Kuka
22
Click here to load reader
-
Upload
yenny-ortega -
Category
Documents
-
view
15 -
download
8
description
brazo robotico, caracteristicas y datos
Transcript of Kuka
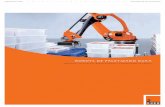
Deutsch Seite 3 Ingls pgina 11 pgina ais Fran 19Contenido1Descripcin del sistema111.1General111.1Diseo del robot121.1Instalacin121.1Intercambio131.1Transporte132Accesorios (seleccin)142.1Instalacin Robot142.1Eje lineal adicional142.1Suministro de energa integrado para el eje 1 al eje 3142.1Monitoreo de Trabajo gama142.1Limitacin del rango de trabajo142.1Conjunto masterizacin KTL142.1Tensin de la correa dispositivo de medicinen - mueca lnea142.1Dispositivo de estreno de ejes del robot143Datos tcnicos153.1 Condiciones de funcionamiento para KR 16 EX 18Figuras27 -461 DESCRIPCIN DEL SISTEMA1.1 GeneralidadesLos robots KR 6, KR 16, KR 16 L6 y KR 16 S son seis ejes - robots industriales con articulado - cinemtica del brazo (Fig. 1--1) para todo punto - a - punto y continua - Ruta tareas controladas.Las principales reas de aplicacin de la KR 6, KR 16y KR 16 L6 son:- Manejo- Asamblea- Aplicacin de adhesivos, selladoresy conservantes- MecanizadoLas principales reas de aplicacin de los KR 16 S son:- Manejo - Asamblea- Aplicacin de adhesivos, selladoresy conservantes -soldadura MIG / MAG--MecanizadoYAG soldadura por haz lserTambin existen las siguientes variantes:- El KR 16 F para su uso en entornos con alta estrs trmico y mecnico-.El KR 16 EX para su uso en potencialmente explosivaambientes- El KR 16 CR para su uso enentornosde salas limpiasEl robot KR 16 CR est instalado en el suelo.El robot KR 16 S est instalado en el suelo o en el techo.Todos los otros robots descritos aqu pueden ser instalados enel suelo, la pared o el techo.Las cargas nominales y cargas suplementariosse puedenmover a la velocidad mxima, incluso con el brazototalmente extendido (vase la Seccin 3 "Datos tcnicos").Todos los principales rganos de la directora asambleas movimiento estn hechas de aleacin ligera.Esteconcepto de diseo ha sido optimizado medianteCAD y FEM en materia de costo - construccin ligera eficaz y de alta torsin y rigidez a la flexin.Como resultado, el robot tiene una alta frecuencia natural y por lo tanto se caracteriza por un buen rendimiento dinmico con alta resistencia a la vibracin.Las articulaciones y los engranajes estn virtualmente libres de juego;todas las piezas mviles estn cubiertos.Todos los ejes son accionados por servomotores sin escobillasdeCAdel enchufe - en el diseo, que no requieren mantenimientoy ofrecen una proteccin fiable contra sobrecarga.Los ejes principales son la vida - lubricado, es decir, uncambiode aceitees necesario despus de 20.000 horas de funcionamientoa la mayor brevedad.Todos los componentes del robot son de configuracin intencionalmente simple y directo;su nmero se ha reducido al mnimo y todos sonfcilmente accesibles.El robot tambin puede serreemplazadorpidamentecomo una unidad completa sin mayores correcciones de programa que se requiera.Movimiento de arriba es posible.Estos y muchos otros detalles de diseo hacen quelos robots rpido, fiable y fcil de mantener, conmnimos requisitos de mantenimiento.Ellos ocupanmuy poco espacio en el suelo y pueden estar situados muy cerca de la pieza de trabajo a causa de la geometra estructural especial.Al igual que todos los robots KUKA, tienen una vida til promedio de 10 a 15 aos.. Cada robot est equipado con un controlador, cuyocontrol y electrnica de potencia estn integrados en ungabinete comn (vase especificacin separada)El controlador es compacto, usuario - amigable yfcilde mantener.Se ajusta a los requisitos de seguridadespecificados en la directiva de mquinas de la UE y las normas pertinentes (incluyendo la norma DIN EN 775).
