Maquinas y Motores
72
Universidad de Oriente Núcleo de Anzoátegui Escuela de Ingeniería y Ciencias Aplicadas Departamento de Ingeniería Química Cátedra: Electrotecnia Sección: 01 Profesor Crisanto Mata Bachiller (S) Almerida, Alejandra C.I: 18.766.940 Golindano, Mariela C.I: 13.475.473 Gómez, Jorge C.I: 19.316.025 Lara, Arnoldo C.I: 20.343.621
-
Upload
alejandra-almerida -
Category
Documents
-
view
234 -
download
0
description
TRABAJO DE ELECTROTECNIA
Transcript of Maquinas y Motores
Universidad de Oriente
Núcleo de Anzoátegui
Escuela de Ingeniería y Ciencias Aplicadas
Departamento de Ingeniería Química
Cátedra: Electrotecnia
Sección: 01
Profesor
Crisanto Mata Bachiller (S)
Almerida, Alejandra C.I: 18.766.940
Golindano, Mariela C.I: 13.475.473
Gómez, Jorge C.I: 19.316.025
Lara, Arnoldo C.I: 20.343.621
Universidad de Oriente
Puerto la Cruz, Marzo del 2011
Introducción
Las maquinas y motores son ingenios que permiten
controlar una fuerza y convertirla en trabajo útil. Este control
puede ser de dirección, proporción, sentido o intensidad. Por
tanto el uso de Maquinas y Motores hace posible ejercer una
fuerza mayor que la muscular o realizarla en la dirección
adecuada. Los criterios básicos definitorios de maquinas y
motores son:
Maquina: Una máquina es un conjunto de piezas o elementos
móviles y fijos articulados que a través de sus movimientos
relativos transforman energía en trabajo, es decir, cuyo
funcionamiento posibilita aprovechar, dirigir, regular o
transformar energía o realizar un trabajo con un fin
determinado. Se denomina maquinaria (del latín machinarĭus) al
conjunto de máquinas que se aplican para un mismo fin y al
mecanismo que da movimiento a un dispositivo. Las máquinas
pueden ser simples y complejas: un ejemplo de máquinas
simples es la rueda y compleja la bicicleta.
Motor: Un motor es la parte de una máquina capaz de
transformar cualquier tipo de energía (eléctrica, de combustibles
fósiles, etc.), en energía mecánica capaz de realizar un trabajo.
2
Universidad de Oriente
En los automóviles este efecto es una fuerza que produce el
movimiento.
“Las maquinas y motores constituyen un bien material-
industrial, en pro del bienestar y reproductibilidad de
producción”.
Maquinas
Una máquina es un conjunto de piezas o elementos móviles y
fijos articulados que transforman energía en trabajo, es decir, cuyo
funcionamiento posibilita aprovechar, dirigir, regular o transformar
energía o realizar un trabajo con un fin determinado. Se denomina
maquinaria (del latín machinarĭus) al conjunto de máquinas que se
aplican para un mismo fin y al mecanismo que da movimiento a un
dispositivo. Las máquinas pueden ser simples y complejas: un
ejemplo de máquinas simples es la rueda y compleja la bicicleta.
Componentes
Los elementos básicos que componen una máquina son:
Motor: Es el mecanismo que transforma la energía para la
realización del trabajo requerido. Conviene señalar que los
motores también son máquinas, en este caso destinadas a
transformar la energía original (eléctrica, química, potencial,
cinética) en energía mecánica en forma de rotación de un eje o
movimiento alternativo de un pistón. Aquellas máquinas que
realizan la transformación inversa, cuando es posible, se
denominan máquinas generadoras o generadores y aunque pueda
3
Universidad de Oriente
pensarse que se circunscriben a los generadores de energía
eléctrica, también deben incluirse en esta categoría otro tipos de
máquinas como, por ejemplo, las bombas o compresores.
Mecanismo: Es el conjunto de elementos mecánicos, de los que
alguno será móvil, destinado a transformar la energía
proporcionada por el motor en el efecto útil buscado.
Bastidor: es la estructura rígida que soporta el motor y el
mecanismo, garantizando el enlace entre todos los elementos.
Componentes de Seguridad: Son aquellos que, sin contribuir al
trabajo de la máquina, están destinados a proteger a las personas
que trabajan con ella. Actualmente, en el ámbito industrial es de
suma importancia la protección de los trabajadores, atendiendo al
imperativo legal y económico y a la condición social de una
empresa que constituye el campo de la seguridad laboral, que está
comprendida dentro del concepto más amplio de prevención de
riesgos laborales.
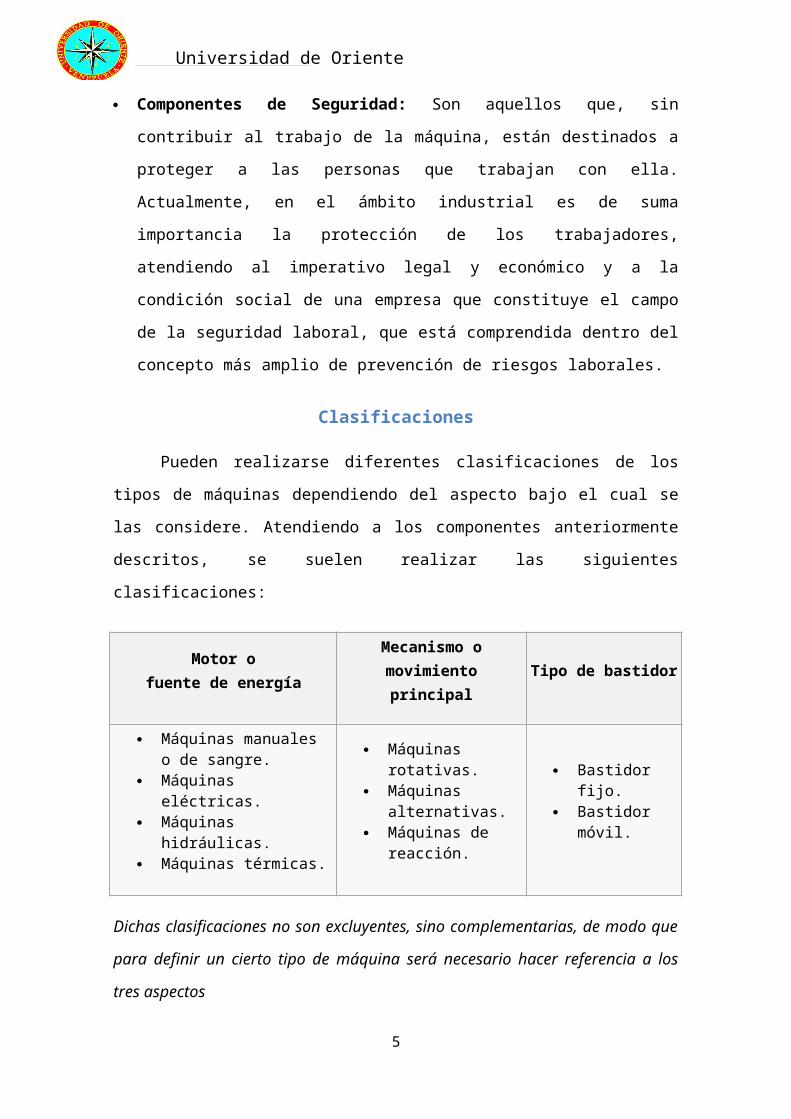
Clasificaciones
Pueden realizarse diferentes clasificaciones de los tipos de
máquinas dependiendo del aspecto bajo el cual se las considere.
Atendiendo a los componentes anteriormente descritos, se suelen
realizar las siguientes clasificaciones:
Motor ofuente de energía
Mecanismo omovimiento principal
Tipo de bastidor
Máquinas manuales o de sangre.
Máquinas eléctricas. Máquinas hidráulicas. Máquinas térmicas.
Máquinas rotativas.
Máquinas alternativas.
Máquinas de reacción.
Bastidor fijo. Bastidor
móvil.
4
Universidad de Oriente
Dichas clasificaciones no son excluyentes, sino complementarias, de
modo que para definir un cierto tipo de máquina será necesario hacer
referencia a los tres aspectos
Otra posible clasificación de las máquinas es su utilidad o
empleo, así pueden considerarse las taladradoras, elevadores,
compresores, embaladoras, exprimidores, etc. La lista es
interminable, pues el ser humano siempre ha perseguido el diseño y
la construcción de ingenios para conseguir con ellos trabajos que no
puede realizar empleando su propia fuerza y habilidad o para realizar
esos trabajos con mayor comodidad.
Tipos de Maquinas Rotatorias (Adjunción Eléctrica)
Existen cuatro clases principales de maquinas rotatorias: de
Conmutador de corriente continua, de inducción, sincrónicas y
conmutador polifásico. Hay otros tipos que encajan
convenientemente en algunas de estas clasificaciones; incluyendo
motores de paso a paso, que son, generalmente, maquinas
sincronices que operan en el modo de par; maquinas homopolares,
que son una variación del principio del disco generador de Faraday y
se usan par alimentar cargas de baja presión y de alta corriente.
Maquinas de Conmutador de Corriente Continua:
Comúnmente se les llama “maquinas de corriente continua” y se
distinguen por el dispositivo de conmutación mecánica, conocido
como colector. Se emplea ampliamente en aplicaciones de
tracción e industriales.
Maquinas de Inducción: Al motor de inducción se le considera
“el caballo de batalla” de la industria, pero también es el principal
motor usado en los utensilios de hogares y oficina. Es sencillo,
robusto, durable y de larga permanencia, lo cual es la base para su
amplia aceptabilidad en casi todos los aspectos tecnológicos.
Puede ser operado como un generador y así se emplea en varias
aplicaciones aeroespaciales e hidroeléctricas.
5

Universidad de Oriente
Maquinas Sincrónicas: La maquina sincrónica es probablemente
la configuración de maquina más diversificada y a menudo es
difícil reconocer las muchas variaciones que estas clase de
maquinas puede tomar
Motor
Un motor es la parte de una máquina
capaz de transformar cualquier tipo de
energía (eléctrica, de combustibles
fósiles, etc.), en energía mecánica
capaz de realizar un trabajo. En los
automóviles este efecto es una fuerza
que produce el movimiento. Existen diversos tipos, siendo de los más
comunes los siguientes:
Motores térmicos, cuando el trabajo se obtiene a partir de energía
calórica.
Motores de combustión interna, son motores térmicos en los
cuales se produce una combustión del fluido del motor,
transformando su energía química en energía térmica, a partir de
la cual se obtiene energía mecánica. El fluido motor antes de
iniciar la combustión es una mezcla de un comburente (como el
fuego) y un combustibles, como los derivados del petróleo y
gasolina, los del gas natural o los biocombustibles.
Motores de combustión externa, son motores térmicos en los
cuales se produce una combustión en un fluido distinto al fluido
motor. El fluido motor alcanza un estado térmico de mayor fuerza
posible de llevar es mediante la transmisión de energía a través de
una pared.
Motores eléctricos, cuando el trabajo se obtiene a partir de una
corriente eléctrica.
6
Universidad de Oriente
Características generales
Rendimiento: es el cociente entre la potencia útil que generan y
la potencia absorbida. Habitualmente se representa con la letra
griega η.
Velocidad de poco giro o velocidad nominal: es la velocidad
angular del ®, es decir, el número de rotaciones por minuto (rpm o
RPM) a las que gira. Se representa por la letra n.
Potencia: es el trabajo que el motor es capaz de realizar en la
unidad de tiempo a una determinada velocidad de giro. Se mide
normalmente en caballos de vapor (CV), siendo 1 CV igual a 736
vatios.
Par motor: es el momento de rotación que actúa sobre el eje del
motor y determina su giro. Se mide en kg*m (kilogramos por
metro) o lo que es lo mismo newtons-metro (Nm), siendo 1 kgm
igual a 9,81 Nm (9,81 kg*f*m). Hay varios tipos de pares, véanse
por ejemplo el par de arranque, el par de aceleración y el par
nominal.
Diodo
Un diodo es la unión de dos placas de material semiconductor,
uno denominado N, y otro, denominado P. El diodo está constituido
por dos partes, una llamada ánodo, y otra, llamada cátodo.
Precisamente esto es lo que hace tan útiles a los diodos, pues tienen
dos estados, uno de conducción, y otro de bloqueo. El estado de
conducción siempre es conectando el ánodo al polo positivo y el
cátodo al polo negativo. Si invertimos la conexión de los polos el
diodo está en estado de bloqueo, es decir, no deja pasar la corriente.
Los diodos se dividen en dos categorías, los rectificadores
monofásicos y los rectificadores trifásicos.
Diodos Rectificadores
7
Universidad de Oriente
Un diodo rectificador es uno de los dispositivos de la familia de los
diodos más sencillos. El nombre diodo rectificador procede de su
aplicación, la cual consiste en separar los ciclos positivos de una
señal de corriente alterna. Si se aplica al diodo una tensión de
corriente alterna durante los medios ciclos positivos, se polariza en
forma directa; de esta manera, permite el paso de la corriente
eléctrica.
Pero durante los medios ciclos negativos, el diodo se polariza de
manera inversa; con ello, evita el paso de la corriente en tal sentido.
Durante la fabricación de los diodos rectificadores, se
consideran tres factores: la frecuencia máxima en que realizan
correctamente su función, la corriente máxima en que pueden
conducir en sentido directo y las tensiones directa e inversa máximas
que soportarán.
Una de las aplicaciones clásicas de los diodos rectificadores, es
en las fuentes de alimentación; aquí, convierten una señal de
corriente alterna en otra de corriente directa.
