Final
14
-1- Balotario Final – CONTROL I 1º Mencione cuáles son los parámetros en el dominio del tiempo y muestre gráfica y detalladamente la respuesta de un sistema de primer orden ante un escalón unitario, una rampa y un impulso PARÁMETROS EN EL DOMINIO DEL TIEMPO: 1. Tiempo de retardo, 2. Tiempo de levantamiento, 3. Tiempo pico, 4. Sobrepaso máximo, 5. Tiempo de asentamiento, RESPUESTA UN SISTEMA DE PRIMER ORDEN ANTE UN ESCALÓN UNITARIO: Sea el sistema de primer orden (exponente unitario): 1 1 ) ( ) ( Ts s R s C (a) Como la transformada de Laplace de la función escalón unitario es: s 1 Sustituyendo s s R 1 ) ( en la ecuación (a) se obtiene s Ts s C 1 1 1 ) ( Si se desarrolla C(s) en fracciones simples se obtiene ) 1 ( 1 1 1 1 1 ) ( T s s Ts s s C (b)
-
Upload
alesander-abanto -
Category
Documents
-
view
224 -
download
1
description
a
Transcript of Final

-1-
Balotario Final – CONTROL I
1º Mencione cuáles son los parámetros en el dominio del tiempo y muestre gráfica y detalladamente la respuesta deun sistema de primer orden ante un escalón unitario, una rampa y un impulso
PARÁMETROS EN EL DOMINIO DEL TIEMPO:
1. Tiempo de retardo,2. Tiempo de levantamiento,3. Tiempo pico,4. Sobrepaso máximo,5. Tiempo de asentamiento,
RESPUESTA UN SISTEMA DE PRIMER ORDEN ANTE UN ESCALÓN UNITARIO:
Sea el sistema de primer orden (exponente unitario):
1
1
)(
)(
TssR
sC(a)
Como la transformada de Laplace de la función escalón unitario es:s
1
Sustituyendos
sR1
)( en la ecuación (a) se obtiene
sTssC
1
1
1)(
Si se desarrolla C(s) en fracciones simples se obtiene
)1(
11
1
11)(
TssTsssC
(b)

-2-
Si se toma la transformada inversa de Laplace de la Ecuación (b), se obtiene:
,1)( Ttetc para 0t
Analizando esta respuesta, se puede observar que en el instante 0 la respuesta es nula, y va aproximándose hastallagar a tomar el valor de la señal de referencia (la unidad).
RESPUESTA UN SISTEMA DE PRIMER ORDEN ANTE UNA RAMPA:
Como la transformada de Laplace de la función rampa unitaria es: 1/s2. Se obtiene el sistema:
2
1
1
1)(
sTssC
Desarrollando C(s) en fracciones simples se obtiene
1
1)(
2
2
Ts
T
s
T
ssC (a)
Tomando la transformada inversa de Laplace de la Ecuación (a), se obtieneTtTeTttc )( , para 0t
De este modo, la señal de error e(t) es
)()()( tctrte
)1( TteT

-3-
Conforme t tiende a infinito, e.t/T se aproxima a cero y, por tanto, la señal de error e(t) se aproxima
a T0.
RESPUESTA UN SISTEMA DE PRIMER ORDEN ANTE UN IMPULSO:
Para la entrada impulso unitario, R(s)=1 y la salida del sistema, pueden obtenerse como:
11
)(
Ts
sC (a)
La transformada inversa de Laplace de la Ecuación (a) produce:
TteT
tc 1
)(, para 0t (b)
La curva de respuesta obtenida mediante la Ecuación (b) aparece en la siguiente imagen.

-4-
2º Muestre la forma estandarizada de un sistema de segundo orden, la clasificación de la respuesta del sistema enfunción del factor de amortiguamiento ante un escalón unitario y la forma de sus respuestas respectivamente:
Forma estándar de un sistema de segundo orden:
22
2
2)(
)(
nn
n
sssR
sC
Se analizará la respuesta transitoria ante una entrada escalón unitario:
(1) Caso subamortiguado )10( : en este caso )()( sRsC se escribe:
))(()()( 2
dndn
n
jsjssR
sC
donde 21 nd se denomina frecuencia natural amortiguada. Si )(sR es una entrada escalón, entonces
ssssC
nn
n
)2()( 22
2
Utilizando fracciones parciales
2222 )()(1
)(dn
n
dn
n
ss
s
ssC

