CAN vs VAN vs J1850 Aquestes 3 tecnologies estan competint de manera molt directa per un lloc en el mercat de l’automòbil. Un anàlisi inicial de les propietats d’aquestes tecnologies podria determinar que es tracta de tecnologies molt semblants encara que cada una d’elles disposa d’un element diferenciador. Com a conclusió podríem dir que CAN és la tecnologia que més velocitat aporta, VAN és la més eficient i J1850 és la més econòmica. Les tecnologies dominats són CAN a Europa i J1850 a Estats Units. Els fabricants americans preveuen utilitzar CAN en vehicles de tot tipus i en aplicacions on el preu resulti un punt definitiu. Els fabricants europeus aposten fonamentalment per la tecnologia CAN utilitzada principalment en vehicles de luxe. Aquests fabricants esperen incorporar la tecnologia CAN en cotxes de gamma més baixa a mesura que els preus dels components vagin disminuint. BUS IEEE1394 El bus IEEE1394 també rep el nom de Firewire, iLink o terminal DV. Es tracta d’un bus d’alta velocitat que complementa el USB. El seu objectiu és millorar la connectivitat de dispositius CARACTERÍSTIQUES Màxim número de dispositius 62 Possibilitat d’endollar en calent Sí Màx. Longitud del cable entre dispositius 4,5 Velocitat de transferència 25MB/s Velocitat en el futur 50MB/s
100MB/s 125Gb/s
Entres les companyies que recolzen aquest estàndard, podem trobar Apple, Compaq, Panasonic, Sony i Toshiba. Segons aquestes empreses, IEEE1394 està en disposició de convertir-se en l’estàndard de la indústria més utilitzat per interconnectar dispositius.
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
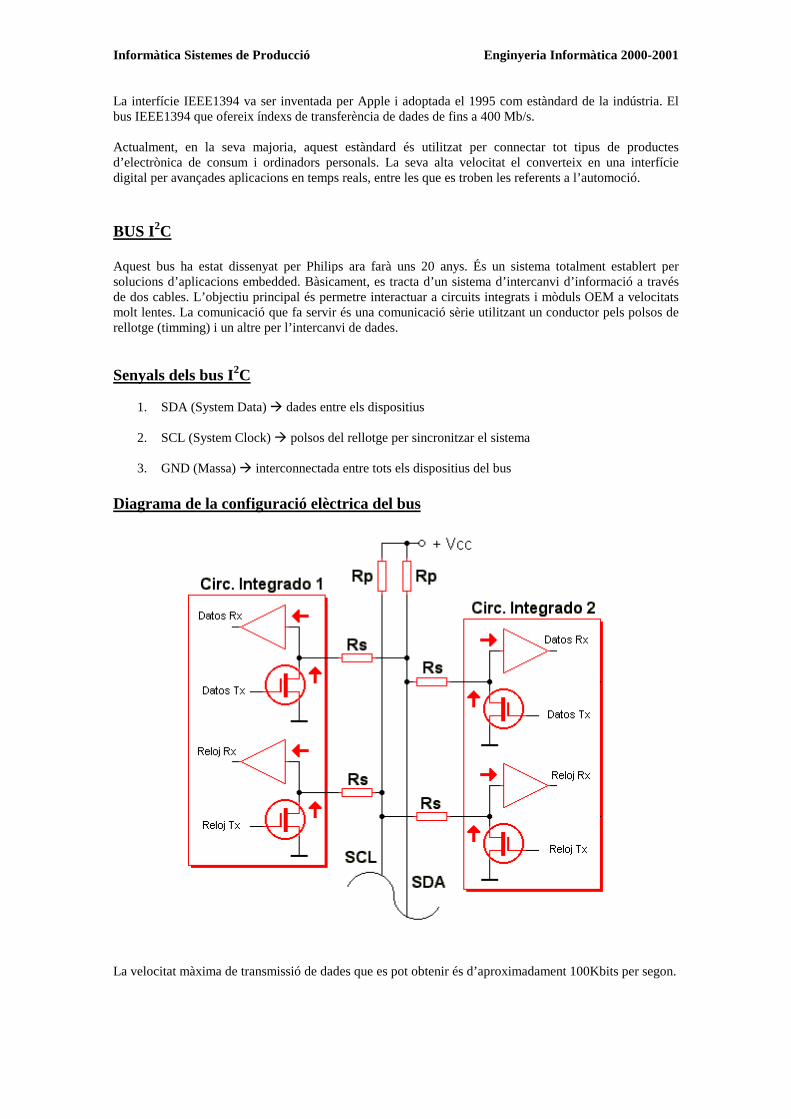
La interfície IEEE1394 va ser inventada per Apple i adoptada el 1995 com estàndard de la indústria. El bus IEEE1394 que ofereix índexs de transferència de dades de fins a 400 Mb/s. Actualment, en la seva majoria, aquest estàndard és utilitzat per connectar tot tipus de productes d’electrònica de consum i ordinadors personals. La seva alta velocitat el converteix en una interfície digital per avançades aplicacions en temps reals, entre les que es troben les referents a l’automoció. BUS I2C Aquest bus ha estat dissenyat per Philips ara farà uns 20 anys. És un sistema totalment establert per solucions d’aplicacions embedded. Bàsicament, es tracta d’un sistema d’intercanvi d’informació a través de dos cables. L’objectiu principal és permetre interactuar a circuits integrats i mòduls OEM a velocitats molt lentes. La comunicació que fa servir és una comunicació sèrie utilitzant un conductor pels polsos de rellotge (timming) i un altre per l’intercanvi de dades. Senyals dels bus I2C
1. SDA (System Data) � dades entre els dispositius 2. SCL (System Clock) � polsos del rellotge per sincronitzar el sistema
3. GND (Massa) � interconnectada entre tots els dispositius del bus
Diagrama de la configuració elèctrica del bus
La velocitat màxima de transmissió de dades que es pot obtenir és d’aproximadament 100Kbits per segon.

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Dispositius
• Master � hi ha un sol dispositius master que determina la temporització i l’adreça del tràfic de dades en el bus. És l’únic dispositiu que aplica polses de rellotge en la línia SCL. Es poden connectar varis dispositius master a un mateix bus (configuració multi-master).
• Slave � aquests dispositius no són capaços de generar polses de rellotge. Només reben senyals
d’ordres i de rellotge dels dispositius master. Estat del bus
