
FÍSICA
46
Unidad I “Antecedentes Históricos” Antiguamente se designaba a la Física con el nombre de Filosofía Natural. Esto significa que su objeto era no sólo describir la Naturaleza sino además explicarla. Cuando queremos “explicar” algo, debemos demostrar su dependencia respecto a otras verdades anteriormente aceptadas como tales. Estas “verdades” fundamentales se llaman leyes y se expresan, usualmente en lenguaje matemático. La naturaleza es demasiado complicada para ser descrita en la forma exacta antes citada, pero ciertos de sus aspectos, lo mismo que las máquinas construidas por el hombre son lo suficientemente sencillos para poder ser explicados matemáticamente, en forma de leyes fundamentales. Estos aspectos son el campo legítimo de la Física y se agrupan por conveniencia en cinco partes fundamentales que en el próximo mapa conceptual se detalla. En resumen, la Física puede definirse como la ciencia que estudia la materia y la energía y sus relaciones entre sí. Cinemática .- Estudia el movimiento de los cuerpos sin importar las causas que lo producen. Mecánica Dinámica.- Estudia las causas que producen el movimiento de los cuerpos. (Rama de la Física que estudia Estática.- Estudia los cuerpos en reposo. el movimiento de los cuerpos) Acústica Física clásica Óptica Termología Electricidad y Magnetismo * Algunos conceptos básicos: Magnitud.- Es todo aquello que puede medirse y cuantificarse.
-
Upload
carolinnamc -
Category
Documents
-
view
16 -
download
0
description
Unidad I
Transcript of FÍSICA

Unidad I “Antecedentes Históricos”
Antiguamente se designaba a la Física con el nombre de Filosofía Natural. Esto significa que su objeto era no sólo describir la Naturaleza sino además explicarla. Cuando queremos “explicar” algo, debemos demostrar su dependencia respecto a otras verdades anteriormente aceptadas como tales. Estas “verdades” fundamentales se llaman leyes y se expresan, usualmente en lenguaje matemático.
La naturaleza es demasiado complicada para ser descrita en la forma exacta antes citada, pero ciertos de sus aspectos, lo mismo que las máquinas construidas por el hombre son lo suficientemente sencillos para poder ser explicados matemáticamente, en forma de leyes fundamentales. Estos aspectos son el campo legítimo de la Física y se agrupan por conveniencia en cinco partes fundamentales que en el próximo mapa conceptual se detalla.
En resumen, la Física puede definirse como la ciencia que estudia la materia y la energía y sus relaciones entre sí.
Cinemática .- Estudia el movimiento de los cuerpos sin importar las causas que lo producen.
Mecánica Dinámica.- Estudia las causas que producen el movimiento de los cuerpos. (Rama de la Física que estudia Estática.- Estudia los cuerpos en reposo. el movimiento de los cuerpos)
Acústica
Física clásica Óptica
Termología
Electricidad y Magnetismo
* Algunos conceptos básicos:
Magnitud.- Es todo aquello que puede medirse y cuantificarse.Magnitudes fundamentales.- Son aquellas que se definen por sí solas como la longitud, la masa , el
tiempo y la temperatura entre otras.Magnitudes derivadas.- Resultan de la combinación de las magnitudes fundamentales: área,
volumen, velocidad, fuerza, etc. Cantidades escalares.- Son aquellas que para definirse precisan solo de un número y unidad. Por ejemplo una longitud de 10 m, una temperatura de 70 ºC, una masa de 80 kg.
Cantidades vectoriales.- Son aquellas que aparte de un número y unidad tienen dirección y sentido. Por ejemplo un desplazamiento de 15 m al Norte, una fuerza de 70 N 30º, una velocidad de 2 m/s al NE, etc.

PREFIJOS Y NOTACIÓN CIENTÍFICA
Prefijo Símbolo Valor Notacióntera T 1000000000000 1012
giga G 1000000000 109
mega M 1000000 106
kilo k 1000 103
hecto h 100 102
deca da 10 101
1 100
deci d 0.1 10-1
centi c 0.01 10-2
mili m 0.001 10-3
micro 0.000001 10-6
nano n 0.000000001 10-9
pico p 0.000000000001 10-12
femto f 0.000000000000001 10-15
ato a 0.000000000000000001 10-18
UNIDADES BÁSICAS DEL SISTEMA INTERNACIONAL DE UNIDADES
ALGUNAS EQUIVALENCIAS DEL SISTEMA INGLÉS Y DEL S.I.
1 mi = 1609 m 1 in = 2.54 cm 1 yd = 0.914 m1 gal = 3.785 l 1 ft = 0.3048 m 1 lb = 0.454 kg
Vector.- Flecha que representa una magnitud vectorial.
PARTES DE UN VECTOR
(1) o (2) (3)
1).- Magnitud.- Está dada por el tamaño de la flecha.2).- Dirección.- Está dada por la línea del vector.3).- Sentido.- Lo representa la punta de la flecha.
Cantidad Nombre SímboloLongitud metro m
Masa kilogramo kgTiempo segundo s
Temperatura Kelvin kCorriente eléctrica Ampere A
Nº de partículas mol molIntensidad luminosa candela cd

Fuerza.- Acción capaz de modificar el estado de reposo o de movimiento de un cuerpo o de deformarlo.
UNIDADES DE FUERZAKilogramo fuerza (kgf).- Es la fuerza necesaria para sostener la masa de 1 kg en contra de la
gravedad.Newton (N).- Fuerza capaz de producirle una aceleración de 1 m/s2 a una masa de 1 kg.Dina.- Fuerza capaz de producirle una aceleración de 1 cm/s2 a una masa de 1 g.
1 kgf = 9.8 N 1 N = 105 dinas 1 lb = 4.448 N
Fricción.- Fuerza que se opone al movimiento de dos superficies en contacto.
LAS TRES LEYES DE NEWTON
1ª Ley de Newton.- Todo cuerpo en estado de reposo o de movimiento rectilíneo uniforme permanecerá en dicho estado a menos que se le aplique una fuerza externa.
2ª Ley de Newton.- Al aplicar una fuerza a un cuerpo, la aceleración producida es directamente proporcional a la fuerza aplicada e inversamente proporcional a la masa del mismo.
a = F/m F = ma
3ª Ley de Newton.- A toda fuerza de acción corresponde otra de reacción igual y de sentido contrario.

Unidad II “Estática de la partícula”
FUERZAS EN UN PLANO. FUERZAS SOBRE UNA PARTÍCULA.
Una fuerza representa la acción de un cuerpo sobre otro y, generalmente, está caracterizada por su punto de aplicación, su magnitud y su dirección.
RESULTANTE DE DOS FUERZAS
Si tenemos dos fuerzas que actúan sobre un cuerpo el efecto que éstas producen pueden sustituirse por una sola fuerza Resultante del sistema vectorial.
F1 = 1 kN F2 = 3 kN FR = 2 kN
MÉTODO DEL PARALELOGRAMO.- Se utiliza para encontrar el vector resultante de un sistema de dos vectores y consta de los siguientes pasos:
1.- Se traza un eje de coordenadas x-y.2.- Se escoge una escala adecuada, por ejemplo 1 cm = 15 N.3.- Se trazan los dos vectores sobre el origen del eje cartesiano respetando la escala.4.- Se trazan líneas paralelas a los vectores donde terminan los coplanares.5.- Se une el origen del eje de coordenadas con el cruce de las paralelas para encontrar el vector resultante aplicando la escala prevista.
Ejemplo.- Encuentre la fuerza resultante de la ilustración:
FA = 200 N FB = 150 N 45º
(1) (2) 1 cm = 100 N (3) (4) y FB
45º
x FA
(5) FB 1 cm -------- 100 N
FR 3.26 cm-------- FR FR = 326 N 20º FA
MÉTODO DEL POLÍGONO.- Se utiliza para encontrar el vector resultante de un sistema de dos o más vectores y consta de los siguientes pasos:
1.- Se traza un eje de coordenadas x-y.2.- Se escoge una escala adecuada, por ejemplo 1 cm = 15 N.3.- Se traza el primer vector sobre el origen del eje cartesiano respetando la escala.4.- Se traza el segundo vector donde termina el primer vector.5.- Se traza el tercer vector donde termina el segundo vector y así sucesivamente.

