INTRODUCCIÓN - Blog de electrónica Electronicasi.com€¦ · currir a técnicas de control...
4
INTRODUCCIÓN Cada día es mas frecuente el uso de dis- positivos, circuitos, equipos y métodos electrónicos en la industria; con lo cual se ha conseguido automatizar muchos proce- sos, disponer de dispositivos de seguridad mas efectivos, y medir y controlar varia- bles con suma exactitud, tales como la tem- peratura, le presión, la velocidad, etc. Esto ha permitido la implantación de estrategias de control y supervisión de ope- raciones industriales mas eficientes, confiables y precisas, de las cuales se ob- tienen por ejemplo los siguientes benefi- cios: · Se minimiza la probabilidad de error, ya que el operario no debe intervenir físicamente en labores monótonas o pe- ligrosas, con lo cual, su función se li- mitará a la supervisión de vigilancia del proceso bien sea desde una sala de con- trol en la propia planta o desde centros de control remotos e incluso a través de Internet. · Se reducen significativamente los cos- tos y se mejora la calidad, ya que se pueden fabricar dispositivos de casi cualquier complejidad, muy uniformes y con muy pequeñas variaciones de sus características entre ellos, cosas que ob- tener mediante un control manual es sumamente complicado de lograr. · Se pueden ejecutar tareas que están fue- ra del alcance físico humano, como por ejemplo medir y controlar con preci- sión grandes fuerzas, presiones y tem- peraturas, o bien manipular objetos muy pesados o muy pequeños. Todos estos beneficios, entre otros tan- tos, son posibles gracias a que los siste- mas de control han sido diseñados para realizar tareas conservando los parámetros de un proceso dado, dentro de unos limi- tes o tolerancias específicas con un míni- mo de intervención humana. Tipos de Sistemas de control industrial Un sistema es simplemente una com- binación de elementos relacionados entre si, necesarios para realizar una o varias fun- ciones que ninguno podría hacer por si mismo. Este concepto no es exclusivo de los sistemas físicos como los de la indus- tria, ya que se aplica también a cualquier sistema abstracto y dinámico, tales como sistemas biológicos, químicos, económi- cos, etc. En el caso de un sistema de control, la función del mismo es mantener cualquier variable de interés, dentro de unos límites determinados, o alterarla de cierta manera deseada. Los sistemas de control pueden ser de lazo cerrado o de lazo abierto, de- pendiendo de si la variable controlada tie- ne o no efecto sobre la variable manipula- da. Los sistemas de control industrial, tan- to de lazo cerrado como de lazo abierto, están enfocados principalmente al control de procesos., los cuales están caracteriza- dos por una serie de pasos o cambios gra- duales que se suceden uno a continuación del otro, de manera relativamente fija y que conducen al objetivo buscado. Los procesos industriales son muy va- riados, dependiendo del tipo de producto que se quiere obtener al final, pero siem- pre en todos los casos, la función del sis- tema de control es permitir el manteni- miento y regulación de la variable contro- lada (temperatura, presión, caudal, velo- cidad, etc.) de una manera mas eficiente, rápida y confiable de cómo lo haría un ope- rario. Los sistemas de control pueden ser a su vez, continuos o discretos. — Discretos: En un proceso discreto, so- bre el producto que está siendo fabri- cado se ejecuta una secuencia de ope- raciones precisas. Este tipo de proceso son típicos de productos hechos de mezclas de ingredientes, incluyendo alimentos, petróleos, jabones, medica- mentos, etc. — Continuos: Permanentemente están entrando y saliendo materias primas de cada etapa y realizándose una o más operaciones de medida que pasa el pro- ducto. Ejemplos típicos de este tipo de proceso, son los textiles, las bolsas plás- ticas, el papel, etc. Elementos generales de los sistemas de control Los elementos generales que confor- man los sistemas de control son, el con- trolador del sistema, los actuadores, los controles del actuador, los sensores y las interfaces de señal, figura 1. El controlador del sistema proporcio- na la “inteligencia” para el sistema de con- trol. Su función primara es actuar como e, administrador de tiempos y de tráfico de señales del sistema, de modo que todas las funciones ocurran en el orden y el instante correctos. Este controlador puede ser un ordenados, un sistema microprocesado, un PLC, un conjunto de relés, etc. Los actuadores o transductores de sa- lida se comportan como los músculos del sistema de control, convirtiendo la poten- cia eléctrica aplicada a ellos en alguna for- ma de acción física. Algunos ejemplos de actuadores son los motores, los solenoides, las válvulas, etc. Los controles de los actuadores, como su nombre lo indica, controlan individual- mente la velocidad de motores, la apertu- ra o cierre de válvulas, la energización o desenergización de solenoides, etc. Los sensores o transductores de en- trada actúan como los sentidos del siste- ma de control, convirtiendo los parámetros a ser medidos, controlados o supervisados, en señales eléctricas equivalentes que pue- den ser interpretadas por el controlador. La salida de un sensor causa que el con- trolador active alguna forma de actuador para comenzar, terminar, regular o inte- rrumpir un proceso. Los sensores, actuadores y contro- ladores, operan todos sobre una gran va- 17 Figura 1
Transcript of INTRODUCCIÓN - Blog de electrónica Electronicasi.com€¦ · currir a técnicas de control...