• Bus lliure � és l’estat en que les línies SDA i SCL estan inactives. En aquest moment és quan un dispositiu master pot començar a utilitzar el bus.
• Start � un dispositiu master ocupa el bus.
• Stop � un dispositiu master deixa lliure el bus.
Les condicions start i stop són condicions generades per dispositius master. El bus es considera ocupat després de la condició start. El bus tornarà a estar lliure un cop hagi passat la condició stop. Característiques del bus
• Format de dades � la transmissió de dades a través del bus es fa amb un format de 8 bits (1 byte). A cada byte li segueix un novè pols de rellotge durant el qual el dispositiu receptor del byte ha de generar un pols de reconeixement (Acknowledge).
• Adreça � cada dispositiu del bus disposa de la seva pròpia adreça. És una adreça única que ve
establerta pel fabricant.
• Lectura – Escriptura � cada dispositiu disposa d’una adreça de 7 bits. El bit octau enviat durant l’operació d’adreçament correspon al bit que indica el tipus d’operació a realitzar. Si aquest bit és alt el dispositiu master llegeix informació provinent d’un dispositiu esclau; en canvi, si aquest bit és baix, el dispositiu master escriu informació en un dispositiu esclau.
• Sincronització � tots els dispositius master generen el seu propi rellotge en la línea SCL per
transferir missatges pel bus. Les dades només són vàlides sempre i quan el polse de rellotge estigui activat.
SDA
SCL
Condició START
Condició STOP

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Protocol del bus Per iniciar una comunicació entre dispositius connectats al bus I2C s’ha de respectar un protocol. Quant el bus està lliure, un dispositiu master el pot ocupar generant una condició de start. El primer byte transmet després de la condició de start conté els set bits que indiquen l’adreça del dispositiu destí i un octau bit corresponent a l’operació que es vol ver (lectura o escriptura). Si l’adreça apunta pels set bits correspon a un dispositiu present en el bus, aquest respon enviant un acknowledge. A continuació, ja es pot començar el intercanvi d’informació entre els dispositius. El dispositiu master va enviant dades al dispositiu esclau fins que deixa de rebre els polses d’acknowledge o fins que s’hagin acabat de transmetre totes les dades. El dispositiu master pot deixar lliure el bus generant una condició de stop. Si es vol continuar transmetent, el dispositiu master pot generar una altre condició de start en comptes d’una condició de stop. Aquesta nova condició de start es sol anomenar “inici repetitiu” i es sol utilitzar per adreçar un dispositiu esclau diferent. Es tracta d’un multi-master bus perquè més d’un dispositiu amb capacitat de controlar el bus pot ser connectat. Com a dispositius master solen ser microcontroladors , es pot donar el cas de una transmissió de dades entre dos microcontroladors connectats al bus. La possibilitat de connectar més d’un dispositiu significa que més d’un dispositiu master podria intentar iniciar una transferència de dades al mateix temps. Per evitar el caos que produiria aquest fet s’inclou detecció de col·lisions i és capaç de prevenir corrupció de dades si dos o més masters inicien la transferència de dades simultàniament. Conclusions finals Com que no sempre es requereix gran velocitat de transferència de dades, aquest bus és ideal per sistemes on és necessari treballar amb informació entre molts dispositius i, al mateix, temps, es requereix poc espai i línies de circuit imprès. Per això és comú, veure dispositius I2C en sistemes de seguretat i electrònica de l’automòbil.