Componentes
Una de las aplicaciones más importantes de los diodos es la
rectificación o recortamiento de una señal proveniente de una fuente
de A.C. con el propósito de producir una señal D.C. a esto se le
conoce como rectificación.
Por lo general todos los equipos que tienen componentes
electrónicos requieren una fuente la cual nos debe garantizar una
D.C. de salida fija y regulada, independientemente de las
fluctuaciones de la línea de voltaje o los cambios de corriente en la
carga.
8

Universidad de Oriente
Existen 3 tipos de rectificadores monofásicos más usuales en el
proceso de convertir una señal de AC en DC.
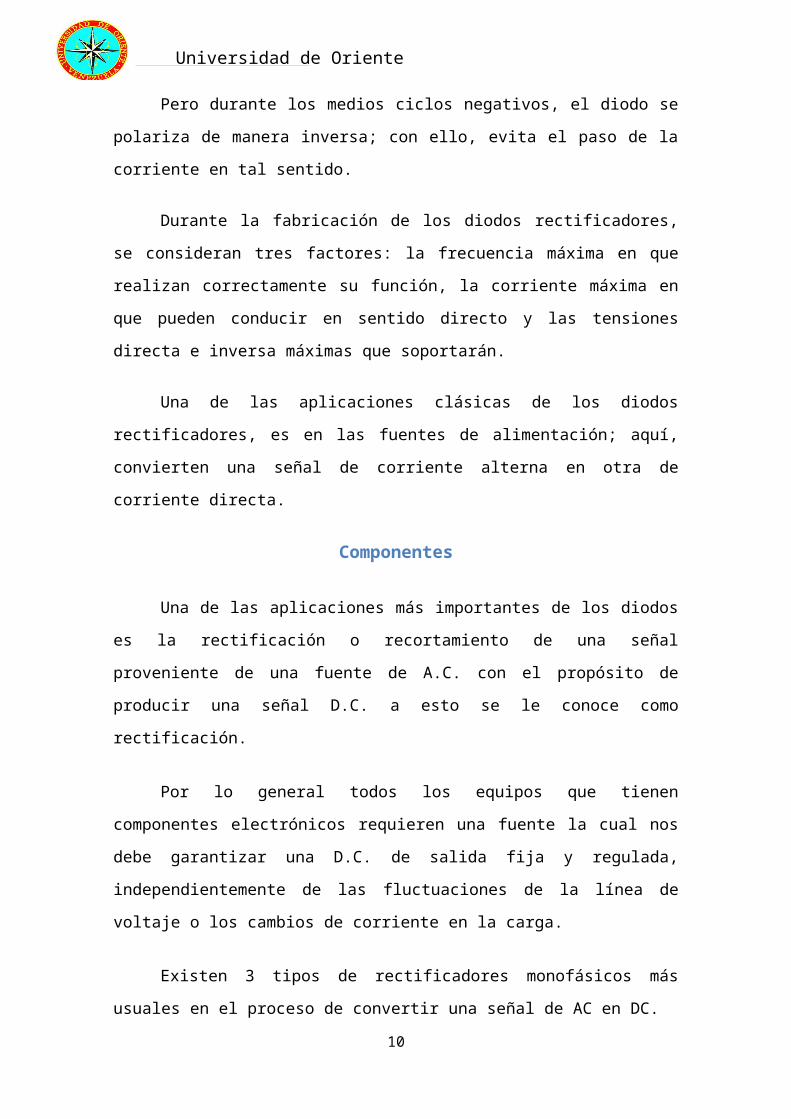
Rectificador de media onda
Dependiendo de cómo coloquemos el
diodo, rectificará los semiciclos
positivos o negativos que provengan
del transformador. En el gráfico, el
diodo rectifica solo los semiciclos
positivos de una señal alterna. En el caso que le demos la vuelta al
diodo, dejaría pasar los semiciclos negativos. Este tipo de circuito solo
se puede aplicar en alimentaciones de circuitos de baja potencia. Se
pierde mucha energía. La relación existente entre las tensiones de
entrada y salida es: Vd = 0,4* Vv. y la relación entre las
intensidades de entrada y salida: Id: 0,6* Iv.
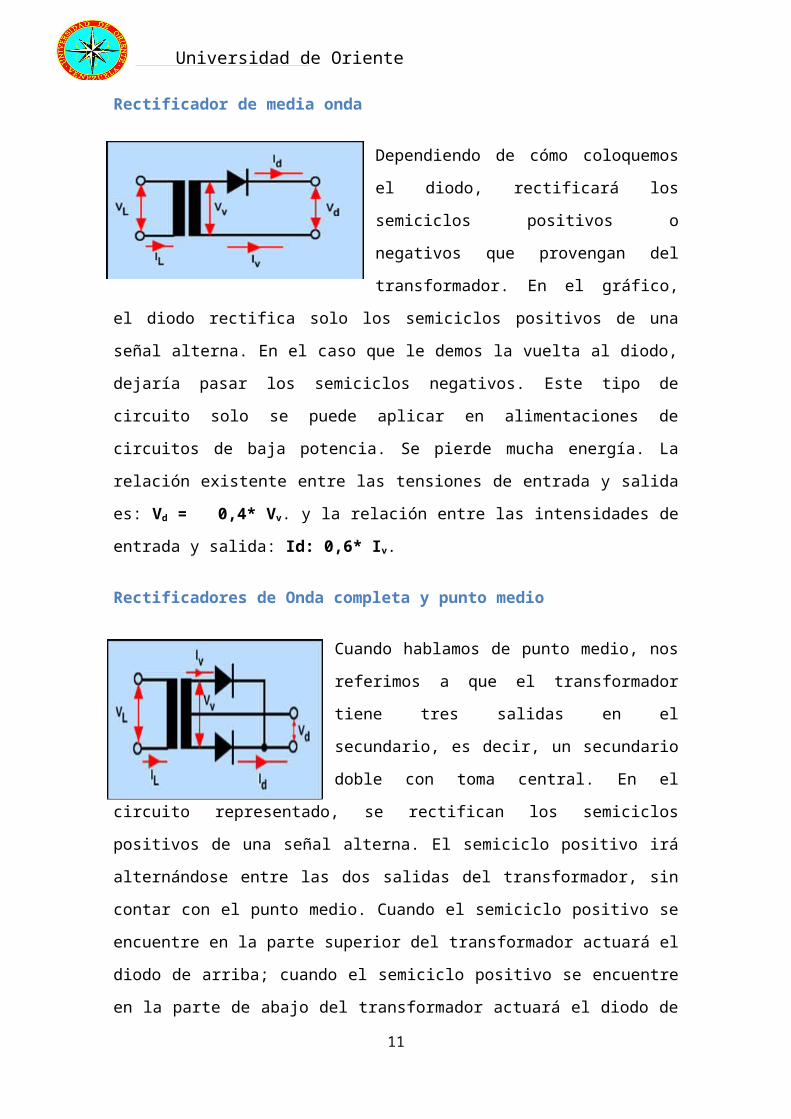
Rectificadores de Onda completa y punto medio
Cuando hablamos de punto medio, nos
referimos a que el transformador tiene
tres salidas en el secundario, es decir, un
secundario doble con toma central. En el
circuito representado, se rectifican los
semiciclos positivos de una señal alterna.
El semiciclo positivo irá alternándose entre las dos salidas del
transformador, sin contar con el punto medio. Cuando el semiciclo
positivo se encuentre en la parte superior del transformador actuará
el diodo de arriba; cuando el semiciclo positivo se encuentre en la
parte de abajo del transformador actuará el diodo de abajo. La
relación existente entre tensiones e intensidades de entrada y salida
es:
Vd = 0,4* Vv y Id = 1,2* Iv.
9
Universidad de Oriente
Este circuito se utiliza poco porque el transformador sale menos
económico, de todos modos, en el caso de que se utilice solo se hace
con circuitos de baja potencia.
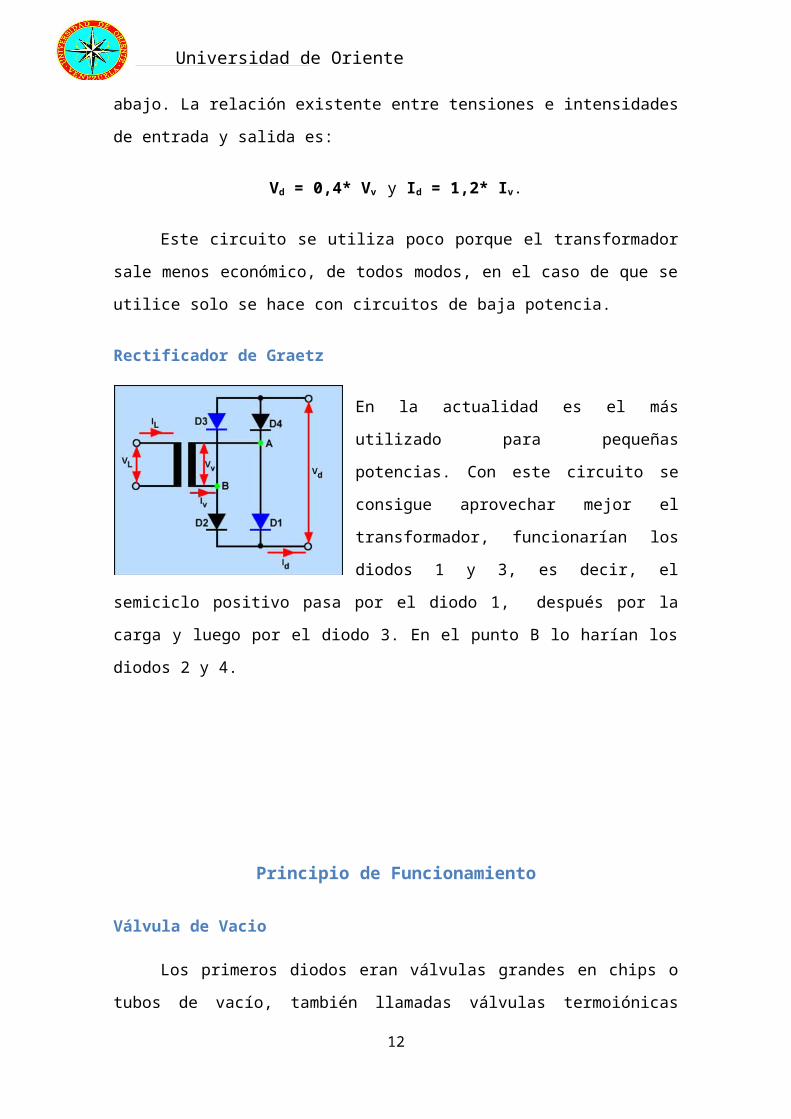
Rectificador de Graetz
En la actualidad es el más utilizado
para pequeñas potencias. Con este
circuito se consigue aprovechar mejor
el transformador, funcionarían los
diodos 1 y 3, es decir, el semiciclo
positivo pasa por el diodo 1, después
por la carga y luego por el diodo 3. En
el punto B lo harían los diodos 2 y 4.
Principio de Funcionamiento
Válvula de Vacio
Los primeros diodos eran válvulas grandes en chips o tubos de
vacío, también llamadas válvulas termoiónicas constituidas por dos
electrodos rodeados de vacío en un tubo de cristal, con un aspecto
similar al de las lámparas incandescentes.
Construcción de Diodos Rectificadores
Su construcción está basada en la unión PN siendo su principal
aplicación como rectificadores. Este tipo de diodos (normalmente de
silicio) soportan elevadas temperaturas (hasta 200ºC en la unión),
siendo su resistencia muy baja y la corriente en tensión inversa muy
pequeña.
10
Universidad de Oriente
El diodo más antiguo y utilizado es el diodo rectificador que
conduce en un sentido, pero se opone a la circulación de corriente en
el sentido opuesto.
Aproximaciones del Diodo Rectificador
Se utiliza para obtener respuestas rápidas y es muy útil para la
detección de averías.
En esta aproximación se tiene en cuenta la tensión del codo
La exponencial se aproxima a una vertical y a una horizontal
que pasan por 0,7 V (este valor es el valor de la tensión umbral para
el silicio, porque suponemos que el diodo es de silicio, si fuera de
germanio se tomaría el valor de 0,2 V).
Se tiene en cuenta la resistencia interna del Diodo, además de la tensión del codo
Una vez que el diodo entra en conducción se considera que la
tensión aumenta linealmente con la corriente La curva del diodo se
aproxima a una recta que pasa por 0,7 V y tiene una pendiente cuyo
valor es la inversa de la resistencia interna.
Unión pn
Los diodos pn son uniones de dos materiales semiconductores
tipos p y n, por lo que también reciben la denominación de unión pn,
ninguno de los dos cristales por separado tiene carga eléctrica, ya
que en cada cristal, el número de electrones y protones es el mismo,
de lo que podemos decir que los dos cristales, tanto el p como el n,
son neutros
Identificar el ánodo (REGIÓN P) y el cátodo (REGIÓN N) en un Diodo Rectificador
Debido a que un diodo rectificador presenta comportamiento
rectificante, si el ánodo se polariza con voltaje positivo (mayor al
11
Universidad de Oriente
voltaje de umbral) con respecto al cátodo, el diodo conduce corriente
apreciable, comportándose como una pequeña resistencia (a esto se
conoce como polarización directa) y cuando se invierte esta polaridad
en el diodo, la corriente que circula es despreciable, comportándose
como una resistencia muy grande (polarización inversa).
Amplificadores Operacionales
El amplificador operacional es un dispositivo lineal de
propósito general el cual tiene capacidad de manejo de señal desde
f=0 Hz hasta una frecuencia definida por el fabricante; tiene además
limites de señal que van desde el orden de los nV, hasta unas
docenas de voltio (especificación también definida por el fabricante).
