Ensayos Del Motor de Induccion Sin Carga y Bajo Carga
41
ENSAYOS DEL MOTOR DE INDUCCION SIN CARGA Y BAJO CARGA Integrantes: Chávez Mary Carmen C.I: 21.353.795 Matos Kelvin C.I: 20.690.627 Muños Luis C.I 17.461.167 Narváez Reinaldo C.I: 19.831.738 Serrano Diego C.I: 19.676.801 Maracaibo, febrero 2013 REPÚBLICA BOLIVARIANA DE VENEZUELA. MINISTERIO DEL PODER POPULAR PARA LA EDUCACION SUPERIOR UNIVERSIDAD DEL ZULIA FACULTAD DE INGENIERÍA ESCUELA DE INGENIERÍA ELÉCTRICA
-
Upload
reinaldonarvaez -
Category
Documents
-
view
23 -
download
1
description
practica de maquinas II
Transcript of Ensayos Del Motor de Induccion Sin Carga y Bajo Carga

ENSAYOS DEL MOTOR DE INDUCCION SIN CARGA Y BAJO CARGA
Integrantes:
Chávez Mary Carmen C.I: 21.353.795
Matos Kelvin C.I: 20.690.627
Muños Luis C.I 17.461.167
Narváez Reinaldo C.I: 19.831.738
Serrano Diego C.I: 19.676.801
Maracaibo, febrero 2013
REPÚBLICA BOLIVARIANA DE VENEZUELA.
MINISTERIO DEL PODER POPULAR PARA LA EDUCACION SUPERIOR
UNIVERSIDAD DEL ZULIA
FACULTAD DE INGENIERÍA
ESCUELA DE INGENIERÍA ELÉCTRICA
CÁTEDRA: LABORATORIO DE MAQUINAS ELECTRICAS II

Resumen
Con la realización de esta práctica de laboratorio, se obtuvieron los parámetros
necesarios para determinar todos los elementos que forman para del circuito equivalente del
Motor de Inducción Trifásico.
Se Realizó tres tipos de ensayo. Estos son: ensayo de rotor libre, rotor bloqueado y
corriente continua Para cada ensayo se debió seguir las consideraciones respectivas para
poder obtener valores lo más aproximados y exactos posibles.
El ensayo de rotor libre debe ser a tensión nominal y el rotor bloqueado a corriente
nominal, asemejándose a los ensayos de los transformadores.
Por medio de herramientas matemáticas y programas como Matlab se pudo separar las
pérdidas mecánicas y del hierro. Para determinar la reactancia del rotor y estator del motor
se tiene en cuenta que tipo de clase es.

Objetivos
Calcular los parámetros del circuito equivalente del motor de inducción trifásico,
partiendo de los ensayos a rotor libre, a rotor bloqueado y con corriente directa.
Determinar experimentalmente las características operacionales del motor de
inducción trifásico jaula de ardilla

Marco teórico
Motor de inducción trifásico.
Las máquinas de inducción trifásicas o asincrónicas, y en particular los motores con
rotor tipo jaula de ardilla, son en la actualidad las máquinas eléctricas de mayor aplicación
industrial (entre el 80% y 90% de los motores industriales son de inducción trifásicos).
Están basados en el accionamiento de una masa metálica por la acción de un campo
giratorio. Están formados por dos armaduras con campos giratorios coaxiales: una fija
(Estator) y una móvil (Rotor).
Principio de funcionamiento y características constructivas del motor de inducción.
El principio de funcionamiento del motor de inducción, consiste en alimentar los tres
enrollados del estator ubicados físicamente a 120º con una fuente trifásica, para producir un
campo magnético rotatorio la cual gira a una velocidad síncrona (ωs) de acuerdo con la
frecuencia eléctrica de alimentación, cada uno de los enrollados originan un flujo y de este
modo generan en cada fase una fuerza magnetomotriz en el estator, y también inducen
corrientes en el rotor mediante el mismo efecto que el transformador (inducción). Gracias a
las corrientes de estator y rotor es posible generar torque en el eje de la máquina.
El motor de inducción esta constituido principalmente por el estator, el rotor, la carcasa
y las partes auxiliares.
Estator (Inductor): El estator es considerado como la parte estacionaria y una de las
partes del circuito magnético del motor de inducción, está compuesto por un núcleo
laminado de acero circular (que permite reducir las pérdidas por corrientes parásitas
que se inducen en él), el cual tiene ranuras axiales donde se alojan los embobinados
del estator, donde dichos embobinados están separados 120º entre ellas. Esta rodeado
por una carcasa, disponiéndose en estas las correspondientes partes de fijación y los
anillos de elevación y transporte.