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
PART3: MICROPROCESSADORS A L’AUTOMÒBIL. Introducció La indústria de l’automòbil ha presentat canvis importants aquests últims anys, ha passat d’una època on el més important era la potencia del vehicle, la velocitat màxima que podia agafar, el temps de 0 a 100km/h, etc. Ara, degut sobretot a un canvi d’actitud en la gent, el que es busca és augmentar la seguretat, el confort, i en general, donar més prestacions i qualitat al vehicle. D’entre les prestacions que s’ofereixen actualment trobem: l’airbag, el Control d’Estabilitat (ESP), Control de Tracció (ASR o TCS), ABS, Sistema de tracció Intel·ligent, Sistema de Navegació amb GPS, Sensor de Pluja, Regulació dels Seients automàtica, etc. Per proporcionar aquestes prestacions és necessari incorporar a l’automòbil tot un conjunt de sistemes electrònics, com per ex. Sensors, microprocessadors, microcontroladors, etc. Aquests han d’estar controlats per un sistema (Unitat de Control) que processi la informació captada per aquests i efectuí les accions necessàries en funció d’aquesta informació. Com per exemple fer que surti l’airbag en cas d’accident. Així doncs dins l’automòbil hi haurà una o més unitats de control amb un o varis processadors (o microcontroladors) que controlaran els diferents sistemes, ESP, ABS, ASR, etc. Segons la implementació podem trobar que una unitat de control gestiona varis sistemes (per ex. ASR i ESP) o bé que cada sistema estigui controlat per unitats de control independents, i fins i tot, si es necessari una unitat central que coordini la resta. Algunes de les empreses dedicades a la fabricació de components electrònics, ja siguin processadors, microcontroladors, sensors, etc. que s'utilitzen en la indústria de l'automòbil són: Alcatel, Bosch, Dallas Semiconductor, Hitachi, Intel, Mitsubishi, Motorola, Philips, Texas Instruments, Toshiba, ... Microprocessador / Microcontrolador La funció principal d’aquest serà processar la informació obtinguda dels diferents dispositius i realitzar les accions necessàries i/o informar a l’usuari de l’estat actual, tal com la velocitat, la quantitat de gasolina que queda i els quilometres que podem fer a la velocitat que circulem, si tenim algun problema en algun dels subsistemes del vehicle, etc. El fet d’integrar tots aquests sistemes electrònics a l’automòbil planteja una problemàtica addicional molt important. Aquests sistemes han de ser fiables i robustos. Si l’aparell que calcula la quantitat de gasolina que ens queda falla no és gaire greu, però si en cas d’accident el sensor de l’airbag no s’activa o el processador falla pot significar la diferencia entre la vida o la mort. Si a més a més, tenim en compte l’entorn on es trobaran aquests sistemes (per ex. prop del motor) i les interferències, altes temperatures, soroll, etc. a que poden ser sotmesos, cal que estiguin preparats per funcionar correctament i sense errors. L’entorn a l’automòbil L’automòbil, com s’ha comentat anteriorment, presenta un entorn extremadament hostil pel sistemes electrònics. D’aquest entorn destaquen les següents parts com les més problemàtiques:
• Temperatures Extremes: de -40º C fins a +85ºC (pot arribar a +125ºC) • Polsos Electromagnètics (EMP) del sistema d’engegada • Les variacions abruptes de voltatge als cables de corrent • Interferències amb les ones de ràdio • Descàrregues Electrostàtiques (ESD) • Soroll
Pel que fa a les temperatures hem d’utilitzar processadors capaços de treballar en aquestes condicions. Trobem diferents classificacions d’aquests segons el rang de temperatures en el que funcionen correctament. Pel cas de l’automoció s’utilitzen els processadors capaços de treballar entre –40ºC i
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
+110ºC. Per altres tipus d’aplicacions el rang varia. La figura següent ens mostra les diferents classificacions.
