Investigacion
25
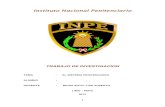
14. Taladradora Radial La taladradora radial guarda ciertas similitudes con el taladro de columna sin embargo el taladro radial tiene un husillo que puede girar alrededor de la columna y la cabeza puede colocarse a diferentes distancias. Esto permite taladrar en cualquier lugar de la pieza dentro del alcance de la máquina. Esta es la principal diferencia con el taladro de columna que mantiene una posición fija del husillo. Esta flexibilidad de sujetar el husillo en distintas posiciones hace del taladro radial una herramienta muy versátil y eficiente para perforar materiales grandes, facilitando el taladrado en distintos puntos de la pieza sin tener que volver a colocarla en distintas posiciones. El taladro radial es extremadamente preciso y permite hacer orificios de alta calidad desde diferentes ángulos. A diferencia de otros taladros, el taladro radial tiene la mesa de trabajo en la parte inferior, ya que esta diseñada para acomodar piezas grandes. Es una máquina de gran tamaño que mueve su cabezal, su mesa de trabajo y el husillo principal con motores independieres. El husillo se puede colocar para taladrar en cualquier lugar dentro del alcance de la máquina por medio de los movimientos proporcionados por la cabeza, el brazo y la rotación del brazo alrededor de la columna. Componentes básicos de un taladro radial
-
Upload
mary-carmen-retana -
Category
Documents
-
view
215 -
download
0
description
mecanismos
Transcript of Investigacion

14. Taladradora Radial
La taladradora radial guarda ciertas similitudes con el taladro de columna sin
embargo el taladro radial tiene un husillo que puede girar alrededor de la columna
y la cabeza puede colocarse a diferentes distancias. Esto permite taladrar en
cualquier lugar de la pieza dentro del alcance de la máquina. Esta es la principal
diferencia con el taladro de columna que mantiene una posición fija del husillo.
Esta flexibilidad de sujetar el husillo en distintas posiciones hace del taladro radial
una herramienta muy versátil y eficiente para perforar materiales grandes,
facilitando el taladrado en distintos puntos de la pieza sin tener que volver a
colocarla en distintas posiciones. El taladro radial es extremadamente preciso y
permite hacer orificios de alta calidad desde diferentes ángulos.
A diferencia de otros taladros, el taladro radial tiene la mesa de trabajo en la parte
inferior, ya que esta diseñada para acomodar piezas grandes. Es una máquina de
gran tamaño que mueve su cabezal, su mesa de trabajo y el husillo principal con
motores independieres. El husillo se puede colocar para taladrar en cualquier lugar
dentro del alcance de la máquina por medio de los movimientos proporcionados
por la cabeza, el brazo y la rotación del brazo alrededor de la columna.
Componentes básicos de un taladro radial
• Base: Sirve como apoyo de la máquina y también de soporta a la pieza durante
el proceso de taladro.
• Columna: Pieza de forma tubular que puede girar alrededor de otra columna fija
sujeta a la base.
• Brazo: Soporta todo el peso del cabezal y del motor. Se puede mover de forma
vertical sobre la columna y fijarse a una determinada altura.
• Cabezal: Contiene todos los engranajes para poder realizar el avance y
desarrollar la velocidad de la broca. Puede deslizarse sobre el brazo para ser
fijado a distintas distancias de la columna.

Imagen 1: Taladro radial
Imagen 2: Grados de libertad taladro radial (3)

15. Mecanismo del limpia parabrisas de un automóvil (Biela – manivela)
Limpiaparabrisas.
Dispositivo que se adapta a los automóviles en la parte exterior del parabrisas y
que, moviéndose de un lado a otro, aparta la lluvia, la nieve o basura que cae
sobre él. La gran mayoría de los automóviles están provistos de limpiaparabrisas
que habitualmente son llamado de forma incorrecta como parabrisas. Algunos
autos tienen un dispositivo parecido para limpiar los focos delanteros.
Principio de funcionamiento
El dispositivo consiste en un brazo (rasqueta), que puede girar en torno a uno de
sus extremos y con un largo borde de goma (escobilla o plumilla) adosado a uno
de sus lados es movido en sentido oscilatorio sobre el vidrio. Por lo general es
posible modificar la velocidad, con varias velocidades predefinidas y una
intermitente para condiciones en que la lluvia es escasa.
El movimiento pendular u oscilante de escobilla o plumilla que se usa para hacer
barrer el cristal del parabrisas, se obtiene por un motor de vacío que utiliza como
energía el de la tubería de admisión, o bien mediante un motorcillo eléctrico
alimentado por la corriente de la batería. A veces el juego de dos raqueta que
suelen llevar los coches a lo ancho del parabrisas funcionan sincronizadas. En
algunos casos cada rasqueta tiene su motorcito propio y funcionan independientes
una de otra. Algunos vehículos poseen un dispositivo similar de sólo un brazo y
más pequeño ubicado en la parte trasera, el cual se le conoce como
limpiaparabrisas trasero.

