Manual Caja Entrenamiento
37
Click here to load reader
-
Upload
cesar-leyva -
Category
Documents
-
view
70 -
download
1
description
manual
Transcript of Manual Caja Entrenamiento
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
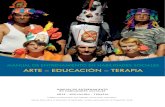
SISTEMA DE PRACTICAS PARA PIC
Elementos que componen la tarjeta de entrenamiento para Pic.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
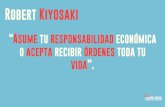
PROGRAMACION DE PICS
El sistema de desarrollo para PIC incorpora un programador para descargar los programas realizados.
Paso 1:
Debemos colocar los interruptores de programacin hacia la palabra programar y verificar que el sistema se encuentra encendido.
Paso2:
Dar doble clic en el icono llamado Master prog.
Paso 3: Al tener conectado el programador en el puerto USB nos mostrara el tipo de PIC que se encuentra conectado y que esta listo para programar.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
Paso 4: Una vez reconcido el pic y el programador buscar el archivo .hex que deseamos grabar en el pic.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
Paso 5: Al tener el archivo hex dar clic en el botn escribir para programar el PIC.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
Paso 6: En la ventana se indicara que la programacin ha sido exitosa.
Paso7: Una vez terminado de programar el PIC debemos regresar los interruptores hacia abajo para poder utilizar los bits del puerto B.
Atencin: si no regresamos los interruptores la ejecucin del programa puede ser errnea o nula.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
En las siguientes paginas mostraremos el uso de de los diferentes mdulos de la tarjeta, para ello mostramos la conexin hacia los mdulos, el diagrama elctrico y el cdigo referente al control del modulo.
Los programas se encuentran en el formato .bas y .hex para que se descarguen directamente.
Tambin se incluyen las fotografas de conexin para que se puedan observar con mayor facilidad.
El archivo y el programa para la instalacin y configuracin del programador vienen contenido en la carpeta programador as como soluciones a diferentes problemas.
ATENCION: Debemos tener cuidado al configurar los puertos del PIC ya que una mala configuracin o conexin podra daar de forma irremediable los puertos del PIC.
Los programas aqu presentados as como las interconexiones han sido realizados y probados en nuestro laboratorio de investigacin.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
COMPROBACION MODULO LED
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO
program leds
dim t as byte trisa = 0x10 trisb = 0x00 portb = 0x00 cmcon=7 main: t=0 for t=0 to 7 portb.t=1 delay_ms(1000) next t portb =0 delay_ms(1000)
end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
PUSH BOTON
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO
program push
main: cmcon=7 trisb =%00000000 trisa =%11111111 ciclo:
if porta.0 =0 then goto uno end if if porta.1 =0 then goto dos end if if porta.2 =0 then goto tre end if if porta.3 =0 then goto cua end if
goto ciclo
uno: portb= 1 delay_ms(1000) portb= 0 goto ciclo dos: portb= 3 delay_ms(1000) portb= 0 goto ciclo tre: portb= 7 delay_ms(1000) portb= 0 goto ciclo cua: portb= 15 delay_ms(1000) portb= 0 goto ciclo end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
DIP SWITCH
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO program dip
main: cmcon=7 trisb =%00000000 trisa =%11111111 ciclo:
if porta.0 =0 then goto uno end if if porta.1 =0 then goto dos end if if porta.2 =0 then goto tre end if if porta.3 =0 then goto cua end if
goto ciclo
