Equilibrio Estatico de Cuerpos Rigidos
54
EQUILIBRIO ESTATICO INTRODUCCUON: El equilibrio estático es fundamental en la ingeniería. Todo cuerpo que "no se mueve", o se mueve con velocidad constante está en equilibrio estático. Edificios, puentes, cualquier estructura en general son calculadas suponiendo que están en equilibrio (Resultante del sistema de fuerzas igual a cero). Por supuesto, solo con el equilibrio estático no puede construirse tales estructuras y es necesario acudir a otras herramientas con la "Resistencia de Materiales" (pues todos los cuerpos son deformables). En fin, con ejemplos, construcción de embarcaciones, estructuras que sirvan de soporte a alguna maquinaria, grúas, etc. Un sistema está en equilibrio cuando la fuerza total o resultante que actúa sobre un cuerpo y el momento resultante son nulos. En este caso, la propiedad macroscópica del cuerpo que no cambia con el tiempo es la velocidad. En particular, si la velocidad inicial es nula, el cuerpo permanecerá en reposo. El equilibrio mecánico puede ser de tres clases: estable, indiferente o inestable. Si las fuerzas son tales que un cuerpo vuelve a su posición original al ser desplazado, como ocurre con un tentetieso, el cuerpo está en equilibrio estable. Si las fuerzas que actúan sobre el cuerpo hacen que éste permanezca en su EQUILOBRIO ESTATICO Página 1
-
Upload
nik-orlan-garcia-clderon -
Category
Documents
-
view
908 -
download
0
Transcript of Equilibrio Estatico de Cuerpos Rigidos
EQUILIBRIO ESTATICO
INTRODUCCUON: El equilibrio estático es fundamental en la ingeniería. Todo cuerpo que "no se mueve", o
se mueve con velocidad constante está en equilibrio estático. Edificios, puentes,
cualquier estructura en general son calculadas suponiendo que están en equilibrio
(Resultante del sistema de fuerzas igual a cero). Por supuesto, solo con el equilibrio
estático no puede construirse tales estructuras y es necesario acudir a otras herramientas
con la "Resistencia de Materiales" (pues todos los cuerpos son deformables). En fin, con
ejemplos, construcción de embarcaciones, estructuras que sirvan de soporte a alguna
maquinaria, grúas, etc.
Un sistema está en equilibrio cuando la fuerza total o resultante que actúa sobre un
cuerpo y el momento resultante son nulos. En este caso, la propiedad macroscópica del
cuerpo que no cambia con el tiempo es la velocidad. En particular, si la velocidad inicial
es nula, el cuerpo permanecerá en reposo. El equilibrio mecánico puede ser de tres
clases: estable, indiferente o inestable. Si las fuerzas son tales que un cuerpo vuelve a su
posición original al ser desplazado, como ocurre con un tentetieso, el cuerpo está en
equilibrio estable. Si las fuerzas que actúan sobre el cuerpo hacen que éste permanezca
en su nueva posición al ser desplazado, como en una esfera situada sobre una superficie
plana, el cuerpo se encuentra en equilibrio indiferente. Si las fuerzas hacen que el
cuerpo continúe moviéndose hasta una posición distinta cuando se desplaza, como
ocurre con una varita en equilibrio sobre su extremo, el cuerpo está
en equilibrio inestable.
Para tal cuerpo tanto la aceleración lineal de su centro de masa como su aceleración
angular relativa a cualquier punto son nulas. Es un estado por el cual una persona, puede
mantener una actividad o un gesto, quedar inmóvil o lanzar su cuerpo en el espacio,
utilizando la gravedad o resistiéndola.
El equilibrio es la función que mantiene la proyección de centro de gravedad, dentro del
polígono de sustentación. equilibrio requiere de la integración de dos estructuras
EQUILOBRIO ESTATICO Página 1
complejas que como son el propio cuerpo y su relación espacial y la estructura espacial
y temporal que facilita el acceso al mundo de los objetos y las relaciones.
EQUILIBRIO DE LOS CUERPOS
Definición matemática :
El centro de gravedad de un cuerpo es el punto de aplicación de la resultante de todas
las acciones de gravedad sobre las moléculas del cuerpo.
El punto G de aplicación de la resultante g se llama baricentro del cuerpo dado.
Ejemplo: Supongamos un cuerpo constituido por 10 moléculas iguales. Sus fuerzas
gravíticas particulares son 1, 2, 3,..., 9, 10. La fuerza gravítica general es g, resultante
del sistema 1, 2, 3,..., 9, 10.
Equilibrio.- El equilibrio es el estado de reposo de un cuerpo. Un cuerpo está en
equilibrio cuando en su centro de gravedad está aplicada una fuerza igual y opuesta a su
peso.
Un cuerpo puede estar en equilibrio de dos modos: 1°, si está suspendido 2°, si descansa
en una base.
Condición de equilibrio de un cuerpo suspendido, móvil alrededor de un punto fijo.-
Para que un cuerpo móvil alrededor de un punto fijo esté en equilibrio, es menester que
la vertical que pasa por el centro de gravedad pase también por el punto de suspensión.
Con esta condición, el equilibrio puede ser: estable, inestable o indiferente.
El equilibrio es estable si el cuerpo, siendo apartado de su posición de equilibrio,
vuelve al puesto que antes tenía, por efecto de la gravedad. En este caso el
centro de gravedad está debajo del punto de suspensión.
Ejemplo: El péndulo, la plomada, una campana colgada.
EQUILOBRIO ESTATICO Página 2
El equilibrio es inestable si el cuerpo, siendo apartado de su posición de
equilibrio, se aleja por efecto de la gravedad. En este caso el centro de gravedad
está más arriba del punto o eje de suspensión.
Ejemplo: Un bastón sobre su punta.
El equilibrio es indiferente si el cuerpo siendo movido, queda en equilibrio en
cualquier posición. En este caso el centro de gravedad coincide con el punto de
suspensión.
Ejemplo: Una rueda en su eje.
Cuando el cuerpo se aleja de su posición de equilibrio, el peso P puede descomponerse
en dos fuerzas rectangulares; una anulada por la resistencia de uno de los ejes, y la otra
imprime al cuerpo un movimiento de rotación, que lo lleva a la posición de equilibrio
estable o lo aleja de ella.
Condición de equilibrio de un cuerpo que descansa sobre un plano.- Para que un cuerpo
que descansa sobre un plano esté en equilibrio es preciso que la vertical del centro de
gravedad pase por el interior de la base de sustentación. Se llama base de sustentación la
superficie de apoyo del cuerpo o también el polígono que se forma al unir los diversos
puntos de apoyo, cuando son varios (una silla, por ejemplo).
Un cuerpo colocado en un plano horizontal, puede presentar, como el caso precedente,
tres clases de equilibrio:
1° El equilibrio será estable, si el centro de gravedad está más bajo que cualquiera otra
posición. Ejemplo: Una pirámide que descansa sobre su base.
2° El equilibrio será inestable, si el centro de gravedad se halla más alto que
cualquiera otra posición. Ejemplo: una pirámide regular cuyo vértice descansa sobre su
plano.
3° Se hallará en Equilibrio indiferente, si su centro de gravedad no sube ni baja las
posiciones que pueda tomar. Ejemplo: una esfera perfecta y homogénea.
EJMPLOS:
EQUILOBRIO ESTATICO Página 3
Equilibrio de una Plataforma Sostenida por una Columna
Como el peso de la zapata y la presión del suelo son colineales, el primero no
contribuye al cortante vertical o al momento flexionate. Conviene visualizar la zapata
como sometida a una fuerza hacia arriba transmitida por el suelo y a una reacción hacia
abajo suministrada por la columna; esto es, desde luego, una inversión de la verdadera
forma de la aplicación de la carga. La zapata funciona entonces como una viga en
voladizo.
Aquí se aplica el momento de equilibrio en un punto extremo de la zapata, en la cual
intervienen la fuerza que aplica la columna a la zapata y la reacción del suelo por acción
del peso de ésta.
EQUILIBRIO DE CUERPOS RIGIDOS
Cuerpo Rígido.Un cuerpo rígido puede ser considerado como un conjunto formado por un gran número
de partículas que permanecen separadas entre sí por una distancia fija antes y después
de aplicar la carga. Como resultado, las propiedades del material de que está hecho
cualquier cuerpo que se suponga rígido no se tendrá que considerar cuando se analicen
las fuerzas que actúan sobre éste. Cantidades Básicas: Las cuatro cantidades siguientes
se utilizan en el equilibrio:
Longitud: La longitud es necesaria para ubicar un punto en el espacio y de esta
forma describir el tamaño de un sistema físico. Una vez que se define una unidad
estándar de longitud, puede definirse cuantitativamente distancias y propiedades
geométricas de un cuerpo como múltiplos de esa unidad de longitud.
Tiempo: El tiempo se concibe como una sucesión de eventos. Aunque los
principios de la Estática son independientes del tiempo, esta cantidad definitivamente
juega un papel importante en el estudio de la Dinámica.
Masa: La masa es una propiedad de la materia por la cual podemos comparar
la acción de un cuerpo con la de otro.
EQUILOBRIO ESTATICO Página 4
• Ángulos de Euler: Los ángulos de Euler constituyen un conjunto de tres
coordenadas angulares que sirven para especificar la orientación de un sistema
de referencia de ejes ortogonales, normalmente móvil, respecto a otro sistema de
referencia de ejes ortogonales normalmente fijos.