Imagen 3: Grados de libertad mecanismo limpiaparabrisas (1)
Imagen 4: mecanismo limpiaparabrisas

16. Cizalla o Guillotina Mecánica
Las guillotinas consisten en una mesa de plano horizontal, a veces inclinado,
donde se coloca el material para ser cortado por una cuchilla de movimiento
vertical accionada mecánicamente o por pedal.
MEDIOS DE PROTECCIÓN
Es necesario disponer de una protección para evitar el acceso al borde de corte de
una cuchilla en ambos tipos de máquinas. El uso de un resguardo fijo o ajustable
es preferible, aunque también se utilizan resguardos de enclavamiento donde no
es posible montar defensas fijas. No es conveniente que exista ningún acceso
posible al borde de corte por encima de la defensa, desde sus laterales, ni por
debajo de ella. Si fuera posible llegar al borde posterior de la cuchilla, este acceso
debería evitarse. Una máquina a veces se alimenta desde la parte posterior con
un operario que deja los fragmentos en la parte frontal. Ambas posiciones deben
ser seguras, siendo necesaria una defensa para la parte posterior y otra para la
parte frontal de la máquina.
Cuando una guillotina mecánica está equipada con una brida, los resguardos
deben prever el posible atrapamiento con las patas de la brida.
Las cizallas de tijera que trabajan continuamente son difíciles de proteger debido a
la naturaleza de su trabajo, y debe tenerse gran cuidado al trabajar con cuchillas
sin proteger.

Imagen 5: Cizalla o guillotina mecánica

Imagen 6: Cizalla o guillotina mecánica grados de libertad (1)
Imagen 7: Cizalla o guillotina mecánica funcionamiento

17. Brazo robot industrial para soldar bastidores de automóviles (sin considerar gripper)
Entre los robots considerados de más utilidad en la actualidad se encuentran los
robots industriales o manipuladores. Existen ciertas dificultades a la hora de
establecer una definición formal de lo que es un robot industrial. La primera de
ellas surge de la diferencia conceptual entre el mercado japonés y el euro-
americano de lo que es un robot y lo que es un manipulador. Así, mientras que
para los japoneses un robot industrial es cualquier dispositivo mecánico dotado de
articulaciones móviles destinado a la manipulación, el mercado occidental es más
restrictivo, exigiendo una mayor complejidad, sobre todo en lo relativo al control.
En segundo lugar, y centrándose ya en el concepto occidental, aunque existe una
idea común acerca de lo que es un robot industrial, no es fácil ponerse de acuerdo
a la hora de determinar una definición formal. Además, la evolución de la robótica
ha ido obligando a diferentes actualizaciones de su definición.
La definición más comúnmente aceptada posiblemente sea la de la Asociación de
Industrias de Robótica (RIA, Robotic Industry Association), según la cual:
"Un robot industrial es un manipulador multifuncional reprogramable, capaz de
mover materias, piezas, herramientas, o dispositivos especiales, según
trayectorias variables, programadas para realizar tareas diversas"
Esta definición, ligeramente modificada, ha sido adoptada por la Organización
Internacional de Estándares (ISO) que define al robot industrial como:
"Manipulador multifuncional reprogramable con varios grados de libertad, capaz de
manipular materias, piezas, herramientas o dispositivos especiales según
trayectorias variables programadas para realizar tareas diversas"

A los manipuladores robóticos se les suele denominar también brazos de robot por
la analogía que se puede establecer, en muchos casos, con las extremidades
superiores del cuerpo humano.
Imagen 8: Semejanza de un brazo manipulador con la anatomía humana
Grados de libertad (GDL)
Cada uno de los movimientos independientes (giros y desplazamientos) que
puede realizar cada articulación con respecto a la anterior. Son los parámetros
que se precisan para determinar la posición y la orientación del elemento terminal
del manipulador. El número de grados de libertad del robot viene dado por la suma
de los GDL de las articulaciones que lo componen. Puesto que las articulaciones