Temperatura Ambient Classe Mínima Màxima
Comercial 0 70 Industrial -40 +85 Automoció -40 +110 Militar -55 +125
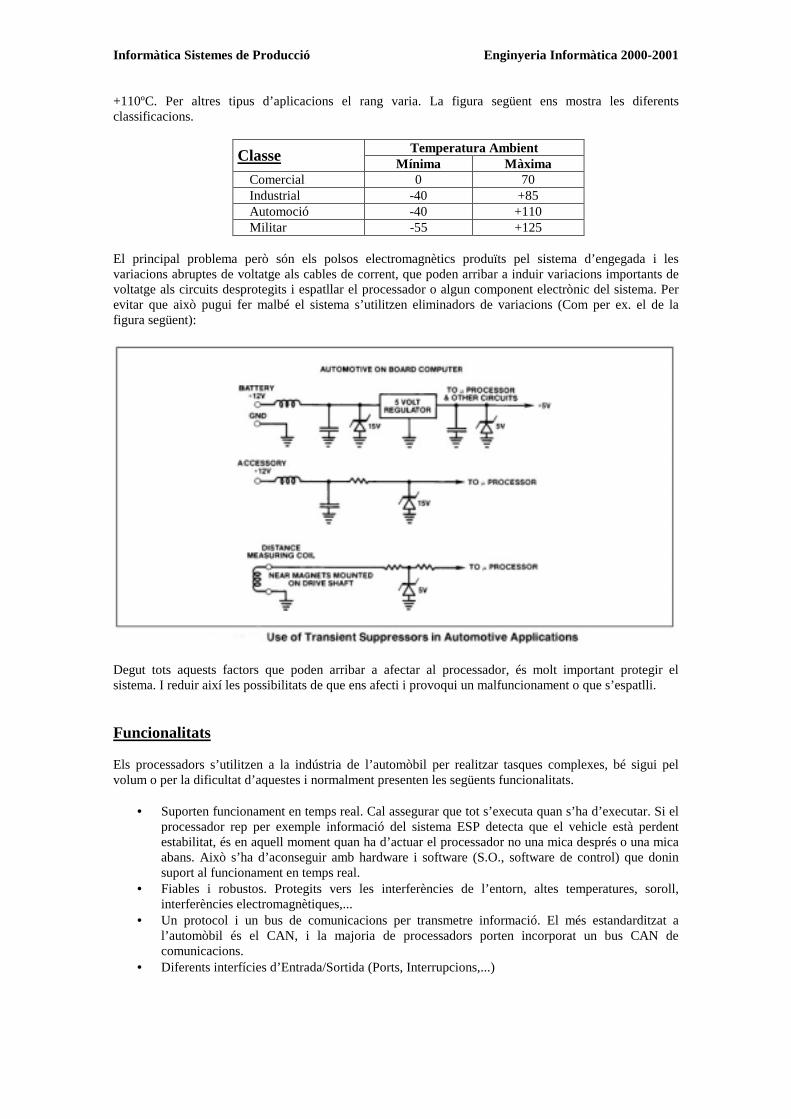
El principal problema però són els polsos electromagnètics produïts pel sistema d’engegada i les variacions abruptes de voltatge als cables de corrent, que poden arribar a induir variacions importants de voltatge als circuits desprotegits i espatllar el processador o algun component electrònic del sistema. Per evitar que això pugui fer malbé el sistema s’utilitzen eliminadors de variacions (Com per ex. el de la figura següent):
Degut tots aquests factors que poden arribar a afectar al processador, és molt important protegir el sistema. I reduir així les possibilitats de que ens afecti i provoqui un malfuncionament o que s’espatlli. Funcionalitats Els processadors s’utilitzen a la indústria de l’automòbil per realitzar tasques complexes, bé sigui pel volum o per la dificultat d’aquestes i normalment presenten les següents funcionalitats.
• Suporten funcionament en temps real. Cal assegurar que tot s’executa quan s’ha d’executar. Si el processador rep per exemple informació del sistema ESP detecta que el vehicle està perdent estabilitat, és en aquell moment quan ha d’actuar el processador no una mica després o una mica abans. Això s’ha d’aconseguir amb hardware i software (S.O., software de control) que donin suport al funcionament en temps real.
• Fiables i robustos. Protegits vers les interferències de l’entorn, altes temperatures, soroll, interferències electromagnètiques,...