5.- Se une el origen del eje de coordenadas con la punta del último vector para encontrar el vector resultante aplicando la escala prevista.
Ejemplo.- Una persona se desplaza 20 m al Norte, luego 40 m el Este y por último 35 m al Sur, encuentre el desplazamiento resultante de la persona:
(1) N (2) 1 cm = 10 m (3) (4) d2
d1 d1
O E
d1 = 20 m N S d2 = 40 m Ed3 = 35 m SdR = ? (5)
d2 1 cm ----------- 10 m
4.3 cm---------- dR
d1
d3
dR dR = 43 m SE
DESCOMPOSICIÓN DE UNA FUERZA EN SUS COMPONENTES
Se ha visto que dos o más fuerzas que están actuando sobre una partícula pueden ser remplazadas por una sola fuerza que tiene el mismo efecto sobre dicha partícula. Por otro lado, una sola fuerza F que está actuando sobre una partícula puede ser remplazada por dos o más fuerzas que en conjunto tienen el mismo efecto que F.
Para la descomposición de una fuerza se puede hacer uso de la trigonometría y del Teorema de Pitágoras.
F Fy Fx
sen = Fy /F Fy = Fsen cos = Fx /F Fx = Fcos
F = Fx2 + Fy
2
Ejercicios:1.- Encontrar las componentes en x e y de la fuerza de la figura:
F = 200 kgf F = 200 kgf Fy sen 30º = Fy/200 kgf Fy = 200 kgf sen 30º
30º 30º
cos 30º = Fx/200 kgf Fx= 200 kgf cos 30º Fx
Fx= 173.21 kgf Fy = 100 kgf
2.- Encuentre el vector resultante del siguiente sistema:

FA = 200 N FB = 150 N 45º
150 N 45º Aplicando la 2ª Ley de Newton Fx =ma Fx = 0 Fx = 200 N + 150 N cos 45º
Fy =ma Fy = 0 Fy = 150 N sen 45º 200 N
Fx = 306.06 NFy = 106.06 N
Fr = Fx2 + Fy
2
Fr = (306.06 N)2 + (106.06 N)2 = tan-1 (106.06/306.06) Fr = 323.92 N 19.11º
3.- Un objeto se jala con dos cuerdas como se muestra en la figura. Si la fuerza resultante es de 3000 lb y es horizontal partiendo del centro del objeto. Determine:a).- La tensión en cada cuerda si = 45ºb).- El valor de para la cual la tensión T2 es mínima.
a).- T1 25º Fr = 3000 lb T1 25º
45º
T2 T2
3000 lb Aplicando el teorema del triángulo T1/sen45º =T2/sen25º = 3000 lb/sen 110º 45º 25º T1
T2 110º T1 = (3000 lb/sen110º) (sen45º) T1 = 2257.5 lbT2 = (3000 lb/sen110º) (sen25º) T2 = 1349.2 lb
b).- 3000 lb
La tensión T2 es mínima cuando T1 y T2 son perpendiculares entre sí 25º T2 90º T1
Los valores correspondientes para T1 y son:
= 90º - 25º = 65º
T1 / sen 65º = 3000 lb sen 90º T1 = (3000 lb sen90º) (sen65º)
= 65º T1 = 2718.9 lb

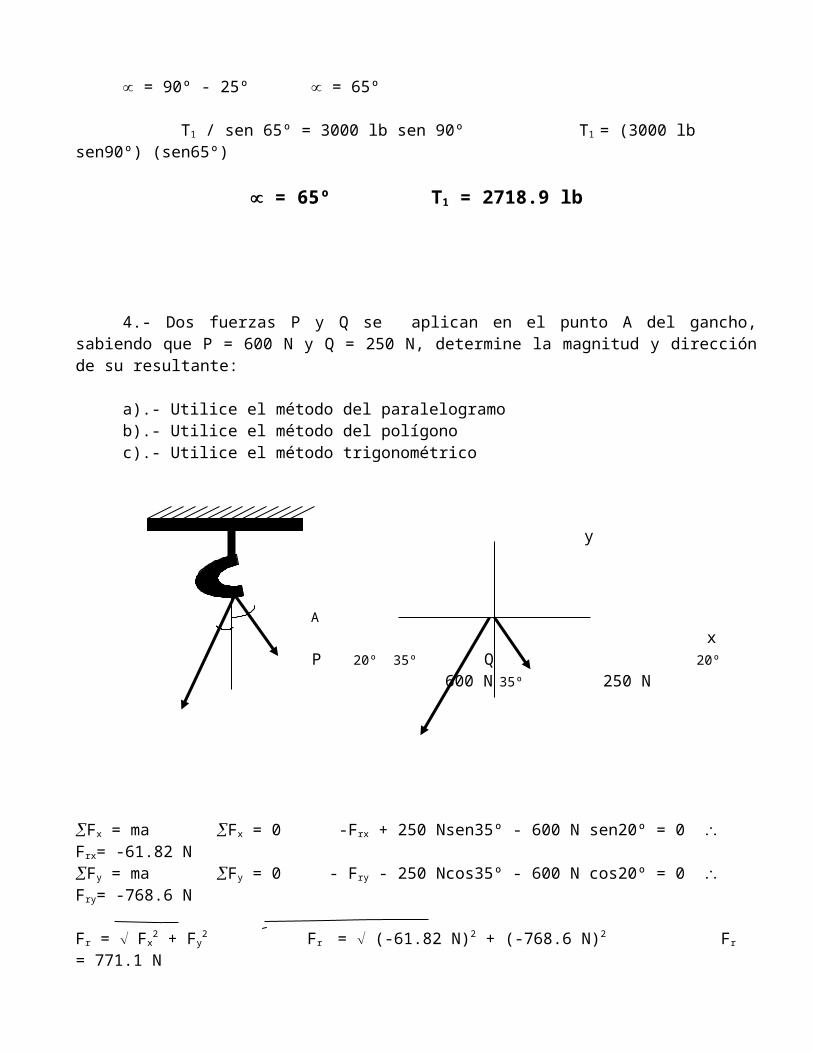
4.- Dos fuerzas P y Q se aplican en el punto A del gancho, sabiendo que P = 600 N y Q = 250 N, determine la magnitud y dirección de su resultante:
a).- Utilice el método del paralelogramob).- Utilice el método del polígonoc).- Utilice el método trigonométrico
y
A x
P 20º 35º Q 20º 600 N 35º 250 N
Fx = ma Fx = 0 -Frx + 250 Nsen35º - 600 N sen20º = 0 Frx= -61.82 NFy = ma Fy = 0 - Fry - 250 Ncos35º - 600 N cos20º = 0 Fry= -768.6 N Fr = Fx
2 + Fy2 Fr = (-61.82 N)2 + (-768.6 N)2 Fr = 771.1 N
Fr = 771.1 N 265.4º = tan-1(Fy/Fx) = tan-1(-768.6 N / -61.82N) = tan-1(12.43) = 85.40º
EQUILIBRIO DE UNA PARTÍCULA
En algunos problemas puede darse el caso de que la Resultante de un sistema de fuerzas sea cero, en tal caso se dice que la partícula está en equilibrio; por lo tanto se tiene la siguiente definición: Cuando la resultante de todas las fuerzas que actúan sobre una partícula es igual a cero, la partícula está en equilibrio.
100 lb F4=400 N
30º F1 R = F = 0 100 lb F1=300 N Fx = 0 F3=200 N 30º F2 Fy = 0 F2=173.2 N
F4 F3