Rotor de Jaula de Ardilla (Inducido): Consiste en una serie de barras axiales
(alojadas en las ranuras del rotor) cortocircuitadas en sus extremos por dos anillos
conductores para formar una jaula cerrada como se muestra en la fig. 1(a). La jaula es
de aluminio o cobre y su apariencia física es la que se muestra en la fig. 1(b). En
general, la gran simplicidad en el diseño de este rotor es la que otorga a la máquina de
inducción las ventajas de diseño compacto, costo (debido a la facilidad en su
construcción) y mantención (no requiere escobillas).
(a) (b)
Fig. 1: Rotor de Jaula de Ardilla
Carcasa y partes auxiliares: Recibe el nombre de soporte por ser el elemento que
contiene el estator y los elementos auxiliares del motor, estos elementos auxiliares
son: tapa exterior y posterior, chumaceras, tornillos de sujeción, caja de conexiones y
la base o soporte, estos elementos son necesarios para el funcionamiento del motor de
inducción y depende del tipo de dicho motor.
Deslizamiento.
Si Ns es la velocidad síncrona del campo magnético rotatorio y Nr es la velocidad del
rotor, la diferencia entre las dos se define como el desplazamiento, este es frecuentemente
expresado como una fracción de la velocidad síncrona.

Ecuación 1: Deslizamiento.
Donde:
S= Deslizamiento.
Ns= Velocidad síncrona.
Nr= Velocidad del rotor.
El deslizamiento que sufre el rotor se ve afectado por la inercia y las perdidas que tiene
que vencer, debido a esto, la velocidad del rotor se ve disminuida con respecto a la
velocidad del campo magnético rotatorio.
La velocidad del rotor no podrá ser mayor a la velocidad síncrona, y si por alguna razón
se da esto se dice que el rotor tiene desplazamiento negativo, lo cual significa que la
maquina esta trabajando como un generador.
Velocidad del rotor.
Utilizando la ecuación de desplazamiento y despejando de ella la velocidad del rotor Nr,
se obtiene:
Ecuación 2: Velocidad del rotor
Como se puede apreciar la velocidad del rotor depende del desplazamiento. Cuando
menor sea el desplazamiento, mas cerca estará el rotor trabajando a la velocidad síncrona
del campo magnético rotatorio, por consiguiente la carga de trabajo del motor será menor y
si el rotor tiene un alto deslizamiento esto es indicativo de que el motor esta sobrecargado y
la velocidad del rotor será menor a su velocidad nominal.

Frecuencia del rotor.
La frecuencia de voltaje en el estator es la misma que la del voltaje en el rotor cuando el
deslizamiento es unitario, en condiciones de marcha la frecuencia del rotor estará
influenciada por el comportamiento del deslizamiento.
Ecuación 3: Frecuencia del rotor
Donde:
S= Deslizamiento.
fs= Frecuencia del rotor.
f= Frecuencia del estator.
El deslizamiento puede ser medido con las frecuencias del rotor y el estator, esto solo
puede ser posible en los motores de rotor devanado, ya que este tipo de motores tienen
conexiones al rotor, en el caso de rotor tipo jaula de ardilla no es posible medir la
frecuencia del rotor, pero el comportamiento de la frecuencia del rotor es el mismo de la
ecuación 3.
Circuito equivalente del motor de inducción.
Las resistencias re y rr representan las pérdidas en los enrollados de estator y rotor
respectivamente.

Las inductancias Xe y Xr modelan las perdidas por flujos de fuga en el estator y rotor
respectivamente.
La rama paralela en el estator representa las pérdidas en vacío tales como pérdidas en el
fierro en el estator y rotor, perdidas por roce (que son función de la velocidad) y pérdidas
adicionales.
Características del motor de inducción sin carga conectada:
Prueba a rotor libre: La prueba a rotor libre (sin carga mecánica en el eje) es la
análoga a la prueba en vacio del transformador, permite determinar la rama paralela
del estator en el circuito equivalente de l motor de inducción. Esta prueba se realiza
de modo que la única corriente circulante sea I0. De modo que el deslizamiento es
nulo (S=0) y la expresión correspondiente a la carga mecánica tiende a infinito
s
srr
1'.
Para esta prueba se debe trabajar a voltaje nominal. Además, se debe medir la
corriente que entra y la potencia que entra a la máquina (notar que, dado que esta
máquina es trifásica, la potencia será trifásica y el voltaje de alimentación será fase-
fase). Así, los parámetros se calculan de la siguiente manera:

Prueba a rotor bloqueado: La prueba de rotor bloqueado es análoga a la prueba de
cortocircuito del transformador, es decir, permite encontrar los parámetros de la rama
serie de la máquina de inducción. Para ello se procede a detener (mediante una fuerza
externa) el rotor de la máquina de modo que es deslizamiento sea unitario y
01'
s
srr
.
Para esta prueba se debe trabajar a voltaje reducido, con la idea de que la corriente que
ingresa al motor sea nominal, para no dañar los enrollados. Además, se debe medir el
voltaje de alimentación y la potencia que entra a la máquina (notar que, dado que esta
máquina es trifásica, la potencia será trifásica y el voltaje de alimentación será fase-
fase). Así, los parámetros se calculan de la siguiente manera:
La rama serie, mediante los valores req y Xeq, representan los valores de estator y rotor:

Al igual que en el caso anterior, las mediciones obtenidas en la prueba son el voltaje
aplicado al estator (V1), la corriente circulante (I1) y la potencia activa (Pc).
Además, al igual que en el caso del transformador, puede suponerse con buena
aproximación que:
Prueba en corriente directa: La resistencia re es la calculada con la medición de
voltaje y corriente continúa aplicados a dos de los devanados del motor, la aplicación
de corriente directa elimina los efectos inductivos.
Análisis de Potencia y par del motor de inducción:
La potencia monofásica transferida al eje corresponde a la potencia transferida al rotor:

2'*
'r
rrotor I
S
rP
Sin embargo, parte de esta potencia se pierde en calor:
2'*
)1('r
rmec I
S
SrP
Para el caso trifásico, basta multiplicar esta potencia por tres:
2
3 '*)1('3
rr
mec IS
SrP
El torque se puede calcular como la potencia partido por la velocidad angular. Así, se
tiene que:
S
IrI
SS
SrT rr
s
r
s
r
22
3
''*3*
1'*
*)1(
)1('3
Y el valor de la corriente se obtiene de resolver el circuito equivalente. Así, se tiene que:
''
'
rer
e
e
r
XXjS
rr
VI
Con lo cual:
2
2
2
2
3
''
*'3
'**)1(
)1('3
rer
e
e
s
rr
s
r
XXS
rr
V
S
rI
SS
SrT
El torque máximo en función del deslizamiento se obtiene derivando la ecuación del
torque con respecto a S e igualando a 0. Así, queda que:
22
2
max
'*
2
'3
reee
e
s
r
XXrr
VrT

Cabe notar que esta ecuación muestra que el torque máximo no depende de la resistencia
de rotor. Pero al considerar el deslizamiento al que se produce este torque, no sucede lo
mismo:
22'
'max
ree
rT
XXr
rS
Estas expresiones dicen que es posible controlar tanto el torque máximo como el
deslizamiento al que se alcanza este torque máximo. Esto permite que para motores de
inducción de rotor bobinado sea posible hacer coincidir el torque máximo con el torque a la
partida, y una vez llegado a régimen permanente, cortocircuitar las resistencias para
disminuir las pérdidas que provocan.
Clases del motor de inducción
Clase A: Es un motor de jaula de ardilla para usarse a velocidad constante. Sus
principales características son:
o Buena capacidad de disipación de calor.
o Alta resistencia y baja reactancia al arranque.
o El par máximo esta entre 200% y 300% del par de plena carga y ocurre a un
bajo deslizamiento.
o Aceleración bastante rápida hacia la velocidad nominal.
o Presenta la mejor regulación de velocidad, entre el 2 y 4%.
o Desafortunadamente su corriente de arranque varía entre 5 y 7 veces la
corriente nominal.
o Han sido reemplazados por los motores de diseño clase B en los últimos
años.
o Se utilizan en ventiladores, sopladores, bombas, tornos, etc.
Clase B: Se les llama motores de propósito general y a este tipo pertenecen la
mayoría de los motores con rotor de jaula de ardilla. A continuación se resumen sus
características.
o Par de arranque normal, baja corriente de arranque y bajo deslizamiento.
o Produce casi el mismo par de arranque que el diseño anterior.

o El par máximo es mayor o igual al 200% que el par de carga nominal.
o Deslizamiento bajo (menor del 5%).
o Se prefieren sobre los diseños de clase A por requerir poca corriente de
arranque.
Clase C:
o Alto par de arranque (entre 2 y 2.5 veces el nominal) con bajas corrientes de
arranque (de 3.5 y 5 veces la nominal).
o Son construidos con un rotor de doble jaula (más costosos).
o Bajo deslizamiento (menos del 5%) a plena carga.
o Debido a su alto par de arranque, acelera rápidamente.
o Cuando se emplea con cargas pesadas, se limita la disipación térmica del
motor, ya que la mayor parte de la corriente se concentra en el devanado
superior.
o Tiende a sobrecalentarse con arranques frecuentes.
o Se utilizan para cargas con altos par de arranque, como bombas,
compresores y transportadores.
Clase D:
o Alto par de arranque (275% o mas del nominal) y baja corriente de arranque.
o Alto deslizamiento a plena carga.
o La alta resistencia del rotor desplaza el par máximo hacia una velocidad muy
baja.
o Diseñado para servicio pesado de arranque, en especial grandes volantes
utilizados en troqueladores o cortadoras.
También existen las clases E y F, llamados motores de inducción de arranque suave.