INTRODUCCIÓNCada día es mas frecuente el uso de dis-
positivos, circuitos, equipos y métodoselectrónicos en la industria; con lo cual seha conseguido automatizar muchos proce-sos, disponer de dispositivos de seguridadmas efectivos, y medir y controlar varia-bles con suma exactitud, tales como la tem-peratura, le presión, la velocidad, etc.
Esto ha permitido la implantación deestrategias de control y supervisión de ope-raciones industriales mas eficientes,confiables y precisas, de las cuales se ob-tienen por ejemplo los siguientes benefi-cios:· Se minimiza la probabilidad de error,
ya que el operario no debe intervenirfísicamente en labores monótonas o pe-ligrosas, con lo cual, su función se li-mitará a la supervisión de vigilancia delproceso bien sea desde una sala de con-trol en la propia planta o desde centrosde control remotos e incluso a travésde Internet.
· Se reducen significativamente los cos-tos y se mejora la calidad, ya que sepueden fabricar dispositivos de casicualquier complejidad, muy uniformesy con muy pequeñas variaciones de suscaracterísticas entre ellos, cosas que ob-tener mediante un control manual essumamente complicado de lograr.
· Se pueden ejecutar tareas que están fue-ra del alcance físico humano, como porejemplo medir y controlar con preci-sión grandes fuerzas, presiones y tem-peraturas, o bien manipular objetosmuy pesados o muy pequeños.Todos estos beneficios, entre otros tan-
tos, son posibles gracias a que los siste-mas de control han sido diseñados pararealizar tareas conservando los parámetrosde un proceso dado, dentro de unos limi-tes o tolerancias específicas con un míni-mo de intervención humana.
Tipos de Sistemas decontrol industrial
Un sistema es simplemente una com-binación de elementos relacionados entresi, necesarios para realizar una o varias fun-ciones que ninguno podría hacer por simismo. Este concepto no es exclusivo delos sistemas físicos como los de la indus-tria, ya que se aplica también a cualquiersistema abstracto y dinámico, tales comosistemas biológicos, químicos, económi-cos, etc.
En el caso de un sistema de control, lafunción del mismo es mantener cualquiervariable de interés, dentro de unos límites
determinados, o alterarla de cierta maneradeseada. Los sistemas de control puedenser de lazo cerrado o de lazo abierto, de-pendiendo de si la variable controlada tie-ne o no efecto sobre la variable manipula-da.
Los sistemas de control industrial, tan-to de lazo cerrado como de lazo abierto,están enfocados principalmente al controlde procesos., los cuales están caracteriza-dos por una serie de pasos o cambios gra-duales que se suceden uno a continuacióndel otro, de manera relativamente fija y queconducen al objetivo buscado.
Los procesos industriales son muy va-riados, dependiendo del tipo de productoque se quiere obtener al final, pero siem-pre en todos los casos, la función del sis-tema de control es permitir el manteni-miento y regulación de la variable contro-lada (temperatura, presión, caudal, velo-cidad, etc.) de una manera mas eficiente,rápida y confiable de cómo lo haría un ope-rario.