06.2003.09
Spez KR 6, KR 16, KR 16 L6 de / en / fr
11
Los cables de conexin entre el robot y elarmario de control contienen todas laslneas de suministro deenergay sealespertinentes.Las conexiones de los cablesdelrobot son del plug - in tipo, como tambin lo son las lneas de energa y de suministro de fluido para el funcionamiento de los efectores finales ("oferta integrada de energa para el eje 1 al eje 3" accesorio).Estas lneas se instalan permanentemente dentro eje principal 1 del robot y se pueden dirigir a lo largo de los ejes de corriente abajo al efector de extremo con la ayuda de las interfaces del sistema si es necesario.Diseo 1.2 RobotLos robots se componen de un bastidor de base fija, en la quela columna giratoria gira alrededor de un eje vertical junto con el brazo de enlace, el brazo y la mueca (Fig. 1--1).La mueca (Fig. 1--5) est provisto de una brida de montaje para la fijacin de los efectores de extremo (por ejemplo, pinzas, herramientas de soldadura).Los posibles movimientos de los ejes del robot se representan en la Fig.1--2.Las posiciones de los ejes principales y de la mueca (A 1 a A 3 y A 4 a A 6) se detectan por medio de un sistema de deteccin de posicin absoluta en funcin del ciclo que ofrecen una resolucin para cada eje.Cada eje es accionado por un transistor - controlada, bajo - la inercia AC servomotor.El freno yresolver son el espacio - integrado eficazmente en launidad de motor.El rea de trabajo del robot est limitada por mediode los finales de carrera de software en todos los ejes.Losrangos detrabajode los ejes 1, 2, 3, y 5 estn limitados mecnicamente por topes con una funcin de amortiguacin.Topes mecnicos para la tarea - limitacin relacionada con ladetrabajo correspondiente para los ejes 1 a 3 se puede suministrar como la "limitacin Campo de trabajo" accesorio.Para ciertas aplicaciones, tipos de robots especiales conun adaptadas en - mueca lnea estn disponibles:- KR 16 F con IW 16 F para alta tensin trmica y mecnica.- KR 16 EX con IW 16 F para su uso en entornos potencialmente explosivos.- KR 16 CR con IW 16 CR para su uso enentornosde salaslimpias.El en - mueca lnea "F" (IW 16 F) est ms ampliamentesellada y est equipado con corrosin - componentes resistentes.Se requieren intervalos de mantenimiento ms cortos para mantener la calificacin ms alta tensin.
Con "F" y "EX" robots variantes, el brazo est presurizado.Se opera con una presin interna de 0,1 bar.Con "CR - variantes" robots no se requiere aire comprimido.En los entornos de sala limpia,se utilizala variante KR 16CR.Esta variante ha sidomodificadoextensamentepara lograr un nivel sustancialmente reducidade emisin de partculas en comparacin con la versin estndar.El robot est equipado, adems, con la corrosin - componentes resistentes.1.3 InstalacinLos siguientes mtodos estn disponibles paralainstalacindel robot:-Variante 1 (slo los robots montados en el suelo)Esta variante est disponible con bancadas y tornillos hexagonales con arandelas de seguridad como la"base de montaje con el centrado" accesorio.Tres bancadas se sujetan al robot,cada uno con un tornillo de cabeza hexagonal (Fig. 1 -3).El robotse coloca sobre el piso de la tienda preparada yalineado horizontalmente.Su posicin de montaje estdeterminada por seis agujeros de anclaje, en cada uno delos cuales seinsertanuna cpsula de resina y una varillaroscada.Esto permite que el robot que debeintercambiarsede una manera repetible.El robot est entonces sujeta por medio de tornillos de cabeza hexagonal.Si el robot se va a instalar en el suelo, estmontado sobre una base de hormign, todas las especificaciones de construccin pertinentes deben observarse en relacin con el grado de hormign(> B25 segn la norma DIN 1045: 1988 o C20 / 25segn la norma DIN EN 206-1 : 2001 / DIN 1045-2: 2001) y la capacidad de soporte de carga de la tierra cuando la preparacin de la cimentacin de hormign.Hay que asegurarse de que la superficie de la fundacin es el nivel y suficientemente suave.Los anclajes qumicos deben insertarse congran cuidado para asegurarse de que las fuerzas que se producendurante la operacin del robot (Fig. 1 -7) setransmiten de forma segura al suelo.Lasespecificaciones tambin se pueden utilizar como una base parainvestigaciones ms extensas estticas.