Metodología
Materiales:
Para ambos ensayos de rotor bloqueado y libre se necesitó:
Un Vatímetro Trifásico.
Tres amperímetros
Un voltímetro
Motor de inducción
Características del Motor:
Conexión: Estrella
P (W) U (V) U (V) I (A) I (A) F (Hz) Ns
1000 127 220 7.4 4.3 60 3450 rpm
Procedimiento Experimental
En primer lugar se realizó en el ensayo a rotor libre en la cual se llevó a cabo de la
siguiente manera:
1. Se varió la tensión aplicada al motor en un paso de 40 voltios hasta llegar a su
tensión nominal, midiendo su tensión respectiva.
2. Se midió las corrientes en cada fase y potencia trifásica en cada uno de los valores
de Tensión.
En segundo lugar se realizó el ensayo a rotor bloqueado procediendo de la siguiente
manera:
1. Se varió la corriente en un paso de 0.5 amperios hasta llegar a su corriente nominal,
midiendo dicha intensidad en cada fase.
2. Se midió tensión y potencia trifásica en cada uno de sus respectivos valores de
intensidad.

Se llevó a cabo el ensayo de corriente directa de la siguiente forma:
1. Se aplicó una tensión continua mínima al estator de la máquina midiendo dicha
tensión.
2. Se midió la corriente directa del estator
Procedimiento para determinar los parámetros del Circuito Equivalente:
1. Determinar la resistencia del Estator
2. Calcular las perdidas en el cobre del estator
3. Calcular las perdidas rotacionales, estas se obtiene de la diferencia de las pérdidas
medidas en el ensayo y las del cobre del estator (tantas pérdidas rotacionales como
corrientes medidas en el ensayo de rotor libre).
4. Graficar las perdidas rotacionales vs la tensión aplicada en cado intervalo. Se
utilizó el método de regresión polinomial, para así aproximar una curva que más se
asemeja a los valores medidos.
5. Se mide el valor donde la recta corte al eje y, dicho valor va hacer las perdidas
mecánicas. El resto van hacer las perdidas en el núcleo, esto método se realizó para
separar las pérdidas del núcleo y mecánicas determinando así los parámetros de la
rama de magnetización.
6. En el ensayo de rotor bloqueado se determina la impedancia vista de los terminales
del motor, en la cual no se toma en cuenta la rama de magnetización.
7. Por último se selecciona la clase del motor para así separar las reactancias del
estator y rotor
Como en la práctica se midieron corrientes en cada fase para los cálculos se toma el
promedio de las tres.
Para el cálculo de los parámetros del circuito equivalente se realizó un programa en
Matlab. Tomando en cuenta el procedimiento descrito anteriormente.

%Programa: Circuito Equivalente del Motor de Inducción
Vcd=input('Ingrese la tensión medida para el ensayo de Corriente Directa:');
disp (Vcd);
Icd=input('Ingrese la intensidad medida para el ensayo de Corriente Directa:');
disp (Icd);
Pcc=input('Ingrese la potencia medida para el ensayo de rotor bloqueado:');
disp (Pcc);
Vcc=input('Ingrese la tension para el ensayo de rotor bloqueado:');
disp (Vcc);
Icc=input('Ingrese la intensidad para el ensayo de rotor bloqueado:');
disp (Icc);
f=input('Ingrese la frecuencia de la linea del sistema de potencia (nominal):');
disp (f);
%XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXXXX
disp('Ensayo de Rotor LIbre ');
disp('1.Perdidas Mecánica son una tercera parte de las Pérdidas del Nucleo');
disp('2.Separacación de perdidas Mecánicas y del Hierro');
opcion=input('Seleccione una opción:');
switch (opcion)
case (1)
F=1;

