
Instrucciones de instalación de servomotores de servicio ...
30
Installation Instructions Traducción de las instrucciones originales Servomotores de servicio continuo Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm Números de catálogo VPC-B1652A, VPC-B1653A, VPC-B1652D, VPC-B1653D, VPC-B1654D, VPC-B21539, VPC-B21549, VPC-B2153A, VPC-B2154A, VPC-B2154B, VPC-B2154D, VPC-B2155B, VPC-B2155D, VPC-B2156A, VPC-B2156D, VPC-B30029, VPC-B30039, VPC-B30049, VPC-B3002A, VPC-B3003A, VPC-B3004A, VPC-B3004B, VPC-B3004D Resumen de cambios Esta publicación contiene información nueva y actualizada según se describe en la tabla siguiente. Tema Página Resumen de cambios 1 Acerca de los motores de servicio continuo Kinetix VPC 2 Explicación de los números de catálogo 2 Antes de instalar el motor 3 Seguridad funcional 5 Instalación del motor 6 Dimensiones de los motores VPC-B165xx, VPC-B215xx y VPC-B300xx (un solo conector) 9 Dimensiones de los motores VPC-B165xx, VPC-B215xx y VPC-B300xx (conectores de alimentación de motor/retroalimentación) 11 Datos de los conectores 14 Clasificaciones de fuerza de carga del motor 15 Especificaciones ambientales 28 Cables de motor serie 2090 28 Kits de sellos de eje 28 Recursos adicionales 29 Tema Página Se ha añadido el motor Kinetix VPC sin ventilador (opción A) a los números de catálogo y dimensiones existentes. 2, 9…13 Se han añadido los números de catálogo VPC-B2154B, VPC-B2155B, VPC-B2156A y VPC-B3004B (motores sin opción de ventilador). Se han añadido los servomotores VPC-B3004x-M con encoders absolutos de múltiples vueltas (protocolo Hiperface). 2 Se han añadido las instrucciones de elevación. 3 Se ha actualizado la información de certificación de seguridad funcional. 5
Transcript of Instrucciones de instalación de servomotores de servicio ...
Installation Instructions
Traducción de las instrucciones originales
Servomotores de servicio continuo Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mmNúmeros de catálogo VPC-B1652A, VPC-B1653A, VPC-B1652D, VPC-B1653D, VPC-B1654D, VPC-B21539, VPC-B21549, VPC-B2153A,VPC-B2154A, VPC-B2154B, VPC-B2154D, VPC-B2155B, VPC-B2155D, VPC-B2156A, VPC-B2156D, VPC-B30029, VPC-B30039, VPC-B30049, VPC-B3002A, VPC-B3003A, VPC-B3004A, VPC-B3004B, VPC-B3004D
Resumen de cambiosEsta publicación contiene información nueva y actualizada según se describe en la tabla siguiente.
Tema Página
Resumen de cambios 1
Acerca de los motores de servicio continuo Kinetix VPC 2
Explicación de los números de catálogo 2
Antes de instalar el motor 3
Seguridad funcional 5
Instalación del motor 6
Dimensiones de los motores VPC-B165xx, VPC-B215xx y VPC-B300xx (un solo conector) 9
Dimensiones de los motores VPC-B165xx, VPC-B215xx y VPC-B300xx (conectores de alimentación de motor/retroalimentación) 11
Datos de los conectores 14
Clasificaciones de fuerza de carga del motor 15
Especificaciones ambientales 28
Cables de motor serie 2090 28
Kits de sellos de eje 28
Recursos adicionales 29
Tema Página
Se ha añadido el motor Kinetix VPC sin ventilador (opción A) a los números de catálogo y dimensiones existentes.2, 9…13
Se han añadido los números de catálogo VPC-B2154B, VPC-B2155B, VPC-B2156A y VPC-B3004B (motores sin opción de ventilador).
Se han añadido los servomotores VPC-B3004x-M con encoders absolutos de múltiples vueltas (protocolo Hiperface). 2
Se han añadido las instrucciones de elevación. 3
Se ha actualizado la información de certificación de seguridad funcional. 5
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Acerca de los motores de servicio continuo Kinetix VPCLos servomotores Kinetix® VPC cuentan con encoders absolutos de alta resolución de una vuelta y de múltiples vueltas, y están disponibles con y sin frenos de 24 VCC. Estos servomotores compactos sin escobillas cumplen con los exigentes requisitos de los sistemas de control de movimiento de alto rendimiento.
Usted es responsable de inspeccionar el equipo antes de aceptar el envío de la empresa transportista. Verifique los artículos recibidos con la orden de compra a la vista. Notifique inmediatamente al transportista sobre cualquier daño o artículo faltante. Almacene y haga funcionar el motor en un lugar limpio y seco que esté dentro de las Especificaciones ambientales en la página 28.
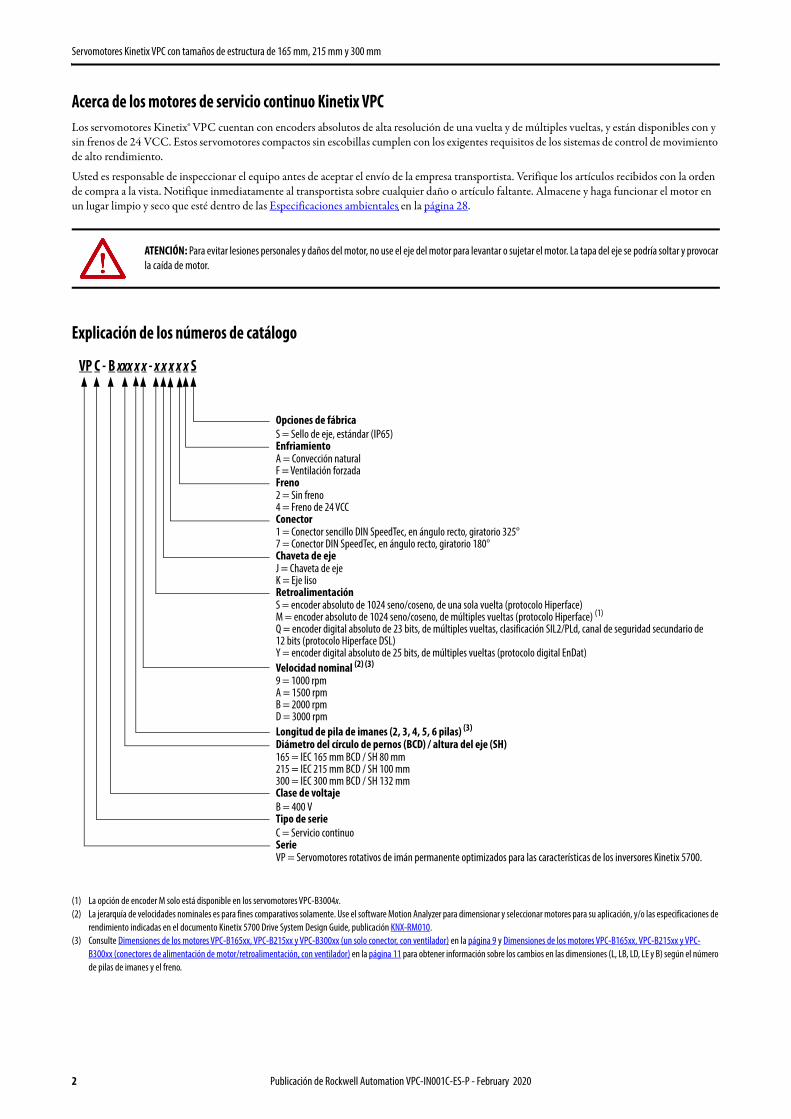
Explicación de los números de catálogo
(1) La opción de encoder M solo está disponible en los servomotores VPC-B3004x.(2) La jerarquía de velocidades nominales es para fines comparativos solamente. Use el software Motion Analyzer para dimensionar y seleccionar motores para su aplicación, y/o las especificaciones de
rendimiento indicadas en el documento Kinetix 5700 Drive System Design Guide, publicación KNX-RM010.(3) Consulte Dimensiones de los motores VPC-B165xx, VPC-B215xx y VPC-B300xx (un solo conector, con ventilador) en la página 9 y Dimensiones de los motores VPC-B165xx, VPC-B215xx y VPC-
B300xx (conectores de alimentación de motor/retroalimentación, con ventilador) en la página 11 para obtener información sobre los cambios en las dimensiones (L, LB, LD, LE y B) según el número de pilas de imanes y el freno.
ATENCIÓN: Para evitar lesiones personales y daños del motor, no use el eje del motor para levantar o sujetar el motor. La tapa del eje se podría soltar y provocar la caída de motor.
Opciones de fábricaS = Sello de eje, estándar (IP65)EnfriamientoA = Convección naturalF = Ventilación forzadaFreno2 = Sin freno4 = Freno de 24 VCCConector1 = Conector sencillo DIN SpeedTec, en ángulo recto, giratorio 325°7 = Conector DIN SpeedTec, en ángulo recto, giratorio 180°Chaveta de ejeJ = Chaveta de ejeK = Eje lisoRetroalimentaciónS = encoder absoluto de 1024 seno/coseno, de una sola vuelta (protocolo Hiperface) M = encoder absoluto de 1024 seno/coseno, de múltiples vueltas (protocolo Hiperface) (1)
Q = encoder digital absoluto de 23 bits, de múltiples vueltas, clasificación SIL2/PLd, canal de seguridad secundario de 12 bits (protocolo Hiperface DSL)Y = encoder digital absoluto de 25 bits, de múltiples vueltas (protocolo digital EnDat)Velocidad nominal (2) (3)
9 = 1000 rpmA = 1500 rpmB = 2000 rpmD = 3000 rpmLongitud de pila de imanes (2, 3, 4, 5, 6 pilas) (3)
Diámetro del círculo de pernos (BCD) / altura del eje (SH)165 = IEC 165 mm BCD / SH 80 mm215 = IEC 215 mm BCD / SH 100 mm300 = IEC 300 mm BCD / SH 132 mmClase de voltajeB = 400 V Tipo de serieC = Servicio continuoSerieVP = Servomotores rotativos de imán permanente optimizados para las características de los inversores Kinetix 5700.
VP C - B xxx x x - x x x x x S
2 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Antes de instalar el motorRealice estos pasos de inspección y revise las pautas en torno a los sellos de eje, acoplamientos y poleas, así como las pautas de prevención de ruido eléctrico.
1. Saque con cuidado el motor de su embalaje.
2. Inspeccione el motor para determinar si presenta algún daño.
3. Examine la estructura del motor, el eje de salida frontal y el piloto de montaje en busca de defectos.
4. Notifique inmediatamente al transportista sobre cualquier daño.
Retire la tapa del ejeQuite manualmente la tapa protectora instalada en el eje del motor o use un destornillador para quitar la tapa. No use un martillo ni otras herramientas que puedan dañar el eje del motor.
Instrucciones de elevaciónSe recomiendan un elevador, cintas y ganchos en forma de J con un seguro enclavable capaz de soportar el peso máximo del motor.
Lea estas precauciones antes de intentar elevar la fuente de alimentación de bus regenerativa.
El ángulo de elevación formado por la cadena o cuerda de elevación deberá ser superior a 45° respecto a la horizontal. La figura siguiente indica las prácticas adecuadas de colocación de aparejos y elevación.
Pautas de elevación
Para condiciones poco habituales, como el montaje en una pared lateral o en el techo de motores horizontales y la instalación de motores verticales enviados en posición horizontal, deberán adoptarse precauciones especiales. Recomendamos recurrir a los servicios de un experto en aparejos.
ATENCIÓN: Aparte de cambiar la orientación del conector como se describe en la página 6, no intente abrir ni modificar el motor. Solo un empleado de Rockwell Automation debidamente calificado puede darle servicio a este motor.
ATENCIÓN: Todo el equipo y las piezas de sujeción utilizados para elevar el motor deben tener las capacidades y clasificaciones adecuadas para elevar y soportar de manera segura el peso del motor. Para evitar la posibilidad de lesiones personales o daños al equipo:
• Inspeccione que todas las piezas se han instalado correctamente y realice la elevación utilizando todos los pernos de argolla u orejetas para izado suministrados.
• Los pernos de argolla pueden desenroscarse durante la elevación. Antes de comenzar la elevación, compruebe que los pernos de argolla estén bien sujetos. Acople el equipo de elevación para restringir los giros durante la elevación. También puede elevar la unidad sobre una plataforma o con una eslinga.
• Los pernos de argolla u orejetas de izado están concebidos únicamente para la elevación del motor y de los accesorios montados en la fábrica. No monte ningún equipo adicional antes de elevar y asegurar el motor.
• No monte ningún equipo adicional antes de elevar y asegurar el motor.• No permita que ninguna parte del motor ni del equipo de elevación hagan contacto con conductores o componentes cargados eléctricamente.• No someta el motor a elevadas velocidades de aceleración, desaceleración o fuerzas de choque que puedan causar movimientos bruscos de subida, bajada,
balanceo o giro de un motor suspendido durante una elevación.• Evite que el personal o cualquiera de sus extremidades quede directamente debajo del motor durante su elevación.
>1/2 A
A
45°
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 3
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Cómo prolongar la vida útil del motorUn diseño y un mantenimiento correctos pueden aumentar la vida útil de un servomotor. Siga estas pautas para maximizar la vida útil de un servomotor que funcione dentro de las Especificaciones ambientales en la página 28:
• Siempre proporcione un bucle de goteo para los cables del motor a fin de alejar los líquidos de la conexión del motor.• Siempre que sea posible, proporcione blindajes que protejan el envolvente del motor, el eje, los sellos y sus uniones contra la
contaminación proveniente de materias extrañas o líquidos.• Los sellos de eje están expuestos a desgaste, y requieren inspección y reemplazo periódicos. Se recomienda reemplazarlos cada 3 meses, o
como máximo cada 12 meses, según el uso. Consulte Kits de sellos de eje en la página 28 para obtener más información.• Inspeccione a intervalos regulares el motor y los sellos en busca de daños o desgaste. Si detecta un daño o un desgaste excesivo, reemplace
el elemento.
Sellos de ejeEl motor viene equipado en su versión estándar con un sello de eje. Se requiere un sello de eje en el eje del motor cerca de su cojinete frontal si el eje está expuesto a cantidades considerables de polvo fino o a fluidos tales como aceite lubricante de una caja de engranajes.
Una clasificación IP65 para el motor requiere un sello de eje, además de conectores y cables a prueba de factores ambientales.
• Consulte en Especificaciones ambientales en la página 28 una breve descripción de la clasificación IP para estos motores.• Consulte en Kits de sellos de eje en la página 28 la información sobre los kits de sellos compatibles con el motor.• Consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001, para encontrar conectores y
cables a prueba de factores ambientales compatibles con estos motores.
Acoplamientos y poleasLas conexiones mecánicas al eje del motor, tales como acoplamientos y poleas, requieren un acoplamiento rígido que resista la torsión o una correa de distribución reforzada. El rendimiento de alta dinámica de los servomotores puede hacer que los acoplamientos, poleas o correas se aflojen o presenten deslizamiento con el tiempo. Una conexión floja o con deslizamiento causa inestabilidad en el sistema y puede dañar el eje del motor. Todas las conexiones entre el sistema y el eje del servomotor deben ser rígidas para lograr una respuesta aceptable del sistema. Inspeccione periódicamente las conexiones para verificar su rigidez.
Al montar los acoplamientos o poleas en el eje del motor, verifique que las conexiones estén debidamente alineadas, y que las cargas axiales y radiales estén dentro de las especificaciones del motor. Consulte en Clasificaciones de fuerza de carga del motor en la página 15 las pautas para lograr 20,000 horas de vida útil de los cojinetes del motor o en la página 22 las pautas para lograr 40,000 horas de vida útil de los cojinetes del motor.
Cómo evitar el ruido eléctricoLa interferencia electromagnética (EMI), comúnmente llamada ruido eléctrico, puede reducir el rendimiento del motor. Algunas técnicas eficaces para contrarrestar la interferencia electromagnética incluyen filtrar la alimentación de CA, usar cables blindados, separar los cables de señales del cableado de alimentación eléctrica y emplear buenas técnicas de conexión a tierra.
Siga estas pautas para evitar los efectos de la interferencia electromagnética:
• Aísle los transformadores de alimentación eléctrica o instale filtros de línea en todas las líneas de alimentación eléctrica de entrada de CA.• No instale los cables de motor sobre las aberturas de ventilación de los servovariadores.• Conecte a tierra todo el equipo mediante un sistema de tierra paralelo de un solo punto que emplee barras de bus o cintas grandes para
conexión a tierra. Si fuera necesario, use técnicas de reducción de ruido eléctrico adicionales para reducir la interferencia electromagnética en ambientes ruidosos.