KlUlKlA
-Variante 2Esta variante est disponible con pasadores ypernos como el "cuadro de la mquina de montaje kit" accesorio.El robot se coloca en unaconstruccinde acero preparadoy se sujeta con trespernoshexagonales(Fig. 1--4).Su posicin de montaje se fijapor medio de dos pasadores de colocacin, lo que le permite serintercambiado de manera repetible.1.4 CambioEn los sistemas de fabricacin con un gran nmero derobots, es importante que los robots sean intercambiables.De ello se encargan- La reproducibilidad de las posiciones de sincronizacin marcado por el fabricante en todos losejes, el as - llamado posiciones cero mecnico,y- El equipo - procedimiento de ajuste de cero con la ayuda,y es apoyado adicionalmente por- Off - line de programacin, que puede llevarse a cabocon antelacin y de forma remota desde el robot, y- La instalacin reproducible del robot.Despus de servicio y el trabajo de mantenimiento (en la muecay los motores, por ejemplo), es necesarioestablecer la coincidencia entre lasposiciones ceroelctricos ymecnicos (calibracin) del robot.Un cartucho de calibre est montado por elfabricante en cada eje robot para este propsito.Estos cartuchos de calibre son fijados por elfabricante cuando el robot se calibra antes desu envo.El hecho de que las mediciones sobre cada eje siempre se realizan utilizando el mismo cartucho significa que se consigue la mxima precisin tantocuando primero calibrar la posicin cero mecnicoy cuando posteriormente la reubicacin de la misma.La posicin de la sonda mecnica montada en elcartucho de calibre se puede mostrar mediante atornillado unasonda electrnica (conjunto de masterizacin KTL), disponiblecomoaccesorio, en el cartucho.El sistema de deteccin de posicin se ajusta automticamente aceroelctricocuando la sonda pasa por la muesca de referenciadurante el proceso de ajuste.El robot puede reanudar la operacin una vez que el ajuste a cero se ha llevado a cabo en todos los ejes.Los procedimientos descritos hacen posible que losprogramas, una vez definidos, sean transferidos en cualquiermomento a cualquier otro robot del mismo tipo.
1.5 TransporteHay dos mtodos de transporte de los robots(Fig 1--9.):Con el levantamiento de frente y de la gra- Los robots pueden ser suspendidos del gancho deuna gra mediante el levantamiento de trastos unido a tres cncamos en la columna giratoria.-Slo aprobado aparejos de levante con una capacidad de carga adecuada puede ser utilizado para el transporte de un robot con una gra.Las cuerdas o correas de la elevacin debern estarsituadas de modo que no hay posibilidad deque el robot de inclinacin hacia un lado y del cableado o los conectores se daen.Con carretilla elevadora tenedor- Para el transporte con carretilla elevadora de tenedor, dos ranuras de la horquilla (accesorio) se deben instalar en la columna giratoria.- Para la instalacin en el techo, el robot seentrega invierte en un marco de transporte especialYa en la orientacin correcta, puede ser sacado de este marco por carretilla elevadora tenedor y se transporta al sitio deinstalacin..- Un accesorio especial ranura tenedor est disponible para eltransportedepared - robots montados.-No de elevacin trastos se puede utilizar cuando se transporta el robot junto con una carretilla elevadora tenedor.El robot se debe mover a suposicindetransportecada vez que se transporta.Todos losejesdelrobot s se mueven a posiciones definidas utilizandoel KCP (Fig. 1--10, 1--11, 1--12).Dimensiones para el embalaje de los robots en un recipiente(con las ranuras de la horquilla):Tipo RobotL (mm)W (mm)H (mm)
KR 6 KR 16 KR 16 L6 KR 16 S1115 1184 1416 11841030 1030 1030 10301075 1078 1075 1078
2 ACCESORIOS (seleccin)
El robot KR 16 EX slo puede utilizarse con losaccesorios adecuados ofrecidos y aprobados porKUKA para este propsito.Vea la Seccin 3.1 para las condiciones de operacin.Instalacin 2.1 RobotHay dos variantes disponibles para instalar elrobot:- (Fig. 1--3) con juego de montaje de base- Con kit de montaje en bastidor de la mquina (Fig. 1--4)Vea la Seccin 1.3 para una descripcin.2.2 eje lineal adicionalCon la ayuda de una unidad lineal como uneje de desplazamientoadicional,basado en la serie KL 250/2 (Fig.2--1), el robot se puede mover en traslacin.Eleje es libremente programable.2.3 suministro de energa integrado para el eje 1 al eje 3Varios sistemas de suministro de energa estn disponibles, por ejemplo, para la aplicacin "manipulacin".Desde elpanelde conectores,las lneas de suministro necesarias se ejecutan dentro delbastidor de base y luego externamente a lo largo delbrazo de la columna y el enlacede rotacina una interfaz en el brazo (Fig. 2-2).Desde aqu, las lneas de suministro adicionales se pueden encaminarexternamente a lo largo del brazo a unainterfazapropiadaen el efector de extremo.Esto elimina la necesidad de un espacio - pluma de suministro de consumir.