Los sistemas de control pueden ser asu vez, continuos o discretos.— Discretos: En un proceso discreto, so-
bre el producto que está siendo fabri-cado se ejecuta una secuencia de ope-raciones precisas. Este tipo de procesoson típicos de productos hechos demezclas de ingredientes, incluyendoalimentos, petróleos, jabones, medica-mentos, etc.
— Continuos: Permanentemente estánentrando y saliendo materias primas decada etapa y realizándose una o másoperaciones de medida que pasa el pro-ducto. Ejemplos típicos de este tipo deproceso, son los textiles, las bolsas plás-ticas, el papel, etc.
Elementos generales de lossistemas de control
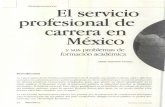
Los elementos generales que confor-man los sistemas de control son, el con-trolador del sistema, los actuadores, loscontroles del actuador, los sensores y lasinterfaces de señal, figura 1.
El controlador del sistema proporcio-na la “inteligencia” para el sistema de con-trol. Su función primara es actuar como e,administrador de tiempos y de tráfico deseñales del sistema, de modo que todas lasfunciones ocurran en el orden y el instantecorrectos. Este controlador puede ser unordenados, un sistema microprocesado, unPLC, un conjunto de relés, etc.
Los actuadores o transductores de sa-lida se comportan como los músculos delsistema de control, convirtiendo la poten-cia eléctrica aplicada a ellos en alguna for-ma de acción física. Algunos ejemplos deactuadores son los motores, los solenoides,las válvulas, etc.
Los controles de los actuadores, comosu nombre lo indica, controlan individual-mente la velocidad de motores, la apertu-ra o cierre de válvulas, la energización odesenergización de solenoides, etc.
Los sensores o transductores de en-trada actúan como los sentidos del siste-ma de control, convirtiendo los parámetrosa ser medidos, controlados o supervisados,en señales eléctricas equivalentes que pue-den ser interpretadas por el controlador.
La salida de un sensor causa que el con-trolador active alguna forma de actuadorpara comenzar, terminar, regular o inte-rrumpir un proceso.
Los sensores, actuadores y contro-ladores, operan todos sobre una gran va-
17
Figura 1

riedad de niveles y tipos de señales, a me-nudo incompatibles; por tanto deben em-plearse interfaces o circuitos de acondicio-namiento adecuados para convertir seña-les de un tipo a otro, llevar o transmitirseñales de un sitio a otro, aislar etapas en-tre si, etc.
Sistemas de control de lazoabierto y lazo cerrado.
Como dijimos anteriormente, los sis-temas de control pueden ser clasificadoscomo sistemas de lazo abierto o manua-les, o de lazo cerrado o automáticos.
Un sistema de control es de lazo abier-to cuando la variable de salida no afecta laacción de control. En otras palabras, no sesensa la salida (variable controlada) ni serealimenta para compararla con la entrada(señal de referencia o set point). Por tanto,no utiliza sensores y a cada entrada de re-ferencia le corresponde una condiciónoperativa fija. Como resultado de esto, laprecisión del sistema depende de la cali-bración del mismo. Este tipo de sistemasse utilizan en aplicaciones relativamentesencillas, donde no se requiere muchaexactitud.
Un sistema es de lazo cerrado cuandoutiliza elementos adicionales para medir osensar la variable de salida, realimentarlaprocesada a la entrada, compararla con laseñal de referencia y utilizar la diferencia(señal de error) para obtener la respuestade salida deseada. Por tanto, mantiene unarelación preestablecida entre la entrada yla salida, de modo que es capaz deautocorregirse en caso de una perturbaciónexterna.
La señal de realimentación o feedbackes producida a partir de un sensor que midela variable de salida y la convierte en unaseñal adecuada para ser procesada por elcontrolador del sistema y comparada conla señal de referencia. El sistema de la fi-gura 1, es de este tipo. Los sistemas de lazocerrado se denominan tambiénrealimentados o automáticos y son másutilizados en control industrial.
La realimentación puede ser positiva onegativa, dependiendo de si la señal derealimentación tiene o no la misma polari-dad de la señal de comando, es decir si lasdos señales se suman o restan para produ-cir la señal de error.
