Estado de Arte Robot Paralelo
10
Revisión Histórica de los Manipuladores Paralelos Desde hace ya varios siglos se han venido estudiando con mucho interés figuras geométricas como el poliedro pero fue solo hasta el siglo XIX cuando se tuvieron los primeros registros de la inclusión de figuras como estas en el estudio de la robótica. En el año 1813, el francés Agustín Louis Cauchy estuvo estudiando la rigidez del octaedro articulado. Años después, en 1931 James E. Gwinnett inventó una plataforma de simulación de vuelo para entretenimiento en un teatro que buscaba mejorar las experiencias del espectáculo que nunca llego a fabricarse pero a la cual se le reconoció como primer diseño de robótica paralela (figura 1). Figura 1. Plataforma de movimiento espacial patentada por J.E. Gwinnett Entre 1938 y 1940, se construyó el primer robot con estructura paralela de 5 grados de libertad para aplicación de pintura con espray, este fue atribuido a Willard L.V. Pollard. (Figura 2)
-
Upload
william-sanchez-lldm -
Category
Documents
-
view
184 -
download
1
Transcript of Estado de Arte Robot Paralelo

Revisión Histórica de los Manipuladores Paralelos
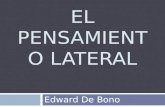
Desde hace ya varios siglos se han venido estudiando con mucho interés figuras geométricas como el poliedro pero fue solo hasta el siglo XIX cuando se tuvieron los primeros registros de la inclusión de figuras como estas en el estudio de la robótica. En el año 1813, el francés Agustín Louis Cauchy estuvo estudiando la rigidez del octaedro articulado. Años después, en 1931 James E. Gwinnett inventó una plataforma de simulación de vuelo para entretenimiento en un teatro que buscaba mejorar las experiencias del espectáculo que nunca llego a fabricarse pero a la cual se le reconoció como primer diseño de robótica paralela (figura 1).
Figura 1. Plataforma de movimiento espacial patentada por J.E. Gwinnett
Entre 1938 y 1940, se construyó el primer robot con estructura paralela de 5 grados de libertad para aplicación de pintura con espray, este fue atribuido a Willard L.V. Pollard. (Figura 2)
Figura 2. Primer robot industrial paralelo, patentado en 1942

Siete años más tarde, en 1947, fue inventado el “hexápodo octaédrico de barras de longitud variable” por el doctor Eric Gough que revolucionaria en ese entonces la robótica de aplicaciones industriales. Este robot fue fabricado para la empresa Dunlop como plataforma para analizar el comportamiento de neumáticos en el aterrizaje de aviones. (Figura 3).
Figura 3. Primer hexápodo octaédrico de Gough
En 1965, D. Stewart diseño un mecanismo paralelo para simuladores de vuelo el cual fue llamado “Plataforma de Stewart o mecanismo paralelo de Stewart (SPM)” (Figura 4). Este mecanismo consta de 6 grados de libertad y una plataforma triangular móvil que es capaz de alcanzar diferentes posiciones y orientaciones. Este mecanismo desarrollado por Stewart en numerosas ocasiones es confundido con el hexápodo octaédrico de Gough aunque sus diseños son diferentes.
Figura 4. Plataforma de Stewart