• Un protocol i un bus de comunicacions per transmetre informació. El més estandarditzat a l’automòbil és el CAN, i la majoria de processadors porten incorporat un bus CAN de comunicacions.
• Diferents interfícies d’Entrada/Sortida (Ports, Interrupcions,...)
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Característiques Les característiques més habituals d’aquests processadors utilitzats són les següents:
• Són processadors de 8, 16 i 32 bits • Treballen a freqüències de rellotge molt baixes (per ex. 20Mhz) si els comparem amb els
processadors d’un PC actual (900Mhz, 1GHz. ,...) • Incorporen un bus de comunicacions CAN, en el cas de necessitar comunicar-se amb altres
elements. • Són processadors relativament vells, això dona seguretat i fiabilitat, ja que normalment són
processadors que porten molt de temps funcionant a la indústria amb bons resultats. • Diversos ports d’Entrada / Sortida • Port Sèrie • Timers • WatchDog Timer • Incorporen una memòria EPROM d’entre 16 i 512Kb pel codi del programa • Una memòria RAM per dades d’entre 512b i 32Kb
Descripció dels processadors ( Hitachi - SuperH, i Intel 87C196CB) Ara descriurem tres processadors que ha estat utilitzats a la indústria de l’automòbil. Comentarem amb més profunditat el processador SuperH, i després donarem les característiques bàsiques dels altres dos, juntament amb una llista dels diferents processadors utilitzats a l’automoció. Els Processadors Hitachi - SuperH Hitachi ha estat produint microcontroladors per la indústria de l'automòbil des de que es van començar a utilitzar en els cotxes, al principi CPU's de 8 bits fins les actuals de 32 bits. Ara, la seva línia de productes va des dels processadors de baix cost, 8 bits, fins a processadors RISC de 32 bits d'alt rendiment. Els controladors d'Hitachi s'utilitzen en els següents sistemes:
• Dashboards • Sistemes de climatització • ABS i sistemes de control de tracció • Airbags • Els sistemes de canvi de marxes automàtic • Sistemes d'informació al vehicle, navegació, DAB, telefonia mòbil.
La corporació Volvo ha seleccionat el xip SuperH pel sistema de control de la transmissió i l'administració del motor. El processador RISC monitoritza els paràmetres del motor i el sistema del canvi de marxes per maximitzar el funcionament del cotxe, de forma eficient i segura.
L’arquitectura SuperH���� RISC La primera generació de processadors SuperH va sortir a principis de la dècada passada. Actualment hi ha 4 generacions de microcontroladors i microprocessadors disponibles. L’arquitectura bàsica de la cinquena generació de processadors SuperH ja ha estat dissenyada i s’està planificant la sisena i setena generació. Les primeres cinc generacions de l’arquitectura proveeixen compatibilitat entre elles, afegint més funcionalitats a cada nova generació. Tots els processadors SuperH tenen les següents característiques:
• Configuracions optimitzades per aplicacions en sistemes empotrats • Perifèrics dissenyats per proporcionar solucions eficients per sistemes complets amb una relació
cost-efectivitat acceptable. • Codi d’instruccions compatible amb les generacions anteriors

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
• Optimitzats per obtenir gran velocitat de throughput, combinat amb una baixa dissipació que permets empaquetar-ho amb plàstic de baix cost, minimitza els problemes de refredament
• Suporten diversos sistemes operatius per facilitar la màxima versatilitat en el disseny i desenvolupament de software.