Definición de Equilibrio Estático
Cuando un cuerpo rígido está en reposo o en movimiento rectilíneo a velocidad
constante, relativo a un sistema de referencia, se dice que dicho cuero está e equilibrio
estático. Para tal cuerpo tanto la aceleración lineal de su centro de masa como su
aceleración angular relativa a cualquier punto son nulas. Obviamente este estado de
equilibrio estático tiene su fundamento en la primera Ley de Newton, cuyo enunciado
es: " Todo cuerpo en estado de reposo o de movimiento rectilíneo uniforme, permanece
en dicho estado, a menos que sobre ella actúe una fuerza" .
Condiciones de EquilibrioLas condiciones para que un cuerpo rígido se encuentre en equilibrio son:
Primera Condición de Equilibrio:(Equilibrio de traslación)
" La suma vectorial de todas las fuerzas que actúan sobre el sólido es igual a cero" .
Esto ocurre cuando el cuerpo no se traslada o cuando e mueve a velocidad constante; es
decir cuando la aceleración lineal del centro de masa es cero al ser observado desde un
sistema de referencia inercial.
= `F1 + `F2 +`F3 + ..... + `FN = 0
En esta ecuación de equilibrio no aparecen las fuerzas internas ya que ellas se cancelan
mutuamente en pares debido a la tercera Ley de Newton. Si las fuerzas estuvieran en el
espacio, la ecuación anterior ha de ser expresada por las siguientes relaciones:
EQUILOBRIO ESTATICO Página 5
= F1x + F2x + F3x +…. + Fx = 0
= F1y + F2y + F3y +..... + FNy = 0
= F1z + F2z + F3z +..... + FNz = 0
Obviamente en dos dimensiones (o sea en el plano) tendríamos solamente dos
ecuaciones y en una dimensión se tendría una única ecuación.
Segunda Condición de Equilibrio (Equilibrio de rotación)
" La suma vectorial de todos los torques o momentos de las fuerzas que actúan sobre el
cuerpo, relativos a cualquier punto dado, sea cero" . Esto ocurre cuando la aceleración
angular alrededor de cualquier eje es igual a cero.
`ti = `ti +`t2i +`t3i + .... + `tni = 0
De acuerdo a lo anterior, el máximo número de incógnitas que puede tener un problema
para poder solucionarlo completamente, es de seis para situaciones en tres dimensiones
y de tres para dos dimensiones.
La suma de las fuerzas internas, si se lleva acabo, seria a cero, puesto que las fuerzas
internas entre partículas dentro del cuerpo ocurrirán en pares coliniales iguales o
opuestos, de acuerdo con la tercera ley de NEWTON. En consecuencia, solo la suma de
las fuerzas externas permanecerá; por lo tanto, dejando que ΣFi=ΣF, la ecuación
anterior puede ser escrita como
ΣF=0
Hay que considerar también los momentos de las fuerzas que actúan sobre la partícula
con respecto a un punto arbitrario O; para esto hay que utilizar las ecuaciones de
equilibrio de una partícula y la ley distributiva del producto cruz de vectores.
r x (F x f) = r x F + r x f = 0
Ecuaciones similares que se les puede emplear en otras partículas
EQUILOBRIO ESTATICO Página 6
Σr x F + ΣF x f = 0
Las fuerzas internas ocurrirán en pares colineales iguales pero opuestos, el momento de
cada parte de fuerza con respecto al punto O, es igual a cero, deaqui utilizamos esta
notación ΣMo= Σr x F podemos escribir la ecuación anterior como:
ΣMo = 0
Las ecuaciones de un cuerpo rigido se pueden resumir como:
ΣF = 0
ΣMo = 0
Estas ecuaciones establecen que un cuerpo rígido estará en equilibrio siempre y cuando
la suma de todas las fuerzas externas que actúan sobre tal cuerpo sea igual a cero y que
la suma de los momentos de las fuerzas externas con respecto a un punto sea igual
también a cero.
Cuando en un problema hay tantas incógnitas como ecuaciones disponibles y se pueden
hallar todas, se dice que el problema es estáticamente determinado. Si existen más
incógnitas que ecuaciones, el problema es insoluble en su totalidad por los métodos de
la estática y el problema es estáticamente indeterminado.
De otra parte, hay situaciones en las que, a pesar de tener un número de incógnitas igual
al de ecuaciones disponibles no se pueden solucionar. Estas situaciones se presentan por
un arreglo especial de los apoyos, haciendo que el sistema no esté completamente
restringido para un sistema general de fuerzas.
Tal sistema es entonces estáticamente indeterminado y parcial o impropiamente
restringido. Un cuerpo parcialmente restringido puede estar en equilibrio para un
sistema particular de carga, pero dejará de estarlo para un sistema general de carga.
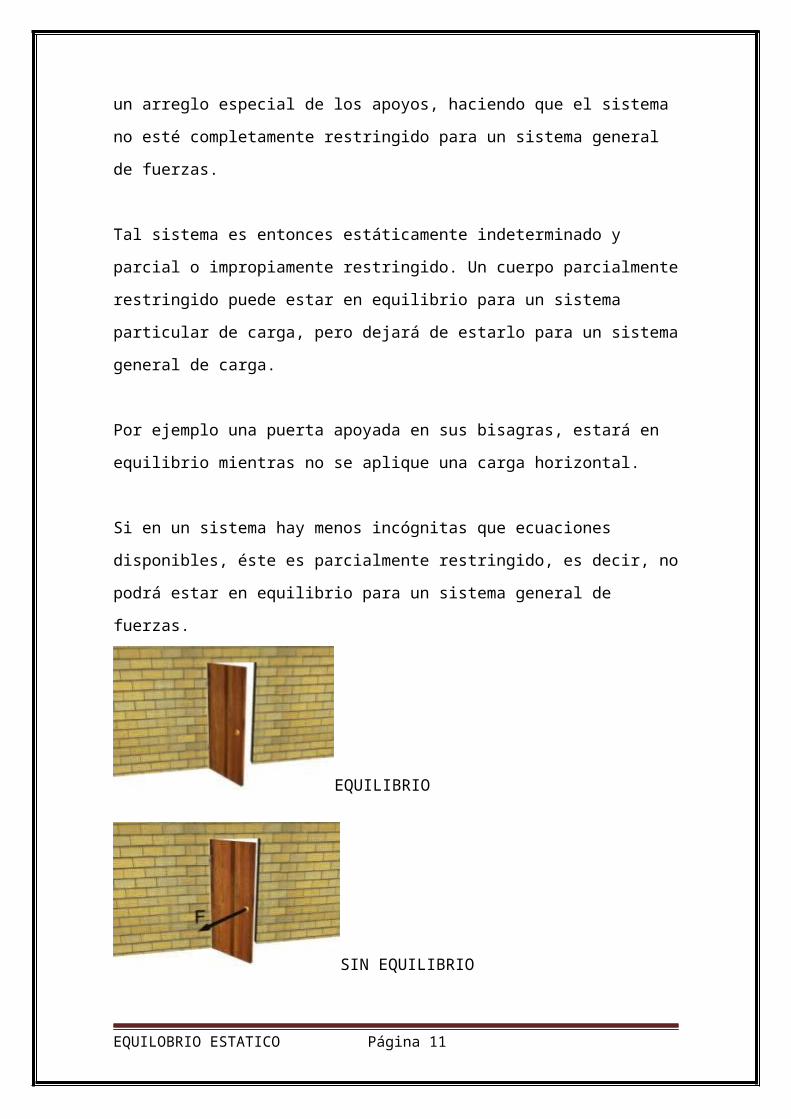
Por ejemplo una puerta apoyada en sus bisagras, estará en equilibrio mientras no se
aplique una carga horizontal.
Si en un sistema hay menos incógnitas que ecuaciones disponibles, éste es parcialmente
restringido, es decir, no podrá estar en equilibrio para un sistema general de fuerzas.
EQUILOBRIO ESTATICO Página 7
EQUILIBRIO
SIN EQUILIBRIO
Ecuaciones de Equilibrio.Un sólido rígido está en equilibrio, respecto a un sistema de referencia inercial S,
cuando la resultante de las fuerzas Fi aplicadas sobre él es nula y cuando el momento
resultante respecto a un punto cualquiera O de S -que es la suma de los momentos de las
fuerzas aplicadas Fi, respecto al punto O, más los momentos mj de los pares
directamente aplicados- es también nulo, es decir:
F = ∑i Fi = 0
∑ Fx = 0 ∑ Fy = 0 ∑ Fz= 0 → F= m x a
∑ M0= ∑ (r x f )= 0
∑ Mx=0, ∑ M y=0, ∑ Mz=0.
Leyes del Movimiento de Newton : El tema de la mecánica del cuerpo rígido se
encuentra basado en las tres leyes del movimiento de Newton, cuya validez se sustenta
en la observación experimental. Estas leyes se aplican al movimiento de una partícula,
medido desde un marco de referencia no acelerado no acelerado, y pueden definirse
brevemente de la forma siguiente:
Primera Ley: Una partícula que se encuentra originalmente en reposo, o
moviéndose en línea recta con velocidad constante, permanecerá en este estado
siempre y cuando una fuerza desbalanceada no actúe sobre ésta.