disp('1.Pfe= 3*mec');
Po=input('Ingrese la potencia medida para el ensayo de rotor libre:');
disp (Po);
Vo=input('Ingrese la tension para el ensayo de rotor libre:');
disp (Vo);
Io=input('Ingrese la intensidad para el ensayo de rotor libre:');
disp (Io);
case (2)
F=2;
disp('2.Separacación de perdidas Mecánicas y del Hierro');
n= input('Ingrese la cantidad de mediciones obtenidas= ');
disp (n);
for k = 1:n
fprintf ('Ingrese el valor de los voltajes medidos Vo= ',k);
Vo(k) = input('');
end
disp(Vo);
for k = 1:n
fprintf('Ingrese las corrientes medidas Io= ',k);
Io(k) = input('');
end
disp(Io);
for k = 1:n

fprintf ('Ingrese las Potencias medidas Po= ',k);
Po(k) = input('');
end
disp(Po);
end
%XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXXXX
disp('Conexión Interna');
disp('3. Estrella.');
disp('4. Delta.');
disp('5. Salir del programa.');
opcion=input('Seleccione una opcion:');
switch (opcion)
case (3)
disp('Conexión Estrella.');
Vo= Vo/sqrt(3);
Vcc= Vcc/sqrt(3);
R1= Vcd/(2*Icd);
case (4)
disp('Conexión Delta.');
Io= Io/sqrt(3);
Icc= Icc/sqrt(3);
R1= (3*Vcd)/(2*Icd);

case (5)
break;
otherwise
disp('Seleccione una opcion entre 1 y 3')
end
%XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXX
%Ensayo de Rotor libre
m=3;
if F==1
%Primera Aproximación
% Pfe=3*Pmec;
Pcu1= m*R1*Io^2;% Pérdidas en el cobre del Estator
%Prot= Pfe + Pmec; Perdidas Rotacionales
Prot= Po-Pcu1;
Pmec= Prot/4;
Pfe=3*Pmec
A= acos( Pfe/(m*Vo*Io));
B=cos(A);
C=sin(A);

Ife= Io*B; IM= Io*C;
Rfe= Vo/Ife; XM= j*(Vo/IM);
%XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXX
else
%Segunda Aproximación
Vo2= Vo*sqrt(3);
for h=1:n
Pcu1(h)= m*R1*Io(h)^2;
Prot(h)= Po(h)-Pcu1(h);
end
for J=1:3
for K = 1:3
s1=0;
for i=1:n
s1= s1+(Vo2(i)^(J+K-2));
end
A(J,K)=s1;
end
end
for J=1:3
s2=0;
for i=1:n

s2=s2+Prot(i)*(Vo2(i)^(J-1));
end
B(J)=s2;
end
B=B';
a=inv(A)*B;
a=a';
d= a(1,3);
b= a(1,2);
w= a (1,1);
for g= 1:n
Prot2(g)=d*Vo2(g)^2 + b*Vo2(g) + w ;
end
Pmec= w;
Pfe(n)= Prot(n)-Pmec;
A(n)= acos( Pfe(n)/(m*Vo(n)*Io(n)));
B(n)=cos(A(n));
C(n)=sin(A(n));
Ife1(n)= Io(n)*B(n); IM1(n)= Io(n)*C(n);
Rfe1(n)= Vo(n)/Ife1(n); XM1(n)= j*(Vo(n)/IM1(n));
Rfe=Rfe1(n); XM= XM1(n);
end

%XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXX
%Ensayo en Rotor Bloqueado
fcc= 0.25*f; %Frecuencia del ensayo
D= acos( Pcc/(m*Vcc*Icc));
E=cos(D);
F=sin(D);
Rcc= (Vcc*E)/Icc; Xcc1= j*((Vcc*F)/Icc);
R2= Rcc-R1; Xcc= (f/fcc)*Xcc1;
%XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXX
disp('Diseño del Rotor');
disp('1. Rotor Embobinado.');
disp('2. Diseño A.');
disp('3. Diseño B.');
disp('4. Diseño C.');
disp('5. Diseño D.');
opcion=input('Seleccione una opcion:');
switch (opcion)
case (1)
disp('Rotor Embobinado.');
X1= 0.5*Xcc;
X2= 0.5*Xcc;

case (2)
disp('Diseño A.');
X1= 0.5*Xcc;
X2= 0.5*Xcc;
case (3)
disp('Diseño B.');
X1= 0.4*Xcc;
X2= 0.6*Xcc;
case (4)
disp('Diseño c.');
X1= 0.3*Xcc;
X2= 0.7*Xcc;
case (5)
disp('Diseño D.');
X1= 0.5*Xcc;
X2= 0.5*Xcc;
end
%XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXX
fprintf('\n Resistencia del Estator. R1: \n\n')
disp(R1)
fprintf('\n Reactancia del Ensayo en Rotor Bloqueado. R1: \n\n')
disp(Xcc)
fprintf('\n Reactancia del Estator. X1: \n\n')
disp(X1)
fprintf('\n Resistencia de la Rama de Magnetización. Rfe: \n\n')

disp(Rfe)
fprintf('\n Reactancia de la Rama de Magnetización. XM: \n\n')
disp(XM)
fprintf('\n Resistencia del Rotor. R2: \n\n')
disp(R2)
fprintf('\n Reactancia del Rotor. X2: \n\n')
disp(X2)
%XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXX
if F~=1
plot(Vo2,Prot2,'b')
grid on
ylabel('Prot=Pmec+Pfe')
xlabel('V1')
end
clear all