• Un gran nombre d’eines de desenvolupament Evolució de l’arquitectura SuperH
Descripció de la sèrie SH-1 Els dispositius a la sèrie SH-1 (8 versions en total) arriben fins als 20 MIPS de rendiment. Són dispositius a 20-MHz que tenen un bus extern de 16/8 bits i 32Mb d’espai d’adreçament. Aquestes versions ofereixen fins a 8KB RAM/64KB ROM, una interfície amb l’SRAM i la DRAM, un MAC de 16 bits, i diversos perifèrics, incloent timers especials per control de motors, canals sèrie, circuits DMA, UBC i d’altres. Descripció de la sèrie SH-2 Els dispositius a la sèrie SH-2 (19 versions en total, incloent 3 a la sèrie de SH-DSP) tenen una cache de 4Kb, un bus extern de 32/16/8 bits i un espai d’adreçament de 128Mb. Els xips de 33/66Mhz, 4Kb de cache i un MAC de 32 bits, proporcionen un rendiment de fins a 78 MIPS. Algunes de les característiques especials d’aquests processadors són: incloure una memòria flash de 512 Kb, timers pel control del motor, un controlador de l’estat del bus i ports CAN 2.0B. Els dispositius SH-DSP són ideals pels sistemes que prèviament necessitaven un processador empotrat i un xip DSP. El sistema consisteix en la combinació d’una CPU RISC de 32 bits i una unitat DSP de 16 bits en un sistema multitasca que utilitza 3 busos, una cache de 4Kb i 16Kb X/Y de RAM per aconseguir un throughput alt. Algunes versions tenen fins a 256Kb de memòria flash integrada en el xip. Descripció de la sèrie SH-3 Els dispositius a la sèrie SH-3 (8 versions en total, inclòs un a la sèrie SH3-DSP) tenen 16Kb de cache, un bus extern de 32/16/8 bits i un espai d’adreçament de 448Mb. Els xips de 133/66Mhz tenen fins a 16Kb de cache, una MMU, un MAC de 32 bits, un barrel shifter, un rellotge real-time i un UBC. Proporcionen nivells de rendiment de fins a 168 MIPS. Característiques especials a les diverses versions d’SH-3

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
inclouen interfícies sèrie, PCMCIA, SmartCard i IrDA, i una interfície sèrie de depuració (SDI) PLL i JTAG. El dispositiu SH3-DSP de 133/66MHz combina una CPU RISC de 32 bits i una unitat DSP de 16 bits. El dispositiu té una estructura de 4 busos, !6Kb de cache i 16Kb d’X/Y RAM. El sistema executa tot el software des d’un flux d’instruccions i pot fer multiplicacions de 16 bits en un sol cicle. El xip pot canviar el seu mode d’operació des dels 173 MIPS del processador RISC als 266 MOPS del DSP (532 MOPS, de pic màxim), o a qualsevol combinació entremig. Descripció de la sèrie SH-4 i ST’s ST40 Els dos dispositius a les sèries SH-4 i ST’s ST40, es basen en dos elements, una arquitectura superescalar i un processador RISC de 32 bits SuperH. Ofereixen 16Kb de cache de dades, 