EQUILOBRIO ESTATICO Página 8
Segunda Ley: Una partícula sobre la cual actúa una fuerza desbalanceada F
experimenta una aceleración a que posee la misma dirección que la fuerza y una
magnitud que es directamente proporcional a la misma. Si F se aplica a una
partícula de masa m, esta ley puede expresarse matemáticamente como
F = ma
Tercera Ley: Las fuerzas de acción y repulsión entre dos partículas son iguales
en intensidad, opuestas en sentido y colineales.
Estabilidad y Equilibrio
Un cuerpo en equilibrio estático, si no se le perturba, no sufre aceleración de traslación
o de rotación, porque la suma de todas las fuerzas u la suma de todos los momentos que
actúan sobre él son cero. Sin embargo, si el cuerpo se desplaza ligeramente, son
posibles tres resultados: (1) el objeto regresa a su posición original, en cuyo caso se dice
que está en equilibrio estable; (2) el objeto se aparta más de su posición, en cuyo caso se
dice que está en equilibrio inestable; o bien (3) el objeto permanece en su nueva
posición, en cuyo caso se dice que está en equilibrio neutro o indiferente.
Daremos los ejemplos siguientes: Una pelota colgada libremente de un hilo está en
equilibrio estable porque si se desplaza hacia un lado, rápidamente regresará a su
posición inicial. Por otro lado, un lápiz parado sobre su punta está en equilibrio
inestable; si su centro de gravedad está directamente arriba de su punta la fuerza y el
momento netos sobre él serán cero, pero si se desplaza aunque sea un poco, digamos por
alguna corriente de aire o una vibración, habrá un momento sobre él y continuaré
cayendo en dirección del desplazamiento original. Por último, un ejemplo de cuerpo en
equilibrio indiferente es una esfera que descansa sobre una mesa horizontal; si se
desplaza ligeramente hacia un lado permanecerá en su posición nueva.
En la mayor parte de los casos como en el diseño de estructuras y en trabajos con el
cuerpo humano, nos interesa mantener equilibrio estable o balance, como decimos a
veces.
• En general un objeto cuyo centro de gravedad esté debajo de su punto de apoyo,
como por ejemplo una pelota sujeta de un hilo, estará en equilibrio estable. Si el
EQUILOBRIO ESTATICO Página 9
centro de gravedad está arriba de la base o soporte, tenemos un caso más
complicado.
Por ejemplo, el bloque que separa sobre su extremo, si se inclina ligeramente regresará a
su estado original, pero si se inclina demasiado, caerá. El punto crítico se alcanza
cuando el centro de gravedad ya no cae sobre la base de soporte.
• En general, un cuerpo cuyo centro de gravedad está arriba de su base de soporte
estará en equilibrio estable si una línea vertical que pase por su centro de
gravedad pasa dentro de su base de soporte. Esto se debe a que la fuerza hacia
arriba sobre el objeto, la cual equilibra a la gravedad, sólo se puede ejercer
dentro del área de contacto, y entonces, si la fuerza de gravedad actúa más allá
de esa área, habrá un momento neto que volteará el objeto. Entonces la
estabilidad puede ser relativa.
Un ladrillo que yace sobre su cara más amplia es más estable que si yace sobre su
extremo, porque se necesitará más esfuerzo para hacerlo voltear.
En el caso extremo del lápiz, la base es prácticamente un punto y la menor perturbación
lo hará caer.
• En general, mientras más grande sea la base y más abajo esté el centro de
gravedad, será más estable el objeto.
En este sentido, los seres humanos son mucho menos estables que los mamíferos
cuadrúpedos, los cuales no sólo tienen mayor base de soporte por sus cuatro patas, sino
que tienen un centro de gravedad más bajo. La especie humana tuvo que desarrollar
características especiales, como ciertos músculos muy poderosos, para poder manejar el
problema de mantenerse parados y al mismo tiempo estable. A causa de su posición
vertical, los seres humanos sufren de numerosos achaques, como el dolor de la parte
baja de la espalda debido a las grandes fuerzas que intervienen. Cuando camina y
efectúa otros tipos de movimientos, una persona desplaza continuamente su cuerpo, de
modo que su centro de gravedad esté sobre los pies, aunque en el adulto normal ello no
requiera de concentración de pensamiento. Un movimiento tan sencillo, como el
inclinarse, necesita del movimiento de la cadera hacia atrás para que el centro de
gravedad permanezca sobre los pies, y este cambio de posición se lleva a cabo sin
reparar en él. Para verlo párese usted con sus piernas y espalda apoyadas en una pared y
trate de tocar los dedos de sus pies. Las personas que cargan pesos grandes ajustan en
EQUILOBRIO ESTATICO Página 10
forma automática su postura para que el centro de gravedad de la masa total caiga sobre
sus pies.
Principios de Equilibrio
1. Condiciones Generales de Equilibrio
a. La suma algebraica de las componentes (rectangulares) de todas las fuerzas
según cualquier línea es igual a cero.
b. La suma algebraica de los momentos de todas las fuerzas respecto cualquier
línea (cualquier punto para fuerzas coplanares) es igual a cero.
Se aplicarán en seguida estas condiciones generales de equilibrio en las varias clases de
sistemas de fuerzas, a fin de deducir las condiciones suficientes para obtener resultante
nula en cada caso.
1. Hay solo una condición de equilibrio que puede expresarse (1) ∑F = 0 o (2)
∑M8 = 0. La (1) establece que la suma algebraica de las fuerzas es cero, y la
(2) que la suma algebraica de los momentos respecto cualquier punto (no en
la línea de acción) es cero. La condición gráfica de equilibrio es que el
polígono de fuerzas queda cerrado.
2. Fuerzas Colineales
Tienen dos condiciones independientes algebraicas de equilibrio. Pueden
expresarse en tres formas:
(1) ∑Fx = ∑Fy = 0 (2) ∑Fx = ∑Ma = 0 (1)∑Ma = ∑Mb = 0
La forma (1) expresa que la suma algebraica de los componentes según los
ejes x, y (en el plano de las fuerzas) es cero; la (2) que la suma algebraica de
las componentes según cualquier eje y la suma algebraica de los momentos de
todas las fuerzas respecto a un punto es cero (el punto debe estar en el plano
de las fuerzas y la línea que lo une en la intersección de las fuerzas, debe ser
inclinado al eje tomado); la (3) se explica, asimismo, refiriéndose a momentos
respecto dos puntos no colineales con la intersección aludida. En cualquiera
de los casos anteriores la resultante es cero por lo siguiente:
EQUILOBRIO ESTATICO Página 11
1º Si existe resultante del sistema, es una sola fuerza:
y si por tanto ∑Fx = 0 y ∑Fy = 0, también R = 0.
2º Si ∑Fx = 0, si hay resultante debe ser perpendicular al eje X, y si ∑Ma = 0,
entonces el momento de R respecto al punto es cero, lo que exige que R = 0.
3º Si hay resultante, debe pasar por el punto de intersección, pero si ∑Ma = 0,
entonces R pasa por él también, y si ∑Mb = 0, R debe ser cero, no estando b
sobre c.
La condición gráfica de equilibrio es que el polígono de fuerzas quede
cerrado, pues entonces no hay resultante.
3. Fuerzas Coplanares Concurrentes
Hay dos condiciones algebraicas independientes de equilibrio.
(1) ∑F = ∑M = 0 ó (2) ∑Ma = ∑Mb = 0
Se enuncian similarmente al caso anterior. Ambas condiciones son suficientes
para hacer la resultante igual a cero. En efecto, si hay resultante será una
fuerza o un par. Si (1) ∑F = 0, la resultante no es una fuerza, y si ∑Ma = 0, no
es un par; por lo tanto, no hay resultante. (2) Si ∑Ma = 0, la resultante no es
un par sino una fuerza que pasa por a; y si también ∑Mb = 0, el momento de
la resultante respecto a b debe ser cero, lo que implica que la fuerza es cero.
Gráficamente, hay dos condiciones de equilibrio; el polígono de fuerzas y el
funicular deben cerrar porque en el primer caso si hay resultante será un par,
pero con la condición segunda no existirá el par.
4. Fuerzas Coplanares, No Concurrentes y Paralelas
Hay tres condiciones independientes algebraicas de equilibrio:
(1) ∑Fx = ∑Fy = ∑Ma = 0
(2) ∑Fx = ∑Ma = ∑Mb= 0
(3) ∑Ma = ∑Mb = ∑Mc= 0
EQUILOBRIO ESTATICO Página 12
Y se ha explicado, lo que significan las expresiones anteriores. Hay que
advertir que los ejes x, y, de las componentes y los orígenes de momentos
deben estar en el plano de las fuerzas, y los tres puntos a, b, c, no deben ser
colineales. Estas tres condiciones bastan para dar resultante igual a cero. En
efecto, si existe resultante será una fuerza o un par. Si en (1), ∑Fx = ∑Fy = 0,
la resultante no es fuerza, pero si ∑M = 0, no es un par y no habrá resultante.