Consulte el documento System Design for Control of Electrical Noise Reference Manual, publicación GMC-RM001, para obtener información adicional sobre cómo reducir la interferencia electromagnética.
ATENCIÓN: Los cojinetes del motor y el dispositivo de retroalimentación pueden resultar dañados si el eje sufre un impacto fuerte durante la instalación de los acoplamientos y poleas. El dispositivo de retroalimentación puede sufrir daños si se hace palanca en la superficie de montaje del motor al retirar los dispositivos montados en el eje del motor.
No golpee el eje, los acoplamientos o las poleas con herramientas al instalar o retirar el equipo. Use un extractor de rueda para aplicar presión desde el extremo de usuario del eje al intentar retirar cualquier dispositivo del eje del motor.
4 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Instalación de los cablesEl encaminamiento adecuado de los cables así como su construcción cuidadosa mejoran la compatibilidad electromagnética (EMC).
Para instalar los cables de alimentación del motor y el ventilador de enfriamiento, observe las siguientes pautas:
• Mantenga las longitudes de los cables lo más cortas posible.• Conecte a tierra los blindajes de los cables para evitar que la interferencia electromagnética afecte otros equipos.
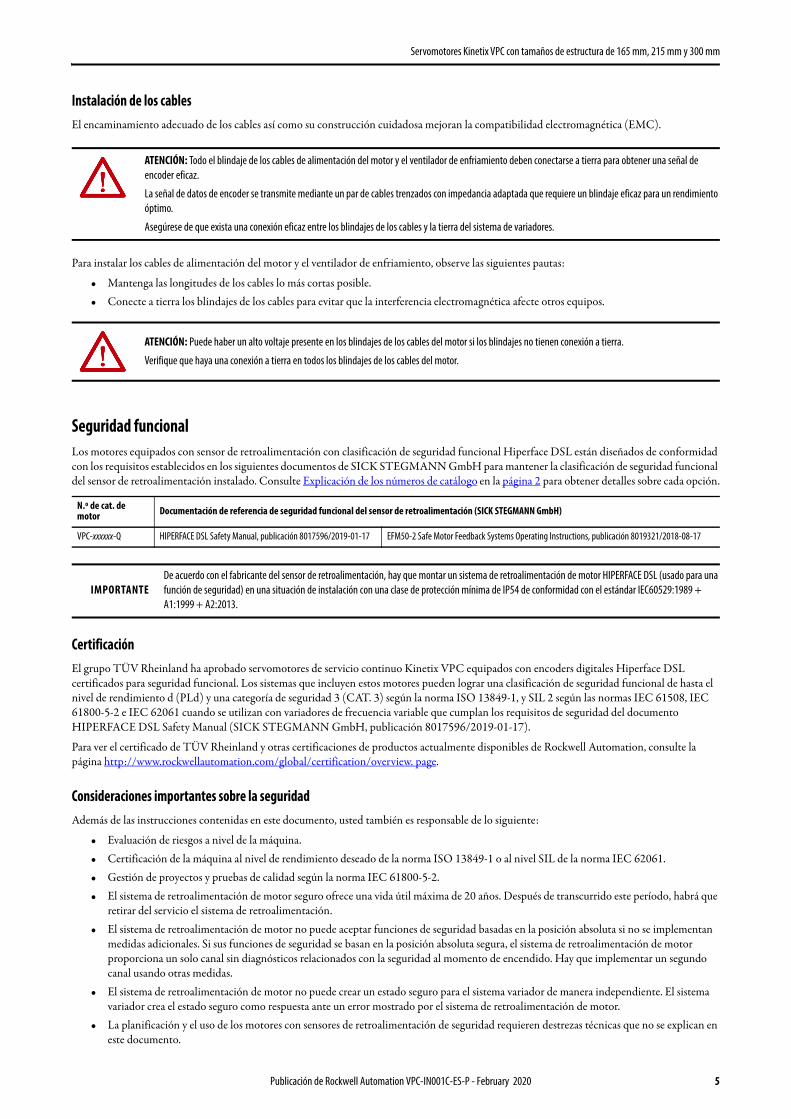
Seguridad funcionalLos motores equipados con sensor de retroalimentación con clasificación de seguridad funcional Hiperface DSL están diseñados de conformidad con los requisitos establecidos en los siguientes documentos de SICK STEGMANN GmbH para mantener la clasificación de seguridad funcional del sensor de retroalimentación instalado. Consulte Explicación de los números de catálogo en la página 2 para obtener detalles sobre cada opción.
CertificaciónEl grupo TÜV Rheinland ha aprobado servomotores de servicio continuo Kinetix VPC equipados con encoders digitales Hiperface DSL certificados para seguridad funcional. Los sistemas que incluyen estos motores pueden lograr una clasificación de seguridad funcional de hasta el nivel de rendimiento d (PLd) y una categoría de seguridad 3 (CAT. 3) según la norma ISO 13849-1, y SIL 2 según las normas IEC 61508, IEC 61800-5-2 e IEC 62061 cuando se utilizan con variadores de frecuencia variable que cumplan los requisitos de seguridad del documento HIPERFACE DSL Safety Manual (SICK STEGMANN GmbH, publicación 8017596/2019-01-17).
Para ver el certificado de TÜV Rheinland y otras certificaciones de productos actualmente disponibles de Rockwell Automation, consulte la página http://www.rockwellautomation.com/global/certification/overview. page.
Consideraciones importantes sobre la seguridadAdemás de las instrucciones contenidas en este documento, usted también es responsable de lo siguiente:
• Evaluación de riesgos a nivel de la máquina.• Certificación de la máquina al nivel de rendimiento deseado de la norma ISO 13849-1 o al nivel SIL de la norma IEC 62061.• Gestión de proyectos y pruebas de calidad según la norma IEC 61800-5-2.• El sistema de retroalimentación de motor seguro ofrece una vida útil máxima de 20 años. Después de transcurrido este período, habrá que
retirar del servicio el sistema de retroalimentación.• El sistema de retroalimentación de motor no puede aceptar funciones de seguridad basadas en la posición absoluta si no se implementan
medidas adicionales. Si sus funciones de seguridad se basan en la posición absoluta segura, el sistema de retroalimentación de motor proporciona un solo canal sin diagnósticos relacionados con la seguridad al momento de encendido. Hay que implementar un segundo canal usando otras medidas.
• El sistema de retroalimentación de motor no puede crear un estado seguro para el sistema variador de manera independiente. El sistema variador crea el estado seguro como respuesta ante un error mostrado por el sistema de retroalimentación de motor.
• La planificación y el uso de los motores con sensores de retroalimentación de seguridad requieren destrezas técnicas que no se explican en este documento.
ATENCIÓN: Todo el blindaje de los cables de alimentación del motor y el ventilador de enfriamiento deben conectarse a tierra para obtener una señal de encoder eficaz.
La señal de datos de encoder se transmite mediante un par de cables trenzados con impedancia adaptada que requiere un blindaje eficaz para un rendimiento óptimo.
Asegúrese de que exista una conexión eficaz entre los blindajes de los cables y la tierra del sistema de variadores.
ATENCIÓN: Puede haber un alto voltaje presente en los blindajes de los cables del motor si los blindajes no tienen conexión a tierra.
Verifique que haya una conexión a tierra en todos los blindajes de los cables del motor.
N.º de cat. de motor Documentación de referencia de seguridad funcional del sensor de retroalimentación (SICK STEGMANN GmbH)
VPC-xxxxxx-Q HIPERFACE DSL Safety Manual, publicación 8017596/2019-01-17 EFM50-2 Safe Motor Feedback Systems Operating Instructions, publicación 8019321/2018-08-17
IMPORTANTEDe acuerdo con el fabricante del sensor de retroalimentación, hay que montar un sistema de retroalimentación de motor HIPERFACE DSL (usado para una función de seguridad) en una situación de instalación con una clase de protección mínima de IP54 de conformidad con el estándar IEC60529:1989 + A1:1999 + A2:2013.
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 5

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Nivel de rendimiento (PL) y nivel de integridad de seguridad (SIL)En sistemas de control relacionados con la seguridad, nivel de rendimiento (PL), según la norma ISO 13849-1, y los niveles SIL, según las normas IEC 61508 e IEC 62061, incluya una clasificación de la capacidad del sistema de realizar sus funciones de seguridad. Se debe evaluar el riesgo y determinar los niveles alcanzados en todos los componentes relacionados con la seguridad del sistema de control.
Consulte las normas ISO 13849-1, IEC 61508 e IEC 62061 para obtener toda la información relacionada con los requisitos para la determinación de PL y SIL.
Parámetros relacionados con la seguridadLos motores equipados con un sensor de retroalimentación con clasificación de seguridad funcional Hiperface DSL están diseñados para mantener la clasificación de seguridad funcional del sensor de retroalimentación instalado. Los parámetros de seguridad del sensor de retroalimentación son los siguientes.
Instalación del motorLa instalación del motor debe cumplir con todos los reglamentos locales y prácticas de instalación y uso de equipo que promuevan la seguridad y la compatibilidad electromagnética:
• Todos los motores incluyen un piloto de montaje para alinear el motor en una máquina.• Todos los motores incluyen patas de montaje para un montaje opcional. Para obtener acceso a los agujeros de montaje de las patas traseras,
retire el subensamblaje del ventilador de enfriamiento.• Las piezas de sujeción preferidas son las de acero inoxidable.
Cambio de orientación del conectorKinetix VPC Los motores de servicio continuo con número de catálogo VPC-Bxxxxx-Qx1xxx utilizan un estilo de conector que integra la alimentación, el freno y las señales de retroalimentación en un solo conector. Puede identificar el estilo de conector por el número variable en la cadena del número de catálogo del motor. Por ejemplo, en el número de catálogo VPC-B16539-QJ12FS, el 1- indica un único SpeedTec, ángulo recto, conector giratorio 325°.
Kinetix VPC Los motores de servicio continuo con el número de catálogo VPC-Bxxxxx-S/-M/-Yx7xxx utilizan dos conectores separados. La alimentación y el freno están en un conector y el otro se utiliza para la retroalimentación. Por ejemplo, en el número de catálogo VPC-B1653A-YJ72FS, el 7 indica dos conectores SpeedTec, en ángulo-recto, giratorios. Estos conectores pueden girarse hasta 180° respecto a la línea central del motor.
El envolvente del conector giratorio le permite mover el conector hasta la posición que mejor proteja la conexión frente a los contaminantes ambientales y proporcione un fácil acceso.
ATENCIÓN: Para evitar dañar el equipo, no establezca ni retire conexiones eléctricas en el sistema de retroalimentación del motor con el voltaje aplicado.
Atributo VPC-Bxxxxx-QxxxFx VPC-Bxxxxx-QxxxFx
Nivel de integridad de seguridad (SIL) SIL2 (IEC 61508), SIL CL2 (IEC 62061)
Probabilidad de un fallo peligroso por hora (PFH) 3.80 E-08 1/h
Categoría de seguridad CAT. 3 (ISO 13849-1)
Nivel de rendimiento (PL) PLd (ISO 13849-1)
MTTF (años) 305
ATENCIÓN: Los motores no montados, acoplamientos mecánicos desconectados, chavetas de eje sueltas y cables desconectados son peligrosos si se conecta la alimentación eléctrica.
Identifique el equipo desarmado e impida el acceso a la alimentación eléctrica (bloqueo-etiquetado de seguridad).
Antes de conectar la alimentación eléctrica al motor, retire la chaveta del eje y otros acoplamientos mecánicos que podrían salir disparados del eje.
ATENCIÓN: Verifique que los cables estén instalados y sujetados para evitar una tensión o flexión dispareja en el conector. Proporcione soporte en intervalos de 3 m (10 pies) a lo largo de la longitud del cable.
Una fuerza lateral excesiva o desigual en el conector del cable puede ocasionar que se abra y cierre el sello ambiental en el conector a medida que se flexiona el cable.
6 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Siga estos pasos para girar un conector a una nueva posición.
1. Instale y asiente debidamente un cable de empalme en el conector del motor.El conector ofrece una mayor área de sujeción y extiende la fuerza de palanca.
2. Sujete el conector de empalme y el conector del cable con las manos, y gire lentamente el conector del motor hasta la nueva posición.
3. Retire el conector del cable después de que el conector esté alineado.
Instalación del motor Siga estos pasos para instalar el motor.
1. Deje suficiente espacio libre alrededor del motor y detrás del ventilador de enfriamiento para la disipación de calor de manera que el motor se mantenga dentro del rango especificado de temperaturas de funcionamiento.
Consulte Especificaciones ambientales en la página 28 para determinar el rango de temperaturas de funcionamiento. No coloque el motor en un envolvente. Aleje del motor cualquier dispositivo que genere calor.
2. Consulte Clasificaciones de fuerza de carga del motor en la página 15 para determinar los límites de carga de eje radial y axial del motor.
3. Si utiliza las patas de montaje opcionales, retire el subensamblaje del ventilador de enfriamiento para obtener acceso a las patas de montaje traseras.
4. Monte y alinee el motor.
ATENCIÓN: Los conectores están diseñados para girar a una posición fija durante la instalación del motor y permanecer en dicha posición sin ajuste adicional. Limite estrictamente las fuerzas aplicadas y el número de veces que se gira el conector para asegurarse de que los conectores satisfagan la clasificación de protección internacional (IP) como se describe en Especificaciones ambientales en la página 28.
ATENCIÓN: Use solo fuerza manual al cambiar la orientación del conector.
No aplique fuerza ni tire del cable, ni tampoco use herramientas como pinzas o prensas de tornillo para girar el conector.
ATENCIÓN: Los cojinetes del motor y el dispositivo de retroalimentación pueden resultar dañados si el eje sufre un impacto fuerte durante la instalación de los acoplamientos y poleas. El dispositivo de retroalimentación puede sufrir daños si se hace palanca en la superficie de montaje del motor al retirar los dispositivos montados en el eje del motor.
No golpee el eje, los acoplamientos o las poleas con herramientas al instalar o retirar el equipo. Use un extractor de rueda para aplicar presión desde el extremo de usuario del eje al intentar retirar cualquier dispositivo del eje del motor.
PELIGRO DE QUEMADURA: Las superficies exteriores del motor pueden alcanzar una alta temperatura (125 °C [257 °F]) durante el funcionamiento del motor.
Tome precauciones para evitar un contacto accidental con las superficies calientes. Tenga en cuenta la temperatura de la superficie del motor al seleccionar los cables y las conexiones de empalme del motor.
Tornillos de montaje de subensamblaje de ventilador de enfriamiento (4x)
Patas de montaje visibles
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 7

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
5. Si ha retirado el ensamblaje del ventilador de enfriamiento, vuelva a colocarlo y apriete los tornillos de montaje del subensamblaje del ventilador a los valores que se indican.
6. Conecte los cables del motor que transmiten la alimentación, la retroalimentación y las señales de freno.a. Alinee cuidadosamente el conector del cable con el conector del motor.
La superficie plana en la parte superior del conector del motor y las superficies planas del conector del cable deben estar alineadas para que el conector del cable empalme con el conector del motor.
b. Apriete manualmente el collarín estriado un cuarto de vuelta para asentar completamente el conector del cable.
c. Si corresponde, forme un bucle de goteo en los cables para alejar los líquidos de los conectores.
N.º de cat. del ventilador de enfriamiento
Tamaño del tornillo de montaje
ParN•m (lb•pulg.)
VPC-FAN165 M5 x 0.8 x 20 4.1…4.9 (36…43)
VPC-FAN215 M6 x 1 x 25 6.9…8.3 (61…73)
VPC-FAN300 M8 x 1.25 x 35 16.6…20.2 (147…179)
ATENCIÓN: Los conectores codificados deben alinearse correctamente y apretarse a mano.
No use herramientas ni aplique fuerza excesiva al empalmar el cable con el conector del motor. Si no logra enchufar los conectores empleando una ligera fuerza manual, realinéelos e intente nuevamente.
ATENCIÓN: Todo el blindaje en el cable de motor único debe conectarse a tierra para obtener una señal de encoder eficaz.
La señal de datos de encoder se transmite mediante un par de cables trenzados con impedancia adaptada que requiere un blindaje eficaz para un rendimiento óptimo.
Asegúrese de que exista una conexión eficaz entre el blindaje del cable de motor único y la tierra del sistema variador.
Bucle de goteo para motor montado de pie con conectores en la parte superior.
Bucle de goteo para montado en brida con conector en la parte inferior.