Los amplificadores operacionales caracterizan por su entrada
diferencial y una ganancia muy alta, generalmente mayor que 105
equivalentes a 100 dB.
El A.O. es un amplificador de alta ganancia directamente
acoplado, que en general se alimenta con fuentes positivas y
negativas, la cual permite que tenga excursiones tanto por arriba
como por debajo tierra (o el punto de referencia que se considere). El
nombre de amplificador operacional proviene de una de las utilidades
básicas de este, como lo son realizar operaciones matemáticas en
computadores análogos.
Un “ampop” es un amplificador
diferencial que puede ser
modelado por el circuito de dos
puertas que aparece en la
siguiente figura (1). Lo que lo
caracteriza como un amplificador operacional es su elevada ganancia
12
Universidad de Oriente
de voltaje una A de 100000 o superior. Por lo tanto, sólo se requieren
aproximadamente 50.
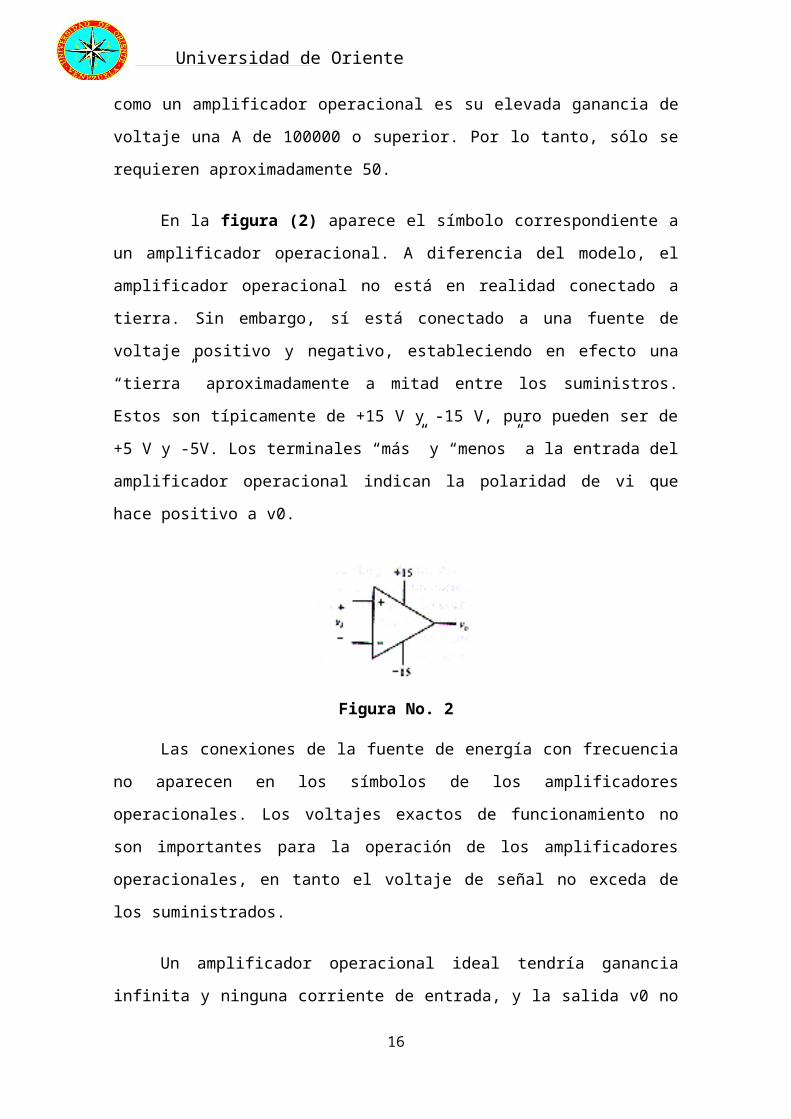
En la figura (2) aparece el símbolo correspondiente a un
amplificador operacional. A diferencia del modelo, el amplificador
operacional no está en realidad conectado a tierra. Sin embargo, sí
está conectado a una fuente de voltaje positivo y negativo,
estableciendo en efecto una “tierra” aproximadamente a mitad entre
los suministros. Estos son típicamente de +15 V y -15 V, puro pueden
ser de +5 V y -5V. Los terminales “más” y “menos” a la entrada del
amplificador operacional indican la polaridad de vi que hace positivo a
v0.
Figura No. 2
Las conexiones de la fuente de energía con frecuencia no
aparecen en los símbolos de los amplificadores operacionales. Los
voltajes exactos de funcionamiento no son importantes para la
operación de los amplificadores operacionales, en tanto el voltaje de
señal no exceda de los suministrados.
Un amplificador operacional ideal tendría ganancia infinita y
ninguna corriente de entrada, y la salida v0 no sería afectada por
ninguna carga. Estas propiedades pueden resumirse como
A = ", Rentr.= ", Rsal.= 0
Un “ampop” ideal tiene otras propiedades, tales como un ancho
de banda infinito, un intervalo de voltajes infinito a la entrada y la
salida. Pero la propiedad más importante para simplificar las ideas de
13
Universidad de Oriente
diseño es A =“. En la práctica esto no puede lograrse, pero el análisis
basado en un modelo con ganancia infinita conduce a un acuerdo
excelente en cuanto a la actuación real en la mayoría de los casos.
El Amplificador Operacional ideal se caracteriza por:
Resistencia de entrada, (Ren), tiende a infinito.
Resistencia de salida, (Ro), tiende a cero.
Ganancia de tensión de lazo abierto, (A), tiende a infinito.
Ancho de banda (BW), tiende a infinito.
Vo = 0, cuando V+ = V-
Ya que la resistencia de entrada, Ren, es infinita, la corriente en
cada entrada , inversora y no inversora, es cero. Además el hecho de
que la ganancia de lazo abierto sea infinita hace que la tensión entre
las dos terminales sea cero, como es muestra a continuación:
V+ - V- = Vo
V+ - V- = 0
V+ = V-
Generadores de Corriente Continua
Los generadores de corriente
continua son maquinas que producen
tensión su funcionamiento se reduce
siempre al principio de la bobina
giratorio dentro de un campo
magnético. Si una armadura gira
entre dos polos magnéticos fijos, la corriente en la armadura circula
14
Universidad de Oriente
en un sentido durante la mitad de cada revolución, y en el otro
sentido durante la otra mitad. Para producir un flujo constante de
corriente en un sentido, o corriente continua, en un aparato
determinado, es necesario disponer de un medio para invertir el flujo
de corriente fuera del generador una vez durante cada revolución. En
las máquinas antiguas esta inversión se llevaba a cabo mediante un
conmutador, un anillo de metal partido montado sobre el eje de una
armadura. Las dos mitades del anillo se aislaban entre sí y servían
como bornes de la bobina. Las escobillas fijas de metal o de carbón se
mantenían en contacto con el conmutador, que al girar conectaba
eléctricamente la bobina a los cables externos. Cuando la armadura
giraba, cada escobilla estaba en contacto de forma alternativa con las
mitades del conmutador, cambiando la posición en el momento en el
que la corriente invertía su sentido dentro de la bobina de la
armadura. Así se producía un flujo de corriente de un sentido en el
circuito exterior al que el generador estaba conectado. Los
generadores de corriente continua funcionan normalmente a voltajes
bastante bajos para evitar las chispas que se producen entre las
escobillas y el conmutador a voltajes altos. El potencial más alto
desarrollado para este tipo de generadores suele ser de 1.500 voltios.
En algunas máquinas más modernas esta inversión se realiza usando
aparatos de potencia electrónica, como por ejemplo rectificadores de
diodo.
Los generadores modernos de corriente continua utilizan
armaduras de tambor, que suelen estar formadas por un gran número
de bobinas agrupadas en hendiduras longitudinales dentro del núcleo
de la armadura y conectadas a los segmentos adecuados de un
conmutador múltiple. Si una armadura tiene un solo circuito de cable,
la corriente que se produce aumentará y disminuirá dependiendo de
la parte del campo magnético a través del cual se esté moviendo el
circuito. Un conmutador de varios segmentos usado con una
armadura de tambor conecta siempre el circuito externo a uno de
cable que se mueve a través de un área de alta intensidad del campo,
15
Universidad de Oriente
y como resultado la corriente que suministran las bobinas de la
armadura es prácticamente constante. Los campos de los
generadores modernos se equipan con cuatro o más polos
electromagnéticos que aumentan el tamaño y la resistencia del
campo magnético. En algunos casos, se añaden interpolos más
pequeños para compensar las distorsiones que causa el efecto
magnético de la armadura en el flujo eléctrico del campo.
El campo inductor de un generador se puede obtener mediante
un imán permanente (magneto) o por medio de un electroimán
(dinamo). En este último caso, el electroimán se excita por una
corriente independiente o por autoexcitación, es decir, la propia
corriente producida en la dinamo sirve para crear el campo
magnético en las bobinas del inductor. Existen tres tipos de dinamo
según sea la forma en que estén acoplados el inductor y el inducido:
en serie, en derivación y en combinación.
Los generadores de corriente continua se clasifican según el
método que usan para proporcionar corriente de campo que excite
los imanes del mismo. Un generador de excitado en serie tiene su
campo en serie respecto a la armadura. Un generador de excitado en
derivación, tiene su campo conectado en paralelo a la armadura. Un
generador de excitado combinado tiene parte de sus campos
conectados en serie y parte en paralelo. Los dos últimos tipos de
generadores tienen la ventaja de suministrar un voltaje relativamente
constante, bajo cargas eléctricas variables. El de excitado en serie se
usa sobre todo para suministrar una corriente constante a voltaje
variable. Un magneto es un generador pequeño de corriente continua
con un campo magnético permanente.
Generador de Corriente Alterna
El generador de corriente alterna es un dispositivo que
convierte la energía mecánica en energía eléctrica. El generador más
16
Universidad de Oriente
simple consta de una espira rectangular que gira en un campo
magnético uniforme.
El movimiento de rotación de las espiras es producido por el
movimiento de una turbina accionada por una corriente de agua en
una central hidroeléctrica, o por un chorro de vapor en una central
térmica. En el primer caso, una parte de la energía potencial del agua
embalsada se transforma en energía eléctrica; en el segundo caso,
una parte de la energía química se transforma en energía eléctrica al
quemar carbón u otro combustible fósil.
Cuando la espira gira, el flujo del campo magnético a través de
la espira cambia con el tiempo. Se produce una fem. Los extremos de
la espira se conectan a dos anillos que giran con la espira, tal como
se ve en la figura. Las conexiones al circuito externo se hacen
mediante escobillas estacionarias en contacto con los anillos.
Si conectamos una bombilla al generador veremos que por el filamento de la bombilla circula una corriente que hace que se ponga incandescente, y emite tanta más luz cuanto mayor sea la velocidad con que gira la espira en el campo magnético.
Con este ejemplo, completamos las tres formas que hay de variar
con el tiempo el flujo de un campo magnético a través de una espira,
F =B·S, como producto escalar de dos vectores, el vector campo B y
el vector superficie S.
Cuando el campo cambia con el tiempo.
Cuando el área de la espira cambia con el tiempo.
17
Universidad de Oriente
Cuando el ángulo entre el vector campo B y el vector superficie S
cambia con el tiempo. Situación que se discute en esta página.
Componentes de un Generador de Corriente Alterna
Los principales componentes de un generador de corriente alterna
son los que se muestran a continuación:
1. Estator.
2. Rotor.
3. Sistema de enfriamiento.
4. Excitatriz.
5. Conmutador.
Estractor
Los elementos más importantes del estator de un generador de
corriente alterna, son las siguientes:
Componentes mecánicas.
Sistema de conexión en estrella.
Sistema de conexión en delta.
Componentes mecánicas. Las componentes mecánicas de un
generador son las siguientes:
La carcaza.
El núcleo.
Las bobinas.
La caja de terminales.
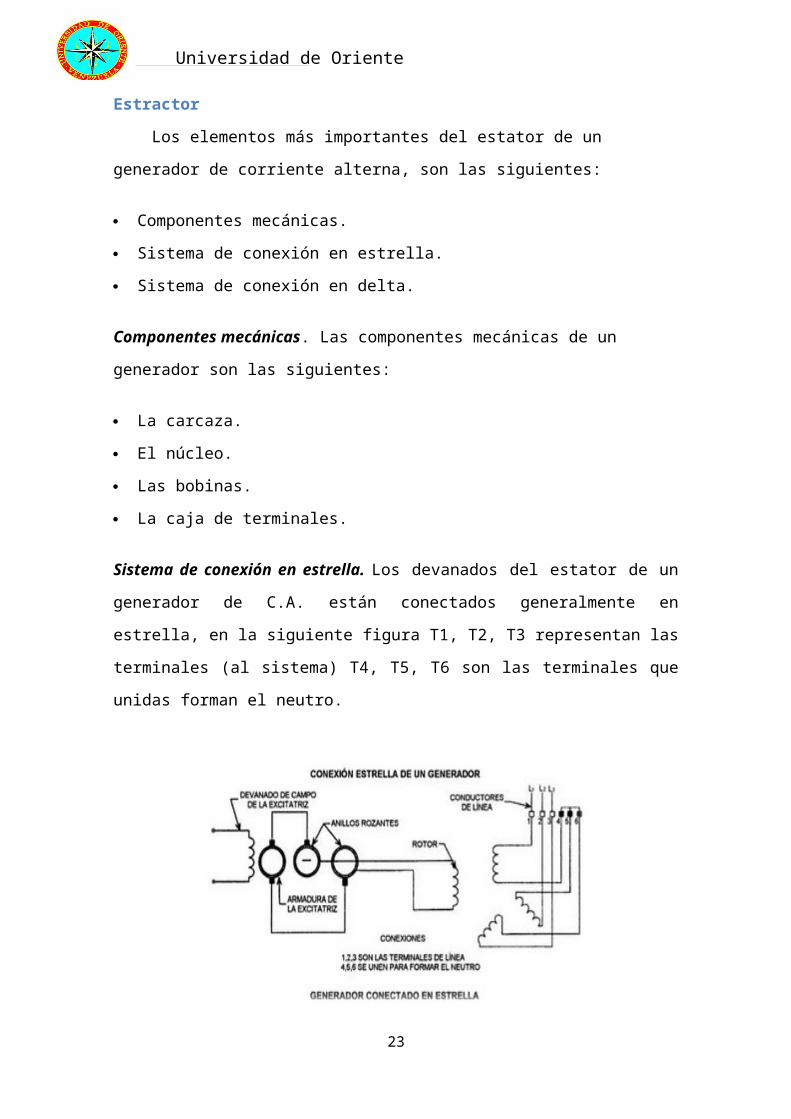
Sistema de conexión en estrella. Los devanados del estator de un
generador de C.A. están conectados generalmente en estrella, en la
siguiente figura T1, T2, T3 representan las terminales (al sistema) T4,
T5, T6 son las terminales que unidas forman el neutro.