uno: portb= 1 delay_ms(1000) portb= 0 goto ciclo dos: portb= 3 delay_ms(1000) portb= 0 goto ciclo tre: portb= 7 delay_ms(1000) portb= 0 goto ciclo cua: portb= 15 delay_ms(1000) portb= 0 goto ciclo end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
SERVO
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO
program servo main: cmcon=7 trisb =0x00 trisa =0xFF preg: if porta.0=0 then goto der end if if porta.1=0 then goto cen end if if porta.2=0 then goto izq end if goto preg der: PortB=0x01 Delay_us(650) PortB=0x00 delay_ms(20) goto preg cen: PortB=0x01 Delay_us(1550) PortB=0x00 delay_ms(20) goto preg izq: PortB=0x01 Delay_us(2500) PortB=0x00 delay_ms(20) goto preg end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
TRIAC
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
ESQUEMA
CODIGO program triac
main: cmcon=7 trisb =%00000000 trisa =%11111111 ciclo: portb= 1 delay_ms(1000) portb= 0 delay_ms(1000)
goto ciclo
end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
MOTOR
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO
program motor
dim current_duty,old_duty as byte
sub procedure InitMain() cmcon = 7 TRISA = 0XFF PORTB = 0 TRISB = 0
PWM1_Init(1000) 'inicializa el pwm a 1000hz
end sub
main: InitMain() current_duty = 50 'inicia ciclo de trabajo al 50% PWM1_Start() PWM1_Set_Duty(current_duty)
while (TRUE) if (RA0_bit 0) then Delay_ms(40) Inc(current_duty) PWM1_Set_Duty(current_duty) end if
if (RA1_bit 0) then Delay_ms(40) Dec(current_duty) PWM1_Set_Duty(current_duty) end if Delay_ms(5) wend end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
BOCINA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
ESQUEMA
CODIGO program boci sub procedure Tone1() Sound_Play(659, 250) ' Frequency = 659Hz, duration = 250ms end sub sub procedure Tone2() Sound_Play(698, 250) ' Frequency = 698Hz, duration = 250ms end sub sub procedure Tone3() Sound_Play(784, 250) ' Frequency = 784Hz, duration = 250ms end sub sub procedure Melody() ' Plays the melody "Yellow house" Tone1() Tone2() Tone3() Tone3() Tone1() Tone2() Tone3() Tone3() Tone1() Tone2() Tone3() Tone1() Tone2() Tone3() Tone3() Tone1() Tone2() Tone3() Tone3() Tone3() Tone2() Tone2() Tone1() end sub main: CMCON=7 TRISB = 0x00 TRISA = 0xFF Sound_Init(PORTB, 0) Melody() end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
RELES
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO
program rele cmcon =7 main: TRISB=0X00 TRISA=0XFF PORTB=0X00 DELAY_ms(50) PORTB=0X01 DELAY_ms (2000) PORTB=0x00 DELAY_ms (2000) PORTB=0x02 DELAY_ms (2000) PORTB=0x00 delay_ms(2000) GOTO main end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
DISPLAY
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO program dis main: cmcon=7 trisb =%00000000 trisa =%00010000 porta.2 =1 portb=0 ciclo: portb=$3f delay_ms(500) portb=0 delay_ms(500) portb=$06 delay_ms(500) portb=0 delay_ms(500) portb=$5b delay_ms(500) portb=0 delay_ms(500) portb=$4f delay_ms(500) portb=0 delay_ms(500) portb=$66 delay_ms(500) portb=0 delay_ms(500) portb=$6d delay_ms(500) portb=0 delay_ms(500) portb=$7d delay_ms(500) portb=0 delay_ms(500) portb=$07 delay_ms(500) portb=0 delay_ms(500) portb=$7f delay_ms(500) portb=0 delay_ms(500) portb=$6f delay_ms(500) portb=0 delay_ms(500) goto ciclo end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
DISPLAY MUX
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO program dimux
trisb = 0x00 portb = 0x00 trisa = 0x10 porta = 0x00 cmcon=7 main: aqui: portb= 0x76 porta= 0x01 delay_ms(240) portb= 0x3f porta= 0x02 delay_ms(240) portb= 0x38 porta= 0x04 delay_ms(240) portb= 0x77 porta= 0x08 delay_ms(240) goto aqui end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