8 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Dim
ensio
nes d
e los
mot
ores
VPC-B
165x
x, VP
C-B21
5xx y
VPC-B
300x
x (un
solo
cone
ctor, c
on ve
ntila
dor)
LEAD
HD
GE
F
LLB
L-LB SH
LAT
N
45°
LE BC
D
H
A
LD
P
ADHD
Vea e
l det
alle A
Deta
lle d
e eje
con
chav
eta
Tole
ranc
ia d
el di
ámet
ro d
el ej
e (D)
VPC-
B165
xx =
Ø 32
.002…
32.01
8 (1.2
599…
1.260
5)VP
C-B2
15xx
= Ø
38.00
2…38
.015 (
1.496
1…1.4
968)
VPC-
B300
xx =
Ø 48
.002…
48.01
8 (1.8
898…
1.890
5)
Deta
lle A
Diám
etro
del e
je
Aguje
ros d
e diám
etro
S en
círcu
lo de
pern
os de
diám
etro
M
Las d
imen
sione
s se i
ndica
n en
mm
(pul
g.)
Tole
ranc
ias d
el di
ámet
ro d
el pi
loto
(N)
Mot
ores
VPC-
B165
xx:
Ø 12
9.898
…13
0.014
(5.11
77…
5.118
7)M
otor
es VP
C-B2
15xx
:Ø
179.9
89…
180.0
14 (7
.0862
…7.0
871)
Mot
ores
VPC-
B300
xx:
Ø 24
9.987
…25
0.016
(9.84
20…
9.843
1)
Tole
ranc
ias d
el ej
e, d
el p
iloto
y de
la
ranu
ra de
chav
eta
VPC-
B165
xxVP
C-B2
15xx
VPC-
B300
xx
Desce
ntra
mien
to de
eje (
T.I.R
.)0.0
5 (0.0
02)
Exce
ntric
idad d
e pilo
to (T
.I.R.)
0.10 (
0.003
9)
Desce
ntra
mien
to de
cara
máx
. (T.I
.R.)
0.10 (
0.003
9)0.1
25 (0
.0049
)
Prof
undid
ad de
la ra
nura
de ch
avet
a (GE
)5.0
…5.2
(0
.197…
0.205
)5.5
…5.7
(0
.216…
0.224
)
Anch
ura d
e la r
anur
a de c
have
ta (F
)9.9
64…
10.00
0 (0
.3923
…0.3
937
13.95
7…14
.000
(0.54
95…
0.551
2)
Chav
eta s
umin
istra
daVP
C-B1
65xx
= Ch
avet
a 10 (+
0, -0
.036)
x 8 (+
0, -0
.090)
x 59
VPC-
B215
xx =
Chav
eta 1
0 (+0,
-0.03
6) x
8 (+0,
-0.09
0) x 5
9VP
C-B3
00xx
= Ch
avet
a 14 (+
0, -0
.043)
x 9 (+
0, -0
.090)
x 79
Diám
etro
del p
iloto
(N)
Long
itud d
e la r
anur
a de
chav
eta
VPC-
B165
xx =
60.0
(2.36
)VP
C-B2
15xx
= 60
.0 (2
.36)
VPC-
B300
xx =
81.0
(3.19
)
Tole
ranc
ias d
e la a
ltura
del
pilo
to (T
)VP
C-B1
65xx
= 2.
5…3.5
(0.09
8…0.1
38)
VPC-
B215
xx =
3.0…
4.0 (0
.118…
0.157
)VP
C-B3
00xx
= 3.
5…5.0
(0.13
8…0.1
97)
Prof
undid
ad
del v
entil
ador
Sepa
ració
n po
sterio
r
Prof
undi
dad d
el ve
ntila
dor
(refe
renc
ia)
VPC-
B165
xx =
112 (
4.40)
VPC-
B215
xx =
132 (
5.20)
VPC-
B300
xx =
210 (
8.30)
Sello
de e
jeCo
nsult
e la p
ágina
28 pa
ra ob
tene
r info
rmac
ión so
bre
el kit
de se
llos d
e eje
para
mot
ores
Kinet
ix VP
C.
Los e
nvolv
ente
s del
cone
ctor M
23 gi
ran 3
25°
Los e
nvolv
ente
s del
cone
ctor M
40 gi
ran 3
30°
Aguj
ero r
osca
do de
l ex
trem
o del
eje
Mot
ores
VPC-
B165
xx:
Rosc
a - M
10 x
1.5-6
H Pr
of. de
rosc
a - 22
(0.86
)M
otor
es VP
C-B2
15xx
:Ro
sca -
M12
x 1.7
5-6H
Pr
of. ro
sca -
28 (1
.10)
Mot
ores
VPC-
B300
xx:
Rosc
a - M
16 x
2-6H
Pr
of. ro
sca -
36 (1
.42)
Tole
ranc
ias d
el d
iám
etro
de l
os ag
ujer
os
de m
onta
je d
e pie
(K)
VPC-
B165
xx =
Ø 10
.00…
10.36
(Ø 0.
394…
0.408
)VP
C-B2
15xx
= Ø
12.00
…12
.43 (Ø
0.47
2…0.4
89)
VPC-
B300
xx =
Ø 12
.00…
12.43
(Ø 0.
472…
0.489
)
Tole
ranc
ias d
el d
iám
etro
de lo
s agu
jero
s de
l círc
ulo d
e per
nos (
S)VP
C-B1
65xx
= Ø
12.00
…12
.43 (Ø
0.47
2…0.4
89)
VPC-
B215
xx =
Ø 14
.50…
14.93
(Ø 0.
571…
0.588
)VP
C-B3
00xx
= Ø
18.50
…19
.02 (Ø
0.72
8…0.7
49)
Cone
ctor
del
mot
or en
m
otor
es K
inet
ix VP
CN.
º de c
at.
de m
otor
(1)
(1)
Los n
úmer
os de
catá
logo B
/ y A
/ rep
rese
ntan
la ve
locida
d no
mina
l del
mot
or si
n ven
tilad
or. /D
repr
esen
ta la
veloc
idad
nom
inal d
el m
otor
con v
entil
ador.
Cone
ctor M
23
VPC-
B165
2xVP
C-B1
653x
VPC-
B215
3xVP
C-B2
1549
Cone
ctor M
40
VPC-
B165
4DVP
C-B2
154A
VPC-
B215
4B/D
VPC-
B215
5B/D
VPC-
B215
6A/D
VPC-
B300
29VP
C-B3
002A
VPC-
B300
39VP
C-B3
003A
VPC-
B300
49
Prof
undid
ad
del v
entil
ador
Un so
lo co
necto
r M23
Un so
lo co
necto
r M40
Aguje
ros d
e diám
etro
K a t
ravé
s de l
as pa
tas
Diám
etro
del e
je
Long
itud d
e la r
anur
a de
chav
eta
Chav
eta r
etira
da
para
may
or cl
arida
d
Tole
ranc
ias d
e la a
ltura
del
eje (
SH)
VPC-
B165
xx =
79.5…
80.0
(3.13
…3.1
5)VP
C-B2
15xx
= 99
.8…10
0.0 (3
.92…
3.94)
VPC-
B300
xx =
131.5
…13
2.0 (5
.18…
.5.20
)
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 9

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Los m
otor
es se
dise
ñan
segú
n di
men
sione
s mét
ricas
. Las
dim
ensio
nes e
n pu
lgad
as so
n co
nver
sione
s apr
oxim
adas
de l
as m
edid
as en
milí
met
ros.
Las d
imen
sione
s sin
tole
ranc
ias s
e mue
stran
com
o re
fere
ncia
.
Dim
ensio
nes d
e los
mot
ores
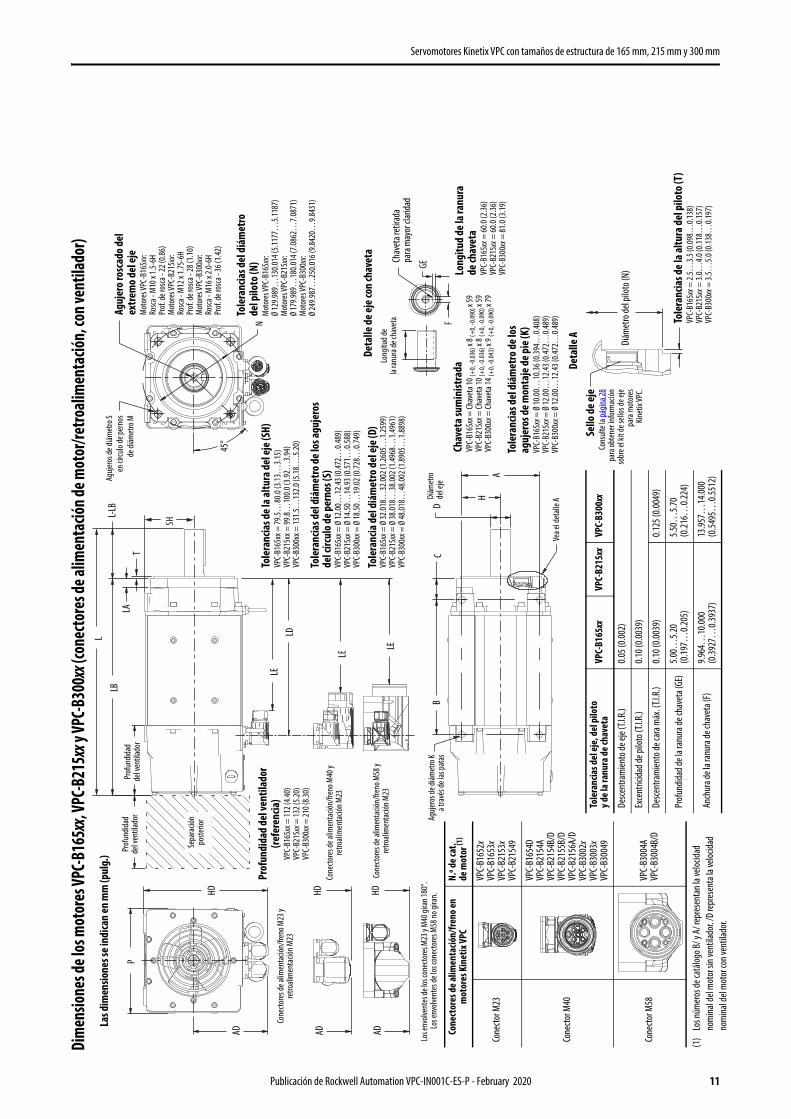
VPC-
B165
xx, V
PC-B
215x
x y VP
C-B3
00xx
(un
solo
cone
ctor
)
N.º d
e cat
. de
mot
or (1
)
(1)
Los n
úmer
os de
catá
logo /
B y /A
repr
esen
tan l
a velo
cidad
nom
inal d
el m
otor
sin v
entil
ador.
D/ r
epre
sent
a la v
elocid
ad no
mina
l del
mot
or co
n ven
tilad
or.
AD mm
(p
ulg.)
HD mm
(pul
g.)
T (4)
mm
(p
ulg.)
LA mm
(p
ulg.)
LD (2
)
mm
(p
ulg.)
(2)
Si se
pide
n mot
ores
VPC-
B165
2x co
n fre
no, s
ume 5
5.5m
m (2
.19pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B165
3x o
VPC-
B165
4D co
n fre
no, s
ume 4
0.5m
m (1
.59pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B215
3x, V
PC-B
2154
x o VP
C-B2
156A
/D co
n fre
no, s
ume 8
1.0m
m (3
.19pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B215
5B/D
con f
reno
, sum
e 121
.5m
m (4
.78pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B300
2x co
n fre
no, s
ume 4
7.5m
m (1
.87 pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B300
3x co
n fre
no, s
ume 9
5.0m
m (3
.74pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B300
4x co
n fre
no, s
ume 1
42.5
mm
(5.61
pulg.
) a la
s dim
ensio
nes L
, LB,
LE, L
D y B
.
LE (2
)
mm
(p
ulg.)
L (2)
mm
(p
ulg.)
LB (2
)
mm
(p
ulg.)
L-LB
(3)
mm
(p
ulg.)
(3)
La to
leran
cia de
esta
dim
ensió
n es ±
0.7m
m (±
0.028
pulg.
).
A mm
(p
ulg.)
B (2
)
mm
(p
ulg.)
C mm
(p
ulg.)
SH (4
)
mm
(p
ulg.)
H mm
(p
ulg.)
D (4
)
mm
(p
ulg.)
M (4
)
mm
(p
ulg.)
S (4)
mm
(p
ulg.)
K (4
)
mm
(p
ulg.)
N (4
)
mm
(pulg
.)
P mm
(p
ulg.)
GE (4
)
mm
(p
ulg.)
(4)
Para
cono
cer la
s tole
ranc
ias de
l diám
etro
del e
je, el
diám
etro
del a
gujer
o de m
onta
je, el
diám
etro
del p
iloto
y la
ranu
ra de
chav
eta,
cons
ulte l
a figu
ra de
la pá
gina9
.
F (4)
mm
(p
ulg.)
VPC-
B165
2x12
0.5
(4.75
)20
0.3(7
.89)
3.5
(0.14
)14
.3(0
.56)
251.9
(9.92
)21
1.9(8
.34)
427.6
(16.8
3)34
7.6(1
3.69)
80.0
(3.15
)12
5.0(4
.92)
216.9
(8.54
)
34.0
(1.34
)80
.0(3
.15)
62.5
(2.46
)32
.00(1
.260)
165.0
0(6
.496)
12.00
(0.47
2)10
.00(0
.394)
130.0
0(5
.118)
168.9
(6.65
)5.0
0(0
.198)
10.00
(0.39
4)VP
C-B1
653x
307.4
(12.1
0)26
7.4(1
0.53)
483.1
(19.0
2)40
3.1(1
5.87)
272.4
(10.7
2)
VPC-
B165
4D14
0.0(5
.51)
219.0
8(8
.65)
352.1
(13.8
6)28
1.1(1
1.07)
523.6
(20.6
1)44
3.6(1
7.46)
312.9
(12.3
2)
VPC-
B215
3x14
0.5(5
.53)
240.5
(9.47
)
4.0
(0.16
)18
.4(0
.72)
328.4
(12.9
3)28
8.5(1
1.36)
520.1
(20.4
8)44
0.1(1
7.33)
80.0
(3.15
)16
0.0(6
.30)
284.9
(11.2
2)
43.0
(1.69
)10
0.00
(3.94
)80
.0(3
.15)
38.00
(1.49
6)21
5.00
(8.46
5)14
.50(0
.571)
12.00
(0.47
2)18
0.00
(7.08
7)21
0.9(8
.30)
5.00
(0.19
8)10
.00(0
.394)
VPC-
B215
4936
8.9(1
4.52)
329.0
(12.9
5)56
0.6(2
2.07)
480.6
(18.9
2)32
5.4(1
2.81)
VPC-
B215
4A
160.5
(6.32
)26
0.5(1
0.25)
297.9
(11.7
3)VP
C-B2
154B
/D
VPC-
B215
5B/D
409.4
(1
6.12)
338.4
(13.3
2)60
1.1(2
3.67)
521.1
(20.5
2)36
5.9(1
4.41)
VPC-
B215
6A/D
449.9
(1
7.71)
378.9
(14.9
2)64
1.6(2
5.26)
561.6
(22.1
1)40
6.4(1
6.00)
VPC-
B300
2x
192.0
(7.56
)32
4.0(1
2.75)
5.0
(0.20
)22
.9(0
.90)
400.7
(1
5.78)
329.7
(12.9
8)69
2.1(2
7.23)
582.1
(22.9
2)11
0.0(4
.33)
216.0
(8.50
)
344.7
(13.5
7)53
.0(2
.09)
132.0
0(5
.20)
108.0
(4.25
)48
.00(1
.890)
300.0
0(1
1.811
)18
.50(0
.728)
12.00
(0.47
2)25
0.00
(9.84
3)27
5.9(1
0.86)
5.50
(0.21
7)14
.00(0
.551)
VPC-
B300
3x
VPC-
B300
4944
8.2(1
7.65)
377.2
(14.8
5)73
9.6(2
9.12)
629.6
(24.7
9)39
2.2(1
5.44)
10 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Dim
ensio
nes d
e los
mot
ores
VPC-B
165x
x, VP
C-B21
5xx y
VPC-B
300x
x (co
necto
res d
e alim
enta
ción d
e mot
or/re
troali
men
tació
n, co
n ven
tilad
or)
HD
P
B
A
CD
F
GE
AD
H
ADHD
LE
LD
ADHD
LE
45°
N
LBL-L
BLA
T
L
LE
SH
Tole
ranc
ias d
el ej
e, d
el p
iloto
y d
ela r
anur
a de c
have
taVP
C-B1
65xx
VPC-
B215
xxVP
C-B3
00xx
Desce
ntra
mien
to de
eje (
T.I.R
.)0.0
5 (0.0
02)
Exce
ntric
idad d
e pilo
to (T
.I.R.)