La realimentación negativa, llamadatambién feedback degenerativo, es la másutilizada en sistemas de control industria-les debido a su capacidad de autocorregirsecontinuamente y su habilidad para seguirla señal de referencia de una maneraconfiable, su capacidad de reaccionar antecambios o perturbaciones súbitas, y otrosefectos benéficos importantes.
La realimentación positiva, por su par-te, denominada también feedbackregenerativo, es rara vez utilizada en con-
trol industrial debido a que puede causarinestabilidad, es decir la pérdida del con-trol de la variable de salida por parte de laseñal de entrada.
Una variante de los sistemasrealimentados o de lazo cerrado, son lossistemas de control feedforward oanticipativos, en los cuales, como su nom-bre lo indica, previenen cualquier errorantes de que este ocurra. Sin embargo, estetipo de sistemas tienen algunas limitacio-nes que los hacen inherentemente inexac-tos; ya que por ejemplo, pueden existirperturbaciones no medibles difíciles dedetectar, como por ejemplo un sensor de-fectuoso, o la simple exactitud del calcu-lo. Además, muchos procesos tienen tiem-pos de respuesta muy largos; por estas ra-zones, el control feedforward es rara vezutilizado como tal en sistemas de controlindustriales. En su lugar se emplea com-binado con control realimetado convencio-nal. Así se consigue una mejor compensa-ción de las perturbaciones grandes y lostiempos de respuesta prolongados.
ANÁLISIS Y DISEÑO DE UNSISTEMA DE CONTROL
El primer y mas importante proceso enel análisis y diseño de un sistema de con-trol automático es desarrollar alguna for-ma de modelo matemático idealizado quedescriba, de la manera más aproximada ala realidad, el comportamiento de la plan-ta y permita predecirlo sin necesidad dedisponer del sistema físico como tal.
De todas maneras, debemos tener encuenta, que un modelo, no es mas que unaidealización de la realidad, con lo cual, estees inherentemente inexacto, puesto que sedeben hacer varias suposiciones para sim-plificarlo. Por esta razón, un sistema decontrol basado en un modelo debe ser di-señado de modo que tenga en cuenta to-dos los factores críticos necesarios paragarantizar el buen desempeño de la plantay sea capaz de acomodarse los factores operturbaciones no considerados o ignora-dos deliberadamente en su concepción ori-ginal.
DEFINICIÓN DE SISTEMASFÍSICOS
De acuerdo al comportamiento del sis-tema y a la forma del modelo matemáticoque lo describe, podemos definir nuestrosistema de algunas de las siguientes for-mas:· · · · · Sistema dinámico:
Su comportamiento solo puede ser des-crito mediante ecuaciones diferenciales. Sucontraparte son los sistemas estáticos, loscuales pueden ser representados medianteecuaciones algebraicas.· · · · · Sistema Lineal:
Sistema que puede ser representadomediante ecuaciones lineales. La mayoría
de los sistemas del mundo real, son sinembargo no lineales, pero se aproximan asistemas lineales dentro del rango de inte-rés para simplificar su análisis.· · · · · Sistema de parámetros concentrados
Sistema que puede ser representadomediante ecuaciones diferenciales o dediferencia ordinarias. Muchos sistemas sinembargo, son de parámetros distribui-dos, es decir, su comportamiento dependetanto del tiempo como del espacio y de-ben ser descritos mediante ecuaciones di-ferenciales parciales.· · · · · Sistema determinístico
Son sistemas cuyas entradas yparámetros se conocen exactamente, esdecir no son aleatorios. Su contraparte sonlos sistemas estocásticos, en los cuales, porlo menos una entrada o parámetro es afec-tado por perturbaciones no predecibles.· · · · · Sistema de tiempo continuo
Son aquellos sistemas que pueden serrepresentados mediante ecuaciones dife-renciales. La mayoría de los sistemas físi-cos son de este tipo Su contraparte, sonlos sistemas de tiempo discreto omuestreados, los cuales se representanmediante ecuaciones de diferencia. Es muyfrecuente, que sistemas lineales seandiscretizados, para poderlos controlar odiseñar utilizando un ordenador.· · · · · Sistema invariante en el tiempo
Sistema cuyos parámetros no varíancon el tiempo. Su contraparte son los sis-temas variantes en le tiempo.