Ejemplo.- Dos cables se amarran juntos en C y se cargan como se muestra en la figura. Determine la tensión en:a).- El cable AC b).- El cable BC
A 50º 500 N
C Consideraremos el punto C como una partícula en equilibrio:
30º TAC (a)Fx = 0 500 N - TACcos40º - TBCcos60º = 0 (1)
B 40º 500 N Fy = 0 TACsen40º - TBCsen60º = 0 (2) 60º
Despejando TBC de la ec. 2 TBC = 0.742 TAC
TBC Sustituyendo el valor de TBC en la ec. 1 TAC = 439.7 N
(b)sustituyendo el valor de TAC TBC = 0.742 (439.7 N) TAC = 326.25 N
FUERZAS EN EL ESPACIOCOORDENADAS RECTANGULARES DE UNA FUERZA EN EL ESPACIO
Los problemas considerados anteriormente involucraban únicamente dos dimensiones y podrían ser formulados y resueltos en un solo plano.Ahora consideraremos problemas que involucren las tres dimensiones del espacio. y Fr = Fx
2 + Fy2 + Fz
2 Fx = Frcosx Fy = Frcosy Fz = Frcosz
x z
Ejemplos:
1.- Un cable anclado en el punto A sostiene un poste. La tensión en dicho cable es de 1250 Kgf. Determine:a).- Las componentes Fx, Fy y Fz de la fuerza que actúa sobre el punto A.b).- Los ángulos x, y y z que definen la dirección de dicha fuerza.
B
40m 20 m
A15 m
a).-
dx = -20 m dy = 40 m dz = 15 m La distancia de A hasta B es: AB = dx2 + dy
2 + dz2
AB = (-20m)2 + (40m)2 + (15m)2 AB = 47.17 m F = 1250 kgf / 47.17 m -(20m)i + (40m)j + (15m)k
Fx = -530 kgf Fy = 1060 kgf Fz = 397.5 kgf
b).-cosx = Fx / Fr = -520/1250 x = 65.42º
cosy = Fy / Fr = 1060/1250 y = 32º
cosz = Fz / Fr = 397.5/1250 z = 71.5º
2.- Una torre de transmisión se sostiene por tres alambres los cuales están anclados mediante pernos en B, C, y D. La tensión en el alambre AB es 525 lb, determine las componentes de la fuerza ejercida por el alambre sobre el perno B. y A dx = -20 ft dy = 100 ft dz = -25 ft
Fr = Fx + Fy + Fz 20 ft
D 25 ft
B 20 ft 74 ft
z 60 ft C 18 ft x
dAB = (-20)2 + (100)2 + (-25)2 dAB = 105 ft
cosx = dx / dr = 20/105 x = 79.02º Fx = 525 cos 79.02º Fx = 100 lbcosy = dy / dr = 100 /105 y = 17.75º Fy = 525 cos 17.75º Fy = 500 lb cosz = dz / dr = -25/105 z = 103.77º Fx = 525 cos 103.77º Fz = -125 lb
Unidad III “Estática del cuerpo rígido”
CUERPOS RÍGIDOS: SISTEMAS EQUIVALENTES DE FUERZAS
Definiremos un cuerpo rígido como aquel que no se deforma. En la realidad no existen los cuerpos rígidos ya que al aplicarles una fuerza sufren deformaciones, pero en los casos en que son prácticamente inapreciables se considerarán que son cuerpos rígidos.
FUERZAS EXTERNAS E INTERNAS.- Las fuerzas que actúan sobre un cuerpo rígido se pueden dividir en dos grupos:1.- Fuerzas externas.- Representan la acción que ejercen otros cuerpos sobre el cuerpo rígido bajo consideración. Ellas son las responsables del comportamiento externo del cuerpo rígido. Las fuerzas externas causarán que el cuerpo se mueva o asegurarán que este permanezca en reposo.
2.- Fuerzas internas.- Son aquellas que mantienen unidas las partículas que conforman el cuerpo rígido. Si el cuerpo rígido está constituido estructuralmente por varias partes, las fuerzas que mantienen unidas a dichas partes también se definen como fuerzas internas.
PRINCIPIO DE TRANSMISIBILIDAD.- El efecto de una fuerza dada sobre un cuerpo rígido permanece inalterado si dicha fuerza se mueve a lo largo de su línea de acción.

F F´
=
MOMENTO DE UNA FUERZA
El momento de una fuerza puede definirse como el efecto de giro que produce sobre un cuerpo alrededor de un punto. Generalmente sus unidades son Nm.
MOMENTO DE UNA FUERZA CON RESPECTO A UN PUNTO.- Consideremos el cuerpo rígido de la figura y el efecto de la fuerza F que actúa sobre él. Un efecto sería la tendencia a producir un movimiento en la dirección de F. Si el cuerpo estuviese sujeto en el punto A mediante un pasador, entonces F produciría una rotación alrededor de A en el sentido contrario al de las manecillas del reloj.
y F La magnitud de este efecto rotatorio depende tanto de las mag-
R nitudes como de las direcciones de F y r. Si la línea de acción de F A pasa por el punto A, el momento con respecto a ese punto es cero
o sea, no existe efecto de giro.
x
zFy F F
Fx A i j k d Mo = F x d Mo = r x F = x y z
Fx Fy Fz
COMPONENTES RECTANGULARES DEL MOMENTO DE UNA FUERZA
Considérese por ejemplo el momento Mo con respecto a O de y una fuerza F de componentes Fx, Fy y Fz aplicada en el punto
A de coordenadas x, y, z. Observando que las componentes del vec-- Fy tor de posición r son respectivamente iguales a las coordenadas del
Punto A, escribimos Fx r = xi + yj + zk y F = Fxi + Fyj + Fzk
x Sustituyendo para r y F de las expresiones anteriores Mo = r x F

Podemos tener F
z Mo = Mxi + Myj + Mzk en donde las componentes Mx, My,y Mz están definidas por las relaciones: Mx = yFz - zFy , My = zFx – xFz , Mz = xFy – yFx
Para calcular el momento MB con respecto a un punto arbitrario b de la fuerza F aplicada en A, debemos reemplazar al vector de posición r por un vector trazado de B y A. Este vector nos da la posición relativa de A respecto a B y se representa por rA/B . Como rA/B puede obtenerse restando rB de rA, escribimos:
MB = rA/B x F = (rA – rB) x F o bien, usando la forma de un determinante:
MB = xA/B yA/B zA/BDonde xA/B, yA/B y zA/B representan las componentes del vector rA/B:
i j kxA/B yA/B zA/B
FX FY FZ xA/B = xA – xB yA/B = yA – yB zA/B = zA – zB
Ejemplo.- Un peso de 200 N se cuelga en el extremo de un palanca que está fija en el punto O. Determine:a).- El momento de la fuerza de 200 N con respecto a O.b).- La fuerza horizontal aplicable en A que origina el mismo momento respecto a O.c).- La mínima fuerza aplicada en A que origina el mismo momento respecto a O.
A0.80 m
a).- La distancia perpendicular desde O hasta la línea de acción del peso de O 50º 200 N es d = 0.80 m cos50º, d = 0.51 m. La magnitud del momento de la
Fuerza de 200 N con respecto al punto 0 es Mo = F x d = (200 N) (0.51 m)
Mo = 102.85 N m
b).- En este caso tenemos que d = 0.8 m sen50º, d = 0.61 m. Como Mo debe ser igual a 102.85 N m 102.85 N m = Fx (0.61 m)
Fx = 167.82 N
c).- Como Mo = F x d el mínimo valor de la fuerza se obtiene cuando d es máximo. Se selecciona la fuerza perpendicular a OA y se observa que – d = 0.80 m. Mo = F x d 102.85 N m = F(0.80 m) F = 128.56 N 40º
Ejemplo.- Una fuerza de 800 N actúa sobre un soporte como se indica en la figura. Determínese el momento de la fuerza con respecto al punto B.
800 N

