
GUÍA MÉTODO DE RIGIDEZ MATRICIAL. -...
29
Universidad de Santiago de Chile Facultad de Ingeniería Depto. de Ingeniería en Obras Civiles GUÍA MÉTODO DE RIGIDEZ MATRICIAL. Profesor: Héctor González. Realizado por: Sergio Currilen. Diego Valdivieso.
Transcript of GUÍA MÉTODO DE RIGIDEZ MATRICIAL. -...

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 0
Universidad de Santiago de Chile
Facultad de Ingeniería
Depto. de Ingeniería en Obras Civiles
GUÍA MÉTODO DE RIGIDEZ
MATRICIAL.
Profesor:
Héctor González.
Realizado por:
Sergio Currilen.
Diego Valdivieso.

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 1
Algoritmo Método de Rigidez.
a) Redución estructura y/o Modelación.
b) Determinar Grados de libertad.
c) Enumerar y asignar sentido de cada barra de la estructura.
d) Determinación de Grados de libertad independiente mediante
compatibilidades geométricas y definición de matriz [T] de transformación.
e) Momentos de empotramiento perfecto ( EST A_Esfuerzos σA + EST B).
f) Matrices de compatibilidad geométrica para cada barra.
g) Matriz [a].
h) Matrices constitutivas para cada barra.
, -
i) Matriz constitutiva diagonal , -
j) Matriz de la estructura asociada a todos los G.D.L , - , - , - , -.
k) Matriz de rigidez asociada a los grados de libertad independientes de la
estructura.
, - , - , - , -
grados de libertad( )
r1
r2
... ri
... rn
ua va ϕa ub vb ϕb
δ1
…
a
ϴ1a
ϴ1b
…
…
ϴna
ϴn
b δn
ai
sin ( )
L
sin ( )
L
cos ( )
cos ( )
L
cos ( )
L
sin ( )
1
0
0
sin ( )
L
sin ( )
L
cos ( )
cos ( )
L
cos ( )
L
sin ( )
0
1
0
cos
ϴa
ϴb
δ
AEI
AE
EI

