
INFORME N°1.docx
23
Física II UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica 1 Péndulo físico y teorema de steiner. TEMA: Primer Laboratorio Nº DE LABORATORIO: DE LA VEGA DE LA ROSA, Jair 20140537A GIRALDO SARMIENTO, Andrés 20154159D INTEGRANTES: Ing. VASQUEZ ALVA, Darío PROFESOR 31 de Agosto del 2015 FECHA DE EJECUCION 07 de Septiembre del 2015 FECHA DE ENTREGA
-
Upload
andres-giraldo-sarmiento -
Category
Documents
-
view
14 -
download
1
description
Informe de física 2 UNI
Transcript of INFORME N°1.docx

Física II
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
1
Péndulo físico y teorema de steiner.
TEMA:
Primer Laboratorio
Nº DE LABORATORIO:
DE LA VEGA DE LA ROSA, Jair 20140537A GIRALDO SARMIENTO, Andrés 20154159D
INTEGRANTES:
Ing. VASQUEZ ALVA, Darío
PROFESOR
31 de Agosto del 2015
FECHA DE EJECUCION
07 de Septiembre del 2015
FECHA DE ENTREGA

INDICE
1. Objetivos…………………………………….……………………Pág.
2. Fundamento Teórico……………………………………………Pág.
3. Procedimiento…………………………………………………...Pág.
4. Cálculos y Resultados…………………………….……………Pág.
5. Conclusiones…………………….………………………….….. Pág.
6. Bibliografía………………………………………………………. Pág.
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
2

Péndulo físico y teorema de Steiner
I.OBJETIVOS:
Comprobar experimentalmente las leyes del péndulo físico constituido por una barra metálica, midiendo el periodo de oscilación del mismo, para varias posiciones del centro de oscilación.
Hallar la variación del T (periodo), respecto a la longitud entre el C.G, y el eje en que oscila.
Determinar el tipo de movimiento respecto al ángulo de giro de la barra metálica.
Saber el procedimiento del cálculo de momento de inercia para cuerpos con geometría desconocida.
II. FUNDAMENTO TEÓRICO:
Péndulo Físico:
Se llama péndulo físico a aquel cuerpo rígido capaz de pivotar a través de un eje horizontal fijo; como se muestra en la figura (a), este al ser desplazado de su posición de equilibrio, figura (b), aparece un torque ejercido por la fuerza de gravedad teniendo como línea de acción al eje horizontal en el que se suspende el cuerpo rígido y con dirección contraria al desplazamiento angular θ, y de esta forma llevar al cuerpo rígido a su posición de equilibrio, posición que no logra obtener debido a la inercia del cuerpo rígido, llevándola así a una nueva posición, donde nuevamente aparece un torque recuperador repitiéndose este movimiento oscilatorio.
En el péndulo simple se cumple las siguientes relaciones (demostradas en el punto 8 de cálculos y resultados):
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
3
T=2π √ Imgl
IO=IG+m l2
IG=m(a2+b2)
12