El momento de la fuerza F con respecto a B se obtiene A 60º formando el producto vectorial
MB = rA/B x F donde rA/B es el vector trazado desde B hasta A. Descompo- niendo rA/B y F en sus componentes rectangulares, tenemos:
160 mm rA/B = -(0.2 m)i + (0.16 m)jF = (800 N) cos 60º + (800 N) sen 60º, F = 400 Ni + 693 Nj
B MB = rA/B x F = - (0.2 m)i + (0.16 m)j x (400 N)i + (693 N)j
200 mm = -(138.6 Nm)k – (64 Nm)k = -(202.6 Nm)k
800 N Fy = (693 N) j
A 60º
Fx = (400 N)i
MB = 203 Nm
+ (0.16 m)j
B MB
-(0.2 m)i
Ejemplo.- Un ranchero usa el sistema de cuerda y polea que se muestra en la figura para impedir que el portón de un corral se cuelgue y para tirar del mismo y cerrarlo cuando se le deja abierto. Con el portón en la posición mostrada la fuerza en la cuerda es: F = 50i + 100j – 30k N. Esta fuerza actúa en C, la esquina del portón. El portón oscila alrededor del eje “y” Los puntos A, B, y C están ubicados en A(0, 0.75, 0); B:(1.6, 0.75, 1.2) y C:(1.6, 1.5, 1.2). Calcule:a).- ¿Cuál es le momento de F alrededor del origen O?b).- ¿Cuál es el momento que tiende a cerrar el portón? a).-
r = 1.6i + 1.5j + 1.2k mi j k
Y Mo = r x F = 1.6 1.5 1.2 50 100 -30
F w Mo = -165i + 108j + 85k Nm
C
A
o x B n b).-
z La magnitud del momento que tiende a cerrar el portón es la magnitud M de la componente y de Mo.
My = 108 Nm
TEOREMA DE VARIGNON.- La propiedad distributiva de los productos vectoriales puede usarse para determinar el momento de la resultante de varias fuerzas concurrentes. y F3
F4 Si las fuerzas F1, F2, ... están aplicadas en el mismo punto A y si el

vector de posición A es representado por r, tenemos:A
r x (F1 + F2 + ...) = r x F1 + r x F2 + ... r F1 F2
o x Es decir, “el momento con respecto a un punto dado O de la resul- tante de varias fuerzas concurrentes es igual a la suma de los momentos de las distintas fuerzas aplicadas sobre el mismo punto O”.
z
MOMENTO DE UNA FUERZA CON RESPECTO A UN EJE.- Consideremos una fuerza F que actúa sobre un cuerpo rígido y el momento Mo de esa fuerza con respecto a O. Sea OL un eje que pasa por O; definimos el momento MOL de F con respecto a OL, la proyección OC del momento Mo sobre el eje OL. Representando con el vector unitario a lo largo de OL tenemos:
MOL = Mo = (r x F) que muestra que el momento MOL de F con respecto al eje OL es el escalar obtenido al efectuar el triple producto escalar de , r y F.
L y
Expresando MOL en forma de determinante, escribimos C
F r A x y z
o x MOL = x y z z Fx Fy Fz
Donde x, y,z = Cosenos directores del eje OLx, y, z = coordenadas del punto de aplicación de F.Fx,Fy,Fz = Componentes de la fuerza F.
En general, el momento de una fuerza F aplicada en A con respecto a un eje que no pasa por el origen se obtiene escogiendo un punto arbitrario B sobre el eje y determinando la proyección sobre el eje BL del momento MB de F con respecto a B.
x y z MBL = xA/B yA/B zA/B
FX FY FZ

Ejemplo.- La plataforma rectangular está embisagrada en A y B y sostenida por un cable que pasa sobre un gancho sin fricción en E. Sabiendo que la tensión en el cable es 1349 N, determínese el momento con respecto a cada uno de los ejes coordenados de la fuerza que ejerce en el cable en C.
0.90 m 2.30 m
1.50 m Para la plataforma determínese el mo--momento con respecto a cada una de las coor-
A B x denadas de la fuerza que ejerce en el cable D.
2.25 m C D MED = MD = (r x F)
z
Ejemplo.- Un cubo de lado a está sujeto a una fuerza P como se indica en la figura. Determínese el momento de P:
a).- Con respecto de Ab).-Con respecto de la arista ABc).- Con respecto de la diagonal AG del cubo yd).- Usando el resultado del inciso anterior determínese la distancia perpendicular entre AG y FC.
D Ca).-
A B rA/B = ai – aj = a(i – j) P = (P/2 ) (j – k) a El momento P con respecto A es MA = rA/B x P
MA = a(i – j) x (P/2 ) (j – k)
G MA = (aP/2 ) (i + j + k) E F
b).-Proyectando MA sobre AB, escribimos MA = i – MA = i (aP/2 ) (i + j + k), MA = aP/2

Puesto que AB es paralela al eje X, comprobamos que MAB también es la componente y del momento MA.
c).- = AG /AG = (ai – aj – ak)/a3 = (1/3) (i – j – k)
MAG = MA = (1/3) (i – j – k) x (aP/2 ) (i + j + k) MAG = (aP/2)(1-1-1) MAG = -aP/6 d).-
P = (P/2) (j – k) – (1/3) (i – j – k) = (P/6)(0-1+1) = 0
MAG = -Pd = -aP/6) d = a/6
Reacciones en apoyos y conexiones
Las reacciones ejercidas sobre una estructura bidimensional pueden ser divididas en tres grupos que corresponden a tipos diferentes de apoyos y conexiones como se muestra en el siguiente cuadro

1.- Reacciones equivalentes a una fuerza cuya línea de acción es conocida.2.- Reacciones equivalentes a una fuerza de magnitud y dirección desconocidas.3.- Reacciones equivalentes a una fuerza y un par.
Centroides en algunas Líneas y Superficies

Centroides de algunos Volúmenes

Centroides de algunos Volúmenes
PROBLEMA
Una varilla delgada se ha doblado, dándole la forma que se indica en la figura. Localizar su centroide.

Unidad IV “Cinemática de la partícula”
POSICIÓN, VELOCIDAD Y ACELERACIÓN DE UNA PARTÍCULA
Una partícula que se mueve a lo largo de una recta tiene movimiento rectilíneo. En cualquier instante t, la partícula ocupará una cierta posición sobre la línea recta. Para definir dicha posición escogemos un origen fijo O sobre la recta y una dirección positiva a lo largo de la recta. Medimos la distancia x, de O a P y la registramos como positiva a la derecha del origen, en caso contrario será negativa. La distancia x con el signo apropiado define la posición de la partícula y se le llama coordenada de posición.
P´ O P
x Nota: Cada división en la recta representa 1 m
x´ x
La coordenada de posición correspondiente a P en la figura anterior es x = + 6 m; la coordenada correspondiente a P´es x´= - 2 m.
Conociendo la coordenada de posición x de una partícula para todo tiempo t, se dice que el movimiento de la partícula es conocido. El “itinerario” del movimiento puede expresarse en forma de una ecuación en x y t, como x = 5t3 – 2t4, o en la forma de una gráfica de x en función de t.
VELOCIDAD.- Puede definirse como el cambio de posición con respecto al tiempo. En el Sistema Internacional generalmente se expresa en m/s y en el Sistema Inglés en ft/s.
La velocidad instantánea v de la partícula en el instante t se obtiene de la velocidad promedio, escogiendo intervalos de tiempo t y desplazamientos x cada vez más cortos:
Velocidad instantánea = v = lím (x/ t) t 0
De otra manera más simple
ACELERACIÓN.- Se define como el cambio de velocidad con respecto al tiempo. Generalmente se mide en m/s2.
v = dx/dt

ó
Si la aceleración de una partícula o de un cuerpo es positiva significa que la velocidad va en aumento, en caso contrario, la velocidad va disminuyendo.
MOVIMIENTO RECTILÍNEO UNIFORME.- Es el movimiento más simple de todos. Se presenta cuando se recorren distancias iguales en tiempos iguales en una trayectoria recta.
MOVIMIENTO RECTILÍNEO UNIFORMEMENTE ACELERADO.- Se presenta cuando la partícula o cuerpo cambia su velocidad constantemente.
Ejemplo.- Una partícula se mueve a lo largo de una línea recta y su posición está definida por la ecuación x = 6t2 – t3 donde x se expresa en pies y el tiempo en segundos. ¿Cómo se expresaría la velocidad y aceleración en un tiempo determinado?
v = dx/dt v = 12t – 3t2 y derivando nuevamente obtenemos a = 12 - 6t
Ejemplo.- La posición de una partícula que se mueve a lo largo de una línea recta está definida por la relación x = t3 - 6t2 – 15t + 40, donde x se expresa en pies y el tiempo en segundos. Determínese: a).- el tiempo en el cual la velocidad será cero, b).- la posición y la distancia recorrida por la partícula en ese tiempo, c).- la aceleración de la partícula en ese instante y d).- la distancia recorrida por la partícula desde t = 4 s hasta t = 6s.
La ecuación del movimiento es x = t3 - 6t2 – 15t + 40. Si derivamos x con respecto a t obtenemos:v = 3t2 - 12t – 15 y si volvemos a derivar a = 6t – 12.
a).- El tiempo en que v = 0, 0 = 3t2 - 12t – 15 t2 - 4t – 5 = 0. De aquí que t1 = -1 s (imposible) y t2
= 5 s La velocidad es cero cuando t = 5 s
b).- Tomando el valor de t = 5 s x = (5)3 – 6(5)2 – 15(5) + 40, entonces x = 125 – 150 – 75 + 40 La distancia recorrida cuando t = 5 es de 60 ft a la izquierda del origen.
a = dv/dt a = d2x/dt2
x = xo + vt
vf = vo + at x = xo + vot + 1/2at2 vf2 = vo
2 + 2a(x - xo)