-5-
y conociendo que
tes
sd
t
dn
n n
cos)( 22
1-L
tsenes d
t
dn
d n
22)(
1-L
Se obtiene la salida en el tiempo
)0(1
tan1
1)(2
1
2
ttsene
tc d
tn
(2) Caso de amortiguamiento crítico )1(
En este caso se tienen dos polos reales iguales y )(sC ante un escalón es
sssC
n
n2
2
)()(
la transformada inversa arroja
)0()1(1)( ttetc ntn
(3) Caso sobreamortiguado )1(
En este caso se tienen dos polos reales negativos y diferentes. Para una entrada escalón, )(sC es
ssssC
nnnn
n
)1)(1()(
22
2
La transformada inversa de Laplace de la ecuación anterior es
tnetc
)1(
22
2
)1(12
11)(

-6-
Respuesta al escalón de diferentes sistemas de segundo orden.
3º Muestre la manera como se obtiene la función de transferencia de la planta mostrada compuesta por un resorte,una masa y un amortiguador conectados en serie:
PLANTA LEYENDA
u(t) = señal de entrada
k = constante del resorte
m = masa
b = constante de viscosidad
y(t) = señal de salida

-7-
Solución:
La función de transferencia será.( ) = ( ) ( ) + ( ) (a)
( ) = ( ) (b)
( ) = ( ) (c)( ) = ( ) ( ) + ( ) (d)
Siendo la ecuación (d) la ecuación diferencial en el dominio del tiempo que representa el comportamientodel sistema.
Trasformando la ecuación (d) del dominio del tiempo al de Laplace obtenemos la ecuación (f)= ( ), = ( )= ( + + )En la ecuación (f) se consideran condiciones iniciales nulas.
Trabajando la ecuación (f) podemos obtener la función de transferencia en el dominio de Laplace:
= = + +4º Muestre la manera como se obtiene la función de transferencia de un motor cd controlado por campo:
PLANTA
LEYENDAIf (t) = corriente de campo

-8-
Ia = corriente de armadura constante(t) = parRf = resistencia de campoRa = resistencia de armaduraLf = inductancia de campo = coeficiente de amortiguamiento viscosoJ = momento de inercia del motor y la cargaK = constante de par
La síntesis de la solución se muestra en términos de la función de transferencia del sistema mostrada en el lenguajede bloques de la siguiente manera:

-9-
5º Muestre la manera como se obtiene la función de transferencia del siguiente sistema de suspensión:
PLANTA LEYENDA
u(t) = señal de entrada
m1 = masa 1m2 = masa 2
x(t) = desplazamiento de la masa m1y(t) = desplazamiento de la masa m2
k1= resortek2 = resorte
b = Coeficiente de amortiguación
y(t) = señal de salida
Solución:
Aplicando la segunda ley de Newton al sistema, obtenemos: = ( − ) + ( − ) + ( − ) = − ( − ) − ( − )Por tanto, tenemos que + + ( + ) = + +
+ + = +Tomando la transformada de Laplace de estas dos ecuaciones y suponiendo condiciones inicialesde cero, obtenemos[ + + ( + )] ( ) = ( + ) ( ) + ( )[ + + ] ( ) = ( + ) ( )Eliminando X(S) de las dos últimas ecuaciones, tenemos( + + + ) + ++ ( ) = ( + ) ( ) + ( )

-10-
lo cual produce( )( ) = ( + )1 + 2 4 + ( 1 + 2) 3 + [ 1 2 + ( 1 + 2) ] 2 + 1 + 1 26º Muestre la manera como se obtiene la función de transferencia del siguiente circuito eléctrico:
PLANTA
LEYENDAR1 = Resistencia ()R2 = Resistencia ()C1 = Condensador (F)C2= Condensador (F)ei = Tensión de entrada (V)eo = Tensión de salida (V)i1 = corriente (A)i2 = corriente (A)
Solución:
Ecuaciones para los circuitos
1. ∫( − ) + =Aplicando La transformada de Laplace con condiciones iniciales de cero:[ ( ) − ( )] + ( ) = ( ) (a)
2. ∫( − ) + + ∫ = 0

-11-
Aplicando La transformada de Laplace
[ ( ) − ( )] + ( ) ( ) = 0 (b)
3. ∫ =Aplicando La transformada de Laplace1 [ ( )] = ( )Eliminando (s) de las ecuaciones a y b y escribiendo ( ) en términos de ( ), encontramos que lafunción de transferencia entre ( ) ( ) es:
( )( ) = 1( + 1)( + 1) += 1+ ( + + ) + 1
7º ¿Qué forma tiene el diagrama de Bode del circuito anterior?
8º ¿Qué es el margen de fase y el margen de ganancia?
MARGEN DE FASE: el margen de fase es la cantidad de retardo de fase adicional en la frecuencia de crucede ganancia requerida para llevar el sistema al borde de la inestabilidad. La frecuencia de cruce de ganancia es lafrecuencia en la cual la magnitud de la función de transferencia en lazo abierto es unitaria.
MARGEN DE GANANCIA: el margen de ganancia es el recíproco de la magnitud g(jw) en la frecuencia a la cual elángulo de fase es -180grados.
En términos de decibelios:
Kg dB= 20log Kg = -20log |G(jw1)|
El margen de ganancia expresado en decibelios es positivo si Kg es mayor que la unidad y negativo si Kg es menor quela unidad. Por tanto, un margen de ganancia positivo significa que el sistema es estable, y un margen de ganancianegativo, quiere decir que es sistema es inestable.

