Mecanica Dinamica-(Parte 1)
10
AUTOR: PROF. RAFAEL MEDINA MECÁNICA DINÁMICA.- Este curso está basado en la mecánica Clásica, desarrollada a partir de los principios y teoremas de Newton y la aplicaremos a sistemas discretos formados por masas puntuales y a sólido rígidos. Por otro lado, en la mecánica juega un papel importante las matemáticas, ya que se basa en modelos Matemáticos que interpretan observaciones experimentales. Sin embargo, las matemáticas no son un fin en sí, sino un medio para interpretar conceptos y fenómenos (movimiento). Adicionalmente, mediante sistemas de referencia, basados en los conceptos de espacio y tiempo, podremos describir el comportamiento mecánicos de los sistemas asociados. OBJETIVOS ESPECÍFICOS.- En esta asignatura se aplicarán los conceptos, fórmulas, y las leyes de la mecánica clásica (mecánica teórica) al problema de comprender la cinemática y la cinética presente en el movimiento de un mecanismo (o de una máquina) El aspecto cinemático se orientará hacia dos áreas: 1.-Cálculo de las velocidades y aceleraciones absolutas de puntos geométricos pertenecientes a los elementos que constituyen el sistema mecánico estudiado, para un instante de tiempo dado. 2.-El cálculo de las velocidades y aceleraciones angulares absolutas, de los elementos que constituyen el sistema a estudiar (elementos de un mecanismo), para un instante de tiempo dado. En relación al aspecto dinámico, se tratará del cálculo de las fuerzas, momentos de Fuerzas y potencia que intervienen en el sistema estudiado. Sólo como estrategia, este estudio se “desligará” de la cinemática. Sin embargo sabemos que esto no es posible, y la suma de ambos aspectos conducirá al estudiante al estudio de la dinámica de la máquina o del mecanismo que se estudia y, junto a otras herramientas, le permitirá afrontar cuestiones relacionadas al diseño mecánico. LA MÁQUINA Y SUS COMPONENTES.- Máquinas son estructuras mecánicas que reducen el esfuerzo necesario para realizar un trabajo. En casi todas las máquinas podemos encontrar los siguientes fundamentales:
-
Upload
rafael-medina -
Category
Documents
-
view
265 -
download
1
description
Conceptos preeliminares en el área de mecánica con aplicaciones a mecanismos.
Transcript of Mecanica Dinamica-(Parte 1)

AUTOR: PROF. RAFAEL MEDINA
MECÁNICA DINÁMICA.-
Este curso está basado en la mecánica Clásica, desarrollada a partir de los principios y teoremas de Newton y la aplicaremos a sistemas discretos formados por masas puntuales y a sólido rígidos.
Por otro lado, en la mecánica juega un papel importante las matemáticas, ya que se basa en modelos Matemáticos que interpretan observaciones experimentales. Sin embargo, las matemáticas no son un fin en sí, sino un medio para interpretar conceptos y fenómenos (movimiento). Adicionalmente, mediante sistemas de referencia, basados en los conceptos de espacio y tiempo, podremos describir el comportamiento mecánicos de los sistemas asociados.
OBJETIVOS ESPECÍFICOS.-
En esta asignatura se aplicarán los conceptos, fórmulas, y las leyes de la mecánica clásica (mecánica teórica) al problema de comprender la cinemática y la cinética presente en el movimiento de un mecanismo (o de una máquina)
El aspecto cinemático se orientará hacia dos áreas:
1.-Cálculo de las velocidades y aceleraciones absolutas de puntos geométricos pertenecientes a los elementos que constituyen el sistema mecánico estudiado, para un instante de tiempo dado.
2.-El cálculo de las velocidades y aceleraciones angulares absolutas, de los elementos que constituyen el sistema a estudiar (elementos de un mecanismo), para un instante de tiempo dado.
En relación al aspecto dinámico, se tratará del cálculo de las fuerzas, momentos de Fuerzas y potencia que intervienen en el sistema estudiado. Sólo como estrategia, este estudio se “desligará” de la cinemática. Sin embargo sabemos que esto no es posible, y la suma de ambos aspectos conducirá al estudiante al estudio de la dinámica de la máquina o del mecanismo que se estudia y, junto a otras herramientas, le permitirá afrontar cuestiones relacionadas al diseño mecánico.
LA MÁQUINA Y SUS COMPONENTES.-
Máquinas son estructuras mecánicas que reducen el esfuerzo necesario para realizar un trabajo. En casi todas las máquinas podemos encontrar los siguientes fundamentales:
Estructura (BANCADA)
Motor (elemento de entrada o motriz)
Mecanismos
Actuadores
Circuitos