La posición original en t = 0 era xo = 40 ft. Como v ≠ 0 durante el intervalo 0 < t < 5 s, tenemos que la distancia recorrida es x5 - xo = - 60 - 40 = -100, entonces la distancia recorrida es de 100 ft en dirección negativa.
c).- Aceleración cuando v = 0 a = 6(5) – 12 = 30 – 12 Cuando la velocidad es cero a = 18 ft/s2
d).- Distancia recorrida desde t = 4 s hasta t = 6 s. Puesto que la partícula se mueve en la dirección negativa desde t = 4 s hasta t = 5 s y en dirección positiva de t = 5 s hasta t = 6 s, calcularemos por separado las distancias recorridas. De t = 4 s a t = 5 s: x5 = - 60 ft. x4 = (4)3 - 6(4)2 – 15(4) + 40, entonces x4 = -52 ft por lo que x5 – x4 = -60 – (-52) o sea la distancia recorrida es de 8 ft en dirección negativa.
De t = 5 s a t = 6 s: x5 = - 60 ft. x6 = (6)3 - 6(6)2 – 15(6) + 40, entonces x6 = -50 ft por lo que x6 – x5 = 10 ft. Entonces la distancia total recorrida de t = 4 s a t = 6 s es de 18 ft.
Ejemplo.- El movimiento de una partícula está definido por la relación x = 4t4 – 6t3 + 2t – 1, donde x está expresada en metros y t en segundos. Determine la posición, la velocidad y la aceleración de la partícula cuando t = 2 s.
x (2) = 4(2)4 – 6(2)3 + 2(2) – 1, x (2)= 4(16) – 6(8) + 4 – 1 = 64 – 48 + 3, entonces:
cuando t = 2 s, x = 19 m
v = 16t3 – 18t2 + 2 v(2) = 16(2)3 – 18(2)2 + 2 = 16(8) – 18(4) + 2. entonces:
cuando t = 2 s, v = 58 m/s
a = 48t2 – 36t a(2) = 48(2)2 – 36(2) = 48(4) – 36(2), entonces:
cuando t = 2 s, a = 120 m/s2
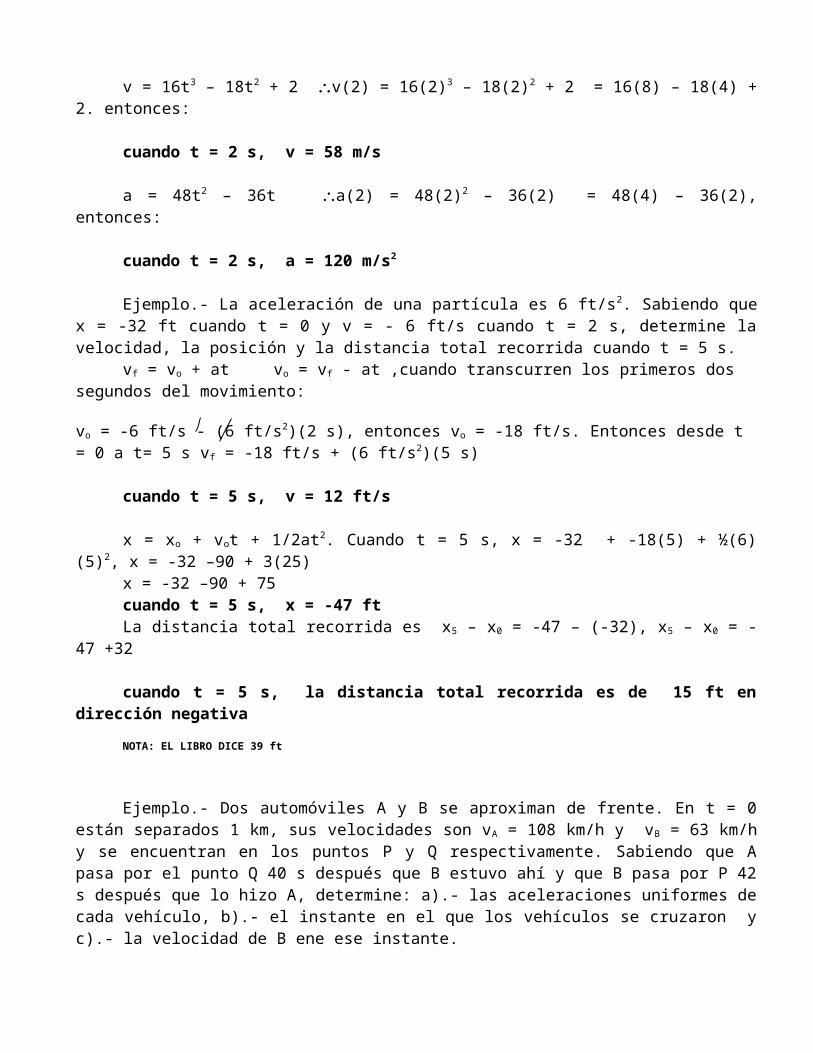
Ejemplo.- La aceleración de una partícula es 6 ft/s2. Sabiendo que x = -32 ft cuando t = 0 y v = - 6 ft/s cuando t = 2 s, determine la velocidad, la posición y la distancia total recorrida cuando t = 5 s.
a(ft/s2)
18
t(s)
0 +2 +5
x(ft)
40
0t(s)
+5
-60
v(ft/s)
40
0t(s)
+5

vf = vo + at vo = vf - at ,cuando transcurren los primeros dos segundos del movimiento:
vo = -6 ft/s - (6 ft/s2)(2 s), entonces vo = -18 ft/s. Entonces desde t = 0 a t= 5 s vf = -18 ft/s + (6 ft/s2)(5 s)
cuando t = 5 s, v = 12 ft/s
x = xo + vot + 1/2at2. Cuando t = 5 s, x = -32 + -18(5) + ½(6)(5)2, x = -32 –90 + 3(25)x = -32 –90 + 75cuando t = 5 s, x = -47 ftLa distancia total recorrida es x5 – x0 = -47 – (-32), x5 – x0 = -47 +32
cuando t = 5 s, la distancia total recorrida es de 15 ft en dirección negativa
NOTA: EL LIBRO DICE 39 ft
Ejemplo.- Dos automóviles A y B se aproximan de frente. En t = 0 están separados 1 km, sus velocidades son vA = 108 km/h y vB = 63 km/h y se encuentran en los puntos P y Q respectivamente. Sabiendo que A pasa por el punto Q 40 s después que B estuvo ahí y que B pasa por P 42 s después que lo hizo A, determine: a).- las aceleraciones uniformes de cada vehículo, b).- el instante en el que los vehículos se cruzaron y c).- la velocidad de B ene ese instante.
vA = 108 km/h (30 m/s) vB = 63 km/h (17.5 m/s)
P 1 km (1000 m) Q
a).- x - xo = vot + 1/2at2 a = 2 (x - xo) - vott2 aA = 2 (1000m) – (30 m/s)(40 s)40 s2
aA = - 0.25 m/s2
x - xo = vot + 1/2at2 a = 2 (x - xo) - vott2 a B= 2 (1000m) – (17.5 m/s)(42 s)42 s2
aB = 0.30 m/s2
b).- Para auto A x - xo = vot + 1/2at2 x - xo = (30 m/s)t + ½(-0.25 m/s)t2
x - xo = -0.125t2 + 30t
Para auto B x - xo = vot + 1/2at2 x - xo = (17.5 m/s)t + ½(0.30 m/s)t2
x - xo = 0.15t2 + 17.5t. Como la suma de los dos desplazamientos debe ser igual a 1000 m :
(-0.125t2 + 30t) + (0.15t2 + 17.5t) = 1000 0.025t2 + 47.5t – 1000 = 0. Resolviendo la ecuación anterior por la fórmula general obtenemos que t = 20.8 s