DISEÑO DEL CONTROLADOR.Una vez ha sido desarrollado y verifi-
cado el modelo de la planta, el siguientepaso es diseñar el sistema d control de lamisma. Las opciones disponibles son muyvariadas, dependiendo de los objetivosbuscados, por ejemplo estabilidad, veloci-dad de respuesta, reducción de consumode energía, etc. Un primer enfoque es re-currir a técnicas de control clásico, basa-das en el análisis de el domino de la fre-cuencia, las cuales hacen uso extensivo dela transformada de Laplace para sistemascontinuos y de la transformada z para lossistemas discretos.
Estas técnicas clásicas son adecuadaspara sistemas con una entrada y una sali-da, sin embargo, pierden su solidez antesistemas de control con muchas entradasy salidas.
Cuando este es el caso, deben recurrirsea técnicas de control moderno, basadas enel análisis en el dominio del tiempo., lascuales hacen uso extensivo de los concep-tos de variables de estado, vector de esta-do, y espacio de estados.
Un nivel de sofisticación más avanza-do se consigue empleando técnicas de con-trol inteligente, los cuales son capaces po-tencialmente de proporcionar un nivel derobustez muy elevado, no obtenible con
18

otras técnicas de control. Estas técnicasestán basadas principalmente en el uso deredes neuronales artificiales y fuzzy logic(lógica difusa), e inspirada en modelos bio-lógicos de aprendizaje e inteligencia.
Naturalmente, existen otros enfoquesal diseño de sistemas de control, los cua-les incluyen técnicas como el controlpredictivo, el control de estructuras varia-bles y el control secuencial, etc.
EL CONTROLADOR PIDEl controlador PID, llamado así, por las
funciones que realiza (acciones de controlProporcionales, Integrales y Derivativas)es usado ampliamente en la mayoría delos procesos de control automáticos en laindustria de hoy. Los controladores PIDson confiables para el control de flujo, pre-sión, nivel y otra gran cantidad da varia-bles de procesos industriales.
Control ManualSin controladores automáticos, todas
las tareas de control deben ser hechas ma-
ajustar la válvula de control de gas conse-cuentemente. Si la temperatura del aguaempieza a elevarse, el operario deberá ce-rrar un poco la válvula, solo lo suficientepara lograr que el agua vuelva a la tempe-ratura deseada; de igual manera, si la tem-peratura del agua desciende, el operariodeberá abrir la válvula de gas de modo queaumente la temperatura solo lo necesariopara que el agua regrese al valor de tem-peratura seleccionado.
Control AutomáticoPara liberarnos del tedioso trabajo del
operario del anterior proceso de control,podemos automatizar este, instalando porejemplo un controlador PID. Este contro-lador tiene un punto de referencia o Setpoint, el cual el operario selecciona segúnla temperatura deseada. También tendre-mos que automatizar la válvula de controlinstalando un actuador (o quizás unposicionador) de modo que la salida delcontrolador pueda cambiar la posición dela válvula. Y para terminar, debemos pro-
Modelos de controlP, I y D.
Como vimos anteriormente, el contro-lador PID, tiene tres modos de control com-binados en uno solo; P, I y D. Cada uno deestos modos reacciona de una manera di-ferente al error y también el grado de ac-ción de control de cada uno de ellos se ajus-ta por separado.
Control proporcional (P)El modo de control proporcional, cam-
bia la salida del controlador en proporciónal error. La magnitud de esa proporción sedenomina Ganancia del Controlador (Kc),o constante proporcional P, y su compor-tamiento se pude expresar como:
C(t) = Kp e(t)Aunque la mayoría de los controladores
utilizan la ganancia del controlador (Kc)como parámetro proporcional, algunosotros emplean una Banda Proporcional(PB), la cual se expresa en porcentaje.
La tabla 1 muestra la relación entre Kcy PB.