En (2), si ∑Fx = 0, la resultante es perpendicular al eje o un par; si ∑Ma = 0,
no es un par sino una fuerza que pasa por a y perpendicular al eje; si además,
∑Mb = 0, el momento de esa fuerza respecto a b es cero, y por tanto, la fuerza
es cero. En (3), si ∑Ma = 0, la resultante no es un par sino una fuerza que
pasa por a; si además, ∑Mb = 0, la resultante pasa por b, pero si ∑Mc = 0,
esta resultante será cero.
5. Fuerzas Coplanares, No Concurrentes y No Paralelas.
Hay tres condiciones independientes algebraicas de equilibrio. Se expresan:
∑Fx = Fy = ∑Fz = 0
es decir, la suma algebraica de las componentes según tres ejes rectangulares
x, y, z, es cero, pues si existe resultante será igual a:
6. Fuerzas No Coplanares Concurrentes
Hay tres condiciones independientes que se expresan en dos formas:
(1) ∑F = ∑M1 = ∑M2= 0 y (2) ∑M1 = ∑M2 = ∑M3 = 0
La forma (1) expresa que la suma algebraica de las fuerzas, y la de los
momentos respecto dos ejes perpendiculares a las fuerzas pero no paralelas
entre sí, es igual a cero; y la (2), que la suma algebraica de los momentos
respecto tres ejes no concurrentes, no paralelos y perpendiculares a las
fuerzas, es cero. En efecto, en (1), si ∑F = 0, la resultante no es una fuerza, si
además ∑M1 = 0, la resultante es un par cuyo plano es paralelo al primer eje
de momento y a las fuerzas; y si ∑M2=0, ese plano será también paralelo al
segundo eje; pero estas condiciones de paralelismo no pueden realizarse sino
EQUILOBRIO ESTATICO Página 13
cuando las fuerzas del par son colineales, en cuyo caso se balancean, y no hay
resultante. En (2), si ∑M1=∑M2 = 0, la resultante será una fuerza que pasa
por la intersección de los ejes 1 y 2; si además ∑M3 = 0, esa fuerza será cero,
y no existirá resultante.
7. Fuerzas No Coplanares Paralelas
Hay seis condiciones algebraicas independientes de equilibrio:
∑Fx = ∑Fy = ∑Fz = ∑Mx = ∑My = ∑Mz = 0
Es decir, la suma algebraica de las componentes de todas las fuerzas según
tres líneas, y la de los momentos con respecto a tres ejes no coplanares es
cero. Por lo general, es conveniente tomar las tres líneas y los ejes
perpendiculares entre sí. En efecto, si hay resultante, será una línea o un par,
si las componentes según las líneas son cero, la fuerza será cero, y si los
momentos son cero, el par no existe y no hay resultante.
8. Fuerzas No Coplanares, No Concurrentes y No Paralelas
Ciertas condiciones especiales de equilibrio dependientes del número de
fuerzas en el sistema, son de gran uso. Son las siguientes:
1. Una fuerza simple no puede estar en equilibrio.
2. Si dos fuerzas están en equilibrio son necesariamente colineales, iguales
y opuestas.
Si F´y F´´ son concurrentes su resultante es concurrente con ellas y
también F´´´; si son paralelas, entonces R, y por tanto F´´´, es paralela a
ellas.
Cuando las tres fuerzas son concurrentes, cada una de ellas es
proporcional al seno del ángulo de los otros dos (Teorema de Laml). Por
lo tanto:
donde a, b, c, son los ángulos aludidos. Estas ecuaciones de deducen
aplicando el principio de los senos al triángulo de las fuerzas. Cuando
EQUILOBRIO ESTATICO Página 14
las tres fuerzas son paralelas, las dos exteriores tienen la misma
dirección, y la central es opuesta los momentos de dos de cualquiera de
esas fuerzas respecto un punto sobre la tercera, son iguales en magnitud
y opuestas en signo.
3. Si tres fuerzas están en equilibrio, deben ser coplanares y concurrentes o
paralelas. En efecto, si las fuerzas con F´, F´´, F´´´, desde que F´ y F´´
balancea a F´´´, tendrán una resultante colineal con ésta, y en tal caso
están en el mismo plano que F´´´.
4. Si cuatro fuerzas coplanares están en equilibrio, la resultante de dos de
ellas balancea las otras dos. Por tanto: a) si las dos primeras son
concurrentes y las otras también, la resultante pasa por los dos puntos de
concurrencia; b) si dos son concurrentes y las otras paralelas, la
resultante de las primeras actúa por el punto de concurrencia y es
paralela a las otras; c) si las cuatro fuerzas son paralelas, la resultante
también les es paralela. Los principios (a) y (b) se usan en el análisis
gráfico de los sistemas de cuatro fuerzas.
9. Condiciones Especiales de Equilibrio
La palabra "cuerpo"se usa en Mecánica en forma amplia para denominar
cualquier porción definida de materia, simple o rígida, como una piedra,
tablón, etc., o compleja como un puente, máquina, etc., o fluida como el agua
en un depósito, etc. De tal modo, cualquier parte de uno de esos elementos
puede llamarse "cuerpo", si esa parte tiene especial interés para tomarse por
separado.
Conviene distinguir entre fuerzas externas e internas con referencia a un
cuerpo determinado. Es externa a un cuerpo si ejerce sobre él por otro cuerpo;
es interna si se ejerce en parte del cuerpo por otra parte del mismo cuerpo.
Con referencia a un cuerpo, todas las fuerzas externas tomadas en conjunto se
llaman el sistema externo, y las interiores en conjunto el sistema interno.
Cuando un cuerpo está inmóvil, todas las fuerzas externas e internas que
actúan sobre el, constituyen un sistema de equilibrio. El sistema interno está
constituido por fuerzas que mutuamente se balancean y por tanto, el sistema
externo también se halla balanceado. Puede, en consecuencia, decirse que el
EQUILOBRIO ESTATICO Página 15
sistema externo de las fuerzas que actúan en un cuerpo inmóvil está en
equilibrio.
10. Fuerzas Externas e Internas
11. Diagrama de Cuerpo Libre
Los párrafos siguientes se refieren a aplicaciones de las condiciones de equilibrio. Estas
condiciones deben aplicarse, por cierto, a un sistema equilibrado, y su uso exige la
consideración previa de un sistema que comprende las fuerzas por estudiar. Esto se hace
considerando el cuerpo inmóvil dado por sí solo, con las fuerzas que actúan sobre él. Se
centra así el diagrama del cuerpo libre, que es un dibujo mostrando:
1) el cuerpo solo, asilado de otros cuerpos.
2) todas las fuerzas externas que se ejercen sobre dicho cuerpo.
En ese diagrama no aparecerán las fuerzas ejercidas por el cuerpo, sino las que se
ejercen sobre él, y tampoco incluirá fuerzas interiores. Se ha dicho que las fuerzas
externas son en general las debidas a la atracción de la Tierra, o las ocasionadas por
contacto. Esas fuerzas son por tanto usualmente la de gravitación, más el número de
contacto entre el cuerpo dado y otros cuerpos. Se dan enseguida ejemplos sobre la
representación del diagrama del cuerpo libre.
Torque de una Fuerza
Cuando se aplica una fuerza en algún punto de un cuerpo rígido, el cuerpo tiende a
realizar un movimiento de rotación en torno a algún eje. La propiedad de la fuerza para
hacer girar al cuerpo se mide con una magnitud física que llamamos torque o momento
de la fuerza. Se prefiere usar la palabra torque y no momento, porque esta última se
emplea para referirnos al momento lineal, momento angular o momento de inercia, que
son todas magnitudes físicas diferentes para las cuales se usa una misma palabra.
Analizaremos cualitativamente el efecto de rotación que una fuerza puede producir
sobre un cuerpo rígido. Consideremos como cuerpo rígido a una regla fija en un punto
O ubicado en un extremo de la regla, sobre el cual pueda tener una rotación, y
EQUILOBRIO ESTATICO Página 16
describamos el efecto que alguna fuerza de la misma magnitud actuando en distintos
puntos, produce sobre la regla fija en O.
Se define el torque T de una fuerza F que actúa sobre algún punto del cuerpo rígido, en
una posición r respecto de cualquier origen O, por el que puede pasar un eje sobre el
cual se produce la rotación del cuerpo rígido, al producto vectorial entre la posición r y
la fuerza aplicada F.
T = r x F
El torque es una magnitud vectorial, si q es el ángulo entre r y F, su valor numérico por
definición del producto vectorial
Su dirección es siempre perpendicular al plano de los vectores r y F
Por convención se considera el torque positivo o negativo si la rotación que produce la
fuerza es en sentido antihorario u horario respectivamente.
El torque de una fuerza depende de la magnitud y dirección de F y de su punto de
aplicación respecto de un origen O. Si la fuerza F pasa por O, r = 0 y el torque es cero.
Si q = 0 o 180º, es decir, F está sobre la línea de acción de r, F senq = 0 y el torque es
cero. F senq es la componente de F perpendicular a r, sólo esta componente realiza
torque, y se le puede llamar F┴.
EQUILIBRIO EN DOS DIMENCIONES
CUERPO RIGIDO EN DOS DIMENCIONES
Todas las fuerzas que actúan el mismo cuerpo están en el mismo plano, para fines de
analizar, se puede tratar el cuerpo como bidimensional o plana. Dicho cuerpo se puede
definir de manera adecuada por sus dimensiones del plano, la tercera dimensión del
cuerpo es la dirección perpendicular al plano de las fuerzas, no es necesario en el
análisis y normandamente no es específica.