0.10 (
0.003
9)
Desce
ntra
mien
to de
cara
máx
. (T.I
.R.)
0.10 (
0.003
9)0.1
25 (0
.0049
)
Prof
undid
ad de
la ra
nura
de ch
avet
a (GE
)5.0
0…5.2
0(0
.197…
0.205
)5.5
0…5.7
0(0
.216…
0.224
)
Anch
ura d
e la r
anur
a de c
have
ta (F
)9.9
64…
10.00
0(0
.3927
…0.3
937)
13.95
7…14
.000
(0.54
95…
0.551
2)
Vea e
l det
alle A
Chav
eta s
umin
istra
daVP
C-B1
65xx
= Ch
avet
a 10 (+
0, -0
.036)
x 8 (+
0, -0
.090)
x 59
VPC-
B215
xx =
Chav
eta 1
0 (+0,
-0.03
6) x
8 (+0,
-0.09
0) x 5
9VP
C-B3
00xx
= Ch
avet
a 14 (+
0, -0
.043)
x 9 (+
0, -0
.090)
x 79
Deta
lle de
eje c
on ch
avet
aTo
lera
ncia
del
diám
etro
del
eje (
D)VP
C-B1
65xx
= Ø
32.01
8…32
.002 (
1.260
5…1.2
599)
VPC-
B215
xx =
Ø 38
.018…
38.00
2 (1.4
968…
1.496
1)VP
C-B3
00xx
= Ø
48.01
8…48
.002 (
1.890
5…1.8
898)
Deta
lle A
Diám
etro
del e
jeAguj
eros
de di
ámet
ro S
en cí
rculo
de pe
rnos
de di
ámet
ro M
Aguj
ero r
osca
do de
l ex
trem
odel
eje
Mot
ores
VPC-
B165
xx:
Rosc
a - M
10 x
1.5-6
HPr
of. de
rosc
a - 22
(0.86
)M
otor
es VP
C-B2
15xx
:Ro
sca -
M12
x 1.7
5-6H
Prof.
de ro
sca -
28 (1
.10)
Mot
ores
VPC-
B300
xx:
Rosc
a - M
16 x
2.0-6
HPr
of. de
rosc
a - 36
(1.42
)
Sello
de e
jeCo
nsul
te la
págin
a28
para
obte
ner in
form
ación
sobr
e el k
it de
sello
s de e
jepa
ra m
otor
esKin
etix
VPC.
Las d
imen
sione
s se i
ndica
n en
mm
(pul
g.)
Los e
nvolv
ente
s de l
os co
necto
res M
23 y
M40
gira
n 180
°. Lo
s env
olven
tes d
e los
cone
ctore
s M58
no gi
ran.
Long
itud
de la
ranu
ra
de ch
avet
aVP
C-B1
65xx
= 60
.0 (2
.36)
VPC-
B215
xx =
60.0
(2.36
)VP
C-B3
00xx
= 81
.0 (3
.19)
Diám
etro
del p
iloto
(N)
Tole
ranc
ias d
e la a
ltura
del
pilo
to (T
)VP
C-B1
65xx
= 2.
5…3.5
(0.09
8…0.1
38)
VPC-
B215
xx =
3.0…
4.0 (0
.118…
0.157
)VP
C-B3
00xx
= 3.
5…5.0
(0.13
8…0.1
97)
Tole
ranc
ias d
el d
iám
etro
de
lpilo
to (N
)M
otor
es VP
C-B1
65xx
:Ø
129.9
89…
130.0
14 (5
.1177
…5.1
187)
Mot
ores
VPC-
B215
xx:
Ø 17
9.989
…18
0.014
(7.08
62…
7.087
1)M
otor
es VP
C-B3
00xx
:Ø
249.9
87…
250.0
16 (9
.8420
…9.8
431)
Cone
ctore
s de a
limen
tació
n/fre
no M
40 y
retro
alim
enta
ción M
23
Cone
ctore
s de a
limen
tació
n/fre
no M
23 y
retro
alim
enta
ción M
23
Cone
ctor
es d
e alim
enta
ción/
freno
en
mot
ores
Kin
etix
VPC
N.º d
e cat
. de
mot
or (1
)
(1)
Los n
úmer
os de
catá
logo B
/ y A/
repr
esen
tan l
a velo
cidad
no
mina
l del
mot
or si
n ven
tilad
or. /D
repr
esen
ta la
veloc
idad
nom
inal d
el m
otor
con v
entil
ador.
Cone
ctor M
23
VPC-
B165
2xVP
C-B1
653x
VPC-
B215
3xVP
C-B2
1549
Cone
ctor M
40
VPC-
B165
4DVP
C-B2
154A
VPC-
B215
4B/D
VPC-
B215
5B/D
VPC-
B215
6A/D
VPC-
B300
2xVP
C-B3
003x
VPC-
B300
49
Cone
ctor M
58VP
C-B3
004A
VPC-
B300
4B/D
Cone
ctore
s de a
limen
tació
n/fre
no M
58 y
retro
alim
enta
ción M
23Lo
ngitu
d de
la ra
nura
de ch
avet
aCh
avet
a ret
irada
para
may
or cl
arida
d
Sepa
ració
n po
sterio
r
Prof
undid
ad
del v
entil
ador
Prof
undid
ad
del v
entil
ador Ag
ujero
s de d
iámet
ro K
a tra
vés d
e las
pata
s
Prof
undi
dad
del v
entil
ador
(re
fere
ncia
)VP
C-B1
65xx
= 11
2 (4.4
0)VP
C-B2
15xx
= 13
2 (5.2
0)VP
C-B3
00xx
= 21
0 (8.3
0)To
lera
ncia
s del
diá
met
ro de
los a
guje
ros
del c
írcul
o de p
erno
s (S)
VPC-
B165
xx =
Ø 12
.00…
12.43
(0.47
2…0.4
89)
VPC-
B215
xx =
Ø 14
.50…
14.93
(0.57
1…0.5
88)
VPC-
B300
xx =
Ø 18
.50…
19.02
(0.72
8…0.7
49)
Tole
ranc
ias d
el di
ámet
ro d
e los
ag
ujer
os de
mon
taje
de p
ie (K
)VP
C-B1
65xx
= Ø
10.00
…10
.36 (0
.394…
0.408
)VP
C-B2
15xx
= Ø
12.00
…12
.43 (0
.472…
0.489
)VP
C-B3
00xx
= Ø
12.00
…12
.43 (0
.472…
0.489
)
Tole
ranc
ias d
e la a
ltura
del e
je (S
H)VP
C-B1
65xx
= 79
.5…80
.0 (3
.13…
3.15)
VPC-
B215
xx =
99.8…
100.0
(3.92
…3.9
4)VP
C-B3
00xx
= 13
1.5…
132.0
(5.18
….5.
20)
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 11

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Dim
ensio
nes d
e los
mot
ores
VPC-
B165
xx, V
PC-B
215x
x y VP
C-B3
00xx
(con
ecto
res d
e alim
enta
ción
de m
otor
/retr
oalim
enta
ción)
Los m
otor
es se
dise
ñan
segú
n di
men
sione
s mét
ricas
. Las
dim
ensio
nes e
n pu
lgad
as so
n co
nver
sione
s apr
oxim
adas
de l
as m
edid
as en
milí
met
ros.
Las d
imen
sione
s sin
tole
ranc
ias s
e mue
stran
com
o re
fere
ncia
.
N.º d
e cat
. de
mot
or (1
)
(1)
Los n
úmer
os de
catá
logo /
B y /A
repr
esen
tan l
a velo
cidad
nom
inal d
el m
otor
sin v
entil
ador.
D/ r
epre
sent
a la v
elocid
ad no
mina
l del
mot
or co
n ven
tilad
or.
AD mm
(p
ulg.)
HD mm
(p
ulg.)
T (4)
mm
(p
ulg.)
LA mm
(p
ulg.)
LD (2
)
mm
(p
ulg.)
(2)
Si se
pide
n mot
ores
VPC-
B165
2x co
n fre
no, s
ume 5
5.5m
m (2
.19pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B165
3x o
VPC-
B165
4D co
n fre
no, s
ume 4
0.5m
m (1
.59pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B215
3x, V
PC-B
2154
x o VP
C-B2
156A
/D co
n fre
no, s
ume 8
1.0m
m (3
.19pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B215
5B/D
con f
reno
, sum
e 121
.5m
m (4
.78pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B300
2x co
n fre
no, s
ume 4
7.5m
m (1
.87 pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B300
3x co
n fre
no, s
ume 9
5.0m
m (3
.74pu
lg.) a
las d
imen
sione
s L, L
B, LE
, LD
y B.
Si se
pide
n mot
ores
VPC-
B300
4x co
n fre
no, s
ume 1
42.5
mm
(5.61
pulg.
) a la
s dim
ensio
nes L
, LB,
LE, L
D y B
.
LE (2
)
mm
(p
ulg.)
L (2)
mm
(p
ulg.)
LB (2
)
mm
(p
ulg.)
L-LB
(3)
mm
(p
ulg.)
(3)
La to
leran
cia de
esta
dim
ensió
n es ±
0.7m
m (±
0.028
pulg.
).
A mm
(p
ulg.)
B (2
)
mm
(p
ulg.)
C mm
(p
ulg.)
SH (4
)
mm
(p
ulg.)
H mm
(p
ulg.)
D (4
)
mm
(p
ulg.)
(4)
Para
cono
cer la
s tole
ranc
ias de
l diám
etro
del e
je, el
diám
etro
del a
gujer
o de m
onta
je, el
diám
etro
del p
iloto
y la
ranu
ra de
chav
eta,
cons
ulte l
a figu
ra de
la pá
gina1
1 .
M (4
)
mm
(p
ulg.)
S (4)
mm
(p
ulg.)
K (4
)
mm
(p
ulg.)
N (4
)
mm
(pulg
.)
P mm
(p
ulg.)
GE (4
)
mm
(p
ulg.)
F (4)
mm
(p
ulg.)
VPC-
B165
2x12
0.5
(4.75
)20
0.3(7
.89)
3.5 (0.14
)14
.3(0
.56)
251.9
(9.92
)21
1.9(8
.34)
427.6
(16.8
3)34
7.6(1
3.69)
80.0
(3.15
)12
5.0(4
.92)
216.9
(8.54
)
34.0
(1.34
)80
.0(3
.15)
62.5
(2.46
)32
.0(1
.260)
165.0
(6.49
6)12
.00(0
.472)
10.00
(0.39
4)13
0.0(5
.118)
168.9
(6.65
)5.0
0(0
.198)
10.00
(0.39
4)VP
C-B1
653x
307.4
(12.1
0)26
7.4(1
0.53)
483.1
(19.0
2)40
3.1(1
5.87)
272.4
(10.7
2)
VPC-
B165
4D14
0.0(5
.51)
219.9
(8.66
)35
2.1(1
3.86)
281.1
(11.0
7)52
3.6(2
0.61)
443.6
(17.4
6)31
2.9(1
2.32)
VPC-
B215
3x14
0.5(5
.53)
240.5
(9.47
)
4.0 (0.16
)18
.4(0
.72)
328.4
(12.9
3)28
8.5(1
1.40)
520.1
(20.4
8)44
0.1(1
7.33)
80.0
(3.15
)16
0.0(6
.30)
284.9
(11.2
2)
43.0
(1.69
)10
0.00
(3.94
)80
.00(3
.15)
38.00
(1.49
6)21
5.00
(8.46
5)14
.50(0
.571)
12.00
(0.47
2)18
0.00
(7.08
7)21
0.9(8
.30)
5.00
(0.19
8)10
.00(0
.394)
VPC-
B215
4936
8.9(1
4.52)
329.0
(12.9
5)56
0.6(2
2.07)
480.6
(18.9
2)32
5.4(1
2.81)
VPC-
B215
4A
160.1
(6.30
)26
0.1(1
0.24)
297.9
(11.7
3)VP
C-B2
154B
/D
VPC-
B215
5B/D
409.4
(16.1
2)33
8.4(1
3.32)
601.1
(23.6
7)52
1.1(2
0.52)
365.9
(14.4
1)
VPC-
B215
6A/D
449.9
(17.7
1)37
8.9(1
4.92)
641.6
(25.2
6)56
1.6(2
2.11)
406.4
(16.0
0)
VPC-
B300
2x
192.0
(7.56
)32
4.0(1
2.76)
5.0 (0.20
)22
.9(0
.90)
400.7
(15.7
8)32
9.7(1
2.98)
692.1
(27.2
3)58
2.1(2
2.92)
110.0
(4.33
)21
6.0(8
.50)
344.7
(13.5
7)
53.0
(2.09
)13
2.00
(5.20
)10
8.0(4
.25)
48.00
(1.89
0)30
0.00
(11.8
11)
18.50
(0.72
8)12
.00(0
.472)
250.0
0(9
.843)
275.9
(10.8
6)5.5
0(0
.217)
14.00
(0.55
1)
VPC-
B300
3x
VPC-
B300
4944
8.2(1
7.65)
377.2
(14.8
5)73
9.6(2
9.12)
629.6
(24.7
9)39
2.2(1
5.44)
VPC-
B300
4A20
3.3(8
.00)
335.3
(13.2
)40
0.2(1
5.76)
VPC-
B300
4B/D
12 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Dim
ensio
nes d
e los
mot
ores
VPC-B
165x
x, VP
C-B21
5xx y
VPC-B
300x
x (sin
vent
ilado
r)
LBL
LBL
Las d
imen
sione
s se i
ndica
n en
mm
(pul
g.)
Cone
ctore
s de a
limen
tació
n/fre
no M
23 y
retro
alim
enta
ción M
23
Un so
lo co
necto
r M23
N.º d
e cat
. de
mot
or (1
)L (2
)
mm
(p
ulg.)
LB (2
)
mm
(p
ulg.)
N.º d
e cat
. de
mot
or
L (2)
mm
(p
ulg.)
LB (2
)
mm
(p
ulg.)
VPC-
B165
2x36
1.7(1
4.24)
281.7
(11.0
9)VP
C-B2
155B
/D51
5.0(2
0.28)
435.0
(17.1
3)
VPC-
B165
3x41
7.2(1
6.43)
337.2
(13.2
7)VP
C-B2
156A
/D55
5.5(2
1.87)
475.5
(18.7
2)
VPC-
B165
4D45
7.7(1
8.02)
377.7
(14.8
7)VP
C-B3
002x
578.8
(22.7
9)46
8.8(1
8.46)
VPC-
B215
3x43
4.0(1
7.09)
354.0
(13.9
3)VP
C-B3
003x
578.6
(22.7
8)46
8.6(1
8.45)
VPC-
B215
4947
4.5(1
8.68)
394.5
(15.5
3)
VPC-
B300
4962
6.3(2
4.66)
516.3
(20.3
2)VP
C-B2
154A
VPC-
B300
4A
VPC-
B215
4B/D
VPC-
B300
4B/D
(1)
Los n
úmer
os de
catá
logo B
/ y A/
repr
esen
tan l
a velo
cidad
nom
inal d
el m
otor
sin v
entil
ador.
/D re
pres
enta
la ve
locida
d nom
inal d
el m
otor
con v
entil
ador.
(2)
Si se
pide
n mot
ores
VPC-
B165
2x co
n fre
no, s
ume 5
5.5m
m (2
.19pu
lg.) a
las d
imen
sione
s L y
LB.
Si se
pide
n mot
ores
VPC-
B165
3x o
VPC-
B165
4D co
n fre
no, s
ume 4
0.5m
m (1
.59pu
lg.) a
las d
imen
sione
s L y
LB.
Si se
pide
n mot
ores
VPC-
B215
3x, V
PC-B
2154
x o VP
C-B2
156A
/D co
n fre
no, s
ume 8
1.0m
m (3
.19pu
lg.) a
las d
imen
sione
s L y
LB.
Si se
pide
n mot
ores
VPC-
B215
5B/D
con f
reno
, sum
e 121
.5m
m (4
.78pu
lg.) a
las d
imen
sione
s L y
LB.
Si se
pide
n mot
ores
VPC-
B300
2x co
n fre
no, s
ume 4
7.5m
m (1
.87pu
lg.) a
las d
imen
sione
s L y
LB.
Si se
pide
n mot
ores
VPC-
B300
3x co
n fre
no, s
ume 9
5.0m
m (3
.74pu
lg.) a
las d
imen
sione
s L y
LB.