c).-vB = vo + at vB = 17.5 m/s + 0.3m/s2(20.8 s) vB = 23.75 m/s (85.5 km/h)
MOVIMIENTO RELATIVO DE DOS PARTÍCULAS.- Consideremos dos partículas A y B moviéndose a lo largo de la misma línea recta. Si las cordenadas de posición xA y xB se miden desde el mismo origen, la diferencia xB – xA define la coordenada de posición relativa de B respecto de A y se representa por xB/A.
xB/A = xB – xA o
o A B x
xA xB/A
xB
Independientemente de las posiciones de A y B con respecto al origen, un signo positivo para xB/A
significa que B está a la derecha de A; un signo negativo significa que B está a la izquierda de A.
La razón de cambio de xB/A se conoce como velocidad relativa de B con respecto a A.vB/A = vB – vA o
Un signo positivo para vB/A significa que desde A se observa que B se mueve en dirección positiva; un signo negativo significa que se le ve moverse en la dirección negativa. Así mismo:
La razón de cambio de vB/A se conoce como la aceleración relativa de B con respecto a A.aB/A = aB – aA o
MOVIMIENTOS DEPENDIENTES.- En algunos casos la posición de una partícula dependerá de otra u otras partículas. Se dice entonces que los movimientos son dependientes.
En el esquema, la posición del bloque B depende de la posi-ción del bloque A. Como la cuerda ACDEFG es de longitud cons-
G tante y también las longitudes de las porciones CD y EF de la cuer -da que pasan por las poleas, la suma de las longitudes de los segmen-
C D tos AC, DE y FG es constante. Observando que la longitud del seg--xA mento AC difiere de xA sólo por una constante y que las longitudes xB de los segmentos DE y FG difieren de xB sólo por una constante es- A cribimos: E F xA + 2 xB = constante
B Puesto que sólo una de las dos coordenadas xA y xB puede escogerse arbitrariamente, decimos que el sistema mostrado en la figura tiene un grado de libertad. De la relación entre las coorde-
nadas de posición xA y xB se deduce que si a xA se le da un incremento, ΔxA, esto es, si el bloque A es bajado una cantidad ΔxA, la coordenada xB recibirá un incremento ΔxB = 1/2 ΔxA; es decir, el bloque B se elevará la mitad de la misma cantidad, lo cual puede comprobarse fácilmente en la figura anterior.
En el caso de los tres bloques de la figura siguiente y siguiendo la analogía del sistema anterior:
xB = xA + xB/A
vB = vA + vB/A
aB = aA + aB/A

2xA + 2xB + xC = constante
Como dos de las coordenadas pueden escogerse arbitrariamente, decimos que el sistema de abajo tiene dos grados de libertad.
Cuando la relación existente entre las coordenadas deposición de varias partículas es lineal, se cumple una relaciónsemejante entre las velocidades y aceleraciones:
xA xC 2vA + 2vB + vC = 0
C 2aA + 2aB + aC = 0 XB
A
B
Ejemplo.- El collarín A y el bloque B están unidos con un cable que pasa por tres poleas, C, D y E. Las poleas C y E están fijas mientras que la polea D está unida a un collarín del que se tira hacia abajo con una velocidad de 3 in/s. En t = 0 el collarín A empieza a moverse hacia abajo desde la posición K con una aceleración constante. Y sin velocidad inicial. Sabiendo que la velocidad del collarín es de 12 in/s cuando pasa por el punto L, determínese el cambio de elevación, la velocidad y la aceleración del bloque B cuando el collarín A pasa por L.
C E Movimiento del collarín A. Colocamos el origen O en
K la superficie horizontal y escogemos la dirección positiva ha-cia abajo. Observamos que cuando t = 0 el collarín A está en
A en la posición K (vAo = 0). Como vA = 12 in/s y xA - xAo = 8 in D cuando el collarín pasa por L, escribimos:
8 invA
2 = vAo2 + 2aA(xA - xAo) = (12)2 = 0 + 2aA(8)
B 144 = 16aA aA = 9 in/s2
L El instante en el que el collarín A llega al punto L se
obtiene al escribir vA = vAo +2aAt 12 = 0 + 9t t = 1.333 s.
Movimiento de la polea D.- Tomando en cuenta que la dirección positiva es hacia abajo, escribimos:aD = 0 vD = 3 in/s xD = xDo + vDt = xDo + 3t. Cuando el collarín A llega a L en t = 1.333 s tenemos xD = xDo + 3(1.333 s) xD = xDo + 4 xD - xDo = 4 in
Movimiento del bloque B.- Notamos que la longitud total del cable ACDEB difiere de la cantidad(xA + 2xD + xB) sólo por una constante. Como la longitud del cable es constante durante el movimiento, esta cantidad también debe permanecer constante. En consecuencia, considerando los instantes t = 0 y t = 1.333 s, escribimos:
xA + 2xD + xB = xAo + 2xDo + xBo ----------- (1)
xA - xAo + 2( xD - xDo) + xB - xBo ----------- (2)

Pero sabemos que xA – xAo = 8 in y que xD – xDo = 4 in, entonces sustituimos estos valores en la ecuación (2) 8 + 2(4) + (xB - xBo) = 0 xB - xBo = -16 in
El cambio en la elevación del bloque B es de 16 in
Derivando la ecuación (1) dos veces obtenemos las ecuaciones que relacionan a las velocidades y a las aceleraciones de A, B y D. Sustituyendo los valores de las velocidades y las aceleraciones de A y D cuando t = 1.333 s obtenemos:vA + 2vD + vB = 0; 12 + 2(3) + vB = 0; vB = -18 in/s2 vB = 18 in/s2
aA + 2aD + aB = 0; 9 + 2(0) + aB = 0; aB = -9 in/s2 aB = 9 in/s2
MOVIMIENTO CURVILÍNEO.- Se presenta cuando la trayectoria del móvil cambia constantemente.
COMPONENTES RECTANGULARES DE LA VELOCIDAD Y LA ACELERACIÓN.- Si las coordenadas rectangulares de una partícula móvil P están dadas como funciones del tiempo:
x = f1(t), y = f2(t), z = f3(t)Las ecuaciones cartesianas de la trayectoria se obtienen eliminando t. Si esta eliminación es
imposible, la trayectoria queda aún determinada por las ecuaciones expresadas.
Puesto que el vector de posición de P es OP = r = xi + yj +zk, tenemos para su velocidad y la aceleración:
v = ar/dt = dx/dt(i) +dy/dt(j) + dz/dt(k) a = dv/dt = d2x/dt2(i) + d2y/dt2(j) + d2z/dt2(k)
Las componentes rectangulares de la velocidad y la aceleración son, por lo tanto:
vx = dx/dt, vy = dy/dt, vz = dz/dt; ax = d2x/dt2, ay = d2y/dt2, az = d2z/dt2
Ejemplo.- Encontrar las componentes de la velocidad y de la aceleración de la trayectoria para:1.- x = 80t, y = 80t – 16t2 vx = dx/dt, vx = d(80t)dt, vx = 80 i, vy = dy/dt, vy = d(80t – 16t2)/dtvy = (80 –32t) j v = 80 i + (80 –32t) j a = -32 j
2.- x = Asen nt, y = Bsen nt vx = dx/dt, vx = d(Asen nt)/dt, vx = Acos nt i, vy = dy/dt, vy= d(Bsen nt)/dtvy= Bcos nt j v = Ancos nt i + Bncos nt j a = -An2sen nt i - Bn2sen nt i
3.- x = sen t, y = cos t, z = sen t v = cos t i - sen t j + cos t k a = -sen t i –cos t j - sent k
MOVIMIENTO CIRCULAR.- Las partículas de un cuerpo que gira alrededor de un eje fijo, describen círculos cuyos centros se encuentran en el eje. Consideremos una partícula P girando en un círculo de radio r con centro en O.
P Entonces si s = arc AP y = AOP se miden en el mismo -sentido, s = r cuando se expresa en radianes. La rapidez de P es,
S por lo tanto v = ds/dt = r d/dt o v = r. Así, si el cuerpo está giran- x do a la velocidad de 4 rad/s, una partícula a 2 ft (0.61 m) del eje ten- A drá una velocidad de 8 ft/s (2.44 m/s). La aceleración de P tiene las
componentes tangencial y normal: at = dv/dt = r d/dt, an = v2/r, an = r2 2/rat = r an = r2