Donde:
T: periodo.
Io: momento de inercia respecto al eje.
IG: momento de inercia con respecto al centro de gravedad (cte).
m: masa
l: longitud del centro de gravedad al eje que pasa por O.
l1: longitud del centro de gravedad a cada # de hueco.
b: longitud de la barra(constante).
a: ancho de la barra(constante).
Momento de Inercia:Dado un eje arbitrario, para un sistema de partículas se define como la suma de los productos entre las masas de las partículas que componen un sistema, y el cuadrado de las distancia ‘r’ de cas partícula al eje escogido. Representa la inercia de un cuerpo a rotar. Matemáticamente se expresa como:
Para un cuerpo de masa continua (medio continua) lo anterior se generaliza como:
El subíndice V de la integral indica que hay integrar sobre todo el volumen del cuerpo. Este concepto desempeña en el movimiento de rotación un papel análogo al de masa inercial en el caso del movimiento rectilíneo y uniforme (la masa es la resistencia que presenta un cuerpo a ser acelerado en traslación y el momento de inercia es la resistencia que presenta un cuerpo a ser acelerado en rotación.
III. EQUIPOS Y MATERIALES:
Una barra metálica de longitud L con agujeros circulares. Un soporte de madera con cuchilla Dos mordazas simples Un cronometro digital Una regla milimetrada Una rueda de maxwell
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
4
I=∑mi ri2
I=∫❑
❑
r2 dm=∫❑
❑
ρ r2 dV
IV.PROCEDIMIENTO EXPERIMENTAL Y DATOS OBTENIDOS:
a) Sobre la mesa y apoyado sobre su base mayor, sujete el soporte de madera con las mordazas simples
b) Hallar el centro de masa de la barra suspendiéndola horizontalmente en la cuchilla( el punto de apoyo de la barra en equilibrio será su centro de gravedad CG)