2.5 Trabajo limitacin de alcanceLos rangos de movimiento de los ejes 1 a 3 puede limitarse mediante topes mecnicos adicionalessegn lo requiera la aplicacin, ajustable en 22,5 pasos.2.6 KTL conjunto masterizacinLa operacin de ajuste a cero, que esnecesaria para todos los ejes, se puede realizar con laayuda de la sonda electrnica que viene como parte deun conjunto de masterizacin KTL (3--5. Fig, 3--7).Esta sonda proporciona un medio particularmente rpidos y sencillos de medida y permite quela computadoraautomtica,- con la ayuda de masterizacin.Debe solicitarsejunto con el robot.2.7 Tensin de la correa dispositivo de medicin en la mueca -lineEquipado con un microcontrolador, el dispositivo de medicin totalmente electrnico permite a lapretensin situado en la correa dentada sermedidofcilmente yde forma fiable por medio de la medicin de frecuencia (Fig. 2--4).2.8 dispositivo de estreno de ejes del robotEste dispositivo puede ser utilizado para mover los ejes delrobot mecnicamente a travs de los principales motores de accionamiento de ejedespus de un fallo de funcionamiento.Es slo para uso en situaciones de emergencia (por ejemplo, para el personal de desage).
2.4 Vigilancia de la zona de trabajoEjes 1 y 2 pueden ser equipados con interruptores de posicin y ranurados anillosquelleven aparejadoslevasajustables.Esto permite que la posicin delrobot que se controla continuamente.Con "EX" robots variantes,no est permitidoel uso de lavigilanciadela zonadetrabajo.3 DATOS TCNICOS
Tipos:KR 6, KR 16, KR 16 L6,KR 16 SVariantes:KR 16 F, KR 16 CR,KR 16 EXNmero de ejes:6 (Fig. 1 -2)Los lmites de cargaTipo RobotKR 6KR 16 KR 16 SKR 16 L6
Dentro de la lnea de la muecaIW6IW 16IW6
De carga til nominal[kg]6166
Suppl.carga, brazo [kg]101010
Suppl.carga, brazo de enlace[kg]variablevariablevariable
Suppl.la carga,la columnagiratoria[kg]202020
Max.cargadistribuidatotal de[kg]364636
vase tambin la Fig.3-1La relacin entre la carga til y sucentro de gravedad puede observarse en las Figuras 3--2y 3--3.
KR 6 con IW 6EjeRango de movimientolimitado de software-Velocidad
1 185 156 / s
235 a 155 -156 / s
3154 a -130 156 / s
4 350 343 / s
5 130 362 / s
6 350 659 / s
KR 16 con IW 16, IW 16 F, IW 16 CREjeRango de movimientolimitado de software-Velocidad
1 185 156 / s
235 a 155 -156 / s
3154 a -130 156 / s
4 350 330 / s
5 130 330 / s
6 350 615 / s
KR 16 L6 con IW 6
Datos de los ejesLos ejes y sus posibles movimientos se representanen la Fig.1--2.Ejes 1 y 3 son los ejes principales, ejes 4 a 6 los ejes de la mueca.Todas las especificaciones en el "rango de movimiento" columnase refieren a la posicin cero elctrico y paralavisualizacin enelKCP para el eje del robot en cuestin.