En estas importantes fórmulas el ángulo debe estar medido en radianes. Si r viene dado en pies o en metros, en rad/s, en radianes por segundo por segundo, at y an resultarán en pies por segundo por segundo o en metros por segundo por segundo.
Ejemplo.- La carga B se conecta a una polea doble mediante uno de los dos cables inextensibles mostrados. El cable C controla el movimiento de la polea, con una aceleración constante de 9 in/s 2 y una velocidad inicial de 12 in/s, ambas dirigidas hacia la derecha. Determínese a).- El número de revoluciones realizadas por la polea en 2 s, b).- la velocidad y el cambio de posición de la carga B después de 2 s y c).- la aceleración del punto D localizado en el borde de la polea interna cuando t = 0.
a).- Movimiento de la polea.- Como el cable esC inextensible, la velocidad del punto D es igual a la ve-
locidad del cable C y la componente tangencial de la - D aceleración de D es igual a la aceleración de C.
r =3 in R = 5 in vDo = vCo = 12 in/s aDt = aC = 9 in/s2
Como la distancia D al centro de la polea es de3 in, escribimos vDo = ro, 12 in/s = 3 ino
B o = 4 rad/s aDt = r, 9 in/s2 = 3 in
= 3 rad/s2
Para t = 2 s = o + t = 4 rad/s + 3 rad/s2 (2s) = 10 rad/s
= ot + 1/2t2 = 4 rad/s (2s) + ½(3 rad/s2)(2s)2 = 14 rad, entonces el número de revoluciones efectuadas en los dos segundos será 14 rad (1 rev/2rad)
Nº de revoluciones = 2.23 revoluciones
b).- Movimiento de la carga B.- Con las siguientes relaciones entre los movimientos lineal y angular, y sabiendo que R = 5 in tenemos:
vB = r = 5 in (10 rad/s) = 50 in/s vB = 50 in/s
yB = r = 5 in (14 rad) = 70 in yB = 70 in
c).- Aceleración del punto D cuando t = 0.- La componente tangencial de la aceleración es: aDt = aC = 9 in/s2 . Dado que cuando t = 0 o = 4 rad/s, la componente normal de la aceleración es aDn = rDo
2 = 3 in(4 rad/s)2 = 48 in/s2, aDn = 48 in/s2
La magnitud y la dirección de la aceleración total se obtiene escribiendo tan = (48 in/s2)/( 9 in/s2) = 79.4º aDsen 79.4º = 48.8 in/s2 aD = 48.8 in/s2 79.4º
aDt = 9 in/s2
aDn = 48 in/s2
aD Ejemplo.- La resistencia de un freno retarda uniformemente un volante desde 120 a 60 r.p.m.
mientras que efectúa 12 revoluciones. Encontrar v, at, an para una partícula situada a 3 ft (0.91 m) del eje cuando ω = 90 r.p.m.
Puesto que α es constante, tenemos integrando αdθ = ωdω en el intervalo de frenado: 12 60

α∫o dθ = ∫120 ωdω o 12 α = ½ (602 – 1202) α = -450 rev/min, luego, cambiando unidades a radianes y segundos, tenemos en el instante en cuestión: ω = (90)(2π) /60, ω = 3 π rad/s, α = (-450*2 π)/60*60), α = - π /4 rad/s2
v = 3 * π = 28.7 ft/s = 8.62 m/s at = -3/4 π = -2.356 ft/s2 = -0.719 m/s2 an = 3*(3π)2 = 81.28 m/s2
Ejemplo.- La resistencia de un freno se aplica a un volante que efectúa 180 rev./min. Si el volante gira 180 revoluciones antes de detenerse, encontrar su aceleración angular ( que se supone constante) y el tiempo en el que se verifica la pérdida de velocidad.
Como ω varía de 180 a 0 r.p.m. mientras que θ varía desde 0 a 30 revoluciones, integrando y escribiendo que αdθ = ωdω, entre los límites referidos tenemos 30 0
α∫o dθ = ∫180 ωdω = o 30 α = ½ (02 – 1802) α = -540 rev/min. Si deseamos expresar α en rad/s2
α = -540 * 2 π/602 = - 3 π /10 = -0.942 rad/s2. Si Δt denota el tiempo de duración del frenado, tenemos, puesto que α es constante α = Δω/Δt o –540 = -180/Δt Δt = 1/3 min (20 segundos).
MOVIMIENTO DE UN PROYECTIL.- El movimiento de un proyectil en el vacío se estudia con frecuencia en términos de sus componentes rectangulares, ya que la aceleración del proyectil siempre actúa en la dirección vertical consideraremos que: aceleración constante ac = g = 9.81 m/s2 ó 32.2 ft/s2
ay = -g, ax = 0
y
vx
vo vy v vyo
vxo
y yo x
xo
x
MOVIMIENTO HORIZONTAL MOVIMIENTO VERTICALComo la dirección positiva del eje Y apunta hacia arriba, entonces ay = -g
v = vo + at, como ax = 0 v = vxo vy = vyo -gt
x = xo + vot + ½ at2 x = xo + vxot y = yo + vyot – ½ gt2
v2 = vo2 + 2a(y –yo) vx = vxo vy
2 = vyo2 – 2g(y – yo)
Ejemplo.- De un tubo se expulsa una pelota como se muestra en la figura a una velocidad horizontal de 12 m/s. Si la altura deltubo es de 6 m sobre el piso, calcule el tiempo que necesita la pelota para llegar al piso y el alcance R.
vAx = 12 m/s vAy = 0 g = -9.81 m/s2
y Como vAx = vBx = 12 m/s las tres incógnitas son vBy, R y el tiempo t
A 12 m/s Movimiento vertical: y – yo = vyo – ½ gt2 a = -g 6 – 0 = 0 - ½ (-9.81 m/s2)t2 t = 1.11 s
6 m

Movimiento horizontal: x - xo = vot, R = 0 + 12(1.11) R = 13.3 m
C B
R
Ejemplo.- Se arrroja una pelota desde una posición 5 ft sobre el piso, hacia el techo de un edificio de 40 ft de alto. Si la velocidad inicial de la bola es de 70 ft/s inclinada 60º con la horizontal; calcule el alcance o distancia horizontal R, desde el punto en que se arroja la pelota hasta donde choca con el techo.
Vxo = 70 cos 60º Vxo = 35 ft/s
Vyo = 70 sen 60º Vyo = 60.62 ft/s B A
Movimiento horizontal: xA = xo + vxo tAo R = 35 tAo
h 40 ft Movimiento vertical:
5 ft yA = yo + vyo tAo + ½ a tAo2
40 – 5 = 0 + 60.62 tAo + ½ (-32.2) tAo2
R tAo = tBo = 0.712 s y R = 107 ft
Unidad V “Cinemática del cuerpo rígido”
MOVIMIENTO DEL CUERPO RÍGIDO.- Un cuerpo rígido se puede sujetar a tres tipos de movimiento plano, que son traslación, rotación con respecto a un eje fijo y movimiento plano en general.
Cuando todas las partículas de un cuerpo rígido se mueven a lo largo de trayectorias equidistantes a un plano fijo, se dice que el cuerpo tiene movimiento plano.
TRASLACIÓN.- Este tipo de movimiento se presenta si cualquier segmento de línea en el cuerpo permanece paralelo a su dirección original durante todo el movimiento.
Trayectoria rectilínea de traslación (líneas rectas equidistantes)
Trayectoria curvilínea de traslación (curvas equidistantes)
ROTACIÓN CON RESPECTO A UN EJE FIJO.- Cuando uncuerpo rígido gira con respecto a un eje fijo, todas sus partículas, excepto lasque se encuentran en el eje de rotación se mueven en trayectoria circulares.
Eje de rotación
MOVIMIENTO GENERAL EN EL PLANO.- Cuando un cuerpo rígido está sujeto al movimiento general en el plano, presenta una combinación de traslación y también de rotación.
Unidad VI “Dinámica de la partícula”
En esta unidad se estudiará la cinética de los cuerpos rígidos; es decir, las relaciones existentes entre las fuerzas que actúan en un cuerpo rígido, la forma y la masa del mismo, y el movimiento producido.
2a LEY DE NEWTON.- Al aplicar una fuerza a un cuerpo, la aceleración producida es directamente proporcional a la fuerza aplicada e inversamente proporcional a la masa del mismo.
a = F/m F = ma
ECUACIONES DE MOVIMIENTO PARA UN CUERPO RÍGIDO
F = m a y F1 masa aceleración del centro
de masa G F2
G F3
F4
O x