8Kb de cache d’instruccions, un bus extern de 64/32/16/8 bits i un espai d’adreçament de 2Gb. Els xips de 200/167 MHz inclouen una unitat de coma flotant (FPU) amb un processador d 128bits de gràfics vectorials, optimitzat per gràfics 3D i poden processar fins a 7 milions de polígons per segon. També tenen un MAC de 3s bits, MMU, SDRAM I/F, i UBC (User Break Controller), a més d’una extensa capacitat per depuració incorporada al xip. Els SH40 i ST40 aconsegueixen un rendiment de 360 MIPS amb el benchmark Dhrystone 2.1. A la taula següent trobem un resum de les característiques d'aquests processadors.
Resum de les principals característiques dels processadors SuperH

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
La figura següent mostra les aplicacions que s'han fet dels processadors superH.
Aplicacions de la família de processadors SuperH
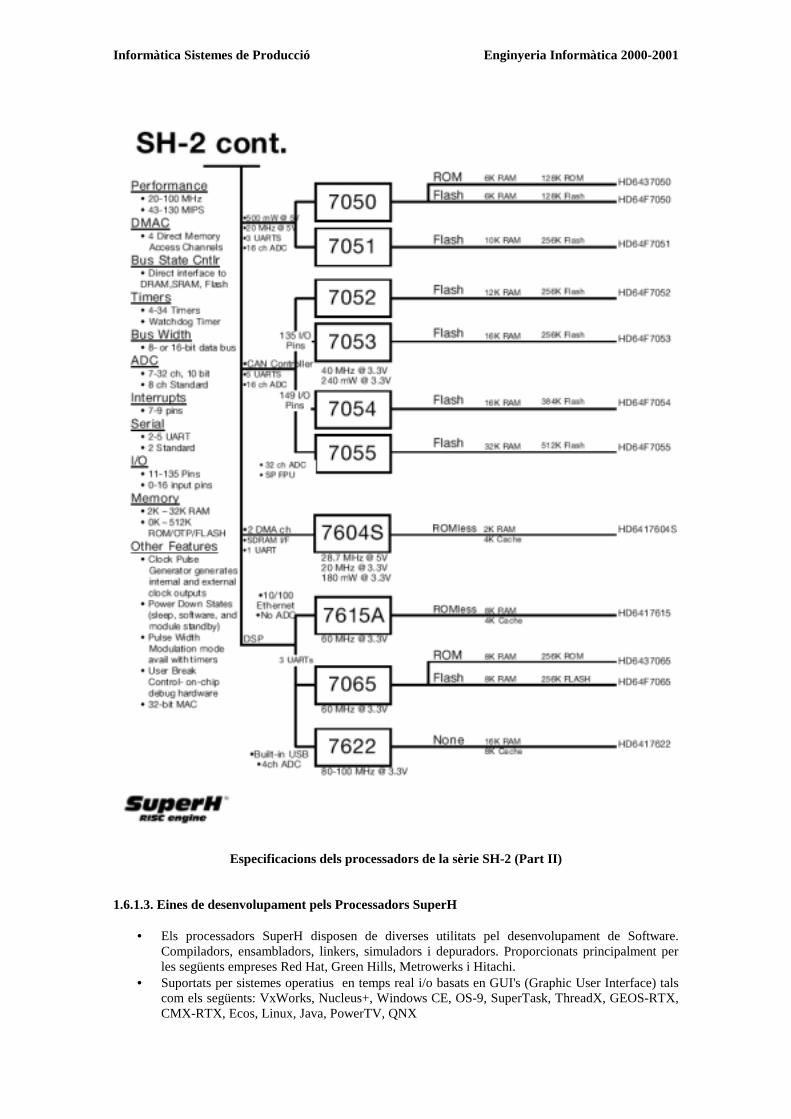
Com es veu a la figura anterior, les aplicacions dels processadors SuperH és molt diversa, i va des de la indústria fins la TV digital. A la indústria de l’automòbil s’utilitza bàsicament la sèrie 2 dels processadors SuperH, ja que, són els processadors que millor s'adapten a les necessitats de la indústria de l'automòbil, per les seves característiques de robustesa i fiabilitat. Les especificacions tècniques d'aquests processadors la veiem en el següent gràfic. On apareixen els diferents processadors de la sèrie amb les seves especificacions.

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Especificacions dels processadors de la sèrie SH-2 (Part I)
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
Especificacions dels processadors de la sèrie SH-2 (Part II) 1.6.1.3. Eines de desenvolupament pels Processadors SuperH
• Els processadors SuperH disposen de diverses utilitats pel desenvolupament de Software. Compiladors, ensambladors, linkers, simuladors i depuradors. Proporcionats principalment per les següents empreses Red Hat, Green Hills, Metrowerks i Hitachi.
• Suportats per sistemes operatius en temps real i/o basats en GUI's (Graphic User Interface) tals com els següents: VxWorks, Nucleus+, Windows CE, OS-9, SuperTask, ThreadX, GEOS-RTX, CMX-RTX, Ecos, Linux, Java, PowerTV, QNX
Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
• Disposen d'eines de desenvolupament hardware per poder provar el sistema implementat:
o Emuladors: HP, Yokagawa, Sophia, Applied Microsystems, Lauderbach, Hitachi, HIS Crossproducts
o Plaques d'avaluació: Densan, Hitachi o Sockets: Yamaichi, Tokyo Electec o Programadors PROM/Flash: Data I/O, Stag, Bytek, BP o Socket Adapters: Tribal Microsystems, Hitachi, Data I/O, BP
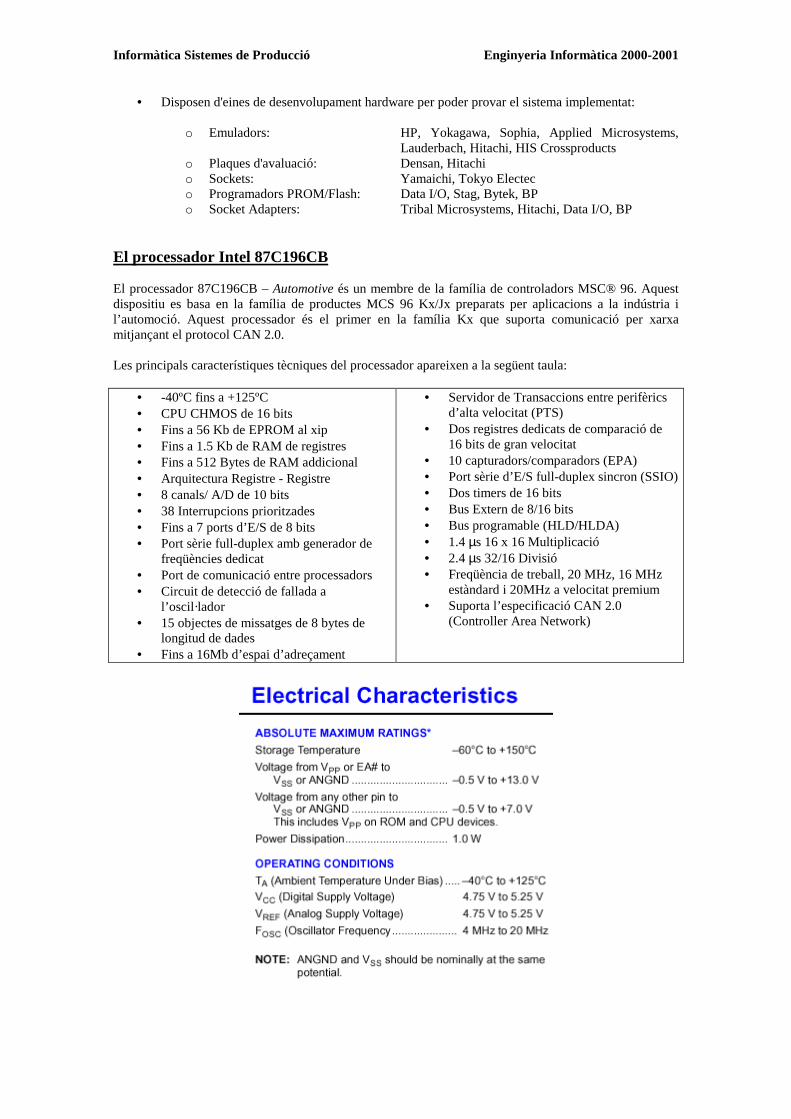