Si se
pide
n mot
ores
VPC-
B300
4x co
n fre
no, s
ume 1
42.5
mm
(5.61
pulg.
) a la
s dim
ensio
nes L
y LB
.
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 13
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
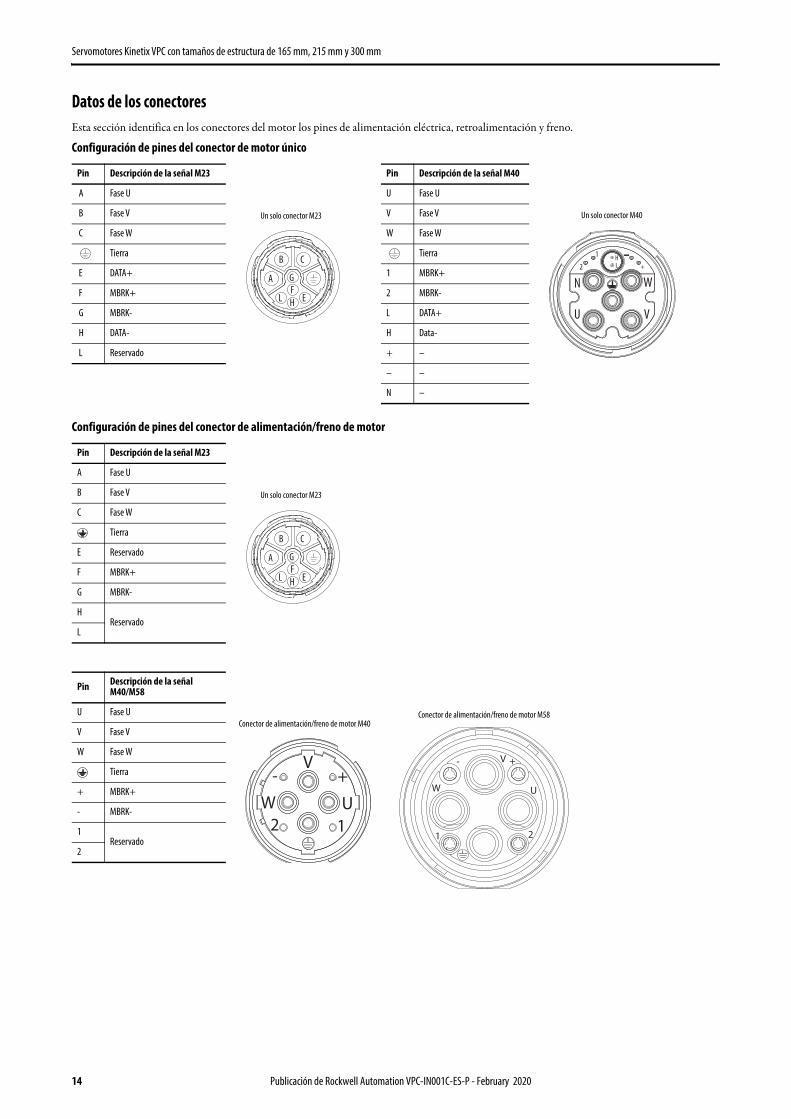
Datos de los conectoresEsta sección identifica en los conectores del motor los pines de alimentación eléctrica, retroalimentación y freno.
Configuración de pines del conector de motor único
Configuración de pines del conector de alimentación/freno de motor
Pin Descripción de la señal M23 Pin Descripción de la señal M40
A Fase U U Fase U
B Fase V V Fase V
C Fase W W Fase W
Tierra Tierra
E DATA+ 1 MBRK+
F MBRK+ 2 MBRK-
G MBRK- L DATA+
H DATA- H Data-
L Reservado + –
– –
N –
Pin Descripción de la señal M23
A Fase U
B Fase V
C Fase W
Tierra
E Reservado
F MBRK+
G MBRK-
HReservado
L
Pin Descripción de la señal M40/M58
U Fase U
V Fase V
W Fase W
Tierra
+ MBRK+
- MBRK-
1Reservado
2
A
B C
G
HL EF
Un solo conector M23
N
U V
WLH1
+2
Un solo conector M40
A
B C
G
HL EF
Un solo conector M23
Conector de alimentación/freno de motor M40
V
W U1
+-
2
W U
21
V +-
Conector de alimentación/freno de motor M58
14 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
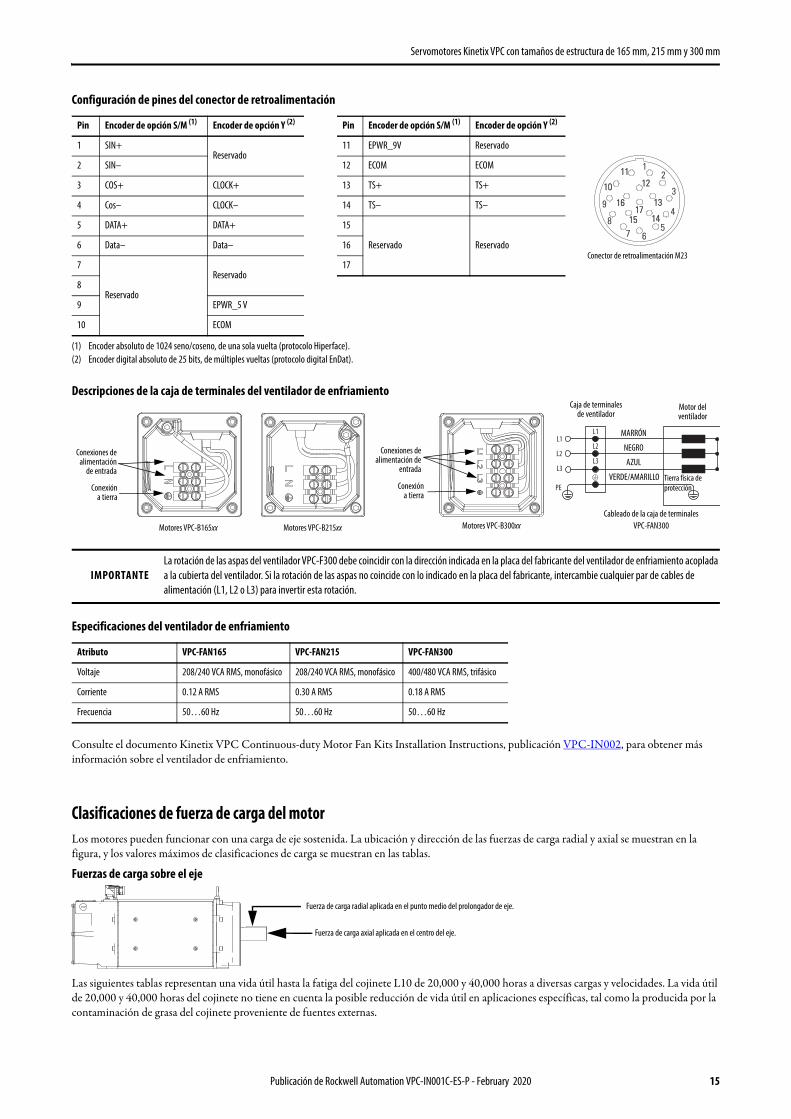
Configuración de pines del conector de retroalimentación
Descripciones de la caja de terminales del ventilador de enfriamiento
Especificaciones del ventilador de enfriamiento
Consulte el documento Kinetix VPC Continuous-duty Motor Fan Kits Installation Instructions, publicación VPC-IN002, para obtener más información sobre el ventilador de enfriamiento.
Clasificaciones de fuerza de carga del motorLos motores pueden funcionar con una carga de eje sostenida. La ubicación y dirección de las fuerzas de carga radial y axial se muestran en la figura, y los valores máximos de clasificaciones de carga se muestran en las tablas.
Fuerzas de carga sobre el eje
Las siguientes tablas representan una vida útil hasta la fatiga del cojinete L10 de 20,000 y 40,000 horas a diversas cargas y velocidades. La vida útil de 20,000 y 40,000 horas del cojinete no tiene en cuenta la posible reducción de vida útil en aplicaciones específicas, tal como la producida por la contaminación de grasa del cojinete proveniente de fuentes externas.
Pin Encoder de opción S/M (1)
(1) Encoder absoluto de 1024 seno/coseno, de una sola vuelta (protocolo Hiperface).
Encoder de opción Y (2)
(2) Encoder digital absoluto de 25 bits, de múltiples vueltas (protocolo digital EnDat).
Pin Encoder de opción S/M (1) Encoder de opción Y (2)
1 SIN+ Reservado
11 EPWR_9V Reservado
2 SIN– 12 ECOM ECOM
3 COS+ CLOCK+ 13 TS+ TS+
4 Cos– CLOCK– 14 TS– TS–
5 DATA+ DATA+ 15
Reservado Reservado 6 Data– Data– 16
7
Reservado
Reservado 17
8
9 EPWR_5 V
10 ECOM
IMPORTANTELa rotación de las aspas del ventilador VPC-F300 debe coincidir con la dirección indicada en la placa del fabricante del ventilador de enfriamiento acoplada a la cubierta del ventilador. Si la rotación de las aspas no coincide con lo indicado en la placa del fabricante, intercambie cualquier par de cables de alimentación (L1, L2 o L3) para invertir esta rotación.
Atributo VPC-FAN165 VPC-FAN215 VPC-FAN300
Voltaje 208/240 VCA RMS, monofásico 208/240 VCA RMS, monofásico 400/480 VCA RMS, trifásico
Corriente 0.12 A RMS 0.30 A RMS 0.18 A RMS
Frecuencia 50…60 Hz 50…60 Hz 50…60 Hz
12123
6
1515
12
4
57
8
9
1010
1111
1313
14141717
1616
Conector de retroalimentación M23
Motores VPC-B165xx Motores VPC-B215xx
Conexiones dealimentación
de entrada
Conexióna tierra
L1
PE
L2
L3
L1
L2
L3
Motores VPC-B300xx
Conexiones dealimentación de
entrada
Conexióna tierra
Cableado de la caja de terminales VPC-FAN300
Caja de terminales de ventilador
MARRÓN
NEGRO
AZUL
VERDE/AMARILLO
Motor del ventilador
Tierra física de protección
Fuerza de carga axial aplicada en el centro del eje.
Fuerza de carga radial aplicada en el punto medio del prolongador de eje.
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 15

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Servomotores Kinetix VPC (vida útil hasta la fatiga del cojinete de 20,000 horas)
Clasificaciones de fuerza de carga radial (máxima) para motores sin freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 2719(611.3)
2158(485.2)
1885(423.8)
1713(385.1)
1590(357.5)
1496(336.4)
1421(319.5)
1359(305.6)
1307(293.9) –
VPC-B1653A 4500 2871(645.5)
2279(512.3)
1991(447.6)
1809(406.6)
1679(377.5)
1580(355.2)
1501(337.4)
1436(322.7)
1380(310.3) –
VPC-B1652D 5000 2719(611.3)
2158(485.2)
1885(423.8)
1713(385.1)
1590(357.5)
1496(336.4)
1421(319.5)
1359(305.6)
1307(293.9)
1262(283.7)
VPC-B1653D 5000 2871(645.5)
2279(512.3)
1991(447.6)
1809(406.6)
1679(377.5)
1580(355.2)
1501(337.4)
1436(322.7)
1380(310.3)
1333(299.6)
VPC-B1654D 5000 2952(663.7)
2343(526.7)
2047(460.2)
1860(418.1)
1726(388.1)
1625(365.2)
1543(346.9)
1476(331.8)
1419(319.1)
1370(308.0)
VPC-B21539 3000 3763(846.1)
2987(671.5)
2609(586.6)
2371(533.0)
2201(494.8)
2071(465.6) – – – –
VPC-B21549 3000 3862(868.3)
3066(689.2)
2678(602.0)
2433(547.0)
2259(507.8)
2126(477.8) – – – –
VPC-B2153A 4500 3763(846.1)
2987(671.5)
2609(586.6)
2371(533.0)
2201(494.8)
2071(465.6)
1967(442.3)
1882(423.0)
1809(406.7) –
VPC-B2154A 4500 3862(868.3)
3066(689.2)
2678(602.0)
2433(547.0)
2259(507.8)
2126(477.8)
2019(453.9)
1931(434.1)
1857(417.4) –
VPC-B2154B 3200 3862(868.3)
3066(689.2)
2678(602.0)
2433(547.0)
2259(507.8)
2126(477.8) – – – –
VPC-B2154D 5000 3862(868.3)
3066(689.2)
2678(602.0)
2433(547.0)
2259(507.8)
2126(477.8)
2019(453.9)
1931(434.1)
1857(417.4)
1793(403.0)
VPC-B2155B 3200 3941(886.1)
3128(703.3)
2733(614.4)
2483(558.2)
2305(518.2)
2169(487.6) – – – –
VPC-B2155D 5000 3941(886.1)
3128(703.3)
2733(614.4)
2483(558.2)
2305(518.2)
2169(487.6)
2060(463.2)
1971(443.0)
1895(426.0)
1829(411.3)
VPC-B2156A 2800 4006(900.6)
3180(714.8)
2778(624.4)
2524(567.3)
2343(526.7) – – – – –
VPC-B2156D 5000 4006(900.6)
3180(714.8)
2778(624.4)
2524(567.3)
2343(526.7)
2205(495.6)
2094(470.8)
2003(450.3)
1926(433.0)
1859(418.0)
VPC-B30029 3000 5702(1282.0)
4526(1017.5)
3954(888.9)
3592(807.6)
3335(749.7)
3138(705.5) – – – –
VPC-B30039 3000 5702(1282.0)
4526(1017.5)
3954(888.9)
3592(807.6)
3335(749.7)
3138(705.5) – – – –
VPC-B30049 3000 5861(1317.7)
4652(1045.9)
4064(913.6)
3692(830.1)
3428(770.6)
3226(725.2) – – – –
VPC-B3002A 4000 5702(1282.0)
4526(1017.5)
3954(888.9)
3592(807.6)
3335(749.7)
3138(705.5)
2981(670.2)
2851(641.0) – –
VPC-B3003A 3500 5702(1282.0)
4526(1017.5)
3954(888.9)
3592(807.6)
3335(749.7)
3138(705.5)
2981(670.2) – – –
VPC-B3004A 3500 5861(1317.7)
4652(1045.9)
4064(913.6)
3692(830.1)
3428(770.6)
3226(725.2)
3064(688.8) – – –
VPC-B3004B 2800 5861(1317.7)
4652(1045.9)
4064(913.6)
3692(830.1)
3428(770.6) – – – – –
VPC-B3004D 4000 5861(1317.7)
4652(1045.9)
4064(913.6)
3692(830.1)
3428(770.6)
3226(725.2)
3064(688.8)
2931(658.8) – –
16 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Clasificaciones de fuerza de carga axial (carga radial máxima) para motores sin freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 927(208.4)
686(154.2)
575(129.3)
508(114.1)
461(103.6)
426(95.7)
398(89.5)
376(84.4)
357(80.2) –
VPC-B1653A 4500 927(208.4)
686(154.2)
575(129.3)
508(114.1)
461(103.6)
426(95.7)
398(89.5)
376(84.4)
357(80.2) –
VPC-B1652D 5000 927(208.4)
686(154.2)
575(129.3)
508(114.1)
461(103.6)
426(95.7)
398(89.5)
376(84.4)
357(80.2)
341(76.6)
VPC-B1653D 5000 927(208.4)
686(154.2)
575(129.3)
508(114.1)
461(103.6)
426(95.7)
398(89.5)
376(84.4)
357(80.2)
341(76.6)
VPC-B1654D 5000 927(208.4)
686(154.2)
575(129.3)
508(114.1)
461(103.6)
426(95.7)
398(89.5)
376(84.4)
357(80.2)
341(76.6)
VPC-B21539 3000 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5) – – – –
VPC-B21549 3000 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5) – – – –
VPC-B2153A 4500 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5)
514(115.5)
485(109.0)
460(103.5) –
VPC-B2154A 4500 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5)
514(115.5)
485(109.0)
460(103.5) –
VPC-B2154B 3200 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5) – – – –
VPC-B2154D 5000 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5)
514(115.5)
485(109.0)
460(103.5)
440(98.9)
VPC-B2155B 3200 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5) – – – –
VPC-B2155D 5000 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5)
514(115.5)
485(109.0)
460(103.5)
440(98.9)
VPC-B2156A 2800 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6) – – – – –
VPC-B2156D 5000 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5)
514(115.5)
485(109.0)
460(103.5)
440(98.9)
VPC-B30029 3000 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9) – – – –
VPC-B30039 3000 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9) – – – –
VPC-B30049 3000 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9) – – – –
VPC-B3002A 4000 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9)
782(175.7)
737(165.8) – –
VPC-B3003A 3500 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9)
782(175.7) – – –
VPC-B3004A 3500 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9)
782(175.7) – – –
VPC-B3004B 2800 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3) – – – – –
VPC-B3004D 4000 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9)
782(175.7)
737(165.8) – –
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 17
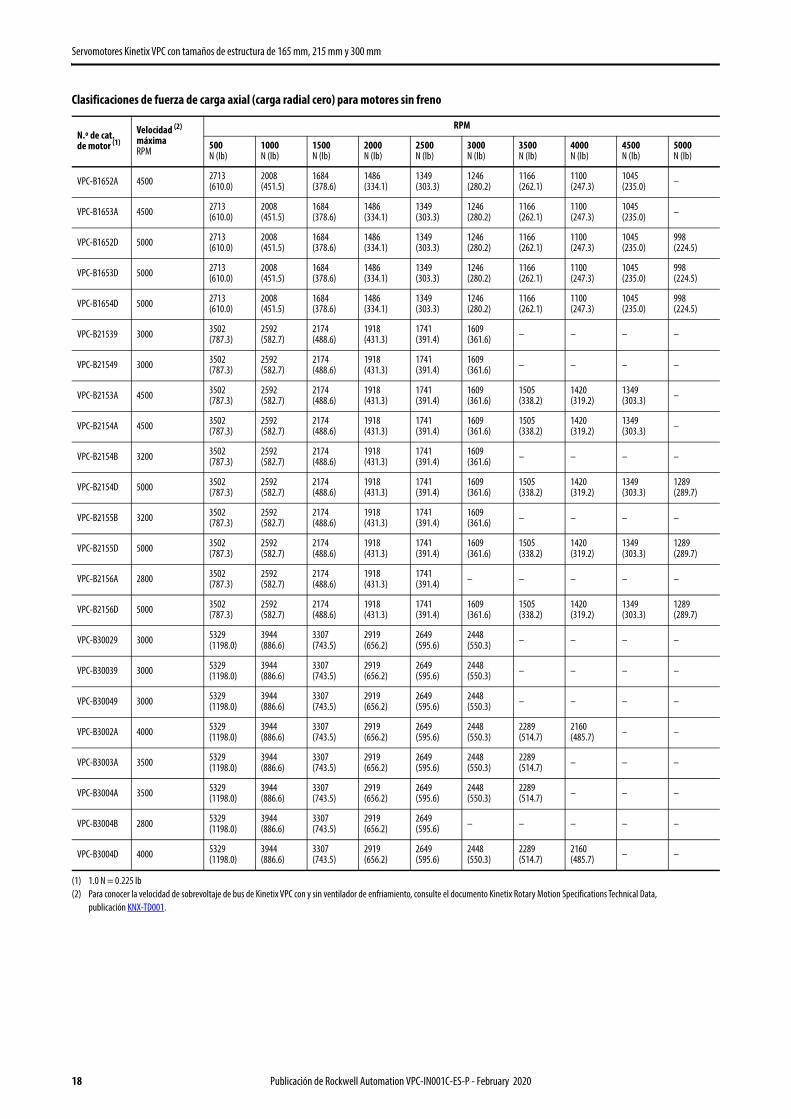
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Clasificaciones de fuerza de carga axial (carga radial cero) para motores sin freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 2713(610.0)
2008(451.5)
1684(378.6)
1486(334.1)
1349(303.3)
1246(280.2)
1166(262.1)
1100(247.3)
1045(235.0) –
VPC-B1653A 4500 2713(610.0)
2008(451.5)
1684(378.6)
1486(334.1)
1349(303.3)
1246(280.2)
1166(262.1)
1100(247.3)
1045(235.0) –
VPC-B1652D 5000 2713(610.0)
2008(451.5)
1684(378.6)
1486(334.1)
1349(303.3)
1246(280.2)
1166(262.1)
1100(247.3)
1045(235.0)
998(224.5)
VPC-B1653D 5000 2713(610.0)
2008(451.5)
1684(378.6)
1486(334.1)
1349(303.3)
1246(280.2)
1166(262.1)
1100(247.3)
1045(235.0)
998(224.5)
VPC-B1654D 5000 2713(610.0)
2008(451.5)
1684(378.6)
1486(334.1)
1349(303.3)
1246(280.2)
1166(262.1)
1100(247.3)
1045(235.0)
998(224.5)
VPC-B21539 3000 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6) – – – –
VPC-B21549 3000 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6) – – – –
VPC-B2153A 4500 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6)
1505(338.2)
1420(319.2)
1349(303.3) –
VPC-B2154A 4500 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6)
1505(338.2)
1420(319.2)
1349(303.3) –
VPC-B2154B 3200 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6) – – – –
VPC-B2154D 5000 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6)
1505(338.2)
1420(319.2)
1349(303.3)
1289(289.7)
VPC-B2155B 3200 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6) – – – –