El uso de un controlador únicamenteproporcional, tiene un gran inconvenientede offset (desvío). Este desvío, es un errorcontinuo, que no puede ser eliminado solocon un control proporcional, veamos porque.
Consideremos por ejemplo, un controlde nivel de agua en el tanque de la figura3, con un control proporcional.
Mientras el flujo de salida del tanquese mantenga constante, el nivel (el cual esnuestra variable del proceso en este caso)se mantendrá en su punto de referencia oSetPoint (SP).
Pero si el operario debe incrementar elflujo de salida del tanque, el nivel de esteempezará a descender, debido al desequi-librio entre el flujo de entrada y el de sali-da.
Mientras el nivel del tanque disminu-ye, el error aumenta, y nuestro controla-dor aumenta la salida de control propor-cional a este error (figura 4). Consecuen-temente, la válvula de entrada se abre, de
nualmente. Porejemplo: Paramantener cons-tante la tempera-tura del agua des-cargada de un ca-lentador indus-trial de gas, unoperario deberáestar pendientedel indicador detemperatura y
porcionarle al contro-lador una indicaciónde la temperatura ovariable del proceso,instalando un trans-misor de temperatura.
Así, cuando ya te-nemos todo montadoy trabajando, nuestrocontrolador PID com-para la variable delproceso con su puntode referencia y calcu-la la diferencia entrelas señales, entregán-donos la señal deerror.
Basándose en esteerror, debido a su es-tructura interna, elcontrolador propor-ciona la medida decontrol necesaria, queposiciona la válvulade control de modoque la temperatura semantenga siempre losmas cercana posible asu punto de referen-cia.19
Figura 2.

modo que mas flujo de agua entra al tan-que.
Como el nivel continua en descenso,la válvula continúa abierta hasta el puntoen el que el flujo de entrada alcanza el flu-jo de salida. En este momento, el nivel deltanque se mantiene constante y así lo haceel error. Entonces, debido a que el error semantiene constante, nuestro controlador P,mantendrá la salida constante y la válvulade control se mantendrá en esta posición.Como vemos, el sistema mantiene el ba-lance con el nivel del tanque por debajode su punto de referencia.
A este error residual se le conoce comooffset (desvío).
Con el controlador P, esta desviaciónse mantendrá hasta que el operario manual-mente altere la salida del controlador pararemoverla. Para eliminar la necesidad deque sea el operario quien “remueva” estadesviación, podemos entonces agregar unaacción de control integral, la cual se en-carga automáticamente de removerla.
Control Integral (I)Como dijimos anteriormente, el uso de
un controlador proporcional, siempre dejapor corregir un error.
La acción integral permite anular esteerror, haciendo que la señal de control C(t),crezca proporcionalmente al producto errorx tiempo
La acción integral se representa por unarampa, en la cual, la pendiente es determi-nada por el tamaño del error, la gananciadel controlador y el tiempo integral (Ti),también llamado parámetro I del contro-lador.
En la figura 5, podemos observar elmismo caso anterior, esta vez controladopor un controlador PI. Alli se observa,como la acción integral eleva los suficien-temente lejos la salida del controladorcomo para traer de nuevo el nivel a su pun-to de referencia.
Control derivativo (D)Las acciones de control proporciona-
les e integrales no permiten resolver com-pletamente todos los el problemas de con-trol. La primera deja un error permanentey la segunda podría causar inestabilidad oexceso de tiempo de respuesta. La acciónde control derivativa complementa la la-bor efectuada por las dos anteriores, ayu-dando a obtener un menor tiempo de res-puesta.
Así pues, el modo de control derivativoproduce una salida basado en la velocidadde cambio del error. Este tiene un
parámetro ajustable llamado Tiempoderivativo (Td), el cual es el parámetro Ddel controlador.
El control derivativo aparentemente tie-ne capacidades predictivas o anticipativas.Técnicamente esto no es verdad, pero sies cierto que un controlador PID propor-ciona una acción mucho mas temprana quela que podemos obtener con cualquier con-trol P o PI.
Si comparamos las figuras, podemosobservar que la inclusión de la acciónderivativa, reduce el tiempo que le lleva alnivel volver a su punto de referencia (SP).
Figura 3
Figura 4
Figura 5
Figura 6
20