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 2
l) Vector de cargas externas asociada a todos los GDL {R}, y vector de cargas
externas referidos a GDL independientes {Q} = , - * +
m) Compatibilidad de grados de libertad independientes {r} = [ T ]*{q}.
n) Ley de Hooke Matricial * + = , - * +
o) Esfuerzos internos {σB} , - , - , -.
p) Esfuerzos totales de la estructura {σT} = {σA} + {σB}, despieces y diagramas
de M, V, N.
Compatibilidades geométricas.
- Barra EI inclinada.
tan(α)=
- Barra infinitamente rígida horizontal.
ϕ*L= vb - va
- Barra infinitamente rígida inclinada.
ϕ*Lv= ua - ub
Lv= Lsen(α)
ϕ*LH= vb - va
LH= Lcos(α)
a
b
α
va
vb
ub
ua
ϕb
ϕa
ϕ
u
vb va
a b
L
ub
ua
vb
va
ϕ b
a
LH
Lv
L
α
Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 3
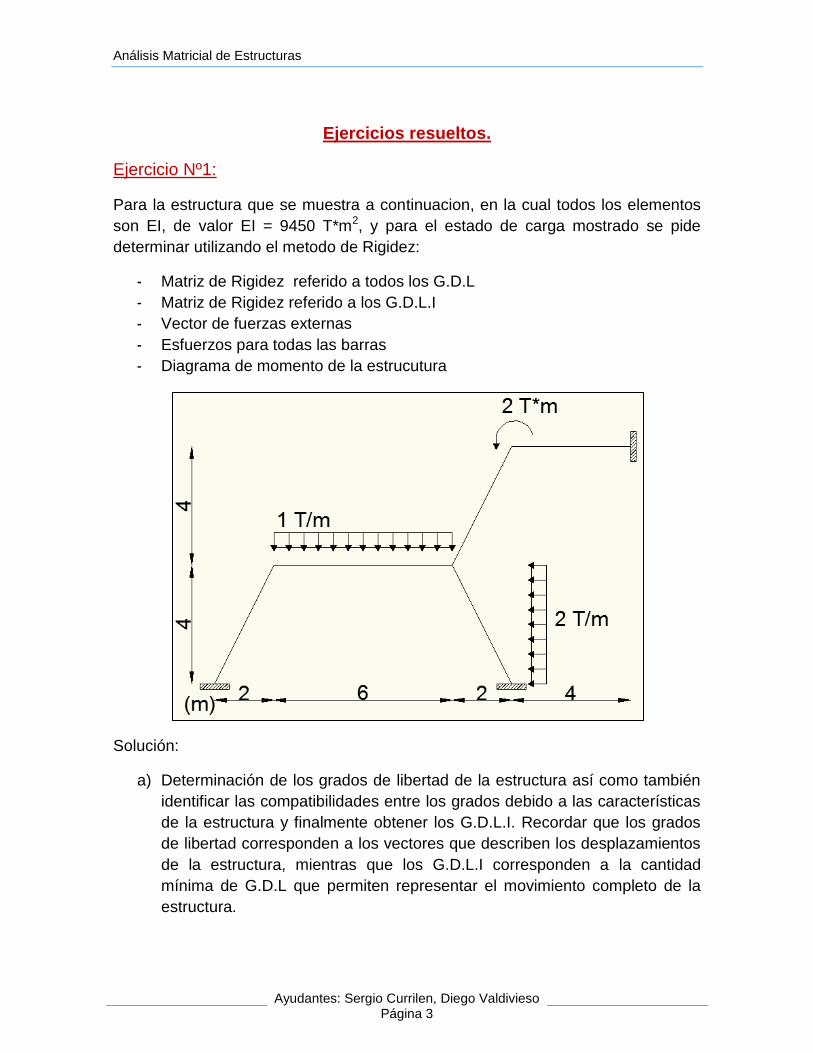
Ejercicios resueltos.
Ejercicio Nº1:
Para la estructura que se muestra a continuacion, en la cual todos los elementos
son EI, de valor EI = 9450 T*m2, y para el estado de carga mostrado se pide
determinar utilizando el metodo de Rigidez:
- Matriz de Rigidez referido a todos los G.D.L
- Matriz de Rigidez referido a los G.D.L.I
- Vector de fuerzas externas
- Esfuerzos para todas las barras
- Diagrama de momento de la estrucutura
Solución:
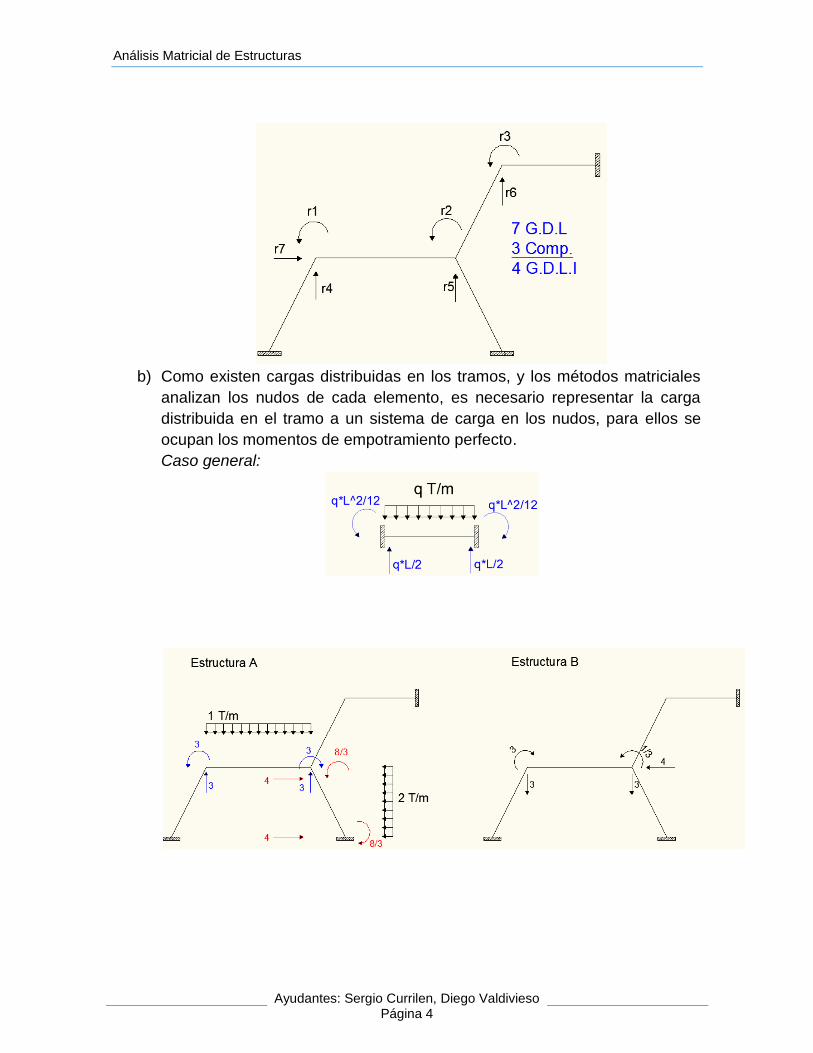
a) Determinación de los grados de libertad de la estructura así como también
identificar las compatibilidades entre los grados debido a las características
de la estructura y finalmente obtener los G.D.L.I. Recordar que los grados
de libertad corresponden a los vectores que describen los desplazamientos
de la estructura, mientras que los G.D.L.I corresponden a la cantidad
mínima de G.D.L que permiten representar el movimiento completo de la
estructura.
Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 4
b) Como existen cargas distribuidas en los tramos, y los métodos matriciales
analizan los nudos de cada elemento, es necesario representar la carga
distribuida en el tramo a un sistema de carga en los nudos, para ellos se
ocupan los momentos de empotramiento perfecto.
Caso general:
Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 5
a10.2
0.2
0.1
0.1
1
0
0.2
0.2
0.1
0.1
0
1
K 1( )
8452.337
4226.168
0
4226.168
8452.337
0
0
0
0
a20.2
0.2
0.1
0.1
1
0
0.2
0.2
0.1
0.1
0
1
R
3
1
3
2
3
3
0
4
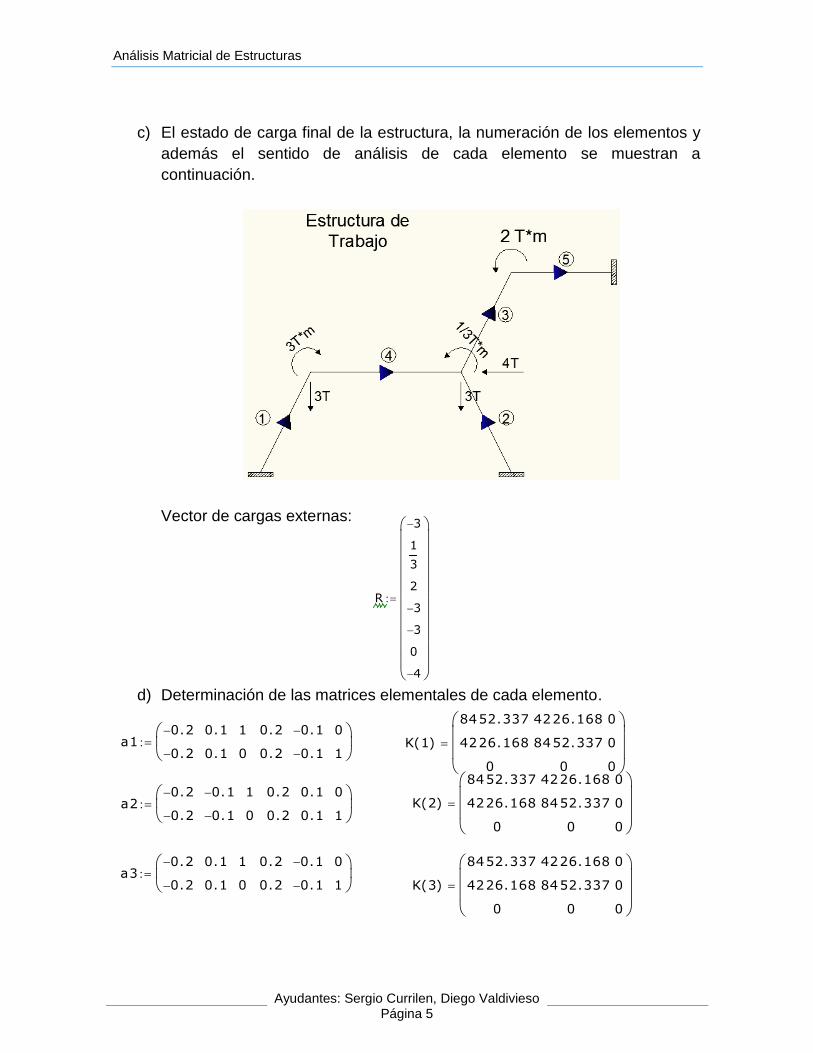
c) El estado de carga final de la estructura, la numeración de los elementos y
además el sentido de análisis de cada elemento se muestran a
continuación.
Vector de cargas externas:
d) Determinación de las matrices elementales de cada elemento.
K 2( )
8452.337
4226.168
0
4226.168
8452.337
0
0
0
0
K 3( )
8452.337
4226.168
0
4226.168
8452.337
0
0
0
0
a30.2
0.2
0.1
0.1
1
0
0.2
0.2
0.1
0.1
0
1