AUTOR: PROF. RAFAEL MEDINA
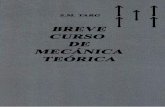
TIPOS DE MECANISMOS.-Los mecanismos son elementos o combinaciones de elementos que transforman las fuerzas y los movimientos. Así nos permiten modificar su dirección e intensidad hasta lograr los que necesitamos. Algunos tipos de mecanismos son:
Engranajes
Figura 1.a Figura 1.b
Poleas
Poleas
Figura 1.c Figura 1.d
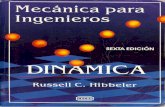
SISTEMA DE TRANSMISIÓN.- Los sistemas de transmisión son mecanismos que se emplean para transmitir movimientos de un eje a otro. Existen varios sistemas:
Transmisión mediante ruedas de fricción: Al girar una hace girar a la otra en sentido contrario. Los ejes de las ruedas deben estar muy próximos y pueden ser paralelos o que se corten (figura 2 ).
Transmisión mediante poleas y correa: Los ejes de las ruedas pueden estar muy alejados y pueden estar paralelos o cortarse.
Transmisión mediante piñones y cadena: son mecanismos compuestos por dos ruedas dentadas unidas mediante una cadena. Se comportan como las transmisiones mediante poleas y correa.
Figura 2.-
OTROS CONCEPTOS PREELIMINARES.-
A.-MAQUINAS
Es un dispositivo o conjunto de mecanismos que transforman o transmiten energía. También puede definirse como un conjunto de mecanismos dispuestos para transmitir fuerzas y realizar trabajo. Ejemplos: batidora o mezcladora de alimentos, puerta de la bóveda de un banco, engranaje de transmisión de un automóvil y robot.
Palanca
Cigüeñal

AUTOR: PROF. RAFAEL MEDINA
B.-MECANISMOS (ESLABONAMIENTO)
Son ensamblajes o sistemas de elementos sólidos conectados por uniones que se mueven uno sobre otro con un movimiento relativo definido. Conjunto de elementos mecánicos que hacen una función determinada en una máquina.
Ejemplos: BIELA-MANIVELA, LEVA-VARILLA.
C.-ESLABON
Los cuerpos sólidos que forman parte de un mecanismo se denominan (eslabones). Un eslabón tiene dos o más elementos de conexión (pares), por medio de los cuales se pueden unir a otros elementos con el fin de transmitir fuerza o movimiento. El número de nodos le da su nombre al eslabón: Binario = dos nodos, Terciario = tres nodos, etc. Además, un eslabón tiene en ambos extremos la posibilidad de conectarse con otros dos eslabones. Sin embargo, esto se puede extender a tres o cuatro o incluso hasta más conexiones.
PARES CINEMATICOS.-
Se llaman pares cinemáticos a las formas geométricas mediante las cuales se unen dos eslabones de un mecanismo de manera que el movimiento relativo entre ambos sea consistente. Como consecuencia, los pares cinemáticos permiten el movimiento relativo en alguna dirección mientras restringen el movimiento en otras direcciones.
CLASIFICACIÓN DE LOS PARES CINEMÁTICOS:
1.-Atendiendo a la región de contacto entre los eslabones.
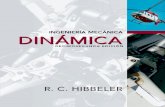
1.1.-Superiores.-Estos También llamados de contacto lineal o puntual, por ejemplo: leva-varilla (ver figura 3), cojinetes de bolas, engranes.
Ejemplo de par superior. leva-varilla
1.2.-Inferiores. Son conocidos también como pares de contacto superficial. Las superficies de los eslabones son geométricamente similares. Ejemplo de par inferior: cilindro-embolo.
2.-Atendiendo al movimiento relativo entre las partes. De primer grado o lineal: cuando cualquier punto de uno de los eslabones describe una línea en su movimiento relativo respecto del otro eslabón del par.
(cilindro-embolo)
Figura 3

AUTOR: PROF. RAFAEL MEDINA
2.1.-De primer grado
2.1.1.-Prismático
2.1.2.-Revoluta
2.1.3.-Helicoidal.- Par helicoidal: un punto P describe una hélice.
2.2.-De segundo grado o superficial.- Cuando cualquier punto de uno de los eslabones describe una superficie en su movimiento relativo respecto del otro eslabón del par.
2.2.1.-Par plano
2.2.2.-Par cilíndrico
2.2.3.-Par esférico
3.-Al tipo de rozamiento.
3.1.-Par con Deslizamiento
3.2.-Par con rodadura
3.3.-Par con pivotamiento
4.-A l número de grados de libertad: I,II,III,IV,V
5.-Al número de eslabones que conecta: Binario, etc.
DIFERENTES ESLABONES.-Un eslabón tiene en ambos extremos la posibilidad de conectarse con otros dos eslabones. Sin embargo, esto se puede extender a tres o cuatro o incluso hasta más conexiones.
Elemento Forma típica Representación cinemática
Prismático
RevolutaRevoluta
Helicoidal
Plano
Cilíndrico
Esférico

AUTOR: PROF. RAFAEL MEDINA
Otro aspecto importante es la identificación de los eslabones con base en el tipo de movimiento. De este modo, y usando la figura, se muestra algunos ejemplos.
Bancada (Frame).- Es el eslabón fijo de un mecanismo. Normalmente se identifica con el número uno.
Manivela (Crank).-Eslabón con un eje de rotación fijo, el cual describe un movimiento de rotación completa.
Balancín (Rocker).-Eslabón que oscila un cierto ángulo y regresa su dirección, en un cierto intervalo, alrededor de un eje de rotación fijo.
Biela (Coupler).- Este eslabón no posee ejes de rotación fijos en ningún punto y tiene movimiento plano general. Este eslabón, también llamado acoplador, comúnmente conecta a los eslabones de entrada y salida.
Bancada Manivela
Balancín