VPC-B2155D 5000 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6)
1505(338.2)
1420(319.2)
1349(303.3)
1289(289.7)
VPC-B2156A 2800 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4) – – – – –
VPC-B2156D 5000 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6)
1505(338.2)
1420(319.2)
1349(303.3)
1289(289.7)
VPC-B30029 3000 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3) – – – –
VPC-B30039 3000 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3) – – – –
VPC-B30049 3000 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3) – – – –
VPC-B3002A 4000 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3)
2289(514.7)
2160(485.7) – –
VPC-B3003A 3500 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3)
2289(514.7) – – –
VPC-B3004A 3500 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3)
2289(514.7) – – –
VPC-B3004B 2800 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6) – – – – –
VPC-B3004D 4000 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3)
2289(514.7)
2160(485.7) – –
18 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020
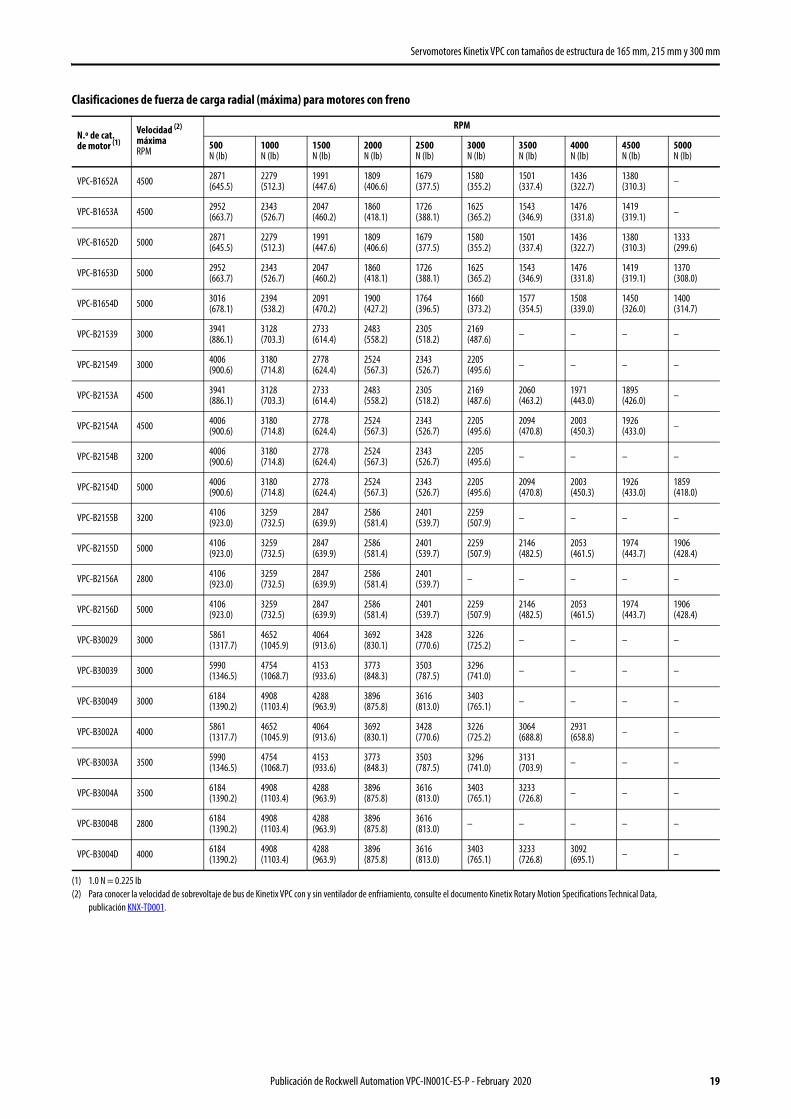
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Clasificaciones de fuerza de carga radial (máxima) para motores con freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 2871(645.5)
2279(512.3)
1991(447.6)
1809(406.6)
1679(377.5)
1580(355.2)
1501(337.4)
1436(322.7)
1380(310.3) –
VPC-B1653A 4500 2952(663.7)
2343(526.7)
2047(460.2)
1860(418.1)
1726(388.1)
1625(365.2)
1543(346.9)
1476(331.8)
1419(319.1) –
VPC-B1652D 5000 2871(645.5)
2279(512.3)
1991(447.6)
1809(406.6)
1679(377.5)
1580(355.2)
1501(337.4)
1436(322.7)
1380(310.3)
1333(299.6)
VPC-B1653D 5000 2952(663.7)
2343(526.7)
2047(460.2)
1860(418.1)
1726(388.1)
1625(365.2)
1543(346.9)
1476(331.8)
1419(319.1)
1370(308.0)
VPC-B1654D 5000 3016(678.1)
2394(538.2)
2091(470.2)
1900(427.2)
1764(396.5)
1660(373.2)
1577(354.5)
1508(339.0)
1450(326.0)
1400(314.7)
VPC-B21539 3000 3941(886.1)
3128(703.3)
2733(614.4)
2483(558.2)
2305(518.2)
2169(487.6) – – – –
VPC-B21549 3000 4006(900.6)
3180(714.8)
2778(624.4)
2524(567.3)
2343(526.7)
2205(495.6) – – – –
VPC-B2153A 4500 3941(886.1)
3128(703.3)
2733(614.4)
2483(558.2)
2305(518.2)
2169(487.6)
2060(463.2)
1971(443.0)
1895(426.0) –
VPC-B2154A 4500 4006(900.6)
3180(714.8)
2778(624.4)
2524(567.3)
2343(526.7)
2205(495.6)
2094(470.8)
2003(450.3)
1926(433.0) –
VPC-B2154B 3200 4006(900.6)
3180(714.8)
2778(624.4)
2524(567.3)
2343(526.7)
2205(495.6) – – – –
VPC-B2154D 5000 4006(900.6)
3180(714.8)
2778(624.4)
2524(567.3)
2343(526.7)
2205(495.6)
2094(470.8)
2003(450.3)
1926(433.0)
1859(418.0)
VPC-B2155B 3200 4106(923.0)
3259(732.5)
2847(639.9)
2586(581.4)
2401(539.7)
2259(507.9) – – – –
VPC-B2155D 5000 4106(923.0)
3259(732.5)
2847(639.9)
2586(581.4)
2401(539.7)
2259(507.9)
2146(482.5)
2053(461.5)
1974(443.7)
1906(428.4)
VPC-B2156A 2800 4106(923.0)
3259(732.5)
2847(639.9)
2586(581.4)
2401(539.7) – – – – –
VPC-B2156D 5000 4106(923.0)
3259(732.5)
2847(639.9)
2586(581.4)
2401(539.7)
2259(507.9)
2146(482.5)
2053(461.5)
1974(443.7)
1906(428.4)
VPC-B30029 3000 5861(1317.7)
4652(1045.9)
4064(913.6)
3692(830.1)
3428(770.6)
3226(725.2) – – – –
VPC-B30039 3000 5990(1346.5)
4754(1068.7)
4153(933.6)
3773(848.3)
3503(787.5)
3296(741.0) – – – –
VPC-B30049 3000 6184(1390.2)
4908(1103.4)
4288(963.9)
3896(875.8)
3616(813.0)
3403(765.1) – – – –
VPC-B3002A 4000 5861(1317.7)
4652(1045.9)
4064(913.6)
3692(830.1)
3428(770.6)
3226(725.2)
3064(688.8)
2931(658.8) – –
VPC-B3003A 3500 5990(1346.5)
4754(1068.7)
4153(933.6)
3773(848.3)
3503(787.5)
3296(741.0)
3131(703.9) – – –
VPC-B3004A 3500 6184(1390.2)
4908(1103.4)
4288(963.9)
3896(875.8)
3616(813.0)
3403(765.1)
3233(726.8) – – –
VPC-B3004B 2800 6184(1390.2)
4908(1103.4)
4288(963.9)
3896(875.8)
3616(813.0) – – – – –
VPC-B3004D 4000 6184(1390.2)
4908(1103.4)
4288(963.9)
3896(875.8)
3616(813.0)
3403(765.1)
3233(726.8)
3092(695.1) – –
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 19

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Clasificaciones de fuerza de carga axial (carga radial máxima) para motores con freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 927(208.4)
686(154.2)
575(129.3)
508(114.1)
461(103.6)
426(95.7)
398(89.5)
376(84.4)
357(80.2) –
VPC-B1653A 4500 927(208.4)
686(154.2)
575(129.3)
508(114.1)
461(103.6)
426(95.7)
398(89.5)
376(84.4)
357(80.2) –
VPC-B1652D 5000 927(208.4)
686(154.2)
575(129.3)
508(114.1)
461(103.6)
426(95.7)
398(89.5)
376(84.4)
357(80.2)
341(76.6)
VPC-B1653D 5000 927(208.4)
686(154.2)
575(129.3)
508(114.1)
461(103.6)
426(95.7)
398(89.5)
376(84.4)
357(80.2)
341(76.6)
VPC-B1654D 5000 927(208.4)
686(154.2)
575(129.3)
508(114.1)
461(103.6)
426(95.7)
398(89.5)
376(84.4)
357(80.2)
341(76.6)
VPC-B21539 3000 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5) – – – –
VPC-B21549 3000 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5) – – – –
VPC-B2153A 4500 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5)
514(115.5)
485(109.0)
460(103.5) –
VPC-B2154A 4500 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5)
514(115.5)
485(109.0)
460(103.5) –
VPC-B2154B 3200 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5) – – – –
VPC-B2154D 5000 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5)
514(115.5)
485(109.0)
460(103.5)
440(98.9)
VPC-B2155B 3200 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5) – – – –
VPC-B2155D 5000 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5)
514(115.5)
485(109.0)
460(103.5)
440(98.9)
VPC-B2156A 2800 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6) – – – – –
VPC-B2156D 5000 1196(269.0)
885(199.0)
742(166.9)
655(147.3)
594(133.6)
549(123.5)
514(115.5)
485(109.0)
460(103.5)
440(98.9)
VPC-B30029 3000 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9) – – – –
VPC-B30039 3000 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9) – – – –
VPC-B30049 3000 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9) – – – –
VPC-B3002A 4000 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9)
782(175.7)
737(165.8) – –
VPC-B3003A 3500 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9)
782(175.7) – – –
VPC-B3004A 3500 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9)
782(175.7) – – –
VPC-B3004B 2800 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3) – – – – –
VPC-B3004D 4000 1820(409.2)
1347(302.8)
1129(253.9)
997(224.1)
905(203.3)
836(187.9)
782(175.7)
737(165.8) – –
20 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Clasificaciones de fuerza de carga axial (carga radial cero) para motores con freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 2713(610.0)
2008(451.5)
1684(378.6)
1486(334.1)
1349(303.3)
1246(280.2)
1166(262.1)
1100(247.3)
1045(235.0) –
VPC-B1653A 4500 2713(610.0)
2008(451.5)
1684(378.6)
1486(334.1)
1349(303.3)
1246(280.2)
1166(262.1)
1100(247.3)
1045(235.0) –
VPC-B1652D 5000 2713(610.0)
2008(451.5)
1684(378.6)
1486(334.1)
1349(303.3)
1246(280.2)
1166(262.1)
1100(247.3)
1045(235.0)
998(224.5)
VPC-B1653D 5000 2713(610.0)
2008(451.5)
1684(378.6)
1486(334.1)
1349(303.3)
1246(280.2)
1166(262.1)
1100(247.3)
1045(235.0)
998(224.5)
VPC-B1654D 5000 2713(610.0)
2008(451.5)
1684(378.6)
1486(334.1)
1349(303.3)
1246(280.2)
1166(262.1)
1100(247.3)
1045(235.0)
998(224.5)
VPC-B21539 3000 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6) – – – –
VPC-B21549 3000 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6) – – – –
VPC-B2153A 4500 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6)
1505(338.2)
1420(319.2)
1349(303.3) –
VPC-B2154A 4500 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6)
1505(338.2)
1420(319.2)
1349(303.3) –
VPC-B2154B 3200 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6) – – – –
VPC-B2154D 5000 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6)
1505(338.2)
1420(319.2)
1349(303.3)
1289(289.7)
VPC-B2155B 3200 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6) – – – –
VPC-B2155D 5000 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6)
1505(338.2)
1420(319.2)
1349(303.3)
1289(289.7)
VPC-B2156A 2800 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4) – – – – –
VPC-B2156D 5000 3502(787.3)
2592(582.7)
2174(488.6)
1918(431.3)
1741(391.4)
1609(361.6)
1505(338.2)
1420(319.2)
1349(303.3)
1289(289.7)
VPC-B30029 3000 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3) – – – –
VPC-B30039 3000 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3) – – – –
VPC-B30049 3000 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3) – – – –
VPC-B3002A 4000 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3)
2289(514.7)
2160(485.7) – –
VPC-B3003A 3500 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3)
2289(514.7) – – –
VPC-B3004A 3500 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3)
2289(514.7) – – –
VPC-B3004B 2800 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6) – – – – –
VPC-B3004D 4000 5329(1198.0)
3944(886.6)
3307(743.5)
2919(656.2)
2649(595.6)
2448(550.3)
2289(514.7)
2160(485.7) – –
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 21
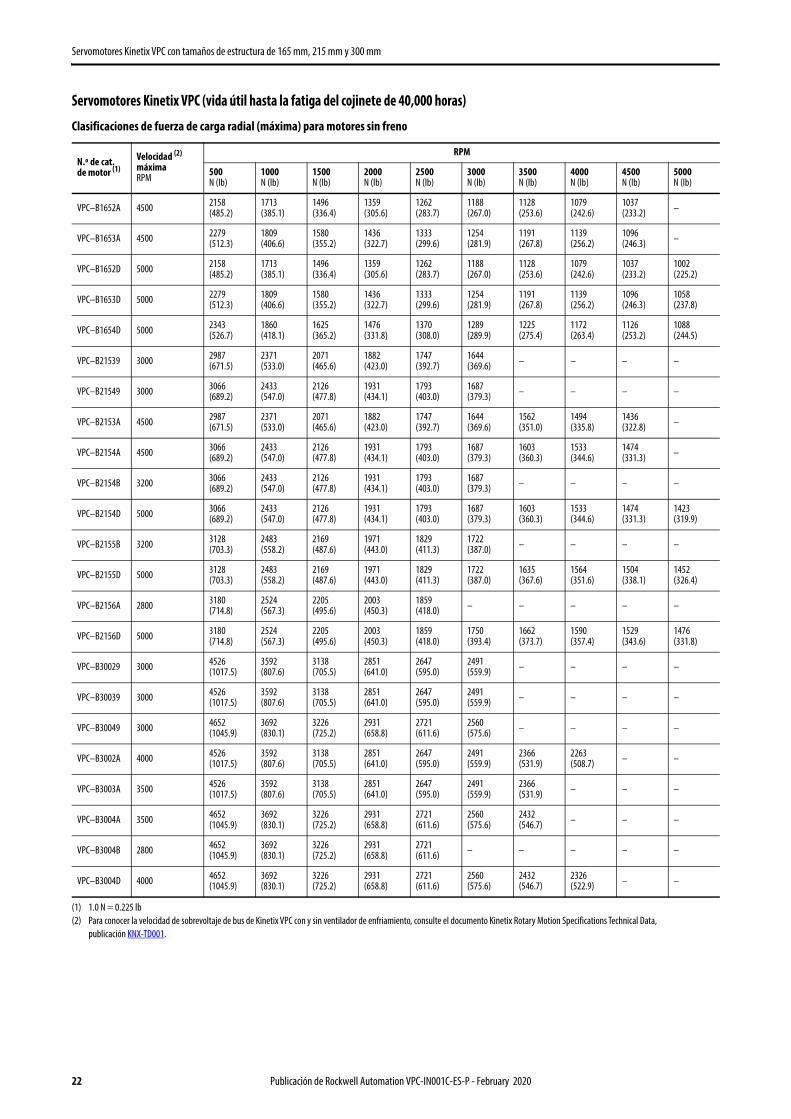
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Servomotores Kinetix VPC (vida útil hasta la fatiga del cojinete de 40,000 horas)
Clasificaciones de fuerza de carga radial (máxima) para motores sin freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC–B1652A 4500 2158(485.2)
1713(385.1)
1496(336.4)
1359(305.6)
1262(283.7)
1188(267.0)
1128(253.6)
1079(242.6)
1037(233.2) –
VPC–B1653A 4500 2279(512.3)
1809(406.6)
1580(355.2)
1436(322.7)
1333(299.6)
1254(281.9)
1191(267.8)
1139(256.2)
1096(246.3) –
VPC–B1652D 5000 2158(485.2)
1713(385.1)
1496(336.4)
1359(305.6)
1262(283.7)
1188(267.0)
1128(253.6)
1079(242.6)
1037(233.2)
1002(225.2)
VPC–B1653D 5000 2279(512.3)
1809(406.6)
1580(355.2)
1436(322.7)
1333(299.6)
1254(281.9)
1191(267.8)
1139(256.2)
1096(246.3)
1058(237.8)
VPC–B1654D 5000 2343(526.7)
1860(418.1)
1625(365.2)
1476(331.8)
1370(308.0)
1289(289.9)
1225(275.4)
1172(263.4)
1126(253.2)
1088(244.5)
VPC–B21539 3000 2987(671.5)
2371(533.0)
2071(465.6)
1882(423.0)
1747(392.7)
1644(369.6) – – – –
VPC–B21549 3000 3066(689.2)
2433(547.0)
2126(477.8)
1931(434.1)
1793(403.0)
1687(379.3) – – – –
VPC–B2153A 4500 2987(671.5)
2371(533.0)
2071(465.6)
1882(423.0)
1747(392.7)
1644(369.6)
1562(351.0)
1494(335.8)
1436(322.8) –
VPC–B2154A 4500 3066(689.2)
2433(547.0)
2126(477.8)
1931(434.1)
1793(403.0)
1687(379.3)
1603(360.3)
1533(344.6)
1474(331.3) –
VPC–B2154B 3200 3066(689.2)
2433(547.0)
2126(477.8)
1931(434.1)
1793(403.0)
1687(379.3) – – – –
VPC–B2154D 5000 3066(689.2)
2433(547.0)
2126(477.8)
1931(434.1)
1793(403.0)
1687(379.3)
1603(360.3)
1533(344.6)
1474(331.3)
1423(319.9)
VPC–B2155B 3200 3128(703.3)
2483(558.2)
2169(487.6)
1971(443.0)
1829(411.3)
1722(387.0) – – – –
VPC–B2155D 5000 3128(703.3)
2483(558.2)
2169(487.6)
1971(443.0)
1829(411.3)
1722(387.0)
1635(367.6)
1564(351.6)
1504(338.1)