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 6
k
2
20
1
20
0
0
0
0
0
0
0
0
1
20
2
20
0
0
0
0
0
0
0
0
0
0
2
20
1
20
0
0
0
0
0
0
0
0
1
20
2
20
0
0
0
0
0
0
0
0
0
0
2
20
1
20
0
0
0
0
0
0
0
0
1
20
2
20
0
0
0
0
0
0
0
0
0
0
1
3
1
6
0
0
0
0
0
0
0
0
1
6
1
3
0
0
0
0
0
0
0
0
0
0
1
2
1
4
0
0
0
0
0
0
0
0
1
4
1
2
2 9450
e) Acoplamiento de las matrices.
K 4( )
6300
3150
0
3150
6300
0
0
0
0
K 5( )
9450
4725
0
4725
9450
0
0
0
0
a4
0
0
1
6
1
6
1
0
0
0
1
6
1
6
0
1
a5
0
0
1
4
1
4
1
0
0
0
1
4
1
4
0
1

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 7
f) Determinación de la matriz de rigidez referida a todos los grados de libertad
de la estructura, en que:
, - , - , - , -
g) Ahora se debe determinar la matriz de compatibilidades geométricas para
los grados de libertad, las compatibilidades existentes en esta estructura
son del tipo:
( )
Luego la matriz de compatibilidades es de acuerdo a la expresión { r } = [ T ]*{ q }.
h) La matriz de rigidez referida a los G.D.L.I es determinada de acuerdo a la
expresión:
[ ] , - , - , -
KT
14752.337
3150
0
307.152
1575
0
2535.702
3150
23204.674
4226.168
1575
960.697
1267.848
0
0
4226.168
17902.337
0
1267.848
2275.902
2535.702
307.152
1575
0
778.569
525
0
507.14
1575
960.697
1267.848
525
1032.138
253.569
0
0
1267.848
2275.902
0
253.569
2025.444
507.14
2535.702
0
2535.702
507.14
0
507.14
3042.844
T
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0.5
0.5
1
1
Kq
14752.337
3150
0
1594.626
3150
23204.674
4226.168
1575
0
4226.168
17902.337
374.124
1594.626
1575
374.124
7051.315