18

Universidad de Oriente
Sistema deconexión delta. La conexión delta se hace conectando
las terminales 1 a 6, 2 a 4 y 3 a 5, las terminales de línea se conectan
a 1, 2 y 3, con esta conexión se tiene con relación a la conexión
estrella, un voltaje menor, pero en cambio se incrementa la corriente
de línea.
El Rotor
Para producir el campo magnético sobre el rotor se utilizan
polos que consisten de paquetes de laminaciones de fierro magnético
(para reducir las llamadas corrientes circulantes) con conductores de
cobre arrollados alrededor del hierro, estos polos están excitados por
una corriente directa. Los polos del rotor se arreglan por pares
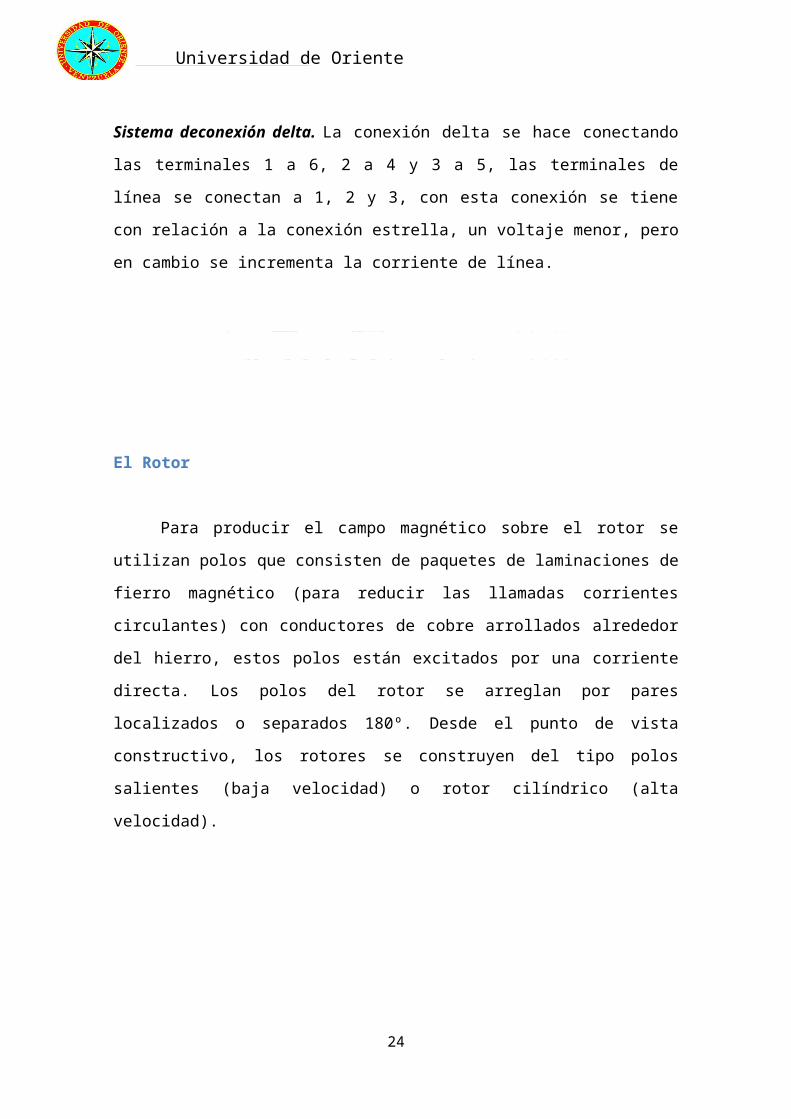
localizados o separados 180º. Desde el punto de vista constructivo,
los rotores se construyen del tipo polos salientes (baja velocidad) o
rotor cilíndrico (alta velocidad).
19
Universidad de Oriente
En el rotor se encuentran alojadas las bobinas del devanado de
campo que inducen el voltaje en el devanado de armadura, en donde
se encuentran las bobinas que determinan si el generador es
monofásico o trifásico.
20
Universidad de Oriente
Voltaje de salida monofásico. Un
generador que tiene un
voltaje de salida
monofásico,
se lo denomina
generador monofásico. Este
voltaje de salida se obtiene con un conjunto de bobinas de armadura
en el estator, si se trata de un generador monofásico de dos polos;
entonces, se dice que estos polos son Norte y Sur con conductores
que son parte de los conductores de armadura continuos y que llenan
las ranuras del estator. Las ranuras están separadas mecánicamente
y eléctricamente por 180º, de modo que cuando el flujo proveniente
del polo norte intercepta el lado A(1) del conductor, el flujo que
retoma al polo sur intercepta al lado A(2) del conducto, obteniéndose
como resultado la generación de un pico de voltaje entre A(1) y A(2).
Cuando los polos norte y sur están perpendiculares con respecto al
plano de los conductores A (1) y A (2), no hay estato de fuerzas que
intercepten los conductores y, entonces la diferencia de voltaje entre
A (1) y A (2) es cero. Cuando el rotor completa una revolución (360º)
se dice que ha completado un ciclo.
21
Universidad de Oriente
Motor de corriente continua
El motor de corriente continua es una
máquina que convierte la energía eléctrica
en mecánica, principalmente mediante el
movimiento rotatorio. En la actualidad
existen nuevas aplicaciones con motores
eléctricos que no producen movimiento
rotatorio, sino que con algunas
modificaciones, ejercen tracción sobre un
riel. Estos motores se conocen como
motores lineales.
Esta máquina de corriente continua es una de las más versátiles en la
industria. Su fácil control de posición, paro y velocidad la han
convertido en una de las mejores opciones en aplicaciones de control
y automatización de procesos. Pero con la llegada de la electrónica su
uso ha disminuido en gran medida, pues los motores de corriente
alterna, del tipo asíncrono, pueden ser controlados de igual forma a
precios más accesibles para el consumidor medio de la industria. A
pesar de esto los motores de corriente continua se siguen utilizando
en muchas aplicaciones de potencia (trenes y tranvías) o de precisión
(máquinas, micro motor, etc.)
La principal característica del motor de corriente continua es la
posibilidad de regular la velocidad desde vacío a plena carga. Su
principal inconveniente, el mantenimiento, muy caro y laborioso.
Una máquina de corriente continua (generador o motor) se
compone principalmente de dos partes, un estator que da soporte
mecánico al aparato y tiene un hueco en el centro generalmente de
forma cilíndrica. En el estator además se encuentran los polos, que
pueden ser de imanes permanentes o devanados con hilo de cobre
sobre núcleo de hierro. El rotor es generalmente de forma cilíndrica,
22
Universidad de Oriente
también devanado y con núcleo, al que llega la corriente mediante
dos escobillas.
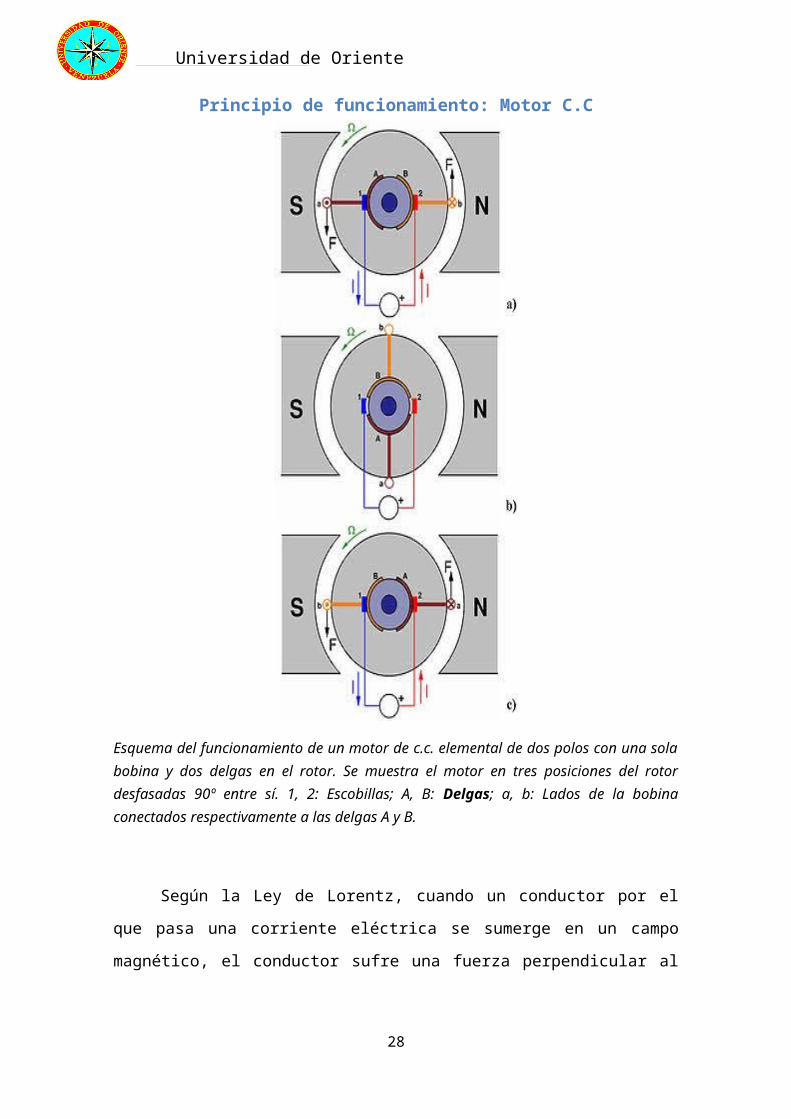
Principio de funcionamiento: Motor C.C
Esquema del funcionamiento de un motor de c.c. elemental de dos polos con una sola bobina y dos delgas en el rotor. Se muestra el motor en tres posiciones del rotor desfasadas 90º entre sí. 1, 2: Escobillas; A, B: Delgas; a, b: Lados de la bobina conectados respectivamente a las delgas A y B.
Según la Ley de Lorentz, cuando un conductor por el que pasa
una corriente eléctrica se sumerge en un campo magnético, el
conductor sufre una fuerza perpendicular al plano formado por el
23
Universidad de Oriente
campo magnético y la corriente, siguiendo la regla de la mano
derecha, con módulo
F: Fuerza en newtons
I: Intensidad que recorre el conductor en amperios
l: Longitud del conductor en metros lineales
B: Densidad de campo magnético o densidad de flujo teslas
El rotor no solo tiene un conductor, sino varios repartidos por la
periferia. A medida que gira, la corriente se activa en el conductor
apropiado.
Normalmente se aplica una corriente con sentido contrario en el
extremo opuesto del rotor, para compensar la fuerza neta y aumentar
el momento.
Fuerza contraelectromotriz inducida en un motor
Es la tensión que se crea en los conductores de un motor como
consecuencia del corte de las líneas de fuerza, es el efecto generador
de pines.
La polaridad de la tensión en los generadores es inversa a la
aplicada en bornes del motor.
Las fuertes puntas de corriente de un motor en el arranque son
debidas a que con la máquina parada no hay fuerza
contraelectromotriz y el bobinado se comporta como una resistencia
pura del circuito.
Número de escobillas
Las escobillas deben poner en cortocircuito todas las bobinas
situadas en la zona neutra. Si la máquina tiene dos polos, tenemos
24
Universidad de Oriente
también dos zonas neutras. En consecuencia, el número total de
escobillas ha de ser igual al número de polos de la máquina.
En cuanto a su posición, será coincidente con las líneas neutras
de los polos.