EQUILOBRIO ESTATICO Página 17
El análisis de los sistemas bidimensionales es más simple que de los sistemas
tridimensionales, ya que son más fáciles de respetar mentalmente y consecuencia que se
puede usar el enfoque escalar intuitivo.
MOMENTO ESCALAR DE UNA FUERZA- ENFOQUE ESCALAREn el momento de una fuerza con respecto a un punto se define como la fuerza
multiplicada por la distancia perpendicular del punto a la línea de acción de la fuerza. El
momento es una medida por la torsión se usa también en ocasiones para en momento.
PRODUCTO CRUZ DE VECTORES UNITARIOS CARTESIANOSSe define los vectores cartesianos i, j , k como vector de magnitud unitario en las
direcciones mutuamente perpendiculares en x , y , z do0nde el objetivo es determinar el
producto cruz de este vector unitarios de estos mínimos y entre sí.
Considerando el sistemas de las coordenadas mutuamente perpendiculares que aparece
con los vectores unitarios i, j, k dirigido a lo largo de las partes positivas del eje x , y , z
respectivamente, el producto cruz del vector unitario i consigo mismo, o sea i x i da
igual a un vector de magnitud igual a (i)(i)(sen0°)=(1)(1)(0)=0asi i x i=0 de modo
semejante, se puede demostrar que el producto cruz j x j y k x k son también iguales a
cero.
MOMENTO COMO VECTORESEl momento es una fuerza respecto a un punto 0 puede definirse como el producto cruz
de un vector de posición R que va desde el punto 0 hasta cualquier punto de la línea de
acción de F. Así.
Mo = r x F
El momento con dirección al eje X que pasa por el punto O Y y perpendicular al plano
que contiene el vector de posición r y el vector de fuerza f en el sentido del vector Mo
que se define por una regla.
TEOREMA DE VARIGNONEl método para determinar el momento de una fuerza como respecto al punto como una
suma de los momentos de las componentes de la fuerza con respecto al punto, el medio
más conveniente para determinar momentos en varias aplicaciones de ingeniería. Este
teorema estable como el momento de resultante de fuerzas concurrentes con respecto a
EQUILOBRIO ESTATICO Página 18
cualquier punto es igual a la suma de momentos de las componentes con respecto a ese
punto. Si se considera con unos sistemas de fuerzas concurrentes que actúa sobre un
cuerpo, su resultante de sistema de fuerza es:
R=F1+ F2 + F3 + F4
El momento resultante con respecto a un punto O esta dado por:
Mo = r x R = r x R=r x (F1 + F2 + F3 + F4)
Donde r es el vector de posición desde un punto O hasta él junto de aplicación de
fuerzas, a aplicar la propiedad distributiva de producto cruz de los vectores como se
puede dar es:
Mo = r X R = r x F1 + r x F2 + r x F3 + r x F4
Diagramas de cuerpo libre
es la aplicación correcta de la ecuaciones de equilibrio por que requiere una
especificación completa de todas las fuerzas externas conocidas y desconocidas que
actúan sobre el cuerpo. La mejor manera de describir tales fuerzas es dibujando un
diagrama de cuerpo libre de aquel. Este diagrama es un bosquejo que lo representa a la
figura aislado o “libre”. En este bosquejo es necesario que se muestren todas las fuerzas
y momentos de par que el medio ambiente ejerce sobre el cuerpo.
Por esta razón, el conocimiento detallado de como dibujar un diagrama de cuerpo libre
es de fundamental importancia en la resolución de los problemas.
REACCIONES EN LOS PUNTOS DE APOYO Y CONECCIONES DE UNA ESTRUCTURA BIDIMENCIONAL
Reacciones en los Soportes (Puntos de Apoyo) y en las Conexiones de una Estructura.
Los apoyos de vigas, son los elementos que le proporcionan la estabilidad a la viga y
por lo general, se encuentran en los extremos o cerca de ellos. Las fuerzas en los apoyos
que se generan son productos de las cargas aplicadas y se llaman reacciones y equilibran
EQUILOBRIO ESTATICO Página 19
las cargas aplicadas. Analíticamente estas reacciones representan las incógnitas de un
problema matemático. Las reacciones se pueden dividir en tres grupos que corresponden
al tipo de apoyo que se está empleando:
Reacciones equivalentes a una fuerza cuya línea de acción es conocida.
Reacciones equivalentes a una fuerza de magnitud y dirección desconocidas.
Reacciones equivalentes a una fuerza y un par.
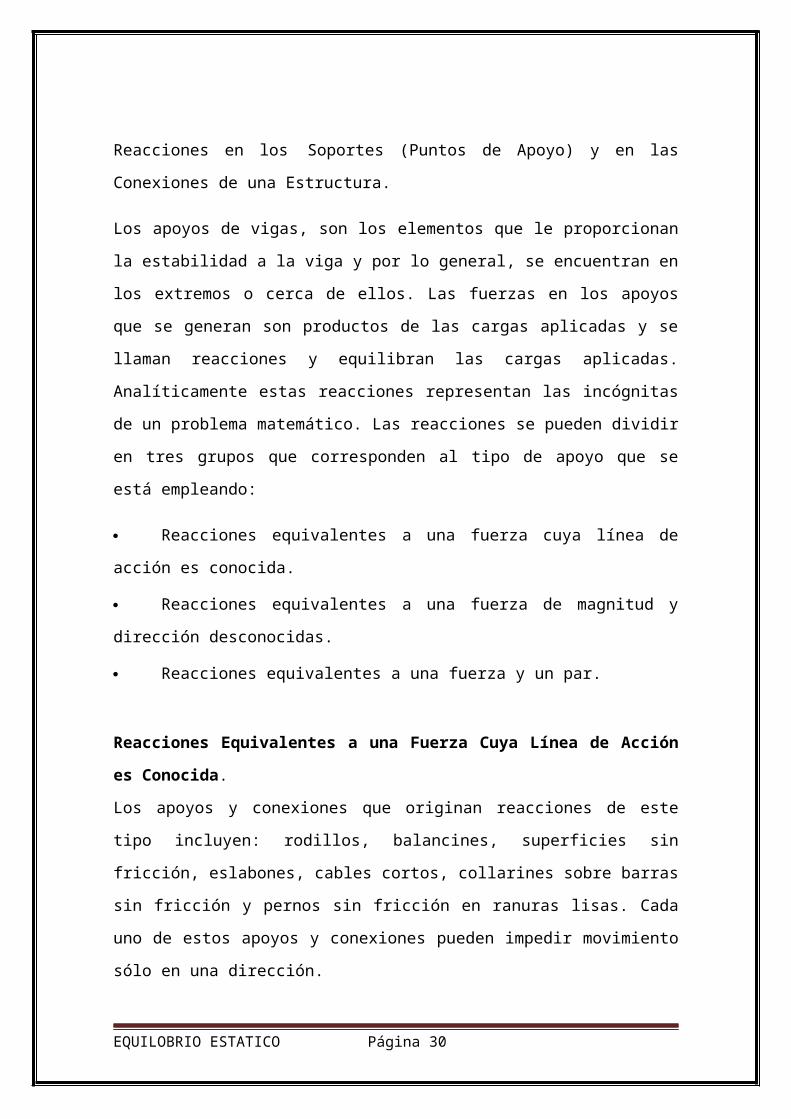
Reacciones Equivalentes a una Fuerza Cuya Línea de Acción es Conocida.
Los apoyos y conexiones que originan reacciones de este tipo incluyen: rodillos,
balancines, superficies sin fricción, eslabones, cables cortos, collarines sobre barras sin
fricción y pernos sin fricción en ranuras lisas. Cada uno de estos apoyos y conexiones
pueden impedir movimiento sólo en una dirección.