Por otro lado, en 1967 basándose en el hexápodo octaédrico de Gough, el ingeniero americano Klaus Cappel desarrollo un simulador de movimiento (figura 5).
Figura 5. Simulador de vuelo de K.L. Cappel.
K.H. Hunt en 1978 planteo la idea de utilizar lo mecanismos de los simuladores de vuelo como manipuladores y fue en 1979 cuando gracias a McCallion y Pham se utilizó un dispositivo paralelo dentro de una línea de ensamblaje por primera vez.
Nuevamente en 1983, Hunt estudió la estructura cinemática de los brazos de los robots paralelos. “En 1984, Yang y Lee desarrollaron un diseño para la plataforma de Stewart, en donde trataron de analizar el espacio de trabajo de la plataforma, mostrando que el espacio de trabajo y la maniobrabilidad de un manipulador paralelo es limitada, en comparación con el manipulador en serie” (Mantilla & Medina Papagayo, 2012).
En el siglo XX, hacia el año 1990 Reymond Clavel diseñó un manipulador DELTA, un manipulador de cuatro grados de libertad paralelepípedo. Para el año 1994, “se presentó por primera vez prototipos de Maquinas Herramienta basadas en el principio de cinemática paralela. Con ello, se logra una máquina-herramienta capaz de alcanzar un punto en su volumen de trabajo con un número mayor de posibles orientaciones, aumentando así la dexteridad de la misma” (Anteproyecto de Tesis: Diseño deesquemas de control difuso para la posición y velocidad en un Manipulador Paralelotipo DELTA, 2004).
Merlet hizo un gran avance en el estudio de robótica paralela en 1993 planteando dos métodos para resolver la cinemática de la plataforma de Stewart, por medio del Jacobiano y determinando el espacio de trabajo del robot y en 1996 presentó un método de diseño para mejorar el desempeño de la plataforma paralela de Gough en su espacio de trabajo. En 2003, empezó a investigar sobre robots paralelos modulares, que son capaces de adaptar su geometría según la tarea que tengan que realizar.

Es así como se ha avanzado en la investigación de robots paralelos, los cuales hoy en día se definen de la siguiente manera: “Un robot paralelo es un mecanismo de lazo cerrado en el cual una plataforma móvil está conectada a una base por al menos dos series de cadenas cinemáticas (piernas)”. Por otro lado, “Un robot paralelo está compuesto de un cuerpo rígido con “n” grados de libertad, y de una base fija, eslabonados juntos por lo menos por dos cadenas cinemáticas independientes. El movimiento tiene lugar a través de “n” actuadores simples” (Arturo, Jacobo Peña ,Jiménez López , Quintero Esquer , López Cota , & Castro Bojórquez , 2011).
En la actualidad, se están realizando estudios constantes con el fin de mejorar los diseños en cuanto a movilidad, espacio de trabajo y algunos otros parámetros que permitan ampliar el campo de aplicación de este tipo de robótica.
Aplicaciones
En los últimos años la robótica paralela ha sido usada en simuladores de movimiento, especialmente simuladores de vuelo; dispositivos médicos, procesos quirúrgicos como neurocirugías; sensor de fuerza-torque; interacción con los computadores que permite sentir la textura de diversos objetos en ambientes virtuales; en aplicaciones de selección, así como en tareas de la industria que tienen que ver con desplazamiento de piezas; en el área de la pedagogía con implementaciones en robots didácticos. En Colombia se han desarrollado robots Delta con fines académicos, máquina CNC con arquitectura paralela de 3 grados de libertad, plataformas de Stewart para reducir espacios de trabajo y entornos virtuales para interactuar con una plataforma de robot paralelo, optimización dimensional de un robot paralelo tipo delta con bajo consumo de energía, entre otros.
Trabajos Actuales sobre robótica paralela en Colombia y el mundo
Cinemática y Simulación de una Plataforma Robótica Paralela 3-RPS. Investigación realizada en el departamento de Ingeniería Mecánica de la Universidad Central de Bogotá - Colombia. Plataforma robótica de 3 grados de libertad diseñada como parte del proyecto Plataforma de Realidad Aumentada desarrollado en la Universidad Central.
Simulación Dinámica de Robot Paralelo Flexible. Autores: Chunxia Zhu, Lida Zhu, Yongxia Liu and Guangqi Cai de la Escuela de Ingeniería Mecánica y Automatización de la Universidad de Northeastern de Shenyang-China en el 2007. Se consideraron las varillas delgadas del robot paralelo como cuerpos flexibles para resolver la dinámica del robot paralelo con mayor precisión.
Máquina CNC experimental con arquitectura paralela de 3 grados de libertad. Autores: García Barbosa J.A., Cordoba Nieto E Departamento de Ingeniería Mecánica y Mecatrónica. En el año 2007 en la Universidad Nacional de Colombia.