Motores de Corriente Continua: Conmutación en el Motor
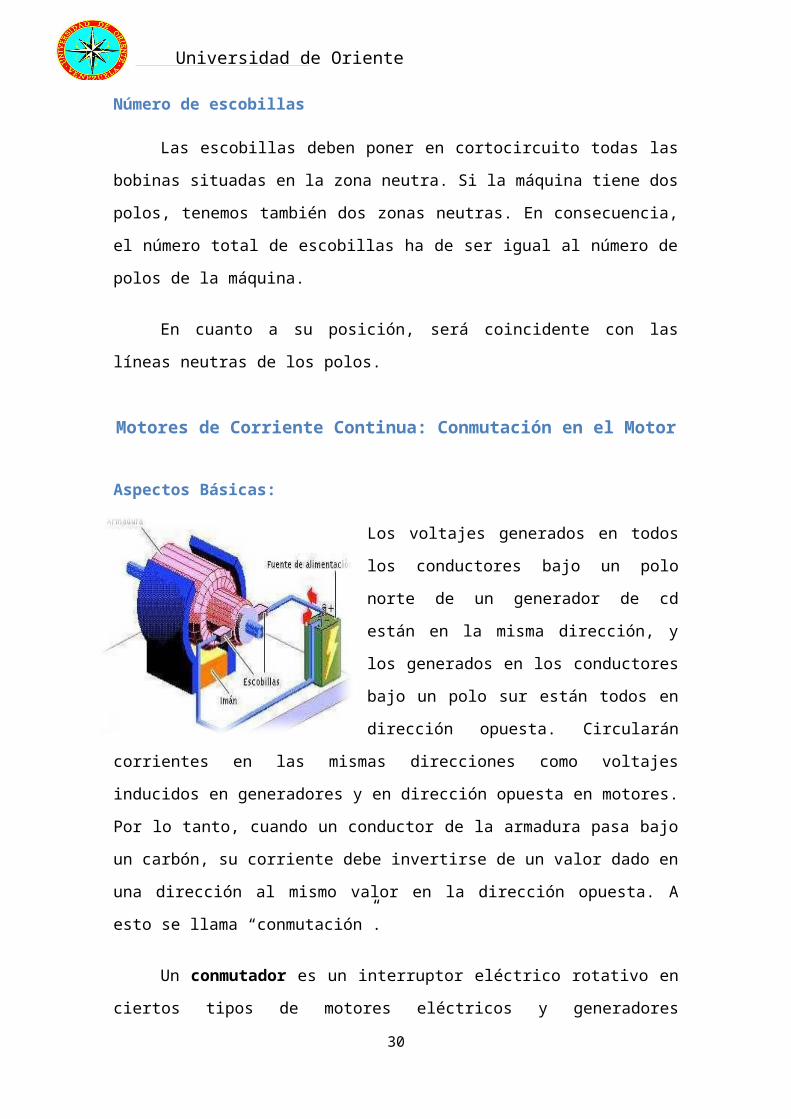
Aspectos Básicas:
Los voltajes generados en todos los
conductores bajo un polo norte de un
generador de cd están en la misma
dirección, y los generados en los
conductores bajo un polo sur están
todos en dirección opuesta. Circularán
corrientes en las mismas direcciones
como voltajes inducidos en
generadores y en dirección opuesta en motores. Por lo tanto, cuando
un conductor de la armadura pasa bajo un carbón, su corriente debe
invertirse de un valor dado en una dirección al mismo valor en la
dirección opuesta. A esto se llama “conmutación”.
Un conmutador es un interruptor eléctrico rotativo en ciertos
tipos de motores eléctricos y generadores eléctricos que
periódicamente cambia la dirección de la corriente entre el rotor y el
circuito externo. En un motor, proporciona la energía a la mejor
ubicación en el rotor, y en un generador, recibe la energía de forma
similar. Como un interruptor, tiene una excepcional larga vida útil,
tomando en cuenta el número de aperturas y cierres que ocurren en
operación normal.
La acción del conmutador y de las conexiones de las
bobinas del campo de los motores son exactamente las
mismas que usan los generadores
25
Universidad de Oriente
Sentido de giro E Inversión
El sentido de giro de un motor de corriente continua depende
del sentido relativo de las corrientes circulantes por los devanados
inductor e inducido.
“La inversión del sentido de giro del motor de corriente
continua se consigue invirtiendo el sentido del campo
magnético o de la corriente del inducido”
Si se permuta la polaridad en ambos bobinados, el eje del motor
gira en el mismo sentido.
Los cambios de polaridad de los bobinados, tanto en el inductor
como en el inducido se realizarán en la caja de bornes de la máquina,
y además el ciclo combinado producido por el rotor produce la fmm
(fuerza magnetomotriz).
El sentido de giro lo podemos determinar con la regla de la
mano derecha, la cual nos va a mostrar el sentido de la fuerza. La
regla de la mano derecha es de la siguiente manera: el pulgar nos
muestra hacia dónde va la corriente, el dedo índice apunta en la
dirección en la cual se dirige el flujo del campo magnético, y el dedo
medio hacia dónde va dirigida la fuerza resultante y por lo tanto el
sentido de giro.
Reversibilidad
Los motores y los generadores de corriente continua están
constituidos esencialmente por los mismos elementos,
diferenciándose únicamente en la forma de utilización.
Por reversibilidad entre el motor y el generador se entiende que
si se hace girar al rotor, se produce en el devanado inducido una
fuerza electromotriz capaz de transformarse en energía en el circuito
de carga.
26
Universidad de Oriente
En cambio, si se aplica una tensión continua al devanado
inducido del generador a través del colector de delgas, el
comportamiento de la máquina ahora es de motor, capaz de
transformar la fuerza contraelectromotriz en energía mecánica.
En ambos casos el inducido está sometido a la acción del
campo inductor principal.
Tipos de Motores de Corriente Continua
Los motores de CC se clasifican de acuerdo al tipo de bobinado
del campo como motores Serie, Shunt, Shunt estabilizado, o
Compuesto (Compound). Sin embargo algunos de ellos pueden ser
auto excitados o de excitación separada o pueden tener campos de
imán permanente.
Ellos muestran curvas muy diferentes de torque-velocidad y se
conectan en diferentes configuraciones para diferentes aplicaciones.
Algunos motores de CC utilizan imán permanente como campo
principal, especialmente los de potencia (HP) fraccionada (1/4,1/2,3/4)
y baja potencia.
Los motores de imán permanente tienen la ventaja de no
requerir una fuente de potencia para el campo, pero tienen la
desventaja de ser susceptibles a la desmagnetización por cargas de
choque eléctricas o mecánicas. Los campos de imán permanente no
se pueden ajustar para entonar el motor para ajustarse a la
aplicación, como pueden los de campo bobinado.
Motor Shunt
En un motor shunt, el flujo es constante si la fuente de poder
del campo es fija. Asuma que el voltaje de armadura Et es constante.
A medida que la corriente de la carga disminuye desde plena carga a
sin carga, la velocidad debe aumentar proporcionalmente de manera
27
Universidad de Oriente
que la fuerza contra electromotriz Ec aumentará para mantener la
ecuación en balance. A voltaje nominal y campo completo, la
velocidad del motor shunt aumentará 5% a medida que la corriente
de carga disminuya de plena carga a sin carga. La reacción de
armadura evita que el flujo de campo permanezca absolutamente
constante con los cambios en la corriente de la carga. La reacción de
armadura, por lo tanto causa un ligero debilitamiento del flujo a
medida que la corriente aumenta. Esto tiende a aumentar la
velocidad del motor. Esto se llama “inestabilidad” y el motor se dice
que está inestable.
Motor Serie
En un motor serie, el flujo del campo es una función de la
corriente de la carga y de la curva de saturación del motor. A medida
que la corriente de la carga disminuye desde plena carga, el flujo
disminuye y la velocidad aumenta. La carga de incremento de
velocidad es pequeña al principio pero aumenta a medida que la
corriente se reduce. Para cada motor serie, hay una mínima carga
segura determinada por la máxima velocidad de operación segura.
Motor Compuesto
Los motores compuestos tienen un campo serie sobre el tope
del bobinado del campo shunt como se ve en la figura. Este campo
serie, el cual consiste de pocas vueltas de un alambre grueso, es
conectado en serie con la armadura y lleva la corriente de armadura.
El flujo del campo serie varia directamente a medida que la
corriente de armadura varia, y es directamente proporcional a la
carga. El campo serie se conecta de manera tal que su flujo se añade
al flujo del campo principal shunt. Los motores compound se conectan
28
Universidad de Oriente
normalmente de esta manera y se denominan como compound
acumulativo.
Esto provee una característica de velocidad la cual no es tan
“dura” o plana como la del motor shunt, no tan “suave” como un
motor serie. Un motor compound tiene un limitado rango de
debilitamiento de campo, la debilitación del campo puede resultar en
exceder la máxima velocidad segura del motor sin carga. Los motores
de CC compound son algunas veces utilizados donde se requiera una
respuesta estable de torque constante a través de un amplio rango
de velocidad.
Motor Shunt Estabilizado
Para vencer la potencial inestabilidad de un motor recto shunt y
reducir la “caída” de velocidad de un motor compound, un ligero
devanado serie es arrollado sobre el devanado shunt. El flujo del
devanado serie aumenta con la corriente de carga y produce un
motor estable con una característica de caída de velocidad para todas
las cargas.
El devanado serie es llamado un campo estabilizador o “stab” y
el motor un motor shunt estabilizado. La regulación de velocidad de
un motor shunt estabilizado es típicamente menor al 15%.
La mayoría de los motores Reliance Super RPM y RPM III son
shunt estabilizados. Cuando el campo shunt del motor es debilitado
para aumentar la velocidad a un nivel de operación mas alto, el flujo
del devanado serie llega a ser un porcentaje mayor del flujo total, de
manera que a medida que la corriente aumenta, la caída de velocidad
es un porcentaje mayor que antes.
En aplicaciones donde la instabilidad resultante pudiera afectar
seriamente el funcionamiento de la maquina (movida por el motor), el
campo serie puede desconectarse. En aplicaciones donde los efectos
de estabilidad nos son críticos, como en un frenado regenerativo, el
29
Universidad de Oriente
campo serie puede utilizarse para mejorar el rendimiento que el
provee.
Cuando el campo serie no se conecta, el fabricante del control
debe asegurar que la máxima velocidad segura del motor no es
excedida y debe reconocer la perdida de torque que resulta de la
operación del motor shunt estabilizado sin el devanado serie.
Motor de Corriente Alterna
Se denomina motor de corriente
alterna a aquellos motores eléctricos que
funcionan con corriente alterna (corriente
eléctrica en la que la magnitud y dirección
varían cíclicamente). Un motor es una
máquina motriz, esto es, un aparato que
convierte una forma determinada de
energía en energía mecánica de rotación o par. Un motor eléctrico
convierte la energía eléctrica en fuerzas de giro por medio de la
acción mutua de los campos magnéticos.
Un generador eléctrico, por otra parte, transforma energía
mecánica de rotación en energía eléctrica y se le puede llamar una
máquina generatriz de fem. Las dos formas básicas son el generador
de corriente continua y el generador de corriente alterna, este último
más correctamente llamado alternador.
“Todos los generadores necesitan una máquina motriz (motor) de
algún tipo para producir la fuerza de rotación, por medio de la cual un
conductor puede cortar las líneas de fuerza magnéticas y producir
una fem. La máquina más simple de los motores y generadores es el
alternador”.
30
Universidad de Oriente
Motores de corriente alterna
En algunos casos, tales como barcos, donde la fuente principal
de energía es de corriente continua, o donde se desea un gran
margen, pueden emplearse motores de c-c. Sin embargo, la mayoría
de los motores modernos trabajan con fuentes de corriente alterna.
Existe una gran variedad de motores de c-a, entre ellos tres tipos
básicos: el universal, el síncrono y el de jaula de ardilla.
Motores universales
Los motores universales trabajan con voltajes de corriente
continua o corriente alterna. Tal motor, llamado universal, se utiliza
en sierra eléctrica, taladro, utensilios de cocina, ventiladores,
sopladores, batidoras y otras aplicaciones donde se requiere gran
velocidad con cargas débiles o pequeñas fuerzas. Estos motores para
corriente alterna y directa, incluyendo los universales se distinguen
por su conmutador devanado y las escobillas. Los componentes de
este motor son: Los campos (estator), la masa (rotor), las escobillas
(los excitadores) y las tapas (las cubiertas laterales del motor). El
circuito eléctrico es muy simple, tiene solamente una vía para el paso
de la corriente, porque el circuito está conectado en serie. Su
potencial es mayor por tener mayor flexibilidad en vencer la inercia
cuando está en reposo, o sea, tiene un par de arranque excelente,
pero tiene una dificultad, y es que no está construido para uso
continuo o permanente.
Otra dificultad de los motores universales son las emisiones
electromagnéticas. Las chispas del colector (chisporroteos) junto con
su propio campo magnético generan interferencias o ruido en el
espacio radioeléctrico. Esto se puede reducir por medio de los
condensadores de paso, de 0,001 μF a 0,01 μF, conectados de las
escobillas a la carcasa del motor y conectando ésta a masa.Estos
motores tienen la ventaja de que alcanzan grandes velocidades pero
31

Universidad de Oriente
con poca fuerza. Existen también motores de corriente alterna
trifásica que funcionan a 380 V y a otras tensiones.
Motores síncronos
Implicando, se puede utilizar un alternador como motor en
determinadas circunstancias. Si se excita el campo con c-c y se
alimenta por los anillos colectores a la bobina del rotor con c-a, la
máquina no arrancará. El campo alrededor de la bobina del rotor es
alterno en polaridad magnética pero durante un semiperiodo del ciclo
completo, intentará moverse en una dirección y durante el siguiente
semiperiodo en la dirección opuesta. El resultado es que la máquina
permanece parada. La máquina solamente se calentará y
posiblemente se quemará.
Para generar el campo magnético del rotor, se suministra una
CC al devanado del campo; esto se realiza frecuentemente por medio
de una excitatriz, la cual consta de un pequeño generador de CC
impulsado por el motor, conectado mecánicamente a él. Se mencionó
anteriormente que para obtener un par constante en un motor
eléctrico, es necesario mantener los campos magnéticos del rotor y
del estator constante el uno con relación al otro. Esto significa que el
campo que rota electromagnéticamente en el estator y el campo que
rota mecánicamente en el rotor se deben alinear todo el tiempo.