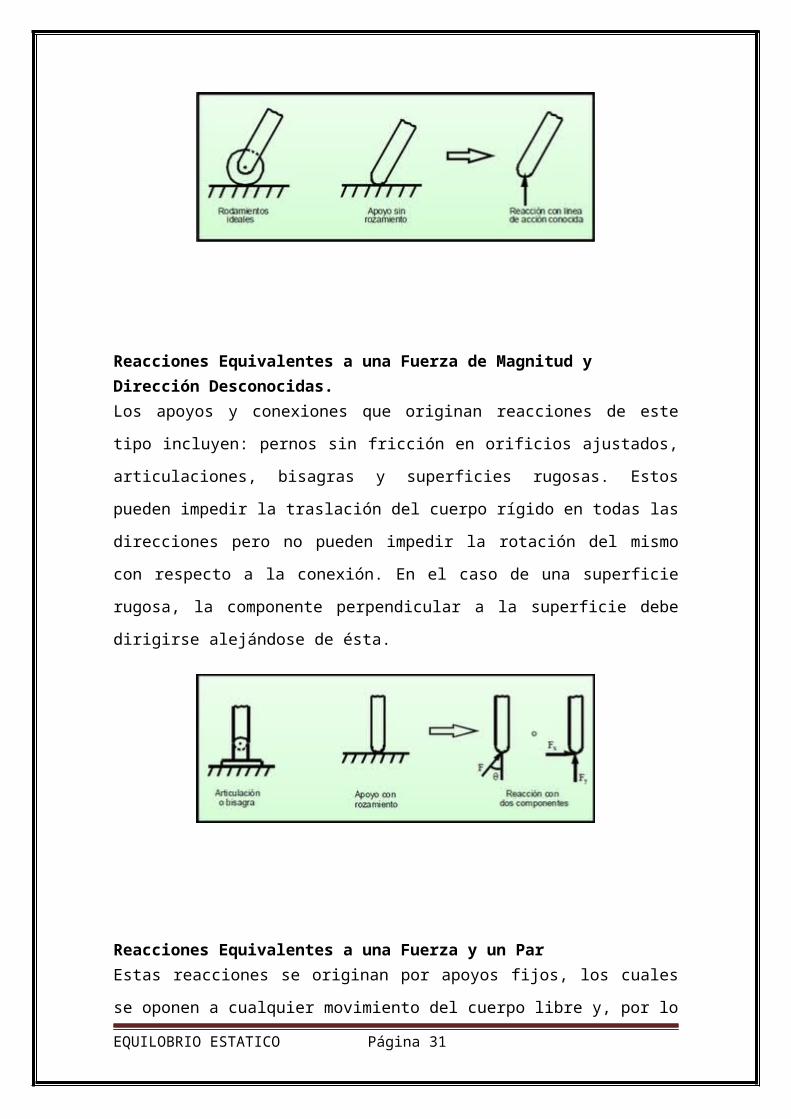
Reacciones Equivalentes a una Fuerza de Magnitud y Dirección Desconocidas.Los apoyos y conexiones que originan reacciones de este tipo incluyen: pernos sin
fricción en orificios ajustados, articulaciones, bisagras y superficies rugosas. Estos
pueden impedir la traslación del cuerpo rígido en todas las direcciones pero no pueden
impedir la rotación del mismo con respecto a la conexión. En el caso de una superficie
rugosa, la componente perpendicular a la superficie debe dirigirse alejándose de ésta.
EQUILOBRIO ESTATICO Página 20
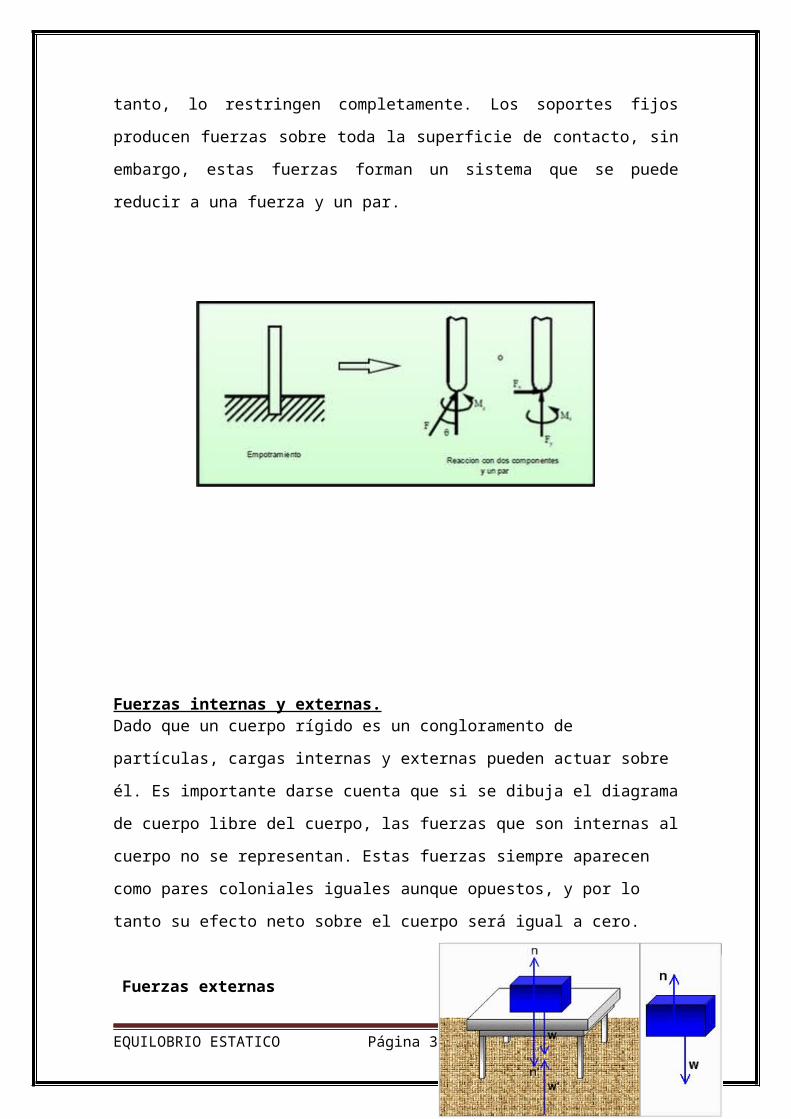
Reacciones Equivalentes a una Fuerza y un ParEstas reacciones se originan por apoyos fijos, los cuales se oponen a cualquier
movimiento del cuerpo libre y, por lo tanto, lo restringen completamente. Los soportes
fijos producen fuerzas sobre toda la superficie de contacto, sin embargo, estas fuerzas
forman un sistema que se puede reducir a una fuerza y un par.
Fuerzas internas y externas.Dado que un cuerpo rígido es un congloramento de partículas, cargas internas y externas
pueden actuar sobre él. Es importante darse cuenta que si se dibuja el diagrama de
cuerpo libre del cuerpo, las fuerzas que son internas al cuerpo no se representan. Estas
EQUILOBRIO ESTATICO Página 21
fuerzas siempre aparecen como pares coloniales iguales aunque opuestos, y por lo tanto
su efecto neto sobre el cuerpo será igual a cero.
Fuerzas externas
Representan la acción que ejercen otros cuerpos
sobre el cuerpo rígidos, son las responsables del
comportamiento externo del cuerpo rígido,
causarán que se mueva o aseguraran su reposo.
Fuerzas internas:
Son aquellas que mantienen unidas las partículas
que conforman el cuerpo rígido.
Se puede concluir que cada una de las fuerzas
externas que actúan sobre un cuerpo rígido puede
ocasionar un movimiento de traslación, rotación o
ambas siempre y cuando dichas fuerzas no
encuentren ninguna oposición.
Para que un cuerpo rígido tenga equilibrio estático se debe cumplir que:
• La sumatoria de las fuerzas aplicadas sobre el cuerpo sean iguales a cero, no
existe aceleración lineal.
• La sumatorias de los torques que actúen sobre el cuerpo sean iguales a cero, no
existe aceleración angular
EQUILOBRIO ESTATICO Página 22
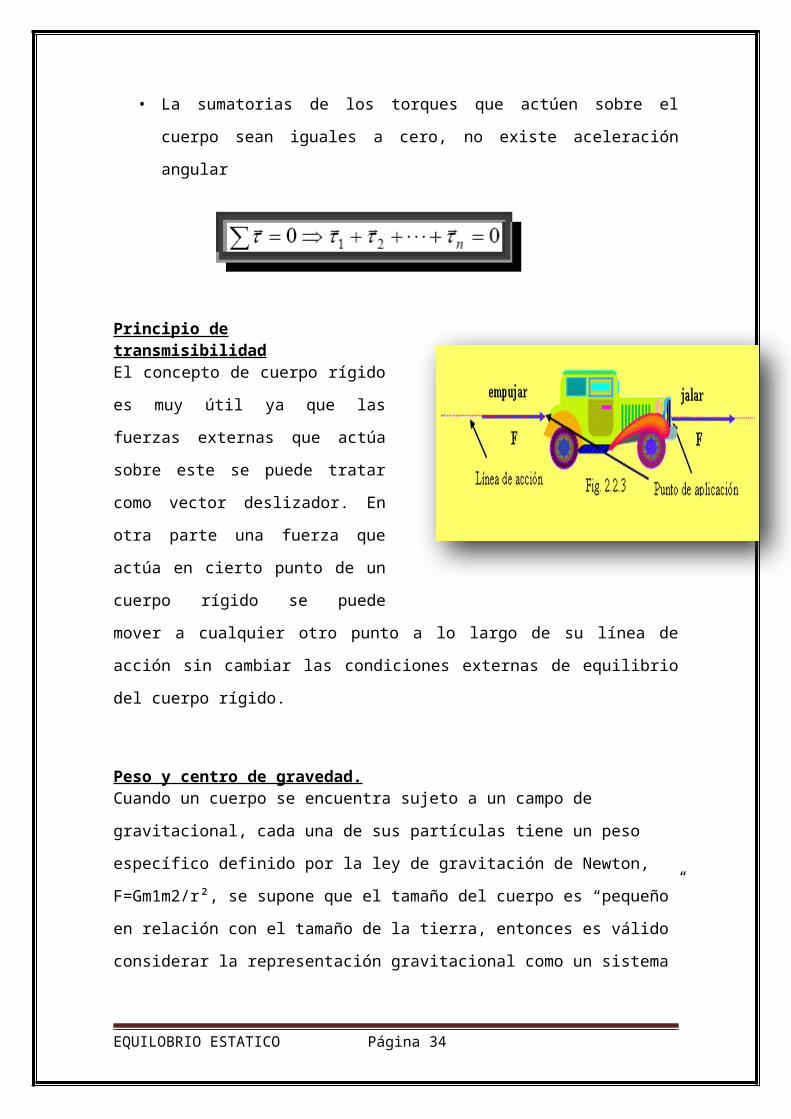
Principio de transmisibilidadEl concepto de cuerpo rígido es muy útil ya
que las fuerzas externas que actúa sobre este
se puede tratar como vector deslizador. En
otra parte una fuerza que actúa en cierto
punto de un cuerpo rígido se puede mover a
cualquier otro punto a lo largo de su línea de
acción sin cambiar las condiciones externas
de equilibrio del cuerpo rígido.