Valores medidos en la práctica:
Tabla n01. Ensayo a Rotor libre.
Vt (V) I1 (A) I2 (A) I3 (A) Po (w)
40 0.75 0.8 0.65 35
80 0.9 0.9 0.9 47
120 0.95 1.1 0.85 85
160 1.25 1.5 1.25 150
200 1.8 2.2 1.85 230
240 2.85 3.5 3.1 450
Tabla n02. Ensayo a Rotor Bloqueado.
Vt (V) I1 (A) I2 (A) I3 (A) Pcc(w)
7 0.5 0.5 0.5 2
12 1.1 1.1 0.9 8.5
17 1.4 1.55 1.35 20
22 2.1 2.3 2.2 40
27 2.5 2.7 2.5 80
31 3.0 3.0 2.9 100
35 3.4 3.55 3.35 140
41 4.0 4.1 3.85 190
43 4.3 4.4 4.33 220
Tabla n03. Ensayo de Corriente Continua.
V (V) I (A)
6 1.8

Resultados Obtenidos de los Ensayos.
Tabla n03. Parámetros del Circuito Equivalente.
R1 X1 R2 X2 Rm Xm
1.66 j8.39 2.29 j8.39 174.73 j50.61
Tabla#4 valores medidos del motor de inducción 3ø
VAB
(v)
VBC
(V)
VCA
(V)
IA(
A)
IB (A) IC (A) WT(W)
3ø
Nrpm
219 218 219 3.3 3.3 3.3 880 3510
219 217 218 3.1 3.1 3.1 820 3515
219.2 217 218.2 3 3 3 760 3519
219.1 216.9 218.2 2.9 2.9 2.9 710 3525
219 216.8 218.2 2.8 2.8 2.8 610 3536
219.4 217.4 218.5 2.5 2.5 2.5 510 3547
Tabla#5 valores del generador DC
Vf(V) If(A) Va(V) Ia(A)
62.4 0.22 118.2 4.4
62.4 0.3 119.2 3.75
62.4 0.3 120.2 3.6
62.4 0.3 221 3.35
62.4 0.3 122.8 2.8
62.3 0.3 124.7 2.1
Hallando la potencia convertida y el torque de entrada al motor de inducción 3ø para
diferentes valores de corriente, potencia y revoluciones por minuto.

Tabla de valores a utilizar:
Valores de
resistencia (Ω)
I1(A) I2(A) Wt(W)
3ø
Nrpm
R1 = 1.66
R2 = 2.29
3.3 3.3 880 3510
3.1 3.1 820 3515
3 3 760 3519
2.9 2.9 710 3525
2.8 2.8 610 3536
2.5 2.5 510 3547
Cálculos para ensayo bajo carga.
Para:
I1 = I2 = 3.3A
Wt = 880w
Nrpm = 3510
Pin = 880w
P SCL = 3*I12*R1
PSCL = 3*(3.3)2*1.66 = 54.23w
PAG = Pin – Pscl
PAG = 293.33 – 54.23 = 825.77w
PRCL = 3*I22*R2
PRCL = 3*(3.3)2*2.29 = 74.81w
Pconv = PAG - PRCL
Pconv = 825.77 – 74.81 = 750.96w

WS = Nrpm(
)(
)
WS = 3510
(
)(
) = 367.56
Tind =
Para:
I1 = I2 = 3.1A
Wt = 820w
Nrpm = 3515
Pin = 820w
P SCL = 3*I12*R1
PSCL = 3*(3.1)2*1.66 = 47.86w
PAG = Pin – Pscl
PAG = 820 – 47.86 = 772.14w
PRCL = 3*I22*R2
PRCL = 3*(3.1)2*2.29 = 66.02w
Pconv = PAG - PRCL
WS = Nrpm(
)(
)
WS = 3515
(
)(
) = 368.09
Tind =
Tind = 2.04 N.m
Pconv = 772.14 – 66.02 = 706.12w
Tind = 1.9183