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 8
Q
3
0.333
2
4
Q TTR
i) Determinación del vector de fuerzas externas equivalente a los G.D.L.I.
=>
j) Resolución del sistema [Kq]*{ q } = { Q }, de esto se procede a determinar
los desplazamientos de los G.D.L.I para luego determinar los
desplazamientos en todos los G.D.L.
k) Determinación de los esfuerzos de acuerdo a la expresión * + , - * +
R
3
1
3
2
3
3
0
4
q
1.381 104
2.78 105
1.298 104
5.491 104
r
1.381 104
2.78 105
1.298 104
2.746 104
2.746 104
5.491 104
5.491 104
B
2.324
2.908
1.858
1.976
2.054
2.72
0.092
0.255
0.72
1.333
BB

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 9
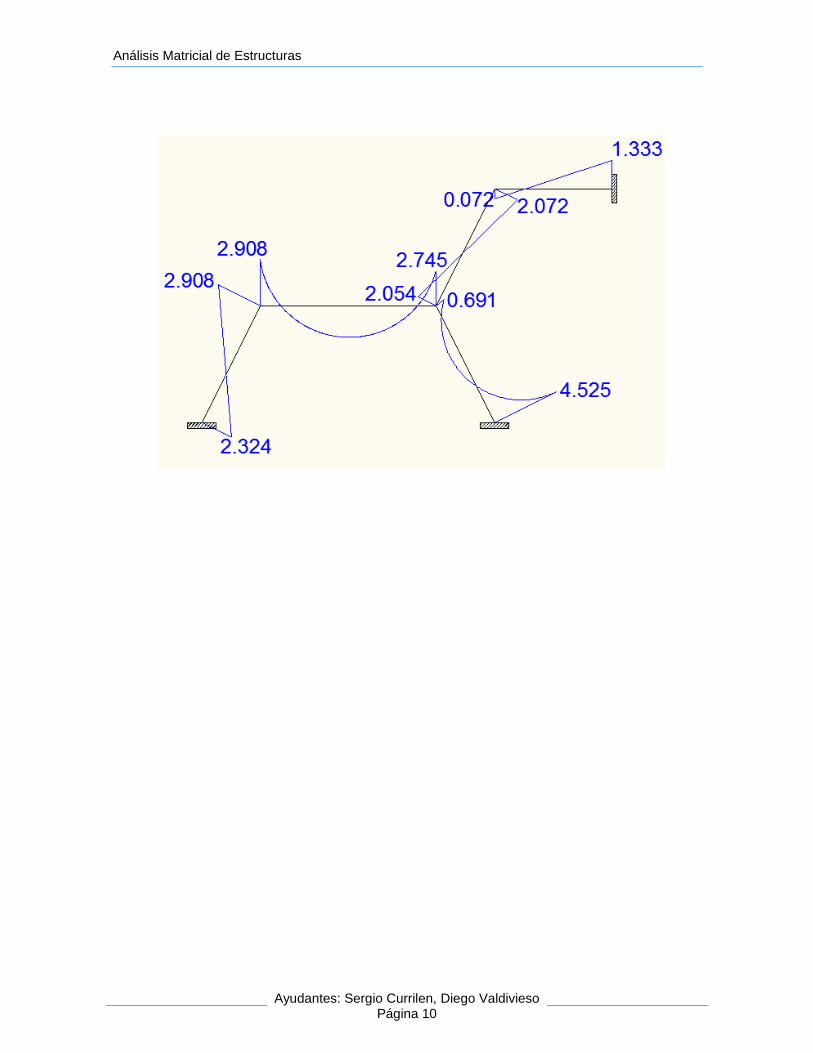
l) Determinación de esfuerzos finales, que corresponde a sumar los esfuerzos
obtenidos anteriormente a los esfuerzos de empotramiento perfecto de la
estructura A, además se procede a trazar el diagrama de momento.
Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 10

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 11
0 r4
r6
01
r5
r4
r6
01
Ejercicio Nº2.
La estructura mostrada se debe reforzar con un resorte de rigidez k para controlar
el descenso del vértice superior. Determine la rigidez del elemento que se incluye
para disminuir el descenso en un 25%.
Dato: Considere que ambas estructuras son iguales y están solicitadas por la
misma fuerza P, solo se diferencian en el resorte añadido.
Desarrollo: Como se reducirá el descenso vertical, primero se debe calcular el desplazamiento sin el resorte, por lo mismo trabajamos con la estructura (1).
i) Grados de Libertad / Enumeración de barras y sentido de análisis.
ii) Compatibilidades geométricas y matriz [T] de transformación.
=> r4 = - r6
=> r5 = -2r6
k
L
(2)
EI EI
L L
P
(1)
1
r1
2
r2
r3
r5
r4
r6 GDL = 6
3 Compatibilidades.
GDLI= 4