Peso y centro de gravedad.Cuando un cuerpo se encuentra sujeto a un campo de gravitacional, cada una de sus
partículas tiene un peso específico definido por la ley de gravitación de Newton,
F=Gm1m2/r², se supone que el tamaño del cuerpo es “pequeño” en relación con el
tamaño de la tierra, entonces es válido considerar la representación gravitacional como
un sistema de fuerzas paralelas actuando sobre las partículas contenidas dentro de los
límites del cuerpo.
CONDICIÓN DE EQUILIBRIO DE UN CUERPO QUE DESCANSA SOBRE UN PLANO.-
Para que un cuerpo que descansa sobre un plano esté en equilibrio es preciso que la
vertical del centro de gravedad pase por el interior de la base de sustentación. Se llama
base de sustentación la superficie de apoyo del cuerpo o también el polígono que se
forma al unir los diversos puntos de apoyo, cuando son varios (una silla, por ejemplo).
ESTRUCTURAS ESTATICAMENTE DETERMINADAS
Las conexiones que se pueden ejercer las diferentes tipos de apoyo soportes y
conexiones sobre un cuerpo en esta reacción se examina la cantidad y las disposiciones
de las reacciones necesarias pararía en equilibrio de un cuerpo rígido sujeto a fuerzas
coplanares. Si consideramos un cuerpo esta estáticamente determinado en forma externa
si pueden determinarse todas sus reacciones al resolver las ecuaciones de equilibrio.
EQUILOBRIO ESTATICO Página 23
CENTRO DE MASAEs la posición geométrica de un cuerpo rígido en la cual se puede considerar
concentrada toda su masa; corresponde a la posición promedio de todas las partículas de
masa que forman el cuerpo rígido. El centro
de masa de cualquier objeto simétrico
homogéneo, se ubica sobre un eje de simetría.
En forma más sencilla podemos decir que el centro de masa es el punto en el cual se
puede considerar concentrada toda la masa de un objeto o un sistema. Cuando se estudia
el movimiento de un cuerpo rígido se puede considerar la fuerza neta aplicada en el
centro de masa y analizar el movimiento de este último como si fuera una partícula.
Cuando la fuerza es el peso, entonces se considera aplicado en el centro de gravedad.
Para casi todos los cuerpos cerca de la superficie terrestre, el centro de masa es
equivalente al centro de gravedad, ya que la gravedad es casi constante, es decir, si la
gravedad es constante en toda la masa, el centro de gravedad coincide con el centro de
masa.
Procedimiento para dibujar un diagrama del cuerpo librePara construir un diagrama de cuerpo libre de un cuerpo rígido o grupo de cuerpos
consideramos como un un sistema, se debe llevar acabo los siguientes pasos:
Paso 1. Imagina que el cuerpo se encuentra aislado o “libre” de sus restricciones y
conexiones, y dibuje (bosqueje) su forma.
Pasó 2. Identifique todos los momentos de par y de fuerzas externas que actúen sobre el
cuerpo; aquellas que generalmente se encuentran se deben a (1) CARGAS
APLICADAS, (2) reacciones que ocurren en los soportes o puntos de contactos con
otros cuerpos y (3) el peso del cuerpo. Para analizar estos efectos, será de utilidad trazar
el contorno de los cuerpos, tomando en cuenta cuidadosamente cada fuerza o momento
de par actuando sobre el.
EQUILOBRIO ESTATICO Página 24
Pasó 3. Identifique las dimensiones del cuerpo necesarias para calcular los momentos
de la fuerzas. Los momentos de los pares y de fuerzas que se conocen deberán de
colocase con sus direcciones y magnitudes correctas. Se utilizan letras para representar
las magnitudes y ángulos directores de la fuerza y momentos de par que se
descomponen. Establezca un sistema coordenado X y Y para que puedan ser despejadas
esas incógnitas. En particular si un fuerza o momento de par tiene una línea de acción
conocida aunque una magnitud desconocida, se puede suponer la punta de la flecha que
define el sentido del vector. Después de resolver las ecuaciones de equilibrio para la
magnitud desconocida, el sentido de las fuerzas se volverá claro. Por definición, la
magnitud de un vector es siempre positivo, de tal forma que si la solución de un escalar
“negativo”, el signo del vector indica que el sentido del vector es el opuesto al que
originalmente se supuso.
Miembros de dos fuerzas. Cuando un miembro está sujeto a momento de par y se les
aplican fuerzas en solo dos puntos, este se llama miembro de dos fuerzas. Estas fuerzas
mantendrán el equilibrio de fuerzas (ΣF = 0) siempre y cuando la fuerza Fa tenga igual
magnitud aunque dirección opuesta a Fb. La línea de acción de ambas fuerzas es
conocida, puesto que está siempre pasa a través de A y B. de aquí que, solo la magnitud
de la fuerza debe determinarse o establecerse.
Miembros de tres fuerzas. Si un miembro está sujeto a tres fuerzas solamente, e
necesario que estas sean concurrentes o paralelas para que el miembro permanezca en
equilibrio. Supongamos que cualquier par de fuerza de las tres actúan sobre un cuerpo,
esta tiene líneas de acción que se intersectan en el punto O. lo cual hace que el sistema
sea fe fuerzas concurrentes. Si dos de las fuerzas son paralelas, se considera que el
punto de concurrencia, O, está en el “infinito” y la tercera fuerza debe ser paralela a las
otras dos para que se intercepten en dicho “punto”.
EQUILIBRIO EN TRES DIMENCIONES
EQUILIBRIO DE CUERPO RIGIDO EN EL ESPACIO
EQUILOBRIO ESTATICO Página 25
R=O R=Rxi + Ryj + Rzk (N)=O
∑ FX=Rx=O
∑ FY=Ry=O
∑ Fz=Rz=O
Mo=M x i + M j y + Mz k (n . m)=O
∑ Mx=¿ Mx=O ¿
∑ My=My=O
∑ MZ=MZ=O
n N° de incógnitas
q N° de E.E.E
q=6 E.E.E.
n=6
n=q E. ISISTATICA.
N>q E. HIPERESTATICA.
N<q E. HIPOSTATICA.
Equilibrio isostático e hiperestático.Sistemas isostáticos e hiperestáticos En la estática el
objetivo suele ser determinar en primer lugar las
congelaciones o cargas exteriores para el equilibrio,
para a continuación calcularlas reacciones en los
enlaces o apoyos.
Los casos particulares comentados en el apartado
anterior corresponden sustentaciones que dejan al
sistema con algún grado de libertad. Al permitir el
movimiento, se necesita para el equilibrio que una o más componentes de las fuerzas o
momentos sean nulos.
Si se aumenta el número de coacciones del sólido, se llega a un punto en que no se
permite ningún grado de libertad de movimiento: el sistema estará entonces en
EQUILOBRIO ESTATICO Página 26
equilibrio para cualquier conjunto de cargas exteriores (siempre que no se supere la
resistencia de rotura de los enlaces)
CONCEPTO EQUILIBRIO DE UN CUERPO RÍGIDO EN EL ESPACIO
El equilibrio o capacidad de orientación correctamente el cuerpo en el espacio, se
consigue a través de una ordenada relación entre el esquema corporal y el mundo
exterior
el número de grados de libertad de un sistema es el número de coordenadas
independientes necesarias para especificar completamente su configuración.
Vamos a calcular cuántos grados de libertad tiene un sólido rígido libre
En el espacio. Recordemos que un sólido rígido es un
sistema formado por N partículas talque la distancia entre
dos cualesquiera de esas partículas permanece constante.
Para ver cuántos grados de libertad tiene un sólido rígido
podemos usar el siguiente razonamiento. Para determinar
la posición de un punto A del solido rígido son necesarias
tres coordenadas. Conocida la posición de A, para
determinar la posición de un segundo punto B del sólido
rígido solo hacen falta dos coordenadas adicionales,
puesto que B está sobre una superficie:
La esfera con centro en A y radio la distancia entre A y B, d A B, que sabemos que es
constante Finalmente, conocidas las posiciones de Ay B, para determinar la posición de
un tercer punto C necesitamos sólo una nueva coordenada, puesto que C está sobre una
curva: la circunferencia que se obtiene al intersecar la esfera con centro en A y radio d
A C con otra esfera con centro en B y radio D b c, Si A, B y C no están alineados,
cualquier otro punto del sólido rígido quedara determinado por las distancias fijas y
conocidas) entre ´él y estos tres puntos.
EQUILOBRIO ESTATICO Página 27
ECUACIONES BÁSICAS DE EQUILIBRIO
Las ecuaciones que describen el equilibrio estático son planteadas en la primera ley de
Newton y controlan los movimientos del cuerpo en traslación y rotación.
y
Dos ecuaciones vectoriales que se convierten en seis ecuaciones escalares, tres de
traslación y tres de rotación.