La única condición para que esto ocurra consiste en que ambos
campos roten a la velocidad sincrónica:
Es decir, son motores de velocidad constante.
Para una máquina sincrónica de polos no salientes (rotor
cilíndrico), el par se puede escribir en términos de la corriente alterna
del estator, is(t), y de la corriente continua del rotor, if:
32
Universidad de Oriente
Donde γ es el ángulo entre los campos del
estator y del rotor
El rotor de un alternador de dos polos debe hacer una vuelta
completa para producir un ciclo de c-a. Debe girar 60 veces por
segundo (si la frecuencia fuera de 60 Hz), o 3.600 revoluciones por
minuto (rpm), para producir una c-a de 60 Hz. Si se puede girar a
3.600 rpm tal alternador por medio de algún aparato mecánico, como
por ejemplo, un motor de c-c, y luego se excita el inducido con una c-
a de 60 Hz, continuará girando como un motor síncrono.
Su velocidad de sincronismo es 3.600 rpm. Si funciona con una
c-a de 50 Hz, su velocidad de sincronismo será de 3.000 rpm.
Mientras la carga no sea demasiado pesada, un motor síncrono gira a
su velocidad de sincronismo y solo a esta velocidad. Si la carga llega
a ser demasiado grande, el motor va disminuyendo velocidad, pierde
su sincronismo y se para. Los motores síncronos de este tipo
requieren todas unas excitaciones de c-c para el campo (o rotor), así
como una excitación de c-a para el estator.
Se puede fabricar un motor síncrono construyendo el rotor
cilíndrico normal de un motor tipo jaula de ardilla con dos lados
planos. Un ejemplo de motor síncrono es el reloj eléctrico, que debe
arrancarse a mano cuando se para. En cuanto se mantiene la c-a en
su frecuencia correcta, el reloj marca el tiempo exacto. No es
importante la precisión en la amplitud de la tensión.
Motores de jaula de ardilla
La mayor parte de los motores que funcionan con c-a de una
sola fase tienen el rotor de tipo jaula de ardilla. Los rotores de jaula
de ardilla reales son mucho más compactos y tienen un núcleo de
hierro laminado.
33
Universidad de Oriente
Los conductores longitudinales de la jaula de ardilla son de
cobre y van soldados a las piezas terminales de metal. Cada
conductor forma una espira con el conductor opuesto conectado por
las dos piezas circulares de los extremos. Cuando este rotor está
entre dos polos de campos electromagnéticos que han sido
magnetizados por una corriente alterna, se induce una fem en las
espiras de la jaula de ardilla, una corriente muy grande las recorre y
se produce un fuerte campo que contrarresta al que ha producido la
corriente (ley de Lenz). Aunque el rotor pueda contrarrestar el campo
de los polos estacionarios, no hay razón para que se mueva en una
dirección u otra y así permanece parado. Es similar al motor síncrono
el cual tampoco se arranca solo. Lo que se necesita es un campo
rotatorio en lugar de un campo alterno.
Cuando el campo se produce para que tenga un efecto
rotatorio, el motor se llama de tipo de jaula de ardilla. Un motor de
fase partida utiliza polos de campo adicionales que están alimentados
por corrientes en distinta fase, lo que permite a los dos juegos de
polos tener máximos de corriente y de campos magnéticos con muy
poca diferencia de tiempo. Los arrollamientos de los polos de campo
de fases distintas, se deberían alimentar por c-a bifásicas y producir
un campo magnético rotatorio, pero cuando se trabaja con una sola
fase, la segunda se consigue normalmente conectando un
condensador (o resistencia) en serie con los arrollamientos de fases
distintas.
Con ello se puede desplazar la fase en más de 20° y producir un
campo magnético máximo en el devanado desfasado que se adelanta
sobre el campo magnético del devanado principal.
Desplazamiento real del máximo de intensidad del campo
magnético desde un polo al siguiente, atrae al rotor de jaula de ardilla
con sus corrientes y campos inducidos, haciéndole girar. Esto hace
que el motor se arranque por sí mismo.
34
Universidad de Oriente
El devanado de fase partida puede quedar en el circuito o
puede ser desconectado por medio de un conmutador centrífugo que
le desconecta cuando el motor alcanza una velocidad
predeterminada. Una vez que el motor arranca, funciona mejor sin el
devanado de fase partida. De hecho, el rotor de un motor de
inducción de fase partida siempre se desliza produciendo un pequeño
porcentaje de reducción de la que sería la velocidad de sincronismo.
Si la velocidad de sincronismo fuera 1.800 rpm, el rotor de jaula
de ardilla, con una cierta carga, podría girar a 1.750 rpm. Cuanto más
grande sea la carga en el motor, más se desliza el rotor. En
condiciones óptimas de funcionamiento un motor de fase partida con
los polos en fase desconectados, puede funcionar con un rendimiento
aproximado del 75%.
Otro modo de producir un campo rotatorio en un motor,
consiste en sombrear el campo magnético de los polos de campo.
Esto se consigue haciendo una ranura en los polos de campo y
colocando un anillo de cobre alrededor de una de las partes del polo.
Mientras la corriente en la bobina de campo está en la parte
creciente de la alternancia, el campo magnético aumenta e induce
una fem y una corriente en el anillo de cobre. Esto produce un campo
magnético alrededor del anillo que contrarresta el magnetismo en la
parte del polo donde se halla él.
En este momento se tiene un campo magnético máximo en la
parte de polo no sombreada y un mínimo en la parte sombreada. En
cuanto la corriente de campo alcanza un máximo, el campo
magnético ya no varía y no se induce corriente en el anillo de cobre.
Entonces se desarrolla un campo magnético máximo en todo el polo.
Mientras la corriente está decreciendo en amplitud el campo
disminuye y produce un campo máximo en la parte sombreada del
polo.
35
Universidad de Oriente
De esta forma el campo magnético máximo se desplaza de la
parte no sombreada a la sombreada de los polos de campo mientras
avanza el ciclo de corriente. Este movimiento del máximo de campo
produce en el motor el campo rotatorio necesario para que el rotor de
jaula de ardilla se arranque solo. El rendimiento de los motores de
polos de inducción sombreados no es alto, varía del 30 al 50 por 100.
Una de las principales ventajas de todos los motores de jaula de
ardilla, particularmente en aplicaciones de radio, es la falta de
colector o de anillos colectores y escobillas. Esto asegura el
funcionamiento libre de interferencias cuando se utilizan tales
motores. Estos motores también son utilizados en la industria. El
mantenimiento que se hace a estos motores es fácil.
Motor síncrono
Los motores síncronos son un tipo
de motor eléctrico de corriente
alterna. Su velocidad de giro es
constante y depende de la frecuencia
de la tensión de la red eléctrica a la
que esté conectada y por el número
de pares de polos del motor, siendo
conocida esa velocidad como
“velocidad de sincronismo”.
La expresión matemática que relaciona la velocidad de la máquina
con los parámetros mencionados es:
Donde:
f: Frecuencia de la red a la que está conectada la máquina (Hz)
36
Universidad de Oriente
P: Número de pares de polos que tiene la máquina
p: Número de polos que tiene la máquina
n: Velocidad de sincronismo de la máquina (revoluciones por
minuto)
Por ejemplo, si se tiene una máquina de cuatro polos (2 pares de
polos) conectada a una red de 50 Hz, la máquina operará a 1.500
r.p.m.
Funcionan de forma muy similar a un alternador. Dentro de la
familia de los motores síncronos debemos distinguir:
1. Los motores síncronos.
2. Los motores asíncronos sincronizados.
3. Los motores de imán permanente.
Los motores síncronos son llamados así, porque la velocidad del
rotor y la velocidad del campo magnético del estator son iguales. Los
motores síncronos se usan en máquinas grandes que tienen una
carga variable y necesitan una velocidad constante. Arranque de un
motor trifásico síncrono.
Existen cuatro tipos de arranques diferentes para este
tipo de motor:
1. Como un motor asíncrono.
2. Como un motor asíncrono, pero sincronizado.
3. Utilizando un motor secundario o auxiliar para el arranque.
4. Como un motor asíncrono, usando un tipo de arrollamiento
diferente: llevará unos anillos rozantes que conectarán la rueda
polar del motor con el arrancador. Frenado de un motor trifásico
síncrono.
Por regla general, la velocidad deseada de este tipo de motor se
realiza por medio de un estator. El motor síncrono cuando alcance el
par crítico se detendrá, no siendo esta la forma más ortodoxa de
37
Universidad de Oriente
hacerlo. El par crítico se alcanza cuando la carga asignada al motor
supera al par del motor. Como comento, no es la forma apropiada
para detener el motor, se estropea si abusamos de ello, porque se
recalienta. La mejor forma de hacerlo, es ir variando la carga hasta
que la intensidad absorbida de la red sea la menor posible, entonces
desconectaremos el motor. Otra forma de hacerlo, y la más habitual,
es regulando el estator, con ello variamos la intensidad y podemos
desconectar el motor sin ningún riesgo.
Motores de Inducción
Los motores asíncronos o de
inducción son un tipo de motores
eléctricos de corriente alterna. El primer
prototipo de motor eléctrico capaz de
funcionar con corriente alterna fue
desarrollado y construido por el ingeniero
Nikola Tesla y presentado en el American
Institute of Electrical Engineers (en
español, Instituto Americano de
Ingenieros Eléctricos, actualmente IEEE)
en 1888.
El motor asíncrono trifásico está formado
por un rotor, que puede ser de dos tipos:
a) de jaula de ardilla; b) bobinado, y un
estátor, en el que se encuentran las
bobinas inductoras. Estas bobinas son
trifásicas y están desfasadas entre sí
120º. Según el Teorema de Ferraris,
cuando por estas bobinas circula un sistema de corrientes trifásicas,
se induce un campo magnético giratorio que envuelve al rotor. Este
38

Universidad de Oriente
campo magnético variable va a inducir una tensión en el rotor según
la Ley de inducción de Faraday:
Entonces se da el efecto Laplace (ó efecto motor): todo
conductor por el que circula una corriente eléctrica, inmerso en un
campo magnético experimenta una fuerza que lo tiende a poner en
movimiento. Simultáneamente se da el efecto Faraday (ó efecto
generador): en todo conductor que se mueva en el seno de un campo
magnético se induce una tensión.
El campo magnético giratorio, a velocidad de sincronismo,
creado por el bobinado del estator, corta los conductores del rotor,
por lo que se genera una fuerza electromotriz de inducción.
La acción mutua del campo giratorio y las corrientes existentes
en los conductores del rotor, originan una fuerza electrodinámica
sobre dichos conductores del rotor, las cuales hacen girar el rotor del
motor.
La diferencia entre las velocidades del rotor y el campo
magnético se denomina deslizamiento.
Reactancia de magnetización y reactancia de
dispersión
Reactancia de Magnetización: Se caracteriza porque posee
un entrehierro que es uniforme excepto por la presencia de las
ranuras. La reactancia de magnetización de la máquina de rotor
ciliacrilica se aplica al motor de inducción. Por tanto, parta un
embobinado del estator de m fases, se satura.
39
Universidad de Oriente
Reactancia de Dispersión: los métodos analíticos para los cálculos
de la reactancia de dispersión no son tan directo como los de
reactancia de magnetización. Mientras q la configuración de los
embobinados y de los circuitos magnéticos en el motor de inducción
es más complejo que en el transformador, los efectos de la reactancia
de dispersión son bastante semejantes en los dos.
Debido al entrehierro en las maquinas de c-a, la reactancia de
dispersión es mayor que en proporción a la reactancia de
magnetización que lo que es en los transformadores. Una relación
típica para un motor de inducción de 25-hp es de aproximadamente
de 0,05 comparado con un rango entre cerca de 0,09 y 0,20 para las
maquinas sincrónicas y motor cilíndrico. Como medida de
comparación, el transformador tiene una reactancia de dispersión
primaria de 0,463 ohm y una reactancia de magnetización primaria
de 10/0,069 dando como resultado una relación 0,0003. Aunque
cuando se tienen físicamente un solo flujo en el que la configuración
cambia en instante con las variaciones instantáneas de las corrientes
en el embobinado con respeto al tiempo, los flojos de dispersión
pueden dividirse en:
Flujo de dispersión de la ranura y flujos de dispersión de las partes
superior del diente.
Flujo de dispersión de la terminar de la bobina.
Flujo de dispersión de la diferencia entre hierro.
Constitución del motor asíncrono
Circuito magnético
La parte fija del circuito magnético es un anillo cilíndrico de
chapa magnética ajustado a la carcasa que lo envuelve. La carcasa
tiene una función puramente protectora. En la parte interior del
estator van dispuestos unas ranuras donde se coloca el bobinado
correspondiente.
40

Universidad de Oriente
En el interior del estator va colocado el rotor, que es un cilindro
de chapa magnética fijado al eje. En su periferia van dispuestas unas
ranuras en las que se coloca el bobinado correspondiente.
El entrehierro de estos motores es constante en toda su
circunferencia y su valor debe ser el mínimo posible
Circuitos eléctricos
Los dos circuitos eléctricos van situados uno en las ranuras del
estator (primario) y otro en las del rotor (secundario), que esta
cortocircuitado.
El rotor en cortocircuito puede estar formado por bobinas que
se cortocircuitan en el exterior de la maquina directamente o
mediante reóstatos; o bien, puede estar formado por barras de cobre
colocadas en las ranuras, que han de ser cuidadosamente soldadas a
dos anillos del mismo material, llamados anillos de cortocircuito. Este
conjunto de barras y anillos forma el motor jaula de ardilla.