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 12
T
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
2
1
a1
0.5
L
0.5
L
0.5
L
0.5
L
1
0
0.5
L
0.5
L
0.5
L
0.5
L
0
1
a2
0.5
L
0.5
L
0.5
L
0.5
L
1
0
0.5
L
0.5
L
0.5
L
0.5
L
0
1
iii) Matriz de compatibilidad geométrica [a].
Por barra.
Para barra 1_ α=45º y Largo=L√
Para barra 2_ α=135º y Largo=L√
ua va ϕa ub vb ϕb
ai
sin ( )
L
sin ( )
L
cos ( )
cos ( )
L
cos ( )
L
sin ( )
1
0
0
sin ( )
L
sin ( )
L
cos ( )
cos ( )
L
cos ( )
L
sin ( )
0
1
0
cos
ϴa
ϴb
δ
AEI
AE
EI
ϴ1a
ϴ1b
ϴ2a
ϴ2b
r1 r2 r3 r6
r1 r2
r4
r3
r5
r6

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 13
a
1
0
0
0
0
1
0
1
0
0
1
0
0.5
L
0.5
L
0.5
L
0.5
L
0
0
0.5
L
0.5
L
0.5
L
0.5
L
0.5
L
0.5
L
ki
4EI
L
2EI
L
0
2EI
L
4EI
L
0
0
0
AE
L
k1
EI
L
2 2
2
2
2 2
k2
k1
kEI
L
2 2
2
0
0
2
2 2
0
0
0
0
2 2
2
0
0
2
2 2
Para la estructura.
iv) Matriz de Rigidez asociada a las deformaciones ϴa, ϴb, y δ.
Matriz Constitutiva por barra.
Matriz Constitutiva para la estructura.
r1 r2 r3 r4 r5 r6
ϴ1a
ϴ1b
ϴ2a
ϴ2b
ϴa
ϴb
δ

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 14
KT
EI
2.828
L
1.414
L
0
2.121
L2
0
2.121
L2
1.414
L
5.657
L
1.414
L
4.242
L2
2.121
L2
0
0
1.414
L
2.828
L
2.121
L2
2.121
L2
2.121
L2
2.121
L2
4.242
L2
2.121
L2
4.242
L3
2.121
L3
0
0
2.121
L2
2.121
L2
2.121
L3
2.121
L3
2.121
L3
2.121
L2
0
2.121
L2
0
2.121
L3
4.242
L3
Kq
EI
2.828
L
1.414
L
0
4.243
L2
1.414
L
5.657
L
1.414
L
0
0
1.414
L
2.828
L
4.243
L2
4.243
L2
0
4.243
L2
16.971
L3
v) Matriz de Rigidez asociada a todos los GDL de la estructura.
KT=aT*k*a
vi) Matriz de Rigidez asociada a los GDL independientes.
Kq=TT*KT*T
r1 r2 r3 r4 r5 r6
r1 r2 r3 r6

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 15
r
r1
r2
r3
r4
r5
r6
R
0
0
0
0
0
P
Q
0
0
0
P
r1= -0.354 PL2/EI
r2= 0
r3= 0.354 PL2/EI
r6= -0.236 PL3/EI
q
r1
r2
r3
r6
6
vii) Vector de cargas externas y vector de GDL independientes.
Vectores para todos los grados de libertad
Vectores para GDL independientes
pero {Q}=[T]T*{R} =>
viii) Ley de Hooke matricial.
{Q}=[Kq]*{q}
=> Valor del descenso superior. Su
valor
es negativo debido a que definimos
el GDL hacia arriba, por ende nos
verifica que estamos frente a un
descenso del punto.
Luego mediante la ecuación {r}= [T]*{q}, obtenemos las incógnitas
restantes:
r4= 0.236 PL3/EI y r5= 0.471 PL3/EI

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 16
ix) Cálculo de rigidez del resorte.
Como se introduce el resorte (estructura 2) para disminuir el desplazamiento
vertical en un 25% implica que se reduce al 75%. Entonces:
r6’= 0.75 * -0.236 PL3/EI => r6
’= -0.177 PL3/EI
Para obtener este desplazamiento se agregó el resorte mostrado en la estructura
(2). Como se observa esta rigidez actúa en el sentido del GDL r5, por ende
sumamos directamente la incógnita k en el coeficiente C55 de la matriz KT, ya que
solo otorga rigidez en esa dirección, obteniendo la nueva matriz de rigidez de
todos los grados de libertad:
Utilizando nuevamente [Kq’]= [T]T*[KT’]*[T]
Tenemos:
r1 r2 r3 r4 r5 r6
r1 r2 r3 r6
KT
EI
2.828
L
1.414
L
0
2.121
L2
0
2.121
L2
1.414
L
5.657
L
1.414
L
4.242
L2
2.121
L2
0
0
1.414
L
2.828
L
2.121
L2
2.121
L2
2.121
L2
2.121
L2
4.242
L2
2.121
L2
4.242
L3
2.121
L3
0
0
2.121
L2
2.121
L2
2.121
L3
2.121
L3
k
2.121
L3
2.121
L2
0
2.121
L2
0
2.121
L3
4.242
L3
‘
Kq
EI
2.828
L
1.414
L
0
4.243
L2
1.414
L
5.657
L
1.414
L
0
0
1.414
L
2.828
L
4.243
L2
4.243
L2
0
4.243
L2
16.971
L3
4k
‘