1452(326.4)
VPC–B2156A 2800 3180(714.8)
2524(567.3)
2205(495.6)
2003(450.3)
1859(418.0) – – – – –
VPC–B2156D 5000 3180(714.8)
2524(567.3)
2205(495.6)
2003(450.3)
1859(418.0)
1750(393.4)
1662(373.7)
1590(357.4)
1529(343.6)
1476(331.8)
VPC–B30029 3000 4526(1017.5)
3592(807.6)
3138(705.5)
2851(641.0)
2647(595.0)
2491(559.9) – – – –
VPC–B30039 3000 4526(1017.5)
3592(807.6)
3138(705.5)
2851(641.0)
2647(595.0)
2491(559.9) – – – –
VPC–B30049 3000 4652(1045.9)
3692(830.1)
3226(725.2)
2931(658.8)
2721(611.6)
2560(575.6) – – – –
VPC–B3002A 4000 4526(1017.5)
3592(807.6)
3138(705.5)
2851(641.0)
2647(595.0)
2491(559.9)
2366(531.9)
2263(508.7) – –
VPC–B3003A 3500 4526(1017.5)
3592(807.6)
3138(705.5)
2851(641.0)
2647(595.0)
2491(559.9)
2366(531.9) – – –
VPC–B3004A 3500 4652(1045.9)
3692(830.1)
3226(725.2)
2931(658.8)
2721(611.6)
2560(575.6)
2432(546.7) – – –
VPC–B3004B 2800 4652(1045.9)
3692(830.1)
3226(725.2)
2931(658.8)
2721(611.6) – – – – –
VPC–B3004D 4000 4652(1045.9)
3692(830.1)
3226(725.2)
2931(658.8)
2721(611.6)
2560(575.6)
2432(546.7)
2326(522.9) – –
22 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020
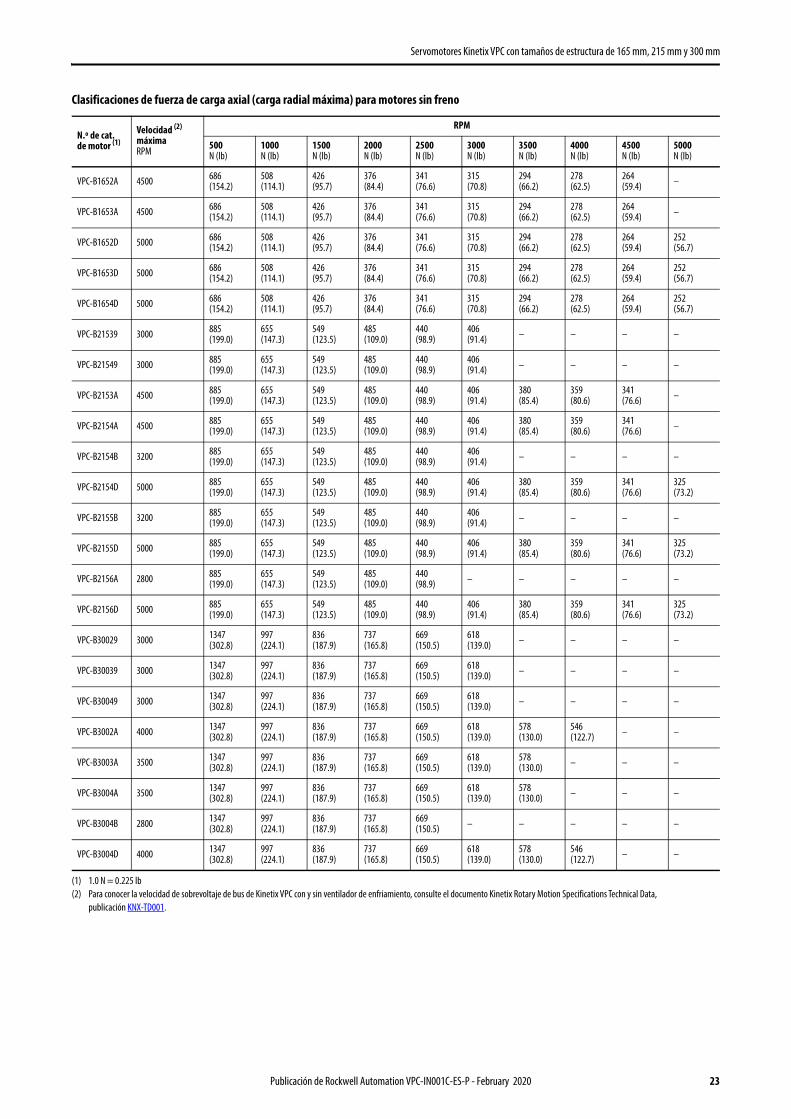
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Clasificaciones de fuerza de carga axial (carga radial máxima) para motores sin freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 686(154.2)
508(114.1)
426(95.7)
376(84.4)
341(76.6)
315(70.8)
294(66.2)
278(62.5)
264(59.4) –
VPC-B1653A 4500 686(154.2)
508(114.1)
426(95.7)
376(84.4)
341(76.6)
315(70.8)
294(66.2)
278(62.5)
264(59.4) –
VPC-B1652D 5000 686(154.2)
508(114.1)
426(95.7)
376(84.4)
341(76.6)
315(70.8)
294(66.2)
278(62.5)
264(59.4)
252(56.7)
VPC-B1653D 5000 686(154.2)
508(114.1)
426(95.7)
376(84.4)
341(76.6)
315(70.8)
294(66.2)
278(62.5)
264(59.4)
252(56.7)
VPC-B1654D 5000 686(154.2)
508(114.1)
426(95.7)
376(84.4)
341(76.6)
315(70.8)
294(66.2)
278(62.5)
264(59.4)
252(56.7)
VPC-B21539 3000 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4) – – – –
VPC-B21549 3000 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4) – – – –
VPC-B2153A 4500 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4)
380(85.4)
359(80.6)
341(76.6) –
VPC-B2154A 4500 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4)
380(85.4)
359(80.6)
341(76.6) –
VPC-B2154B 3200 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4) – – – –
VPC-B2154D 5000 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4)
380(85.4)
359(80.6)
341(76.6)
325(73.2)
VPC-B2155B 3200 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4) – – – –
VPC-B2155D 5000 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4)
380(85.4)
359(80.6)
341(76.6)
325(73.2)
VPC-B2156A 2800 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9) – – – – –
VPC-B2156D 5000 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4)
380(85.4)
359(80.6)
341(76.6)
325(73.2)
VPC-B30029 3000 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0) – – – –
VPC-B30039 3000 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0) – – – –
VPC-B30049 3000 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0) – – – –
VPC-B3002A 4000 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0)
578(130.0)
546(122.7) – –
VPC-B3003A 3500 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0)
578(130.0) – – –
VPC-B3004A 3500 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0)
578(130.0) – – –
VPC-B3004B 2800 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5) – – – – –
VPC-B3004D 4000 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0)
578(130.0)
546(122.7) – –
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 23

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Clasificaciones de fuerza de carga axial (carga radial cero) para motores sin freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 2008(451.5)
1486(334.1)
1246(280.2)
1100(247.3)
998(224.5)
922(207.4)
863(194.0)
814(183.0)
774(173.9) –
VPC-B1653A 4500 2008(451.5)
1486(334.1)
1246(280.2)
1100(247.3)
998(224.5)
922(207.4)
863(194.0)
814(183.0)
774(173.9) –
VPC-B1652D 5000 2008(451.5)
1486(334.1)
1246(280.2)
1100(247.3)
998(224.5)
922(207.4)
863(194.0)
814(183.0)
774(173.9)
739(166.1)
VPC-B1653D 5000 2008(451.5)
1486(334.1)
1246(280.2)
1100(247.3)
998(224.5)
922(207.4)
863(194.0)
814(183.0)
774(173.9)
739(166.1)
VPC-B1654D 5000 2008(451.5)
1486(334.1)
1246(280.2)
1100(247.3)
998(224.5)
922(207.4)
863(194.0)
814(183.0)
774(173.9)
739(166.1)
VPC-B21539 3000 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7) – – – –
VPC-B21549 3000 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7) – – – –
VPC-B2153A 4500 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7)
1114(250.3)
1051(236.2)
998(224.4) –
VPC-B2154A 4500 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7)
1114(250.3)
1051(236.2)
998(224.4) –
VPC-B2154B 3200 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7) – – – –
VPC-B2154D 5000 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7)
1114(250.3)
1051(236.2)
998(224.4)
954(214.4)
VPC-B2155B 3200 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7) – – – –
VPC-B2155D 5000 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7)
1114(250.3)
1051(236.2)
998(224.4)
954(214.4)
VPC-B2156A 2800 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7) – – – – –
VPC-B2156D 5000 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7)
1114(250.3)
1051(236.2)
998(224.4)
954(214.4)
VPC-B30029 3000 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3) – – – –
VPC-B30039 3000 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3) – – – –
VPC-B30049 3000 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3) – – – –
VPC-B3002A 4000 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3)
1694(380.9)
1599(359.4) – –
VPC-B3003A 3500 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3)
1694(380.9) – – –
VPC-B3004A 3500 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3)
1694(380.9) – – –
VPC-B3004B 2800 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8) – – – – –
VPC-B3004D 4000 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3)
1694(380.9)
1599(359.4) – –
24 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Clasificaciones de fuerza de carga radial (máxima) para motores con freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 2279(512.3)
1809(406.6)
1580(355.2)
1436(322.7)
1333(299.6)
1254(281.9)
1191(267.8)
1139(256.2)
1096(246.3) –
VPC-B1653A 4500 2343(526.7)
1860(418.1)
1625(365.2)
1476(331.8)
1370(308.0)
1289(289.9)
1225(275.4)
1172(263.4)
1126(253.2) –
VPC-B1652D 5000 2279(512.3)
1809(406.6)
1580(355.2)
1436(322.7)
1333(299.6)
1254(281.9)
1191(267.8)
1139(256.2)
1096(246.3)
1058(237.8)
VPC-B1653D 5000 2343(526.7)
1860(418.1)
1625(365.2)
1476(331.8)
1370(308.0)
1289(289.9)
1225(275.4)
1172(263.4)
1126(253.2)
1088(244.5)
VPC-B1654D 5000 2394(538.2)
1900(427.2)
1660(373.2)
1508(339.0)
1400(314.7)
1317(296.2)
1251(281.3)
1197(269.1)
1151(258.7)
1111(249.8)
VPC-B21539 3000 3128(703.3)
2483(558.2)
2169(487.6)
1971(443.0)
1829(411.3)
1722(387.0) – – – –
VPC-B21549 3000 3180(714.8)
2524(567.3)
2205(495.6)
2003(450.3)
1859(418.0)
1750(393.4) – – – –
VPC-B2153A 4500 3128(703.3)
2483(558.2)
2169(487.6)
1971(443.0)
1829(411.3)
1722(387.0)
1635(367.6)
1564(351.6)
1504(338.1) –
VPC-B2154A 4500 3180(714.8)
2524(567.3)
2205(495.6)
2003(450.3)
1859(418.0)
1750(393.4)
1662(373.7)
1590(357.4)
1529(343.6) –
VPC-B2154B 3200 3180(714.8)
2524(567.3)
2205(495.6)
2003(450.3)
1859(418.0)
1750(393.4) – – – –
VPC-B2154D 5000 3180(714.8)
2524(567.3)
2205(495.6)
2003(450.3)
1859(418.0)
1750(393.4)
1662(373.7)
1590(357.4)
1529(343.6)
1476(331.8)
VPC-B2155B 3200 3259(732.5)
2586(581.4)
2259(507.9)
2053(461.5)
1906(428.4)
1793(403.1) – – – –
VPC-B2155D 5000 3259(732.5)
2586(581.4)
2259(507.9)
2053(461.5)
1906(428.4)
1793(403.1)
1703(382.9)
1629(366.3)
1567(352.2)
1512(340.0)
VPC-B2156A 2800 3259(732.5)
2586(581.4)
2259(507.9)
2053(461.5)
1906(428.4) – – – – –
VPC-B2156D 5000 3259(732.5)
2586(581.4)
2259(507.9)
2053(461.5)
1906(428.4)
1793(403.1)
1703(382.9)
1629(366.3)
1567(352.2)
1512(340.0)
VPC-B30029 3000 4652(1045.9)
3692(830.1)
3226(725.2)
2931(658.8)
2721(611.6)
2560(575.6) – – – –
VPC-B30039 3000 4754(1068.7)
3773(848.3)
3296(741.0)
2995(673.3)
2780(625.0)
2616(588.2) – – – –
VPC-B30049 3000 4908(1103.4)
3896(875.8)
3403(765.1)
3092(695.1)
2870(645.3)
2701(607.2) – – – –
VPC-B3002A 4000 4652(1045.9)
3692(830.1)
3226(725.2)
2931(658.8)
2721(611.6)
2560(575.6)
2432(546.7)
2326(522.9) – –
VPC-B3003A 3500 4754(1068.7)
3773(848.3)
3296(741.0)
2995(673.3)
2780(625.0)
2616(588.2)
2485(558.7) – – –
VPC-B3004A 3500 4908(1103.4)
3896(875.8)
3403(765.1)
3092(695.1)
2870(645.3)
2701(607.2)
2566(576.8) – – –
VPC-B3004B 2800 4908(1103.4)
3896(875.8)
3403(765.1)
3092(695.1)
2870(645.3) – – – – –
VPC-B3004D 4000 4908(1103.4)
3896(875.8)
3403(765.1)
3092(695.1)
2870(645.3)
2701(607.2)
2566(576.8)
2454(551.7) – –
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 25

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Clasificaciones de fuerza de carga axial (carga radial máxima) para motores con freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 686(154.2)
508(114.1)
426(95.7)
376(84.4)
341(76.6)
315(70.8)
294(66.2)
278(62.5)
264(59.4) –
VPC-B1653A 4500 686(154.2)
508(114.1)
426(95.7)
376(84.4)
341(76.6)
315(70.8)
294(66.2)
278(62.5)
264(59.4) –
VPC-B1652D 5000 686(154.2)
508(114.1)
426(95.7)
376(84.4)
341(76.6)
315(70.8)
294(66.2)
278(62.5)
264(59.4)
252(56.7)
VPC-B1653D 5000 686(154.2)
508(114.1)
426(95.7)
376(84.4)
341(76.6)
315(70.8)
294(66.2)
278(62.5)
264(59.4)
252(56.7)
VPC-B1654D 5000 686(154.2)
508(114.1)
426(95.7)
376(84.4)
341(76.6)
315(70.8)
294(66.2)
278(62.5)
264(59.4)
252(56.7)
VPC-B21539 3000 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4) – – – –
VPC-B21549 3000 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4) – – – –
VPC-B2153A 4500 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4)
380(85.4)
359(80.6)
341(76.6) –
VPC-B2154A 4500 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4)
380(85.4)
359(80.6)
341(76.6) –
VPC-B2154B 3200 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4) – – – –
VPC-B2154D 5000 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4)
380(85.4)
359(80.6)
341(76.6)
325(73.2)
VPC-B2155B 3200 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4) – – – –
VPC-B2155D 5000 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4)
380(85.4)
359(80.6)
341(76.6)
325(73.2)
VPC-B2156A 2800 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9) – – – – –
VPC-B2156D 5000 885(199.0)
655(147.3)
549(123.5)
485(109.0)
440(98.9)
406(91.4)
380(85.4)
359(80.6)
341(76.6)
325(73.2)
VPC-B30029 3000 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0) – – – –
VPC-B30039 3000 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0) – – – –
VPC-B30049 3000 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0) – – – –