También existen motores asíncronos monofásicos, en los cuales
el estator tiene un devanado monofásico y el rotor es de jaula de
ardilla. Son motores de pequeña potencia y en ellos, en virtud del
Teorema de Leblanc, el campo magnético es igual a la suma de dos
campos giratorios iguales que rotan en sentidos opuestos. Estos
motores monofásicos no arrancan por si solos, por lo cual se debe
disponer algún medio auxiliar para el arranque (fase partida:
resistencia o condensador, polo blindado).
Tipos Constructivos
El motor de jaula de ardilla consta de un rotor constituido por
una serie de conductores metálicos (normalmente de aluminio)
dispuestos paralelamente unos a otros, y cortocircuitados en sus
extremos por unos anillos metálicos, esto es lo que forma la llamada
jaula de ardilla por su similitud gráfica con una jaula de ardilla. Esta
41
Universidad de Oriente
‘jaula’ se rellena de material, normalmente chapa apilada. De esta
manera, se consigue un sistema n-fásico de conductores (siendo n el
número de conductores) situado en el interior del campo magnético
giratorio creado por el estator, con lo cual se tiene un sistema físico
muy eficaz, simple, y muy robusto (básicamente, no requiere
mantenimiento).
El motor de rotor bobinado tiene un rotor constituido, en vez de
por una jaula, por una serie de conductores bobinados sobre él en
una serie de ranuras situadas sobre su superficie. De esta forma se
tiene un bobinado en el interior del campo magnético del estator, del
mismo número de polos (ha de ser construido con mucho cuidado), y
en movimiento. Este rotor es mucho más complicado de fabricar y
mantener que el de jaula de ardilla, pero permite el acceso al mismo
desde el exterior a través de unos anillos que son los que
cortocircuitan los bobinados. Esto tiene ventajas, como la posibilidad
de utilizar un reostato de arranque que permite modificar la velocidad
y el par de arranque, así como el reducir la corriente de arranque.
En cualquiera de los dos casos, el campo magnético giratorio
producido por las bobinas inductoras del estator genera unas
corrientes inducidas en el rotor, que son las que producen el
movimiento.
Motor de Inducción Monofásico
Los motores monofásicos tienen un
gran desarrollo debido a su gran
aplicación en electrodomésticos,
campo muy amplio en su gama de
utilización, al que se suma la
motorización, la industria en general y
pequeñas máquinas herramienta. Este
tipo de motores tiene la particularidad
42
Universidad de Oriente
de que pueden funcionar con redes monofásicas, lo que los hace
imprescindibles en utilizaciones domésticas.
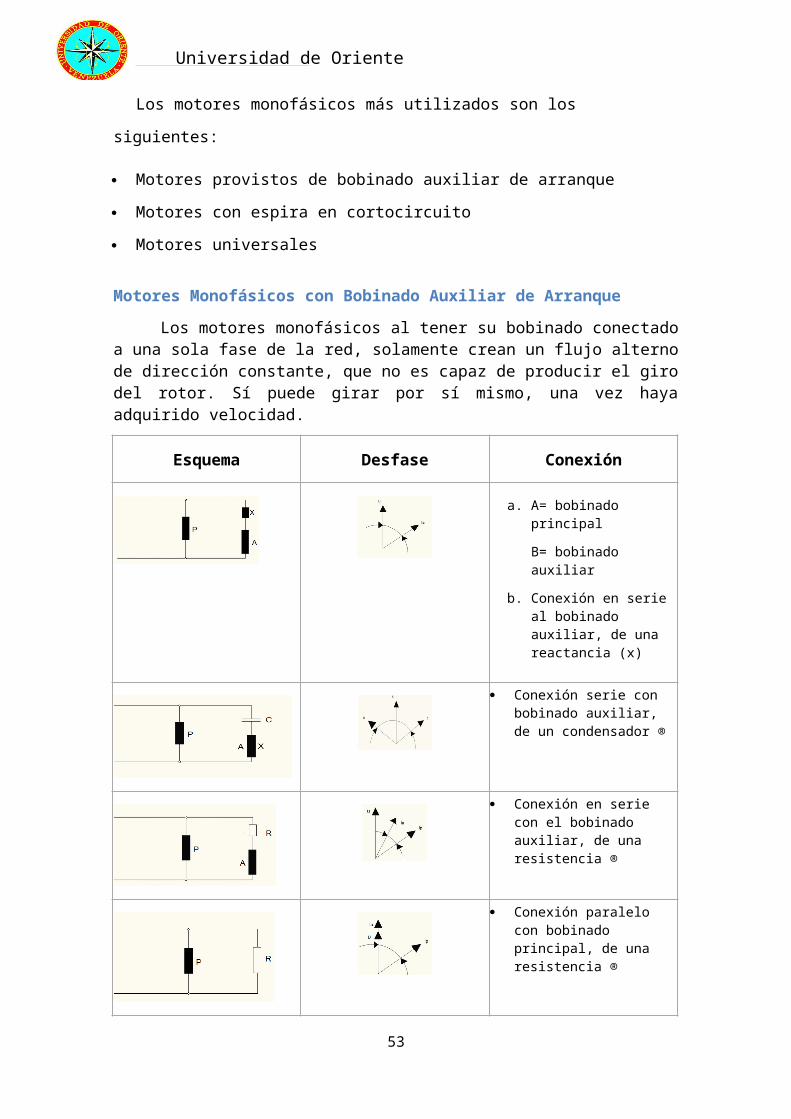
Los motores monofásicos más utilizados son los siguientes:
Motores provistos de bobinado auxiliar de arranque
Motores con espira en cortocircuito
Motores universales
Motores Monofásicos con Bobinado Auxiliar de Arranque
Los motores monofásicos al tener su bobinado conectado a una sola fase de la red, solamente crean un flujo alterno de dirección constante, que no es capaz de producir el giro del rotor. Sí puede girar por sí mismo, una vez haya adquirido velocidad.
Esquema Desfase Conexión
a. A= bobinado principal
B= bobinado auxiliar
b. Conexión en serie al bobinado auxiliar, de una reactancia (x)
Conexión serie con bobinado auxiliar, de un condensador ®
Conexión en serie con el bobinado auxiliar, de una resistencia ®
Conexión paralelo con bobinado principal, de una resistencia ®
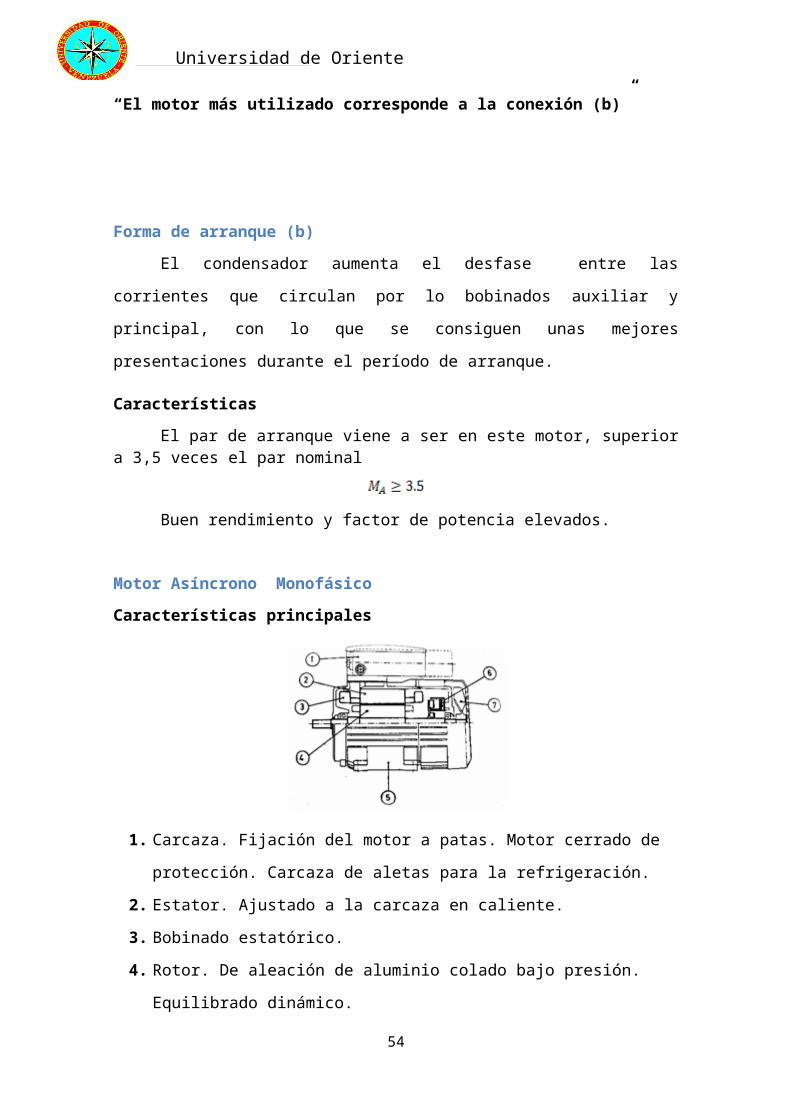
“El motor más utilizado corresponde a la conexión (b)”
43
Universidad de Oriente
Forma de arranque (b)
El condensador aumenta el desfase entre las corrientes que
circulan por lo bobinados auxiliar y principal, con lo que se consiguen
unas mejores presentaciones durante el período de arranque.
Características
El par de arranque viene a ser en este motor, superior a 3,5 veces el par nominal
Buen rendimiento y factor de potencia elevados.
Motor Asíncrono Monofásico
Características principales
1. Carcaza. Fijación del motor a patas. Motor cerrado de protección.
Carcaza de aletas para la refrigeración.
2. Estator. Ajustado a la carcaza en caliente.
3. Bobinado estatórico.
4. Rotor. De aleación de aluminio colado bajo presión. Equilibrado
dinámico.
5. Bobinado rotórico.
6. Colector.
7. Ventilación forzada.
8. Caja de bornas con condensador
44
Universidad de Oriente
9. incorporado.
Motor Universal
Los motores serie para corriente
alterna (motor serie monofásico)
llevan estator y rotor de chapa debido
a las pérdidas con corrientes
parásitas. El estator lleva polos
pronunciados en los que se aloja el
arrollamiento de excitación. La
construcción del motor universal es
semejante a la del motor de corriente
continua de excitación derivación Cuando el motor universal se
conecta a tensión alterna, cambian al mismo tiempo el sentido de la
corriente de excitación y del inducido. De esta manera, el par de giro
que se produce actúa siempre en el mismo sentido. Los motores
universales tienen un comportamiento en servicio semejante a los
motores de corriente continua de excitación derivación.
La corriente alterna provoca en el arrollamiento de excitación
una resistencia reactiva inductiva que reduce la intensidad de
corriente y la potencia del motor. Con el fin de limitar la resistencia
reactiva, los motores universales conectados a la corriente alterna
trabajan con un número reducido de espiras de excitación. Los
motores universales son los motores pequeños más utilizados.
Alcanzan velocidades superiores a los motores asincrónicos
monofásicos, y de esta manera se obtiene una potencia de
accionamiento grande para un tamaño pequeño. Como su inducido
generalmente va unido fijo al ventilador y al reductor, apenas existe
peligro de que se embale. Las interferencias de radio debidas al
45
Universidad de Oriente
chisporroteo de las escobillas se eliminan mediante condensadores
antiparasitarios. Los motores universales se utilizan, por ejemplo,
para accionamiento de máquinas electrodomésticas y pequeñas
herramientas eléctricas.
Motor Monofásico de Inducción
Teoría del motor monofásico de inducción
Si se interrumpe uno de los tres hilos de línea por los que se
alimenta un motor trifásico de inducción, de los llamados de <<jaula
de ardilla>>, cargado y a plena marcha, el motor seguirá marchando
normalmente a la misma velocidad que tenía anteriormente.
Únicamente su potencia habrá disminuido en un 20%
aproximadamente.
Motores Trifásicos de CA
Dentro de los motores de corriente alterna, nos encontramos la
clasificación de los motores trifásicos, asíncronos y síncronos. No hay
que olvidar que los motores bifásicos y monofásicos, también
son de corriente alterna.
Los motores trifásicos tienen ciertas características comunes:
En relación con su tensión, éstos motores cuando su utilidad es
industrial suelen ser de 230 V y 400 V, para máquinas de pequeña y
mediana potencia, siendo considerados de baja tensión. No
sobrepasan los 600 KW a 1500 r.p.m.
Los motores de mayor tensión, de 500, 3000, 5000, 10000 y
15000 V son dedicados para grandes potencias y los consideramos
como motores de alta tensión. Los motores que admiten
las conexiones estrella y triángulo, son alimentados por dos
tensiones diferentes, 230 V y 400 V, siendo especificado en su placa
de características.
Respecto a su frecuencia tenemos que decir que en Europa se
utilizan los 50 Hz, mientras que en América se utilizan los 60 Hz.
46
Universidad de Oriente
Aunque la frecuencia de red tenga fluctuaciones, siempre que no
superen el 1%, el motor rendirá perfectamente. Mayores
fluctuaciones afectará directamente sobre el rendimiento de su
potencia. De hecho, para variar la velocidad de esta clase de motores
se manipula la frecuencia.
Con respecto a la velocidad los motores trifásicos son construidos
para velocidades determinadas que corresponden directamente con
las polaridades del bobinado y la frecuencia de la red.
Respecto a la intensidad, el motor trifásico absorbe de la red la
intensidad que necesita, dependiendo siempre de la fase en que se
encuentre. Por ésta razón existen diferentes modos de arranques,
para ahorrar energía y preservar el motor.