MOTOR A PASOS
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
ESQUEMA
CODIGO program PASO DIM T AS BYTE TRISA = 0X10 Porta=0X00
main: CMCON=7 REGRESO: T=0 FOR T=0 TO 50 PORTA= 0X01 DELAY_MS (200) PORTA= 0X02 DELAY_MS (200) PORTA= 0X04 DELAY_MS (200) PORTA= 0X08 DELAY_MS (200) NEXT T PORTA=%00000000 DELAY_MS(5000)
GOTO REGRESO end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
LCD
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO
program LCD
dim LCD_RS as sbit at RA6_bit LCD_EN as sbit at RA7_bit LCD_D4 as sbit at RA0_bit LCD_D5 as sbit at RA1_bit LCD_D6 as sbit at RA2_bit LCD_D7 as sbit at RA3_bit
LCD_RS_Direction as sbit at TRISA6_bit LCD_EN_Direction as sbit at TRISA7_bit LCD_D4_Direction as sbit at TRISA0_bit LCD_D5_Direction as sbit at TRISA1_bit LCD_D6_Direction as sbit at TRISA2_bit LCD_D7_Direction as sbit at TRISA3_bit
dim txt1 as char[8]
main: TRISA = 0x10 PORTA = 0x00 cmcon = 0x07
txt1 = "POZARICA"
Lcd_Init() Lcd_Cmd(_LCD_CLEAR) Lcd_Cmd(_LCD_CURSOR_OFF) Lcd_out(1,1,txt1) Delay_ms(2000)
end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
TECLADO MULTIPLEXADO
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO program tecla TRISB = 0xf0 trisa = 0x10 cmcon=7 main: Teclado: PORTB.0 = 0 ' Columna 1 = 0 PORTB.1 = 1 ' Columna 2 = 1 PORTB.2 = 1 ' Columna 3 = 1 portb.3 = 1 'Columna 4 = 1
If PORTB.4 = 0 Then PORTa = 0x01 delay_ms(500) ' tecla "1" end if If PORTB.5 = 0 Then PORTa = 0x04 delay_ms(500)' tecla "4" end if If PORTB.6 = 0 Then PORTa = 0x07 delay_ms(500)' tecla "7" end if If PORTB.7 = 0 Then PORTa = 0x0a delay_ms(500)' tecla "A" end if PORTB.0 = 1 ' Columna 1 = 1 PORTB.1 = 0 ' Columna 2 = 0 PORTB.2 = 1 ' Columna 3 = 1 PORTB.3 = 1 ' Columna 4 = 1
If PORTB.4 = 0 Then PORTa =0x02 delay_ms(500)' tecla "2" end if If PORTB.5 = 0 Then PORTa =0x05 delay_ms(500)' tecla "5" end if If PORTB.6 = 0 Then PORTa =0x08 delay_ms(500)' tecla "8" end if If PORTB.7 = 0 Then PORTa =0x00 delay_ms(500) ' tecla "0" end if PORTB.0 = 1 ' Columna 1 = 1 PORTB.1 = 1 ' Columna 2 = 1 PORTB.2 = 0 ' Columna 3 = 0 PORTB.3 = 1 ' Columna 4 = 1
If PORTB.4 = 0 Then PORTa = 0x03 delay_ms(500)' tecla "3" end if If PORTB.5 = 0 Then PORTa = 0x06 delay_ms(500)' tecla "6" end if If PORTB.6 = 0 Then PORTa = 0x09 delay_ms(500)' tecla "9" end if If PORTB.7 = 0 Then PORTa = 0x0b delay_ms(500) ' tecla "b" end if PORTB.0 = 1 ' Columna 1 = 1 PORTB.1 = 1 ' Columna 2 = 1 PORTB.2 = 1 ' Columna 3 = 1 PORTB.3 = 0 ' Columna 4 = 0
If PORTB.4 = 0 Then PORTa = 0x0c delay_ms(500)' tecla "c" end if If PORTB.5 = 0 Then PORTa = 0x0d delay_ms(500)' tecla "d" end if If PORTB.6 = 0 Then PORTa = 0x0e delay_ms(500)' tecla "e" end if If PORTB.7 = 0 Then PORTa = 0xf delay_ms(500)' tecla "f" end if goto teclado
end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
MATRIZ DE LEDS
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO
program matrix trisb = 0x00 portb = 0x00 trisa = 0x10 porta = 0x00 cmcon=7
main: aqui:
portb= 0x10 porta= 0x1E delay_ms(2) portb= 0x20 porta= 0x1D delay_ms(2) portb= 0xFF porta= 0x1B delay_ms(2) portb= 0x20 porta= 0x17 delay_ms(2) portb= 0x10 porta= 0x0F delay_ms(2) goto aqui
end.
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
MAX 232
ESQUEMA
-
DISEOS ELECTRONICOS CULHUACAN
www. robotica-dec.com.mx Mex. D.F Tel (01)55 58502344 Practicas PICAXE 08M. [email protected]
CODIGO
program max dim uart_rd as byte
TRISA = 0x10 PORTA = 0x00 cmcon=7 main: UART1_Init(9600) Delay_ms(100) while (TRUE) if (UART1_Data_Ready() =1) then uart_rd = UART1_Read() UART1_Write(uart_rd) delay_ms(500) porta= uart_rd delay_ms(1000) end if wend end.