AUTOR: PROF. RAFAEL MEDINA
Corredera (Slider).-Eslabón que posee un movimiento de traslación a lo largo de la bancada.
Collarín (Slider).-Eslabón que se desliza a lo largo de un eslabón móvil.
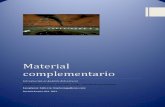
DIAGRAMAS CINEMÁTICOS (KINEMATIC DIAGRAMS).- Para el análisis del movimiento de una máquina, es frecuentemente difícil visualizar el movimiento de los componentes de un dibujo de ensamble completo; Como se puede ver en la figura 4, un esquema de la máquina completa se vuelve complejo, y es difícil localizar el movimiento del mecanismo a considerar. (Un motor produce una fuerza rotacional, el cual impulsa a un mecanismo que mueve el cigüeñal de un equipo sincronizado)
Ejemplo 1. La figura 5 muestra una guillotina, la cual es usada para cortar tablillas laminadas electrónicas. Dibuje el diagrama cinemático.
SOLUCIÓN:
1. Identifique la bancada o eslabón fijo.El primer paso para construir un diagrama cinemático es decidir la pieza que será designada como la bancada. El movimiento de todos los demás eslabones será relativo con respecto a la
Corredera Collarín
Figura 4
Figura 5

AUTOR: PROF. RAFAEL MEDINA
bancada.La bancada será etiquetada como el eslabón 1.
2. Identifique los demás eslabones.
Eslabón 2: Balancín
Eslabón 3: Corredera
Eslabón 4: Biela
3. Identifique los pares cinemáticos. Existen tres revolutas que son usadas para conectar tres eslabones diferentes. Esas revolutas son R12, R23 y R34. El cortador representará un par prismático, ya que se desliza a lo largo de la bancada. Este par prismático es P14. Debido a que este par cinemático posee el número 1, este par también será, como anteriormente se marcó, una corredera.
4. Identifique algún punto de interés. Finalmente, el movimiento del extremo del maneral (balancín) es deseado. Este es designado como el punto de interés X.
5. Dibuje el diagrama cinemático.
Ejercicio.- La figura 6 muestra la pinza de presión. Dibuje el diagrama cinemático.
GENERALIDADES SOBRE ELEMENTOS DE MACANSMOS
Ley de Grashof (Grashof´s condition).-Esta ley afirma que, para un mecanismo de cuatro barras, la suma de las longitudes más corta y más larga de los eslabones no puede ser mayor que la suma de las longitudes de los dos eslabones restantes, si se desea que exista una rotación relativa continua entre dos elementos.
I.- Si el eslabón más corto está adyacente al eslabón fijo (bancada), se tiene un mecanismo del tipo manivela - balancín, donde el eslabón de entrada es la manivela y el eslabón de salida es el balancín.
donde:"s" es el eslabón más corto del mecanismo."l" es el eslabón más largo del mecanismo."p" y "q" son las longitudes de los otros dos eslabones.En caso de que se cumpla esta ley, se tienen los siguientes tres mecanismos:
Figura 6

AUTOR: PROF. RAFAEL MEDINA
II.- Si el eslabón más corto el es fijo (bancada), se tiene un mecanismo del tipo doble manivela, donde los eslabones de entrada y salida giran completamente alrededor de sus respectivos ejes de rotación.
III.- Mecanismo de doble balancín (de Grashof)
A partir de la cadena cinemática de 4 barras se obtiene este mecanismo cuando la barra más corta (s) es el acoplador. Este mecanismo está formado por dos balancines articulados a la barra fija y un acoplador que puede dar vueltas completas. (Para el estudiante: hacer diagrama)
CADENA CINEMÁTICA y GRADOS DE LIBERTAD.- El número de grados de libertad (GDL) de un sistema es el número de parámetros o variables independientes que se necesitan para definir unívocamente su posición en el espacio en cualquier instante.
El reconocer que un eslabón de todo mecanismo siempre se considera fijo con respecto a la bancada hace que el mecanismo pierda tres grados de libertad. Esto deja al sistema un total de 3n-3 ó 3(n-1) grados de libertad. Cada unión de un grado de libertad le quita dos grados de libertad al sistema. De manera similar, cada unión de dos grados de libertad le quita un grado de libertad al sistema. La movilidad total del sistema está dada por la ecuación de Grübler.
Donde:
M = movilidad o número de grados de libertad
n = número de eslabones (incluyendo la bancada)
f1 = número de uniones de un grado de libertad (pares inferiores: pernos o correderas)
f2 = número de uniones de dos grados de libertad (pares superiores: levas o engranes
Movilidad (M).-
La movilidad de un mecanismo es el número de grados de libertad que posee. En forma equivalente también se puede definir la movilidad como el número mínimo de parámetros independientes requeridos para especificar la posición de cada uno de los eslabones de un mecanismo.