empleadas suelen ser únicamente de rotación y prismáticas, con un solo grado de
libertad cada una, el número de GDL del robot suele coincidir con el número de
articulaciones que lo componen. Puesto que para posicionar y orientar un cuerpo
de cualquier manera en el espacio son necesarios seis parámetros, tres para
definir la posición y tres para la orientación, si se pretende que un robot posicione
y oriente su extremo (y con él la pieza o herramienta manipulada) de cualquier
modo en el espacio, se precisará al menos seis grados de libertad.
Imagen 9: Robot industrial (sin considerar gripper). Grados de libertad (6)
A la muñeca de un manipulador le corresponden los siguientes movimientos o
grados de libertad: giro (hand rotate), elevación (wrist flex) y desviación (wrist
rotate) como lo muestra el modelo inferior, aunque cabe hacer notar que existen
muñecas que no pueden realizar los tres tipos de movimiento.
18. Diferencial de un automóvil
Funcionamiento del Mecanismo Diferencial
La función del diferencial es dividir por igual el par del motor y pasarlo al mismo
tiempo a los ejes laterales. Este sistema permite que se tengan velocidades

diferentes en los ejes de salida si se necesita. Esto se da gracias a que los
engranes de los semiejes pueden girar a velocidades diferentes ya que los
piñones pueden girar sus ejes permitiendo que uno de los semiejes gire con más
rapidez que el otro.
El diferencial reduce la velocidad de rotación transmitida desde la transmisión e
incrementa la fuerza de movimiento, así como también distribuye la fuerza de
movimiento en la dirección izquierda y derecha transmitiendo este movimiento a
los ejes.
Su uso principal se da en los automóviles permitiendo que cuando el vehículo está
girando, el diferencial absorbe las diferencias de rotación del movimiento de las
ruedas izquierdas y derechas, haciendo esto posible que el vehículo gire
fácilmente.
Imagen 10: Engranaje Diferencial, grados de libertad (2)
Debido a que este tipo de mecanismo es principalmente ocupado en la industria
automotriz hace necesario que para comprender su funcionamiento de forma más

completa y fácil se haga referencia al uso que tiene el diferencial en un automóvil
de esta forma el funcionamiento queda ejemplificado como sigue.
Cuando el vehículo va en línea recta el eje secundario de la caja de cambios
mueve el piñón de ataque, éste la corona, y ésta arrastra la caja de satélites que
está unida solidariamente a ella. Los ejes de los satélites al estar unidos a la caja
giran arrastrando a los planetarios, y por tanto, a través de los semiejes y la
reducción final, hacen girar las ruedas. Los planetarios giran en el mismo sentido y
velocidad que la corona mientras el vehículo marcha en línea recta.
Cuando el vehículo toma una curva, la rueda interior ofrece más resistencia al giro
que la exterior, ya que ésta última no puede moverse a la misma velocidad por
tener que recorrer un camino mayor. Al quedar frenada la rueda, frena también el
movimiento de su planetario correspondiente y entonces los satélites tienden a
rodar sobre él, multiplicando el giro en la otra rueda. De esta forma, lo que pierde
en giro una rueda lo gana en la otra, ajustándose así automáticamente el giro en
cada una de ellas por la acción compensatoria de los satélites. Cuando con el
freno individual se frena una rueda, ésta se detiene totalmente y automáticamente
la otra pasa a dar el doble de vueltas.
Los vehículos con tracción en las ruedas delanteras y traseras, llevan dos
diferenciales, el principal inconveniente del diferencial es que si una rueda pierde
adherencia con el suelo, gira con velocidad doble que la corona, mientras que la
otra se queda inmóvil. Este caso puede darse en zonas con hielo, barro, etc. Para
solucionar este problema, los vehículos llevan un mecanismo de bloqueo del
diferencial, que permite anular su función y obliga a las dos ruedas a ir a la
misma velocidad. Este bloqueo debe utilizarse únicamente para resolver ese tipo
de situaciones pues en otro caso puede originar averías en el diferencial y hasta el
vuelco del vehículo si éste intenta girar.

Imagen 11: Diferencial automóvil grados de libertad (2)
NOTA.- El diferencial es un mecanismo con dos grados de libertad, al tener una
única relación que liga a las tres variables entrada-salida del mecanismo, es decir
se pueden fijar dos de ellas libremente y ya queda determinada la tercera o bien si
se fija una de ellas existe una relación entre las otras dos.
19. Gato Hidráulico
El funcionamiento del gato hidráulico responde al principio de Pascal, que
establece que la presión en un contenedor cerrado es siempre la misma en todos
sus puntos.
Se le da el nombre de gato “hidráulico” por la utilización de un líquido,
generalmente un aceite, para ejercer presión sobre un cilindro que empujará a otro
de diferente tamaño para lograr la elevación del brazo.
Cuando el fluido, que en este caso en un aceite, es impulsado hacia un cilindro por
acción de una bomba, se somete a una fuerza como la presión.
Para ejercer la presión se “inyecta” aire al aceite para desplazarlo y el cilindro de
menor tamaño empujará al de mayor tamaño. Así, la presión ejercida sobre el