VPC-B3002A 4000 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0)
578(130.0)
546(122.7) – –
VPC-B3003A 3500 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0)
578(130.0) – – –
VPC-B3004A 3500 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0)
578(130.0) – – –
VPC-B3004B 2800 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5) – – – – –
VPC-B3004D 4000 1347(302.8)
997(224.1)
836(187.9)
737(165.8)
669(150.5)
618(139.0)
578(130.0)
546(122.7) – –
26 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Clasificaciones de fuerza de carga axial (carga radial cero) para motores con freno
N.º de cat. de motor (1)
(1) 1.0 N = 0.225 lb
Velocidad (2) máximaRPM
(2) Para conocer la velocidad de sobrevoltaje de bus de Kinetix VPC con y sin ventilador de enfriamiento, consulte el documento Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001.
RPM
500N (lb)
1000N (lb)
1500N (lb)
2000N (lb)
2500N (lb)
3000N (lb)
3500N (lb)
4000N (lb)
4500N (lb)
5000N (lb)
VPC-B1652A 4500 2008(451.5)
1486(334.1)
1246(280.2)
1100(247.3)
998(224.5)
922(207.4)
863(194.0)
814(183.0)
774(173.9) –
VPC-B1653A 4500 2008(451.5)
1486(334.1)
1246(280.2)
1100(247.3)
998(224.5)
922(207.4)
863(194.0)
814(183.0)
774(173.9) –
VPC-B1652D 5000 2008(451.5)
1486(334.1)
1246(280.2)
1100(247.3)
998(224.5)
922(207.4)
863(194.0)
814(183.0)
774(173.9)
739(166.1)
VPC-B1653D 5000 2008(451.5)
1486(334.1)
1246(280.2)
1100(247.3)
998(224.5)
922(207.4)
863(194.0)
814(183.0)
774(173.9)
739(166.1)
VPC-B1654D 5000 2008(451.5)
1486(334.1)
1246(280.2)
1100(247.3)
998(224.5)
922(207.4)
863(194.0)
814(183.0)
774(173.9)
739(166.1)
VPC-B21539 3000 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7) – – – –
VPC-B21549 3000 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7) – – – –
VPC-B2153A 4500 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7)
1114(250.3)
1051(236.2)
998(224.4) –
VPC-B2154A 4500 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7)
1114(250.3)
1051(236.2)
998(224.4) –
VPC-B2154B 3200 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7) – – – –
VPC-B2154D 5000 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7)
1114(250.3)
1051(236.2)
998(224.4)
954(214.4)
VPC-B2155B 3200 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7) – – – –
VPC-B2155D 5000 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7)
1114(250.3)
1051(236.2)
998(224.4)
954(214.4)
VPC-B2156A 2800 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7) – – – – –
VPC-B2156D 5000 2592(582.7)
1918(431.3)
1609(361.6)
1420(319.2)
1289(289.7)
1191(267.7)
1114(250.3)
1051(236.2)
998(224.4)
954(214.4)
VPC-B30029 3000 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3) – – – –
VPC-B30039 3000 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3) – – – –
VPC-B30049 3000 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3) – – – –
VPC-B3002A 4000 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3)
1694(380.9)
1599(359.4) – –
VPC-B3003A 3500 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3)
1694(380.9) – – –
VPC-B3004A 3500 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3)
1694(380.9) – – –
VPC-B3004B 2800 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8) – – – – –
VPC-B3004D 4000 3944(886.6)
2919(656.2)
2448(550.3)
2160(485.7)
1961(440.8)
1812(407.3)
1694(380.9)
1599(359.4) – –
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 27
Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Especificaciones ambientales
Cables de motor serie 2090Se necesitan cables de motor único serie 2090 con los servomotores VPC-Bxxxxx-Q. La -Q en el número de catálogo especifica motores que están equipados con un sensor de retroalimentación Hiperface DSL. Los cables de motor único están diseñados para aislar de manera eficaz la alimentación eléctrica y las señales de retroalimentación y de freno dentro del cable. Los cables de motor único están disponibles en longitudes estándar configurables, y proporcionan una terminación de blindaje a prueba de factores ambientales.
Se necesitan cables de retroalimentación y de alimentación de motores serie 2090 con los servomotores VPC-Bxxxxx-S, -M e -Y. Estos designadores indican encoders de una sola vuelta y de múltiples vueltas (Hiperface), y encoder EnDat de múltiples vueltas, respectivamente.
Comuníquese con la oficina regional de ventas de Rockwell Automation más cercana o consulte el documento Kinetix Motion Accessories Technical Data, publicación KNX-TD004, para conocer las especificaciones de los cables de motores serie 2090.
Kits de sellos de ejeHay disponibles kits de sellos de eje de repuesto para instalación en campo. Los sellos de eje son fabricados de nitrilo y los kits incluyen un lubricante para reducir el desgaste.
Números de catálogo de kits de sello de eje
Atributo Valor
Temperatura de funcionamiento –20…+40 °C (–4…+104 °F) (3)
(3) Para obtener esta clasificación térmica, monte el motor sobre una superficie con disipación de calor equivalente al tamaño de un disipador térmico de aluminio como se describe aquí:Estructuras de 165 mm y 215 mm, 304.8 x 304.8 x 12.7 mm (12 x 12 x 0.5 pulg.)Estructura de 300 mm, 533.4 x 533.4 x 25.4 mm (21 x 21 x 1 pulg.)
Temperatura de almacenamiento –30…+40 °C (-22…+104 F)
Humedad relativa de almacenamiento 5…90% sin condensación
Atmósfera de almacenamiento No corrosiva
Clasificación IP (1) del motor con sello de eje (2) y uso de conectores de cables a prueba de factores ambientales
(1) La clasificación IP se refiere al Código de Protección Internacional.(2) Se requiere el sello de eje Kinetix VPC incluido para conseguir la clasificación IP especificada para el motor. Una clasificación a nivel del sistema también depende de la clasificación IP del cable.
Consulte Recursos adicionales en la página 29 para obtener información sobre las instrucciones de instalación del reemplazo del sello de eje.
IP65 – Protección frente al polvo y los chorros a baja presión desde todas las direcciones
IMPORTANTELos sellos de eje están expuestos a desgaste, y requieren inspección y reemplazo periódicos. Se recomienda reemplazarlos cada 3 meses, o como máximo cada 12 meses, según el uso.
N.º de cat. de motor N.° de catálogo de kit de sellos de eje
VPC-B165xx MPL-SSN-A6B6
VPC-B215xx VPL-SS-X256
VPC-B300xx VPC-SSN-F300
28 Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020

Servomotores Kinetix VPC con tamaños de estructura de 165 mm, 215 mm y 300 mm
Recursos adicionales Los documentos que se indican a continuación incluyen información sobre productos relacionados de Rockwell Automation.
Puede ver o descargar publicaciones en http://www.rockwellautomation.com/global/literature-library/overview.page.
Recurso Descripción
Kinetix Rotary Motion Specifications Technical Data, publicación KNX-TD001 Proporciona las especificaciones de productos de los motores rotativos Allen-Bradley®, con información sobre rendimiento, especificaciones ambientales, certificaciones, fuerza de carga y esquemas de dimensiones.
Kinetix Motion Accessories Specifications, publicación KNX-TD004 Proporciona las especificaciones de productos y dimensiones de accesorios para servovariadores de Allen-Bradley.
Manual de usuario — Servovariadores Kinetix 5700, publicación 2198-UM002 Proporciona información sobre instalación, configuración, puesta en marcha y resolución de problemas de los sistemas de servovariadores Kinetix 5700.
Kinetix 5700 Drive System Design Guide, publicación KNX-RM010 Proporciona información sobre los componentes del sistema de variadores y componentes accesorios que necesitará para su combinación de variador/motor Kinetix 5700.
Instrucciones de instalación — Kits de sellos de eje, publicación 2090-IN012 Proporciona información sobre la instalación de un sello de eje en este y otros servomotores Allen-Bradley.
Kinetix VPC Continuous-duty Motor Fan Kits Installation Instructions, publicación VPC-IN002
Proporciona información sobre la instalación de kits de ventiladores de enfriamiento de repuesto para los servomotores Kinetix VPC.
Sitio web de certificaciones de productos,http://www.rockwellautomation.com/global/certification/overview.page Proporciona declaraciones de conformidad, certificados y otros detalles sobre las certificaciones.
Allen-Bradley Industrial Automation Glossary, publicación AG-7.1 Glosario de términos y abreviaturas de automatización industrial.
System Design for Control of Electrical Noise Reference Manual, publicación GMC-RM001 Información, ejemplos y técnicas diseñados para minimizar los fallos del sistema provocados por ruido eléctrico.
Publicación de Rockwell Automation VPC-IN001C-ES-P - February 2020 29
Rockwell Automation mantiene información medioambiental actualizada sobre sus productos en su sitio web en http://www.rockwellautomation.com/rockwellautomation/about-us/sustainability-ethics/product-environmental-compliance.page.
Para desechar este equipo al final de su vida útil, no se debe usar el servicio municipal de recolección de desechos no clasificados.
Servicio de asistencia técnica de Rockwell AutomationUse los recursos siguientes para consultar información de asistencia técnica.
Comentarios sobre la documentaciónSus comentarios nos ayudarán a atender mejor sus necesidades de documentación. Si tiene sugerencias para mejorar este documento, llene el formulario How Are We Doing? en http://literature.rockwellautomation.com/idc/groups/literature/documents/du/ra-du002_-en-e.pdf.
Centro de asistencia técnicaArtículos de la Knowledgebase, vídeos de procedimientos, preguntas frecuentes, chat, foros de usuarios y actualizaciones de notificaciones de productos.
https://rockwellautomation.custhelp.com/
Números de teléfono locales para asistencia técnica Encuentre el número de teléfono correspondiente a su país. http://www.rockwellautomation.com/global/support/get-support-now.page
Códigos de llamada directaEncuentre el código de llamada directa para su producto. Use el código para dirigir su llamada directamente a un ingeniero de asistencia técnica.
http://www.rockwellautomation.com/global/support/direct-dial.page
Literature Library Instrucciones de instalación, manuales, folletos y datos técnicos. http://www.rockwellautomation.com/global/literature-library/overview.page
Centro de compatibilidad y descarga de productos (PCDC)
Obtenga ayuda para determinar cómo interactúan los productos, conocer las características y capacidades de los productos, y encontrar el firmware correspondiente.
http://www.rockwellautomation.com/global/support/pcdc.page
Allen-Bradley, Kinetix, Rockwell Automation y Rockwell Software son marcas comerciales de Rockwell Automation, Inc.Las marcas comerciales que no pertenecen a Rockwell Automation son propiedad de sus respectivas empresas.
Publication VPC-IN001C-ES-P - February 2020Copyright © 2020 Rockwell Automation, Inc. Todos los derechos reservados. Impreso en EE. UU.


