Para:
I1 = I2 = 3A
Wt = 760w
Nrpm = 3519
Pin = 760w
P SCL = 3*I12*R1
PSCL = 3*(3)2*1.66 = 44.82w
PAG = Pin – Pscl
PAG = 760 – 44.82 = 715.18w
PRCL = 3*I22*R2
PRCL = 3*(3)2*2.29 = 61.83w
Pconv = PAG - PRCL
WS = Nrpm(
)(
)
WS = 3519
(
)(
) = 368.509
Tind =
Pconv = 715.18 – 61.83 = 653.35w
Tind = 1.7730 N.m

Para:
I1 = I2 = 2.9A
Wt = 710w
Nrpm = 3525
Pin = 710w
P SCL = 3*I12*R1
PSCL = 3*(2.9)2*1.66 = 41.88w
PAG = Pin – Pscl
PAG = 710 – 41.88 = 668w
PRCL = 3*I22*R2
PRCL = 3*(2.9)2*2.29 = 57.77w
Pconv = PAG - PRCL
WS = Nrpm(
)(
)
WS = 3525
(
)(
) = 369.14
Tind =
Pconv = 668 – 57.77 = 610w
Tind = 1.6534 N.m

Para:
I1 = I2 = 2.8A
Wt = 610w
Nrpm = 3536
Pin = 610w
P SCL = 3*I12*R1
PSCL = 3*(2.8)2*1.66 = 39.04w
PAG = Pin – Pscl
PAG = 610 – 39.04 = 570.96w
PRCL = 3*I22*R2
PRCL = 3*(2.8)2*2.29 = 53.86w
Pconv = PAG - PRCL
WS = Nrpm(
)(
)
WS = 3536
(
)(
) = 370.29
Tind =
Pconv = 570.96 – 53.86 = 517.10w
Tind = 1.3965 N.m

Para:
I1 = I2 = 2.5A
Wt = 510w
Nrpm = 3547
Pin = 510w
P SCL = 3*I12*R1
PSCL = 3*(2.5)2*1.66 = 31.125w
PAG = Pin – Pscl
PAG = 510 – 31.125 = 478.87w
PRCL = 3*I22*R2
PRCL = 3*(2.5)2*2.29 = 42.93w
Pconv = PAG - PRCL
WS = Nrpm(
)(
)
WS = 3547
(
)(
) = 371.44
Tind =
=
Pconv = 478.87 – 42.93 = 435.94w
Tind = 1.1737 N.m

Vt1Vt Rm
R2 jX2R2 jX1R1 jX1
JXM
40 60 80 100 120 140 160 180 200 220 2400
50
100
150
200
250
300
350
400
Pro
t=P
mec+
Pfe
V1
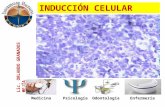
Figura n01.Circuito Equivalente del Motor de Inducción.
Figuran02.Perdidas Rotacionales vs Tensión en Bornes.
Estator Rotor

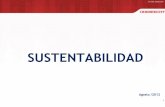
Figura#3 torque inducido vs wm
Figura#4 potencia convertida vs wm
3510 3515 3520 3525 3530 3535 3540 3545 35501.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
2.1
Wm
Torq
ue inducid
o
3510 3515 3520 3525 3530 3535 3540 3545 3550400
450
500
550
600
650
700
750
800
wm
pote
ncia
convert
ida

Análisis de los Resultados.
Como se puede observar en las tablas uno y dos se cumplió las condiciones para el
ensayo a rotor libre y bloqueado, es decir que para el ensayo de vació se llegó a la tensión
nominal de la máquina, en la cual se varió para que así poder crear la curva vista en la
figura n02 que nos permite separar las pérdidas mecánicas y del núcleo. Unas ves separadas
las pérdidas rotacionales se obtuvieron la resistencia y reactancia de la rama de
magnetización, cuyo resultado confirma el descrito por la teoría, que la reactancia y
resistencia son parámetros de magnitud elevada en comparación con los demás parámetros
del circuito equivalente y la reactancia de la rama de magnetización es mayor que la
reactancia de un Transformador.
Al no conocer la clase del motor con la que se llevó a cabo la práctica, para los cálculos
se estima que la maquina es de clase A, si no es de este tipo se puede modificar
seleccionando otra de las opciones que tiene el programa con respecto a los tipos de
motores.
Se puede observar en la tabla n03 la resistencia del Rotor (R2) es menor que la reactancia
del rotor esto es debido a que el desplazamiento en rotor bloqueado es uno. Pero en
condiciones de normal funcionamiento este parámetro es relativamente mayor que la
reactancia del rotor.
También se logra aprecias que a medida que aumenta la velocidad en el eje cae
significativamente la potencia y el torque inducido en la máquina, figuras (3) y (4).