c) Ahora suspenderla verticalmente por 10 de los 21 huecos en la cuchilla y hacerla oscilar separándola ligeramente de su posición de equilibrio(<15°)
d) Hacer 20 oscilaciones para los 7 primeros huecos y para 10 para los 3 que están más cercanos al CG.
e) Anotar el tiempo para luego hallar el periodo (T) y también medir las distancias (L) del eje de oscilación hacia el CG.
V.CALCULOS Y RESULTADOS:
1.- TABLA 1:
# De hueco
l(cm) t1(s) t2(s) t3(s) # de oscilaciones Periodo T (promedio)
1 51 32.58 33.31 33.2 20 1.6515
2 46 32.52 32.66 32.83 20 1.6335
3 41 31.25 32.18 32.32 20 1.5958
4 36 30.88 31.82 31.48 20 1.5697
5 31 31.18 31.18 31.56 20 1.5653
6 26 31.11 31.78 31.82 20 1.5785
7 21 31.56 32.76 32.98 20 1.6217
8 16 17.61 17.59 17.173 10 1.7458
9 11 20.48 30.16 20.33 10 2.3657
10 6 25.1 26.56 26.34 10 2.6000
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
5

2.-
a) Gráfica T vs L.
De la gráfica encontramos el valor de L mínimo como ya conocemos la función por la cual se rige que es una especie de parábola, entonces hallamos la primera derivada la igualamos a ‘0’, así obtenemos el mínimo relativo:
∂(0.0012 x2−0.0869 x+3.0325)∂ x
=0
2 (0.0012x )−0.0869=0
x=l=36.208333 cm
3. TABLA 2:
# De hueco
Eje de oscilación L (cm)
(Periodo)2 T2
(s2)Momento de Inercia I1 L2 (cm)2
1 51 2.727 0.639974 2601
2 46 2.668 0.564718 2116
3 41 2.547 0.480390 1681
4 36 2.464 0.408087 1296
5 31 2.450 0.349470 961
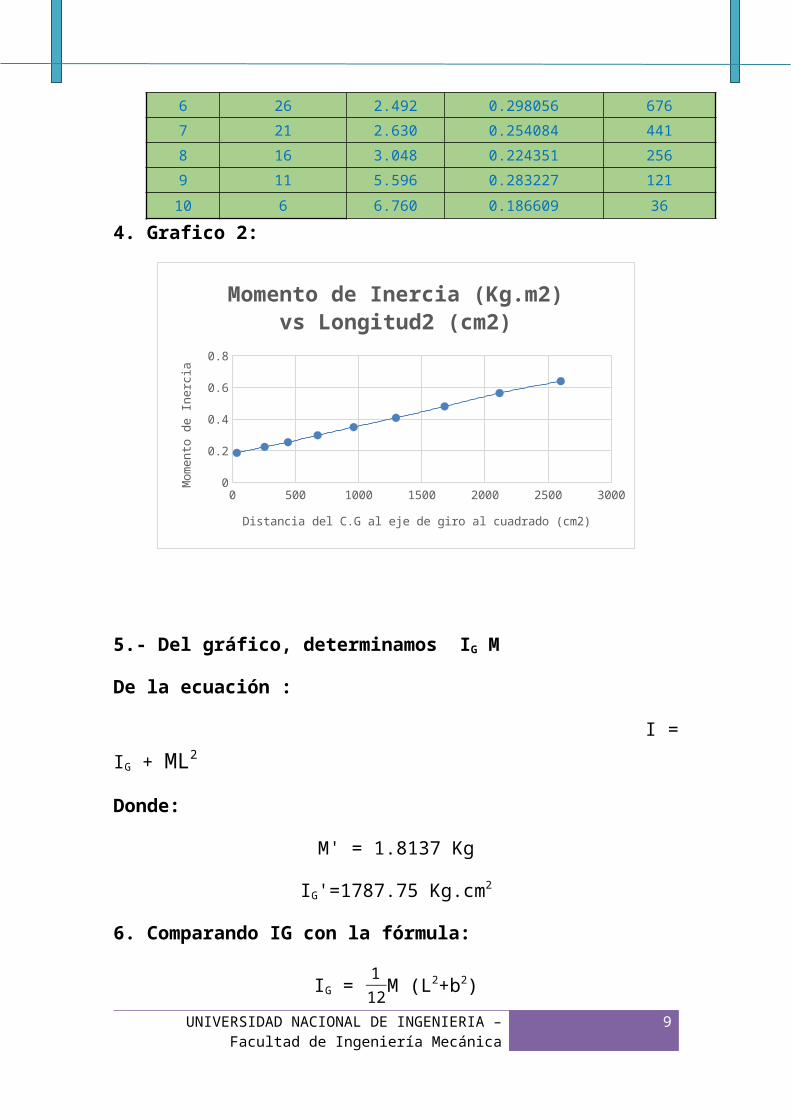
6 26 2.492 0.298056 676
7 21 2.630 0.254084 441
8 16 3.048 0.224351 256
9 11 5.596 0.283227 121
10 6 6.760 0.186609 36
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
6
0 10 20 30 40 50 600.0000
0.5000
1.0000
1.5000
2.0000
2.5000
3.0000
f(x) = 0.00121460606060606 x² − 0.0869058787878789 x + 3.03248460606061
Periodo(s) vs Longitud(cm)
Distancia del C.G al eje de giro (cm)
Perio
do (s
)