Metodología para el diseño de un robot paralelo industrial tipo delta. Cuyo autor es Jhonattan Didier Rueda Flórez de la universidad pontificia bolivariana de Bucaramanga en el año 2008, fueron implementados modelos de simulación desarrollados en Solid Edge, Ansys y Adams.
Una alta velocidad translacional de un nuevo Robot paralelo de 2 grados de libertad para operaciones de recoger y colocar desarrollado por Binbin Peng, Zengming Li, Liangbin Zeng, Yu Sun de la escuela de ingeniería mecánica de la Universidad Nanjing de Ciencia y Tecnología de China en el año 2010.
Análisis de la Influencia del mecanismo paralelogramo en el error de postura de la plataforma móvil en el robot paralelo. Autores: Jianye Guo, Jingkui Li, del Istituto Shenyang de ingeniería aeronáutica de Shenyang, Liaoning en China y Jiashun Shi, Yanli Zhang de la Universidad Northeastern de Shenyang, Liaoning, China en el año 2010. Ellos analizaron como punto principal el error de posición de plataforma móvil influenciado por el mecanismo de paralelogramo de robot paralelo.
Modelación y Simulación de un Robot Paralelo de 5 Barras y 6 GDL usando Matrices Homogéneas. Autores: Urbalejo Contreras Arturo y Jacobo Peña Javier del Centro de Investigación y Aplicación en Automatización y Mecatrónica de la Universidad Tecnológica del Sur de Sonora, Obregón Sonora, México; Cuenca Jiménez Francisco de la Universidad Autónoma de México; Jiménez López Eusebio de la Universidad Tecnológica del Sur de Sonora-IIMM- Parque Tecnológico Sonora SOFT; Castro Bojórquez Julio Cesar de la Universidad Tecnológica de Tijuana- México; y Velarde Anaya Omar de la Universidad Tecnológica de Nogales, Nogales Sonora, México en el año 2010. Presentan la modelación y la simulación de un robot paralelo espacial de 6 GDL.
Diseño y análisis de un robot paralelo 6-DOF utiliza en cirugía de reemplazo de disco cervical artificial. Realizado por: Heqiang Tian, Dongmei Wu, Zhijiang Du and Lining Sun del Instituto Harbin de Tecnología en Harbin, Heilongjiang Province, China en 2010.
Modelación y Simulación de un Robot Paralelo Plano usando Quaterniones y Labview. Autores: Jiménez López Eusebio, Vázquez Cuevas Ignacio, Reyes Ávila Luis, Chávez Mendiola Eduardo, Rivera Nieblas Jorge, López Figueroa Francisco, Delfín Vázquez Juan y Urbalejo Contreras Arturo. Año 2011 en el Instituto Tecnológico Superior de Puerto Vallarta en Puerto Vallarta, Jalisco.
Optimización dimensional de un robot paralelo tipo delta basado en el menor consumo de energía. Realizado por: César Augusto Peña Cortés-Universidad de Pamplona, Edison Martínez Oviedo-Universidad de Pamplona, Pedro Fabián Cárdenas Herrera- Universidad Politécnica de Madrid. Año 2011 en Bogotá.
Diseño e implementación de un controlador de posición para una plataforma de Stewart con acomodación activa. Autor: Jesús J. Villarroel Graterol en el 2011.