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 17
q
r1
r2
r3
0.177PL
3
EI
Q
0
0
0
P
Nota: Si se hubiera dejado el grado de libertad r5 como grado independiente
hubiera bastado con agregar la rigidez k del resorte directamente en la matriz Kq’,
ahorrando un paso en el cálculo y por ende tiempo. Además cabe notar que como
r5 es dependiente r6, es por eso que igualmente aparece nuestra incógnita en la
nueva matriz.
Finalmente redefinimos los vectores de fuerzas externas y de GDL
independientes, y utilizamos la ley de Hooke matricial.
{Q}=[Kq’]*{q}
Así:
r1= -0.266 PL2/EI
r2= 0
r3= 0.266 PL2/EI
Kresorte= 0.352 EI/L3
‘
‘

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 18
Ejercicio Nº3.
Para la estructura que se muestra a continuación, se sabe que EI = 1000 T*m2,
para el estado de cargas que se muestra se pide determinar los desplazamientos
en los nudos.
Solución:
a) Determinación de los grados de libertad de la estructura de acuerdo a las
condiciones de la estructura

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 19
a30
0
0.167
0.167
1
0
0
0
0.167
0.167
0
1
K 3( )
2666.667
1333.333
0
1333.333
2666.667
0
0
0
0
K 4( )
2666.667
1333.333
0
1333.333
2666.667
0
0
0
0
a50.167
0.167
0.167
0.167
1
0
0.167
0.167
0.167
0.167
0
1
K 5( )
942.809
471.405
0
471.405
942.809
0
0
0
0
a60.167
0.167
0.167
0.167
1
0
0.167
0.167
0.167
0.167
0
1
a40
0
0.167
0.167
1
0
0
0
0.167
0.167
0
1
K 6( )
942.809
471.405
0
471.405
942.809
0
0
0
0
a20.2
0.2
0
0
1
0
0.2
0.2
0
0
0
1
K 2( )
1600
800
0
800
1600
0
0
0
0
b) Determinación del sentido de análisis de la estructura y enumeración de
cada elemento de la estructura.
c) Matrices constitutivas de cada elemento.
a10.125
0.125
0
0
1
0
0.125
0.125
0
0
0
1
K 1( )
1000
500
0
500
1000
0
0
0
0

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 20
a
0
1
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
1
0
1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
6
1
6
1
6
1
6
1
6
1
6
0
0
0
0
0
0
0
0
1
6
1
6
0
0
1
6
1
6
0
0
1
5
1
5
0
0
0
0
1
6
1
6
1
6
1
6
1
8
1
8
0
0
0
0
0
0
1
6
1
6
1
6
1
6
k
1
0.5
0
0
0
0
0
0
0
0
0
0
0.5
1
0
0
0
0
0
0
0
0
0
0
0
0
8
5
4
5
0
0
0
0
0
0
0
0
0
0
4
5
8
5
0
0
0
0
0
0
0
0
0
0
0
0
8
3
4
3
0
0
0
0
0
0
0
0
0
0
4
3
8
3
0
0
0
0
0
0
0
0
0
0
0
0
8
3
4
3
0
0
0
0
0
0
0
0
0
0
4
3
8
3
0
0
0
0
0
0
0
0
0
0
0
0
4
3 2
2
3 2
0
0
0
0
0
0
0
0
0
0
2
3 2
4
3 2
0
0
0
0
0
0
0
0
0
0
0
0
4
3 2
2
3 2
0
0
0
0
0
0
0
0
0
0
2
3 2
4
3 2
1000
d) Matrices de acoplamiento.

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 21
KT
1 2 3 4 5 6 7 8 9 10 11
1
2
3
4
5
6
7
8
9
10
11
3666.667 1333.333 0 0 0 0 500 -666.667 0 0 187.5
1333.333 5333.333 1333.333 0 0 0 0 0 -666.667 0 0
0 1333.333 2666.667 0 0 0 0 666.667 -666.667 0 0
0 0 0 942.809 0 471.405 0 235.702 0 -235.702 235.702
0 0 0 0 942.809 471.405 0 0 -235.702 -235.702 235.702
0 0 0 471.405 471.405 3485.618 0 235.702 -235.702 8.595 471.405
500 0 0 0 0 0 1000 0 0 0 187.5
-666.667 0 666.667 235.702 0 235.702 0 523.012 -222.222 -78.567 78.567
0 -666.667 -666.667 0 -235.702 -235.702 0 -222.222 300.79 78.567 -78.567
0 0 0 -235.702 -235.702 8.595 0 -78.567 78.567 349.135 -157.135
187.5 0 0 235.702 235.702 471.405 187.5 78.567 -78.567 -157.135 204.01
T
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
1
1
0
0
0
0
0
0
0
0
0
0
1
1
Kq
3666.667
1333.333
0
0
0
0
500
666.667
187.5
1333.333
5333.333
1333.333
0
0
0
0
666.667
0
0
1333.333
2666.667
0
0
0
0
1333.333
0
0
0
0
942.809
0
471.405
0
471.405
0
0
0
0
0
942.809
471.405
0
471.405
0
0
0
0
471.405
471.405
3485.618
0
462.809
480
500
0
0
0
0
0
1000
0
187.5
666.667
666.667
1333.333
471.405
471.405
462.809
0
1931.65
192
187.5
0
0
0
0
480
187.5
192
238.875
e) Obtención de la matriz de rigidez referida a los todos los grados de libertad.
f) Ahora se debe determinar la matriz de compatibilidades geométricas para
los grados de libertad, las compatibilidades existentes en esta estructura
son del tipo: ( )
Luego la matriz de compatibilidades es de acuerdo a la expresión
{ r } = [ T ]*{ q }
g) La matriz de rigidez referida a los G.D.L.I es determinada de acuerdo a la
expresión
[ ] , - , - , -