4. Grafico 2:
5.- Del gráfico, determinamos IG M
De la ecuación :
I = IG + ML2
Donde:
M' = 1.8137 Kg
IG'=1787.75 Kg.cm2
6. Comparando IG con la fórmula:
IG = 1
12M (L2+b2)
b=3.375 cm
L =110 cm
M =1.814 Kg
Entonces:
IG = 1868.59 Kg.cm2
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
7
0 500 1000 1500 2000 2500 30000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Momento de Inercia (Kg.m2) vs Longitud2 (cm2)
Distancia del C.G al eje de giro al cuadrado (cm2)
Mom
ento
de
Iner
cia

¿Qué error experimental se obtuvo?
% ERROR IG =1868.59−1787.75
1868.59 X 100 %
C 4.3263%
Esto se debe a que la barra tiene agujeros lo cual disminuye su Momento de Inercia experimental.
¿Qué puede decir acerca de la masa?
% ERROR M = 1.814−1.1837
1.814 X 100%
≈ 0.016%
También vemos que la masa es ligeramente menor a la teórica, todo es debido a los 21 agujeros que presenta nuestro cuerpo rígido.
7. En este caso hallaremos el equivalente al péndulo simple del agujero # 4.
T4 = 2π √ L ' 'g
T4 =1.5697 s
g =9.81 m/s2
Entonces: L ' ' = 61.227cm
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
8
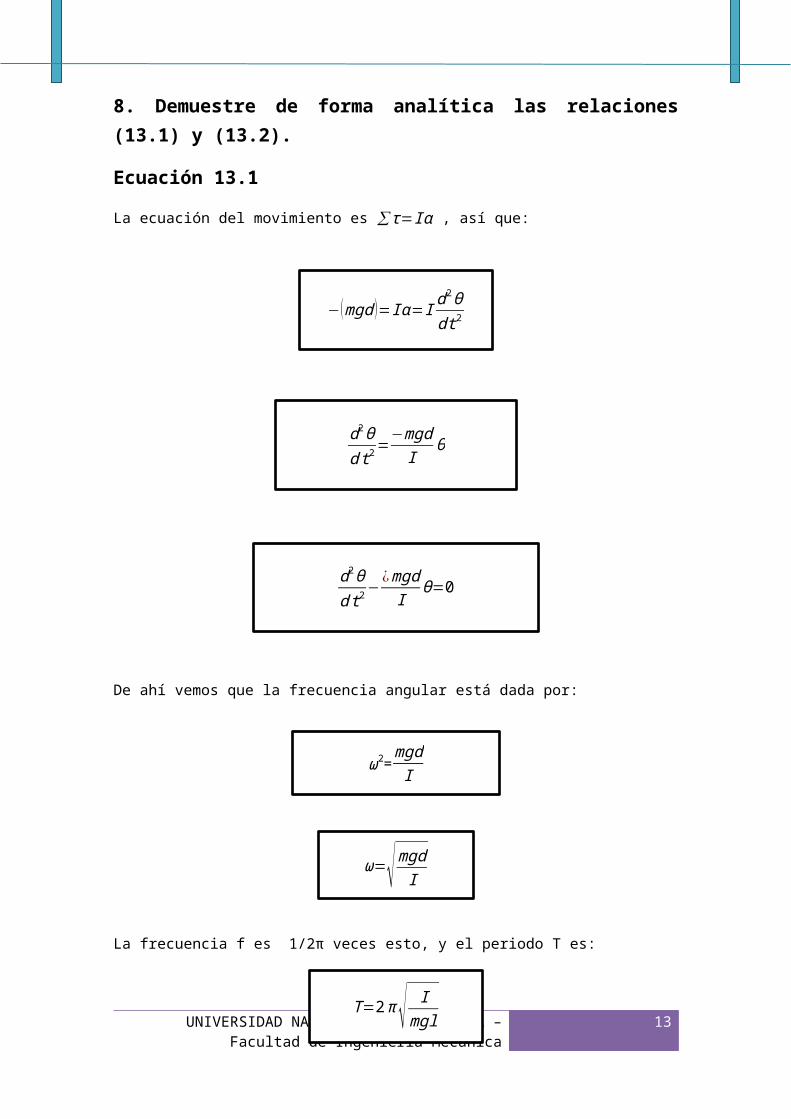
8. Demuestre de forma analítica las relaciones (13.1) y (13.2).
Ecuación 13.1
La ecuación del movimiento es ∑ τ=Iα , así que:
De ahí vemos que la frecuencia angular está dada por:
La frecuencia f es 1/2π veces esto, y el periodo T es:
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
9
T=2π √ Ιmgl
ω=√ mgdΙ
ω2=mgdΙ
d2θd t2 −¿mgd
Iθ=0
d2θd t2 =−mgd
Iθ
−(mgd )=Iα=Id2 θdt2

Ecuación 13.2:
El momento de inercia para un sistema de n partículas con respecto de un eje de giro es
Si el cuerpo es tal que su masa está distribuida en forma continua, subdividimos su masa en elementos infinitesimales dm ubicados a una distancia r del eje de rotación .esto significa que el momento de inercia está dado por:
En el diagrama que se presenta a continuación, se da a conocer la ubicación del elemento de masa dm, su ubicación relativa a los ejes (ubicados en el centro de masa y en P, respectivamente).
El lector se da cuenta de forma inmediata que la separación entre los ejes es constante, en este caso se simboliza con la letra a:
La figura representa un cuerpo continuo ubicado en el plano de la hoja ,donde el eje z pasa por el centro de masa del cuerpo .esto significa que las coordenadas del centro de masa son dadas por:
Las coordenadas del elemento de masa dm son:
Las coordenadas del punto P son:
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de
Ingeniería Mecánica10
X=a y=0 z=0
X=r cosθ y=rsenθ z=0
xcm =0 ycm=0 zcm=0
Ι=∫r2dm
Ι=∑i=1
n
mi ri2