z
x y´ MG = HG Razón de cambio de HG
mi
G x´ z´
O x HG
z F1 F2
m a F4
G = G
F3
CANTIDAD DE MOVIMIENTO ANGULAR DE UN CUERPO RÍGIDO EN MOVIMIENTO PLANO
HG = Iw HG = Iw = I
MOVIMIENTO PLANO DE UN CUERPO RÍGIDO. PRINCIPIO DE DÁLEMBERT.
“Las fuerzas externas que actúan sobre un cuerpo rígido equivalen a las fuerzas efectivas de las diversas partículas que forman el cuerpo”
F = m ax F = m ay MG = I
Ejemplo.- La caja de la figura se encuentra en reposo sobre una superficie horizontal cuyo coeficiente de fricción cinética es de μk = 0.3. Si la caja no se voltea cuando es sometida a un tirón de 400 N, determine la velocidad de la caja a los 5 s de comenzar a moverse.
50 kg P = 400 N DIAGRAMA DE CUERPO LIBRE W = 490.5 N
30º 400 N
30ºF = 0.3 Nc
NcW = mg = 50 kg * 9.81 m/s2 W = 490.5 N

ECUACIONES DEL MOVIMIENTO
+ Σ Fx = max ; 400 N cos30º - 0.3 Nc = 50 kg a Ec. (1)
+ Σ Fy = may ; Nc – 490.5 N + 400 Nsen30º = 0 Ec. (2) Nc = 490.5 –400 sen30ºNc = 290.5 N
Sustituyendo el valor de Nc en la ecuación 1 a = 5.19 m/s2
CINEMÁTICA.- Como la aceleración es constante y la velocidad inicial es nula, la velocidad final de la caja a los 5 segundos es vf = vo + at v = 0 + 5.19 m/s2 * 5 s vf = 26 m/s
Ejemplo.- Se dispara verticalmente hacia arriba un proyectil que parte del suelo con una velocidad de 50 m/s. Calcule la altura máxima que alcanzará si a).- se desprecia la resistencia de la atmósfera; b).- si se determina la resistencia de la atmósfera y resulta FD = (0.001 v2)N, siendo v la velocidad del proyectil en cualquier instante.
m = 10 kg SOLUCIÓN.- En ambos casos se puede relacionar la fuerza conocida sobre el proyectil con su aceleración. Empleando la ecuación del movimiento a continua-ción se puede emplear la cinemática para relacionar la aceleración del proyectil con
hmáx su posición.
a).- DIAGRAMA DE CUERPO LIBRE hmáx w = mg; w =150 kg*9.81 m/s2 w = 98.1 N
ECUACIÓN DEL MOVIMIENTO a
+ Σ Fy = may -98.1 N = 10 kg(a) a = 9.81 m/s2
El resultado indica que el proyectil, como cualquier objeto --
98.1 N tenga movimiento libre cerca de la superficie terrestre, está sujeto auna aceleración constante igual a 9.81 m/s2
CINEMÁTICA.- yo = 0, vo = 50 m/s y en la altura máxima v = 0
vy2 = vyo
2 – 2g(y – yo) 0 = (50)2 + 2(-9.81)(hmáx – 0) hmáx = 127 m
b).- DIAGRAMA DE CUERPO LIBRE
FD hmáx Como la fuerza FD = (0.001 v2)N tiende a retardar el movi--miento hacia arriba del proyectil, actúa hacia abajo como se mues-tra en el Diagrama de cuerpo libre.
a
ECUACIÓN DEL MOVIMIENTO + Σ Fy = may 98.1 N -0.001v2 – 98.1 N = 10(a) a = - 0.001 v2 - 9.81

CINEMÁTICA.- Aquí la aceleración no es constante; sin embargo se puede relacionar con la velocidad y el desplazamiento por medio de ady = vdv; (-0.001v2 – 9.81)dy = vdv.
Separando variables e integrando, teniendo en cuenta que al principio yo = 0, vo = 50 m/s y que cuando y = hmáx, v= 0, tenemos que: hmáx 0 0
0 dy = 50 vdv/(-0.001v2 + 9.81); -500lnv2 + 981050
hmáx = 113 mEjemplo.- Cuando la velocidad hacia adelante del tractor de la figura era de 30 ft/s, de repente se
aplicaron los frenos, lo que hizo que las cuatro ruedas dejaran de girar. Se observó que el tractor patinó 20 ft antes de detenerse. Determínese la magnitud de la reacción normal y la fuerza de fricción en cada rueda cuando patinó el tractor.
CINEMÁTICA DEL MOVIMIENTO
vo = 30 ft/s v2 = vo2 + 2ax 0 = (30)2 + 2a(20)
G a = -22.5 ft/s2 a = 22.5 ft/s2
4 ft ECUACIONES DEL MOVIMIENTO
A 5 ft 7 ft B + Σ Fy = may NA + NB – w = 0
FA + FB = k (NA + NB) = kw
+ Σ Fx = max - (FA + FB) = - ma - kw = (w/32.2 ft/s2) (22.5 ft/s2) k = 0.699
+ Σ MA = - w (5 ft) + NB (12 ft) = ma = (w/32.2 ft/s2) (22.5 ft/s2) (4 ft) NB = 0.650 w
FB = kNB = (0.699)(0.650 w) FB = 0.454 w + Σ Fy = may NA + NB – w = 0
NA + 0.650 w – w = 0 NA = 0.350 w FA = k NA = (0.699)(350 w) FA = 0.245 w
Reacciones en cada rueda.- Recordando que los valores hacia arriba calculados representan la suma de las reacciones en las dos ruedas delanteras o en las dos traseras, obtenemos la magnitud de las reacciones en cada rueda al escribir:
Ndelantera = ½NB = 0.325w Ntrasera = ½ NA = 0.175 w
Fdelantera = ½FB = 0.227w Ftrasera = ½ FA = 0.122 w
Ejemplo.- Los dos bloques representados están en reposo sobre una superficie horizontal.cuando se aplica una fuerza F al bloque B. Los pesos de los bloques A y B son, respectivamente, 225 N y 375 N. El coeficiente de rozamiento estático s entre los bloques es de 0.25 y el coeficiente de rozamiento cinético k entre la superficie horizontal y el bloque B vale 0.20. Determine la máxima fuerza F que puede aplicarse al bloque B antes de que los bloques dejen de moverse juntos.
y wA NB
A wB sNA

B F x A B F sNA
NA NB kNB
ECUACIONES DEL MOVIMIENTO PARA EL BLOQUE A
+ Σ Fy = 0 NA – wA = 0 NA = 225 N + Σ Fx = mAax sNA = mAax
(0.25)(225 N)= (225 N/9.81 m/s2) ax
ax = 2.45 m/s2 Como sNA es la máxima fuerza de rozamiento que puede desarrollarse en la superficie de contacto entre los bloques A y B. ax(máx.) = 2.45 m/s2
ECUACIONES DEL MOVIMIENTO PARA EL BLOQUE B
+ Σ Fy = 0 NA – NB - wB = 0 NB = NA + wB NB = 225 + 375 NB = 600 N + Σ Fx = mAax F - sNA - kNB = mBax = (375 N/9.81 m/s2) (2.45 m/s2) + (0.25) (225 N) + (0.20)(600 N)
F = 270 N


