Robot Paralelo para la Rehabilitación de Tobillo. Presentada por: Jhonatan Isidro Godoy Departamento de Mecatrónica en Cuernavaca, Morelos, México 2012.
Diseño e implementación de una plataforma robótica tipo delta. Autores: Lucas Mateo Urrea Mantilla, Sergio Alejandro Medina Papagayo. Universidad militar nueva granada, Bogotá, d.c. 2012. Buscan solucionar los problemas de espacio de trabajo reducido y optimizar las dimensiones de los eslabones para maximizar el espacio de trabajo y la destreza. desarrollaron los modelos cinemáticos directo e inverso e implementaron una interfaz gráfica de usuario para controlar los movimientos del robot desde un computador.
Avances en el desarrollo de una plataforma de control mental de un robot paralelo tipo delta. Autores: Rubiano j f, Peña C A, Martínez E de la Universidad de Pamplona, Pamplona –Colombia 2012.
Control de modo deslizante de robot paralelo mediante la optimización de conmutación de ganancia sobre la base de RBF red neuronal. Autores: GAO Guoqin, DING Qinqin, WANG Wei de la Escuela de Ingeniería Electrica e informática de la Universidad de Jiangsu, Zhenjiang en el año 2012.
Manipulador móvil: estudio sobre la coordinación de movimientos de un manipulador serial acoplado. Tesis desarrollada por Pedro Mariano Escobedo Castillo en Agosto 2012. Se presenta el estudio sobre coordinación de movimientos de un manipulador móvil y la selección del tipo de manipulador móvil a emplear para recoger un objeto y colocarlo en otro lugar.
Calibración cinemática de 6-UPS de un Robot Paralelo quirúrgico. Realizado por: Weidong Wang, Litao Zhang, Junlin Ma del Instituto Harbin de tecnología de China en el 2013.
BIBLIOGRAFIA
(2004). Anteproyecto de Tesis: Diseño de esquemas de control difuso para la posición y velocidad en un Manipulador Paralelo tipo DELTA.
ARACIL, R., SALTARÉN, R., SABATER , J., & REINOSO, O. (2006). Robots paralelos: máquinas con un pasado para una robótica del futuro. revista Iberoamericana de Automatica e Informatica Industrial.
ARTURO, U. C., JACOBO PEÑA , J., JIMÉNEZ LÓPEZ , E., QUINTERO ESQUER , J., LÓPEZ COTA , J., & CASTRO BOJÓRQUEZ , J. (3,4 de Noviembre de 2011). Simulación, control y construcción de robot paralelo de 5 barras y 6 gdl para propósito didácticos. Puerto Vallarta, Jalisco, Mexico.

DIEGO , O. (s.f.). Cinemática y Simulación de una Plataforma Robótica Paralela 3-RPS.
FLOREZ, J. D. (2008). Metodologia para el diseño de un robot paralelo industrial tipo delta . Bucaramanga, Colombia.
J.C. RESÉNDIZ B., A. J.-R. (23-25 de Octubre de 2007). Aplicación y desarrollo trigonométrico de las ecuaciones del movimiento de un robot paralelo plano de tres grados de libertad. Cusco, Perú.
MANTILLA, L. M., & MEDINA PAPAGAYO, (2012). Diseño e implementación de una plataforma robótica tipo delta. Bogotá-Colombia.
RUBIANO J F, P. C. (23-25 de Octubre de 2012). Avances en el desarrollo de una plataforma de control mental de un robot paralelo tipo delta. Cusco, Perú.
VÁZQUEZ GONZALEZ, J., CISNEROS LIMÓN, R., MENDOZA VÁZQUEZ, R., & ALEJOS PALOMARES, R. (2007). Análisis cinemático y simulación de un robot paralelo de estructura 6-RSS. Red de Revistas Científicas de América Latina, el Caribe, España y Portugal.
VIVAS, A. (s.f.). Robótica paralela: aplicaciones industriales, modelado y control. Popayán, Colombia.
ZABALZA, I., & ROS, J. (23-25 de Octubre de 2007). Aplicaciones actuales de los robots paralelos. Pamplona, Navarra, España.