,
Estas tres corresponden a tres posibles formas de desplazamiento, es decir, tres
Grados de libertad del cuerpo y
Corresponden a tres grados de libertad de rotación.
En total representan seis formas de moverse, seis grados de libertad para todo cuerpo en
el espacio.
Para estructuras planas basta con plantear tres ecuaciones que representen los tres
grados de libertad del cuerpo, dos desplazamientos y una rotación:
EQUILOBRIO ESTATICO Página 28
DIAGRAMA DE CUERPO LIBRE
PROSESO DE DESARROLLODE DIAGRAMA DE CUERPO LIBRE:1:_identificar clave el objetivo que se va aislar en el diagrama de cuerpo libre.
2:_decidir si el objetivo seba a modelar como una partícula como un cuerpo rígido en
dos o en tres dimensiones.
3:_representar con precisión las dimensiones del objetivo, obtenido como n diagrama
especial, el cuerpo puede ser un objeto, y dibujar el diagrama.
4:_ailar el objeto de sus soportes y de otros cuerpo y muestre todas las fuerzas o
momentos externos q actúan sobre el cuerpo en su punto de aplicación.
5:_contar el número de fuerzas y momentos desconocidos que aparecen en el diagrama
de cuerpo libre y determinar las ecuaciones de equilibrio para desarrollar el problema.
Los párrafos siguientes se refieren a aplicaciones de las condiciones de equilibrio. Estas
condiciones deben aplicarse, por cierto, a un sistema equilibrado, y su uso exige la
consideración previa de un sistema que comprende las fuerzas por estudiar. Esto se hace
considerando el cuerpo inmóvil dado por sí solo, con las fuerzas que actúan sobre él. Se
centra así el diagrama del cuerpo libre, que es un dibujo mostrando: 1) el cuerpo solo,
asilado de otros cuerpos, y 2) todas las fuerzas externas que se ejercen sobre dicho
cuerpo. En ese diagrama no aparecerán las fuerzas ejercidas por el cuerpo, sino las que
se ejercen sobre él, y tampoco incluirá fuerzas interiores. Se ha dicho que las fuerzas
externas son en general las debidas a la atracción de la Tierra, o las ocasionadas por
contacto. Esas fuerzas son por tanto usualmente la de gravitación, más el número de
contacto entre el cuerpo dado y otros cuerpos. Se dan enseguida ejemplos sobre la
representación del diagrama del cuerpo libre.
EQUILOBRIO ESTATICO Página 29
TIPOS DE APOYOS DE CUERPOS RIGIDOS EN EL ESPACIO
1._ARTICULACION:
2._SUPERFICIE LISA:
Una incógnita. La reacción es una fuerza que actúa perpendicularmente a la superficie
en un punto de contacto.
3._ SUPERFICIE CON RIEL:
EQUILOBRIO ESTATICO Página 30
4._ COGINETE SIMPLE
Cinco incógnitas. Las reacciones son tres fuerzas y dos componentes de momentos de
par.
5._COGINETE DE EMPUJE
Cinco incógnitas. Las reacciones son tres fuerzas y dos componentes de momentos de
par.
Las reacciones consiste de tres componentes de fuerza y dos pares los momentos de los
pares actúa sobre un plano perpendicular al eje de la fecha del la articulación las
magnitudes de las tres componentes de la fuerza y de las dos componentes del momento
son las cinco incógnitas.
EQUILOBRIO ESTATICO Página 31
6._ BISABRA
Cinco incógnitas. Las reacciones son tres fuerzas y dos componentes de momento de
par.
7._EMPOTRAMIENTO O APOYO FIJO
Seis incógnitas. Las reacciones consisten de una fuerza y de un par ambos de magnitud
y dirección desconocidas. Las fuerzas de reacción y el par se representan generalmente
por sus componentes rectangulares de las tres componentes de fuerza y los tres
componentes de momentos de las seis incógnitos.
ECUACIONES DE EQUILIBRIOLas condiciones de equilibrio de un cuerpo rígido sujeto a un sistema de fuerzas
tridimensional requiere que la fuerza resultante y el momento de pares resultante
actuando sobre el cuerpo sea igual a cero.
Ecuaciones vectoriales de equilibrio. Las dos condiciones para el equilibrio de un
cuerpo rigido expresarse matemáticamente en forma vectorial como
EQUILOBRIO ESTATICO Página 32
∑ M=0
∑ Μ ο=0
Donde la ∑ F es la suma vectorial de todas las fuerzas externas actuando sobre el
cuerpo y ∑ Mo es la suma de los momentos de par O ubicado dentro y fuera del cuerpo.
Ecuaciones escalares de equilibrio. Si todas las fuerzas externas y momentos de par
aplicados se expresan en forma vectorial cartesina y se sustituyen en las ecuaciones.
∑ F=∑ Fxi+∑ Fyj+∑ Fzk=0
∑ Mo=∑ Mxi+∑ Myj+∑ zk=0
Puesto que las componentes i,j y k son independientes una de la otra, las ecuaciones
anteriores se satisfacen siempre y cuando.
∑ Fx=0
∑ F y=0
∑ Fz=0
∑ Mx=0
∑ My=0
∑ Mk=0
EQUILOBRIO ESTATICO Página 33
Estas seis ecuaciones escalares del equilibrio pueden utilizarse para resolver como
máximo seis incógnitas en el diagrama de cuerpo libre. Las fuerzas que actúan en las
direcciones X, Y y Z deben ser igual a cero y los momentos en los ejes X, Y y Z deben
de ser igual a cero.
EJEMPLOSANÁLISIS DE LAS CERCHAS
Las cerchas como todo cuerpo rígido tiene puntos de apoyos, los cuales son los mismos
que se han indicado en el apartado de Equilibrio de Cuerpos Rígidos, exceptuando los
empotramientos. Por lo tanto, las condiciones de apoyo de una cercha son: Apoyos fijos
y móviles. Si la cercha tuviese dos apoyos móviles sería totalmente inestable, si tuviese
dos apoyos fijos sería estáticamente indeterminada. Por lo tanto, las cerchas estudiadas
en este apartado poseerán dos apoyos; uno fijo y otro móvil.
El objetivo del análisis de una cercha es llegar a conocer las fuerzas en los apoyos y en
las barras. Para ello, se emplea el equilibrio estático y las ecuaciones de estática.
Podemos decir, que este análisis tiene dos etapas. Una etapa externa donde se analizan
solo las fuerzas externas a la cerchas, incluyendo la que actúan en los apoyos. En el
análisis interno se toman en cuenta todas las fuerzas que actúan sobre las cerchas, las
reacciones y las fuerzas en las barras. Mediante el análisis externo se calculan las
reacciones en los apoyos y mediante el análisis interno se obtienen las fuerzas en las
barras.
El análisis de las estructura consiste en la aplicación del equilibrio estático a todas las
partes que la conforman. Las condiciones estáticas son de gran importancia en las obras
de ingeniería, ya que ellas condicionan el desempeño de las estructuras y su vida útil
durante la acción de las fuerzas sobre ellas.
EQUILOBRIO ESTATICO Página 34
EQUILOBRIO ESTATICO Página 35
Conclusiones
La estatica por su parte es la que se encarga del estudio de las condiciones de equilibrio
de los cuerpos sometidos a una fuerza.
es parte de la física tiene relación con el movimiento lo cual para un ingeniero es de
suma importancia por el simple hecho de que un ingeniero al construir o crear una
estructura esta debe estar apta para soportar la aplicación de alguna fuerza. Por ello es
importante para que el ingeniero pueda equilibrar todas las fuerzas que puedan aplicarse
a dicha estructura, sean estas para las cuales fue diseñada o fuerzas que puedan ser
causadas de forma no planeada y natural.
por lo que aprendemos a calcular fuerza resultantes o al inverso componentes de las
mismas porque para poder crear algo debemos saber que tanto nos va a resistir y asi
poder asegurar el bienestar de lo creado .
al estudia los cuerpos equilibrados y en reposo no podremos entender la dinámica que
es el estudio de los cuerpos en movimiento.
EQUILOBRIO ESTATICO Página 36
Bibliografía
http://html.rincondelvago.com/equilibrio-estatico-en-tres-dimensiones.html
http://www.slideshare.net/DJRCH/equilibrio-estatico-3811851
http://www.esacademic.com/dic.nsf/es_mediclopedia/35135/equilibrio
http://www.todoexpertos.com/categorias/ciencias-e-ingenieria/fisica/respuestas/
616441/equilibrio-estatico
http://www.monografias.com/trabajos14/equilibriocuerp/equilibriocuerp.shtml
http://www.monografias.com/trabajos62/equilibrio-cuerpo-rigido/equilibrio-cuerpo-
rigido.shtml
http://ebookbrowse.com/equilibrio-estatico-problemas-resueltos-pdf-d145901484
http://www.buenastareas.com/materias/equilibrio-estatico-3d/0
http://html.rincondelvago.com/equilibrio-estatico-en-tres-dimensiones.html
http://es.wikipedia.org/wiki/Equilibrio_mec%C3%A1nico
Libro de estatica de Roussel C. Hibbeler
http://www.ejemplode.com/37-fisica/513-
ejemplo_de_equilibrio_rotacional_y_traslacional.html
EQUILOBRIO ESTATICO Página 37