primero será igual en el segundo, con la diferencia de que el mayor tamaño de
éste logrará un incremento de la fuerza para que el brazo lleve a cabo la
elevación.
Esta forma de trabajar del gato hidráulico es muy similar a la que tiene una jeringa
que impulsa su contenido por acción de la presión a la que es sometido.
La presión del aceite permite que el brazo del gato hidráulico se eleve a una
determinada altura, esto permitirá maniobrar debajo del aparato o cuerpo que se
quiera elevar.
Los gatos hidráulicos cuentan con un seguro que impedirá la entrada del aire si no
se está utilizando el gato o que la facilitarán para invertir el proceso y hacer que
descienda el brazo.
Las partes del gato hidráulico
En general, los gatos hidráulicos constan de las siguientes partes:
- Depósito: Es el lugar donde se contiene el aceite o fluido.
- Bomba: Crea la presión para mover el aceite.
- Válvula de retención: Permite que el líquido llegue al cilindro principal.
- Cilindro principal: Recibe la presión del fluido y empuja al cilindro secundario.
- Cilindro secundario: Acciona el brazo de elevación.
- Brazo de elevación: Como su nombre indica, eleva el cuerpo que se le coloca
encima.
- Válvula de liberación: Libera el aire para liberar la presión y revertir el proceso de
elevación.

Imagen 12: Gato hidráulico grados de libertad (1)
20. Mecanismo de un freno de tambor automotriz
El freno de tambor es un sistema que aplica la fuerza de frenado usando material
de fricción que es empujado contra la superficie interior de un tambor que gira
conjuntamente con el neumático. Una gran fuerza de frenado puede ser obtenida
comparativamente con una pequeña fuerza de presión en el pedal.

Imagen 13: Freno de tambor
Cilindro de Rueda
Este cilindro convierte la presión hidráulica del cilindro maestro en una fuerza que
mueve la zapata de freno.
Imagen 14: Cilindro de rueda

Zapata de Freno y Forro de Zapata de Freno
La zapata de freno tiene la misma forma circular como el tambor de freno y tiene
un forro de zapata de freno (material de fricción) fijado a su circunferencia exterior.
El forro de la zapata de freno es un material de fricción que obtiene fuerza de
frenado de la fricción entre este y el tambor de freno cuando este rota. Materiales
con excelente resistencia al calor y resistencia al desgaste son usados.
Imagen 15: Zapata de Freno

Tambor de Freno
El tambor de freno es hecho de hierro fundido. Hay una pequeña holgura
establecida entre el tambor y el forro de la zapata. El tambor de freno rota
juntamente con el neumático. Cuando los frenos son aplicados, el forro de zapata
de freno es empujado contra el interior del tambor, estableciendo la fricción que
genera la fuerza de frenado.
Imagen 16: Freno de tambor, grados de libertad (1)
Imagen 17: Freno de tambor, activación de las zapatas de freno a través del cilindro de rueda, y del pedal de freno, grados de libertad (1)

Palanca de Ajuste (Mecanismo de Auto Ajuste)
Este es un mecanismo que ajusta la luz entre el tambor de freno y el forro de la
zapata de freno automáticamente, corrigiendo la holgura tanto como sea necesario
cuando el freno de estacionamiento es operado.
Bibliografía:Taladros y Brocas. 2009. Taladros Radiales. Visitado el 20 de abril de 2012 del sitio web:
http://taladrosybrocas.com/taladros-radiales-c/
http://www.sprl.upv.es/iop_pm_44.htm#punto1
http://platea.pntic.mec.es/vgonzale/cyr_0708/archivos/_15/Tema_5.4.htm
http://wikifab.dimf.etsii.upm.es/wikifab/index.php/
Usuario:1485_11999#Grados_de_libertad_de_un_robot
http://www.juntadeandalucia.es/averroes/iesalfonso_romero_barcojo/departamentos/
tecnologia/unidades_didacticas/ud_controlroboticav1/morfologia%20de%20un%20robot.pdf
http://www.automotriz.net/tecnica/conocimientos-basicos-48.html
http://mecfunnet.faii.etsii.upm.es/mecanova/problemas/PA-8_v1.pdf
http://www.quiminet.com/articulos/gato-hidraulico-funcionamiento-y-tipos-2650085.htm
http://wikifab.dimf.etsii.upm.es/wikifab/index.php/Usuario:1485_11999#Grados_de_libertad_de_un_robot