-12-
9º Explique el criterio de Routh
El teorema de Routh – Hürwitz sirve para analizar la estabilidad de los sistemas dinámicos. Básicamente, elteorema proporciona un criterio capaz de determinar en cuál semiplano (izquierdo o derecho) del planocomplejo están localizadas las raíces del denominador de la función de transferencia de un sistema; y enconsecuencia, conocer si dicho sistema es estable o no. Si tras aplicar el criterio nos da como resultado quetodos los polos están en el semiplano izquierdo, el sistema es estable, y si hay un mínimo de un polo en elsemiplano derecho, el sistema es inestable.
El criterio se refiere a la función de transferencia en lazo cerrado del sistema. Para aplicar el criterio a unsistema descrito por su función de transferencia en lazo abierto, hay que incluir la realimentación haciendo:
)(1
)()(
sG
sGsGBC
10º En que consiste el criterio de Nyquist
El criterio de estabilidad de Nyquist permite averiguar la estabilidad relativa y absoluta de los sistemaslineales en lazo cerrado a partir del conocimiento de sus características de frecuencia en lazo abierto. Unaventaja del método de la respuesta en frecuencia es que las pruebas de la respuesta en frecuencia son, engeneral, sencillas y pueden ser muy precisas con el uso de generadores de señales sinusoidales y un equipode medición preciso.
El teorema trata del muestreo, que no debe ser confundido o asociado con la cuantificación, proceso quesigue al de muestreo en la digitalización de una señal y que, al contrario del muestreo, no es reversible (seproduce una pérdida de información en el proceso de cuantificación, incluso en el caso ideal teórico, que setraduce en una distorsión conocida como error o ruido de cuantificación y que establece un límite teóricosuperior a la relación señal-ruido). Dicho de otro modo, desde el punto de vista del teorema, las muestrasdiscretas de una señal son valores exactos que aún no han sufrido redondeo o truncamiento alguno sobreuna precisión determinada, es decir, aún no han sido cuantificadas.
11º Explique el método de Ziegler (los dos casos) usados para sintonizar un controlador PID.
Ziegler y Nichols propusieron reglas para determinar los valores de la ganancia proporcional Kp, del tiempointegral Ti y del tiempo derivativo Td, basándose en las características de respuesta transitoria de unaplanta dada. Tal determinación de los parámetros de los controladores PID o sintonía de controladores PIDla pueden realizar los ingenieros mediante experimentos sobre la planta. (Después de la propuesta inicial deZiegler-Nichols han aparecido numerosas reglas de sintonía de controladores PID. Estas reglas estándisponibles tanto en publicaciones técnicas como de los fabricantes de estos controladores.)
Hay dos métodos denominados reglas de sintonía de Ziegler-Nichols: el primero y el segundométodo. A continuación se hace una breve presentación de estos dos métodos.

-13-
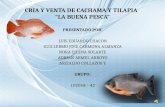
Primer método. En el primer método, la respuesta de la planta a una entrada escalón unitario se obtiene demanera experimental. Si la planta no contiene integradores ni polos dominantes complejos conjugados, lacurva de respuesta escalón unitario puede tener forma de S, como se observa en la siguiente imagen. Estemétodo se puede aplicar si la respuesta muestra una curva con forma de S. Tales curvas de respuestaescalón se pueden generar experimentalmente o a partir de una simulación dinámica de la planta. La curvacon forma de S se caracteriza por dos parámetros: el tiempo de retardo L y la constante de tiempo T.El tiempo de retardo y la constante de tiempo se determinan dibujando una recta tangente en el punto deinflexión de la curva con forma de S y determinando las intersecciones de esta tangente con el eje deltiempo y con la línea c(t)=K, tal como se muestra:

-14-
Segundo método. En el segundo método, primero se fija Ti=∞ y Td=0. Usando sólo la acción de controlproporcional se incrementa Kp desde 0 hasta un valor crítico Kcr, en donde la salida presente oscilacionessostenidas. (Si la salida no presenta oscilaciones sostenidas para cualquier valor que pueda tomar Kp,entonces este método no se puede aplicar.) Así, la ganancia crítica Kcr y el periodo Pcr correspondiente sedeterminan experimentalmente.