En sobrecarga pueden asumir un incremento de la intensidad de
hasta 1.5 la intensidad nominal sin sufrir ningún daño durante dos
minutos.
También se tienen que tener en cuenta las pérdidas que tienen
los motores trifásicos, sus causas son varias. El rendimiento de los
motores de calculan en sus valores nominales, que son los indicados
en las placas de características. Presentan pérdidas de entrehierro,
por rozamiento, por temperatura y en el circuito magnético. Los
rotores de jaula de ardilla (con rotor en cortocircuito) son los más
usados por su precio y su arranque. En cambio, los motores de rotor
bobinado o también llamados de anillos rozantes necesitan ser
arrancados con resistencias rotóricas, lo que incrementa su precio y
su complejidad. Los motores de rotor cortocircuitado no llevan
escobillas, pero si las llevan los que son de colector y de rotor
bobinado.
Componentes de un Motor de Corriente Alterna
47
Universidad de Oriente
El motor eléctrico por excelencia en corriente alterna es el
motor de inducción o motor asíncrono trifásico, es el más utilizado
para el accionamiento de máquinas en la industria y gracias a la
electrónica de potencia está desbancando a otros tipos de motores de
corriente continua como por ejemplo en tracción eléctrica, su amplia
utilización es debido a su sencillez de mantenimiento, facilidad de
instalación, bajo coste y robustez.
Empezaremos con el motor trifásico asíncrono, estos pueden ser
de rotor en cortocircuito (el más utilizado) o de rotor bobinado.
Sus partes fundamentales son:
El estator, parte fija de la máquina donde van alojados las
bobinas inductoras, las tapas laterales o también llamadas escudos
que llevan dos cojinetes que permite el giro del rotor.
48
Universidad de Oriente
Estator
El rotor en cortocircuito, parte móvil de la máquina, bobinada
con unas barras de cobre o aluminio, introducidas en las ranuras y
que van soldadas a dos anillos, del mismo material, llamados anillos
de cortocircuito. Este conjunto se denomina jaula de ardilla por su
parecido a una jaula de ardilla. Existen motores con rotor de doble
jaula de ardilla.
Rotor
49
Universidad de Oriente
Partes de unmotor asíncrono trifásico
En esta imagen se puede apreciar el eje del motor que es el que
desarrollará la potencia útil del motor y es esa la potencia que viene
indicada en la placa de características del motor, observamos la caja
de bornes donde se efectúan las conexiones a la red y las aletas que
lleva es para refrigerar la máquina mediante las aspas que llevan casi
todos estos motores en la el escudo contrario al eje, es decir, cuando
funciona el motor al mismo tiempo un ventilador proporciona aire que
pasa a través de las aletas de refrigeración evacuando el calor que
produce la máquina.
Despiece motor
50
Universidad de Oriente
Arranque directo del motor
Cuando el motor tiene una potencia inferior a 0,75 Kw se puede
conectar de forma directa a la red, el motor dispone de tres bobinas
que se deben conectar a la red para que funcione, estas bobinas
pueden conectarse en estrella o en triángulo dependiendo de la
tensión que soporten las bobinas y de qué tensión sea la red trifásica.
En la placa de características nos encontraremos siempre dos
valores de tensión, el valor más pequeño de esos dos valores es la
tensión nominal que soporta cada bobina, es decir, si un motor
eléctrico nos indica que es 230/400 v, nos está indicando que la
tensión nominal que aguantan las bobinas es 230 voltios.
Unos ejemplos nos aclararán las ideas, si la red que tenemos es
de 230 V y el motor es de 230/400 v debemos conectar el motor en
triángulo ya que con esta conexión cada bobina recibirá 230 v.
Con la red trifásica de 400 v, y el mismo motor 230/400 v,
deberemos conectar el motor en estrella porque así cada bobinado
recibirá 400/√3 = 230 v, es decir, la tensión que soporta cada
bobina.
El motor dispone de unos puentes que se colocarán según las
fotos si se conectan en estrella o en triángulo.
51

Universidad de Oriente
Caja de bornes de un motor asíncrono
Arranque estrella-triángulo
Los motores de poca potencia pueden arrancarse directamente
como vimos en el apartado anterior, pero cuando las potencias
superan un valor se deben conectar los motores mediante algún
sistema de arranque para evitar la sobreintensidad de arranque
elevada que puede provocar perturbaciones en la red como por
ejemplo caídas de tensión inadmisibles. Un motor eléctrico en el
arranque puede consumir entre 6 y 8 veces la intensidad nominal.
Por otra parte el Reglamento Electrotécnico para Baja
Tensión en su ITC- BT-47 Instalación de receptores. Motores,
indica que aquellos motores de potencia superior a 0,75 Kw
deberán llevar dispositivos de arranque.
Existen diversos dispositivos de arranque mediante, resistencias
estatóricas, autotransformador, relés estáticos, variadores de
frecuencia, etc., pero en esta ocasión solamente trataré el clásico
arranque estrella-triángulo que todo electricista que se precie debe
conocer sin vacilar.
El arranque estrella-triángulo lo que hace es arrancar a tensión
reducida el motor asíncrono mediante la conexión estrella que se
hará a través de los contactores KM1 y KM3, una vez que el motor
alcanza el 80 % de su velocidad nominal, se desconecta la conexión
estrella, es decir, el contactor KM3 y se conecta la conexión triángulo,
el contactor KM2.
Al esquema de potencia colocado se refiere a (Comentarios):
52
Universidad de Oriente
A) En el arranque estrella-triángulo en la caja de bornes NO se debe
colocar ningún puente.
B) El relé térmico debe proteger tanto en una conexión como en otra,
es decir, durante todo el proceso de arranque.
Motores que se pueden conectar en estrella triángulo:
Red de 230 v y motor bitensión de 230/400 v
Red de 400 v y motor bitensión de 400/690 v
53
Universidad de Oriente
En estas gráficas se puede observar la diferencia de intensidad
consumida y el par entre el arranque directo y la estrella-triángulo.
Se puede ver que en el caso de la gráfica de intensidad la
corriente en arranque directo consume el motor 6 A, mientras que
cuando lo hace en conexión estrella consume 2 A para pasar a
consumir 3 A al entrar en triángulo.
Comparación el Arranque directo y el Estrella-Triangulo
La primera cifra corresponde al arranque directo y la segunda
a estrella-triángulo:
- Corriente de arranque: 100 % - 33%.
- Sobrecarga de la línea: 4 a 8 In – 1,3 a 2,6 In.
- Par inicial en el arranque: 0,6 a 1,5 Cn – 0,2 a 0,5 Cn.
- Mando: todo/nada – todo/nada.
- Tiempos de arranque: 2 a 3 segundos – 3 a 7 segundos.
Ventajas arranque directo:
- Arrancador simple y económico.
- Par de arranque importante.
Inconvenientes arranque directo:
- Punta de corriente muy importante.
- Arranque muy brusco.
54
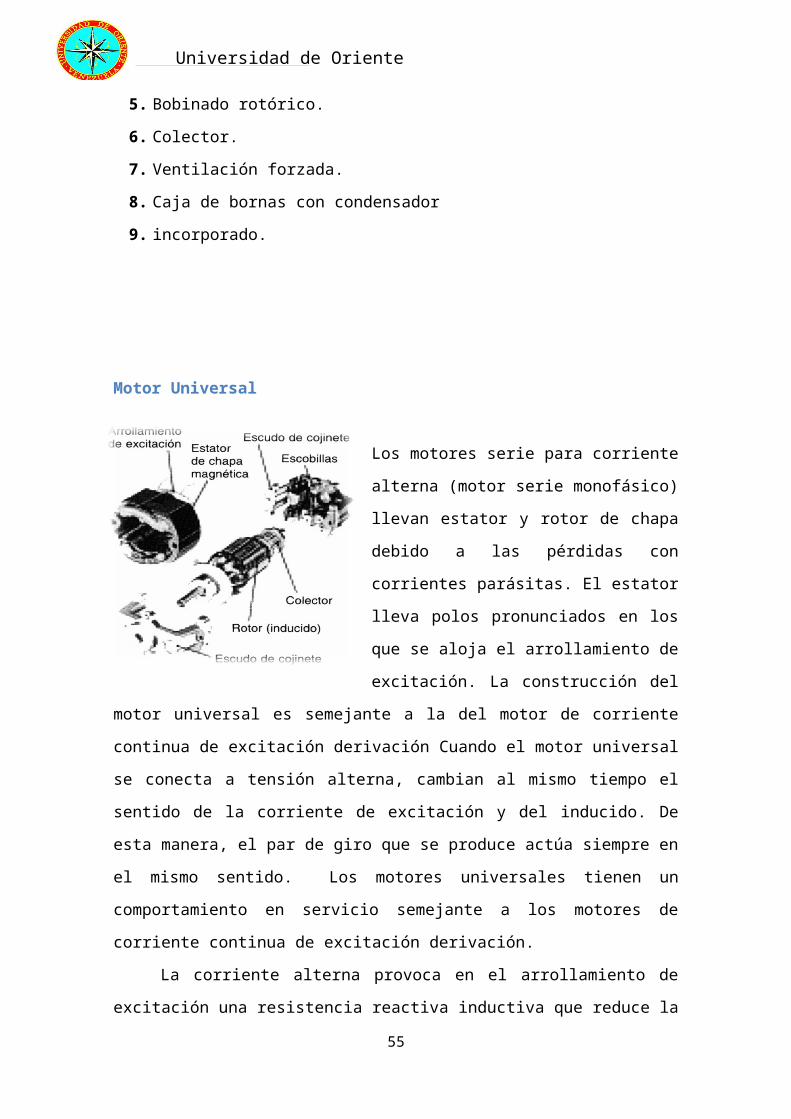
Universidad de Oriente
Ventajas arranque estrella-triángulo:
- Arrancador económico.
- Buena relación par/corriente.
Inconvenientes arranque estrella-triángulo:
- Débil par de arranque sin posibilidad de ajuste.
- Corte de tensión en el cambio de acoplamiento.
- Motor de 6 bornas.
Arranque Tensión Reducido
Debido a su relativamente bajo valor de la reactancia de
dispersión, los motores de dispersión de jaula de ardilla de diseño A,
toman una alta corriente de arranque que pueden dar lugar a una
cagar excesiva en el circuito de alimentación al motor en tal
instalación, el par de arranque requerido es usualmente bajo y la
corriente de arranque se disminuye reduciendo el voltaje a bajo de lo
normal durante el arranque. A medida que el motor alcanza la
velocidad nominal, se aplica el voltaje nominal. El método más común
es el método de arranque con voltaje reducido o de tensión reducido,
que generalmente tiene derivaciones de voltaje de 65 a 80% para
motores de 50hp y 50 y 80% para motores más grandes usualmente
se selecciona la derivación de voltaje más baja pues permite que el
motor se acelere. El autotransformador puede ser trifásico con un
embobinado para cada fase o puede ser un transformador trifásico
con delta abierta.
55

Universidad de Oriente
Conclusión
No se sabe a ciencia cierta si aquellas invenciones no pasaron
de ser meros juguetes y, aunque se ha supuesto que fueron
empleadas para mover objetos en los templos durante los rituales, no
deja de sorprender el hecho de que desde los tiempos de Herón no se
hayan encontrado evidencias de que las Maquinas y Motores se
hayan utilizado con un propósito práctico.
Entre las reliquias de la civilización egipcia encontramos el
primer registro conocido de una máquina r en el manuscrito de Herón
de Alejandría titulado Spiritalia seu Pneumatica. Los aparatos allí
descritos no se sabe con certeza si fueron obra del ingenio de Herón,
porque él mismo dice en su obra que su intención no es otra que
recopilar las máquinas que ya eran conocidas y añadir las inventadas
por él. Nada en el texto indica quién pudo ser el artífice de los
56
Universidad de Oriente
dispositivos descritos y se sospecha que muchos puedan ser, en
realidad, obra de Ctesibio, de quien Herón fue pupilo.
En la actualidad se reconsidera el hecho de que la corriente
implica variables indispensables para la vida humana (Diodo,
Motores, Maquinas, Modos Trifásicos y Monofásicos), por tanto la
corriente tanto Alterna como Continua constituyen determinantes
considerables para construcción de EQUIPOS AVISMALES.
“”Las máquinas es su grito, su quimera, su panacea. Aparatos que
ahorran mano de obra, suplantadores, cancones, monstruos
manufacturados para matarse unos a otros, repulsivos trasgos
producidos por una horda de lujurias capitalistas mediante nuestra
prostituida mano de obra””
James Joyce
Bibliografía
Manuel de la Fuente Merás: Una mirada a los inicios de la
máquina/ En la España Imperial
Agencia: Directiva 2006/42/CE del Parlamento Europeo y del
Consejo de 17 de mayo de 2006 relativa a las máquinas y por
la que se modifica la Directiva 95/16/CE (refundición), DOUE
L 157 de 9.6.2006, p. 24/86.
57

Universidad de Oriente
http://www.carluvers.com/cars/Internal_combustion_engine.
Revisado el 6 de Marzo del 2011. Operaciones Unitarios
para la Ingeniería Eléctrica (Motores y Maquinas)
García, Pablo (2007). La Cadena Tricolor. Grupo Biblioteca
Escolar
(3 Ed.). Caracas: Venezuela.
Gibson. J. E. and F. B. Tutuer, Control System Components.
New York; Mc-Graw-Hill Book Company. 1958.
Kimball. A. W., “Two-Stage Rototrol for Low-Energy
Regulating Systems,” Trans. ATEE. 1968 , Part I (1949), pp.
1119-1124
58