El processador Intel 87C196CB El processador 87C196CB – Automotive és un membre de la família de controladors MSC® 96. Aquest dispositiu es basa en la família de productes MCS 96 Kx/Jx preparats per aplicacions a la indústria i l’automoció. Aquest processador és el primer en la família Kx que suporta comunicació per xarxa mitjançant el protocol CAN 2.0. Les principals característiques tècniques del processador apareixen a la següent taula:
• -40ºC fins a +125ºC • CPU CHMOS de 16 bits • Fins a 56 Kb de EPROM al xip • Fins a 1.5 Kb de RAM de registres • Fins a 512 Bytes de RAM addicional • Arquitectura Registre - Registre • 8 canals/ A/D de 10 bits • 38 Interrupcions prioritzades • Fins a 7 ports d’E/S de 8 bits • Port sèrie full-duplex amb generador de
freqüències dedicat • Port de comunicació entre processadors • Circuit de detecció de fallada a
l’oscil·lador • 15 objectes de missatges de 8 bytes de
longitud de dades • Fins a 16Mb d’espai d’adreçament
• Servidor de Transaccions entre perifèrics d’alta velocitat (PTS)
• Dos registres dedicats de comparació de 16 bits de gran velocitat
• 10 capturadors/comparadors (EPA) • Port sèrie d’E/S full-duplex sincron (SSIO)• Dos timers de 16 bits • Bus Extern de 8/16 bits • Bus programable (HLD/HLDA) • 1.4 µs 16 x 16 Multiplicació • 2.4 µs 32/16 Divisió • Freqüència de treball, 20 MHz, 16 MHz
estàndard i 20MHz a velocitat premium • Suporta l’especificació CAN 2.0
(Controller Area Network)

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
A continuació tenim el diagrama de blocs.
Les característiques dels dos processadors que hem vist són molt semblants, i en general, per tots els processadors utilitzats en l’automoció. La llista següent inclou variïs dels processadors que s’han utilitzat en automoció. A la adreça web http://www.omegas.co.uk/CAN/devices.htm es pot trobar una llista més extensa de processadors utilitzats en automoció.

Informàtica Sistemes de Producció Enginyeria Informàtica 2000-2001
ALGUNES REFERÈNCIES DE LA WEB http://www.kieback-peter.de/spa/tlogica/1100s-05.htm http://www.dinastiasoft.com.ar/Tecnologia/Can.htm http://www.can-cia.de/ http://members.es.tripod.de/InfoE/pterm.htm http://dmasr.hypermart.net/enero/tecnologia.htm http://www.serconet.com/usr/laureanog/HPV1B_31.HTM http://www.tinacria.com/lonworks.htm http://www.terra.es/internet/articulo/html/int1770.htm http://aeec.el.ub.es/~orubies/buscan/can.html http://aeec.el.ub.es/~orubies/ http://www.kvaser.se/can/intro/index.htm http://www.semiconductors.philips.com/ http://www.apple.com/es/pr/q299/990217_alianza.html http://www.terra.es/personal/jecharte/firewire.htm http://www.eltek.com.ar/mainp/hddatos.html


