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 22
h) Resolviendo el sistema [Kq]*{q}={Q}.
i) Esfuerzos.
q
1.467 103
4.19 104
1.469 103
2.195 103
2.195 103
7.748 103
8.304 103
3.357 103
0.04
r
1
1
2
3
4
5
6
7
8
9
10
11
-31.467·10
-4-4.19·10
-3-1.469·10
-32.195·10
-32.195·10
-3-7.748·10
-3-8.304·10
-33.357·10
-3-3.357·10
0.037
0.04
0.611
0
0
0.611
0
4.885
3.389
0
11.572
3.389
0
5.374
0
0.048
1.115
0
0.048
1.4
0
0.233
1.4
0
0.233
0
0.781
0.781
4.687
0.781
0.781
0
0.781
0.781
4.687
0.781
0.781
0

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 23
Ejercicio Nº4.
Para la estructura mostrada, se pide:
a) Encontrar el valor de N de modo que el desplazamiento vertical de la barra de rigidez 4EI no supere los 0,025 m.
b) Si la fuerza encontrada en a) aumentara en 20%, ¿en qué porcentaje variaría el desplazamiento de la barra EI?
Desarrollo.
i) Grados de libertad / enumeración de barras.
=>
EI= 1250 T*m2
AE= 10000 T
*Todo en metros
r2
r3
r5
r1
r6
r4
r8
r7
1
3
2
3
4EI
2AE
AE
2EI
2
2.5
2
4
20 T*m
N
120º
GDL= 8
4 Compatibilidades.
GDLI= 4

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 24
ii) Compatibilidades geométricas y matriz de transformación.
Para la primera sección de la barra rígida inclinada.
2cos(60)*r1= r7 – r6
r1= r7 – r6 => r6 = r7 – r1 (*)
2sen(60)*r1 = r3 – r4
√ r1 = r3 – r4 => r4 = r3 - √ r1 (**)
Segunda sección de la barra rígida.
2.5cos(60)*r1 = r8 – r7
*r1 = r8 – r7 => r7 = r8 -
*r1 (***)
2.5sen(60)*r1 = r4
√
*r1 = r4 (****)
Reemplazando (***) en (*) y desarrollando:
r6 = r8 -
*r1
Reemplazando (****) en (**) y desarrollando:
r3 = √
*r1
Así las compatibilidades son:
r3 = √
*r1
r4 = √
*r1
r6 = r8 -
*r1
r7 = r8 -
*r1

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 25
T
1
0
93
4
53
4
0
9
4
5
4
0
0
1
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
1
1
1
T
1
0
3.897
2.165
0
2.25
1.25
0
0
1
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
1
1
1
a1
0 1 0 1 0 0( )
a
0
0
1
0
1
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0.108
0.108
0.5
0
0
0
0.108
0.108
0.5
0
0
1
0
0
0
0
0
0
0.062
0.062
0.866
0
0
0
0
0
0
0.333
0.333
iii) Matriz de compatibilidad geométrica [a].
Por barra.
Para la Estructura.
u1a v1a ϕ1a u1b v1b ϕ1b
u2a v2a ϕ2a u2b v2b ϕ2b
u3a v3a ϕ3a u3b v3b ϕ3b
a2
0.108
0.108
0.5
0.062
0.062
0.866
1
0
0
0.108
0.108
0.5
0.062
0.062
0.866
0
1
0
a3
0
0
1
3
1
3
1
0
0
0
1
3
1
3
0
1
δ1
ϴ2a
δ2
ϴ2b
ϴ3b
ϴ3a
r1 r2 r3 r4 r5 r6 r7 r8
δ1
ϴ1a
δ2
ϴ1b
ϴ3a
ϴ3b
r1 r2 r5 r8
r5 r6