EjeRango de movimientolimitado de software-Velocidad
1 185 156 / s
235 a 155 -156 / s
3154 a -130 156 / s
4 350 335 / s
5 130 355 / s
6 350 647 / s
KR 16 EX con IW 16 FEjeRango de movimientolimitado de software-Velocidad
1 145 156 / s
235 a 155 -156 / s
3154 a -130 156 / s
4 350 330 / s
5 130 330 / s
6 350 615 / s
Dimensiones principales y sobre de trabajover Fig.3--8, 3--9, 3--10PesoKR 6aprox.235 kg
KR 16aprox.235 kg
KR 16 L6aprox.240 kg
KR 16 Saprox.235 kg
KR 16 S con IW 16EjeRango de movimientolimitado de software-Velocidad
1 185 192 / s
235 a 155 -173 / s
3154 a -130 192 / s
4 350 329 / s
5 130 332 / s
6 350 789 / s
Repetibilidad 0,05 mmPosicin de montajeKR16S:Suelo o techoKR 16 CRPisoTodos los dems tipos: para suelos, paredes o techos(ngulo admisible de un 1 ver Fig. 1 -6)Temperatura ambienteDurante el funcionamiento:278 K a 328 K (5C a 55 C)En el intervalo de temperatura de 278 K (5 C)a 283 K (10 C), el robot debe ser calentadoantes de la operacin normal.Atencin: las condiciones de operacin especiales se aplican aKR 16 EX (ver seccin 3.1).Durante la operacin con SafeRDC: 278 K bis 323 K (5C a 50 C)Durante el almacenamiento y transportaron:233 K a 333 K (-40C a 60 C)Otros lmites pueden solicitar temperatura.
Volumen del espacio de trabajoEl punto de referencia es la interseccin de los ejes 4y 5.KR 614,5 m3
KR 1614,5 m3
KR 16 L624,0 m3
KR 16 S14,5 m3
Centro de carga de gravedad PTipo RobotDistancia horizontal Lz (mm)Distancia vertical Lxy (mm)
KR 6120100
KR 16150120
KR 16 L6120100
KR 16 S150120
Estos valores son vlidos para todas las cargas nominales(Fig. 3--2, 3--3).Cargas dinmicas Principalesver Fig.1--7 y la fig.1--8
La carga de la mueca en -line "F"
Brida de montaje en el eje 6Los robots estn equipados con una brida de montaje DIN / ISO (figura 3--4, 3--6.):KR 6DIN / ISO 9409-1 -A40
KR 16DIN / ISO 9409-1 -A50
KR 16 L6DIN / ISO 9409-1 -A40
KR 16 SDIN / ISO 9409-1 -A50
10 s / min.a 453 K (180 C)373 K (100 C)Temperatura trmica de la superficie de cargaResistente a:-alto contenido de polvo ambiental-lubricantes y refrigerantes-vaporCaractersticas especiales para la variantes "EX" "F" y
0,1 barlibres de aceite y aguaaprox.0,1 m3/ hM50,1 hasta 0,7 bar0 - 1 en bar25 - 30 mGrado de tornillo para conectar el terminal efector 10.9Longitud Gripmin.1.5 xdProfundidad de compromisomin.6 mmmax.9 mmNOTA:La brida se representa con todos los ejes deel robot, en particular eje 6, en la posicin cero (el smboloindica la posicin delelementodeposicionamiento).Ajuste de ceroPara el ajuste cero con el prob electrnico (accesorio) cuando se monta la herramienta, sta debe estar diseado para permitir espacio suficiente para la instalacin y la eliminacin de la prob Fig.3-5, 3-7).Sistema de accionamientoElectromecnico, con servomotores de CA transistor controlado.La capacidad instalada del motor8,8 kWClasificacin de la proteccin del robotIP65 (segn EN 60529), listo para su funcionamiento, con la conexin de cables enchufadosClasificacin de la proteccin de la en -line muecas "Estndar" y "CR"IP65 (segn EN 60529)
Sobrepresina presin delbrazo:Aire comprimido:Consumo de aire:unin roscada:Reductor de presin:Manmetro:Filtrar:Pintura estndarKR 6, KR 16, KR 16 L6, KR 16 S:Robot y naranja mueca (RAL 2003)Cubierta A1negro (RAL 9005)Acabados especiales de pinturaKR 16 F con IW 16 F:Robotnaranja (RAL 2003)Muecaplata (calor - resistente,calor - reflejando especialfinal de la pintura)Cubierta A1negro (RAL 9005)KR 16 EX con IW 16 F:Robotnaranja (RAL 2003)Muecanaranja (RAL 2003)Cubra A 1de acero inoxidable sin revestirKR 16 CR con IW 16 CR:Robotblanco (RAL 9016)Muecablanco (RAL 9016)Pintura especial adicional a peticinCubra A 1de acero inoxidable sin revestir
Clasificacin de la proteccin de la mueca en -line "F"IP67 (segn EN 60529)
Nivel de sonido