Anexos

Placas características.

Bibliografía
Chapman J Stephen, “Máquinas Eléctricas’’, Capítulo 10: Motor de Inducción, Segunda
Edición (1987).
Fraile M Jesús, ’’Máquinas Eléctricas’’, Capítulo 4: Máquina Asíncrona, Sexta Edición
(2008).

Conclusiones:
Se cumplió el objetivo planteado que es determinar los parámetros del circuito
equivalente de un motor de inducción mediante el ensayo de rotor bloqueado, rotor libre y
corriente directo. En la cual cada uno de los ensayos son importante porque te ayudan
implícitamente a determinar otros parámetros, ya que por medio del ensayo de corriente
continua se determina la resistencia de armadura, y en el ensayo de rotor bloqueado la
impedancia vista desde los terminales no incluyendo la rama de magnetización por los
motivos explicados anteriormente, conociendo estos dos factores se determina la resistencia
del rotor. Conocer la clase del motor es fundamental ya que permite saber el valor real de la
reactancia del estator y rotor, teniendo en cuenta que este factor como depende de la
frecuencia el ensayo se debe de realizar a un 25 % de la frecuencia de la línea, si no esto
llevara a errores afectando el funcionamiento de la máquina. También logramos observar
mediante los gráficos realizados que a cuando la velocidad de la maquina comienza a
aumentar hasta llegar a su velocidad nominal la potencia convertida, que sería
prácticamente la de salida de la máquina, ya que la potencia misceláneas y por rozamientos
son pequeñas en comparación con las otras comienza a disminuir. También sucede lo
mismo con el torque inducido ya que por la ecuación del mismo depende de la potencia
convertida y de la velocidad de la máquina, entonces se observa que a medida que la
velocidad aumenta el torque disminuye.
Kelvin Matos
C.I: 20.690.627

Los motores de inducción con rotor tipo jaula de ardilla, son en la actualidad las máquinas
eléctricas de mayor aplicación industrial (entre el 80% y 90% de los motores industriales
son de inducción trifásicos).
En esta práctica se cumplieron de manera satisfactoria todos los objetivos que se
plantearon:
Se obtuvieron los parámetros del circuito equivalente, a través de los ensayos a rotor
libre y a rotor bloqueado, el ensayo a rotor libre se logro obtener una curva, la cual nos
permitió separar las perdidas mecánicas y las perdidas en el núcleo, y por medio de las
formulas presentadas en el marco teórico se obtiene la resistencia y la reactancia de la
rama en paralelo, que son parámetros mas elevados en comparación a la rama serie que
se obtiene con el ensayo a rotor bloqueado se estima que la maquinas es de clase A, por
lo tanto el valor de la resistencia del estator es menor que la del rotor debido al
deslizamiento y la reactancia para el rotor y el estator será la mitad del obtenido en el
ensayo.
En el ensayo baja carga, utilizando el rotor de la maquina de corriente continua como la
carga, se observo que debido al aumento de la velocidad en el eje, tanto la potencia,
como el torque en la maquina disminuyen significativamente.
Chávez Mary Carmen
C.I: 21.353.795

Con el desarrollo de esta práctica se pudo comprender a gran escala el funcionamiento del
motor de inducción 3ø en especial el de jaula de ardilla, al cual le obtuvimos los parámetros
del circuito equivalen a partir de los ensayos a rotor libre y a rotor bloqueado. Se pudo
apreciar con esto que un motor de inducción es básicamente un transformador rotante y su
circuito equivalente es similar al de un transformador, excepto en lo que respecta a la
variación de velocidad.
Con el ensayo en vacío se pueden medir las perdidas rotacionales del motor donde la
única carga puesta sobre el motor es su rozamiento propios y el rozamiento con el aire de
modo que la Pconv es consumida en el motor por las pérdidas mecánicas y el deslizamiento
del motor en muy pequeño. El ensayo en cortocircuito permite obtener los parámetros de la
rama serie del motor; debido a que S=1 y el motor se comporta como un transformador en
cortocircuito.
Es oportuno mencionar que un motor de inducción tiene físicamente el mismo estator que
una maquina síncrona pero la construcción del rotor es diferente.
Se pudo desarrollar también el ensayo bajo carga donde se tiene un generador DC
acoplado al motor de inducción; aquí pudo observarse que las cantidades de salida en el
generador DC son su voltaje en terminales y su corriente de línea. En este ensayo pudimos
darnos cuenta que el voltaje interno generado es independiente de Ia ya que este se
mantiene constante cuando Ia aumenta.
Reinaldo Narvaez
C.I: 19831738