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 26
k1
AE( ) k1
10000( )
k2
42 EI( )
8
22EI( )
8
0
22EI( )
8
42EI( )
8
0
0
0
AE
8
k
2
1250
625
0
625
1250
0
0
0
1250
k3
44EI( )
3
24EI( )
3
24EI( )
3
44EI( )
3
k3
6666.667
3333.333
3333.333
6666.667
iv) Matriz de rigidez asociada a las deformaciones ϴa, ϴb, y δ.
Por elemento.
Para la estructura.
v) Matriz de rigidez asociada a todos los GDL.
KT=aT·k·a
k
10000
0
0
0
0
0
0
1250
625
0
0
0
0
625
1250
0
0
0
0
0
0
1250
0
0
0
0
0
0
6666.667
3333.333
0
0
0
0
3333.333
6666.667
δ1
δ2
ϴ2b
ϴ2a
ϴ3b
ϴ3a
δ1
ϴ1a
δ2
ϴ1b
ϴ3a
ϴ3b
r1 r2 r3 r4 r5 r6 r7 r8
KT
7916.667
625
0
202.975
202.975
0
117.187
3333.333
625
1250
0
202.975
202.975
0
117.187
0
0
0
0
0
0
0
0
0
202.975
202.975
0
356.445
356.445
0
515.894
0
202.975
202.975
0
356.445
356.445
0
515.894
0
0
0
0
0
0
10000
0
0
117.187
117.187
0
515.894
515.894
0
952.148
0
3333.333
0
0
0
0
0
0
2222.222
Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 27
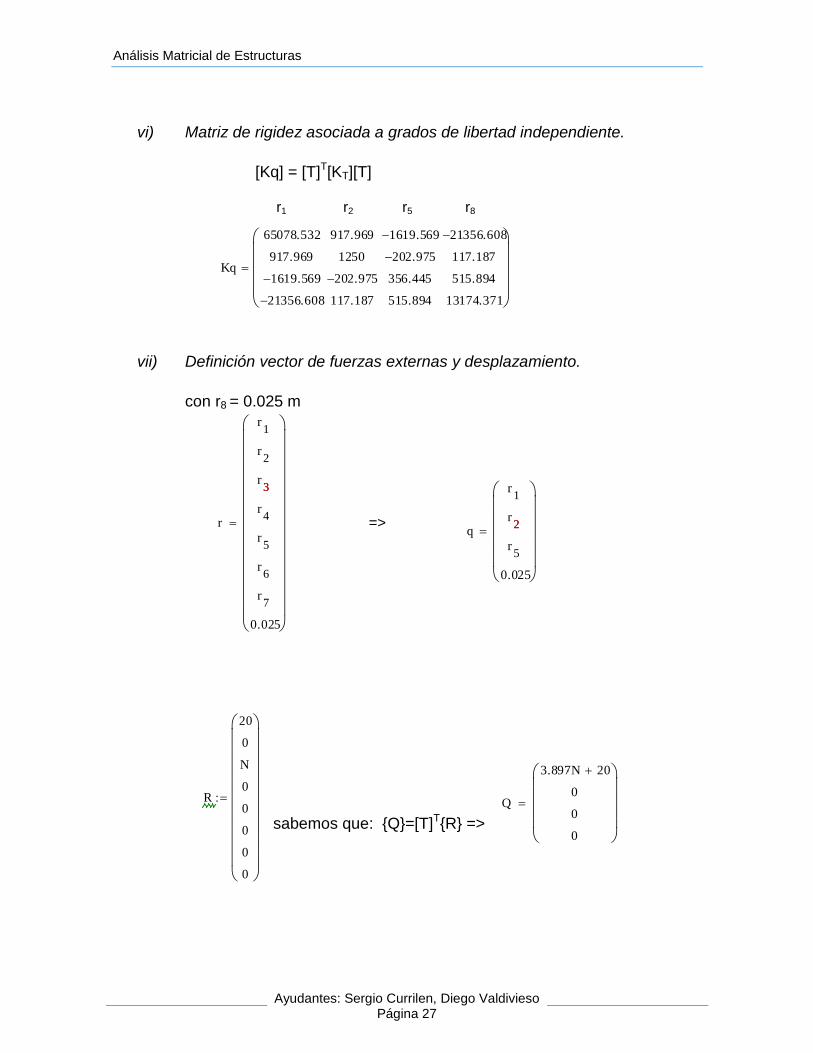
r
r1
r2
r3
r4
r5
r6
r7
0.025
3
q
r1
r2
r5
0.025
2
Q
3.897N 20
0
0
0
R
20
0
N
0
0
0
0
0
Kq
65078.532
917.969
1619.569
21356.608
917.969
1250
202.975
117.187
1619.569
202.975
356.445
515.894
21356.608
117.187
515.894
13174.371
vi) Matriz de rigidez asociada a grados de libertad independiente.
[Kq] = [T]T[KT][T]
vii) Definición vector de fuerzas externas y desplazamiento.
con r8 = 0.025 m
sabemos que: {Q}=[T]T{R} =>
=>
r1 r2 r5 r8

Análisis Matricial de Estructuras
Ayudantes: Sergio Currilen, Diego Valdivieso Página 28
Q
3.897N 20
0
0
0
q
r1
r2
r5
r8
2
viii) Ley de Hooke matricial.
Aplicando {Q} = [Kq]*{q}
Obtenemos:
r1= 0.0161 rad
r2= -0.0089 rad
r5= 0.0321 m
N= 112.063 Ton [Respuesta a)]
ix) Si la fuerza aumenta en un 20%:
N’= 1.2*112.063 => N’=134.476 ton
Variamos el vector de fuerzas externas, reemplazando el valor de N:
=>
y nuestra nueva incógnita es ahora r8:
entonces:
realizando nuevamente la relación de Hooke, obtenemos el valor pedido:
r1 = 0.0192 rad
r2 = -0.0107 rad
r5 = 0.0382 m
r8’ =0.0298 m ( nuevo valor del desplazamiento)
En porcentaje tenemos: X = r8’/ r8 = 0.0298/0.025
X=1.192
Respuesta b): El desplazamiento aumentó en un 19.2 %.
Q
544.052972
0
0
0
‘


