Por P pasa otro eje de giro perpendicular a la hoja y paralelo al eje Z. El trazo CP =a. El momento de inercia del cuerpo con respecto al eje Z que pasa por el centro de masa es:
El momento de inercia del cuerpo con respecto de un eje que pasa por P y que es paralelo al eje z del centro de masa es:
De la figura y aplicando el teorema del coseno para un triángulo, que relaciona las dimensiones de dos de sus lados y el ángulo comprendido entre ellos, se obtiene:
De manera que:
Dado que a =constante, tenemos:
Por otro lado sabemos que por definición de coordenadas del centro de masa:
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
11
xcm =∫ xdm
M donde M =∫ dm
Ι p = ∫R2dm+a2∫dm−2a∫ x2 dm=Ι cm+a2∫ dm−2a∫ x2dm
Ι p=∫R2 dm+∫ a2 dm−2∫ a x2 dm
Ι p=∫r2 dm=∫(R2+a2−2ax )2dm
r2=R2+a2−2aR cos θ=R2+a2−2aα
Ι p=∫r2 dm
Ι cm=∫r 2dm

Acomodando la ecuación:
Y puesto que hemos dicho que el centro de masa tiene coordenada.
Tenemos:
De manera que:
Con la Rueda de Maxwell:
Datos:
M=441g L=4.9cm
M: Masa L: Distancia al eje de giro.
# De Prueba # de Oscilaciones
t(s) Periodo T (s)
1 10 12.27 1.2272 10 12.71 1.2713 10 12.43 1.243 Promedio: 1.247
Para calcular el momento de inercia de la rueda respecto de su centro de masa utilizaremos:
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
12
Ι p=Ι cm +a2 M
X cm=0
∫ xdm=0
∫ xdm=M X cm
T=2π √ Ιmgl
Remplazando:
1.247=2π √ Ι0.441∗9.81∗0.049
I=8.3498∗10−3Kg.m2
Del teorema de Steiner:
8.3498∗10−3=IC .G+0.441∗0.0492
IC .G=7.29097∗10−3Kg.m2
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
13
IO=IG+m l2

OBSERVACIONES:
Los resultados presentados en este ensayo fueron elaborados con el mayor cuidado posible pues se intentó reducir la mayor cantidad de variaciones en el laboratorio.
Tener distintos ángulos iniciales de oscilación, para evitar ello se usó un transportador, de modo que se puede tener un mayor control sobre los ángulos iniciales antes de iniciar la oscilación. en nuestra experiencia se trató de tener, para todas nuestras pruebas, un Angulo aproximado de 15°.
Considerar a la barra tal y como se está usando en el laboratorio, en nuestro caso la barra contaba con 21 agujeros. Esto nos permitió tener valores teóricos muy cercanos a los experimentales.
Existen ciertas variables que difícilmente se pueden controlar, como por ejemplo la fricción entre el eje de rotación y la barra, resistencia del aire, temperatura, malas mediciones, aparatos deficientes, etc.
CONCLUSIONES :
Este ensayo nos muestra el comportamiento del péndulo físico cada vez que varía la distancia del C.G al eje de giro. Podemos ver según las gráficas que mientras el centro de giro se acerque al C.G el periodo tiende a aumentar, sin embargo también mientras la distancia supera cierto periodo mínimo el periodo aumentara mientras también la longitud de C.G a eje de giro aumente.
La facilidad de poder hallar momentos de inercia usando la teoría del péndulo físico es de gran importancia pues ya no es necesario tener en cuenta la geometría exacta del objeto.
Un péndulo físico puede ser equivalente a un péndulo simple con una cierta longitud y un cierto periodo experimental
RECOMENDACIONES:
Tener presente la mayor cantidad posible de variaciones que puedan afectar el ensayo e intentar homogenizar las pruebas para tener menos error.
Probar el funcionamiento correcto de los instrumentos a utilizar antes de empezar el laboratorio.
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
14

Bibliografía:
COLES METER Einstein y el nacimiento de la gran ciencia, Editorial GEDISA
2005.
HALLIDAY, David y RESNICK, Robert .Física .Parte 2 .Editorial CESCA. México,
1974.
SERWAY. Física .Tomo II EDITORIAL McGraw Hill .Tercera Edición. México,
1993.
FIGUEROA, Douglas. Física. Sistema de partículas .Unidad 3 .Editorial
Italgrafica Caracas, 1995.
UNIVERSIDAD NACIONAL DE INGENIERIA – Facultad de Ingeniería Mecánica
15


















